一种基于博弈论的移动位置跟踪算法
移动机器人路径规划和轨迹跟踪算法

移动机器人路径规划和轨迹跟踪算法在当今科技迅速发展的时代,移动机器人正逐渐成为各个领域的重要工具,从工业生产中的自动化运输,到医疗领域的服务机器人,再到家庭中的智能清洁设备,它们的身影无处不在。
而要让这些移动机器人能够高效、准确地完成任务,路径规划和轨迹跟踪算法就显得至关重要。
路径规划,简单来说,就是为移动机器人找到一条从起始点到目标点的最优或可行路径。
这就好像我们出门旅行,需要规划出一条既省时又省力的路线。
而轨迹跟踪,则是让机器人能够按照预定的路径或轨迹准确地移动,避免偏离“既定路线”。
在路径规划方面,有许多不同的方法和策略。
其中,基于地图的规划方法是比较常见的一种。
就好比我们在手机上使用地图导航,机器人也需要一个对其工作环境的“地图”认知。
这个地图可以是事先通过传感器获取并构建的,也可以是根据机器人在运行过程中的实时感知不断更新完善的。
例如,栅格地图法将工作空间划分为一个个小的栅格,每个栅格都有相应的状态标识,比如是否可通行。
通过对这些栅格的分析和计算,机器人就能找到可行的路径。
这种方法简单直观,但对于复杂环境可能会出现精度不够或者计算量过大的问题。
另外,还有基于几何形状的规划方法。
比如,利用圆形、矩形等简单几何图形来描述机器人和障碍物的形状和位置,通过几何运算来确定可行路径。
这种方法在一些规则环境中效果较好,但对于形状不规则的障碍物处理起来可能就比较棘手。
除了这些传统方法,近年来随着人工智能技术的发展,一些基于深度学习的路径规划算法也逐渐崭露头角。
通过让机器人学习大量的环境数据和路径样本,它能够自动生成适应不同环境的路径规划策略。
轨迹跟踪算法则致力于确保机器人能够精准地沿着规划好的路径移动。
常见的轨迹跟踪算法包括 PID 控制算法、模型预测控制算法等。
PID 控制算法是一种经典的控制算法,它通过比例、积分和微分三个环节的作用,来调整机器人的控制输入,从而使机器人的实际轨迹尽量接近预定轨迹。
移动目标跟踪的算法研究及其应用
移动目标跟踪的算法研究及其应用第一部分:前言随着技术的发展和智能化的进步,移动目标跟踪的应用越来越广泛。
移动目标跟踪的核心是找到目标并跟踪它,因而算法的优劣直接决定着跟踪结果的好坏。
在本文中,我们将探讨一些常见的移动目标跟踪算法,以及它们在实际应用中的情况。
第二部分:常见的移动目标跟踪算法1. 卡尔曼滤波器算法卡尔曼滤波器是一种线性滤波器,可以用来估计系统的状态。
在移动目标跟踪中,卡尔曼滤波器的应用主要是用来估计目标的轨迹和速度等状态参数。
卡尔曼滤波器算法具有简单、实用、鲁棒性强的特点,在很多应用中得到了广泛的应用。
2. 粒子滤波器算法粒子滤波器算法是一种非参数滤波器,与卡尔曼滤波器相比具有更好的适应性和精度。
在移动目标跟踪中,粒子滤波器算法用来估计目标的状态,可以有效地解决一些卡尔曼滤波器无法解决的问题,如非线性系统和非高斯噪声。
3. CAMShift算法CAMShift算法是一种基于颜色直方图的目标跟踪算法,它的核心思想是通过更新目标直方图的方式来实现目标跟踪。
CAMShift算法具有实时性好、可靠性高、鲁棒性强等特点,在很多应用场景中得到了广泛的应用。
第三部分:移动目标跟踪算法的应用1. 智能监控移动目标跟踪算法在智能监控领域有广泛的应用。
通过对监控视频中的移动目标进行跟踪,可以实现对物品的自动识别、实时监控、监控报警等功能,提高监控系统的安全性和智能化程度。
2. 交通管控移动目标跟踪算法在交通管控领域同样有着广泛的应用。
通过对交通视频中的车辆进行跟踪,可以实现对交通流量、拥堵等情况的实时统计,帮助交通部门进行交通治理,提高道路的通行效率和安全性。
3. 智能机器人移动目标跟踪算法在智能机器人领域也有很大的应用潜力。
通过对机器人视觉信息的处理,可以实现机器人的导航、目标抓取、环境识别等功能,为机器人的智能化发展打下基础。
第四部分:总结总的来说,移动目标跟踪算法是计算机视觉领域中的重要研究方向之一,也是实际应用中必不可少的一种算法。
2022年专业技术人员继续教育公需科目人工智能与健康考题
2022 年专业技术人员连续教育公需科目人工智能与安康考题一、单项选择1.在高血压诊断标准的变迁史上,〔〕将高血压的诊断标准定为120/80mmHg以下更受益。
A.1949 年B.1984 年C.1993 年D.2022 年我的答案:D √答对2.我国在语音语义识别领域的领军企业是〔〕。
A.科大讯飞B.图谱科技C.阿里巴巴D.华为我的答案:A √3.中国人工智能产业初步呈现集聚态势,人工智能企业主要集聚在经济兴旺的一二线城市及沿海地区,排名第一的城市是〔〕。
A.上海B.北京C.深圳D.杭州我的答案:B √4.M IT教授Tomaso Poggio明确指出,过去15年人工智能取得的成功,主要是由于〔〕。
A.计算机视觉B.语音识别C.博弈论D.机器学习我的答案:D √5.1997年,Hochreiter&Schmidhuber提出〔〕。
A.反向传播算法B.深度学习C.博弈论D.长短期记忆模型我的答案:D √6.〔〕,政治局就人工智能进呈现状和趋势进展第九次集体学习。
A.2022年3 月15 日B.2022 年10 月31 日C.2022 年12 月31 日D.2022 年1 月31 日我的答案:B √7.〔〕是指能够自己找出问题、思考问题、解决问题的人工智能。
A.超人工智能B.强人工智能C.弱人工智能D.人工智能我的答案:B √8.据清华原副校长施一公教授争论,中国每年有265万人死于〔〕,占死亡人数的28%。
A.癌症B.心脑血管疾病C.神经退行性疾病D.交通事故我的答案:A √9.2022年,美国一份癌症统计报告说明:在全部死亡缘由中,癌症占〔〕。
A.1/4B.1/3C.2/3D.3/4我的答案:A √10.〔〕是自然语言处理的重要应用,也可以说是最根底的应用。
A.文本识别B.机器翻译C.文本分类D.问答系统我的答案:C √11.〔〕是人以自然语言同计算机进展交互的综合性技术,结合了语言学、心理学、工程、计算机技术等领域的学问。
基于势博弈的分布式目标跟踪传感器分配算法

Tr a c k i ng Ba s e d O i l Po t e n t i a l Ga I ne
RAN Xi a o mi n FANG De l i a n g
( I n s t i t u t e 0 , I n f o r ma t i o n S y s t e m E n g i n e e r i n g , I n f o ma r t i o n E n g i n e e i r n g U n i v e r s i t y o f P己 , Z h e n g z h o u 4 5 0 0 0 1 , C h i n a )
第3 9卷 第 l 1 期 2 0 1 7 年1 1 月 电子来自与信息
学
报
Vb 1 . 3 9 NO . 1 1 NO V . 2 0 1 7
J o u r n a l o f El e c t r o n i c s& I n f o r ma t i o n Te c h n o l o g y
P r e c i s i o n( G D O P ) i s u s e d t o e s t a b l i s h t h e s e n s o r a l l o c a t i o n g a me mo d a l w i t h l o c a l i n f o r m a t i o n , a n d i t i s p r o v e d t o
时借鉴通信 网中的载波侦听 多路访 问机制 , 设计 了一种完全分布式 的决 策节 点推 选机制 , 更加 符合 无线传感器 网络
自组织 的特 性 。仿真结果表 明所提算 法在收敛速度 、跟踪精度和 能量 有效性方面的优势 。 关键 词:无线传感器 网络 ; 目标跟踪 ;传 感器选择 ;势博弈
一种基于直推式回归的移动跟踪算法
3移 动 跟 踪
对 于 移 动 节 点 跟 踪 ,需 要 对 上 节 的位 置 估 计 进 行 平 滑 , 假
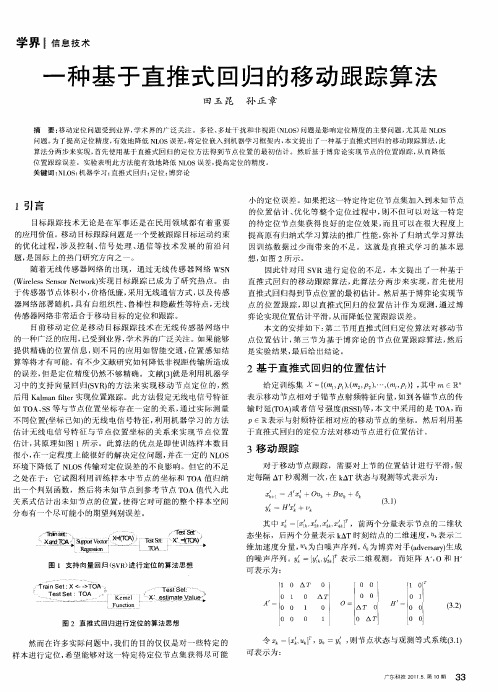
环 境 下 降低 了 N O L S传 输 对 定 位 误 差 的 不 良影 响 。但 它 的不 足 之 处在 于 :它 试 图利 用 训 练 样 本 中节 点 的 标 和 T A 值 归 纳 O 出 一个 判 别 函数 ,然 后 将 未 知 节 点到 参 考 节 点 T A值 代 入 此 O
算法分两步来实现, 首先使用基于直推式 回归的定位方法 得到节点位置 的最初估计 。然后基 于博 弈论实现节点的位置跟踪 , 从而 降低
位 置 跟 踪 误 差 低 N OS误 差 , 高 定位 的精 度 。 L 提 关 键 词 : I S 机 器学 习 ; 推 式 回归 ; 位 ; 弈 论 N ; O 直 定 博
估 计 , 原 理 如 图 1 示 。此 算 法 的优 点 是 即使 训 练样 本 数 目 其 所 很 小 , 一定 程 度 上 能很 好 的解 决 定位 问题 , 在 ~ 定 的 N O 存 并 LS
2基 于直 推 式 回 归 的位 置估 计
给 定 训 练 集 X = ( , ( :P ) ( P , 中 m ∈R { P) ,:, 其 , …, 表示移动节点相对于锚节 点射频特征 向量 , 如到各锚 节点 的传 输 时 延 f0 1 者 信 号 强 度 ( S I , 文 中采 用 的 是 T A, T A或 R S) 本 等 O 而 P∈R表 示 与 射 频 特 征 相 对 应 的移 动 节 点 的坐 标 。然 后 利 用 基
f rl s e sr ew r) 现 目标 跟 踪 已成 为 了研 究 热 点 。 由 Wi e no tok实 esS N
一种基于博弈论的移动边缘计算资源优化方法及装置
一种基于博弈论的移动边缘计算资源优化方法及装置
本文提出了一种基于博弈论的移动边缘计算资源优化方法及装置。
该方法采用博弈论的思想,在移动边缘计算场景中对资源进行优化分配,以实现最大化社会福利的目标。
具体而言,该方法首先对移动设备和边缘服务器之间的博弈进行建模,然后通过最优化求解算法,得到移动设备和边缘服务器之间的最优资源分配策略,从而达到资源利用最大化的目的。
同时,为了实现该方法,我们还设计了一种移动边缘计算资源优化装置,该装置可以有效地实现移动设备和边缘服务器之间的资源分配和优化。
该方法和装置的实验结果表明,相比于传统的资源分配方法,我们的方法和装置可以显著提高移动边缘计算中的资源利用效率,从而为移动边缘计算场景的应用提供了更加高效的资源支持。
- 1 -。
合作博弈 位置值法
合作博弈位置值法英文回答:Position Value in Cooperative Game Theory.In cooperative game theory, the position value is a solution concept that assigns a value to each player in a game based on their individual power. It is calculated by finding the maximum amount that a player can guarantee themselves, regardless of the actions of the other players.The position value is a powerful solution concept because it is able to capture the strategic interactions between players. It can be used to predict the outcomes of games and to design mechanisms for allocating resources fairly.There are a number of different ways to calculate the position value. One common method is to use the nucleolus. The nucleolus is a point in the core of the game that isboth efficient and fair. It can be found by solving a system of linear equations.Another method for calculating the position value is to use the Shapley value. The Shapley value is a solution concept that assigns a value to each player based on their marginal contribution to the coalition. It can be calculated by averaging the player's payoff over all possible coalitions.The position value is a useful tool for analyzing cooperative games. It can be used to predict the outcomes of games, to design mechanisms for allocating resources fairly, and to understand the strategic interactions between players.中文回答:合作博弈中的位置值。
一种基于博弈论的移动边缘计算任务卸载和资源调度方法[发明专利]
![一种基于博弈论的移动边缘计算任务卸载和资源调度方法[发明专利]](https://img.taocdn.com/s3/m/25cbfc4b24c52cc58bd63186bceb19e8b8f6ec88.png)
专利名称:一种基于博弈论的移动边缘计算任务卸载和资源调度方法
专利类型:发明专利
发明人:王岩,张重阳,朱世敏
申请号:CN202010325530.9
申请日:20200423
公开号:CN113553165B
公开日:
20220517
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于博弈论的移动边缘计算任务卸载和资源调度方法,该方法以移动边缘计算服务器的能耗及用户延迟联合最小化为目标,将用户任务卸载及资源调度问题建模为特定的优化问题,构建具有不同任务卸载优先级的基于多用户任务卸载计算系统,以多用户任务卸载到一个边缘基站建立迁移模型。
在特定的优化问题中,基于博弈论求解传输速率及成本系数为约束条件,以最小化服务器能耗为最终目标设计任务卸载方法。
该方法能有效均衡用户及系统的利益,为在移动边缘计算系统中实施任务卸载提供保证。
申请人:东北大学秦皇岛分校
地址:066004 河北省秦皇岛市经济技术开发区泰山路143号
国籍:CN
更多信息请下载全文后查看。
移动台高速运动时的定位跟踪算法研究
移动台高速运动时的定位跟踪算法在多种场景下均表现出良好的性能和稳定性。 算法在处理复杂环境和动态变化时具有较高的鲁棒性和适应性。 通过实验验证,该算法在定位精度和跟踪速度方面均优于传统算法。 未来研究方向包括优化算法性能、降低计算复杂度以及拓展应用场景等。
算法优化:进一步 改进定位跟踪算法, 提高精度和稳定性
实验设备:高性能 计算机、数据采集 卡、传感器等
实验软件:定位跟 踪算法软件、数据 处理软件等
实验场地:室外开 阔场地或室内模拟 场地
实验过程:设备安 装与调试、数据采 集与分析、算法实 现与优化等
数据来源:移动台高速运动时的定位跟踪算法实验数据 数据采集方法:采用高精度传感器和测量设备进行数据采集 数据处理方式:对采集到的数据进行预处理、分析和处理,提取有用信息 数据处理工具:采用专业软件和工具进行数据处理和分析
基于非测距的定位算法:利用移动台与基站之间的信号传播特性,通过分析信号的到达时间、 到达时间差等参数,推算出移动台的位置。
基于多天线的定位算法:利用多天线接收信号的相位差、幅度差等信息,确定移动台的位置。
基于混合的定位算法:结合多种定位技术,以提高定位精度和可靠性。
无人机飞行控制 智能交通系统 物流配送跟踪 移动机器人导航
多传感器融合:研究如 何将不同传感器数据融 合到定位跟踪算法中, 以提高整体性能
实时性研究:针对 移动台高速运动的 特点,研究如何提 高算法的实时性
智能化发展:结合人工 智能、机器学习等技术 ,实现自适应、自学习 的定位跟踪算法
汇报人:XX
实验数据:详细记录了移动台在不同速度下的定位跟踪数据 结果展示:通过图表、曲线等形式展示了实验结果 分析方法:采用了统计分析、趋势分析等方法对实验结果进行分析
移动目标跟踪算法研究及仿真【修改】

摘 要
移动目标检测是应用视觉研究领域的一个重要课题, 在视觉领域有着广泛的 应用。由于光照变化、背景干扰、阴影、摄像头的抖动以及运动目标之间遮挡等 现象的存在, 给运动目标的正确检测带来了极大的挑战。该课题将在总结和分析 现有运动目标检测与跟踪方法的基础上,研究一些新的移动目标的检测方法。 数字图象处理和计算机视觉是近年来发展十分迅速的研究领域, 目前正广泛 地应用于民用及军用等许多方面。 基于视频的运动目标检测与跟踪技术是计算机 视觉的主要研究方向之一。 目标检测与跟踪主要针对图像序列中的运动目标进行 检测、提取、识别和跟踪,获得运动目标的运动参数,如位置、速度、加速度等, 以及运动轨迹, 以实现对运动目标的行为理解,从而为完成更高一级的任务做准 备。目标跟踪有着广泛的应用前景,包括如下应用方面:智能监控、运动分析和 虚拟现实等。 本课题将在分析国内外研究工作的基础上, 研究移动目标检测和跟踪算法的 设计方法, 在总结和分析现有运动目标检测与跟踪方法的基础上,重点研究卡尔 曼滤波目标跟踪算法。在算法研究的基础上,将基于 MATLAB 仿真平台并采用卡 尔曼滤波算法对样本视频序列进行目标跟踪。 本课题主要围绕运动首帧目标检测和基于卡尔曼滤波的后续帧目标跟踪两 个方面展开研究。 首帧目标检测方面,研究了静态背景下常用的运动目标检测算 法,如常用的相邻帧差法、光流法、背景消减法,分析比较各种方法的优缺点, 并重点研究背景消减法。 基于卡尔曼滤波的后续帧目标跟踪方面, 介绍运动目标检测方法的分类及几 种常用跟踪方法,并进行归纳总结,比较各种方法的优缺点以及适用场合,并实 现卡尔曼滤波目标跟踪算法。
3 移动目标的检测算法研究.....................................................................................................10
基于SVM的WSN移动节点定位算法
基于SVM的WSN移动节点定位算法汤文华;傅明【期刊名称】《计算机工程》【年(卷),期】2012(038)022【摘要】Aiming at the problem of the prevailing higher error rate for the existing mobile sensor network localization, this paper presents a new network localization algorithm based on vector machine technology. This algorithm builds the relationship between the node hop-vector and the location by the vector machine technology and the nodes filter the values which can not accord with demands. The nodes hold the sample point set of their original trajectories, calculate and correct their orientation by Newton interpolation method to upgrade their sample point set, and determines their location coordinates by vector machines to achieve the predicted localization of the nodes. Simulation experimental results show that new algorithm has a lower error rate when compared with other algorithms and still keeps a relatively low error rate especially in the case of less anchor nodes and faster movement speed.%针对现有移动传感器网络定位存在错误率较高的问题,提出一种基于向量机技术的网络定位算法.该算法通过向量机技术建立节点测量向量与其位置的关系,节点根据新观察到的信息过滤掉不符合要求的取值范围.使节点持有其之前的运动轨迹样本点集,通过牛顿插值的方法计算其位置方向并更新节点样本点集,样本点通过向量机计算和纠正其坐标位置,从而实现节点的预测定位.仿真实验结果表明,与传统算法相比,该算法在锚节点较少、节点运动速度较快的情况下能保持较低的定位错误率.【总页数】5页(P76-79,83)【作者】汤文华;傅明【作者单位】长沙理工大学计算机与通信工程学院,长沙410114;长沙理工大学计算机与通信工程学院,长沙410114【正文语种】中文【中图分类】TP393【相关文献】1.WSN中一种基于RSSI的移动节点改进定位算法 [J], 黄海辉;李龙连2.WSN中改进的MCB移动节点定位算法 [J], 陆颖3.基于WSN的移动节点路径规划算法 [J], 满存金;杜庆治;黄冰倩4.基于RSSI和LSSVR的WSN移动节点三维定位系统 [J], 张烈平;吴俊康;王政忠;杨振宇5.WSN中的基于渔夫捕鱼的向量机的移动节点定位的研究 [J], 顾庆传因版权原因,仅展示原文概要,查看原文内容请购买。
基于Processing的移动物体追踪定位

作者: 张雯;白文乐;李浩进
作者机构: 北方工业大学电子信息工程学院
出版物刊名: 科学中国人
年卷期: 2016年 第11X期
主题词: 实时监控;移动物体;追踪定位;背景相减
摘要:本文主要介绍了利用Processing互动媒体制作软件结合摄像头、实现了一种对于移动物体追踪定位的方法,系统通过摄像头监控前方区域,设计人机交互界面,实时显示摄像头采集到的图像,在Processing中根据彩色图像RGB分量值的变化通过背景相减法来追踪物体,并且通过确定该物体在摄像头区域中的坐标,实现对移动物体的追踪定位。
轨道追逃博弈算法
轨道追逃博弈算法简介轨道追逃博弈算法是一种应用于追逃场景的算法,旨在通过优化策略来帮助捕捉者或逃亡者在有限的时间内达到最佳效果。
该算法可以应用于多个领域,如电子游戏、机器人导航和安全监控等。
背景在现实生活中,警察追捕罪犯、军队进行战术行动等都需要考虑到双方的行动与反应。
轨道追逃博弈算法就是针对这样的场景而设计的一种优化策略。
它通过建立数学模型和运用博弈论原理,分析双方的策略选择,并找到最佳行动方案。
原理轨道追逃博弈算法基于博弈论中的零和博弈模型,即一方得利必然导致另一方受损。
在这个模型中,捕捉者和逃亡者被认为是两个相互竞争的玩家,他们根据自身目标和对手的行动来选择最佳策略。
1. 状态空间建模首先,我们需要对轨道追逃场景进行建模。
我们可以将整个场景看作一个状态空间,其中包含了捕捉者和逃亡者的所有可能位置。
这个状态空间可以用一个图形表示,每个节点代表一个可能的位置。
2. 行动选择在轨道追逃博弈中,捕捉者和逃亡者需要根据当前的状态选择最佳行动。
他们可以选择移动到相邻的节点或停留在原地。
为了确定最佳行动,我们需要定义一些评估指标,如距离、速度、视野范围等。
3. 收益计算收益计算是轨道追逃博弈中非常重要的一步。
它基于双方的行动选择和当前状态来计算各自的收益。
收益可以是正数(表示获利)或负数(表示损失),并且双方的收益之和为零。
4. 策略优化最后,通过策略优化算法来确定最佳行动策略。
常见的策略优化算法包括极小极大算法(Minimax)、Alpha-Beta剪枝算法等。
这些算法能够帮助找到使自己收益最大化且对手收益最小化的策略。
应用场景轨道追逃博弈算法可以应用于多个领域,以下是一些常见的应用场景:1. 电子游戏在电子游戏中,轨道追逃博弈算法可以用来设计敌人的智能行为。
通过分析玩家的行动和当前状态,敌人可以选择最佳策略来增加游戏的难度和趣味性。
2. 机器人导航在机器人导航领域,轨道追逃博弈算法可以帮助机器人避开障碍物或优化路径选择。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HT H -Q GTG + I )-1Q Sk = (Q k k k k k
T T
*
(22)
T
*
H + I ) ³ 0 以及 (I -G Q 定理:如果 (HQ SkGk , Kk = ASkH k k kGk ) ³ 0 ,那么 Lk = A
一种基于博弈论的移动位置跟踪算法1
田玉昆,曾凡仔,罗娟,孙正章,罗正正
湖南大学计算机与通信学院,长沙(410012)
E-mail: yukun0820@
摘 要:移动定位问题受到业界,学术界的广泛关注。多径、多址干扰和非视距(NLOS)问 题是影响定位精度的主要问题,尤其是 NLOS 问题。有不少文献研究如何降低非视距传输所 造成的误差,但是定位精度仍然不够精确,为了提高定位精度,更有效地降低 NLOS 误 差 , 将定位嵌入到机器学习框架内, 本文提出了一种两步位置跟踪算法, 首先使用支撑向量回归 得到节点位置的最初估计。然后基于博弈论实现节点的位置跟踪,从而降低位置跟踪误差。 实验表明此方法能有效地降低 NLOS 误差,提高定位的精度。 关键词:定位;机器学习;NLOS;支持向量回归;博弈论 中图分类号:TP39
满足鞍点均衡。定理证明参见参考文献[8,9]。 算法的实现: 1 给定线性系统:
T
x k +1 = Ax k + Bwk + dk yk = Hx k + nk
2 初始化
(23)
0 = 0 x = E(x xT ) Q 0 0 0
3 对于 k = 0,1,, ,重复下面计算: a 选择参数Gk b 计算如下状态估计 (24)
30m , 为连续的训练位置之间的距离。我们的实验用 Unconstrained Minimax filter 对
SVR 的估计值进行过滤平滑,并与 Unconstrained Kalman filter 方法进行了比较。由 SVR 方 法得到的估计作为输入,经 Unconstrained Minimax filter 和 Unconstrained Kalman filter 估计 的值如图 2 所示。
3. 移动跟踪
对于移动节点跟踪,需要对上节的位置估计进行平滑,假定每隔 DT 秒观测一次,在 k DT 状态与观测等式表示为:
x k¢+1 = A¢ x k¢ + Ouk + Bwk + dk yk¢ = H ¢x k¢ + nk
(7)
¢ 其中 xk
¢k,x2 ¢k,x3 ¢k,x4 ¢k ]T ,前两个分量表示节点的二维状态坐标,后两个分量表示 =[x1
- 1 -
g(×) 为代价函数,其具体表示如下:
ì f (m) - p -e if f (m) - p ³ e ï g(f (m) - p) = ï í ï 0 otherwise ï ï î
通过 Lagrane 法,(2)式中的最优化问题可表示其的对偶问题[5],即:
估计误差定位为:
k ek = x k - x
估计误差的动态系统(即随时间的演化)可表示为
(11)
e0 = x 0 ek +1 = (A - K k H + LkGk )ek + Bwk + Lk nk - K k nk ek = e1,k - e2,k
它们的随时间的演化分别为: (12) 由于对手可以通过任意的增加 Lk 来增加 ek ,因此将误差 ek 分解为两个部分,即 (13)
(9) (10)
- 2 -
k 是 博 弈 对 手 生 成 的 噪 声 , 对 手 目 的 就 是 最 大 化 估 计 误 差 , 我 们 假 定 k ) + nk ) ,其中 Lk 是需要求解的增益, Gk 为根据先验知识给定的矩阵, dk = Lk (Gk (x k - x nk 为噪声序列,且与 nk , wk 互不相关。
1. 引 言
目前移动定位受到业界,学术界的广泛关注,如果能够提供精确的位置信息,则不同的 应用如智能交通,位置感知结算等将才有可能。移动定位技术包括到达时间(TOA),到达时 间差(TDOA),到达角度(AOA),信号强度(SS)。多经,非视距传输,多址干扰是定位误差的 主要来源,特别是非视距传输,这给定位技术提出了挑战。目前,有不少文献[1-3]研究如何 降低非视距传输所造成的误差,但是定位精度仍然不够精确,为了提高定位精度,将定位嵌 入到机器学习框架内。也就是说,假定无线电信号特征如 TOA、SS 等与节点位置坐标存在 一定的关系,通过实际测量不同位置(坐标已知)的无线电信号特征,然后通过机器学习的方 法估计无线电信号特征与节点位置坐标的关系, 这种方法能够显著降低非视距传输对定位误 差的不良影响。 本文提出了一种两步位置跟踪算法,首先使用支撑向量回归 [6]得到节点位置的最初估 计。然后基于博弈论实现节点的位置跟踪,即以支撑向量回归的位置估计作为观测,通过博 弈论实现位置估计平滑,从而降低位置跟踪误差。 论文的安排如下: 第二节用于移动节点位置估计的支撑向量回归算法, 第三节为基于博 弈论的节点位置跟踪算法,然后是实验结果,最后给出结论。
2. 基于核学习的位置估计
给定训练集Tr = {(m1, p1 ), (m2 , p2 ), , (ml , pl )} ,其中 m Î 表示移动节点相对于锚
n
节点射频特征向量,如到各锚节点的传输时延(TOA)或者信号强度(RSSI)等,而 p Î 表示 与射频特征相对应的移动节点的坐标(一维)。 为了估计射频特征向量与节点坐标的非线性关系,首先将特征 m 映射到高维特征空间, 则在高维特征空间的线性回归[4]可表示为:
T
k DT 时刻结点的二维速度, uk 表示二维加速度分量, wk 为白噪声序列, dk 为博弈对手
¢ = [y1¢k , y2 ¢k ] 表示二维观测,而矩阵 A',O 和 H'可表示为: (adversary)生成的噪声序列。 yk
é1 ê ê0 ê A¢ = ê ê0 ê ê0 ëê
T
0 DT 1 0 0 0 1 0
4. 仿真实验
这一部分对我们提出的算法进行了仿真,仿真平台是 matlab,在模拟中通过 matlab Support Vector Machines Toolbox[10]来执行 SVR。 在此实验中,在 600×600m 的区域内我们考虑了三个基站,坐标分别为:(187.5,150), (487.5,150)和(337.5,409.8).移动点从(50,305)以初速度为 20m/s 移动到(575,230), 如图 1 的实线所示.TOA 的采样速率为 20m/s。
p = f (m) = f(m)T w+b ,其中 f: n ® , w Î
支撑向量回归算子通过最小化如下结构风险估计权向量 w:
,
(1)
R (w ) =
1
å g ( f (m
i=1
n
i
) - pi ) +
1 2C
w
2
(2)
本文得到高等学校博士学科点专项科研基金项目(20060532024,20070532089)的资助。
- 4 -
600
500
400
y(m)
300
200
100
0
0
100
200
300 x(m)
400
500
600
图 1 模拟环境,移动点和 SVR 估计的轨迹
这此实验中用椭圆散射模型来产生 TOA 数据[11]。在这个模型中,假设在以基站和移动 点为焦点的椭圆中散射服从均匀分布进行散射。TOA 概率密度函数由下面的公式计算:
(17)
为求解上述问题,我们将目标函数重写简化,定义矩阵:
Fk = A - K k H + LkGk
定义如下差分等式:
(18)
Q0 = E (x 0x T 0 )
T Qk +1 = FkQk FkT + BBT + K k K k - Lk LT k
(19)
则目标函数(16)变为:
J (Kk , Lk ) = traceå wkQk
c(2c2 x2 D2 ) , p(x) 4ambm c2 x2 D2 0,
D x tm c else
其中,c 为光速,D 为 BS 与移动点之间的距离, tm 为区域的最大延时;也就是说由于 多径传播,在 tm s 时间内到达的信号才有效。因此椭圆的半轴参数 am 和 bm 被定义为:
am
ctm ; 2
bm
1 22 c tm D 2 ; 2
tm D / c ;
由此可以看出,当节点位置越稠密,NLOS 误差也就越小。 对于 SVR 技术,ker=’rbf’, 200 并且 -insensitive 损失函数中取 1 。 在模拟的第一阶段,如图 1 中实线显示了移动点的移动轨迹,其中 C=200, 1.5 和
1 éai*(pi -e)-ai*(pi +e)ù -2 m ax (ai* -ai )(aj* -aj )Ker(mi,mj ) åå * å ë û aa ,
(3)
n
n
n
i= 1
i= 1 j= 1
s.t.
å(a -a ) = 0,
i
* i
n
0 )
w=å (ai - ai* )f(mi )
e0 = x 0 e1,k +1 = (A - K k H + LkGk )e1,k + Bwk - K k nk e0 = x 0 e2,k +1 = (A - K k H + LkGk )e2,k - Lk nk