基于MATLAB的布尔莎模型七参数解算实现
基于MATLAB的七参数坐标系统转换问题分析(精)
基于 MATLAB 的七参数法坐标系统转换问题分析 1张鲜妮 21, ,王磊 21,1、中国矿业大学环境与测绘学院,江苏徐州 (2210082、江苏省资源环境信息工程重点实验室,江苏徐州 (221008E-mail:摘要:GPS 测量的坐标是基于 WGS-84坐标系下的,而我国实用的测量成果大多都是基于北京 54坐标系下的。
随着 GPS 测量技术的广泛使用,由 WGS-84坐标向北京 54坐标系下坐标的转换问题一直是一个可探讨的问题, 坐标系统转换的现有模型很多, 但常用的还是经典的七参数转换模型。
随着不断的实践研究, 发现七参数在进行坐标系统转换时有一定的局限性。
本文采用 MATLAB 语言编写了七参数法坐标系统转换程序,并对七参数坐标系统转换的若干问题进行了分析讨论。
分析结果表明, 小区域范围内用正常高代替大地高对坐标转换精度影响很小; 公共点分布情况对坐标转换精度影响显著; 合适的公共点密度有利于提高坐标转换精度。
关键词:七参数法;坐标系统; MATLAB ;转换问题1. 引言随着 GPS 空间定位技术的发展, GPS 技术以其快速、精确、全天候在测量中的应用变的越来越广泛, GPS 成为建立基础控制网的首选手段 ]1[,由于 GPS 系统采用的是 WGS-84坐标系, 是一种地心坐标系, 而我国目前常用的两个坐标系 1954年北京坐标系 (以下称 BJ54 和 1980年国家大地坐标系,是一种参心坐标系,采用克拉所夫斯基椭球为参考椭球,并采用高斯克吕格投影方式进行投影, 我国的国土测量成果和在进行工程施工时大都是基于这两个坐标系下的。
所以在利用 GPS 技术进行测量过程中必然存在由 WGS-84坐标向北京 54坐标系下的转换问题。
现有的转换模型已经成熟,归纳起来主要有布尔莎 -沃尔夫模型(七参数法、莫洛登斯基 -巴代卡斯模型和范士模型 ]2[。
本文主要分析讨论是基于七参数转换模型, 分析工具是MATLAB 软件。
七参数、四参数的坐标转换与应用
坐标转换的应用浙江省地质调查院 浙江 萧山 王雪春 fidream@王解先1,2,施一民31 同济大学测量系,上海(200092)2 现代工程测量国家测绘局重点实验室,上海(200092)摘要:GPS定位技术已经被广泛应用,但由于GPS观测量是基于以地球质心为原点的空间直角坐标系,而对于采用 5 4北京坐标或者其他地方坐标而言,就需要解决如何将WGS84坐标转换为 5 4北京坐标或者其他地方坐标的转换问题。
关键词:换带计算,坐标转换,七参数,四参数,Coord前言我们在测绘,地质工作中,常常会遇到不同坐标系统间,坐标转换的问题。
目前国内常见的转换有以下3种:1,大地坐标(BLH)对平面直角坐标(XYZ)的转换;2,北京54对西安80及WGS84坐标系的相互转换;3,北京54对地方坐标的转换。
常用的方法有三参数法、四参数法和七参数法。
本文结合坐标转换软件COORD对上述三种情况和转换方法做详细的描述!1,大地坐标(BLH)对平面直角坐标(XYZ)的转换该类型的转换常用于坐标换带计算!对于这种转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。
椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。
对于中央子午线的确定有两种方法,一是根据带号与中央子午线经度的公式(3度带 L=3n, 6度带L=6n-3)计算。
在3度带中是取平面直角坐标系中Y坐标的前两位乘以3,即可得到对应的中央子午线的经度。
如x=3321006m ,y=40425785m,则中央子午线的经度L=40*3=120度。
同样在6度带中有坐标x=3312029 y= 20689300则计算中央子午线的经度L=20*6-3 =117度。
另一种方法是根据大地坐标经度,如已知该点的经度为119.1254因其处于3度带的40带(118.5~121.5度)则中央子午线为120度。
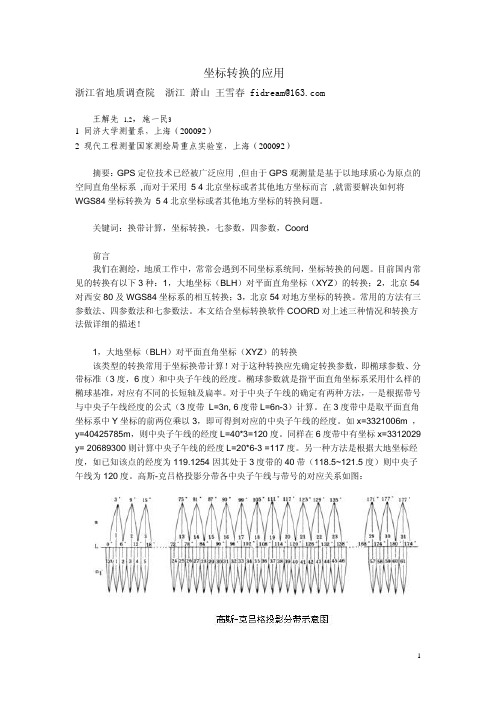
高斯-克吕格投影分带各中央子午线与带号的对应关系如图:确定参数之后,可以用软件进行转换,以下以坐标转换软件COORD GM说明如何将一组6度带的XYZ坐标转化为当前坐标系统下的(BLH)及3度带的(XYZ)坐标。
matlab布尔莎七参数

matlab布尔莎七参数MATLAB布尔莎七参数是一种用于测量地球形状、尺寸和定位的方法。
该参数根据地球椭球体的大小和形状,以及大地水准面的高度确定了三维坐标系的原点和方向。
在本文中,我们将详细介绍MATLAB布尔莎七参数的步骤和应用。
步骤1:数据收集MATLAB布尔莎七参数需要收集的数据包括:- GPS卫星的升交点(ASC)和卫星轨道倾角(INC);- 观测点的经纬度信息;- 作为参考基准的大地水准面高度数据。
步骤2:计算天球坐标系在天球坐标系中,原点是地球的质心,与地球椭球体重心在同一位置。
平均赤道面和平均黄道面定位在天球中,在这些面上定义了一个圆柱坐标系。
利用天球坐标系中的位置向量、速度向量和加速度向量,可以确定一个时间的GPS卫星的升交点和卫星轨道倾角。
步骤3:计算地球椭球面坐标系地球椭球面坐标系有一个中心坐标系,位于地球椭球面上。
该坐标系固定在地球上,其原点是地球质心。
在该坐标系下,地球的形状近似于椭球体。
利用地球椭球面坐标系可以确定观测点的经纬度和高度,并确定地球椭球体的大小和形状。
步骤4:计算大地水准面坐标系大地水准面是一种参考平面,用于确定地球上任何点的高度。
该坐标系固定于大地水准面上,其原点通常位于每个国家的主要测量站。
在该坐标系下,通过高程测量可以确定地球上任何点的高度。
步骤5:通过MATLAB编写算法在收集数据并计算出天球坐标系、地球椭球面坐标系和大地水准面坐标系之后,我们可以通过MATLAB编写算法来计算布尔莎七参数。
算法的核心包括利用观测点和GPS卫星的排列来确定参数。
步骤6:参数应用MATLAB布尔莎七参数可以通过各种应用来使用。
其中包括全球定位系统(GPS)、地图和地理信息系统(GIS)和空间任务计划系统(STPS)。
在GPS中,该参数有助于确定GPS系统经过的距离和方向,从而帮助用户找到其目的地。
在GIS中,该参数可用于确定各种地图和卫星图像之间的连接和位置。
在STPS中,该参数可以帮助计算航天器行驶的轨迹和方向。
布尔莎七参数据快速计算工具

布尔莎七参数据快速计算工具布尔莎七参数快速计算工具--中国电力建设集团西北勘测设计研究院有限公司尹业彪本程序开发背景:在工程施工放样或需要计算七个参数的场合,通常是将WGS84计算到目标坐标系(如1980年西安坐标系和1954年北京坐标系)进行RTK测量。
常用的方式:1、通过翻查该工程静态平差报告,寻求七参数。
该方法最简单,但不是每次都有这种报告。
2.通过克山、坐标等将WGS84平面坐标或大地坐标转换为空间直角坐标;与目标坐标对应的同名点也需要进行相应转换。
最后将两组坐标系转换为空间直角坐标系,计算两组坐标系之间的转换参数。
第二种方法目前无论使用哪一种软件,要么经好几道工序转换,要么要逐个输入,挺麻烦!鉴于常用又麻烦,本软件就此诞生。
希望该软件能够辅助用户轻松计算不同坐标体系之间的七参数。
使用方法:1.存储格式:文本文件(txt)格式2、储存顺序:共7列,分别为点名,源坐标值(3列,一般是wgs84^_^),目标坐标值(3列),可以按空格或制表符划分,每组数据占用一行。
存储格式与克山7号参数计算文件相同。
3、格式要求,源坐标系坐标类型与目标坐标系类型,不限制。
可以分别组合,空间直角坐坐标系(XYZ)、大地坐标系(BLH)和高斯平面+高程(XYH),任意组合。
转换本质:不同坐标系只是表现类型不同,其本质仍是在空间直角坐标系下进行七参求算。
不同类型坐标系均通过相应转换,先求算出对应坐标系下的空间直角坐标,最终计算七参数。
成果形式:将结果输出到与起始数据文件相同的文件夹中,然后单击“附加”7“参数计算”。
第一部分内容共10列,前7列与原文件内容相同,第8/9/10三列,分别是经七参数据计算后,转换残差,以米为单位。
残差小,说明两套系统兼容性好;反之,则兼容性不好,或者两套坐标中,有错误输入值。
第二部分为七参数部分,请注意单位!最后一行的单位重量均方误差由第一部分的最后三列计算得出。
玩得愉快作者2022年7月11日。
使用MATLAB进行参数估计与模型选择的方法

使用MATLAB进行参数估计与模型选择的方法在MATLAB中,有多种方法可以进行参数估计与模型选择,其中包括最小二乘法、最大似然估计、贝叶斯统计和交叉验证。
最小二乘法:最小二乘法是一种常见的参数估计方法,适用于线性模型。
在MATLAB中,可以使用`polyfit`函数进行最小二乘法估计。
该函数采用原始数据点的坐标和多项式的次数作为输入,并返回多项式系数。
```matlabx=[1,2,3,4,5];y=[1,4,9,14,24];degree = 2;coefficients = polyfit(x, y, degree);```最大似然估计:最大似然估计是一种参数估计方法,通过最大化观测数据的可能性来估计参数。
在MATLAB中,可以使用`mle`函数进行最大似然估计。
该函数要求用户提供一个自定义的似然函数,该函数将根据参数估计观测数据的可能性。
```matlabx=[1,2,3,4,5];startingVals = [0, 1];estimates = mle(y, 'pdf', likelihoodFunc, 'start', startingVals);```贝叶斯统计:贝叶斯统计是一种基于概率的模型选择方法,通过计算后验概率来进行模型选择和参数估计。
在MATLAB中,可以使用`bayeslm`函数进行贝叶斯线性回归的模型选择。
该函数采用原始数据点的坐标和响应变量作为输入,并返回具有最高后验概率的线性回归模型。
```matlabx=[1,2,3,4,5];y=[1,4,9,14,24];model = bayeslm(x, y);```交叉验证:交叉验证是一种常用的模型选择方法,通过将数据集分成训练集和测试集来评估模型的性能。
在MATLAB中,可以使用`cvpartition`函数将数据集分成训练集和测试集。
然后,可以使用交叉验证来选择模型,并使用测试集进行性能评估。
坐标转换模型

坐标转换模型1.空间直角坐标系间的转换模型(七参数模型)①公式(布尔莎模型):②分析:(1)将O-XYZ中的长度单位缩放l+m倍,使其与O'-X'Y'Z'的长度单位一致;(2)从X反向看向原点O,以O为旋转点,让O-XYZ绕X轴顺时针旋转Wx角,使经过旋转后的Y轴与O'-X'Y'Z’平面平行;(3)从Y反向看向原点O,以O为旋转点,让O-XYZ绕Y轴顺时针旋转Wy角,使经过旋转后的X轴与O'-X'Y'Z'平面平行。
显然,此时Z轴也与Z'轴平行; (4)从Z反向看向原点O,以O点为旋转点,O-XYZ绕Z轴顺时针旋转Wz角,使经过旋转后的X轴与X’轴平行。
显然,此时O-XYZ的三个坐标轴己与O'-X'Y'Z’中相应的坐标轴平行;原坐标为O-XYZ,转换到新坐标O-X’Y’Z’.(两坐标系都为空间直角坐标系)其中(dX dY dZ)为坐标原点的平移参数,即将坐标O-XYZ的原点分别沿三个坐标轴平移-dX,-dY,-dZ,使原坐标轴与O-X’Y’Z’的点重合。
m为尺度参数,(w1 w2 w3)分别为坐标轴的旋转参量(角度),构成的旋转矩阵分别为:分别将R1 R2 R3代入上式,可得:当旋转角度w1 w2 w3很小时(<=10),cos(w)=1,sin(w)=0;在误差允许范围内可以将模型简化为:(同样七参数模型)四参数模型是在七参数模型的特例,没有考虑坐标轴的旋转量,只考虑坐标轴的平移。
总结:类似布尔莎模型(以坐标原点为参考点),还有莫洛金斯基坐标模型(以目标点为变换中心)、武测转换模型和范士转换模型(以控制网参考点的站心地平坐标系的三个坐标轴为旋转轴),这些坐标转换模型很容易实现相关坐标在不同坐标系的转换,但是参考位置的偏移向量的相关参数,在实际运用中这些参量是很难测定的,并且受地球重力等物理因素的影响,两个坐标系统即使经过相似变换,仍可能存在较大的残差,所以这些模型适用于简单且规则模型中。
七参数布尔莎模型公式

七参数布尔莎模型公式
1什么是七参数布尔莎模型
七参数布尔莎模型是一种空间表示技术,它将空间抽象为七个参数,并利用它们来模拟空间几何以分析实体在三维立体空间中的位置和位姿。
该模型是为了代表和模拟复杂几何关系而设计的,它建立在空间几何的基础上,使物体之间的变换或变化可以被清楚而准确地表达出来。
在计算机视觉领域,七参数布尔莎模型公式被广泛应用用于分析并估计实体在相机或三维空间中的运动和位置。
2七参数布尔莎模型公式
七参数布尔莎模型设计的七个参数有:旋转偏移(Rx,Ry,Rz),位置偏移(Tx,Ty,Tz)和全局缩放因子(sc)。
七参数布尔莎模型的坐标变换的公式如下:
P'=sc*R*P+T
其中sc是全局缩放因子,R是三阶单位旋转矩阵,P是3维坐标变换前的向量,T是三维偏移向量。
也就是说,七参数布尔莎模型将实体分解为三部分,即绕轴旋转、任意轴平移和全局缩放,并通过组合这三部分来进行变换。
3应用
七参数布尔莎模型在计算机视觉领域有广泛的应用,它可以用来分析实体在三维空间中的旋转偏移、位移偏移以及全局缩放比例。
它
可以应用于多种视觉任务,如对象检测、目标跟踪、图像校准和拾取机器人等。
七参数布尔莎模型还可以用于机器人抓取、球路规划以及机械臂的空间分析等机器人方面的应用。
在工业制造、零件定位以及机器人视觉定位中,应用七参数布尔莎模型可以高效地确定各个物体之间的关系,并准确估计物体在三维空间中的每一维位置和位姿。
布尔莎七参数坐标转换模型及其编程实现-概述说明以及解释

布尔莎七参数坐标转换模型及其编程实现-概述说明以及解释1.引言1.1 概述布尔莎七参数坐标转换模型是一种用于将不同坐标系下的地理位置进行转换的数学模型。
随着社会的发展和科技的进步,坐标转换在地理信息系统(GIS)、导航系统、测绘工程等领域中变得越来越重要。
本文通过介绍布尔莎七参数坐标转换模型及其编程实现,旨在帮助读者更好地理解和掌握这一模型的原理和实践应用。
文章从概述、正文和结论三个主要部分展开,以便全面而系统地介绍该模型。
在本文的概述部分,我们将首先介绍该模型的概述,包括其基本原理和应用范围。
布尔莎七参数坐标转换模型是一种采用七个参数对坐标进行转换的方法,它可以有效地解决不同坐标系之间坐标转换的问题。
通过了解该模型的基本原理和特点,读者将能够更好地理解接下来的内容。
接着,我们将说明文章的结构安排,以帮助读者更好地理解整篇文章的内容和逻辑。
文章结构包括主要章节的划分和各个章节的内容概述。
通过对文章结构的介绍,读者将能够对整篇文章的内容有一个清晰的把握。
最后,在本部分的目的部分,我们将明确本文的写作目的。
本文的目的是介绍布尔莎七参数坐标转换模型及其编程实现,旨在帮助读者深入了解该模型的原理和方法,并能够通过编程实现来解决实际问题。
通过本文的阅读,读者将能够在实践中灵活应用该模型,并能够为相关领域的研究和应用做出贡献。
综上所述,本文的概述部分对布尔莎七参数坐标转换模型及其编程实现进行了简要介绍。
通过本文的阅读,读者将能够更好地了解该模型的原理和应用,并能够通过编程实现来解决坐标转换问题。
接下来,我们将在正文部分详细介绍布尔莎七参数坐标转换模型及其编程实现的内容。
1.2文章结构1.2 文章结构本文主要介绍了布尔莎七参数坐标转换模型及其编程实现。
文章包括引言、正文和结论三个部分。
在引言部分,首先对布尔莎七参数坐标转换模型进行了概述,介绍了该模型在地理信息系统领域中的重要性和应用场景。
然后,阐述了文章的结构和目的,为读者提供了整篇文章的概览。
关于布尔莎(BURSA)模型坐标转换说明

关于布尔莎(BURSA)模型坐标转换说明标签:坐标高斯转换经纬度bursa2010-05-07 15:13阅读(522)评论(0)布尔莎(Bursa)模型,俗你七参数转换法,是用来转换两个不同椭球之间相应点坐标,因为每个点有坐标和高程,所以最少有三个点才能解算,多余的点要用最小二法求最或然值,不同的软件计算结果略有差别,只要转换模型正确,都是可行的.通过本次矿业权核查工作,因为要涉及到探矿权转换,从54系经纬度转到80系经纬度,通常分以下几步走,首先把54系的经纬度转成54系高斯平面坐标,再把54系高斯平面坐标转成54系空间直角坐标,通过七参数转成80系空间直角坐标,再转成80系高斯平面坐标,最后再转成80系经纬度.为了计算方便,<空间数据处理系统3.2版>免费版提供了直接从54系经纬度转到80系经纬度,但还有个别单位不会用,用其他软件转换,走了不少弯路,耽误了很多时间,而且结果也转错了.[图示如下]正确的使用方法:打开<空间数据处理系统3.2版>免费版,找到[转换]菜单下的[不同椭球坐标转换],选择原坐标系统和新坐标系统,导入公用点文件或直接双击表格内空白处,输入公共点坐标,等所有公共点输入完毕,设置好中央子午线,单位为:度.分秒,点击[参数计算],在右边框内显示七参数计算结果,此时可以保存转换参数,下次再用不用重新计算,再选择计算类型,两边都选择大地坐标,注意下面标题会自动变化,然后在左边框内输入要转换点的经纬度,单位:度.分秒,点击[转换坐标],即显示新坐标系统下的经纬度.其他说明:1、七参数是两个椭球的转换参数,一旦求出转换参数,就不用再求了,可随意转换成经纬度或高斯平面坐标或空间直角坐标,都是一个点的不同表达形式,也就是说不管坐标类型是什么样式,都代表同一个点;2、不管转换前是6度带还是3度带成果,直接输入中央子午线即可,转换到那个带都可以,只需要改变新椭球中央子午线经度即可.不要求转换前后中央子午线完全一致,这给用户提供了很大方便,不需要再换带等操作.。
基于布尔莎模型的坐标转换算法

基于布尔莎模型的坐标转换算法作者:孔钰如来源:《科技风》2021年第04期摘要:随着我国空间技术的发展,我国建立了2000国家大地坐标系,但大多数的测量成果使用的是1980西安坐标系,而2000国家大地坐标系的精度优于1980西安坐标系,因此实际中常进行这两种坐标系的转换。
针对测量成果坐标系转换到2000国家大地坐标系的问题,采用了布尔莎模型进行坐标系转换,通过实例验证了布尔莎模型转换的可行性。
关键词:七参数;坐标转换;最小二乘法Abstract:With the development of space technology,China has set up the China Geodetic Coordinate System 2000,but most measurement results are still based on Xi'an 80 coordinate system.The CGCS2000 has higher precision than the Xi'an 80 coordinate system.Therefore,we oftencarry out the conversion of two coordinate systems in practice.In order to resolve the problems that happened in the process of conversion from coordinate system of the measurement result to the CGCS2000,we adopt the Bursa model coordinate conversion,of which the feasibility has been proved by examples.Key words:seven parameters;coordinate transformation;least squares method1 绪论我国先后建立了1954北京坐标系、1980西安坐标系和新1954年北京坐标系,这些坐标系为我国的测绘事业做出了重要的贡献[1]。
python实现布尔莎转换模型

python实现布尔莎转换模型1. 公式 布尔莎七参数的数学模型为 [X1,Y1,Z1]为待求坐标,[X2,Y2,Z2]为⽬标坐标系坐标。
顾及旋转⾓度都是⾮常⼩的,布尔莎七参数转换模型的数学模型可以简化为:这样有利于使⽤编程语⾔来求解。
由公式可知,必要观测条件数为 t=7, 所以⾄少需要3个已知点对。
设已知点对数为m,则多余观测数 r = 3*m - 7, 这在最终的精度评定中是有⽤的。
2. 核⼼问题 1. 由于是同等精度观测且相互独⽴,最终使⽤的权阵应该为单位矩阵 P(3m*3m), m为已知点对个数。
p = np.eye(n) # 单位权矩阵 3n * 3n 2. 程序实现时,所有的已知点对XYZ坐标都读⼊相应的列矩阵,系数阵B同样需要这样操作(V=BX-L)。
在numpy处理时可以表⽰为:1for i in range(vector_count):2 matrix_source.append(vector3d_list_source[i].X)3 matrix_source.append(vector3d_list_source[i].Y)4 matrix_source.append(vector3d_list_source[i].Z)5 matrix_dest.append(vector3d_list_dest[i].X)6 matrix_dest.append(vector3d_list_dest[i].Y)7 matrix_dest.append(vector3d_list_dest[i].Z)8 matrix_B.append([1, 0, 0, 0, -vector3d_list_source[i].Z, vector3d_list_source[i].Y, vector3d_list_source[i].X])9 matrix_B.append([0, 1, 0, vector3d_list_source[i].Z, 0, -vector3d_list_source[i].X, vector3d_list_source[i].Y])10 matrix_B.append([0, 0, 1, -vector3d_list_source[i].Y, vector3d_list_source[i].X, 0, vector3d_list_source[i].Z])11 matrix_source = np.array(matrix_source).reshape(1, -1).T12 matrix_dest = np.array(matrix_dest).reshape(1, -1).T13 matrix_B = np.array(matrix_B)14 L = matrix_dest - matrix_source 3. 参数矩阵值(列矩阵)X = np.dot(np.linalg.inv(np.dot(matrix_B.T, matrix_B)), np.dot(matrix_B.T, L)) 4. 误差⽅程V = np.dot(matrix_B, X) - L #误差⽅程 5. 精度评估standard_deviation = math.sqrt(np.dot(np.dot(V.T, p), V) / r) # 转换中误差 。
布尔莎七参数概念

布尔莎七参数概念布尔莎七参数概念是一个非常重要的测量概念,被广泛地应用于国际测绘、大地测量等领域。
下面,本文将分步骤地介绍这一概念。
第一步,讲解什么是布尔莎七参数概念。
布尔莎七参数概念,简称B7参数,是传统大地测量中,一种基本?外部定向参数的组合。
它能够将不同地理坐标系之间的空间位置互相转换,帮助我们确定不同坐标系之间的关系。
第二步,介绍B7参数的具体分量含义。
B7参数包含七个分量,分别是三个平移分量(dx, dy, dz),三个旋转分量(wx, wy, wz)和一个尺度分量(k)。
其中,平移分量表示不同坐标系之间的位置差别,旋转分量表示不同坐标系之间的方位差别,尺度分量则表示不同坐标系之间的尺寸差别。
第三步,讲解如何计算B7参数。
B7参数的计算需要借助于大地坐标系和空间直角坐标系之间的转换。
通常我们需要在参考点上建立起局部坐标系,然后在该点处进行大地测量,测得参考点的经纬度和高程等参数。
接着,我们需要将参考点的大地坐标系转换为空间直角坐标系,并建立坐标系之间的转换方程,实现不同坐标系之间的互相转换。
第四步,列举B7参数在实际测绘中的应用。
B7参数广泛应用于工程设计、建筑施工、地质勘探、精密制造等领域。
例如,在地震勘探中,B7参数可以通过全球卫星定位系统(GPS)来测量,帮助我们获取全球各地的地面变形情况;在地图制作中,B7参数可以帮助我们将不同国家和地区的地图统一到同一地理坐标系上,以实现数据的交叉对比和综合分析。
综上所述,布尔莎七参数概念是一种非常重要的测量概念,它可以帮助我们实现不同坐标系之间的互相转换,从而实现数据的集成处理和综合分析。
即便是在现代的卫星导航系统所提供的坐标系之间,B7参数仍然具有极其重要的应用价值。
基于 Matlab 的七参数坐标转换研究与实现

基于 Matlab 的七参数坐标转换研究与实现
李志伟;李克昭;赵磊杰
【期刊名称】《黑龙江工程学院学报(自然科学版)》
【年(卷),期】2016(030)002
【摘要】工程测量中,为了降低投影带来的变形过大问题,一般选择建立自己的独立坐标系统,不同坐标系之间的坐标转换成为迫切需要解决的问题。
利用M atlab7.0软件中线性最小二乘拟合函数求取布尔莎坐标转换模型中的七参数,通过设计软件计算得到转换后的坐标和若干点间距离,并与相似模拟实验中钢尺测量的实际距离进行比较,得出基于布尔莎七参数坐标转换满足实际工程应用要求。
【总页数】4页(P1-4)
【作者】李志伟;李克昭;赵磊杰
【作者单位】河南理工大学测绘与国土信息工程学院,河南焦作 454000;河南理工大学测绘与国土信息工程学院,河南焦作 454000; 北斗导航应用技术协同创新中心,河南郑州 450052;河南理工大学测绘与国土信息工程学院,河南焦作454000
【正文语种】中文
【中图分类】P226
【相关文献】
1.基于二维七参数转换模型的坐标转换参数的计算 [J], 冯里涛;邓云青
2.基于Visual Studio的七参数坐标转换模型研究及实现 [J], 王艳华;胡社荣;孙成
帅;赵晋斌
3.基于非迭代与迭代法联合估计的七参数坐标转换方法研究 [J], 谭骏祥;李少达;杨容浩
4.基于Matlab的七参数空间坐标转换研究与实现 [J], 刘平;段志强;谢超
5.三维七参数与二维七参数坐标转换的研究 [J], 王仲锋; 申景贇; 赵达
因版权原因,仅展示原文概要,查看原文内容请购买。
布尔莎七参数转换 c++
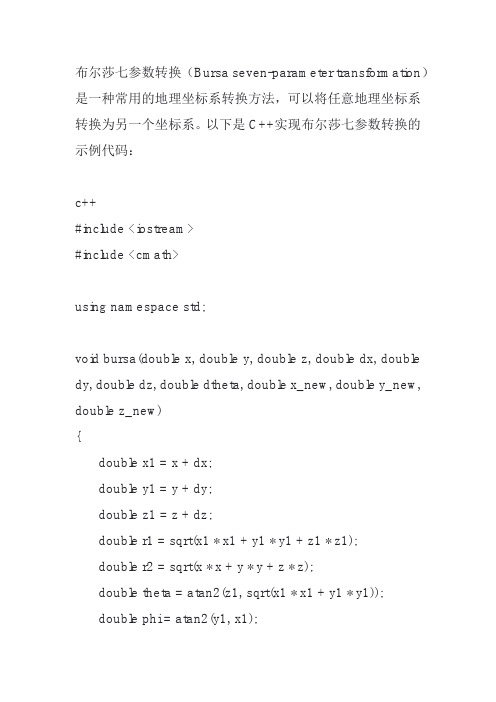
布尔莎七参数转换(Bursa seven-parameter transformation)是一种常用的地理坐标系转换方法,可以将任意地理坐标系转换为另一个坐标系。
以下是C++实现布尔莎七参数转换的示例代码:c++#include <iostream>#include <cmath>using namespace std;void bursa(double x, double y, double z, double dx, double dy, double dz, double dtheta, double x_new, double y_new, double z_new){double x1 = x + dx;double y1 = y + dy;double z1 = z + dz;double r1 = sqrt(x1 * x1 + y1 * y1 + z1 * z1);double r2 = sqrt(x * x + y * y + z * z);double theta = atan2(z1, sqrt(x1 * x1 + y1 * y1));double phi = atan2(y1, x1);double d_theta = theta - atan2(z, sqrt(x * x + y * y));double d_phi = phi - atan2(z1 / r1, sqrt(x1 * x1 + y1 * y1) / r1);double k = r2 / r1;double sin_d_theta = sin(d_theta);double cos_d_theta = cos(d_theta);double sin_d_phi = sin(d_phi);double cos_d_phi = cos(d_phi);double sin_theta = sin(theta);double cos_theta = cos(theta);double sin_phi = sin(phi);double cos_phi = cos(phi);double x_new_temp = k * (cos_theta * cos_phi * x1 + cos_theta * sin_phi * y1 - sin_theta * z1) + dx;double y_new_temp = k * (sin_theta * cos_phi * x1 + sin_theta * sin_phi * y1 + cos_theta * z1) + dy;double z_new_temp = k * (-sin_phi * x1 + cos_phi * y1) + dz;x_new = x_new_temp * cos(dtheta) - y_new_temp * sin(dtheta) + x;y_new = x_new_temp * sin(dtheta) + y_new_temp * cos(dtheta) + y;z_new = z_new_temp;}该函数接受输入参数x、y、z表示原坐标系下的坐标,dx、dy、dz表示原坐标系下的位移量,dtheta表示旋转角度,x_new、y。
MATLAB求解方程解析解和数值解
辽宁工程技术大学上机实验报告用MATLAB求解质点振动方程振动是日常生活和工程技术中常见的一种运动形式。
利用常系数线性微分方程的理论来讨论有关自由振动和强迫振动的相关问题。
利用MA TLAB数学软件大致可分四类情况:(1)无阻尼自由振动情况;(2)有阻尼自由振动;(3)无阻尼强迫振动;(4)有阻尼强迫振动求其数值解和解析解;MATLAB软件求解微分方程解析解的命令“dsolve()”求通解的命令格式:(’微分方程’,’自变量’)注:微分方程在输入时,一阶导数y’应输入Dy,y’’应输入D2y等,D应大写。
1,无阻尼自由振动情况:常见的数学摆的无阻尼微小振动方程代码如下:>> t=0:pi/50:2*pi;>> y=2*sin(3*t+2);>>plot(t,y,'b')2,有阻尼自由振动由无阻尼振动的通解可以看出,无阻尼振动是按照正弦规律运动的,摆动似乎可以无限期的进行下去,但事实上,空气从在阻力,在运动时,我们必须把空气阻力考虑在内,所以我们得到有阻尼摆动方程为:记u/m=2n,g/l=w^2,这里n,w是正常数,所以:y=dsolve('D2y+2*n*Dy+w^2*y=0','t'); (4.43)解得:y = C3*exp(-t*(n + ((n + w)*(n - w))^(1/2))) + C2*exp(-t*(n - ((n + w)*(n - w))^(1/2)))(1)小阻尼情形:n<w时,方程(4.43)的通解为:y=exp(-n*t)*(c1*cos(w1*t)+c2*sin(w1*t))和前面无阻尼的情形一样,可以把上式的通解改写为一下形式:y=A*exp(-n*t)*sin(w1*t+Q), (4.45)这里的A,Q为任意常数。
用matlab 操作得到:t=0:0.1:10;y=3*exp(-0.1*t).*sin(5*t+4);plot(t,y,'k-')如图:由(4.45)可见,摆动的运动不是周期的,振动的幅度随着时间的增加而不断减小。
最小二乘求解方法——以布尔沙七参数为例

最小二乘求解方法——以布尔沙七参数为例最小二乘求解方法——以布尔沙七参数为例—Walkinfo—地信网论坛测绘和GIS计算中经常要用到《最小二乘法》求解。
如坐标转换中的四参数、Bursa七参数,等等。
若用matlib求解则需要学习其语法等,若使用他人的程序则需要求证自变量和因变量的关系,若自己编写c/c++程序则颇费周折。
求人不如求己,在Walk脚本中提供了类似于matlib的矩阵运算功能。
以求解Bursa七参数为例,其方程如下:r1 + 0 + 0 + 0 + r5*z0 - r6*y0 + r7*x0 = x1 - x00 + r2 + 0 - r4*z0 + 0 + r6*x0 + r7*y0 = y1 - y00 + 0 + r3 + r4*y0 - r5*x0 + 0 + r7*z0 = z1 - z0式中,源srcC(x0,y0,z0), 目标tarC(x1,y1,z1),r1,r2,...,r7为七参数。
bool solve7X(array &srcC, array &tarC, array &X){int n=srcC.getSize();//组成系数方程矩阵 A*X=L:double A[3*n][7];double L[3*n][1];for (int ii=0, k=0; ii<n; ii++){double x=srcC[ii][0], y=srcC[ii][1], z=srcC[ii][2];A[k][0]=1.; A[k][1]=0.; A[k][2]=0.; A[k][3]=0.; A[k][4]=z; A[k][5]=-y; A[k][6]=x;L[k++][0]=tarC[ii][0] - x;A[k][0]=0.; A[k][1]=1.; A[k][2]=0.; A[k][3]=-z; A[k][4]=0.; A[k][5]=x; A[k][6]=y;L[k++][0]=tarC[ii][1] - y;A[k][0]=0.; A[k][1]=0.; A[k][2]=1.; A[k][3]=y; A[k][4]=-x; A[k][5]=0.; A[k][6]=z;L[k++][0]=tarC[ii][2] - z;}//按最小二乘法组成法方程: (A'*A)*X = (A'*L) -- A'为A的转置矩阵// 设: N=(A'*A), W=(A'*L) 法方程为 N*X=Warray At=A.mtTranspose(); // A'array N=At.mtMultiply(A); // (A'*A)array W, W0=At.mtMultiply(L); // (A'*L)for (ii=0; ii<W0.getSize(); ii++) W.add(W0[ii][0]);//高斯主元素消元法求Xint o1 = X.mtGauss(N,W);return (o1 == 1);}//加入自己的重合点坐标,运行void main(){//目标点坐标array tarC={// N, E, H{2457352.726, 524988.625, 0.},{2459025.942, 534157.249, 0.},{2460338.594, 529155.636, 0.}};//源点坐标array srcC={// N, E, H{2457426.677, 525103.512, 0.},{2459100.114, 534273.255, 0.},{2460412.919, 529271.031, 0.}};array X;if (solve7X(srcC, tarC, X))trace("\n最小二乘解 X = " + toString(X)+"\n");}运行结果:最小二乘解X = [7]{227.642618576805, -54.7105352482602, 0.0, 0.0, 0.0, 1.66072305203775e-6, -0.000122372906272742}。
布尔莎七参数模型原理

布尔莎七参数模型原理布尔莎七参数模型是一种用于地壳形变分析和大地测量中的数学模型,是由法国大地测量学家尤贝·布尔莎于1903年提出的。
该模型可以用来描述地壳的弹性形变和地震转瞬变形等现象,广泛应用于大地测量学、地震学以及地球物理学等领域。
布尔莎七参数模型假设地壳的形变是由七个不同的参数所控制,这七个参数分别是:三个平移参数(dx、dy和dz)、三个旋转参数(θx、θy和θz)以及一个比例参数 scale。
其中平移参数描述了地壳中的三维平移运动,旋转参数描述了地壳的旋转运动,比例参数则描述了地壳的伸缩变形。
在实际应用中,布尔莎七参数模型可以通过大地测量数据进行估计。
大地测量数据包括地球上的一系列控制点的坐标观测值,以及这些点的观测时间。
基于这些数据,可以建立一个误差最小化的数学模型,通过优化算法来估计出最佳的七个参数。
1.建立初始的平移旋转参数估计值。
初始值可以通过根据控制点的观测数据和测量方法进行简单的初步估计。
2.计算观测点在建立坐标系下的理论坐标。
根据初始的参数估计值,可以通过平移和旋转变换计算出每个观测点在建立坐标系下的理论坐标。
3.计算观测点的残差。
将观测点的观测值与理论坐标进行比较,计算出观测点的残差,即观测值与理论值之间的差异。
4.根据残差的大小,调整平移旋转参数的估计值。
通过最小二乘拟合或其他优化算法,调整参数的估计值,使得残差最小。
5.重复步骤3和步骤4,直至参数的估计值收敛或达到最大迭代次数。
布尔莎七参数模型的优势在于它能够有效地描述地壳的三维形变,并包括了平移、旋转和伸缩变形等多个参数。
这使得该模型可以用来研究地壳的复杂形变特征,对于大地测量、地震学和地球物理学等领域的研究具有重要的应用价值。
然而,布尔莎七参数模型也存在一些限制。
例如,该模型假设地壳的形变是线性的,并且忽略了地壳的非弹性形变。
在实际应用中,由于地壳形变的复杂性,可能需要引入更多的参数或采用更复杂的数学模型来描述地壳的形变。
基于MATLAB的七参数坐标系统转换问题分析(精)
基于 MATLAB 的七参数法坐标系统转换问题分析 1张鲜妮 21, ,王磊 21,1、中国矿业大学环境与测绘学院,江苏徐州 (2210082、江苏省资源环境信息工程重点实验室,江苏徐州 (221008E-mail:摘要:GPS 测量的坐标是基于 WGS-84坐标系下的,而我国实用的测量成果大多都是基于北京 54坐标系下的。
随着 GPS 测量技术的广泛使用,由 WGS-84坐标向北京 54坐标系下坐标的转换问题一直是一个可探讨的问题, 坐标系统转换的现有模型很多, 但常用的还是经典的七参数转换模型。
随着不断的实践研究, 发现七参数在进行坐标系统转换时有一定的局限性。
本文采用 MATLAB 语言编写了七参数法坐标系统转换程序,并对七参数坐标系统转换的若干问题进行了分析讨论。
分析结果表明, 小区域范围内用正常高代替大地高对坐标转换精度影响很小; 公共点分布情况对坐标转换精度影响显著; 合适的公共点密度有利于提高坐标转换精度。
关键词:七参数法;坐标系统; MATLAB ;转换问题1. 引言随着 GPS 空间定位技术的发展, GPS 技术以其快速、精确、全天候在测量中的应用变的越来越广泛, GPS 成为建立基础控制网的首选手段 ]1[,由于 GPS 系统采用的是 WGS-84坐标系, 是一种地心坐标系, 而我国目前常用的两个坐标系 1954年北京坐标系 (以下称 BJ54 和 1980年国家大地坐标系,是一种参心坐标系,采用克拉所夫斯基椭球为参考椭球,并采用高斯克吕格投影方式进行投影, 我国的国土测量成果和在进行工程施工时大都是基于这两个坐标系下的。
所以在利用 GPS 技术进行测量过程中必然存在由 WGS-84坐标向北京 54坐标系下的转换问题。
现有的转换模型已经成熟,归纳起来主要有布尔莎 -沃尔夫模型(七参数法、莫洛登斯基 -巴代卡斯模型和范士模型 ]2[。
本文主要分析讨论是基于七参数转换模型, 分析工具是MATLAB 软件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表 1 西安 8 O与 国 家 2 0 0 0坐 标 系 几何 参数 对 比
[ 收 稿 日期 ] 2 0 1 5 —0 4 ~0 2 [ 作者简介] 朱小美( 1 9 9 2 一) 女, 汉族 , 安徽安庆人 , 在读硕士研究生 , 研 究 方 向 为 矿 山 变形 监 测 。
—
yz
一 —
此 时可 采 用 迭 代 法 进 行 解 算 。迭 代 至 相 邻 两 次所 求 的 B, H 之 差 小 于 某 一 要 求 的 限 值 为 止, 当要 求 H 的计 算 精 度 是 0 . 0 0 1 m, B 的精 度 是0 . 0 0 0 0 1 时 , 一 般迭 代 4次左 右 。
・
北京测绘 ・
准 下 坐 标 间相 互 转 换
1 . 大 地坐 标 ( B, L, H)转换 为空 间直 角坐标
( X, Y, Z) X 一 ( N + H) c os Bc o s L
㈦
Y 一 ( N + H) c o s Bs i n L
2 . 2 不 同基 准 下 坐 标 系相 互 转 换
一
X
y, .
i 1 O 0 X
Z0 O
一 0
一
.
“ 1
} 0 1 0 Y1
1 0 0 1 Z 1
( 5)
d2
不 同空 间直 角 坐 标 系 间 的转 模 型 主 要 有 布
坐 标 系所对 应 的椭 圆长半 径 , e 表示 第一 偏心 率 。
标系 ( B, L, H)
L — a r c t a n
B ~
c t a
n [
- c -
—
c 一
N
]
( 2)
i ] = = 『 ] 知 值 『 萎 ] 转 换 值 c 4
值
H 一— v /  ̄
尔莎模 型 、 莫 洛金 斯 基 模 型 和 武 测模 型 等 ] 。三 者 形式 上 略 有 差 异 , 但就转换 成果和精度来说 ,
y X
X
“3
一 二 一 = ●
a4
将其改 写成 矩 阵形式 则为 : V— B・ +L , 我 们可 以按 照最e b2 - 乘法 原 则 即 V PV — mi n,
利用 MAL TAB设 计 并 编 写 程 序 实 现 了西 安 8 O
同空 间直 角坐标 系 间的 转 换 , 其 中最 关键 的便 是 确 定转 换 参 数 及 其 数 学 模 型 。两 坐 标 系 采 用 的 几 何参 数对 比见 表 1 。
坐标 系 与 2 0 0 0国家 大 地 坐 标 系 间 的 布 尔 莎模 型
2 0 0 0国家 坐 标 系 是 由 2 0 0 0国 家 GP S大 地
控制 网和 2 0 0 0国家 重力 基 本 网及 利 用 常 规测 量 技术 建立 的 国家 天 文 大 地 网联 合 平 差 才 获 得 的
三维 地 心坐标 系_ l 2 ] , 西安 8 0坐 标 系属于 参心 坐标
1 引 言
验证 , 实现坐标转换 , 精度符合要求 , 结果可靠 。
随着坐标系的更新、 精化及统一标准化发
展, 从 2 0 0 8年 7月 1日起 我 国正 式 启 用 2 0 0 0国 家 大地 坐标 系作 为 国家 法 定 坐 标 系 。西安 8 O坐
2 两坐标 系间的转换 原理
( 1 )
Z— r N( 1~ e 。 )+ H ] s i n B
式 中, N 为 该 点 卯 酉 圈 曲率 半 径 ( N — a /
,
/ 1 一e s i n B ) P 一( n 一b ) / & , n表示该大地
2 . 空 间直 角坐 标 系 ( X, Y, Z) 转 换 为大 地 坐
2 0 1 5 年第 5 期
・ 北京测绘 ・
基于 MA T L A B的布尔莎模 型七参数解算实现
朱小美 张 官进 朱 楠
( 安 徽 理 工 大 学 测绘 学 院 , 淮南 2 3 2 0 0 1 )
[ 摘 要 ] 基 于 西安 8 O坐 标 系与 2 0 0 0国 家 坐 标 系的 转 换 关 系 , 根 据 布 尔莎模 型 , 给 出 了应 用 MAL TA B 编程七参数的计算程序 , 实现 了 2 0 0 0国 家 坐 标 系与 西 安 8 0坐 标 系 转 换 的 自动 化 解 算 , 并 用 实例 对 解 算 出的 参 数 进 行 了精 度 评 定 和 分 析 。 [ 关键词] 坐标 转 换 布 尔 莎模 型 七 参 数 [ 中 图分 类 号 ] P 2 2 6 3 MAT L A B [ 文章编号] 1 0 0 7 -3 0 0 0 ( 2 0 1 5 ) 0 5 -5 [ 文献标识码] B
角坐 标系 , 因此 该 两种 坐 标 系 转 换 的 实 质就 是 不
在 大 幅度增 加 。MAL T AB对 于 数 学运 算 特 别 是 矩 阵运 算 , 非常 高效 [ 1 ] , 而 文件批 量 坐标 转换 又 涉 及极 为 复杂 的数 据 计 算 , 若 是 手 动 计 算 效 率 势 必 极低 且 精度 得 不 到 保 障 , 为了提高成果质 量 , 减 少存 在 的误 差 问 题 , 求 得 最 可 靠 的转 换 值 , 本 文
标 系是 我 国经典 大 地 测 量 成 果 的 归算 和应 用 , 而 基 于此 坐 标 系 的各 种 坐 标 成 果 将 随 之 需 要 转 换
到2 0 0 0国家大地 坐标 系 , 因此 坐标 转 换 的工作 量
系 。研究 两者 的相 互 转 换 , 归 根 结 底 就 是研 究 参 心坐 标 系 与 地 心 坐 标 系 之 间 的坐 标 转 换 。尽 管 参心 坐标 系和 地心 坐 标 系 的参 考椭 球 体 、 定 位 定 向技 术也 不尽 相 同 , 但 共 性 即均 可 转 换 成 空 间直