西门子控制系统维护说明书S篇
西门子 wincc runtime advanced sm@rtserver 远程访问指南说明书

Remote Access toWinCC RuntimeAdvancedSm@rtServer,SIMATIC WinCC Runtime Advanced SiemensIndustryOnlineWarranty and LiabilityS i e m e n s A G 2018 A l l r i g h t s r e s e r v e dWarranty and LiabilityNoteThe Application Examples are not binding and do not claim to be complete regarding the circuits shown, equipping and any eventuality. The Application Examples do not represent customer-specific solutions. They are only intended to provide support for typicalapplications. You are responsible for ensuring that the described products are correctly used. These Application Examples do not relieve you of the responsibility of safely and professionally using, installing, operating and servicing equipment. When using these Application Examples, you recognize that we cannot be made liable for anydamage/claims beyond the liability clause described. We reserve the right to makechanges to these Application Examples at any time without prior notice. If there are any deviations between the recommendations provided in this Application Example and other Siemens publications – e.g. Catalogs – the contents of the other documents have priority.We do not accept any liability for the information contained in this document.Any claims against us – based on whatever legal reason – resulting from the use of the examples, information, programs, engineering and performance data etc., described in this Application Example shall be excluded. Such an exclusion shall not apply in the case of mandatory liability, e.g. under the German Product Liability Act ("Produkthaftungsgesetz"), in case of intent, gross negligence, or injury of life, body or health, guarantee for the quality of a product, fraudulent concealment of a deficiency or breach of a condition which goes to the root of the contract("wesentliche Vertragspflichten"). However, claims arising from a breach of a condition which goes to the root of the contract shall be limited to the foreseeable damage which is intrinsic to the contract, unless caused by intent or gross negligence or based on mandatory liability for injury of life, body or health. The above provisions do not imply a change of the burden of proof to your detriment. It is not permissible to transfer or copy these Application Examples or excerpts of them without first having prior authorization from Siemens AG in writing.Security informa-tionSiemens provides products and solutions with industrial security functions that support the secure operation of plants, systems, machines and networks.In order to protect plants, systems, machines and networks against cyber threats, it is necessary to implement – and continuously maintain – a holistic, state-of-the-art industrial security concept. Siemens' products and solutions constitute one element of such a concept.Customers are responsible for preventing unauthorized access to their plants, systems, machines and networks. Such systems, machines and components should only beconnected to an enterprise network or the internet if and to the extent such a connection is necessary and only when appropriate security measures (e.g. firewalls and/or network segmentation) are in place.For additional information on industrial security measures that may be implemented, please visit /industrialsecurity .Siemens' products and solutions undergo continuous development to make them more secure. Siemens strongly recommends that product updates are applied as soon as they are available and that the latest product versions are used. Use of product versions that are no longer supported, and failure to apply the latest updates may increase customer's exposure to cyber threats.To stay informed about product updates, subscribe to the Siemens Industrial Security RSS Feed at /industrialsecurity .Table of ContentsS i e m e n s A G 2018 A l l r i g h t s r e s e r v e dTable of ContentsWarranty and Liability ................................................................................................. 2 1 Task ..................................................................................................................... 4 2Solution............................................................................................................... 5 2.1 Overview............................................................................................... 5 2.2 Hardware and software components ................................................... 6 2.2.1 Validity .................................................................................................. 6 2.2.2 Components used ................................................................................ 6 3Principle of Operation (8)3.1 Sm@rtServer ........................................................................................ 8 3.2 Application example ............................................................................. 8 4Installation and Startup (9)4.1 Installing the software ........................................................................... 9 4.2 Startup .................................................................................................. 9 4.2.1 Sample project ..................................................................................... 9 4.2.2 Project library ..................................................................................... 11 4.2.3 Transferring the license ...................................................................... 11 4.2.4 Operator panel settings ...................................................................... 12 4.2.5 Sm@rtServiceMonitor ........................................................................ 14 4.2.6 Sm@rtClient app ................................................................................ 16 4.2.7 Sm@rtClient application ..................................................................... 17 4.2.8 Sm@rtClient control ........................................................................... 19 4.2.9 Internet Explorer ................................................................................. 19 5Operation of the Application (20)5.1 Overview............................................................................................. 20 5.2 Sample project ................................................................................... 20 5.3 Sm@rtServiceMonitor (22)6 Additional Notes .............................................................................................. 247 Links & Literature ............................................................................................ 25 8History (25)S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d1 TaskRemote access is used to its full extent when you can use the same functions as if you were standing right in front of the operator panel. Using existing hardware such as your smartphone, tablet or standard notebook enables you to achieve the greatest possible flexibility.Apart from all the advantages remote access provides, you still need to be aware of the hazards such an intervention may involve.In most cases, the user remotely accessing the plant cannot see what is happening in the plant at the moment of access. The intervention must not put the staff on site or the plant at risk. To this end, it is important that you lock certain functions (e.g., manual control of a gripper) for the remote maintenance user. In addition, the staff on site should be informed of an intervention and be able to stop it at any time if necessary.2.1 Overview2 Solution2.1 OverviewDiagrammatic representationThe diagrammatic representation below shows the most important components ofthe solution:–The Sm@rtClient Viewer enables you to access the Sm@rtServer from a programmer or another standard PC.–The Sm@rtClient View WinCC control enables you to access theSm@rtServer via a WinCC Runtime Advanced station.–Internet Explorer enables you to access the Sm@rtServer from any PC.∙The operator panel layout is represented by the Sm@rtClient app and the Sm@rtClient Viewer and you can use, for example, keyboards∙Up to four Sm@rtClients per WinCC Runtime Advanced station are possible simultaneously (number depends on the device, see \5\)∙Operator actions are displayed on the device on site; i.e., an employee on site can follow your operator steps∙Wide range of possible applications (see scenarios in the "General information"document)© S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d∙ Checking the incoming connections using "Sm@rtServiceMonitor"∙Increased security through a VPN connectionScopeThis application does not include a description of ∙ the basics of configuring with WinCC (TIA Portal)∙setting up a VPN connection; information on this topic can be found in the "VPN connection" document.2.2Hardware and software components2.2.1ValidityThis application is valid for ∙WinCC Runtime Advanced PC stationsNoteStarting with TIA Portal V15, the "Sm@rtServiceMonitor" tool for SIMATIC Comfort Panels was fully integrated into the "SIMATIC HMI Option+" tool. For more information on SIMATIC HMI Option+, use the following link: https:///cs/ww/en/view/109754400NoteWith TIA Portal V14 or higher, Sm@rtServer is also available for SIMATIC HMI Basic Panels. The "Sm@rtServiceMonitor" tool can only be used with WinCC Runtime Advanced.2.2.2 Components usedThe application was created with the following components:Hardware componentsTable 2-1S i e m e n s A G 2018 A l l r i g h t s r e s e r v e dSoftware components and licensesTable 2-2Configuring and using the VPN connection requires more components. Details can be found in the "VPN connection" document.Sample files and projectsThe following list contains all files and projects that are used in this example.Table 2-33 Principle of Operation 3.1 Sm@rtServerS i e m e n s A G 2018 A l l r i g h t s r e s e r v e d3Principle of Operation3.1Sm@rtServerThe WinCC Sm@rtServer option enables operator control and monitoring of operator panels via the intranet/internet. The Sm@rtServer provides its user*******************************************************@rtClient,for example a standard PC, a smartphone or another SIMATIC HMI Panel. The Sm@rtClient concept is not only used for operator control and monitoring when performing service jobs, it can also be used for large, geographically distributed machines and plants. The mobile end use option makes this solution also suitable for commissioning as you can move around the entire plant, regardless of the operator panel's place of installation.3.2 Application exampleSm@rtServiceMonitorThe "Sm@rtServiceMonitor" tool is used to check the Sm@rtClient connections to a WinCC Runtime Advanced PC station. The IP addresses and the number of devices accessing the operator panel are stored in internal WinCC tags for further processing (VncClient1, VncClient2, VncClient3, VncClient4 and VncConnectionCount).SOAP web serviceThe SOAP (Simple Object Access Protocol) web service is used for writing the tags. The operator panel provides this service via the integrated web server. It can be used to access the HMI Runtime tags from external applications. Using theSOAP service requires a web user with the appropriate permission on the operator panel (see chapter 4.2.4 Operator panel settings ).Sample projectIn the event of a value change of one of the tags, "VncClient1", "VncClient2", "VncClient3" or "VncClient4", the "CheckConnections" script is called. This script first checks what has changed compared to the previous cycle. If a user is logged in to the operator panel on site and a new Sm@rtClientconnects, a message appears on the operator panel. This message is displayed for a defined time and enables the operator on site to directly terminate the incoming connection. (see chapter 5.2 Sample project ). The remote operator cannot access WinCC Runtime Advanced until this time has elapsed. In the sample project, the default setting for this time is 10 seconds; however, you can change this setting (see chapter 6 Additional Notes ).As long as (at least) one Sm@rtClient connection to the operator panel is active, this is indicated by a flashing button. Clicking this button allows you to terminate the connections at any time.4.1 Installing the software© S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4Installation and Startup4.1Installing the softwareTo use this application example, at least the SIMATIC WinCC Comfort software must be installed on your programmer.4.2 StartupThe application example can be started up in different ways. ∙First, establish a VPN connection between the WinCC Runtime Advanced PC *******************************************************"VPN connection" document.∙Depending on whether you want to use the project contained in this entry or include the functionality in your own project, follow the steps described in chapter 4.2.1 Sample project or 4.2.2 Project library .∙ Then transfer, if not yet available, the Sm@rtServer license to the operator panel as described in chapter 4.2.3 Transferring the license .∙Make the necessary Sm@rtServer and web server settings as described in chapter 4.2.4 Operator panel settings and then configure the tool following the steps in chapter 4.2.5 Sm@rtServiceMonitor .∙Depending on the Sm@rtClient you are using, follow the instructions in chapter 4.2.6 Sm@rtClient app , 4.2.7 Sm@rtClient application , 4.2.8 Sm@rtClient control or 4.2.9 Internet Explorer .4.2.1 Sample projectTable 4-14.2 StartupS i e m e n s A G 2018 A l l r i g h t s r e s e r v e dIf you are using a different SIMATIC IPC, right-click the device and select "Change device / version".Select the operator panel you are using.Download the project to the device.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.2 Project libraryTable 4-2Open the "Libraries" tab on the right-hand side of TIA Portal.Click the icon to open a global library and open the library of the application example.Then open the "RuntimeAdvanced" folder.Use drag and drop to move the "Task_Change_User" task to the task scheduler.4.2.3 On the WinCC Runtime Advanced PC station, open the Automation License Manager and use drag and drop to move the "Sm@rtServer for WinCC Runtime Advanced" license from the license data medium to the PC.NoteWith TIA Portal V14 SP1, the Sm@rtServer in conjunction with WinCC Runtime Advanced no longer requires a license.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.4 Operator panel settingsTable 4-3 WinCC Runtime Advanced :Open the PC's Control Panel and select "WinCC Runtime Advanced Internet".Go to the "Remote" tab.Check "Start automatically after booting" if you want the Sm@rtServer to start with the operator panel and not later with Runtime. Check "Close with Runtime" if you want the Sm@rtServer to close with Runtime. Click the "Change settings" button.In Password 1 and Password 2, enter secure passwords for access of theSm@rtClients and check the "View only" check box if you want a Sm@rtClient to only monitor the operator panel with this password.If you are using an operator panel with a version lower than V13, always change the default passwords.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d3).Click the "User Administration" button.Create a new user, "SoapUser", and assign a password to this user. Click the "Apply" button.Go to the "Authorizations" tab and enable the "SoapUser" authorization for this user.Close the open dialogs.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.5 Sm@rtServiceMonitorTable 4-4 unzip the zip folder.Start the "SetPasswordTool.exe" tool.In the file browser, select the "SmartServiceMonitor.ini" file.Enter the password of the "SoapUser" user and press Enter to confirm. Repeat this step.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e dClose the "SetPasswordTool" by pressing any button.To use the tool on a WinCC Runtime Advanced PC, copy the files to the Runtime PC and manually start the "SmartServiceMonitor.exe" or add a shortcut to this file to the PC's Startup folder.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.6 Sm@rtClient appTable 4-5 Download the "SIMATIC WinCC Sm@rtClient" app to your smartphone or tablet and install it. You can find the app in \3\ (iOS), \4\ (Android) or using the following QR code.Start the NCP VPN Client app and establish a connection to the automation cell. document.Start the SIMATIC WinCC Sm@rtClient app and either manually add a new connection or use automatic Sm@rtServer detection to search for the desired SIMATIC HMI operator panel.Password protect both the device and the app to prevent unauthorized persons **************************************,donotsavethepasswordalong with the connection settings, but enter it manually when prompted.S i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.7 Sm@rtClient applicationIf WinCC Runtime Advanced is installed on the PC, the Sm@rtClient application is also installed. Otherwise, you can copy it from the "Support\SmartClient" folder of the WinCC product DVD or from another PC from the "...\Siemens\Automation\WinCC RT Advanced" folder.Table 4-6 document.Select "Start > All Programs > Siemens Automation > Runtime Systems > WinCC Runtime Advanced > Sm@rtClient" to start the Sm@rtClient Viewer.Enter the Sm@rtServer's IP address and, if necessary, change the settings in "Options".Click the "Connect" button.Enter a Sm@rtClient password and click "OK".S i e m e n s A G 2018 A l l r i g h t s r e s e r v e dYou can save the connection settings and therefore automatically save the Sm@rtClient application without user input.Table 4-7 Sm@rtClient application.Select "Save connection info as...".Select a storage location and a file name and click "Save". The following warning appears:Confirm the message with "Yes" only if you can ensure that no unauthorized person can access this file.Using command prompt or a batch file, you can then open the Sm@rtClientS i e m e n s A G 2018 A l l r i g h t s r e s e r v e d4.2.8 Sm@rtClient controlTable 4-8Insert the "Sm@rtClient view" control into a screen.In "Properties > General", enter the IP address or device name, port and, if necessary, other settings.In "Properties > Scaling", you can set whether the display will be scaled when4.2.9 Internet ExplorerTable 4-9Note More information on the Java security settings can be found here: /WW/view/en/1019775115 Operation of the Application 5.1 OverviewS i e m e n s A G 2018 A l l r i g h t s r e s e r v e d5Operation of the Application5.1OverviewFigure 5-15.2 Sample projectFigure 5-2The items included in the screen are part of the "Template_Topic_001" template. Field 1, "New connected client:", displays the IP address of the Sm@rtClient last ******************************************************@rtClientsso that the operating staff on site can immediately decide whether unauthorized users are accessing the plant.Button 2 flashes blue/yellow while one or more Sm@rtClients are accessing the *******************************************@rtClientisconnected.Clicking the button disconnects all connected Sm@rtClients.Button 3 allows you to log in a user. The sample project contains the following users:1 2 345.2 Sample projectS i e m e n s A G 2018 A l l r i g h t s r e s e r v e dTable 5-1Field 4 displays the user name of the logged in user. Logging in a user is necessary for the following function.Figure 5-3If a user has logged in to the operator panel and a Sm@rtClient connects to the Sm@rtServer, this user interface appears.A ten-second time window starts, in which the user can decide whether the connection may be established. An I/O field (1) displays the remaining time. The time can be set in the WinCC project. For details, see the Additional Notes chapter.The "Cancel" (2) button allows you to terminate the connection. Clicking the button disconnects all connected Sm@rtClients.The I/O field (3) displays the IP address of the newly connected client so that the operator on site can decide whether this client gains access.To allow the connection and to be able to access the operator panel, wait until the time expires. Then the previous screen is activated and the locally logged in user is logged out.123S i e m e n s A G 2018 A l l r i g h t s r e s e r v e dFigure 5-4This screen displays the IP addresses and the number of currently connected Sm@rtClients (1).TodisconnecttheconnectedSm@rtClients,*******************************Sm@rtServer does not start correctly, you can use the button (2) to start it manually.5.3 Sm@rtServiceMonitorIf you are using the tool on a PC, you can copy a shortcut to the tool to the PC's Startup folder.As can be seen in the screenshot below, the icon bordered in red in the Comfort Panel's/PC's taskbar indicates whether the tool has been started.Figure 5-512S i e m e n s A G 2018 A l l r i g h t s r e s e r v e dDouble-clicking the icon opens the diagnostic window. It allows you to check whether the "Sm@rtServiceMonitor" tool works correctly.Figure 5-6If the "Auto Scroll" check box (1) is checked, the most recent messages areautomatically displayed. However, you can also use the scroll bar (2) to search for old entries.The "Hide" (3) button closes the diagnostic window. The "Close" (4) button exits the tool.123 46 Additional NotesS i e m e n s A G 2018 A l l r i g h t s r e s e r v e d6 Additional NotesThe time until the remote maintenance user gains access to the operator panel can be set in the WinCC (TIA Portal) project.To do this, open the "Screen_User_Access" screen. Open the "Properties >Events" of the screen. Change the cycle of the "SimulateTag" system function with the "LogoutLocalUser" tag. The value corresponds to a multiple of 200 ms, i.e., for example, 50 for 10 seconds.Figure 6-1Open the "Tags_SmartClient" tag table. For the "Logout_Time" tag, set the desired time in seconds as the start value.Figure 6-27 Links & LiteratureS i e m e n s A G 2018 A l l r i g h t s r e s e r v e d7 Links & LiteratureTable 7-18 HistoryTable 8-1。
PLC经验分享 西门子S-指令浅谈(一)

PLC经验分享西门子S-指令浅谈(一)PLC经验分享:西门子S-指令浅谈近年来,随着自动化技术的不断发展,PLC已成为自动化控制系统中不可或缺的一部分。
而西门子S-指令作为西门子PLC控制器中最常用的编程指令之一,有着广泛的应用范围和应用价值。
本文将讨论西门子S-指令的基础用法、常见错误及应对方法等方面问题,为读者提供一些实用的知识和经验。
一、基础用法1.1 S-指令介绍S-指令是西门子PLC控制器中最常用的编程指令之一。
它有两种类型:S-R/W和S-FC。
其中S-R/W是读写指令,可以读取和修改PLC内存中的数据。
S-FC是函数指令,可以执行各种运算、逻辑判断和数据处理。
1.2 S-R/W指令用法S-R/W指令的基本格式如下:S 开头符号LD Load指令,表示将后面的地址拷贝到一个寄存器中保存C 地址类型,表示使用绝对地址I 地址的数值存储的操作数,可以是数据、控制字或状态字例如,S7 LD C100 I0 代表将地址100的数据存储在S7中。
又例如,S8 LD C400 FAT代表将地址400中的第三组状态字的值存储在S8中。
1.3 S-FC指令用法S-FC指令的基本格式如下:S 开头符号FC Function Code,即函数码,根据不同的功能会有不同的代码地址目标地址,表示所有输入数据的输入地址输入数据函数需要的输入值,可以是数据或其他信号例如,S28 FC5 C500 W2 C200.0 表示执行函数码为5的函数,并将输入数据设置为W2寄存器的值,直接返回结果。
另一个例子是S29 FC8I200 #R4.9 SA1 表示执行函数码8的函数,其中输入数据分别为I200、R4.9和SA1。
二、常见错误及应对方法2.1 S-R/W指令错误常见的S-R/W指令错误包括地址越界、数据类型错误等。
在遇到这类错误时,程序就会停止工作。
要解决这类错误,可以采用以下方法:1) 检查地址是否正确,防止地址越界;2) 检查指令语句的格式是否正确,尤其注意逗号和空格;3) 确认数据类型是否正确,以避免数据类型不匹配的问题。
西门子S LC指令系统手册
SIMATIC 指令集:西门子公司为S7-200 PLC 设计的编程语言,不支持系统完全数据类 型检查,可以用梯形图(LAD)、功能块图 (FBD)和语句表(STL)编程语言,且指令 执行时间较短。 (一)梯形图(LAD)编程语言
LAD 是与电气控制电路图相呼应的一种图 形语言,其信号流向清楚、简单、直观、易 懂,很适合电气工程人员使用;常作为第一用 户语言。
VB(0-5119)
储器 作中的中间结果或 (2)V[数据长度][起始字 VW(0-5118)
(V)
其他数据,即全局 节地址]
有效
例:VB20 VW100 VD2
VD(0-5116)
(1)L[字节地址].[位地
局部存 存放局部变量,是 址] 例: L0.0
储器 局部有效的,即只 (2) L[数据长度][起始
(1) I[字节地址].[位地 I(0.0-15.7)
输入映 存放输入点的状
址] 例:I0.1
IB(0-15)
像寄存 态,每一个输入端 (2) I[数据长度][起始字 IW(0-14)
器(I) 子与I的相应位相
节地址]
对应
例:IB4 IW6 ID10
ID(0-12)
存放CPU执行程序 (1)Q[字节地址].[位地址] Q(0.0-15.7)
系统区:存放有关PLC配置结构的参数, 存储器为:EEPROM;
数据区:是S7-200 CPU 提供的存储器的特定区 域,将数据存储区作了进一步的分区,并为每个存储 区域赋予了不同的功能,形成专用的存储单元。 包括:I、Q、V、M、S、SM、L、T、C、AI、AQ、 AC、HC;存储器为:EEPROM和RAM。 (一)数据区存储器的地址表示格式 1. 位地址格式 由存储器区域标识符、字节地址及位号构成 例如:V5.4
西门子控制系统维护说明书S7-300篇
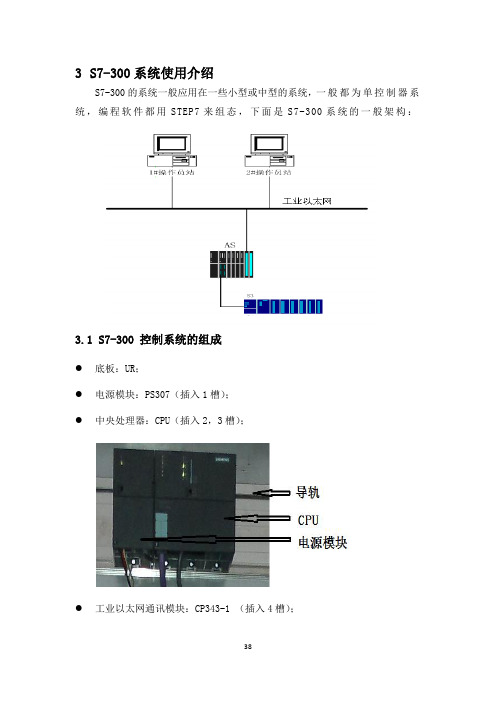
3S7-300系统使用介绍S7-300的系统一般应用在一些小型或中型的系统,一般都为单控制器系统,编程软件都用STEP7来组态,下面是S7-300系统的一般架构:3.1 S7-300 控制系统的组成●底板:UR;●电源模块:PS307(插入1槽);●中央处理器:CPU(插入2,3槽);●工业以太网通讯模块:CP343-1 (插入4槽);●I/O模块。
3.1.1底板●安装各种模块(如:PS,CPU,CP,I/O 模块等);●提供背板总线:I/O总线;通讯总线;●通过背板总线实现各模块之间的数据和信号交换;●电源模块所提供5VDC和24VDC通过背板总线供给各模块;●电源模块必须插在底板的最左边(槽1)。
3.1.2电源模块●采用封闭结构的模块设计,安装在底板上;●插入式的AC/DC供电连接;●保护级别:IP20;●两种输出电压:5VDC和24VDC,并共用一个地;●监视两个输出电压,如其中一个发生故障,该模块输出一个报错信号给CPU;●具有输出短路保护功能;●在前面板上有运行和故障指示灯。
3.1.3 CPU模块●整个控制系统的核心;●储存和运行操作系统程序;●储存和运行用户程序;●与各种功能模块及I/O模块进行数据交换;●进行实时的连续及顺序控制(如PID控制,泵和电机的启停等用户所需的控制);●完成自诊断,接收各种模块的诊断信息。
CPU含有两类程序:操作系统和用户程序。
其中操作系统主要作用是:●处理CPU再启动;●刷新过程映象的输入部分及将输出部分送出;●执行用户程序;●检测中断并执行中断程序;●检测并处理错误;●管理内存;●与操作员站、工程师站及其它设备通讯。
用户程序主要作用是:●完成用户所规定的控制任务。
CPU模块指示灯含义:●INTF:红色,内部故障;●EXTF:红色,外部故障;●BUS:红色,当红灯亮时,为MPI/PROFIBUS-DP接口1总线故障,当红灯闪时有两种情况:DP为主站时,一般是一个或多个从站没有响应,DP为从站时,一般是地址错误;●FRCE:黄色,变量强制激;●RUN:绿色,CPU在运行模;●STOP:红色,CPU在停止模式。
西门子SIMOCODE pro电机管理系统说明书

/simocodeSIMOCODE proFlexible, modular, integrated –the way modern motor management should be.SIMOCODE pro offers multifunctional, solid-state full motor protection. The motor management system monitors, protects and controls constant-speed motors and enables the implementa-tion of predictive maintenance. It does not wait for a problem to occur before shutting down the motor, but establishes a level of transparency in advance to avoid shutdowns and improve productivity. SIMOCODE pro delivers detailed operating, service and diagnostic data across the entire process. SIMOCODE is easy to use, requires no advanced engineering, and integrates into virtually any automation system. SIMOCODE pro communicates via PROFIBUS and PROFINET, Modbus RTU, EtherNet/IP and OPC UA.For 30 years, SIMOCODE pro has been controlling and monitoring low-voltage, constant-speed motors all over the world. For plant reliability, SIMOCODE is used to keep motors running. And with its Cloud-based connection, SIMOCODE gives you more transparency and power.With both the SIMOCODE pro GeneralPerformance and SIMOCODE pro HighPerformance device classes, we offerscalable, flexible solutions for industrialcontrols and plant optimization in thecontext of Industry 4.0.3SIMOCODE pro – General Performance:Ideal for the entry levelThe smart and compact motor management system for direct-on-line, reversing, and star-delta (wye-delta) starters or for controlling a motor starter protector or soft starter. The basic system includes a current measuring module and the basic unit for overload or thermistor motor protection, for example. Communication with the automation level takes place via PROFIBUS/PROFINET. Optional additions include an operator panel and an expansion module that allows additional inputs/ outputs, ground-fault detection and temperature measure-ment to be realized. SIMOCODE pro – High Performance:The fully professional solution for every motorThe SIMOCODE pro High Performance motor management system is variable, intelligent and can be adapted individually to suit any requirement. The basic system includes a module for measuring current (and optionally also voltage), as well as a basic unit, and is suitable for removing pump blockages, for example. Communication with the automation level takes place via PROFIBUS or Modbus RTU, via Ethernet with the PROFINET or EtherNet/IP protocols, and also via OPC UA. The optional expansion modules include separate current/voltage measuring modules for dry-running protection, an operator panel with display, a ground-fault module, a temperature module, standard digital modules, fail-safe digital modules and an analog module.SIMOCODE pro – Modern motor management: scalable and modularTwo device series form the core of the multifunctional SIMOCODE pro motor man-agement system: General Performance and High Performance. The devices in both series incorporate all essential motor protection, monitoring and control functions– including data transparency through the Cloud connection. SIMOCODE pro General Performance is your entry into modern motor management and addresses standard motor applications. SIMOCODE pro High Performance features up to five expansion modules, including fail-safe modules, and offers additional measured variables. Findout how you can take advantage of the two SIMOCODE pro device series in all areasof the automation industry.4SIMOCODE pro Safety:Fail-safe expansion modulesVarious modules are available for SIMOCODE pro for theextended protection of personnel, machines and the envi-ronment. These guarantee the safety-related shutdown ofmotors and meet all the requirements of the standards.The advantages:• F unctional switching and fail-safe shutdown withoutmanual wiring or additional effort• S afety function parameters can be flexibly configured• T ransfer of meaningful diagnostic data to thecontrol system• L ogging of errors for detailed evaluation•Fail-safe shutdown via PROFIsafe or locallyHighPerformanceSIMOCODE pro V PN SIMOCODE pro V EIP SIMOCODE pro V PB SIMOCODE pro V MR Current / voltagemeasuring moduleOperator panel with displaymax. 5 / 7 expansionmodulesSafetyExtended control functions(e.g. positioner, pole-changing starter)GeneralPerformance SIMOCODE pro V PN GP SIMOCODE pro SCurrent measuring moduleOperator panel1 expansion moduleBasic control functions(e.g. direct-on-line/reversing start)5Every water utility operator is familiar with the problems of a blocked pump – and the possible consequences: environmental harm, damage due to flooding, and dangers to health as a result of lifting and cleaning pumps. This is compounded by the financial impact of plantdowntimes. SIMOCODE pro monitors the current and active power of the pump motor – and derives the pumpstatus from them. If a defined threshold value is exceeded, SIMOCODE pro autonomously reverses the rotational direction of the pump in order to dislodge deposits on the impeller blades.Say goodbye to blocked pumps with SIMOCODE pro – the modular, compact motor management system that tackles the challenge by automatically reversing the pump. SIMOCODE pro can be retrofitted in existing plants.Remove pump blockages and increase availability.6Reliable monitoring – dry-running protection redesigned.Conventional dry-running monitoring with a sensor Active power-based dry-running protectionReliable dry-running protection is a must in many applications in the chemical industry. SIMOCODE pro reliably prevents the dry running of centrifugal pumps in order to preclude hazardous situations and completely redefines dry-running protection for pumps inSensors on centrifugal pumps in hazardous areas are often prone to high installation and maintenance costs. The solu-tion: Using active power-based dry-running detection, SIMO-CODE pro monitors the active electrical power consumption of the pump motor and thus the status of the pump – with-out the need for additional monitoring devices or sensors to be installed. The new technology ensures reliable explosion protection in accordance with ATEX and IECEx criteria and saves costs and time for commissioning and maintenance.Your benefits through active power-based dry-running protection Earlier fault detection• D irect conclusions concerning the flow rate can be drawnfrom the active power consumption of the pump motor • R eliable prevention of dry running of the pump andtherefore less damage to the pump Cost and time savings• N o maintenance effort due to the elimination ofmechanical wear of the sensors • No additional sensor requiredReduction of hardware• N o need for additional sensors and mechanicalcomponents • Simplified engineering Reliable monitoring of the system• Compliance with ATEX and IECEx criteria• R eliable and automatic pump shutdown in the event ofunacceptable operating conditions7With the OPC UA industrial M2M communication protocol, SIMOCODE pro provides an additional communication interface that is independent of the automation system.The open and supplier-independentcommunication via OPC UA guaran-tees the direct exchange of data withHMI panels or SCADA systems. Motor,process and plant data is thereforeavailable without any losses, wher-ever it is needed: at the device, butalso in the control room for diagnosticpurposes. As part of the digital revo-lution and the efforts to evaluate vastquantities of data even more quickly,all motor data from SIMOCODE procan be transmitted by the most directroute to the Cloud using OPC UA.The data can then be used moreintensively and in a targetedfashion – without the need forany intervention in the motor control.The result: Plant availability andefficiency are increased, because youcan run analyses, improve energyconsumption, or even optimize theentire process. SIMOCODE pro speaks to everyone –including the Cloud.BenefitsThanks to OPC UA, SIMOCODE facilitatessimple and convenient integrationinto Cloud-based solutions, e.g. SiemensMindSphere with so many advantages:• D ata provision in the Cloud for cross-plant,reliable diagnostics• C onvenient and reliable processoptimization• P lant-wide access to control data,process values and readings withoutcomplex engineering effort• P redictive maintenance, energy datamanagement and resource optimization• E ffective protection against manipulation(security)Digitalization for more economicaloperation: SIMOCODE pro withOPC UA8SIMOCODE ES Software:For diagnostics and simple configu-ration, including in the TIA Portal SIMOCODE ES provides you with the software for the configuration, startup, operation and diagnosis of SIMOCODE pro. The software isbased on the central Totally Integrated Automation Portal (TIA Portal) engi- neering framework, providing an integrated, efficient and intuitive solution for all automation tasks. SIMOCODE ES offers you a host of advantages, including convenient configuration in the device view, graphical commissioning using drag and drop functions, online access to signal states and clear measurementcurves for diagnostic purposes.BenefitsSIMOCODE pro is your reliable data supplier for maximum process quality. The motor management system offers:• Transparency into your process • Data analysis and simulation• S ecure data storage and transmission • Visualization and recommendation(s)• I ncreased availability of components • Optimization of energy consumption • Maximization of process efficiencyThe convenient way to optimumprocess guidance: The integration of SIMOCODE pro into SIMATIC PCS 7Using standardized blocks and face-plates, SIMOCODE pro can very easily be integrated into the SIMATIC PCS 7 process control system. This makes it extremely easy to integrate service and diagnostic data from the motor manage-ment system into higher-level process control systems, for example.The result: A high level of transparency throughout the plant, enabling faults to be detected at an early stage or pre- vented from occurring altogether. In general, the greater density of informa-tion in the control system enables you to achieve not only greater transparency, but also higher process quality.9SIMOCODE pro system overview – high performanceSiemens Industry, Inc. 5300 Triangle Parkway Norcross, GA 300921-866-663-7324*******************Subject to change without prior notice All rights reservedOrder No.: CPBR-SMPR-0219Article No. DFCP-B10220-00-7600 Printed in USA© 2019 Siemens Industry, Inc.SoftwareThe technical data presented in this document is based on an actual case or on as-designed parameters, and therefore should not be relied upon for any specific application and does not constitute a performance guarantee for any projects. Actual results are dependent on variable conditions. Accordingly, Siemens does not make representations, warranties, or assurances as to the accuracy, currency or completeness of the content contained herein. If requested, we will provide specific technical data or specifications with respect to any customer’s particular applications. Our company is constantly involved in engineering and development. For that reason, we reserve the right to modify, at any time, the technology and product specifications contained herein.。
西门子 西门子G120 CU250S-2 控制单元 操作手册说明书
SINAMICSSINAMICS G120CU250S-2 Control UnitsCompact Operating InstructionsScan the QR code foradditional informati-on on SINAMICSG120.Siemens AG Industry Sector Postfach 48 48 A5E32899990B ABⓅ 07/2014 Subject to changeCopyright © Siemens AG 2014.All rights reservedLegal informationWarning notice systemThis manual contains notices you have to observe in order to ensure your personal safety, as well as to preventdamage to property. The notices referring to your personal safety are highlighted in the manual by a safety alertsymbol, notices referring only to property damage have no safety alert symbol. These notices shown below aregraded according to the degree of danger.DANGERindicates that death or severe personal injury will result if proper precautions are not taken.WARNINGindicates that death or severe personal injury may result if proper precautions are not taken.CAUTIONindicates that minor personal injury can result if proper precautions are not taken.NOTICEindicates that property damage can result if proper precautions are not taken.If more than one degree of danger is present, the warning notice representing the highest degree of danger willbe used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating toproperty damage.Qualified PersonnelThe product/system described in this documentation may be operated only by personnel qualified for the specifictask in accordance with the relevant documentation, in particular its warning notices and safety instructions.Qualified personnel are those who, based on their training and experience, are capable of identifying risks andavoiding potential hazards when working with these products/systems.Proper use of Siemens productsNote the following:WARNINGSiemens products may only be used for the applications described in the catalog and in the relevant technicaldocumentation. If products and components from other manufacturers are used, these must be recommendedor approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation andmaintenance are required to ensure that the products operate safely and without any problems. The permissibleambient conditions must be complied with. The information in the relevant documentation must be observed. TrademarksAll names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publicationmay be trademarks whose use by third parties for their own purposes could violate the rights of the owner. Disclaimer of LiabilityWe have reviewed the contents of this publication to ensure consistency with the hardware and softwaredescribed. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, theinformation in this publication is reviewed regularly and any necessary corrections are included in subsequenteditions.Table of contents1 Fundamental safety instructions (4)1.1 General safety instructions (4)1.2 Industrial security (5)2 Scope of delivery (6)3 Installing (7)3.1 Snapping the Control Unit onto the Power Module (7)3.2 Overview of the interfaces (8)3.3 Terminal blocks (10)3.4 Operator panels (14)4 Commissioning (15)4.1 Commissioning with STARTER (15)4.2 Connecting the inverter to the fieldbus (20)4.3 Frequently required parameters (22)5 More information (25)5.1 Manuals for your inverter (25)5.2 Product support (26)This manual describes how you install a SINAMICS G120 converter with CU250S-2 ControlUnit and commission it.What is the meaning of the symbols in the manual?An operating instruction starts here.This concludes the operating instruction.CU250S-2 Control UnitsCU250S-2 Control Units1Fundamental safety instructions1.1General safety instructionsWARNINGRisk of death if the safety instructions and remaining risks are not carefully observedIf the safety instructions and residual risks are not observed in the associated hardware documentation, accidents involving severe injuries or death can occur. • Observe the safety instructions given in the hardware documentation. • Consider the residual risks for the risk evaluation.WARNINGDanger to life or malfunctions of the machine as a result of incorrect or changed parameterizationAs a result of incorrect or changed parameterization, machines can malfunction, which in turn can lead to injuries or death.• Protect the parameterization (parameter assignments) against unauthorized access. • Respond to possible malfunctions by applying suitable measures (e.g. EMERGENCY STOP or EMERGENCY OFF).Fundamental safety instructions1.2 Industrial security 1.2Industrial securityNoteIndustrial securitySiemens provides products and solutions with industrial security functions that support thesecure operation of plants, solutions, machines, equipment and/or networks. They areimportant components in a holistic industrial security concept. With this in mind, Siemens’products and solutions undergo continuous development. Siemens recommends strongly thatyou regularly check for product updates.For the secure operation of Siemens products and solutions, it is necessary to take suitablepreventive action (e.g. cell protection concept) and integrate each component into a holistic,state-of-the-art industrial security concept. Third-party products that may be in use shouldalso be considered. For more information about industrial security, visit Hotspot-Text(/industrialsecurity).To stay informed about product updates as they occur, sign up for a product-specificnewsletter. For more information, visit Hotspot-Text ().WARNINGDanger as a result of unsafe operating states resulting from software manipulationSoftware manipulation (e.g. by viruses, Trojan horses, malware, worms) can cause unsafeoperating states to develop in your installation which can result in death, severe injuriesand/or material damage.•Keep the software up to date.You will find relevant information and newsletters at this address().•Incorporate the automation and drive components into a holistic, state-of-the-artindustrial security concept for the installation or machine.You will find further information at this address(/industrialsecurity).•Make sure that you include all installed products into the holistic industrial securityconcept.CU250S-2 Control UnitsCU250S-2 Control Units2Scope of deliveryScope of deliveryThe delivery comprises at least the following components:● A CU250S-2 Control Unit ready for operation with installed firmware.Options for upgrading and downgrading the firmware can be found on the Internet: Firmware (/WW/news/en/67364620).The fieldbus interface of the Control Unit depends on the order number. The order number, the designation and the version of the hardware (e.g. 02) and firmware (e.g. 4.6) can be found on the rating plate ① of the Control Unit. Designation Order number FieldbusCU250S-2 6SL3246-0BA22-1BA0 USS, Modbus RTU CU250S-2 DP 6SL3246-0BA22-1PA0 PROFIBUSCU250S-2 PN 6SL3246-0BA22-1FA0 PROFINET, EtherNet/IP CU250S-2 CAN6SL3246-0BA22-1CA0CANopen● Compact Operating Instructions in German and English● The inverter contains open-source software (OSS). The OSS license terms are saved in the inverter.Transferring license terms of the OSS code to a PCProcedureTo transfer the OSS license terms from the inverter to a PC, proceed as follows: 1. Switch off the inverter power supply.2. Insert an empty memory card into the card slot of the inverter. Also see Section:Overview of the interfaces (Page 8)3. Switch on the inverter power supply.4. When you have switched on the power supply, wait 30 seconds.During this time, the inverter writes the "Read_OSS.ZIP" file onto the memory card. 5. Switch off the inverter power supply. 6. Remove the card from the inverter. 7. Use a card reader and load the file to a PC.You have then transferred the OSS license terms from the inverter to a PC.CU250S-2 Control UnitsInstalling33.1Snapping the Control Unit onto the Power ModuleInstalling the Control Unit on an IP20 Power ModuleProcedureProceed as follows to connect Power Modules and Control Units:1. Locate the lugs at the rear of the Control Unit in the matching recesses of the Power Module.2. Mount the Control Unit onto the Power Module so that it audibly snaps into place.The Power Module and the Control Unit are now connected with one another.To remove the Control Unit, press on the release button on the Power Module and withdraw the Control Unit.Permissible Power ModulesYou may operate the Control Unit with the following Power Modules: ● PM240 ● PM240-2 ● PM250 ● PM260 ● PM340 1AC3.2 Overview of the interfacesCU250S-2 Control Units3.2 Overview of the interfacesTo access the interfaces at the front of the Control Unit, you must unplug the Operator Panel (if one is being used) and open the front doors.① Terminal strips ② Fieldbus interfaceSelecting the fieldbus address: • PROFIBUS • USS • Modbus RTU •CanOpen③Status LED④ USB interface for connection to a PC⑤ No function. Keep the switch in the "Vector"position. ⑥Switch for analog inputsI0/4 mA … 20 mAU-10/0 V … 10 V⑦ Connection to the operator panel ⑧Memory card slot3.2 Overview of the interfacesCU250S-2 Control UnitsInterfaces at the lower side of the Control UnitTable 3- 1 Permissible encoders on the DRIVE-CLiQ interface X100The permissible combinations of encoders for speed control and position control are listed in the "Basic Positioner" Function Manual, see also: Manuals for the Control Unit (/WW/view/en/30563628/133300).3.3 Terminal blocksCU250S-2 Control Units3.3 Terminal blocksTerminal strips behind the upper front doorDifferent reference potentials:The terminals labelled "GND" are connected internally. "GND" and "GND IN" are not connected internally.Figure 3-1Interconnection example of the digital inputs with external 24 V power supplyInterconnecting the analog inputs (terminals 3, 4 and 10, 11)For the analog inputs, you may use the internal 10 V supply (example: terminals 1 … 4, 13) or an external supply (example: terminals 10, 11).If you use the internal 10 V supply, you must connect AI 0- or AI 1- to GND.3.3 Terminal blocks Optional 24 V supply (terminals 31, 32)Connection of the optional 24 V supply has the following advantages:● The Control Unit remains in operation after disconnection of the Power Module from theline supply. The Control Unit thus maintains the fieldbus communication, for example.● You can use terminals 51 … 54 as digital outputs.Use a power supply that provides an output voltage in accordance with SELV (Safety ExtraLow Voltage) or PELV (Protective Extra Low Voltage).If you use a common external power supply for terminals 31, 32 and the digital inputs, youmust connect GND to GND IN. Terminal strips behind the lower front doorDifferent reference potentials: The reference potentials of the digital inputs are not connected internally to each other or to GND. Figure 3-2 Interconnection example of the digital inputs with external 24 V power suppliesInterconnecting the reference potential of the digital inputsTable 3- 2Supply options for the digital inputs3.3 Terminal blocksFactory setting of the terminal stripsThe factory setting of the terminals depends on the Control Unit.Control Units with USS or CANopen interfaceThe fieldbus interface is not active.Figure 3-3 Factory setting of the CU250S-2 and CU250S-2 CAN Control Units3.3 Terminal blocksControl Units with PROFIBUS or PROFINET interfaceThe function of the fieldbus interface depends on DI 3.Figure 3-4 Factory setting of the CU250S-2 DP and CU250S-2 PN Control Units3.4 Operator panelsChanging the function of the terminalsThe function of the terminals marked in color in the two figures above, can be set.In order that you do not have to successively change terminal for terminal, several terminalscan be jointly set using default settings ("p0015 Macro drive unit").The factory settings of the terminals for USS/CANopen and PROFIBUS/PROFINETdescribed above correspond to the following default settings:●p0015 = 12 (setting in STARTER: "Standard I/O with analog setpoint")●p0015 = 7 (setting in STARTER: "Fieldbus with data set switchover")Further default settings can be found in the Operating Instructions, see also: Manuals for theControl Unit (/WW/view/en/30563628/133300).Wiring the terminal strip in compliance with EMC1.If you use shielded cables, then you must connect the shield to the mounting plate of thecontrol cabinet or with the shield support of the inverter through a good electricalconnection and a large surface area.See also: EMC installation guideline(/WW/view/en/60612658)e the shield connection plate (order number 6SL3264-1EA00-0LA0) of the Control Unitas strain relief.3.4Operator panelsThe Intelligent Operator Panel (IOP) is available for snapping on to the ControlUnit or as handheld with a connection cable to the Control Unit. The graphics-capable plain text display of the IOP enables intuitive operation and diagnosticsof the inverter.See also: Compatibility of the IOP and Control Units(/WW/view/en/67273266)The BOP-2 is an operator panel for snapping on to the Control Unit. The BOP-2has a two-line display for operation and diagnostics of the inverter.Further information can be found in the Operating Instructions of the BOP-2 and the IOP: Operator Panels (/WW/view/en/30563514/133300).Commissioning4Requirements for commissioningUse one of the PC tools STARTER or Startdrive to commissionthe inverter.You can access the inverter with STARTER or Startdrive eithervia a USB connection or via the fieldbus.System requirements and download:• STARTER(/WW/view/en/26233208)• Startdrive(/WW/view/en/88851265) Help for the operation and for the functions of the commissioning tools:● STARTER videos (/mcms/mc-drives/en/low-voltage-inverter/sinamics-g120/videos/Pages/videos.aspx )● Startdrive tutorial (/WW/view/en/73598459)Commissioning with STARTER is described in the following.4.1 Commissioning with STARTERCreating a STARTER projectProcedureIn order to create a new project, proceed as follows:1. In the STARTER menu, select "Project" → "New…".2. Specify a name of your choice for the project.You have created a new STARTER project.4.1 Commissioning with STARTERTransferring inverters connected via USB to the projectProcedureProceed as follows to transfer an inverter connected via USB to your project:1.Switch on the inverter power supply.2.First insert a USB cable into your PC and then into the inverter.3.The PC operating system installs the USB driver when you are connecting the inverterand PC together for the first time.–Windows 7 installs the driver automatically.–For Windows XP you must acknowledge several system messages.4.Start the STARTER commissioning software.5.In STARTER, press the ("Accessible nodes") button.6.When the USB interface is appropriately set, then the "Accessible nodes" screen formshows the inverters that can be accessed.If you have not correctly set the USB interface, then the following "No additional nodesfound" message is displayed. In this case, follow the description below.7.Select the inverter ☑.8.Press the "Accept" button.You have transferred an inverter accessible via the USB interface into your project.4.1 Commissioning with STARTER Setting the USB interfaceProcedureProceed as follows to set the USB interface in STARTER:1.In this case set the "Access point" to "DEVICE (STARTER, Scout)" and the "PG/PCinterface" to "S7USB".2.Press the "Update" button.You have set the USB interface.STARTER now shows the inverters connected via USB.Starting the configurationProcedureTo start the configuration, proceed as follows:1.In STARTER select the drive you wish to commission.2.Start the wizard for the device configuration:You have started the configuration.4.1 Commissioning with STARTERPerforming the configurationFollow the steps of the configuration wizard and enter the data ofyour application.Loading the configured data into the driveProcedureProceed as follows to load the configured data into the drive:1. Select your project and go online: .2. STARTER compares your configuration with the real inverter. STARTER signals anydifferences in the "Online/offline comparison".Acknowledge the message by pressing the "Load HW configuration to PG" button.3. Open "Drive Navigator".4. Select the "Commissioning" button.5.Click on "Load data to the drive".6. ☑ In the screen form, select "After loading copy RAM to ROM".7. Load your configuration into the inverter.8. Close the "Commissioning" screen form.You have loaded your configuration into the drive and therefore performed the basiccommissioning.Identifying motor dataRequirements● In the basic commissioning, you have selected the motor identification (MOT ID). In thiscase, after the basic commissioning has been completed, the inverter issues the alarmA07991.● The motor has cooled down to the ambient temperature.If the motor is too hot, the motor data identification will provide incorrect values and thevector control will become unstable.4.1 Commissioning with STARTERDANGERRisk of injury or material damage as a result of machine movements when switching on themotorSwitching on the motor for identification purposes may result in hazardous machinemovements.Secure dangerous machine parts before starting motor data identification:•Before switching on, check that no parts are loose on the machine or can be spun out.•Before switching on, ensure that nobody is working on the machine or located within its working area.•Secure the machine's work area against unintended access.•Lower hanging/suspended loads to the floor.ProcedureTo initiate motor data identification and optimizationof the motor control, proceed as follows:1.Open by double-clicking on the control panel inSTARTER.2.Assume master control for the inverter.3.Set the "Enable signals"4.Switch on the motor.The inverter starts the motor data identification.This measurement can take several minutes.After the measurement, the inverter switches offthe motor.5.Relinquish the master control after the motor dataidentification.6.Click the Save (RAM to ROM) button.You have now completed motor data identification.Self-optimization of the closed-loop controlIf you have also selected a rotating measurement with self-optimization of the vector controlin addition to the motor data identification, then you must switch on the motor again asdescribed above and wait for the optimization run to be completed.4.2 Connecting the inverter to the fieldbus4.2Connecting the inverter to the fieldbusWhere can I find instructions for the fieldbus connection of the inverter?You can find instructions for the fieldbus connection on the Internet:●Application examples (/WW/view/en/60733299)●Operating Instructions, "Inverter with CU250S-2 Control Units": Manuals for the ControlUnit (/WW/view/en/30563628/133300)●Function Manual, "Fieldbusses": Manuals for the Control Unit(/WW/view/en/30563628/133300)Example telegramThe inverter telegrams without configured basic positioner are described in the OperatingInstructions and in the "Communications" Function Manual: Manuals for the Control Unit(/WW/view/en/30563628/133300)The telegrams with configured basic positioner are described in the "Basic Positioner andTechnology" Function Manual: Manuals for the Control Unit(/WW/view/en/30563628/133300).Control word 1 (STW1)4.2 Connecting the inverter to the fieldbusStatus word 1 (ZSW1)4.3 Frequently required parametersDescription files for fieldbusesThe description files are electronic device data sheets which contain all the requiredinformation of a higher-level controller. You can configure and operate the inverter on afieldbus with the appropriate description file.4.3Frequently required parameters4.3 Frequently required parameters4.3 Frequently required parametersMore information 5 5.1Manuals for your inverterDocumentation on DVDSINAMICS Manual Collection, order number 6SL3097-4CA00-0YG0Table 5- 1 Manuals for your inverter for downloadMore information5.2 Product support5.2Product support Table 5- 2 Technical support。
西门子840d 840d sl手册说明书
MANUAL OPERATION44-9 ATC4-9-1 Operation1.Names and functions of the menu items concernedThere are three menus provided for ATC operation: ATC first menu and ATC second menu.Select the required one from among the menu items described below.2.Displaying the menus requiredWhen performing ATC operation in a manual operation mode, press the machine menu keyon the NC operating panel to display the machine menu.<Machine menu>SET UPOPTIONBARRIER CANCELTURNING SPINDLEMILLING SPINDLEMAINTE-NANCE C AXIS INT-LOCKCANCELFRONT DOOR OPENFRONT DOOR CLOSE(1) Press the display selector key [3]. The following menu will be displayed.ATC SHIFTER MAGAZINE 80/120TOOL MAGAZINE B AXIS &TAIL HOMESETLOWER-TR MODE1. Select the [ATC SHIFTER MAGAZINE] item to display the following menu for manual ATCoperation.<ATC first menu>ATC ARM BASEPOSITIONATC ARM SWINGATC ARM TURNMILL ATC ORIENTATC ARM JOG CWATC ARM JOG CCW ATC ARM HOME SET MODE ATC ARM HOME SET AXIS ATC POS.ATC INT-LOCKCANCEL123456789102. Press the menu selector key [4] from the ATC first menu to display the following ATCsecond menu.<ATC second menu>SHIFTER EXIT SHIFTER RETRACT SHIFTER ATC SIDE SHIFTER MAG.SIDEGRIPPER UNCLAMP MAGAZINE HOME SETMODE MAGAZINEHOME SET111213141516171819204MANUAL OPERATIONA. ATC first menuNo.Function name Description1ATC ARM BASEPOSITIONThis function moves the ATC arm to its stand-by position.Conditions:Shifter at ATC position, retraction in Z-axis direction, X-/Y-axis at ATCposition, Z-axis at zero-point position, milling head and B-axisclamped, milling spindle at orientation position, milling spindleclamped, and tool clamped.2ATC ARM SWING This function swings the ATC arm in for a gripping of the tools in both the milling head and the shifter.Conditions:Same as for item 1 above.3ATC ARM TURN This function rotates and extends/retracts the ATC arm for a tool change. Conditions:ATC arm swinging-in completed and tool unclamped.4MILL ATC ORIENT This function turns the milling spindle to its ATC position. To perform ATC operations, clamp the milling spindle at this position.5ATC ARM JOG CW The function described in the menu item No. 6 is executed in series in reverse order.Conditions:Same as for items 1, 2, and 3 above.6ATC ARM JOG CCW The function described in the above menu items Nos. 1, 2, and 3 is executed in series in this order. This menu key is used during centering or other machine adjustments to move the ATC arm at the restricted jogging speed.Conditions:Same as for items 1, 2, and 3 above.7ATC ARM HOME SETMODEThis menu key functions for setting the reference position only and is usually notused. This menu function sets the ATC arm zero-point position setting mode.8ATC ARM HOME SET This menu key functions for setting the reference position only and is usually not used. This menu function initializes the ATC arm to its reference position.9AXIS ATC POS.This function moves the X-axis, Z-axis, and Y-axis to an ATC-enabling position. (Yt-axis at ATC position, X-axis at ATC position, and Z-axis at ATC position.)Conditions:No interference must occur during axis movement.10ATC INT-LOCKCANCELVarious interlocks are employed for each ATC operation for safety purpose. Thisfunction neglects interlocks.(Pressing the menu key lights up this menu itemdisplay.)*On completion of operation, the menu items will be highlighted.B. ATC second menuNo.Function name Description11SHIFTER EXIT This function extracts the tool shifter to grasp the tool in the gripper.Conditions:Stopped at magazine indexed position, shifter on magazine or ATC side12SHIFTER RETRACT This function retracts the tool shifter to return the tool to the gripper. Conditions:Shifter on magazine or ATC side.13SHIFTER ATC SIDE This function moves the tool shifter to the ATC side.Conditions:Shifter extracted, ATC arm stopped at reference position.14SHIFTER MAG. SIDE This function moves the tool shifter to the magazine side. Conditions:Shifter extracted, no tool present in indexed gripper.16GRIPPER UNCLAMP This function unclamps the magazine and makes it rotatable.17MAGAZINE HOMESET MODEThis menu key functions for setting the reference position only and is usually notused. This menu function sets the magazine zero-point position setting mode.18MAGAZINE HOMESETThis menu key functions for setting the reference position only and is usually notused. This menu function initializes the magazine to its reference position.MANUAL OPERATION43. Setting tool numberAfter a manual tool change operation, follow the procedure below as required to set the number of the tool currently mounted on the upper turret in the MDI mode .(1) Press the MDI key[21] to change the mode to MDI.TOOL SELECTTOOL CHANGEM CODET MSR AUTOT MSR SEMIAUTO MSR UNIT IN MSR UNIT OUT(2) When the following is displayed, press the menu selector key [4] to display the followingmenu.SP.TOOL No.SET NXT TOOL No.SET(3) Press the [SP. TOOL No. SET] menu key. The message TOOL NUMBER? will bedisplayed. Input the number of the tool currently mounted on the upper turret.5PREPARATION FOR MACHINING5-5 UsefulInformationThis section gives useful information about the operations that should be understood for theoptimum use of the machine and an enhanced productive efficiency, together with a descriptionof the relevant NC functions.5-5-1 ATC STOP functionThis menu function refers to a stop of the automatic operation just before an ATC cycle, or amilling head indexing for changing the application direction of the tool. Upon completion of thepreparatory axis movement of the milling head to the tool change position, the operation willcome to a stop to suspend the ATC cycle or milling head indexing.If the [ATC STOP] menu function is already selected, the machine will stop before ATC cycle ormilling head indexing.1. Machine actions to be held upThe ATC STOP function allows the following action to be held up in the flow of operation:ATC cycleThe ATC cycle here refers to changing the current tool on the upper turret for a tool to be used inthe next machining process. In addition to the main action of tool change by the ATC arm, anATC cycle includes the indexing of the upper turret, if required, from position V to position H andvice versa.2. Operating procedurePress the MDI key on the NC operating panel to display the MDI menu.TOOL SELECTTOOLCHANGEM CODE T MSRAUTOT MSRSEMIAUTOMSR UNITINMSR UNITOUT(1) Press the menu selector key [4] 2 times.MST LOCKATCSTOPZ AXISCANCELUPPERTUROPTIONALSTOPDRYRUN MACHINELOCKWORKLIGHT1. Pressing the [ATC STOP] menu key alternately makes the function valid and invalid.The highlighted display of the menu item refers to the validation.2. Upon completion of the axis movement of the upper turret to the tool change position, theautomatic operation comes to a stop with the message 238: AUTO TOOL CHANGE STOP displayed on the screen. The cycle start lamp is not turned off by this stop.3. Press the [ATC STOP] menu key (to cancel the highlighted display) and then press thecycle start button to resume running the machine. The above-mentioned message will disappear and the automatic operation will be restarted from the suspended ATC cycle.PREPARATION FOR MACHINING55-5-2 Recovery from an ATC operation halfway stoppedThis subsection describes the recovery of normal status from an ATC-related operation halfway stopped by an NC resetting, an emergency stop, a power failure, an alarm, etc.First see Item 1 and confirm the particular abortion position of the ATC operation by visual checking and by displaying the ATC menus.Next, confirm the reference positions of the 20/40-tool magazine in Item 2 or those of the 80/120-tool magazine in Item 4, and recover normal conditions as directed in Item 3 or Item 5.Refer to Section 4-9, “ATC”, for the details of the respective menu functions.CAUTION! Pay special careful attention to safety and interference.1.Abortion positions of the ATC operationWARNING! After recovering ATC conditions in manual operation mode, confirm the corresponding tool data and the actual magazine pocket number and tool number. Failure to perform the confirmation leads to a serious accident.A. Recovering the 20/40-tool magazine- Halfway stop of the shifter pocket during motion on the ATC side - Halfway stop of the shifter pocket during motion on the magazine side - Halfway stop of the shifter pocket during motion between magazine and ATC - Halfway stop of the ATC arm during swing - Halfway stop of the ATC arm during rotation- Halfway stop of the ATC arm during return to stand-by position B. Recovering the 80/120-tool magazine - Halfway stop of the carrier motion - Halfway stop of the shifter motion - Halfway stop of the ATC arm during swing - Halfway stop of the ATC arm during rotation- Halfway stop of the ATC arm during return to stand-by position5 PREPARATION FOR MACHINING2.Reference position of the 20/40-tool magazine A. Schematic diagram of ATC cycleFig. 5-13 Schematic diagram of ATC cycleB. ATC menusThe asterisk (∗) mark signifies the reference position.Press the machine menu keyon the NC operating panel in manual operation mode and press the display selector key [3]. The following menu will be displayed.ATC SHIFTER MAGAZINE 80/120TOOL MAGAZINE B AXIS &TAIL HOMESETLOWER-TR MODESelect the [ATC SHIFTER MAGAZINE] item to display the following menu for manual ATC operation.<ATC first menu>ATC ARM BASEPOSITIONATC ARM SWINGATC ARM TURNMILL ATC ORIENTATC ARM JOG CWATC ARM JOG CCW ATC ARM HOME SET MODE ATC ARM HOME SET AXIS ATC POSATC INT-LOCKCANCEL∗∗Press the menu selector key [4] from the ATC first menu to display the following ATC secondmenu.PREPARATION FOR MACHINING5 <ATC second menu>SHIFTER EXIT SHIFTERRETRACTSHIFTERATC SIDESHIFTERMAG.SIDEGRIPPERUNCLAMPMAGAZINEHOME SETMODEMAGAZINEHOMESET ∗∗3. Recovering the 20/40-tool magazineA. For halfway stop of the shifter pocket during motion on the ATC side(1) Press the emergency stop button, turn it in the direction of arrow and then press the RESETkey.(2) Press the zero-point return key.(3) Display the ATC menu by pressing the machine menu key and the display selectorkey [3]in succession. Select the [ATC SHIFTER MAGAZINE] item and press the menuselector key [4].(4) Highlight the [SHIFTER RETRACT] item of the ATC second menu by pressing the menukey.(5) Check the tool number of the tool in the shifter pocket and, if required, rotate the magazine(using the forward or reverse button on the magazine operating panel) to index themagazine pocket for that tool.(6) Make the [GRIPPER UNCLAMP] item display of the ATC second menu in normal status bypressing the menu key.(7) Highlight the [SHIFTER EXIT] item of the ATC second menu by pressing the menu key.(8) Highlight the [SHIFTER MAG. SIDE] item of the ATC second menu by pressing the menukey.(9) Highlight the [SHIFTER RETRACT] item of the ATC second menu by pressing the menukey.(10) Perform zero-point return operation for the X- and Y-axes.Check the B-axis indication on the POSITION display whether it is 0° as appropriate, andperform the required B-axis positioning by pressing the tool on the upper turret selectorbutton [38].If the MAGZN PK No. on the POSITION display is “0” (magazine rotation stopped halfway),index the magazine to a correct position and make sure that the MAGZN PK No. indicationcorresponds with the currently indexed pocket.(11) Verify that the menu items of the reference positions in the ATC menu are highlighted.(12) Close the menu by pressing the key.(13) Make sure that the TNo. (tool number) on the POSITION display and the current tool match.If they mismatch, correct the tool number referring to Section 4-9.(14) Make sure that the NEXT TOOL No. on the POSITION display is “0”. If not, press the MDIkey, and enter “0” by using the [NXT TOOL No. SET] item.(15) Press the zero-point return key.5PREPARATION FOR MACHININGB. For halfway stop of the shifter pocket during motion on the magazine side(1) Perform steps (1) to (3) of the procedure described above under A.(2) Perform steps (9) to (15) of the procedure described above under A.C. For halfway stop of the shifter pocket during motion between magazine and ATC(1) Perform steps (1) to (3) of the procedure laid down in Item A above.(2) Highlight the [SHIFTER ATC SIDE] item of the ATC second menu by pressing the menukey.(3) Perform steps (4) to (15) of the procedure laid down in Item A above.D. For halfway stop of the ATC arm during swing(1) Perform steps (1) to (3) of the procedure described above under A.(2) Highlight the [ATC ARM HOME SET] item of the ATC menu by pressing the menu key.Use the [ATC INT-LOCK CANCEL] menu function as required to carry out this step.(3) Perform steps (5) to (15) of the procedure described above under A.E. For halfway stop of the ATC arm during rotation(1) Perform steps (1) to (3) of the procedure described above under A.(2) Press the [ATC INT-LOCK CANCEL] menu key of the ATC first menu and then set the toolclamp/unclamp switch [42] on the operating panel to the position.(3) Highlight the [ATC ARM TURN] item of the ATC first menu by pressing the menu key.(4) Set the tool clamp/unclamp switch [42] on the operating panel to the position.(5) Highlight the [ATC ARM HOME SET] item of the ATC first menu by pressing the menu key.(6) Since the tool number of the mounted tool is not correct, be sure to correct the TNo. on thePOSITION display as follows.(7) Perform steps (5) to (15) of the procedure described above under A.F. For halfway stop of the ATC arm during return to stand-by position(1) Perform steps (1) to (3) of the procedure described above under A.(2) Highlight the [ATC ARM HOME SET] item of the ATC first menu by pressing the menu key.Use the [ATC INT-LOCK CANCEL] menu function as required to carry out this step.(3) Since the tool number of the mounted tool is not correct, be sure to correct the TNo. on thePOSITION display as follows.(4) Perform steps (5) to (15) of the procedure described above under A.PREPARATION FOR MACHINING54. Reference position of the 80/120-tool magazine A. Schematic diagram of ATC cycleATC armF ig. 5-14 Schematic diagram of ATC cycleB. ATC menusThe asterisk (∗) mark signifies the reference position.Press the machine menu keyon the NC operating panel in manual operation mode and press the display selector key[3]. The following menu will be displayed.ATC SHIFTER MAGAZINE 80/120TOOL MAGAZINE B AXIS &TAIL HOMESETLOWER-TR MODESelect the [ATC SHIFTER MAGAZINE] item to display the following menu for manual ATC operation.<ATC first menu>ATC ARM BASEPOSITIONATC ARM SWINGATC ARM TURNMILL ATC ORIENTATC ARM JOG CWATC ARM JOG CCW ATC ARM HOME SET MODE ATC ARM HOME SET AXIS ATC POSATC INT-LOCKCANCEL∗∗5PREPARATION FOR MACHININGPress the menu selector key [4]from the ATC first menu to display the following ATC secondmenu.<ATC second menu>SHIFTER EXIT SHIFTERRETRACTSHIFTERATC SIDESHIFTERMAG.SIDEGRIPPERUNCLAMPMAGAZINEHOME SETMODEMAGAZINEHOMESET ∗∗5. Recovering the 80/120-tool magazineA. For halfway stop of the tool carrier motion(1) Press the emergency stop button, turn it in the direction of arrow and then press the RESETkey.(2) Press the zero-point return key.(3) Display the ATC menu by pressing the machine menu key and the display selectorkey [3]in succession. Select the [ATC SHIFTER MAGAZINE] item and press the menuselector key [4].(4) Set the manual intervention switch [2] of the magazine manual operations box to I and thenpress the CARRIER switch [7] to activate the switch lamp.(5) Select station No. 1 (tool carrier stand-by position) using the STATION switch [10] of themagazine manual operations box and then press the START switch [8] to move the toolcarrier to its stand-by position (at this time, the shifter must have been located at its stand-by position before the tool carrier can be operated).(6) Check the tool number of the tool mounted in the carrier pocket, and if this tool number doesnot match the magazine number, rotate the magazine by pressing the forward or reversebutton ([4] or [5]) of the magazine manual operations box (when rotating the magazine,make sure that the CARRIER switch lamp [7] and the SHIFTER switch lamp [6] are off).(7) Press the SHIFTER switch [6] of the magazine manual operations box to turn on the switchlamp.(8) Select station No. 4 using the STATION switch [10] of the magazine manual operations boxand then press the START switch [8] to return the tool to the magazine.When station No. 4 is selected, the shifter will continuously perform “tool removal fromcarrier”, “tool returning to magazine”, “and returning to stand-by position”, in that order.(9) Perform zero-point return operation for the X- and Y-axes.Check the B-axis indication on the POSITION display whether it is 0° as appropriate, andperform the required B-axis positioning by pressing the tool on the upper turret selectorbutton [38].If the MAGZN PK No. on the POSITION display is “0” (magazine rotation stopped halfway),index the magazine to a correct position and make sure that the MAGZN PK No. indicationcorresponds with the currently indexed pocket.(10) Verify that the menu items of the reference positions in the ATC menu are highlighted.(11) Close the menu by pressing the key.(12) Make sure that the TNo. (tool number) on the POSITION display and the current tool match.If they mismatch, correct the tool number referring to Section 4-9.PREPARATION FOR MACHINING 55-21(13) Make sure that the NEXT TOOL No. on the POSITIONdisplay is “0”. If not, press the MDIkey, and enter “0” by using the [NXT TOOL No. SET] item.(14) Press the zero-point return key.B. For halfway stop of the shifter motion(1) Perform steps (1) and (3) of the procedure described above under A.(2) Set the manual intervention switch [2] of the magazine manual operations box to I and thenpress the SHIFTER switch [6] to activate the switch lamp.(3) Perform steps (8) to (14) of the procedure described above under A.C. For halfway stop of the ATC arm during swing(1) Perform steps (1) and (3) of the procedure described above under A.(2) Highlight the [ATC ARM HOME SET] item of the ATC first menu by pressing the menu key.Use the [ATC INT-LOCK CANCEL] menu function as required to carry out this step.(3) Perform steps (8) to (14) of the procedure described above under A. D. For halfway stop of the ATC arm during rotation(1) Perform steps (1) and (3) of the procedure described above under A.(2) Press the [ATC INT-LOCK CANCEL] menu key of the ATC first menu and then set the toolclamp/unclamp switch [42] on the operating panel to the position.(3) Highlight the [ATC ARM TURN] item of the ATC first menu by pressing the menu key.(4) Highlight the [ATC ARM SWING] item of the ATC first menu by pressing the menu key.(5) Set the tool clamp/unclamp switch [42] on the operating panel to the position.(6) Highlight the [ATC ARM HOME SET] item of the ATC first menu by pressing the menu key.(7) Since the tool number of the mounted tool is not correct, be sure to correct the TNo. on thePOSITION display as follows.(8) Perform steps (8) to (14) of the procedure described above under A.E. For halfway stop of the ATC arm during return to stand-by position(1) Perform steps (1) and (3) of the procedure described above under A.(2) Highlight the [ATC ARM HOME SET] item of the ATC first menu by pressing the menu key.Use the [ATC INT-LOCK CANCEL] menu function as required to carry out this step.(3) Since the tool number of the mounted tool is not correct, be sure to correct the TNo. on thePOSITION display as follows.(4) Perform steps (8) to (14) of the procedure described above under A.。
西门子S介绍

主 一、PLC基本知识介绍 要 二、PLC的工作方式
三、西门子S七-二00的硬件组成
内 四、西门子S七-二00的通信协议 五、西门子S七-二00的硬件设计
容 六、西门子S七-二00编程调试
MPI协议 只能作从站
MPI 方式
S七-二00 CN 可以通 过内置接口连接到 MPI 网络上,波特率 一九.二k/一八七.五 kbit /s.它可与S七三00/S七-四00 CPU 进行通讯.S七 -二00 CN CPU 在 MPI 网络中作为从 站,它们彼此间不能 通讯.
自由口模式 由用户自定义的通讯协议
PLC软件编程与调试
一、编程软件的安装; 二、弄清工艺过程; 三、明确输入输出接口; 四、编程、下载、调试; 五、程序定型与存档; 六、程序改进与完善;
PLC编程、调试——软件安装
S七-二00编程Байду номын сангаас件
STEP_七-MicroWIN_V四_SP四
运行环境
Windows 二000 SP三 以上 Windows XP Home Windows XP Professional 西门子没有在其他操作系统下测试,不保证能够使用.
主 一、PLC基本知识介绍 要 二、PLC的工作方式
三、西门子S七-二00的硬件组成
内 四、西门子S七-二00的通信协议 容 五、西门子S七-二00的硬件设计
六、西门子S七-二00编程调试
PLC的工作方式
循环扫描的工作方式 扫描周期一般也就是几毫秒、 几十毫秒,最多也不会超过一00到二00毫秒.
实现功能
信号采集功能 可采集开关信号、模拟信号及脉冲信号. 输出控制功能 可控制输出开关信号、模拟信号及脉冲信号[脉冲链或
西门子802S数控系统常见故障及其维修
西门子802S数控系统常见故障及其维修.(1)--------------------------------------------------------------------------------802S是西门子公司推出的一种经济性数控系统.通过步进驱器驱动西门子五相步进电机.在实际使用中经常会出现以下故障.1.显示屏故障.802S的显示屏防污措施做不好,就会损坏,有条纹,显示不清.解决措施:只有更换显示屏并做好防污措施.2.连接故障.802S主系统和显示电路板之间的信号线有时连接不好,在开机时显示屏会显示蓝屏并提示:操作面板连接故障关机并重启.解决措施:重新插好信号线,也可更换信号线.3.回零不准. 回零不准主要和行程开关光电开关及回零参数三方面有关. 一般以行程开关损坏最常见.回零相关参数为34040,34070,34020,MD14512,MD34060.4.用户数据丢失.可安操作步骤将系统自备份数据装入.如果系统自备份数据又丢失,那就比较麻烦了,如果用户自已没有备份数据的话,那只有重新编辑梯形图及重新设定参数了.还要检查系统硬件是否有故障.5.步进电机丢步.步进电机丢步表现为加工零部件尺寸不对.排除机械故障后,常见为步进电机和步进驱动器故障.采用交换法很容易排除故障.6.系统硬件故障.A.电源模块故障.电源模块有故障可通过模块上红灯是否亮或测量是否有+24V电压输出判定其是否有故障.如有故障只有请更专业的技术人员修理或更换.切忌胡乱拆卸电子元件,往往容易使问题扩大.B.系统模块故障.系统模块常为和电源连接的一个电路板发生故障.表现为系统不启动.可通过观察和测量发现故障.如有故障只有请更专业的技术人员修理或更换.切忌胡乱拆卸电子元件,以防问题扩大.随着中国工业的发展企业对数控机床的需要越来越多.在国家产业政策支持下,国内企业研发数控机床能力有了一定的提高.但与国外相比还是有很大的差距.特别是数控机床的一些关键零部件全部依赖进口.中国企业只是一个为国外企业打工的组装厂.大部分利润被国外企业赚取.中国企业只赚取少的可怜组装费.没能有足够的经费投入研发.形成恶性循环.面对国外企业和国内独资及合资企业的竞争,中国企业生存空间有限.一但国外对中国全面封锁,倒下去的不只是生产数控机床的企业,而是整个中国的制造业!!!!应该把这个问题提高到关系国家安全的战略高度,国家要重视,更重要是我们整个制造业的同仁们要共同努力奋斗!!数控车床加工编程典型实例分析(西门子802S数控系统)这是一篇带有教学色彩的习作,文章对数控编程的方式和步骤进行了简明的阐述,并针对一个典型零件的数控车削加工给出了一套程序。
西门子 NXGPro+ 控制系统手册_操作手册说明书
3.4
单元通讯的协议 ............................................................................................................ 36
3.5
NXGpro+ 高级安全 .......................................................................................................37
3.2
功率拓扑 ......................................................................................................................34
3.3
控制系统概述 ...............................................................................................................35
NXGPro+ 控制系统手册
NXGPro+ 控制系统手册
操作手册
AC
A5E50491925J
安全性信息
1
安全注意事项
2
控制系统简介
3
NXGPro+ 控制系统简介
4
硬件用户界面说明
5
参数配置/地址
6
运行控制系统
7
高级的操作功能
8
软件用户界面
9
运行软件
10
故障和报警检修
11
西门子802S操作说明

.西门子802s/c系统操作篇NC 键盘区(左侧):机床控制面板区域(右侧):1.1 屏幕划分符号说明屏幕中的缩略符分别具有如下含义:表 1-1 符号说明(1)当前操作区域(2)程序状态(3)运行方式图中元素缩略符含义MA 加工PA 参数PR 程序DI 通讯DG 诊断STOP 程序停止RUN 程序运行RESET 程序复位JOG 点动方式MDA 手动输入,自动执行AUTO 自动方式表 1-1 符号说明(续)图中元素缩略符含义SKP 程序段跳跃跳步的程序段在其段号之前用一斜线示,这些程序段在程序运行时跳过不执行。
DRY 空运行轴在运行时将执行设定数据“空运行进给率”中规定的进给值。
ROV 快速修调修调开关对于快速进给也生效。
(4)状态显示SBL单段运行此功能生效时零件程序按如下方式逐段运行:每个程序段逐段解码,在程序段结束时有一暂停,但在没有空运行进给的螺纹程序段时为一例外,在此只有螺纹程序段运行结束后才会产生一暂停。
SBL 功能只有处于程序复位状态时才可以选择。
M1程序停止此功能生效时程序运行到有 M01 指令的程序段时停止运行。
此时屏幕上显示“停止 M00/M01有效”。
PRT程序测试(无指令给驱动)1_1000INC步进增量系统处于 JOG 运行方式时不显示程序控制而是显示所选择的步进增量。
开机和回参考点 2操作步骤第一步,接通 CNC 和机床电源。
系统引导以后进入“加工”操作区 JOG 运行方式。
出现“回参考点”窗口。
3 参数设定在 CNC 进行工作之前,必须通过参数的输入和修改对机床、刀具等进行调整:输入刀具参数及刀具补偿参数输入/修改零点偏置输入设定数据3.1输入刀具参数及刀具补偿参数—“参数”操作区功能刀具参数包括刀具几何参数、磨损量参数和刀具型号参数。
不同类型的刀具均有一个确定的参数数量。
每个刀具有一个刀具号(T 号)。
参见章节8.6“刀具和刀具补偿”。
参数设定软键选择接下去渐低的或渐高的刀沿号选择接下去渐低的或渐高的刀具号计算刀具长度补偿值用“扩展键”扩展软键功能所有的刀具补偿值复位为零建立一个新的刀沿,设立刀补参数。
西门子S操作说明

西门子802s/c系统操作篇NC 键盘区(左侧):机床控制面板区域(右侧):屏幕划分符号说明屏幕中的缩略符分别具有如下含义:表 1-1 符号说明(1)当前操作区域(2)程序状态(3)运行方式图中元素缩略符含义MA 加工PA 参数PR 程序DI 通讯DG 诊断STOP 程序停止RESET 程序复位JOG 点动方式MDA 手动输入,自动执行AUTO 自动方式表 1-1 符号说明(续)图中元素缩略符含义SKP 程序段跳跃跳步的程序段在其段号之前用一斜线示,这些程序段在程序运行时跳过不执行。
DRY 空运行轴在运行时将执行设定数据“空运行进给率”中规定的进给值。
ROV 快速修调修调开关对于快速进给也生效。
(4)状态显示SBL单段运行此功能生效时零件程序按如下方式逐段运行:每个程序段逐段解码,在程序段结束时有一暂停,但在没有空运行进给的螺纹程序段时为一例外,在此只有螺纹程序段运行结束后才会产生一暂停。
SBL 功能只有处于程序复位状态时才可以选择。
M1程序停止此功能生效时程序运行到有 M01 指令的程序段时停止运行。
此时屏幕上显示“停止 M00/M01 有效”。
PRT程序测试(无指令给驱动)1_1000INC步进增量系统处于 JOG 运行方式时不显示程序控制而是显示所选择的步进增量。
开机和回参考点 2操作步骤第一步,接通 CNC 和机床电源。
系统引导以后进入“加工”操作区 JOG 运行方式。
出现“回参考点”窗口。
3 参数设定在 CNC 进行工作之前,必须通过参数的输入和修改对机床、刀具等进行调整:输入刀具参数及刀具补偿参数输入/修改零点偏置输入设定数据输入刀具参数及刀具补偿参数—“参数”操作区功能刀具参数包括刀具几何参数、磨损量参数和刀具型号参数。
不同类型的刀具均有一个确定的参数数量。
每个刀具有一个刀具号(T 号)。
参见章节“刀具和刀具补偿”。
参数设定软键选择接下去渐低的或渐高的刀沿号选择接下去渐低的或渐高的刀具号计算刀具长度补偿值用“扩展键”扩展软键功能所有的刀具补偿值复位为零新刀补建立到当前刀具上,并自动分配下一个刀沿号(D1-D9)。
西门子PLC维护指南简介
西门子PLC维护指南简介西门子PLC是控制系统中必不可少的模块,它的正常稳定运行非常重要,能保证整套控制系统稳定可靠的运转。
为了保证西门子PLC的正常运行,工程师需要定期对西门子PLC进行维护,本文下面针对西门子PLC的维护方法做一个介绍,为用户在维护过程中进行参考。
西门子PLC维护方法(一)、保养规程、设备定期测试、调整规定1、每半年或季度检查PLC柜中接线端子的连接情况,若发现松动的地方及时重新坚固连接;2、对柜中给主机供电的电源每月重新测量工作电压;(二)、设备定期清扫的规定1、每六个月或季度对PLC进行清扫,切断给PLC供电的电源把电源机架、CPU主板及输入/输出板依次拆下,进行吹扫、清扫后再依次原位安装好,将全部连接恢复后送电并启动PLC主机。
认真清扫PLC箱内卫生;2、每三个月更换电源机架下方过滤网;(三)、检修前准备、检修规程1、检修前准备好工具;2、为保障元件的功能不出故障及模板不损坏,必须用保护装置及认真作防静电准备工作;3、检修前与调度和操作工联系好,需挂检修牌处挂好检修牌;(四)、设备拆装顺序及方法1、停机检修,必须两个人以上监护操作;2、把CPU前面板上的方式选择开关从“运行”转到“停”位置;3、关闭PLC供电的总电源,然后关闭其它给模坂供电的电源;4、把与电源架相连的电源线记清线号及连接位置后拆下,然后拆下电源机架与机柜相连的螺丝,电源机架就可拆下;5、CPU主板及I/0板可在旋转模板下方的螺丝后拆下;6、安装时以相反顺序进行(五)、检修工艺及技术要求1、测量电压时,要用数字电压表或精度为1%的万能表测量2、电源机架,CPU主板都只能在主电源切断时取下;3、在RAM模块从CPU取下或插入CPU之前,要断开PC的电源,这样才能保证数据不混乱;4、在取下RAM模块之前,检查一下模块电池是否正常工作,如果电池故障灯亮时取下模块PAM内容将丢失;p;5、输入/输出板取下前也应先关掉总电源,但如果生产需要时I/0板也可在可编程控制器运行时取下,但CPU板上的QVZ(超时)灯亮;956、拨插模板时,要格外小心,轻拿轻放,并运离产生静电的物品;7、更换元件不得带电操作;;8、检修后模板安装一定要安插到位;北京天拓四方科技有限公司。
西门子 SMIATIC-S7 控制系统智能以太网通信处理器SCANET-S7用户手册说明书

西门子SMIATIC-S7控制系统智能以太网通信处理器SCANET-S7用户手册SCANET_UM_CN2016071.前言工业网络通讯技术是制造业实现工业4.0的基础。
在国务院印发的《中国制造2025》发展规划中已经明确了加快推动新一代信息技术与制造技术的融合发展。
当前,各级政府部门也正在大力推动两化融合(信息化和工业化的高层次深度结合),许多传统制造业的龙头企业都在积极构建智能生产信息化系统和工业大数据分析,通过信息化改造来提升生产管理水平和产品质量,可以说我国的制造业当前正在经历一个脱胎换骨的发展。
工业制造业的数据基本上由两类构成,一是人工产生的数据,二是机器自动产生的数据。
在智能生产环节,我们将更多的关注机器自动产生的数据,因此构建生产信息化系统就离不开设备联网和数据采集。
西门子SIMATIC自动化控制系统在工业控制市场应用相当广泛,凭借其安全可靠性、全集成产品线和优异的功能获得了国内外制造业用户的高度评价,在过去的20年自动化高速发展期,每年都有近百万台的SIMATIC设备应用到各行各业的制造业生产车间。
但是我们考虑将这些设备接入信息化系统时将面临几个现实的问题:1.这些控制系统在构建初期并没有考虑到现在的信息化联网需求,因此绝大多数系统并没有集成工业以太网通讯接口,要实现数据采集就需要在现有控制系统上增加额外的以太网通讯接口。
2.采用西门子的以太网通讯接口模块是一种解决方案,但问题在于在硬件和软件上都需要重新去配置控制系统,也就是说需要设备制造商来完成这些工作,仅仅靠设备使用厂家是很难去完成的。
如果设备制造商因各种原因无法提供服务,那么就更加难以实现了。
3.对于信息化软件公司来说,西门子的解决方案(以太网通讯接口模块及其数据采集软件)也有一些其他的不足,譬如价格较高,支持设备的连接数不够,另外在支持ModbusTCP等开放以太网协议以及快速实施成百上千台设备数据采集时也不是很方便。
为了解决这个现实的问题,凌顶科技研发了SCANET系列产品,目标是为西门子SIMATIC自动化控制系统的以太网信息化数据采集提供一个统一的平台;这个平台包括一系列的硬件产品和丰富的软件支撑,功能包括基本的STEP7编程调试、以太网数据通讯、Modbus主从站通讯、第三方数据交换、远程数据订阅和远程设备维护;应用于以太网方式的控制系统编程调试、现场设备监控、局域网设备信息化数据采集和基于云端的设备远程维护和信息化管理系统。
西门子 SINUMERIK 802S 802C base line 说明书

!
!
警告: 表示有潜在危险。如果不注意避免,很可能会导致人身伤亡或重大财产损失。
!
注意: 和安全警示符同时使用,表示有潜在的危险状况。如果不注意避免,可能会导致 人身伤害或财产损失。
注意: 没有使用安全警示符,表示有潜在的危险状况。如果不注意避免,可能会造成财 产损失。
说明: 说明与产品相关的重要信息,或者是在文件中应特别注意的内容。
6.
零件编程
………………………………………………………………………………………………………… 6-1 ……………………………………………………………………… 6-3 输入新程序 — “程序”操作区 ……………………………………………………………… 6-4 零件程序的编辑 — “程序”运行方式 辅助编程 ……………………………………………………………………………………………… 6-7 垂直菜单 ……………………………………………………………………………………………… 6-7 循环 …………………………………………………………………………………………………… 6-8 轮廓 …………………………………………………………………………………………………… 6-9 软键的用户设定 ……………………………………………………………………………………… 6-25 模拟 … ……………………………………………………………………………………………… 6-26 … … …………………………………………………………………………………………………… 通过 RS232 接口进行数据传送 — “通讯”操作区 ………………………………………………… 接口参数 ……………………………………………………………………………………………… 特殊功能 ……………………………………………………………………………………………… 接口参数的设定 … ……………………………………………………………………………………… ………………………………………………………………… 诊断和开机调试 — “诊断”操作区 … 7-1 7-1 7-4 7-5 7-6 7-8 8-1 8-1 8-1 8-2 8-3
西门子减速机维护手册说明书

Gearhead Maintenance Manual2. Inspection upon deliveryhe gearhead and motor should be handled, installed and maintained by trained technicians. Carefully read this manual and all copy of this manual should be sent to the actual user of the gear unit.his manual should be maintained by the user.. G earhead and motor with same model number and same heat treatment symbols can be combined. Please refer to Fig. 1 as an example.3. Allowable maximum torque. A llowable maximum torque is maximum torque during motor operation. It is limited by rated motor torque, temperature rise, and strength of gearhead combined. This torque depends on reduction ratio. Please refer to catalogue for details.4. Rotating direction. T here are two rotating directions for output shaft of gearhead, same direction as motor and counter-direction, determined by reduction ratio. Refer to (table 1).. Direction of intermediate gearhead (1/10) is the same as a single unit.Fig.1 Combination example ofmotor & gearhead1) A8 M 25 DG8 K Model No.{Motor}:Reduction ratio{Gearhead}{Motor}{Gearhead}2) A9 M 60 A H G9BK HModel No.Heat treatment symbol5. Operation life & service factor (SF) of gearheadTable 2. Service factor & load type. A pply each service factor corresponding to the load type (Refer to Table 2).. The operating life of gearhead with service factor 1.0 would be 5,000hrs.Fig. 2No.EM0101E-4.0EE01 Printed 2020.04The warranty period for the new Products shall be 18 months after the shipment of the Products from the seller’s works or 12 months from the Products coming into operation, In the event that any problem or damage to the Product arises during the “Warranty Period” from defects in the Product whenever the Product is properly installed and com-bined with the Buyer’s equipment or machines, maintained as specified in the maintenance manual, and properly operated under the conditions described in the catalog or as otherwise agree upon in writing between the Seller and the Buyer or its customers; the Seller will provide, at its sole discretion, appropriate repair or replacement of the Product, However, if the Product is installed or integrated into the Buyer’s equipment or machines, the Seller shall not reimburse the cost of: removal or re-installation of the Product or other incidental costs related thereto, any lost opportunity, any profit loss or other incidental or consequential losses or damages incurred by the Buyer or its customers.installation, connection, combination or integration of the Product in or to the other equipment or machine that is rendered by any person or entity other than the Seller ; insufficient maintenance or improper operation by the Buyer or its customers, such that the Product is not maintained in accordance with the maintenance manual provided improper use or operation of the Product by the Buyer or its customers that is not informed to the Seller, including, without limitation, the Buyer’s or its customers’ operation any problem or damage to any equipment or machine to which the Product is installed, connected or combined, or on any specifications particular to the Buyer or its cus-any changes, modifications, improvements or alterations to the Product or those functions that are rendered on the Product by any person or entity other than the Seller ;。
西门子控制系统维护说明书S篇
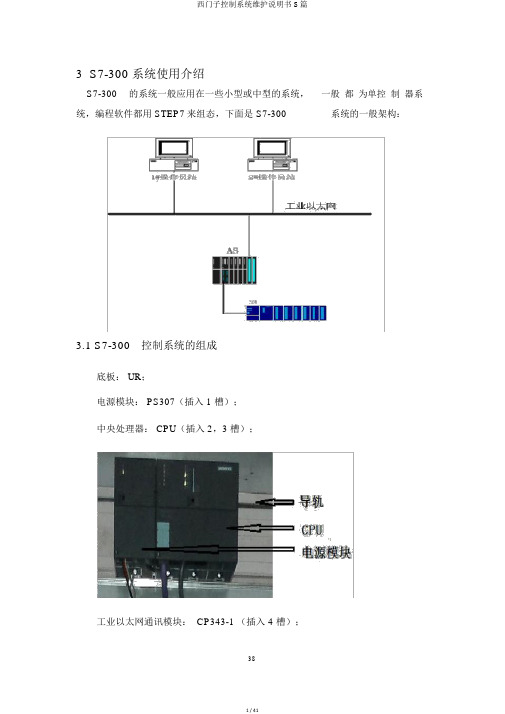
3 S7-300 系统使用介绍S7-300的系统一般应用在一些小型或中型的系统,一般都为单控制器系统,编程软件都用 STEP7来组态,下面是 S7-300系统的一般架构:3.1 S7-300控制系统的组成底板: UR;电源模块: PS307(插入 1 槽);中央处理器: CPU(插入 2,3 槽);工业以太网通讯模块: CP343-1 (插入 4 槽);I/O 模块。
3.1.1 底板安装各种模块(如: PS,CPU, CP,I/O模块等);提供背板总线: I/O 总线;通讯总线;通过背板总线实现各模块之间的数据和信号交换;电源模块所提供 5VDC和 24VDC通过背板总线供给各模块;电源模块必须插在底板的最左边(槽1)。
电源模块采用封闭结构的模块设计,安装在底板上;插入式的 AC/DC供电连接;保护级别: IP20;两种输出电压: 5VDC和 24VDC,并共用一个地;监视两个输出电压,如其中一个发生故障,该模块输出一个报错信号给CPU;具有输出短路保护功能;在前面板上有运行和故障指示灯。
3.1.3 CPU模块整个控制系统的核心;储存和运行操作系统程序;储存和运行用户程序;与各种功能模块及I/O 模块进行数据交换;进行实时的连续及顺序控制(如 PID 控制,泵和电机的启停等用户所需的控制);完成自诊断,接收各种模块的诊断信息。
CPU含有两类程序:操作系统和用户程序。
其中操作系统主要作用是:处理 CPU再启动;刷新过程映象的输入部分及将输出部分送出;执行用户程序;检测中断并执行中断程序;检测并处理错误;管理内存;与操作员站、工程师站及其它设备通讯。
用户程序主要作用是:完成用户所规定的控制任务。
CPU模块指示灯含义:INTF:红色,内部故障;EXTF:红色,外部故障;BUS:红色,当红灯亮时,为MPI/PROFIBUS-DP 接口1 总线故障,当红灯闪时有两种情况:DP 为主站时,一般是一个或多个从站没有响应,DP 为从站时,一般是地址错误;FRCE:黄色,变量强制激;RUN:绿色,CPU在运行模;STOP:红色,CPU在停止模式。
西门子智能控制器HMS-S -SE -SP和HMS-D -DE -DP说明书

Siemens Siemens Industry Industry Industry,, Inc.Building T ec echnologies Di hnologies Di hnologies Division vision P/N 315-033200-7INTRODUCTION The Model HMS-S and HMS-D Manual Stations, andtheir Spanish and Portuguese versions, from SiemensIndustry, Inc., are field installed addressable devicescontaining advanced control panel communicationtechnology. This technology, which provides two-direction communication with the control panel,produces an Intelligent Initiating Device. The HMS-S/-SE/-SP are single action; the HMS-D/-DE/-DP are double action.PROGRAMMINGRefer to Figure 1 to locate the opening on the MS cover that allows access to the programming holes which are on the HMS printed circuit board.To connect the HMS to the DPU Programmer/T ester,insert the plug from the DPU cable provided with theProgrammer/Tester into the opening on the HMS asshown in Figure 2. Because HMS devices are polarityinsensitive, the programming plug can be inserted intothe programming holes in either direction.To prevent potential damage to the DPU DO NO DO NO DO NOT T connect an HMS to the DPU until at least one wire is removed from terminals 1 or 2 of the HMS.Follow the instructions in the DPU Manual(P/N 315-033260) to program the HMS to the desiredaddress. Record the device address on the labellocated on the HMS front panel. The HMS can now be installed and wired to the system.OPERATION The HMS-S and HMS-D manual stations, as well as their Spanish and Portugueseversions, operate with the FireFinder-XLS or FS-250 Control Panels via the DLC or FS-DLC Device Loop Card.All HMS manual station housings have a pull down lever that locks in position afterreleasing a spring loaded switch. (See Figure 4.) To indicate the manual station isactivated, the pull down lever remains down and locked until the station is physicallyreset.The HMS-D/-DE/-DP have an additional lever labeled PUSH IN/EMPUJE/EMPURREwhich must be operated first.All models are reset by opening the hinged housing cover with an Allen key and thenclosing and locking the cover.Figure 1MS Cover Single/Dual Action Manual Pull StationInstallation InstructionsModels HMS-S / HMS-DModels HMS-SE / HMS-DE (Spanish versions)Models HMS-SP / HMS-DP (Portuguese versions)Figure 2Connecting the DPU Plug INSTRUCTIONSWIRINGINSTALLATION Distribute the manual station boxes throughout the protected area so that theyare unobstructed, readily accessible, and located in the normal exit path. Place themanual station according to the regulations of the authorities having jurisdiction.Surface Mounting Mount the backplate to a Model SB-5R Backbox as shown in Figure 4.Flush MountingMount the backplate to a user supplied single gang switchbox.Do not overtighten the screws. Overtightening may distort the backplate.Figure 3Wiring InformationNEXT ADDRESSABLE DEVICEGROUND INITIATING CONTROL PANEL PREVIOUS ADDRESSABLE DEVICESTYLE 4/6TO DLC INSTALLATION P/N 315-033090NOTES :1.Recommended wire sizes:18 AWG minimum, 14 AWG maximum 2.Wire larger than 14 AWG can damage the connector.3.When using shielded cable without metal raceway or with nonmetallic raceway, the shields should be terminated at the device ground terminal. If the device box is already grounded by another means, such as being mounted to a grounded structure, the wire shields should be continuous and must be grounded solely at the point of origin; for example, at the control panel.4.When using shielded cable with metal raceway, the wiring shields shall be continuous and grounded solely at the point of origin. The device ground terminal shall be connected to the grounded device box.5.When using metal raceway without shielded cable, connect the device ground terminal to the grounded device box.6.Metal raceway should be thoroughly grounded throughout the system.7.In supervisory: All HMS manual stations draw 1mA.8.All HMS manual stations are polarity insensitive devices. Line 1 andLine 2 can be either line of the DLC or FS-DLC loop.P/N 315-033200-7ENCLOSUREFigure 4Mounting The HMSSiemens Industry, Inc.Building T echnologies DivisionFlorham Park, NJ ELECTRICAL RATINGS po o L C L D -S F /C L D t n e r r u C .x a M Am 1Document ID A6V10239110。
西门子电梯LGM控制系统说明书

西门子电梯LGM控制系统说明书
电梯是高层建筑不可缺少的交通工具。
它用于垂直运输乘客和货物。
传统的电梯控制系统主要采用继电器—接触器进行控制。
缺点是触点多,故障率高,可靠性差,维护工作量大。
等,而由西门子电梯LGM控制系统组成的可以很好地解决上述问题,使电梯运行更加安全、方便、舒适。
目前已在电梯行业得到广泛应用。
西门子电梯LGM控制系统用于控制电梯。
通过合理的选型和设计,提高了电梯的控制水平,提高了电梯运行的舒适性,使电梯达到了比较理想的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3S7-300系统使用介绍S7-300的系统一般应用在一些小型或中型的系统,一般都为单控制器系统,编程软件都用STEP7来组态,下面是S7-300系统的一般架构:3.1 S7-300 控制系统的组成●底板:UR;●电源模块:PS307(插入1槽);●中央处理器:CPU(插入2,3槽);●工业以太网通讯模块:CP343-1 (插入4槽);●I/O模块。
3.1.1底板●安装各种模块(如:PS,CPU,CP,I/O 模块等);●提供背板总线:I/O总线;通讯总线;●通过背板总线实现各模块之间的数据和信号交换;●电源模块所提供5VDC和24VDC通过背板总线供给各模块;●电源模块必须插在底板的最左边(槽1)。
3.1.2电源模块●采用封闭结构的模块设计,安装在底板上;●插入式的AC/DC供电连接;●保护级别:IP20;●两种输出电压:5VDC和24VDC,并共用一个地;●监视两个输出电压,如其中一个发生故障,该模块输出一个报错信号给CPU;●具有输出短路保护功能;●在前面板上有运行和故障指示灯。
3.1.3 CPU模块●整个控制系统的核心;●储存和运行操作系统程序;●储存和运行用户程序;●与各种功能模块及I/O模块进行数据交换;●进行实时的连续及顺序控制(如PID控制,泵和电机的启停等用户所需的控制);●完成自诊断,接收各种模块的诊断信息。
CPU含有两类程序:操作系统和用户程序。
其中操作系统主要作用是:●处理CPU再启动;●刷新过程映象的输入部分及将输出部分送出;●执行用户程序;●检测中断并执行中断程序;●检测并处理错误;●管理内存;●与操作员站、工程师站及其它设备通讯。
用户程序主要作用是:●完成用户所规定的控制任务。
CPU模块指示灯含义:●INTF:红色,内部故障;●EXTF:红色,外部故障;●BUS:红色,当红灯亮时,为MPI/PROFIBUS-DP接口1总线故障,当红灯闪时有两种情况:DP为主站时,一般是一个或多个从站没有响应,DP为从站时,一般是地址错误;●FRCE:黄色,变量强制激;●RUN:绿色,CPU在运行模;●STOP:红色,CPU在停止模式。
运行与停止灯处于不同状态表示的含义:(×:表示无关)CPU运行模式选择开关说明:●RUN-P:对于启动,如果没有错误或限制的话,CPU可以进入运行状态,并运行用户程序。
钥匙在此位置不能取出。
程序可以用编程器读出,也可下装到CPU;●RUN:对于启动,如果没有错误或限制的话,CPU可以进入运行状态,并运行用户程序。
钥匙在此位置能取出,以防止非专业人员改变操作状态,程序可以用编程器读出,但不能下装到CPU和修改程序。
如果在CPU内设置一个密码,就可修改程序;●STOP:CPU进入停止状态,不能执行运行用户程序。
钥匙在此位置能取出。
以防止非专业人员改变操作状态。
程序可以用编程器读出,也可下装到CPU;●MERS:清内存并重新启动CPU。
清内存步骤如下:第一种情况:用户要下装新的程序到CPU:第一步:将运行模式选择开关拨到“STOP”位置:结果STOP灯亮。
第二步:将运行模式选择开关拨到“MERS”位置,并保持:结果STOP 灯灭1S,亮1S,再灭1S,再亮1S。
第三步: 将运行模式选择开关拨到“STOP”位置,并在3S内将运行模式选择开关拨回“MERS”位置,再使运行模式选择开关回到“STOP”位置,如果STOP灯以2HZ频率至少闪3S,然后保持亮,证明清内存成功。
第二种情况:STOP灯正在以0.5HZ慢闪,证明CPU要求清内存(例如内存卡重新插拔),此时只需将运行模式选择开关拨到“MERS”位置再返回到“STOP”位置,如果STOP灯以2HZ频率至少闪3S,然后保持亮,即清内存成功。
3.1.4通讯模块●用于连接工业以太网的通讯接口模块;●将CPU所有的过程数据通过工业以太网传送给所有连在网上的服务器和工程师站;●将所有的服务器和工程师站需要下传数据通过工业以太网传送给CPU 。
在首次下装后,通过通讯模块工程师站或编程器可以对CPU进行组态;●在工程师站或编程器上通过通讯模块对CPU进行在线监视;●在工程师站或编程器上通过通讯模块对CPU进行在线诊断。
通讯模块面板显示灯的含义:●SF:组错误;●BF:以太网接口的总线故障;●DC5V:5VDC电源,通过背板总线供电(绿灯表示正常);●TXD(绿):闪时表示CP正在发送数据;●RXD(绿):闪时表示CP正在接收数据;●RUN:运行模式;●STOP:停止模式;●X1P1:以太网端口1的连接状态/活动;●X1P2:以太网端口2的连接状态/活动;●MAINT:需要维护(查看缓冲诊断区)。
3.1.5 I/O模块●主要分为DI,DO,AI,AO等四类基本功能模块;●DI模块:用于直流或交流电压的简单信号模块。
当输入为1,相应通道的输入灯亮;●DO模块:用于DC和AC电压的简单信号模块,每个通道具有各种输出电流,多种继电器模块可用于较高输出电流和电压。
当输出为1,相应通道的输出灯亮;●AI模块:用于电流电压和温度测量的多功能模块;●AO模块:用于电压和电流的模拟量输出的模块。
I/O模块前面板上各指示灯的含义:●“SF”—故障指示灯:红灯亮表示模块或某个通道有故障,并且对应通道上的故障指示灯会亮起。
模拟量模块的使用事项:●CPU处理以二进制表示的模拟量;●模拟量输入模块将模拟信号转换数字信号;●模拟量输出模块将数字信号转换模拟信号;●数字信号以一个16位字的二进制补码表示。
注:在接线错误的情况下(例如极性接反,输入开路)、或热电偶量程不符(例如热电偶类型不正确)输出8000H。
热电偶模块(6ES7 331-7PE10-0AB0)的接线图:热电阻模块(6ES7 331-7PF01-0AB0)接线图:4-20mA及1-5V信号模块(6ES7 331-7KF02-0AB0)数值表示方法:4-20mA及1-5V信号模块接线图:注:该模块是通用型模块,可通过改变量程模块的位置测量不同信号,两个信号为一组,共用一个量程模块,量程模块如下图:A:mV及热电偶B:电压C:四线制电流D:两线制电流模拟量输出信号模块(6ES7 332-5HF00-0AB0)数值表示方法:模拟量输出信号模块(6ES7 332-5HF00-0AB0)接线图:数字量输入信号模块(6ES7 321-1BH02-0AA0)检测状态表示方法:数字量输入信号模块(6ES7 321-1BH02-0AA0)接线图:数字量输出信号模块(6ES7 321-1BH01-0AA0)检测状态表示方法:数字量输出信号模块(6ES7 321-1BH01-0AA0)接线图:3.2 接口模块3.2.1接口模块的属性●用于连接多层S7-300配置机架;●IM365:用于配置一个中央控制器和一个扩展机架;●IM360/IM361:用于配置一个中央控制器和三个扩展机架。
3.2.2接口模块的前视图及LED指示灯状态诊断●IM360接口模块;●IM361接口模块;●IM365接口模块;IM365不支持LED指示灯状态诊断。
3.3 分布式I/O ET200M●导轨: DIN;●总线模块:U型总线连接器;●接口模块:IM153-2;●I/O模块。
3.3.1 导轨●S7-300的机械安装机架;●包括160mm,482mm,530mm,830mm,2000mm几种规格。
3.3.2 U型总线连接器●用于CPU和机架上的模块之间的数据信号,通讯信号和电源的传递;●不支持热插拔功能。
3.3.3 IM153-2接口模块●与1~8个I/O模块组成Profibus-DP网上的一个站;●接受24伏电压,通过背板总线向I/O模块提供电压;●通过背板总线与I/O模块进行数据交换;●通过Profibus-DP与CPU进行数据交换。
接口模块IM153-2的前面板图如下:接口模块前面板上各指示灯的含义:●“SF”—系统故障指示灯:红灯亮表示有系统故障;●“BF”—总线故障指示灯:黄灯亮表示有Profibus-DP总线故障;●“ACT”—总线运行指示灯:黄灯亮表示该接口模块处于总线运行状态;●“ON”—模块运行指示灯:绿灯亮表示该接口模块处于模块运行状态。
IM153-2具有一组拨码开关,用于设置该IM153-2在Profibus-DP网上的地址(同一条Profibus-DP网上不能有重复的地址)。
IM153-2地址设置范围为1~125。
不同指示灯状态的含义:3.3.4 I/O模块已在前面章节中讲述过。
3.4 S7-300控制系统的故障诊断●故障灯诊断方法;●AS站诊断缓存区(Diagnostic Buffer)诊断方法;●在线硬件诊断方法3.4.1故障灯诊断方法观察模块上的指示灯,在前面已经做了较详细的介绍。
3.4.2AS站诊断缓存区(Diagnostic Buffer)诊断方法诊断步骤如下:●在SIMATIC Manager中,选中待诊断的CPU(如CPU417-4H),点击右键,在弹出的菜单选择“PLC”,再在弹出的菜单选择“模块信息”,如下图所示:●点击“模块信息”,弹出下图所示窗口;●点击选项卡“诊断缓冲区”,将显示CPU所得到的诊断信息(根据诊断信息可以分析系统的故障及原因),如下图所示:3.4.3在线硬件诊断方法诊断步骤如下:●在SIMATIC管理器中,选中待诊断的CPU所在的控制站(如SIMATIC HStation(1)),在右边内容栏中双击“Hardware”,如下图所示:●双击“Hardware”后即打开硬件组态界面,点击工具栏中的,则工程师站与控制站建立了在线连接,双击需要诊断的模块,就会弹出下图所示的模块诊断信息窗口(根据诊断信息可以分析模块的故障及原因)。
3.4.4诊断信息的收集诊断信息的收集应遵循以下原则:●及时收集,在故障发生后立即保存当时的诊断信息,否则诊断缓冲区可能被后续的其他信息覆盖;●将诊断信息以英文显示;●同时保存文本格式和HEX(十六进制显示格式)的文件;●除了CPU诊断信息,还需保存和故障相关硬件(CP,I/O模块等)的诊断信息。
诊断信息的收集方法:对于控制器,CP网卡以及具备诊断缓冲区的I/O卡件等诊断信息的收集过程参考以下步骤:●首先打开HW Config编辑器,切换到硬件在线模式;●在硬件在线模式下双击CPU(或CP网卡等)的诊断信息窗口,切换到Diagnostic Buffer标签项下;●将诊断缓冲区另存成文件形式;●将诊断缓冲区保存为HEX文件格式,在Diagnose Buffer 标签下点击“Setting…”按钮弹出“Setting for Display Diagnostic Buffer”,在默认情况下“Diaplsy Events”中的选项全部被勾选,此时,诊断缓冲区将显示能记录的所有类型的事件;勾选“Output event information in hexadecimal format”选项,从而诊断缓冲区所输出的诊断条目将显示为HEX的格式。