晶闸管双闭环直流调速系统设计(一类特选)
晶闸管双闭环不可逆直流调速系统设计
目录第一章绪论 (2)第二章主电路结构选择 (3)2.1变压器参数计算 (4)第三章双闭环直流调速系统设计 (5)3.1电流调节器的设计 (7)3.2转速调节器的设计 (10)第四章触发电路的选择与原理图 (14)第五章直流调速系统MATLAB仿真 (16)第六章总结 (18)第七章参考文献 (18)第一章绪论转速负反馈控制直流调速系统(简称单闭环调速系统)PI调节器的单闭环转速系统可以实现转速调节无静差,消除负载转矩扰动对稳态转速的影响,并用电流截止负反馈限制电枢电流的冲击,避免出现过电流现象。
但转速单闭环系统并不能充分按照理想要求控制电流(或电磁转矩)的动态过程。
对于经常正、反转运行的调速系统,缩短起、制动过程的时间是提高生产率的重要因素。
在起动(或制动)过渡过程中,希望始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。
当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。
这类理想启动过程示意下图1所示。
图1 单闭环调速系统理想启动过程启动电流呈矩形波,转速按线性增长。
这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动(制动)过程。
下面我们引入了一种双闭环系统来对控制系统进行优化。
第二章 主电路结构选择目前具有多种整流电路,但从有效降低脉动电流保证电流连续和电动机额定参数的情况出发本设计选用三相桥式全控整流电路,其原理如图2-1所示,习惯将其中阴极连接在一起到3个晶闸管(531,,VT VT VT )称为共阴极;阳极连接在一起的3个晶闸管(642,,VT VT VT )称为共阳极,另外通常习惯晶闸管从1至6的顺序导通,为此将晶闸管按图示的顺序编号,即共阴极组中与a,b,c 三相电源相接的3个晶体管分别是531,,VT VT VT ,共阳极组中与a,b,c 三相电源相接的3个晶闸管分别是642,,VT VT VT 。
图2-1 三相桥式全控整流电路原理图其工作特点为:1)每个时刻均需2个晶闸管同时导通,形成向负载供电的回路,其中1个晶闸管是共阴极组的,1个是共阳极组的,且不能为同一相的晶闸管。
双闭环直流调速系统的设计
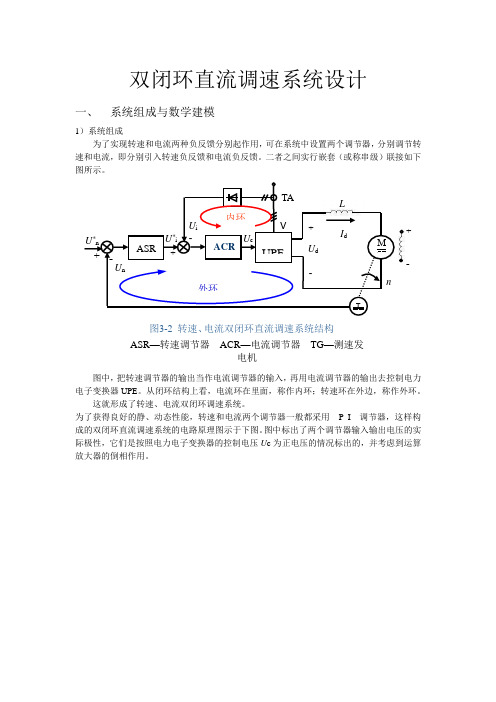
双闭环直流调速系统设计一、系统组成与数学建模1)系统组成为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
二者之间实行嵌套(或称串级)联接如下图所示。
L+-图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用P I 调节器,这样构成的双闭环直流调速系统的电路原理图示于下图。
图中标出了两个调节器输入输出电压的实际极性,它们是按照电力电子变换器的控制电压U c为正电压的情况标出的,并考虑到运算放大器的倒相作用。
2)数学建模图中W ASR(s)和W ACR(s)分别表示转速调节器和电流调节器的传递函数。
如果采用PI调节器,则有ss K s W i i iACR 1)(ττ+= ss K s W n n nASR 1)(ττ+=二、 设计方法采用工程设计法 1、设计方法的原则: (1)概念清楚、易懂; (2)计算公式简明、好记;双闭环直流调速系统的动态结构图(3)不仅给出参数计算的公式,而且指明参数调整的方向; (4)能考虑饱和非线性控制的情况,同样给出简单的计算公式; (5)适用于各种可以简化成典型系统的反馈控制系统。
2、工程设计方法的基本思路:(1)选择调节器结构,使系统典型化并满足稳定和稳态精度。
(2)设计调节器的参数,以满足动态性能指标的要求。
一般来说,许多控制系统的开环传递函数都可表示为∏∏==++=n1i irm1j j )1()1()(s T ss K s W τ上式中,分母中的 sr 项表示该系统在原点处有 r 重极点,或者说,系统含有 r 个积分环节。
根据 r=0,1,2,……等不同数值,分别称作0型、I 型、Ⅱ型、……系统。
双闭环直流调速系统课程设计
UPE。
从闭环结构上看,电流环在里面称为内环,转速环在外面,称作外环。
这就形成了转速,电流反馈控制直流调速系统。
图1 转速、电流反馈控制直流调速系统原理图2.双闭环的稳态结构图和静特性图2 双闭环直流调速系统的稳态结构图转速调节器ASR的输出限幅电压决定了电流给定的最大值,电流调节器ACR的输出限幅电压限制了电力电子变换器的最大输出电压,当调节器饱和时,输出达到限幅值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和;当调节器不饱和时,PI调节器工作在线性调节状态,其作用是使输入偏差电压在稳态时为零。
对于静特性来说,只有转速调节器饱和与不饱和两种情况,电流调节器不进入饱和状态 。
3.双闭环直流调速系统的动态数学模型双闭环直流调速系统的动态结构图如图3所示,图中分别表示转速调节器和电流调节器的传递函数。
为了引出电流反馈,在电动机的动态结构图中必须把电枢电流Id 显露出来。
图3 双闭环直流调速系统的动态结构图4.双闭环直流调速系统的调速方法调节转速可以有三种方法: (1)调节电枢供电电压U ; (2) 减弱励磁磁通Φ; (3) 改变电枢回路电阻R 。
对于要求在一定范围内无级平滑调速的系统来说,以调节电枢供电电压的方式最好。
改变电阻只能实现有级调速;减弱励磁磁通虽然能够平滑调速,但调速的范围不大,往往只是配合调压方案,在基速(额定转速)以上做小范围的弱磁升速。
因此,自动控制的直流调速系统往往以改变电压调速为主。
5.电流环、速度环的设计初始条件某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下:直流电机参数为:额定电压220V U =,额定电流136I A =;额定转速n 1460rpm =,0.132min/e V r C =⋅,允许过载倍数 1.5λ=;晶闸管装置放大系数40s K =;电枢回路总电阻0.5R =Ω;时间常数0.03,0.18l m s s T T ==;电流反馈系数0.05/V A β=;转速反馈系数0.007min/V r α=⋅。
晶闸管双闭环直流调速系统设计

晶闸管双闭环直流调速系统设计引言:直流调速系统广泛应用于电机控制领域,其中晶闸管双闭环直流调速系统具有较好的性能和可靠性。
本文将介绍晶闸管双闭环直流调速系统的设计原理和步骤,并分析其性能和可行性。
一、系统设计原理:晶闸管双闭环直流调速系统由速度环和电流环组成。
其中速度环通过测量电机转速与期望速度之间的误差并反馈控制,通过调整电机的输入电压来改变电机的转速。
电流环通过测量电机输出电流与期望电流之间的误差并反馈控制,通过调整晶闸管的导通角来改变电机的输出电流。
速度环和电流环通过PID控制器进行控制,实现闭环控制。
二、系统设计步骤:1.确定系统参数:包括电机参数、电压参数、电流参数和速度参数等。
根据实际情况选择合适的参数值。
2.设计速度环:首先选择合适的速度传感器进行速度测量,如光电编码器或霍尔元件。
然后根据测量值与期望速度之间的误差计算PID控制器的输出值,进一步控制电机的输入电压。
3.设计电流环:选择合适的电流传感器进行电流测量,如电流互感器或霍尔元件。
根据测量值与期望电流之间的误差计算PID控制器的输出值,进一步控制晶闸管的导通角。
4.设计反馈回路:将测量到的速度和电流信号经过滤波器进行滤波处理,减小干扰。
然后将滤波后的信号输入到PID控制器,计算控制器的输出值。
最后将控制器的输出值经过扩大器进行放大,最终作为输入信号驱动电机。
5.系统仿真和优化:使用MATLAB等仿真软件进行系统仿真,分析系统的性能和稳定性。
根据仿真结果,调整控制参数和系统结构,优化系统性能。
三、系统性能和可行性分析:晶闸管双闭环直流调速系统具有较好的稳态和动态性能。
速度环能够实现对电机速度的精确控制,适应不同负载的要求。
电流环能够实现对电机输出电流的精确控制,保证电机的安全运行。
经过优化设计的系统具有较快的响应速度、较小的超调量和较好的稳定性。
总结:本文介绍了晶闸管双闭环直流调速系统的设计原理和步骤,并分析了其性能和可行性。
双闭环直流调速系统(课程设计)
4•仿真实验95•仿真波形分析13三、心得体会14四、参考文献161•课题研究的意义从七十年代开始,由于晶闸管直流调速系统的高效、无噪音和快速响应等优点而得到广泛应用。
双闭环直流调速系统就是一个典型的系统,该系统一般含晶闸管可控整流主电路、移相控制电路、转速电流双闭环调速控制电路、以及缺相和过流保护电路等。
直流调速是现代电力拖动自动控制系统中发展较早的技术。
就目前而言,直流调速系统仍然是自动调速系统的主要形式,在许多工业部门,如轧钢、矿山采掘、纺织、造纸等需要高性能调速的场合得到广泛的应用。
且直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速和快速正反向的电力拖动领域中得到了广泛的应用。
由于直流拖动控制系统在理论上和实践上都比较成熟,而且从控制的角度来看,它又是交流拖动控制系统的基础。
所以加深直流电机控制原理理解有很重要的意义。
2•课题研究的背景电力电子技术是电机控制技术发展的最重要的助推器,电力电机技术的迅猛发展,促使了电机控制技术水平有了突破性的提高。
从20世纪60年代第一代电力电子器件-晶闸管(SCR)发明至今,已经历了第二代有自关断能力的电力电子器件-GTR、GTO、MOSFET,第三代复合场控器件-IGBT、MCT等,如今正蓬勃发展的第四代产品-功率集成电路(PIC)。
每一代的电力电子元件也未停顿,多年来其结构、工艺不断改进,性能有了飞速提高,在不同应用领域它们在互相竞争,新的应用不断出现。
同时电机控制技术的发展得力于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术和微机应用技术的最新发展成就。
正是这些技术的进步使电动机控制技术在近二十多年内发生了天翻地覆的变化。
(3-16) 取:(3-17) ◎i=4.3%<5%,满足课题所给要求。
3.3速度调节器设计电流环等效时间常数1/K。
取KT乙=0.5,贝IJ:1二2X0.0067二0.0134K(3-15)转速滤波时间常数T on。
晶闸管逻辑控制无环流双闭环可逆直流调速系统设计
晶闸管逻辑控制无环流双闭环可逆直流调速系统设计
晶闸管逻辑控制无环流双闭环可逆直流调速系统是一种常见的电力电子调速系统,可以通过控制晶闸管的通断来实现直流电机的调速。
该系统采用了双闭环控制结构,其中一个闭环用于控制电机输出速度,另一个闭环用于控制电流。
在系统设计中,首先需要进行系统建模和参数的确定,包括电机的转矩速度特性、负载特性以及电路元件的特性等。
然后,设计合适的速度控制算法和电流控制算法,以实现闭环控制。
常见的速度控制算法有比例积分控制(PI控制)和模糊控制等,而电流控制通常采用比例控制。
在实际的实现过程中,还需要考虑到系统的稳定性、鲁棒性和响应速度等因素。
可以通过仿真和实验进行系统性能的优化和调整,以达到设计要求。
需要注意的是,在设计和实现过程中,要遵守相关的技术规范和安全标准,确保系统的可靠性和安全性。
同时,也要注意电源的稳定性和电磁兼容性等问题,以减少对其他设备的干扰。
总之,晶闸管逻辑控制无环流双闭环可逆直流调速系统设计涉及到电力电子和控制理论等多个领域,需要综合考虑系统的各个方面,确保系统的性能和安全。
(2021年整理)晶闸管双闭环直流调速系统设计
晶闸管双闭环直流调速系统设计(推荐完整)编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(晶闸管双闭环直流调速系统设计(推荐完整))的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为晶闸管双闭环直流调速系统设计(推荐完整)的全部内容。
晶闸管双闭环直流调速系统设计(推荐完整)编辑整理:张嬗雒老师尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布到文库,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是我们任然希望晶闸管双闭环直流调速系统设计(推荐完整)这篇文档能够给您的工作和学习带来便利。
同时我们也真诚的希望收到您的建议和反馈到下面的留言区,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请下载收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为 <晶闸管双闭环直流调速系统设计(推荐完整)〉这篇文档的全部内容。
电力拖动自动控制系统课程设计报告班级:自动1102姓名:张晨学号: 111401217指导老师:谢勇扬州大学信息工程学院自动化专业部2014年12月29日至2015年1月4日目录一课程设计目的和意义()二技术指标和设计要求 ()2.1。
技术数据2.2. 设计要求三系统方案选择()四电路的设计()4.1。
主电路设计()4.2。
触发电路设计()4。
3。
调节器参数设计() 4.4。
保护电路设计()五系统电路图及电路工作原理 ()六系统仿真模型()6。
1。
双闭环直流调速系统仿真电路图() 6。
2. 断开速度环后系统的仿真波形()七心得体会()八参考书目()一课程设计目的和意义1。
(完整word版)双闭环直流调速系统(精)
直流双闭环调速系统设计1设计任务说明书某晶闸管供电的转速电流双闭环直流调速系统,整流装置采用三相桥式电路,基本数据为: 直流电动机:V U N 750=,A I N 780=,min375rn N =,04.0=a R ,电枢电路总电阻R=0.1Ω,电枢电路总电感mH L 0.3=,电流允许过载倍数5.1=λ,折算到电动机轴的飞轮惯量224.11094Nm GD =. 晶闸管整流装置放大倍数75=s K ,滞后时间常数s T s 0017.0= 电流反馈系数⎪⎭⎫ ⎝⎛≈=N I V A V5.11201.0β 电压反馈系数⎪⎭⎫ ⎝⎛=N n V r V 12min 032.0α 滤波时间常数.02.0,002.0s T s T on oi ==V U U U cm im nm12===**;调节器输入电阻Ω=K R O 40。
设计要求: 稳态指标:无静差动态指标:电流超调量005≤i σ;空载起动到额定转速时的转速超调量0010≤n σ。
目 录1设计任务与分析 ....................................................................................................................................... 2调速系统总体设计 ................................................................................................................................... 3直流双闭环调速系统电路设计 .............................................................................................................. 3。
双闭环直流调速系统课程设计
电力拖动自动控制系统课程设计报告题目:晶闸管双闭环直流调速系统摘要双闭环直流调速系统即速度和电流双闭环直流调速系统,是由单闭环直流调速系统发展起来的,调速系统使用比例积分调节器,可以实现转速的无静差调速。
又采用电流截止负反馈环节,限制了起(制)动时的最大电流。
这对一般的要求不太高的调速系统,基本上已经能满足要求。
但是由于电流截止负反馈限制了最大电流,加上电动机反电势随着转速的上升而增加,使电流到达最大值后迅速降下来,这样,电动机的转矩也减小了,使起动加速过程变慢,起动的时间比较长。
在这些系统中为了尽快缩短过渡时间,所以就希望能够充分利用晶闸管元件和电动机所允许的过载能力,使起动的电流保护在最大允许值上,电动机输出最大转矩,从而转速可直线迅速上升,使过渡过程的时间大大的缩短。
另一方面,在一个调节器的输出端有综合几个信号,各个参数互相调节比较困难。
为了克服这一缺点就应用转速,电流双闭环直流调速系统。
关键词:双闭环直流调速系统 ASR ACR1.设计要求直流电动机设计双闭环直流晶闸管调速系统,技术要求如下:1.1直流电动机的额定参数P N=1.1KW、U N=110V、I N=1.2A、n N=1500r/min,电枢电阻R=1a Ω,电枢绕组电感L a=28mH,系统飞轮矩GD2=0.1375Kg·m2,电流过载倍数λ=1.5。
1.2电压参数电网电压:线电压U=380V采用三相晶闸管桥式整流电路供电1.3设计要求稳态无静差,电流超调量σi≤5%;转速超调量σn≤10%。
2.双闭环直流调速系统系统总设计为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接,如下图所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
该双闭环调速系统的两个调节器ASR和ACR一般都采用PI调节器。
因为PI调节器作为校正装置既可以保证系统的稳态精度,使系统在稳态运行时得到无静差调速,又能提高系统的稳定性;作为控制器时又能兼顾快速响应和消除静差两方面的要求。
晶闸管双闭环不可逆直流调速系统.

晶闸管双闭环不可逆直流调速系统.晶闸管双闭环不可逆直流调速系统是一种应用于工业生产领域的控制装置,可以实现直流电机的调速和控制。
该系统采用双闭环调速控制方法,具有较高的稳定性、可靠性和响应速度。
本文将介绍晶闸管双闭环不可逆直流调速系统的原理、结构、工作流程及应用范围等方面的内容。
一、系统原理晶闸管双闭环不可逆直流调速系统是一种采用调速器和功率器两个控制环节的闭环控制系统,其中调速器是内环,功率器是外环。
该系统由直流电机、调速器、功率器、编码器、光耦隔离器、三相桥等组成。
系统原理如下:输入电压经过三相桥电路变为直流电压,进入调速器。
调速器采用比例积分控制方式,将电机转速的实际值与给定值进行比较,计算出差值,并将该差值乘上比例系数和积分系数得到对应的控制器输出信号,该输出信号作为功率器控制电压的输入信号。
功率器控制电压通过晶闸管触发电路,从而控制电机的电压和电流,从而控制直流电机转速。
二、系统结构1. 直流电机:系统用来进行转速控制的对象。
2. 调速器:内环控制器,控制系统输出功率器所需的电压信号。
4. 编码器:用于测量电机转速,产生脉冲信号输出到调速器中。
5. 光耦隔离器:将编码器输出信号隔离,以避免干扰和电气隔离。
6. 三相桥:将输入的交流电转化为直流电信号,供给调速器和功率器使用。
三、系统工作流程2. 速度测量:编码器测量电机的转速,然后向调速器输出转速信号,该信号与预定速度信号作差,得到调节电机速度所需要的控制量。
3. 速度调节:调速器将速度的测量值和控制输入信号进行比较,对差值进行求和,形成控制信号输出给功率器,控制电机的电压和电流,以达到调节电机速度的目的。
4. 增益调节:调整调速器的比例和积分增益,使得调速器可以更好地控制电机转速。
6. 电机转速检测:检测电机的转速是否达到预定值。
四、应用范围晶闸管双闭环不可逆直流调速系统广泛应用于各种类型的机械设备,例如:冶金、化工、石油、矿山、水泵和风机等领域。
晶闸管双闭环直流调速系统设计
电力拖动自动统造系统之阳早格格创做课程安排报告班级:自动1102姓名:弛朝教号:111401217指挥教授:开怯扬州大教疑息工程教院自动化博业部2014年12月29日至2015年1月4日目录一课程安排手段战意思()二技能指标战安排央供()2.1. 技能数据2.2. 安排央供三系统规划采用()四电路的安排()4.1. 主电路安排()4.2. 触收电路安排()4.3. 安排器参数安排()4.4. 呵护电路安排()五系统电路图及电路处事本理()六系统仿真模型()6.1.单关环直流调速系统仿真电路图()6.2. 断开速度环后系统的仿真波形()七心得体验()八参照书籍目()一课程安排手段战意思1. 认识自动统造系统安排的普遍准则、安排真量以及安排步调的央供,掌握工程安排的要领.2. 掌握自动统造系统的估计机仿真技能3.教会支集、分解、使用自动统造系统安排的有关资料战数据4.通过对付系统的安排、仿真调试, 培植独力处事本领、分解问题办理问题的本领.5. 培植体例技能归纳报告的本领.二技能指标战安排央供2.1. 技能数据直流电效果额定参数为:Unom=220V, Inom=100A, Nnom=1470r/min,Ra=0.26Ω,GD2=16N.m2, λ=1.5,励磁电压Uf=220V,励磁电流If=.给定电压最大值为10V.晶闸管整流拆置:Ks=30.系统主电路0.6R=Ω.∑2.2. 技能央供1.该调速系统能举止仄滑的速度安排,背载电机不可顺运止,具备较宽的调速范畴(D≥10),系统正在处事范畴内能宁静处事2.系统静个性良佳,无静好(静好率s≤0.03)3.动背本能指标:空载起动到额定转速时转速超调量δn<10%,电流超调量δi<5%,动背速落Δn≤8-10%4.系统正在5%背载以上变更的运止范畴内电流连绝5.调速系统中树坐有过电压、过电流等呵护6. 分解当速度环断开后系统处事情况2.3. 安排真量1.根据题手段技能央供,决定调速系统规划,绘出系统组成的本理框图.2.调速系统主电路元部件的决定及其参数估计(包罗有变压器、电力电子器件、仄波电抗器与呵护电路等)3.动背安排估计:根据技能央供,对付系统举止径背矫正,决定ASR安排器与ACR安排器的结构型式及举止参数估计,使调速系统处事宁静,并谦脚动背本能指目标央供4.分解当速度环断开后系统处事情况5.对付安排的系统举止估计机仿真6. 整治安排数据资料,撰写课程安排报告.三系统规划采用正在直流电机调速中主要有单关环、单关环的二种规划,单关环结构简朴,它采与转速背反馈战PI安排器不妨正在包管系统宁静的前提下真止转速无静好.然而是,如果对付系统的动背本能央供较下,比圆:央供赶快起造动,突加背载动背速落小等等,单关环系统便易以谦脚需要.是果为正在单关环系统中不克不迭随心所欲天统造电流战转矩的动背历程.正在单关环直流调速系统中,电流停止背反馈关节是博门用去统造电流的,然而它只可正在超出临界电流值以去,靠热烈的背反馈效率节造电流的冲打,本去不克不迭很理念天统造电流的动背波形.根据戴电流停止背反馈的单关环直流调速系统起动历程,起动电流达到最大值后,受电流背反馈的效率落矮下去,电机的电磁转矩也随之减小,加速历程延少.理念起动历程的起动电流呈圆形波,转速按线性删少.那是正在最大电流(转矩)受节造时调速系统所能赢得的最快的起动历程.为了真止正在允许条件下的最快起动,关键是要赢得一段使电流脆持为最大值的恒流历程.依照反馈统造程序,采与某个物理量的背反馈便不妨脆持该量基础稳定,那么,采与电流背反馈该当不妨得到近似的恒流历程.所以起动历程,采与电流背反馈,而正在稳态运止时只采与转速背反馈,那便是转速、电流单关环系统.为了真止转速战电流二种背反馈分别起效率,可正在系统中树坐二个安排器,分别安排转速战电流,即分别引进转速背反馈战电流背反馈.二者之间真止嵌套(或者称串级)连接,那样形成的单关环直流调速系统比单关环系统有更佳的动固态本能.由于本课题既央供系统稳态无固态,又有较下的动背本能指标,果而采用单关环调速系统.转速、电流单关环直流调速系统的圆框图如图1所示.图1 转速、电流单关环直流调速系统TA---电流互感器ACR---电流安排器TG---测速收电机ASR---转速安排器UPE---电力电子变更器Un* ---转速给定电压Un ---转速反馈电压Ui* ---电流给定电压Ui ---电流反馈电压四电路的安排单关环调速系统的动背结构框图如图2所示.正在单关环系统中,依照安排多环统造系统准则(先内环后中环),该当最先安排电流安排器,而后把所有电流内环瞅做是转速安排器中的一个关节,再安排转速安排器.正在安排的历程中需对付电流环战转速环举止近似处理战结构化简,进而决定安排器的结构,以好处后绝的模拟电路安排战参数估计.图2 单关环调速系统的动背结构框图4.1、主电路安排本安排中直流电效果由单独的可安排流拆置供电,三相齐控桥整流电路是暂时应用最广大的整流电路,其输出电压动摇小,符合直流电效果的背载,而且该电路组成的调速拆置安排范畴广(将近50).把该电路(如图3所示)应用于本安排,能真止电效果连绝、仄滑天转速安排、电效果不可顺运止等技能央供.通过安排触收延缓角а的大小去统造输出电压Ud的大小,进而改变电效果M的供电电压.由改变电枢电压调速系统的板滞个性圆程式n=( Ud/CeФ)-(RO+Ra)T/ CeCTФ2 (1)式中:Ud 整流电压,RO 整流拆置内阻,由式(1)可知,改变Ud,即可改变转速n.图3三相齐控桥整流电路4.1.2、整流变压器容量估计1、变压器次级电压为了包管背载能仄常处事,当主电路的接线形式战背载央供的额定电压决定之后,晶闸管接流侧的电压U2只可正在一个较小的范畴内变更,为此必须透彻估计整流变压器次级电压U2.效率U2值的果素有:(1)U2值的大小最先要包管谦脚背载所需要的最大直流值Ud ;(2)晶闸管并不是是理念的可控开关元件,导通时有一定的管压落,用UT 表示;(3)变压器漏抗的存留会爆收换相压落;(4)仄波电抗器有一定的直流电阻,当电流流经该电阻时便要爆收一定的电压落;(5)电枢电阻的压落.概括以上果素得到的U2透彻表白式为:上式为变压器二次侧相电压U2的较透彻表白式,正在央供不太透彻的情况下,变压器二次侧相电压U2可由简化式决定.Au U D )5.1~2.1(2= (2) 式中UD 是电效果的额定电压;系数u u d A 20=可由参照资料[1]中的表6-1查得A=2.34.估计得:U2正在112.8—141之间,与U2=120V .2、次级电流I2战变压器容量I2=KI2·Id , KI2为百般接线形式时变压器次级电流灵验值战背载电流仄衡值之比.对付于本安排KI2与0.816,且忽略变压器一二次侧之间的能量耗费,故I2=0.816×150=122.4A变压器变比K=U1/U2=380/120=3.2;与K=3.共样,由参[1]表6-1查得变压器二次战一次绕组的相数m2=3,m1=3所以 二次容量 kW I u m S 444.122*120*32222===一次容量 S1= m1* U1* I1=3*380*40.8=44KW S=(S1+S2)/2=44KW4.1.3 晶闸管参数估计三相齐控桥整流电路本量上是组成三相半波晶闸管整流电路中的共阳极组战共阳极组串联电路,如图3所示.三相齐控桥整流电路可真止对付共阳极组战共阳极组共时举止统造,统造角皆是60度.正在一个周期内6个晶闸管皆要被触收一次,触收程序依次为:VT1-VT2-VT3-VT4-VT5-VT6,6个触收脉冲相位依次出进60度.为了形成一个完备的电流回路,央供有二个晶闸管共时导通,其中一个正在共阳极组,其余一个正在共阳极组.晶闸管额定电压必须大于元件正在电路中本量启受的最大电压Um ,思量到电电网电压的动摇战支配过电压等果素,还要搁宽2~3倍的仄安系数,即按下式采用UTN=(2~3)UM ,式中系数2~3的与值应视运止条件,元件品量战对付稳当性的央供程度而定.对付于本安排,UM=√6 U2,故估计的晶闸管额定电压为UTN=(2~3)√6 U2=(2~3) ×294=588~882V , 与1000V为使晶闸管元件不果过热而益坏,需要按电流的灵验值去估计其电流额定值.即必须使元件的额定电流灵验值大于流过元件本量电流的最大灵验值.可按下式估计:IT (A V )=(1.5~2)KfbIMAX ,式中估计系数Kfb=Kf/1.57Kb 由整流电路型式而定,Kf 为波形系数,Kb 为共阳极或者共阳极电路的支路数.当α=00时,三相齐控桥电路Kfb=0.368,故估计的晶闸管额定电流为IT (A V )=(1.5~2)KfbIMAX =(1.5~2) ×0.368×(100×1.5)=82.8~110.4A ,与100A.4.1.4 电抗器电感量估计由于电效果电枢战变压器存留漏感,果而估计直流回路附加电抗器的电感量时,要从根据等效电路合算后供得的所需电感量中,扣除上述二种电感量.使输出电流连绝的临界电感量的估计公式:211mind U L K I = (3) 式中 u2为晶闸管拆置接流侧的电流相电压灵验值, Id min 为央供连绝的最小背载电流仄衡值,K l 为与整流主电流形式有关的系数,查参照资料[1]中的表6-6中的序号2.11200.69316.65%100L mH =⨯=⨯(4)然而正在电机回路中包罗电机电感战变压器每相的漏感,本量中加电感比(4)式央供的小.电机电感公式如下:3102D D D dU L K PnI =⨯ (5) 式中UD 战ID 为电效果的额定电压战额定电流, n 战p 为电效果的额定转速战磁极对付数,KD 为估计系数,对付于普遍无补偿电机KD=8212,LD-为单位为mH很明隐 N nom=1470r/min 时,p=23220810 2.99221470100D L mH =⨯⨯=⨯⨯⨯ (6) 合合到变压器二次每相的漏感LB 估计公式%100k z B B dU U L K I =⨯ (7) 式u2--------晶闸管拆置接流侧的电流相电压灵验值 Id-------晶闸管拆置直流侧的额定背载电流uk%------变压器的短路比,按参[1]中的ξ6-1估计KB-------与整流主电路形式有关的系数,查参[1]表6-6中的序号3LB-------单位为mH51203.90.234100100B L mH =⨯⨯= (8) 与背载串联的节造电流脉动的本量临界电感量(2)la l D B L L L L =-+ (9)4.2、触收电路安排由于集成触收电路不然而成本矮、体积小,而且另有调式简单、使用便当等便宜,故本安排采与KJ041集成触收电路.KJ041为6路单脉冲产死器,它是三相齐空桥式电路的触收器,它具备单脉冲产死战电子开关启锁等功能.KJ041真用电路如图4所示,移相触收器输出脉冲加到该器件的1~6端,器件内的输进二极管完毕“或者”功能,产死补脉冲,该脉冲经搁大后分6路输出.当统造端7接逻辑“0”电通常,器件内的电子开关断开,各路输出触收脉冲.采与KJ041集成触收电路的共步电压应滞后于主电路电压180度.本安排主电路整流变压器采与D ,y-11联结,共步变压器采与D ,y5-11联结.那时,共步电压采用的停止睹表一.图4触收电路表一 各晶闸管的共步电压4.3. 安排器参数安排根据安排央供δi≤5%,而且/0.0277/0.00377.510l i T T s s ∑==,可按典型I 型系统安排,电流安排器采用PI 型,其传播函数如下:1W (s)=K i ACR i i s sττ+ 1、 电流安排器参数估计三相桥式电路每个波头的时间是3.3ms ,为了基础滤仄波头应有(1~2)Toi=3.33ms,果此与Toi=0.002s ,查参[2]中表1-2得,三相桥式电路的仄衡得控时间TS=0.0017s ,T∑i=Ts+ Toi=0.0037s ,其余参数如下:0.6R ∑=Ω,100.0671.5100im nom U I βλ===⨯,9.55m e C C =,2375m GD R T CeCm∑=,2200.261000.132min/1470nom a nam e nom U R I C V r n --⨯===• 116.6L L mH ∑==,316.6*100.02770.6l L T s R -∑∑=== 电流安排器超前时间常数:=0.0277i l T s τ=2. 校核验近似条件: 电流环停止频次:10.50.5135.10.0037ci I i W K s T -∑==== (1) 晶闸管整流拆置传播函数的近似条件谦脚近似条件(2) 忽略反电动势变更对付电流环动背效率的条件谦脚近似条件(3) 电流环小时间常数近似处理条件谦脚近似条件依照以上参数,电流环不妨达到的动背指标为:δi%=4.3%<5%.谦脚央供.4.3.2 速度安排器的安排按跟随战抗扰本能皆较佳的准则,与h=5;根据所测测速收电机纹波情况,与Ton=0.01s ;电流环等效时间常数为20.0074i T s ∑=;由于安排央供无静好,转速安排器必须含有积分关节;又根据动背央供,应按典型ӀӀ型系统安排转速环.故ASR 采用PI 安排器,其传播函数为1、 速度安排器参数估计2、 校核验近似条件:转速环停止频次为(1)电流环传播函数简化条件为谦脚简化条件(2)转速环小时间常数近似处理条件为谦脚简化条件3、 校核转速超调量当h=5时,max %81.2%b C C ∆=,而1000.6/min 454.5/min 0.132dnom nom e I R n r r C ⨯∆===,果此 谦脚安排央供4.4、呵护电路安排1、过电流保正在电路中串接的器件是赶快熔断器,那是一种最简朴灵验而应用最一致的过电流呵护元件,其断流时间普遍小于10ms ,熔断器与每一相串联,稳当的呵护晶闸管元件. 图5 过流呵护熔体额定电流Ikr 的采用I Ta 1.57=I KR ,不妨与I KR =170A, 额定电压选500伏.2、过压呵护(1)接流侧过压呵护如图6所示,用三组阻容(R1C1)串联形成的Y 链接,电阻电容估计如下:02216%()TM S C i uF U ≥,耐压为12()C U V ≥1)R ≥Ω,电阻功率:21(3---4)()R c P I R W ≥,其中62210()c I fC A π-=⨯上头公式中,STM 为变压器每相仄衡估计容量(V A ),U2为变压器二次相电压灵验值(V ),i0%为励磁电流百分数,当STM 小于几百伏安时i0%为10,当STM 大于一千伏安时i0%为3到%为变压器的短路比,当变压器容量正在10至1000KV A 时,Uk%正在5到10.202216%()=6414.71000/12024.5()TM S C i uF uF U ≥⨯⨯⨯=, C1与25微法.电容器的耐压UC1>1.5*1.414*120=254.52(V ), 与500V . 电阻的功率21(3---4)1.63 2.5=20---26.5()R P W ≥⨯()可采用2.5欧姆50瓦功率电阻.图6 过压呵护(2)晶闸管换相过电压呵护那种呵护可用RC与晶闸管并联如图6中所示,由参照资料[1]中表6-4查得:R=10ΩFμ.五系统电路图及电路处事本理为了赢得良佳的静、动背本能,转速战电流二个安排器普遍皆采与PI安排器.二个安排器的输出皆是戴限幅效率的,转速安排器ASR的输出限幅电压Uim*决断了电流给定电压的最大值,电流安排器ACR的输出限幅电压Ucm节造了电力电子电换器的最大输出电压Udm.系统组成的本理框图如下:图7 系统电路本理图ASR—转速安排器,ACR—电流安排器,TG—测速收电机,TA—电流互感器,UPE—电力电子变更器,Un*—转速给定电压,Un—转速反馈电压,Ui*—电流给定电压,Ui—电流反馈电压电路处事本理:单关环统造直流调速系统的个性是电效果的转速战电流分别是由二个独力的安排器去统造,且转速安排器的输出便是电流安排器的给定,果此电流环不妨随转速的偏偏好安排电效果电枢的电流.当转速矮于给定转速时,转速安排器的积分效率是输出减少,即电流给定降下,并通过电流环安排使电效果电流减少,进而使电效果赢得加速转矩,电效果转速降下.当本量转速下于给定转速时,转速安排器的输出减小,即电流给定减小,并通过电流安排是电流下落,电效果将会果为电磁转矩下落而减速,正在当转速安排器鼓战输出达到限幅值时,电流环即以最大电流I dm真止电效果的加速,是电效果的开用时间最短,正在可顺调速系统中真止电效果的赶快造动.正在不可顺调速系统中,由于晶闸管整流器不克不迭通过反背电流,果此不克不迭爆收反背造动转矩而使电效果赶快造动.六系统仿真正在MATLAB的simulink中拆修单关环调速系统仿真模型如图8所示,模型由晶闸管-直流电效果组成的主回路战转速电流安排器组成的统造回路二部分组成.其中的主电路部分、接流电源、晶闸管整流器、触收器、移相统造关节战电效果等关节使用POWER SYSTEM模型库中的模块;统造回路主体是转速战电流二个安排器以及反馈滤波关节.模型中转速反馈战电流反馈均与自电效果丈量单元的转速战电流输出端,电流安排器的输出端接移相个性模块shifter的输进端,而电流安排器的输出限幅便决断了统造角的范畴.图9至图12分别为图8的仿真停止,其中图9为电效果转速直线,图10 为电效果电枢电流波形,图11的上图为速度环安排器限幅输出,图11的下图为速度环缺面旗号波形,图12的上图为电流环安排器限幅输出,图12的下图为电流环缺面旗号.从转速战电流波形不妨瞅到,正在开用阶段电效果以恒流开用,约莫正在秒时开用中断,电枢电流下落到整,转速降下到1500r/min.纵然转速已经超调,电流给定已经变背,然而是本系统为不可顺调速系统晶闸管整流拆置不克不迭爆收反背电流,那时电枢电流为整,电效果的电磁转矩也为整(如图13所示),不反背造动转矩,又果为是正在理念空载开用状态,所以电效果脆持正在最下转速状态.正在2.5秒时加上背载(图8中Ramp框图,斜率为100/s,限幅正在140),电效果转速下落,ASR开初退鼓战,电流环收挥安排效率,通过1.4秒电效果开初宁静正在给定转速上.6.2. 断开速度环后的调速系统仿真正在图8的仿真模型图中,用一个开关串正在速度反馈通讲中,当开关关适时系统为速度、电流单关环系统,当开关断开时系统处于速度开环而电流关环的情况,那不妨钻研速度开环时系统运奇迹态,图14为速度环断开后的系统仿真图.图15、图16表示仿真停止时间为12秒时的速度环断环后的波形,速度环正在4.5秒断环后,电流环给定为最大,由于电流环仍旧是关环的,使定子电流追踪最大值降下到150安培,转速也降下.与此共时,电流环积分器输出不竭降下电流环安排器输出较大,经限幅后支到shifter的输进端,统造移相角,欲使三相整流电路输出电压减小,由于小于电效果反电势,三相整流电路晶闸管不导通,三相整流电路停止背电机供电,所以定子回路电流为整.电流缺面及电流环输出皆最大.电机正在惯性效率下戴动背载,电机转速下落,反电势也下落.当反电势下落到一定程度时,反电势小于整流电路的输出电压,三相整流电路再次背电机供电,定子电流赶快降下,电流缺面及电流环积分器输出下落,统造移相角,使转速降下.随着转速降下反电势跟着降下,与此共时,电流环积分器输出不竭降下,当电流环安排器输出较大时,将再次统造移相角,欲使三相整流电路输出电压再次减小,那样不竭沉复以上历程.图8 仿真模型图9 电效果转速图10 电效果电枢电流波形图11 上图为速度环安排器限幅输出,下图为速度环缺面旗号(Ud1波形)图12 上图为电流环安排器限幅输出,下图为电流环缺面旗号(Ud2波形)图13 电磁转矩图14 速度环断开后的仿真系统图(a)转速(b)电枢电流图15速度环断开后的速度及电枢电流波形(a)shift输进(上)与电流缺面(下)(Ud2波形)(b)速度环输出(上)与速度缺面(下)(Ud1波形)图16 统造回路波形七心得体验写出各自的心得体验,着沉正在安排与调试的体验八参照书籍目4.电力电子应用技能,莫正康,第三版,板滞工业出版社,2000。
双闭环晶闸管不可逆直流调速系统设
双闭环晶闸管不可逆直流调速系统是一种用于电机调速的控制系统,主要由两个闭环控制组成:速度闭环和电流闭环。
以下是该系统的一般设备组成和工作原理的概述:
设备组成:
电源:提供系统所需的电能供应。
整流器:将交流电源转换为直流电源。
晶闸管:用于控制电流的开关器件,通过控制晶闸管的导通和截止来调节电机的电流。
逆变器:将直流电源转换为可调的交流电源。
电机:用于将电能转换为机械能的设备。
速度传感器:用于检测电机转速,并将其反馈给控制系统。
电流传感器:用于检测电机电流,并将其反馈给控制系统。
控制器:根据速度和电流反馈信号,控制晶闸管的导通和截止,调节电机的转速和负载电流。
工作原理:
速度闭环控制:控制器通过速度传感器获取电机的转速反馈信号,并与设定的目标转速进行比较。
根据误差信号,控制器输出相应的控制信号,通过调节逆变器的输出电压来控制电机的转速,使实际转速逐渐接近目标转速。
电流闭环控制:控制器通过电流传感器获取电机的电流反馈信号,并与设定的目标电流进行比较。
根据误差信号,控制器输出相应的控制信号,通过控制晶闸管的开通和截止时间来调节电机的负载电流,使实际电流逐渐接近目标电流。
反馈控制:速度和电流的反馈信号被用来调整控制器的输出信号,以实现对电机转速和负载电流的精确控制。
系统保护:系统还可以包括过电流保护、过温保护等功能,以确保系统的安全运行。
双闭环晶闸管不可逆直流调速系统可以实现对直流电机的精确调速和负载电流控制,适用于需要高精度和可靠性的工业应用。
该系统在电机调速和负载控制方面具有较好的性能和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四 电路的设计
双闭环调速系统的动态结构框图如图2所示。在双闭环系统中,按照设计多环控制系统原则(先内环后外环),应该首先设计电流调节器,然后把整个电流内环看作是转速调节器中的一个环节,再设计转速调节器。在设计的过程中需对电流环和转速环进行近似处理和结构化简,从而确定调节器的结构,以利于后续的模拟电路设计和参数计算。
n=(Ud/CeФ)-(RO+Ra)T/ CeCTФ2(1)
式中:Ud整流电压,RO整流装置内来自,由式(1)可知,改变Ud,即可改变转速n。
图3三相全控桥整流电路
4.1.2、整流变压器容量计算
1、变压器次级电压
为了保证负载能正常工作,当主电路的接线形式和负载要求的额定电压确定之后,晶闸管交流侧的电压U2只能在一个较小的范围内变化,为此必须精确计算整流变压器次级电压U2。影响U2值的因素有:(1)U2值的大小首先要保证满足负载所需求的最大直流值Ud;(2)晶闸管并非是理想的可控开关元件,导通时有一定的管压降,用UT表示;(3)变压器漏抗的存在会产生换相压降;
电力拖动自动控制系统
课程设计报告
班级:自动1102
姓名:张 晨
学号:111401217
指导老师:谢 勇
扬州大学信息工程学院自动化专业部
2014年12月29日至2015年1月4日
一 课程设计目的和意义()
二 技术指标和设计要求()
2.1. 技术数据
2.2. 设计要求
三 系统方案选择()
四 电路的设计()
(4)平波电抗器有一定的直流电阻,当电流流经该电阻时就要产生一定的电压降;(5)电枢电阻的压降。综合以上因素得到的U2精确表达式为:
由于本课题既要求系统稳态无静态,又有较高的动态性能指标,因而选用双闭环调速系统。转速、电流双闭环直流调速系统的方框图如图1所示。
图1 转速、电流双闭环直流调速系统
TA---电流互感器 ACR---电流调节器 TG---测速发电机
ASR---转速调节器 UPE---电力电子变换器 Un* ---转速给定电压 Un ---转速反馈电压 Ui* ---电流给定电压
2. 掌握自动控制系统的计算机仿真技术
3.学会收集、分析、运用自动控制系统设计的有关资料和数据
4.通过对系统的设计、仿真调试,培养独立工作能力、分析问题解决问题的能力。
5. 培养编制技术总结报告的能力。
二 技术指标和设计要求
2.1. 技术数据
直流电动机额定参数为:Unom=220V, Inom=100A, Nnom=1470r/min,Ra=0.26Ω, =16N.m2,λ=1.5,励磁电压Uf=220V,励磁电流If=1.5A。给定电压最大值为10V。晶闸管整流装置:Ks=30。系统主电路 。
4.1.主电路设计()
4.2. 触发电路设计()
4.3. 调节器参数设计()
4.4. 保护电路设计()
五 系统电路图及电路工作原理()
六系统仿真模型()
6.1.双闭环直流调速系统仿真电路图()
6.2.断开速度环后系统的仿真波形()
七心得体会()
八参考书目()
一 课程设计目的和意义
1. 熟悉自动控制系统设计的一般原则、设计内容以及设计程序的要求,掌握工程设计的方法。
图2 双闭环调速系统的动态结构框图
4.1、主电路设计
4.1.1设计思路
本设计中直流电动机由单独的可调整流装置供电,三相全控桥整流电路是目前应用最广泛的整流电路,其输出电压波动小,适合直流电动机的负载,并且该电路组成的调速装置调节范围广(将近50)。把该电路(如图3所示)应用于本设计,能实现电动机连续、平滑地转速调节、电动机不可逆运行等技术要求。通过调节触发延迟角а的大小来控制输出电压Ud的大小,从而改变电动机M的供电电压。由改变电枢电压调速系统的机械特性方程式
2.2.技术要求
1.该调速系统能进行平滑的速度调节,负载电机不可逆运行,具有较宽的调速范围(D≥10),系统在工作范围内能稳定工作
2.系统静特性良好,无静差(静差率s≤0.03)
3.动态性能指标:空载起动到额定转速时转速超调量δn<10%,电流超调量δi<5%,动态速降Δn≤8-10%
4.系统在5%负载以上变化的运行范围内电流连续
5.调速系统中设置有过电压、过电流等保护
6. 分析当速度环断开后系统工作情况
2.3.设计内容
1.根据题目的技术要求,确定调速系统方案,画出系统组成的原理框图。
2.调速系统主电路元部件的确定及其参数计算(包括有变压器、电力电子器件、平波电抗器与保护电路等)
3.动态设计计算:根据技术要求,对系统进行动态校正,确定ASR调节器与ACR调节器的结构型式及进行参数计算,使调速系统工作稳定,并满足动态性能指标的要求
4.分析当速度环断开后系统工作情况
5.对设计的系统进行计算机仿真
6.整理设计数据资料,撰写课程设计报告。
三 系统方案选择
在直流电机调速中主要有单闭环、双闭环的两种方案,单闭环结构简单,它采用转速负反馈和PI调节器可以在保证系统稳定的前提下实现转速无静差。但是,如果对系统的动态性能要求较高,例如:要求快速起制动,突加负载动态速降小等等,单闭环系统就难以满足需要。是因为在单闭环系统中不能随心所欲地控制电流和转矩的动态过程。在单闭环直流调速系统中,电流截止负反馈环节是专门用来控制电流的,但它只能在超过临界电流值以后,靠强烈的负反馈作用限制电流的冲击,并不能很理想地控制电流的动态波形。根据带电流截止负反馈的单闭环直流调速系统起动过程,起动电流达到最大值后,受电流负反馈的作用降低下来,电机的电磁转矩也随之减小,加速过程延长。理想起动过程的起动电流呈方形波,转速按线性增长。这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动过程。为了实现在允许条件下的最快起动,关键是要获得一段使电流保持为最大值的恒流过程。按照反馈控制规律,采用某个物理量的负反馈就可以保持该量基本不变,那么,采用电流负反馈应该能够得到近似的恒流过程。所以起动过程,采用电流负反馈,而在稳态运行时只采用转速负反馈,这就是转速、电流双闭环系统。为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。二者之间实行嵌套(或称串级)联接,这样构成的双闭环直流调速系统比单闭环系统有更好的动静态性能。