codesys脉冲定位指令
codesys 编程使用指南

codesys 编程使用指南Codesys是一种常用的编程工具,用于开发和编写嵌入式系统的控制程序。
本文将为读者提供一份Codesys编程使用指南,帮助初学者快速入门并掌握基本的编程技巧。
一、Codesys简介Codesys是一种基于IEC 61131-3标准的集成开发环境(IDE),支持多种编程语言,包括结构化文本(ST)、图表(IL)、功能块图(FBD)、连续功能图(CFC)和顺序功能图(SFC)。
它可以在不同的硬件平台上运行,并与多种通信协议兼容。
二、Codesys安装和配置1. 下载Codesys软件并按照安装向导进行安装。
2. 打开Codesys软件,选择合适的硬件平台和通信协议。
3. 配置硬件设备的参数,如IP地址、端口号等。
4. 创建一个新项目,选择编程语言和存储位置。
三、Codesys编程基础1. 了解IEC 61131-3编程规范,熟悉不同的编程语言和它们的特点。
2. 学习如何声明和定义变量,包括数据类型、范围和初始值。
3. 掌握条件语句(如if-else)和循环语句(如for和while),用于控制程序的流程。
4. 学习如何定义和调用函数块,实现代码的模块化和重用。
5. 掌握如何使用定时器和计数器,实现定时任务和计数功能。
6. 学习如何处理错误和异常情况,编写健壮的程序代码。
7. 熟悉调试工具和技巧,能够有效地定位和修复程序中的错误。
四、Codesys高级编程技巧1. 学习如何使用结构体和数组,组织和管理复杂的数据结构。
2. 掌握面向对象编程(OOP)的基本概念和技巧,提高代码的可维护性和重用性。
3. 学习如何与外部设备进行通信,包括传感器、执行器和其他控制系统。
4. 了解代码优化和性能调优的技术,提高程序的执行效率和响应速度。
5. 学习如何进行版本控制和团队协作,保证多人开发的代码质量和一致性。
五、Codesys实例应用1. 开发一个简单的闹钟程序,实现定时提醒功能。
2. 设计一个温度控制系统,根据温度传感器的数值调整加热器的功率。
codesys 指令系统

codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
codesys 指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
codesys所有函数的详细说明.
二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
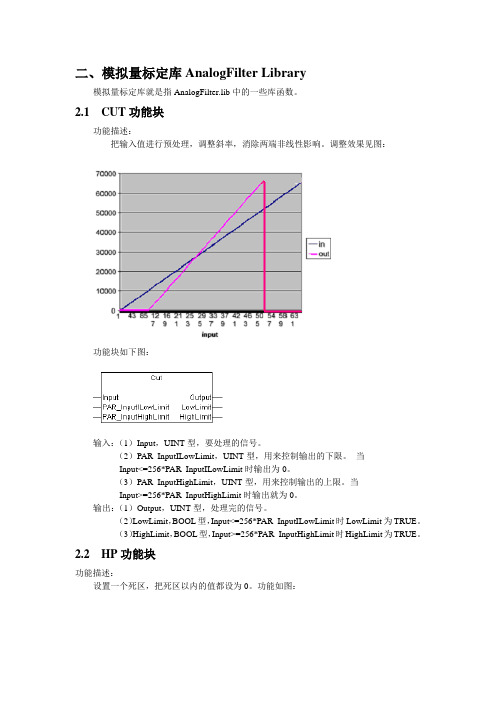
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
竞赛定位控制指令

步进 电机
电源 限位
丝杆
滑
电源
台
限位
原点位
M104
[S1.] [S2.] [S3.] [D.]
[ZRN K1000 K100 X004 Y000]
• 1)[S1]:指定开始原点回归的速度。16位运算时 设定范围:10~32767 Hz;32位运算时设定范围 :10~100,000Hz;
• 2)[S2]:指定爬行速度,接近点(DOG)信号 ON后的低速。设定范围:10~32767 Hz;
M8050为ON时,输 入中断I00□中断禁 止
M8057(定时中断)I7□□禁止
M8058(定时中断)I8□□禁止
中断指令的梯形图如下图所示:
从图中可看出,主 程序中允许中断指 令EI及不允许中断 指令DI间的以开放 中断的程序段。主 程序带有多个中断 子程序时,中断标 号和距其最近的一 处中断返回指令构 成一个中断子程序 。FX2N系列PLC可实 现不多于二级的中
•中断受中断禁止特殊辅助继电器M8050~M8059的控制。
输入中断
输入中断指针
中断禁 止
I00□ (X0) I10□ (X1) I20□ (X2) I30□ (X3) I40□ (X4) I50□ (X5)
M8050 M8051 M8052 M8053 M8054 M8055
□=1时上升 沿中断
❖ 中断返回
X0
FNC03 IRET
开中断 FNC04 EI
关中断 FNC05 DI ❖ 均无操作数 ❖ 梯形图
X10
I100
EI DI FEND
IRET
开中断范围 中断子程序1
I101
中断子程序2
IRET
codesys指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符 ::ADD:加法 :MUL:乘:SUB: 减:DIV: 除:MOD :求余 :2、Bitstring Operators:逻辑操作 ::AND :与:OR : 或:XOR :异或 :NOT :非:3、Bit-shift Operators: 移位操作 ::SHL : 左移 :SHR :右移 :ROL : 循环左移 :ROR :循环右移 :4、Selection Operators: 选择操作 :: 选择 : G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值 :MIN : 最小值 :LIMIT : 比较选择 ::IN>MAX:OUT:=MAX;IN<MIN :OUT:=MI N;MUX :多路选择 ::OUT:=MUX(IN0,⋯,INk,⋯INn); OUT:=Ink;5、Comparison Operators: 比较运算 ::GT : 大于 :LT : 小于 :LE:小于等于 :GE:大于等于 :EQ:等于 :NE : 不等于 :6、Address Operators: 地址 ::ADR7、Calling Operators:调用操作 ::CAL8、Type Conversion Functions :转型功能 ::BOOL_, : 布尔值转型 : :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL : 转型成布尔值 ::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL : 整数类型转换 :REAL_,/LREAL_, : 实数型 / 长实数型转型 ::INT等:TIME_,/TIME_OF_DAY 时:间转型 ::STRING/DW ORD/SINT 等 :DATE_,/DT_, : 日期转型 ::BOOL/INT/BYTE/ST RING 等:STRING_, : 字符串转型 ::BOOL/WORD/TIME 等:TRUNC :取整 :9、Numeric Functions : 数据计算功能 ::ABS : 取绝对值 :SQRT :开方 :LN : 取自然对数 :LOG :取对数 :EXP :e 求幂 :SIN : 正弦 :COS :余弦 :TAN: 正切 :ASIN: 反弦 :ACOS: 反余弦 :ATAN:反正切 : EXPT:求幂 :二、库文件 Library1、Standard.lib 标准库1.1,String function: 字符串运算 :: LEN : 长度计算 :LEFT:左取位 :RIGHT:右取位 :MID : 中间取位 :CONCAT 字:符串叠加 : INSERT :插入 :DELETE : 删除:REPLACE 代:替 :FIND : 查找 :1.2,Trigger : 触发保持 ::R_TRIG:上升沿保持 :F_TRIG:下降沿保持 :1.3,Counter : 计数器 ::CTU : 上升沿计数 :CTD : 下降沿计数 :CTUD :上升沿、下降沿计数 :1.4,Timer : 计时器 ::TP : 触发计时器 :TON :高电平计时器 :TOF : 低电平计时器 :RTC : 运行时钟计时器 :一、操作块 Operator1、IEC Operators: 运算符 ::ADD :加法 :MUL :乘:SUB : 减:DIV : 除:MOD :求余 :2、Bitstring Operators: 逻辑操作 :: AND :与:OR : 或:XOR :异或 :NOT :非:3、Bit-shift Operators: 移位操作 :: SHL : 左移 :SHR :右移 :ROL : 循环左移 :ROR :循环右移 :4、Selection Operators: 选择操作 :: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值 :MIN : 最小值 :LIMIT : 比较选择 ::IN>MAX:OUT:=MAX;IN<MIN :OUT:=MI N;MUX :多路选择 :: OUT:=MUX(IN0,⋯,INk, ⋯INn);OUT:=Ink;5、Comparison Operators: 比较运算 ::GT : 大于 :LT : 小于 :LE : 小于等于 :GE : 大于等于 :EQ : 等于 :NE : 不等于 :6、Address Operators: 地址 ::ADR7、Calling Operators: 调用操作 :: CAL8、Type Conversion Functions : 转型功能 ::BOOL_, : 布尔值转型 : :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL : 转型成布尔值 ::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL : 整数类型转换 :REAL_,/LREAL_, : 实数型 / 长实数型转型 ::INT 等 :TIME_,/TIME_OF_DAY 时:间转型 ::STRING/DWORD/SINT等: DATE_,/DT_, : 日期转型 ::BOOL/INT/BYTE/STRING 等 : STRING_, : 字符串转型 ::BOOL/WORD/TIME等:TRUNC :取整 :9、Numeric Functions : 数据计算功能 ::ABS : 取绝对值 :SQRT :开方 :LN : 取自然对数 :LOG :取对数 :EXP :e 求幂 :SIN : 正弦 :COS :余弦 :TAN : 正切 :ASIN : 反弦 :ACOS :反余弦 :ATAN :反正切 :EXPT :求幂 :二、库文件 Library1、Standard.lib 标准库1.1,String function: 字符串运算 :: LEN : 长度计算 :LEFT : 左取位 :RIGHT : 右取位 :MID : 中间取位 :CONCAT 字:符串叠加 : INSERT : 插入 :DELETE :删除 :REPLACE 代:替 :FIND : 查找 :1.2,Trigger : 触发保持 ::R_TRIG : 上升沿保持 :F_TRIG : 下降沿保持 :1.3,Counter : 计数器 ::CTU : 上升沿计数 :CTD : 下降沿计数 :CTUD :上升沿、下降沿计数 : 1.4,Timer : 计时器 ::TP : 触发计时器 :TON :高电平计时器 :TOF : 低电平计时器 :RTC : 运行时钟计时器 :。
CoDeSys编程手册

codesys基本指令手册(C)

日立工业用控制器系列应用手册(服务手册)指令参考篇○质保期限及质保范围交货物品的质保期限自订单交到指定地点后一年。
在该质保期中,按照本使用说明书要求在产品规格范围内的正常使用状态下发生故障时,将对该机器的故障部分免费予以更换或修理。
但是,下列情况并不在本保证范围之列:(1) 需方的不当操作及使用所致;(2) 故障系交货物品以外的原因所致;(3) 非交货人实施的改造或修理所致;(4) 其他因天灾、灾害等非交货方责任所致;此处所涉及的保证是对交货物品部分的保证,由交货物品的故障所引发的损害并不在列。
并且,保证仅在日本国内有效。
○有偿修理质保期限(一年)后的检查及修理均为有偿。
并且,即使在质保期限内,上述质保范围之外的原因所导致的故障修理及故障原因调查将有偿进行,请联系购货经销商或售后维修站。
(但是有些故障点可能无法进行故障原因调查,敬请谅解)○部件订购或咨询当您需要与我们联系关于产品故障、部件订购或咨询其他事项时,请准备好以下几项信息,然后与购货经销商或售后维修站联系:(1) 型号(2) 制造编号(MFG.NO.)(3) 故障内容○需要阅读此手册的人员此手册适用于以下人员阅读:・PLC导入研究人员・PLC系统设计人员・PLC机器安装、连接人员・PLC导入后的管理人员安全注意事项安装、运行、维修及检查前,请务必熟读本使用说明书和其他相关资料,并正确使用。
请在充分掌握机器知识、了解安全信息和注意事项后再使用。
并且,请务必将此手册交由最终维护人员管理。
此手册中,安全注意事项被分为“危险”和“注意”两个等级。
而且,有些情况下标记的内容也可能引起严重事故。
无论哪种注意事项,它们都包含了重要的信息,请务必遵守。
禁止和强制的标志说明如下::表明禁止的事项(不可操作)。
例如:当禁止明火的时候,则显示:表明强制的事项(必须做)。
。
1. 安装3. 使用注意事项版本修订记录目录1.1 变量 ............................................................................................................................................................. 1-1 1.2 常量 ............................................................................................................................................................. 1-2 1.3 局部变量与全局变量 ................................................................................................................................. 1-2 1.4 数据类型 ..................................................................................................................................................... 1-4 1.5 指令一览表 ................................................................................................................................................. 1-5代入指令 ..................................................................................................................................................... 2-1 算数运算指令 ............................................................................................................................................. 2-2 逻辑运算指令 ............................................................................................................................................. 2-7 比较运算指令 ............................................................................................................................................. 2-11 移位指令 ..................................................................................................................................................... 2-17 选择指令 ..................................................................................................................................................... 2-21 数值运算指令 ............................................................................................................................................. 2-27 类型转换指令 ............................................................................................................................................. 2-39定时器与计数器 ......................................................................................................................................... 3-2 触发器(边沿检测) ................................................................................................................................. 3-14 flip-flop(双稳电路) ................................................................................................................................ 3-16 字符串 ......................................................................................................................................................... 3-20 系统时间指令 ............................................................................................................................................. 3-29 EtherCAT通信指令..................................................................................................................................... 3-38 Modbus-RTU/TCP通信指令 ...................................................................................................................... 3-74 HX-CPU专用指令 ...................................................................................................................................... 3-87 通用串行通信指令....................................................................................................................................... 3-1044.1 LD(梯形图逻辑图) ................................................................................................................................ 4-1 4.2 FBD(功能块图)...................................................................................................................................... 4-3 4.3 IL(指令表) ............................................................................................................................................. 4-4 4.4 ST(结构文本)......................................................................................................................................... 4-5 4.5 SFC(顺序控制功能图) .......................................................................................................................... 4-7 4.6 CFC(连续功能图).................................................................................................................................. 4-105.1 概要 ............................................................................................................................................................. 5-1 5.2 POU编辑例 ................................................................................................................................................. 5-2 5.3 库编辑例 ..................................................................................................................................................... 5-7第1章变量与常量用户程序中可以使用半角英文字母数字及日文。
台达CODESYS运动控制方案说明书

目录台达 CODESYS 运动控制方案产品介绍运动控制器现场装置人机界面软件硬件规格选型说明产品信息台达 CODESYS 运动控制方案自动化和数字化在智能制造时代中扮演重要的角色。
机械制造商为了增加竞争力,积极寻找可以快速扩展设备开发和应用的方法,以减少机台建造所需投入的时间和人力。
台达和 CODESYS 集团合作,开发以CODESYS 平台为基础的全新运动控制解决方案。
CODESYS 平台为一符合IEC 61131-3标准且容易上手的整合平台。
此平台丰富的运动控制功能可以支持全球使用者多样化的应用,并方便落实到现有设备。
台达 CODESYS 运动控制方案整合PLC 、HMI 、和运动控制器的控制功能,并将其运用在不同的新产品中,包括PC-Based 运动控制器AX-864E 系列和PLC-Based 运动控制器AX-308E 系列。
此方案通过EtherCAT 运动总线,可同步控制台达交流伺服驱动器ASDA-A3-E 、ASDA-B3-E 、ASDA-A2-E 等系列、精巧标准型矢量控制变频器MS300 / MH300系列、泛用型矢量控制变频器C2000 Plus 系列、远端模块R1-EC 系列和DVP EtherCAT 远端I/O 模块。
完善、整合性高的台达 CODESYS 运动控制方案,可满足多样的应用需求。
PC-Based 运动控制器AX-864E 系列PLC-Based 运动控制器AX-308E 系列伺服驱动器PC-Based PLC-Based人机界面远端I/O 模块變頻器ASDA-A2-EASDA-A3-EASDA-B3-EAX-864EAX-308EDOP-100R1-ECDVP(EtherCAT 远端I/O 模块)C2000 PlusMH300MS300软件运动控制器现场装置●使用符合国际 IEC 61131-3 规范的CODESYS SoftPLC 开发软件和SoftMotion ●最多可支持 64 轴●无排线、无风扇的标准工业计算机等级架构 ●Intel x86 CPU●内置安全IC 系统,提升软硬件安全性 ●低电压检测机制和资料覆写功能 ●内置8组高速输入/输出接口●适合运用于工业机器人、木工、印刷、包装、印刷等行业●AX-308E CPU 最多可支持 8 轴 EtherCAT 伺服 (最短同步时间: 8轴 / 2 ms )●支持台达PLC AS 系列电源、数字IO 、模拟IO 和温度扩展模块 ●高效能: 基本指令的最短执行时间为5 ns●提供常用指令如位置、速度、扭矩、多轴补间、E-gear 、ECAM 等指令●内置16组DI 、8组DO 、2组增量编码器、SSI 绝对型编码器、RS232/485、Ethernet 和EtherCAT 通讯接口PC-Based 运动控制器AX-864E支持EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供全面和整合的运动控制解决方案PLC-Based 运动控制器AX-308E支持 EtherCAT 通讯协议和基于CODESYS 的编辑软件,提供不同行业实时弹性的运动控制解决方案运动控制器现场装置交流伺服系统符合IEC 61158和IEC 61800-7现场总线标准;支持CiA402规格中所有CoE 模式和各项EtherCAT 命令模式ASDA-A2-EASDA-B3-EASDA-A3-E●CODESYS 原厂认证●通过ETG (EtherCAT Technology Group)兼容性测试认证 ●支持绝对型和增量型编码器伺服电机 ●支持高速位置抓取功能●ASDA-A3-E 和ASDA-A2-E 内置符合SIL2 (IEC EN 61508 & IEC 62016) / Cat. 3 PL=d (ISO 13894-1)标准的安全扭矩停止功能 (STO, Safe Torque Off)●高阶交流伺服驱动器●同步周期短,适用于多轴高速同步控制 ●支持绝对型和增量型ECMA 系列电机●电机功率范围: 200 V 100 W ~ 3 kW 、400 V 400 W ~ 7.5 kW●标准型交流伺服驱动器●3.1 kHz 速度响应频宽,缩短40%整定时间 ●高速轴间资料交换,提供简易龙门控制功能 ●兼容 A2 / B2 / A 3 系列电机,替换方便●电机功率范围: 200 V 100 W ~ 3 kW●高效能运动控制型交流伺服系统 ●3.1 kHz 速度响应频宽,提升设备产能●全新的挠性结构补偿和低频抑制功能,确保机台稳定度和缩短整定时间●薄型化设计,节省电器柜安装空间●电机功率范围: 200 V50 W ~ 15 kW台达 CODESYS 运动控制方案产品介绍精巧高效型 / 标准型矢量控制变频器MH300 / MS300体积精巧,内置安全扭矩停止功能STO 和EMC 滤波器,整合PLC ,支持多样的通讯协定和I/O 扩展模块高效能泛用型矢量控制变频器C2000 Plus精准的速度/扭矩/位置控制模式,内置PLC ,适用于有感测器/无传感器的同步与异步电机●功率范围: 115 V 0.2 kW ~ 0.75 kW 、230 V 0.2 kW ~ 15 kW 、460 V 0.4 kW ~ 22 kW●支持感应电机与永磁电机,开环/闭环控制 ●最高输出频率: 最高 2000 Hz / 1500 Hz●内置符合SIL2 (IEC EN 61508 & IEC 62016) /Cat.3 PL d (ISO 13894-1)标准的安全扭矩停止功能 STO (Safe Torque Off) ●內建PLC (5K / 2K steps)● 支持多样的通讯协定: Modbus 、CANopen 、EtherCAT 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP●电源模块: 连接EtherCAT 从站模块与100 BASE-TX EtherCAT 网络 ●数字输入模块: 16点Sink/Source 数字输入模块; 1 ms 和2 ms 的反应时间●数字输出模块: 6点数字输出模块; 输出电流:sink 型模块每点0.5 A ,source 型模块每点0.25 A ●ADC 模块: 4通道16-bit A / D 输入; DAC 模块: 4通道16-bit D / A 输出 ●运动模块: 单轴脉冲输出●手轮模块: 单通道手轮输入,4 / 6轴控制●EtherCAT 耦合器RTU-ECAT :内置2个EtherCAT 通讯端口,最多可支持8个DVP 薄型I/O 模块●数字输入模块: 支持8 / 16 / 32点NPN / PNP 输入 ●数字输出模块: 支持8 / 16/ 32点NPN / PNP/继电器输出●数字I/O 模块: 8点数字输入和8点数字输出,支持不同型态的输入/输出格式 ●模拟输入模块: 4 / 6通道,支持mA / V 输入 ●模拟输出模块: 2 / 4通道,支持mA / V 输出●数字I/O 模块: 4通道数字输入和2通道数字输出模块,支持mA / V 输入/输出型式●温度模块: 2 / 4 / 6 / 8通道,支持RTD 、热电偶和NTC 输入(注:详细信息请参照DVP 系列PLC 型录)●功率范围: 230 V 0.75 kW ~ 90 kW 、460 V 0.75 kW ~ 560 kW ●高过载承受度: 150 % / 60 秒和180 % / 3 秒,适用于恒定转矩应用 ●内置PLC (10k steps) ●支持点对点位置控制●采用3C3标准PCB 涂层,可确保变频器在恶劣环境下安全可靠运行●内置Modbus ,支持通讯扩展卡: CANopen 、EtherCAT 、ROFINET 、PROFIBUS DP 、DeviceNet 、Modbus TCP 、EtherNet/IP远端I/O 模块R1-EC ( AX-864E 适用)耐用精巧的E-bus 从站模块,适用于高精度和高需求的产业应用远端I/O 模块RTU-ECAT (PLC DVP 薄型RTU 方案)适合多种应用的精巧EtherCAT 远端I/O模块方案现场装置台达 CODESYS运动控制方案产品介绍1 ms(sink/source)反应时间(sink/source) 反应时间制造设备程序控制第三方控制器AX-864EAX-308EEthernet运动控制编程软件 - Softmotion●支持单轴和多轴运动(主/从轴运动和凸轮控制) ●使用PLCopen 认证的POU库,编辑运动控制功能●图形化CAM 编辑软件整合配置、编程、编译、和调适功能; 无缝整合传统和系统性的编程方式●在SoftPLC 和控制器的runtime 模拟模式下显示应用资料 ●在监视列表中监看指定的数值●直接在对应的编辑器中读、写、和强制设定变量●单步或单周期执行程序码支持标准 IEC 61131-3 编程●结构化文本 (ST)●梯形图 (LD)工作与除错●功能块 (FBD)●顺序功能图 (SFC)产品信息电源输入接口DC 24 V (±15 %)SSI编码器输入接口SD 卡槽HDMI输出接口Gigabit LAN 接口(Modbus TCP / OPC UA)USB EtherCAT接口连接现场装置电源输入接口DC 24 V (±15 %)8组数字输入 / 8组数字输出OA / OB / OZ signalINC 编码器输入接口ABS SSI编码器输入接口外观说明外观说明137.4166.8141164153.2R2.5X2R1.4X2554.2PC-Based 运动控制器AX-864EPLC-Based 运动控制器AX-308E产品尺寸单位: mm产品尺寸单位: mm16组数字输入8组数字输出MicroSD 卡槽RS232 / 485接口EtherCAT接口增量型编码器输入接口 (×2)Ethernet接口连接现场装置硬件规格2021型号说明AX-864E P0MB1T产品类型AX - 3 系列AX - 8 系列I/O: (晶体管) T: NPN可控制轴数。
codesys轴组点动指令

codesys轴组点动指令
在 CODESYS 中,轴组点动指令通常用于控制运动轴的运动。
通过轴组点动指令,可以实现对多个轴同时进行点动控制,从而实现复杂的运动控制功能。
轴组点动指令通常涉及到以下几个方面:
1. 指令格式,在 CODESYS 中,轴组点动指令的格式通常包括指令名称、轴组号、速度、加速度、减速度等参数。
通过设置这些参数,可以实现对轴组的精确控制。
2. 轴组号,轴组点动指令需要指定轴组号,以确定需要进行点动控制的轴组。
通过指定轴组号,可以实现对特定轴组的控制,从而实现精准的运动控制。
3. 速度控制,轴组点动指令通常需要设置速度参数,以确定轴组的点动速度。
通过设置不同的速度参数,可以实现对轴组的不同速度控制,从而满足不同的运动控制需求。
4. 加减速度控制,除了速度控制外,轴组点动指令还通常需要设置加速度和减速度参数,以确定轴组的加减速度。
通过设置这些参数,可以实现对轴组运动的平滑控制,避免突然加速或减速对设
备造成的损坏。
总的来说,轴组点动指令在 CODESYS 中是实现多轴运动控制的重要指令之一,通过合理设置指令参数,可以实现对多个轴的精确控制,满足复杂的运动控制需求。
希望这些信息能够帮助到你。
codesys编程快速输入指令技巧

codesys编程快速输入指令技巧【最新版4篇】目录(篇1)1.概述2.codesys 编程的基本概念3.快速输入指令的方法4.常用指令的应用实例5.总结正文(篇1)1.概述codesys 是一种广泛应用于工业自动化领域的编程语言。
通过codesys,工程师可以轻松地实现复杂的控制逻辑和功能。
为了提高编程效率,本文将为您介绍一些快速输入指令的技巧。
2.codesys 编程的基本概念在 codesys 中,编程主要通过使用各种指令来实现。
指令分为基本指令和函数指令两种。
基本指令主要包括逻辑指令、算术指令、关系指令等,而函数指令则包括各种用于实现特定功能的子程序。
3.快速输入指令的方法为了快速输入指令,工程师可以采用以下方法:(1) 使用快捷键:codesys 编辑器中提供了丰富的快捷键,例如Ctrl+C 复制、Ctrl+V 粘贴等。
通过熟练使用快捷键,可以大大提高输入指令的速度。
(2) 使用代码模板:codesys 编辑器提供了代码模板功能,可以将常用的代码片段保存为模板,以便在需要时快速插入。
(3) 利用自动补全:在输入指令时,codesys 编辑器会自动提示可能的指令和函数,通过键盘上下箭头选择并按 Enter 键即可快速输入。
4.常用指令的应用实例以下是一些常用的 codesys 指令及其应用实例:(1) 逻辑指令:用于实现逻辑控制功能,例如 AND、OR、NOT 等。
例如,使用 AND 指令实现两个条件同时满足的控制逻辑。
(2) 算术指令:用于实现数学运算,例如 ADD、SUB、MUL 等。
例如,使用 ADD 指令实现两个数值的相加。
(3) 关系指令:用于实现比较操作,例如 EQ、NE、GT 等。
例如,使用 EQ 指令判断两个数值是否相等。
(4) 函数指令:用于实现复杂的功能,例如求最大值、最小值等。
例如,使用 MAX 函数指令求一组数值中的最大值。
5.总结通过以上介绍,我们可以看出,在 codesys 编程中,熟练掌握快速输入指令的技巧对于提高编程效率至关重要。
Codesys

Codesys
MC_Halt
在MC_MoveVelocity模式下,用MC_Halt停止其轴,当前轴的状态由
ContinuousMotion(当前转速)---》DiscreteMotion(速度不为0)---》Standstill(速度为0)。
MC_Stop
在MC_MoveVelocity模式下,用MC_Stop停止其轴,当前轴的状态由
ContinuousMotion---》Stopping---》StandStill(速度为0)
MC_Reset
当轴出错时,执行MC_Reset可清除轴错误,但不会掉使能。
执行复位功能块,也有可能报错;
当轴报错且错误代码为34时,很有可能是MC_Stop的Execute 一直为TRUE,此错误不需要用MC_Reset命令清除。
当取消MC_Stop的输入端Execute为FALSE后,就可以执行其他功能块。
MC_Power
在bRegulatorOn为TRUE且bDriveStart为TRUE时,给Enable 一个上升沿,MC_Power的输出Status就为TRUE。
上使能成功之后,即使修改输入端Enable为FALSE,其输出端Status仍然为TRUE。
MC_MoveVelocity
每次要更新轴的设定速度时,需要给MC_MoveVelocity输入端的Execute一个上升沿,设定的速度值才会被更新到轴状态中。
MC_GearIn
同MC_MoveVelocity,每次更新电子齿轮比并发挥作用,需要给MC_GearIn输入端Execute一个上升沿,电子齿轮比才会起作用。
MC_GearOut
脱离齿合后,轴以脱离时的速度继续转动。
codesys所有函数的详细说明.
二、模拟量标定库AnalogFilter Library模拟量标定库就是指AnalogFilter.lib中的一些库函数。
2.1 CUT功能块功能描述:把输入值进行预处理,调整斜率,消除两端非线性影响。
调整效果见图:功能块如下图:输入:(1)Input,UINT型,要处理的信号。
(2)PAR_InputILowLimit,UINT型,用来控制输出的下限。
当Input<=256*PAR_InputILowLimit时输出为0。
(3)PAR_InputHighLimit,UINT型,用来控制输出的上限。
当Input>=256*PAR_InputHighLimit时输出就为0。
输出:(1)Output,UINT型,处理完的信号。
(2)LowLimit,BOOL型,Input<=256*PAR_InputILowLimit时LowLimit为TRUE。
(3)HighLimit,BOOL型,Input>=256*PAR_InputHighLimit时HighLimit为TRUE。
2.2 HP功能块功能描述:设置一个死区,把死区以内的值都设为0。
功能如图:功能块如下图:输入:(1)Input,UINT型,输入信号。
. (2)PAR_CutLimit,UINT型,死区控制参数。
当Input<=65535*PAR_CutLimit%时输出为0。
输出:(1)Output,UINT型,处理完的信号。
2.3 JoyFilter功能块功能描述:JoyFilter块是一个双向的模拟量标定块,也就是说它对输入的模拟量进行预处理,把输出范围调整为-32767~32767。
功能块如下图:输入:(1)AnalogInput,UINT型,模拟量的输入信号。
(2)DI_JoystickDirSwitchPOS,BOOL型,正向微动开关。
当PAR_DirSwitchDiagnosticNotUse为FALSE时,此时又手柄向正向移动,那么只有正向微动开关TRUE,OUTPUT才会有输出。
codesys脉冲定位指令

codesys脉冲定位指令【原创版】目录1.Codesys 简介2.脉冲定位指令的概念与原理3.脉冲定位指令的应用4.示例:使用 Codesys 实现脉冲定位指令5.总结正文一、Codesys 简介Codesys 是一种用于工业自动化控制的编程语言,其基于结构化文本语言(ST)的语法,易于学习和使用。
Codesys 广泛应用于各种工业控制领域,如机器人、PLC、PAC 等,以实现设备间的通信和控制。
二、脉冲定位指令的概念与原理脉冲定位指令是一种在 Codesys 中用于控制脉冲执行的指令。
其基本原理是通过发送一定数量的脉冲来实现设备的定位。
脉冲定位指令的输入参数包括脉冲数量、脉冲间隔和脉冲阈值等。
通过调整这些参数,可以实现对设备的精确控制。
三、脉冲定位指令的应用脉冲定位指令在工业自动化领域有广泛的应用,如数控机床、机器人控制和自动化装配线等。
通过使用脉冲定位指令,可以实现设备的高精度定位和控制,提高生产效率和产品质量。
四、示例:使用 Codesys 实现脉冲定位指令以下是一个使用 Codesys 实现脉冲定位指令的示例:1.首先,在 Codesys 中创建一个新的工程,并添加相应的设备和通信接口。
2.然后,在程序中定义一个脉冲定位指令,设置脉冲数量、脉冲间隔和脉冲阈值等参数。
3.接下来,通过调用脉冲定位指令,发送脉冲信号到设备,实现设备的定位。
4.最后,通过监视设备状态,检测设备是否到达预定位置,并进行相应的控制。
五、总结总之,Codesys 中的脉冲定位指令是一种强大的控制工具,可以实现设备的精确定位和控制。
codesys脉冲定位指令

codesys脉冲定位指令
CODESYS的脉冲定位指令是一种用于控制驱动器或执行器实
现位置定位的指令。
脉冲定位指令可以根据设定的脉冲数或位置值,使驱动器或执行器在指定位置停止。
在CODESYS中,可以使用以下脉冲定位指令实现位置定位:
1. MOVPTP:该指令用于从当前位置移动到目标位置。
可以
通过指定脉冲数、位置值或位置变量来控制位置的移动。
示例:
```pascal
MOVPTP TargetPosition
```
其中,TargetPosition可以是一个脉冲数、位置值或位置变量。
2. PTPL:该指令用于从当前位置定位到目标位置,并在到达
目标位置后停止。
示例:
```pascal
PTPL TargetPosition
```
其中,TargetPosition可以是一个脉冲数、位置值或位置变量。
需要注意的是,具体的脉冲定位指令的使用方式和支持的参数可能会根据所使用的驱动器或执行器而有所不同。
因此,在使
用脉冲定位指令之前,建议查阅相关设备说明文档或资料,了解所使用的驱动器或执行器的具体要求和支持的指令。
codesys时钟脉冲指令
codesys时钟脉冲指令
在CODESYS中,有一个特殊的功能块被称为“定时器(TON)”块,用于生成时钟脉冲信号。
该块可以按照设定的时间间隔生成一个脉冲信号。
您可以在程序中使用该功能块来触发其他操作或执行特定的代码。
以下是一个示例程序,演示了如何使用TON块生成时钟脉冲信号:VAR Timer1: TON; Pulse: BOOL;END_VARTimer1(IN:=TRUE, PT:=T#1s, Q=>Pulse);IF Pulse THEN 执行代码例如:输出一个信号MyOutput := TRUE;END_IF在这个例子中,`Timer1`是一个TON块对象,被配置为在每秒生成一个脉冲信号。
通过在程序的逻辑中使用`Pulse`变量,您可以检测到这个脉冲信号,并在需要时执行相应的操作。
请注意,具体的代码实现可能会因使用的CODESYS版本和目标硬件而有所不同。
请参考相应的CODESYS文档和目标设备的规格说明来获取准确的指令和使用方法。
codesys 指令系统
codesys 指令系统一、操作块 Operator1、IEC Operators:运算符::ADD:加法:MUL:乘:SUB:减:DIV:除:MOD :求余:2、Bitstring Operators:逻辑操作::AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作::SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: 选择: G G:=FALSESELIN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE:小于等于:GE:大于等于:EQ:等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作::CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等:,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT等:TIME_,/TIME_OF_DAY :时间转型::STRING/DW ORD/SINT 等:DATE_,/DT_, :日期转型::BOOL/INT/BYTE/ST RING 等:STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能:: ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN:正切:ASIN:反弦:ACOS:反余弦:ATAN:反正切: EXPT:求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT:左取位:RIGHT:右取位:MID :中间取位:CONCAT :字符串叠加: INSERT:插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG:上升沿保持:F_TRIG:下降沿保持:1.3,Counter :计数器::CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数:1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:一、操作块 Operator1、IEC Operators:运算符::ADD :加法:MUL :乘:SUB :减:DIV :除:MOD :求余:2、Bitstring Operators:逻辑操作:: AND :与:OR :或:XOR :异或:NOT :非:3、Bit-shift Operators:移位操作:: SHL :左移:SHR :右移:ROL :循环左移:ROR :循环右移:4、Selection Operators:选择操作:: : G G:=FALSE 选择IN0 OUT OUT:=IN0IN1 G:=TRUEOUT:=IN1MAX :最大值:MIN :最小值:LIMIT :比较选择::IN>MAX: OUT:=MAX;IN<MIN :OUT:=MIN;MUX :多路选择::OUT:=MUX(IN0,…,INk,…INn);OUT:=Ink;5、Comparison Operators:比较运算::GT :大于:LT :小于:LE :小于等于:GE :大于等于:EQ :等于:NE :不等于:6、Address Operators:地址::ADR7、Calling Operators:调用操作:: CAL8、Type Conversion Functions :转型功能::BOOL_, :布尔值转型: :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL :转型成布尔值::BYTE/INT/TIME/STRING 等:INT_,_SINT/REAL :整数类型转换:REAL_,/LREAL_, :实数型/长实数型转型::INT 等:TIME_,/TIME_OF_DAY :时间转型::STRING/DWORD/SINT 等: DATE_,/DT_, :日期转型::BOOL/INT/BYTE/STRING 等: STRING_, :字符串转型::BOOL/WORD/TIME 等:TRUNC :取整:9、Numeric Functions :数据计算功能::ABS :取绝对值:SQRT :开方:LN :取自然对数:LOG :取对数:EXP :e 求幂:SIN :正弦:COS :余弦:TAN :正切:ASIN :反弦:ACOS :反余弦:ATAN :反正切:EXPT :求幂:二、库文件 Library1、Standard.lib 标准库1.1,String function:字符串运算:: LEN :长度计算:LEFT :左取位:RIGHT :右取位:MID :中间取位:CONCAT :字符串叠加:INSERT :插入:DELETE :删除:REPLACE :代替:FIND :查找:1.2,Trigger :触发保持::R_TRIG :上升沿保持:F_TRIG :下降沿保持:1.3,Counter :计数器:: CTU :上升沿计数:CTD :下降沿计数:CTUD :上升沿、下降沿计数: 1.4,Timer :计时器::TP :触发计时器:TON :高电平计时器:TOF :低电平计时器:RTC :运行时钟计时器:。
SSS公司的codesys的使用介绍

系统要求: 计算机:Intel Pentium或更高 操作系统:MS-Windows 9X/NT 4.0 内存:16MB RAM ( Windows 9X ) 64MB RAM (Windows NT 4.0) 至少10MB本机硬盘空间 鼠标 2倍速以上光驱 RS232串行口
RS232
通讯电缆
3
第二讲
低16 Bit,高16 Bit
16#0000,16#0000 16#5180,16#0001 16#4F80,16#3726 16#4380,16#386D 低16 Bit,高16 Bit 16#0000,16#0000
从1970-01-01 00时00分00秒开始以秒计算,占32 Bit地址空间
DT#1970-01-01-00:00:01
在ST中调用: Result:=Fct(7,2,4); 7 2 4
在FBD中调用: Fct PAR1 PAR2 PAR3
Result
6
第二讲
WAGO-I/O-PRO 32 中的POU
变量声明部分: FUNCTION_BLOCK FUB VAR_INPUT PAR1:INT; PAR2:INT; END_VAR VAR_OUTPUT MULERG:INT; VERGL:BOOL; END_VAR 程序指令部分: LD PAR1 MUL PAR2 ST MULERG LD PAR1 EQ PAR2 ST VERGL
5 5 PAR1 PAR2
功能块的调用
在IL中调用: CAL INSTANZ(PAR1:=5,PAR2:=5) LD INSTANZ.VERGL ST QUAD
在FBD中调用:
INSTANZ FUB MULERG VERGL ERG QUAD
基于codesys控制器的脉冲轴控制方法

基于codesys控制器的脉冲轴控制方法什么是基于codesys控制器的脉冲轴控制方法?基于codesys控制器的脉冲轴控制方法,即使用codesys控制器来控制行走脉冲轴的位置和速度。
这种控制方法能够实现高精度、高可靠性的控制,广泛应用在机器人、电动工具、汽车零部件、医疗设备等行业中。
codesys控制器是一种只读/可编辑的控制器,其内置了IEC 61131-3标准的五种编程语言:Structured Text (ST)、Instruction List (IL)、Function Block Diagram (FBD)、Sequential Function Chart (SFC)和Ladder Diagram (LD)。
除此之外,它还支持各种常用的通信协议,如EtherNet/IP、Modbus TCP、Profibus等,可以将设备连接在同一个网络中,实现对真实世界的远程控制。
脉冲轴控制器通过检测脉冲轴的位置信号,以及通过设定的速度和位置将其发送到控制器,来实现对脉冲轴的控制。
脉冲轴控制器会根据输入的速度和位置信号,将相应的控制信号发送到脉冲轴,以实现对脉冲轴的控制。
在codesys控制器中,可以使用ST、IL、FBD、SFC和LD等编程语言来实现脉冲轴控制。
首先,在codesys控制器中创建一个新的项目,然后编写相应的代码来控制脉冲轴。
具体而言,需要定义脉冲轴的位置和速度,以及如何把控制信号发送到脉冲轴。
接着,将该项目编译成可执行文件,并将该文件下载到codesys控制器上。
最后,将codesys控制器与脉冲轴连接起来,即可实现对脉冲轴的控制。
codesys控制器可以实现高精度、高可靠性的脉冲轴控制,因此,如果要实现高精度、高可靠性的脉冲轴控制,建议采用基于codesys控制器的脉冲轴控制方法。
总而言之,基于codesys控制器的脉冲轴控制方法是一种能够实现高精度、高可靠性的控制的方法,通过使用codesys控制器,可以实现对行走脉冲轴的位置和速度的控制,广泛应用在机器人、电动工具、汽车零部件、医疗设备等行业中。
codesys指令系统

1.3,Counter : 计数器 :: CTU : 上升沿计数 : CTD : 下降沿计数 : CTUD :上升沿、下降沿计数 : 1.4,Timer : 计时器 :: TP : 触发计时器 : TON :高电平计时器 : TOF : 低电平计时器 : RTC : 运行时钟计时器 :
升沿保持 : F_TRIG :下 降沿保持 : 1.3,Counter : 计数器 :: CTU : 上升沿计数 : CTD : 下降沿计数 : CTUD :上升沿、下降沿计数 : 1.4,Timer : 计时器 :: TP : 触发计时器 : TON :高电平计时器 : TOF : 低电平计时器 : RTC : 运行时钟计时器 : 一、操作块 Operator 1、IEC Operators: 运算符 :: ADD :加法 : MUL :乘: SUB : 减: DIV : 除: MOD :求余 : 2、Bitstring Operators: 逻辑操作 :: AND :与: OR : 或: XOR :异或 :
OUT:=Ink; 5、Comparison Operators: 比较运算 :: GT : 大于 : LT : 小于 : LE : 小于等于 : GE : 大于等于 : EQ : 等于 : NE : 不等于 : 6、Address Operators: 地址 :: ADR 7、Calling Operators: 调用操作 :: CAL 8、Type Conversion Functions : 转型功能 :: BOOL_, : 布尔值转型 : :INT/STRING/TIME/,D/DATE/DT 等: ,_BOOL : 转型成布尔值 ::BYTE/INT/TIME/STRING 等: INT_,_SINT/REAL : 整数类型转换 : REAL_,/LREAL_, : 实数型 / 长实数型转型 ::INT 等 : TIME_,/TIME_OF_DAY 时: 间转型 ::STRING/DWORD/SINT等: DATE_,/DT_, : 日期转型 ::BOOL/INT/BYTE/STRING 等 : STRING_, : 字符串转型 ::BOOL/WORD/TIME等: TRUNC :取整 : 9、Numeric Functions : 数据计算功能 :: ABS : 取绝对值 : SQRT :开方 : LN : 取自然对数 :
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Codesys脉冲定位指令
简介
本文档将介绍Co de sy s中的脉冲定位指令。
脉冲定位指令是一种在工业自动化领域中常用的指令,用于实现对位置的精确控制。
本文将详细介绍C od es ys中常用的脉冲定位指令的使用方法和注意事项。
脉冲定位指令的概述
脉冲定位指令是一种用于控制运动装置的指令,其原理是通过控制装置的运动轴,根据给定的脉冲数,将装置准确移动到目标位置。
这种指令在许多工业自动化应用中广泛使用,如机器人控制、数控机床等。
脉冲定位指令通常由一系列的参数组成,包括起始位置、目标位置、速度、加速度等。
通过调整这些参数,可以实现对位置的精确控制。
Codes ys中的脉冲定位指令
在C od es ys中,提供了丰富的脉冲定位指令,可满足不同应用场景下的需求。
下面将介绍一些常用的脉冲定位指令及其使用方法。
M C_M o v e A b s o l u t e
M C_M ov eA bs ol ut e指令用于将运动轴移动到指定的绝对位置。
其语法如下:
M C_M ov eA bs ol ut e(a x is_n am e,po si tio n,v el oc it y,ac cel e ra ti o n)
-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`po si ti on`:目标位置,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可以实现对运动轴的直接控制,使其移动到指定的位置。
M C_M o v e R e l a t i v e
M C_M ov eR el at ive指令用于将运动轴相对于当前位置移动指定的距离。
其语法如下:
M C_M ov eR el at iv e(a x is_n am e,di st anc e,v el oc it y,ac cel e ra ti o n)
-`ax is_n am e`:指定要控制的运动轴的名称或编号。
-`di st an ce`:相对移动的距离,单位为脉冲数。
-`ve lo ci ty`:运动速度,单位为脉冲数/秒。
-`ac ce le ra ti on`:加速度,单位为脉冲数/秒²。
使用该指令可实现对运动轴的相对控制,使其相对于当前位置移动指
定距离。
M C_H a l t
M C_H al t指令用于立即停止运动轴的运动。
其语法如下:
M C_H al t(ax is_n ame)
-`ax is_n am e`:指定要停止的运动轴的名称或编号。
使用该指令可以快速停止运动轴的运动,确保运动装置在需要时能够
立即停止。
注意事项
在使用脉冲定位指令时,需要注意以下几个事项:
1.确保正确配置运动轴及其相关参数,包括步进电机、编码器等。
2.设置合适的速度和加速度,以免过快的运动造成机械设备的损坏。
3.定期进行运动轴的校准和调整,以确保位置的准确性。
4.注意处理异常情况,如运动轴超出限位、电机过载等,及时采取相
应的措施。
结论
本文档介绍了C od es ys中常用的脉冲定位指令的使用方法及注意事项。
通过合理的配置和调整参数,结合脉冲定位指令的使用,可以实现对运动装置位置的精确控制,满足工业自动化领域中的各种需求。
希望本文对您
的工作和学习有所帮助。
参考文献
-C od es ys官方文档
-《工业自动化控制系统设计与应用》。