基于MRAS的永磁同步电机矢量控制系统仿真研究
基于MRAS与SMO相结合的PSMS矢量控制
行了详细的分析。
2 PMSM 数学模型分析
通过坐标变换对永磁同步电机实现磁场矢量 控制,能获得较好的动态和稳态特性,并通过调节 PID 参数能获得更好的性能。 2.1 PMSM 在旋转坐标系下的模型[1] 在永磁同步电机中,取永磁体基波励磁轴线
(磁极轴线)为 d 轴(直轴) ,顺着转子旋转方向 超前 d 轴 90°电角度为 q 轴 (交轴) , dq 轴系以电 角度 ωγ 随同转子一道旋转, 它的空间坐标以 d 轴 与 A 轴间的电角度θr 来确定。于是永磁同步电机 在 dq 坐标系下的数学模型可以表示为: 电压方程:
(8)
⎧ u D = Rs * i D + p ψ D ⎨ ⎩ u Q = Rs * i Q + p ψ Q
则(8)式为 MRSA 模型中的可调模型。将(7)式和(8) 式相减且定义 e = i' s − i ' s 为广义误差可得: (4) 为 D,
uD , uQ 为 D,Q 轴定子电压; iD , iQ ψ D ,ψ Q 为 D,Q 轴链) Q 轴定子电流; 。
(5) 对(5)进行简化,令:
⎧ uq = Rs * i q + pψ q + ω r *ψ d ⎨ ⎩ud = R s * id + p ψ d − ω r *ψ q
磁链方程:
(1)
⎧ ψ q = L q * iq ⎨ ⎩ψ d = L d * i d + ψ
转矩方程:
f
(2)
ψf ⎧ i ' d = id + ⎪ Ls ⎪ ⎪ i ' q = iq ⎨ R s *ψ ⎪u' d = ud + Ls ⎪ ⎪ u ' q = u q ⎩
基于MATLAB的永磁同步电机矢量控制系统仿真

3 矢量控制与坐标变换模块
矢量控制 模 块 实 现 的 就 是 PMSM 的 矢 量 控 制 算 法 , 其 中 ,
空间矢量变换 ABC- DQ 和 DQ- ABC 的变换矩阵分别为:
! CABC- DQ=
2 3
"
##sinθ
#
#
#
#
##cosθ
#
#
#
1 #
#
#
# $
!
2
sin(
θ-
2 3
π)
cos( θ- 2 π) 3
运行方式由电机电磁转矩符号决定 (为正则是电动机状态, 为
负则是发电机状态)。为了简化模型, 可以假定转子永磁磁极在
定子上产生的感应磁通是正弦分布的, 并且由于通常永磁同
步电机的气隙较大, 可以近似地忽略定电机铁心的磁饱和。
因此永磁同步电机在 d- q 轴的电压方程为:
d dt
id
=
1 Ld
ud
-
R1 Ld
π)
cos(θ+ 2 3π) Nhomakorabea$
1 !2
& & & & ’
根 据 上 面 两 式 在 MATLAB 环 境 下 可 分 别 得 到 dq/abc 和
abc/dq 坐标变换的子模块, 用以实现 PMSM 的矢量控制算法,
将电流转换为电压。
4 电流滞环型 PWM模块
电 流 滞 环 PWM 模 块 实 现 的 是 PMSM 的 滞 环 电 流 控 制 方
The S imula tion Ba s e d on Ma tla b for Ve ctor Control of P e rma ne nt Ma gne t S ynchronous Motor
基于MRAS技术在永磁同步电机控制中的应用
中 图 - a e c no o y I r a ntM a ne n hr no o or Co r lSy t m b s d Te h l g n Pe m ne g tSy c o usM t nt o se
t dut e t f h d s bemo e o a t st eet ae . jsal mo e w i ci e h i ajsm n o eaj t l me t u a dl f a me r ob si td Adutbe dl hc ahe dte pr e m h v
模 型 的 目的 。 并根 据 超 稳 定 性 理 论 来 保 证 系统 和 速 度 的 渐 进 收 敛 性 。 在 MA L B Sm l k环 境 下 实 现 T A / i ui n
基 于 MR S 术 永磁 同步 电机 直接 转 矩控 制 系统 的仿 真 。仿 真 结 果表 明 , A 技 能够 准 确估 计 转 子 的速 度 和
・
控 制与 检 测 ・
组合机床与自动化加工技术
文 章 编 号 :0 1 2 6 ( 0 0 0 0 6 0 10 — 2 5 2 1 ) 4— 0 8— 4
基于 M A R S技术 在 永 磁 同步 电机 控 制 中的 应 用
叶 汉 民 , 晓 霞 时
( 西桂 林理 工大 学 机械 与控 制工 程 学院 , 西 桂 林 5 10 ) 广 广 404
ig o tM o edwa e t dutb a mees T ecr n dl f oo ulu d s be d n i , o r p e sst oajsalp r tr, h ur t p n t s e a e mo e o tr i p aj t lmo - m b t u a
永磁同步电机矢量控制系统仿真研究

永磁同步电机矢量控制系统仿真研究摘要:随着电力电子、电机制造技术以及新型材料的飞速发展,交流调速理论以及新型控制理论研究的不断深入,永磁交流调速系统在机电一体化、机器人、柔性制造系统等高科技领域中占据了日益重要的地位。
永磁同步电动机具有能量转换效率高、体积小,运行可靠性高、调速范围广,动、静特性好等优点,这使得永磁同步电动机技术得到了迅速发展。
PWM控制技术从最早追求电压波形正弦,到电流波形正弦,再到磁通正弦,得到了不断创新和完善。
本文是在此基础上,参照了众多学者的研究,对永磁同步电机进行了矢量控制的研究,并通过建立仿真模型,对矢量控制下永磁同步电机进行仿真,并对结果进行分析。
关键词:永磁交流调速,PWM控制技术,永磁同步电动机1 PMSM数学模型介绍精确的电机数学模型是电机控制理论得以研究与实现的基础,因此首先给出三相永磁同步电动机数学模型。
推导前作如下假设:1)定子三相绕组对称,Y型连接;2)反电动势正弦;3)铁磁部分磁路线性,即不计饱和、剩磁、涡流、磁滞损耗等影响;4)转子无阻尼绕组,永磁体没有阻尼作用;PMSM在a-b-c坐标系统中电压方程用矩阵形式表示为:(1)其中定子电枢相电阻;、、定子绕组端电压瞬时值;、、定子绕组相电流瞬时值;、、磁链瞬时值;微分算子,。
PMSM定子绕组电感系数是转子位置角的函数,其电压方程、磁链方程都是含有时变系数的微分方程组,在分析PMSM工作过程时用解析法求解时变系数方程组是比较困难的,需要采取数值法求解,不便于工业控制应用。
因此采用park变换矩阵,将PMSM数学模型变换到固定在其转子上的两相旋转坐标系d-q坐标系中,将上述含时变系数的微分方程组变换为易于求解的常系数微分方程组,这对于分析PMSM动态过程和稳态过程都是十分有意义的。
从而得到建立在dq旋转坐标中和三相静止坐标中电机模型之间具有如下关系:(2)(3)PMSM中定子绕组一般为无中线的Y型连接,固。
永磁同步电机矢量控制仿真实验总结
永磁同步电机矢量控制实验总结矢量控制是交流电机的一种高性能控制技术,最早由德国学者Blaschke 提出。
其基本思想是根据坐标变换理论将交流电机两个在时间相位上正交的交流分量转换为空间上正交的两个直流分量,从而把交流电机定子电流分解成励磁分量和转矩分量两个独立的直流控制量,分别实现对电机磁通和转矩的控制,然后再通过坐标变换将两个独立的直流控制量还原为交流时变量来控制交流电机,大大提高了调速的动态性能。
随着新型电机控制理论和稀土永磁材料的快速发展,永磁同步电机(PMSM )成为近年来发展较快的一种电机。
它具有气隙磁密度高、转矩脉动小、转矩/ 惯量比大的优点,与传统的异步电机相比,节能效果明显、效率高、结构轻型化、维护容易、运行稳定、可靠性高、输出转矩大,得到了越来越广泛的应用和重视,是目前交流伺服系统中的主流电机。
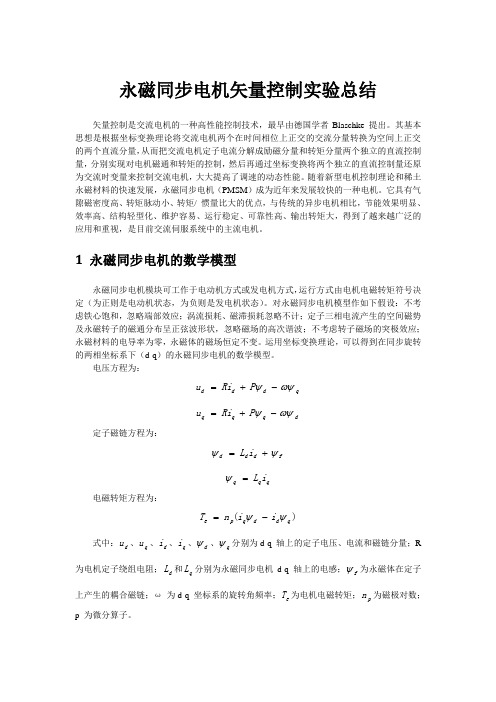
1 永磁同步电机的数学模型永磁同步电机模块可工作于电动机方式或发电机方式,运行方式由电机电磁转矩符号决定(为正则是电动机状态,为负则是发电机状态)。
对永磁同步电机模型作如下假设:不考虑铁心饱和,忽略端部效应;涡流损耗、磁滞损耗忽略不计;定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状,忽略磁场的高次谐波;不考虑转子磁场的突极效应;永磁材料的电导率为零,永磁体的磁场恒定不变。
运用坐标变换理论,可以得到在同步旋转的两相坐标系下(d-q )的永磁同步电机的数学模型。
电压方程为:q d d d P Ri u ωψψ-+=d q q q P Ri u ωψψ-+=定子磁链方程为:f d d d i L ψψ+=q q q i L =ψ电磁转矩方程为:)(q d d q p e i i n T ψψ-=式中:d u 、q u 、d i 、q i 、d ψ、q ψ分别为d-q 轴上的定子电压、电流和磁链分量;R 为电机定子绕组电阻;d L 和q L 分别为永磁同步电机d-q 轴上的电感;f ψ为永磁体在定子上产生的耦合磁链;ω 为d-q 坐标系的旋转角频率;e T 为电机电磁转矩;p n 为磁极对数;p 为微分算子。
永磁直线同步电机矢量控制模型及仿真的研究

式中 L d , L q — — — 直轴同步电感系数和交轴同 步电感系数 。 在理想情况下 , 即直线电机三相绕组对称 , 气隙 磁场均匀分布 , 感应反电势呈正弦波时 , 可以认为 d q 轴电感相同 ( L d = L q ) , 由式 ( 10 ) 可以看出 , 经过 坐标变换后 , 直轴与交轴的磁链和电流实现了解耦 。 电机的电磁推力方程 π 3 Np (ψdi q - ψ ( 11) Fe = qi d ) 2τ 式中 Fe — — — 电磁力 ; N p — — — 极对数 。 将式 ( 10) 带入式 ( 11) 有 π 3 Np ( 12) Fe = [ψ f i q + ( L d - L q ) i di d ] 2τ 电机的机械运动方程 ( 13) Fe = FL + B vv + Mpv 式中
M bf = Mf cos (θ-
ψ u0 = Ri 0 + p 0 式中
R— — — 每相绕组电阻值 ; ω— — — 永磁直线电机平移速度折合成的旋转 π ) v; 电机角速度 ,rad/ s ,ω = ( /τ v— — — 平移速度 , m/ s ;
式中 L m — — — 定子自感 ; Lσ — — — 定子漏感 ; Mf — — — 永磁体等效互感系数 ; θ— — — d 轴与 a 轴的夹角 。 则式 ( 2) 写成矩阵形式为 ψa L - 0. 5L ψb = ψ c
式 ( 9) 、 式 ( 10) 、 式 ( 12) 、 式 ( 13) 即构成永磁同步 直线电机在 dq 坐标系下的数学模型 。 2 SIMULINK 下 PMLSM 的仿真模型 根据上面建立的永磁直线同步电动机的数学模 型 ,利用 Simulink 仿真环境建立了永磁直线同步电 机的仿真模型 , 由式 ( 9 ) 和式 ( 10 ) 可以建立 PMLSM 的电流方程 ω Lq ud R id Ld Ld id Ld = + ω ω iq Ld iq uq - ψ f R Lq Lq Lq
基于MRAS的永磁同步电机无传感器控制系统研究
基于MRAS的永磁同步电机无传感器控制系统研究基于MRAS的永磁同步电机无传感器控制系统研究【摘要】永磁同步电机的有效控制需要可靠的转子位置信息。
为了解决使用机械传感器的缺点,估算转子位置的无传感器技术已经成为近年来的研究热点。
本文研究了基于矢量控制的无传感器控制技术原理和永磁同步电机的数学模型。
对无传感器控制方法估计转子速度和位置电机参考自适应系统进行了研究。
以永磁同步电机为研究对象,使用MATLAB/SIMULINK进行建模与仿真对系统进行研究。
【关键词】MRAS 永磁同步电机MATLAB仿真1 引言近几年,国内外的研究将永磁同步电机无速度传感器控制方法分为三种。
首先是基于电机理想模型的开环计算方法;其次是基于各种观测器模型的闭环算法;最后是以高频注入法为典型代表的基于电机非理想特性的算法。
这些方法各有优缺点,适用的场合不同。
目前理论研究热点主要集中在第二种。
状态观测器法的实质是状态重构,这种方法具有稳定性好、鲁棒性强、适用面广的特点。
本文采用了基于参考自适应理论构造的永磁同步电动机无速度观测器根底上,运用滑模变结构控制理论设计了系统总体控制方案,论证出模型参考自适应滑模控制具有快速的响应和较强的鲁棒性。
对永磁同步电动机无传感器控制的主要思想是提取可测量的物理量,然后再利用这些物理量通过适当的方式来估算转子的速度和位置,以实现电动机的闭环控制。
2 系统模型建立为了建立永磁同步电动机的数学模型,首先进行一下假设:三相绕组完全对称;忽略了齿轮摩擦;不包括核心损耗。
根据上面的假设,建立了永磁同步电动机的数学模型的d、q轴旋转坐标系方程如下:从方程,可以知道控制永磁同步电动机的电磁转矩的控制从根本上取决于定制电流在d、q 轴的分量。
磁场定向控制采用基于id=0,不仅由于其易执行性,与此同时,这种控制方法可以有效地抑制由电枢反响引起的退磁,并减少铜耗。
对于永磁同步电动机控制,定子电流是独立于转子磁通的,并且系统简单具有良好的转矩不变性能。
基于Matlab的永磁同步电机矢量控制系统仿真研究
中图分类号:T M351 T M341 文献标识码:A 文章编号:100126848(2007)022*******基于Matlab 的永磁同步电机矢量控制系统仿真研究龚云飞,富历新(哈尔滨工业大学机器人研究所,哈尔滨 150001)摘 要:在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(S VP WM )技术使得交流电机能够获得和直流电机相媲美的性能。
为了更好地验证基于DSP 的交流调速矢量控制系统实际设计过程中各部分输出特性的正确性并为其设计提供必要的设计参数,利用Matlab /Si m ulink 工具箱搭建了系统的仿真模型。
仿真结果符合电机实际运行特性,为实际系统的设计提供了理论依据。
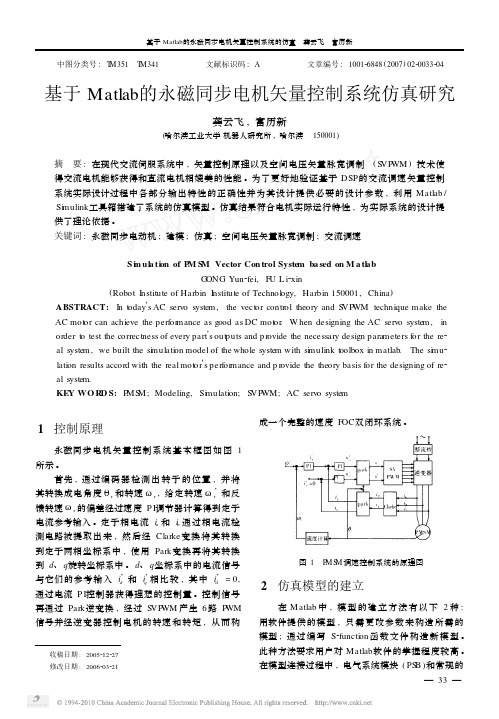
关键词:永磁同步电动机;建模;仿真;空间电压矢量脉宽调制;交流调速S i m ul a ti on of P M S M Vector Con trol Syste m ba sed on M a tl abG ONG Yun 2fei,F U L i 2xin(Robot I nstitute of Harbin I nstitute of Technol ogy,Harbin 150001,China )ABSTRACT:I n t oday πs AC servo syste m ,the vect or contr ol theory and S VP WM technique make the AC mot or can achieve the perfor mance as good as DC mot or .W hen designing the AC servo syste m ,in order t o test the correctness of every part πs out puts and p r ovide the necessary design para meters f or the re 2al syste m ,we built the si m ulati on model of the whole syste m with si m ulink t oolbox in matlab .The si m u 2lati on results accord with the real mot or πs perf or mance and p r ovide the theory basis for the designing of re 2al syste m.KEY WO R D S:P MS M;Modeling,Si m ulati on;S VP WM;AC servo syste m收稿日期:2005212227修改日期:20062032211 控制原理永磁同步电机矢量控制系统基本框图如图1所示。
基于MRAS与Fuzzy-PID算法的永磁同步电机变频调速系统的研究
基于MRAS与Fuzzy-PID算法的永磁同步电机变频调速系统的研究朱昌富【摘要】研究的MRAS观测器将永磁同步电机实际运行的d-q轴电流值作为参考模型,以d-q轴构造的状态方程作为可调模型,实现了永磁同步电机的转速与转角的辨识.为了改善永磁同步电机变频调速系统的控制性能,设计了一套Fuzzy-PID控制算法替代传统的PID转速调节器.仿真试验的结果表明,基于MRAS永磁同步电机的转速与转角的辨识效果比较理想.与传统PID控制相比,Fuzzy-PID控制的永磁同步电动机变频调速系统具有响应速度更快、精度更高、抗干扰能力更强等良好品质.【期刊名称】《长江大学学报(自然版)理工卷》【年(卷),期】2012(009)006【总页数】5页(P130-134)【关键词】永磁同步电机;MRAS;Fuzzy-PID算法;变频调速【作者】朱昌富【作者单位】宁德师范学院物理与电气工程系,福建宁德352100【正文语种】中文【中图分类】TM341在传统的永磁同步电机(PMSM)矢量控制调速系统中,速度和电流等调节器更多的集中于传统PI或PID控制,反馈信号通常采用旋转变压器或光电编码器来检测转子的位置和速度得到。
显然,额外的传感器、连接器、电缆等增加了系统的成本,而且降低了系统的可靠性[1],另外PMSM调速系统是一个时变的非线性系统,传统PID控制易受外界的干扰导致失效。
因此研究无速度传感器的永磁同步电机智能变频调速系统是未来科研工作者的努力方向。
关于速度辨识方法的成果较多,例如:文献[2-3]采用定子磁链估计法,磁链由反电势积分求得,但是由于积分器的漂移问题,得到的磁链值会有积分误差;文献[4]采用卡尔曼滤波器估计法,可以从随机噪声信号中得到最优观测,但采用这一算法计算量较大;文献[5-6]采用滑模观测器估算法,可以选择合适的反馈值来估算转子位置,但受电机参数的影响较大。
以上研究最大的特点是调节器都使用PID算法,但未能更好的发挥出PMSM 调速系统的控制性能。
基于Matlab的永磁同步电机矢量控制系统仿真研究

基于Matlab的永磁同步电机矢量控制系统仿真研究一、本文概述随着电机控制技术的快速发展,永磁同步电机(PMSM)因其高效率、高功率密度和优良的调速性能,在众多工业领域得到了广泛应用。
为了充分发挥永磁同步电机的性能优势,需要对其进行精确的控制。
矢量控制作为一种先进的电机控制策略,能够实现对电机转矩和磁链的独立控制,从而提高电机的动态和稳态性能。
对基于Matlab的永磁同步电机矢量控制系统进行仿真研究,对于深入理解电机控制原理、优化控制系统设计以及推动电机控制技术的发展具有重要意义。
本文旨在通过Matlab仿真平台,构建永磁同步电机的矢量控制系统模型,并对其进行仿真分析。
文章将介绍永磁同步电机的基本结构和工作原理,为后续的控制系统设计奠定基础。
接着,将详细阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,文章将构建基于Matlab的永磁同步电机矢量控制系统仿真模型,并对其进行仿真实验。
通过对仿真结果的分析,文章将评估矢量控制策略在永磁同步电机控制中的应用效果,并探讨可能的优化措施。
二、永磁同步电机的基本原理和特性永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种利用永久磁铁作为转子励磁源的同步电机。
其工作原理主要基于电磁感应定律和电磁力定律,结合现代电力电子技术和先进的控制理论,实现了对电机的高性能控制。
永磁同步电机的核心构造包括定子绕组和永磁体转子两大部分。
定子绕组与交流电源相连,通入三相对称电流后会产生旋转磁场,类似于异步电机中的定子磁场。
不同于异步电机的是,PMSM的转子上镶嵌有高性能稀土永磁材料,这些永磁体在电机运行时不需外部电源励磁,即可产生恒定的磁场。
当定子旋转磁场与转子永磁磁场相互作用时,便会在电机内部形成一个合成磁场,从而驱动转子跟随定子磁场同步旋转。
高效节能:由于取消了传统同步电机所需的励磁绕组和励磁电源,永磁电机减少了励磁损耗,效率通常能达到90以上,尤其在宽负载范围内保持较高的效率水平。
两种基于Matlab对永磁同步电动机矢量控制系统的仿真方法
D 设计分析 e s i g n a n d a n a l y s i s 微特电机 2005年第7期 两种基于Matlab 对永磁同步电动机矢量控制系统的仿真方法收稿日期:2005-01-04两种基于M a tl ab 对永磁同步电动机矢量控制系统的仿真方法刘明丹1,刘 念2(1.四川农业大学,四川雅安625014;2.四川大学,四川成都610065)Two K i n ds of S i m ul a ti on M ethods for the Vector Con trol Syste m of Per manen tM agnet SynchronousM otor Ba sed on M a tl abL I U M ing -dan 1,L I U N ian2(1.Sichuan Agricultural University,Ya ′an 625014,China;2.Sichuan University,Chengdu 610065,China ) 摘 要:重点分析了应用M atlab /Si m ulink 对永磁同步电动机动态过程分析时建立电机仿真模型时的两种方法,一种是用电机状态方程系数阵[A,B ,C,D ]及State -Space 模块并辅以一些运算模块搭建电机模块;另一种是以S -函数方式实现。
并分别给出了两种建模方式的主要步骤。
关键词:Matlab 仿真;永磁同步电动机;矢量控制;S -函数中图分类号:T M 341 文献标识码:A 文章编号:1004-7018(2005)07-0026-03Abstract:T wo kinds of research and devel opment work on the vect or contr ol of per manent magnet synchr onous mot or with the ai m of si m ulati on are analyzed .The first is using the mot or’s constant [A,B ,C,D ]of state f or mula,and state -s pace module with the ai m of calculati on .The second is realized by using S -functi on .And the main method thr ough the modeling is given separately .Keywords:M atlab si m ulati on;per manent magnet synchr o 2nous mot or;vect or contr ol;S -functi on随着计算机软硬件技术的迅猛发展,市场上出现了多种计算机仿真软件。
基于Matlab永磁同步电机矢量控制的仿真分析
行设置,仿真参数的选取算法为 ode23t,可 变 步 长 ,相 对 误 差 为 0.001s; 本例仿真中用到的永磁同步电机参数: 直流母线电压 Udc=300V、额定转速 nN=2000r / min、额定转矩 TN=8Nm,极 对 数 pm=4、 定 子 绕 组 电 阻 r =0.9585Ω、dq 轴 的 转 子 电 感 Ld=Lq= 5.25mH、转子的磁场磁通量 φf=0.1827Wb,转子的转动惯量 J= 0.6329×10-3kgm2,系 统 在 t=0 时 空 载 启 动 ,并 且 预 设 的 转 速 为 1000r / min,在 t=0.05s 的时候加上 2Nm 阶跃干扰,可得到转速 响应曲线、转矩响应曲线以及 ia、ib、ic 三相电流曲线。
讨论可知控制好 id 和 iq 便可以控制电机的转矩, 一定的转速和
*
*
转矩对应于一定的 id 和 iq 。
图 1 PMSM 矢量控制系统的基本框图 永磁同步电机可采用的电流矢量控制方法包括:id=0 控制、 最大转矩 / 电流控制、弱磁控制以及最大输出功率控制。 本文采 用的 id=0 控制方案,当 id=0 时,转矩 T 和 iq 呈线性关系,只要对 iq 进行控制就能达到控制转矩的目的。 2 永磁同步电机矢量控制模型的仿真模块 本系统采用 Matlab7.0 / Simulink 中的模块搭建矢量控制系
38 统实验仿真平台。
图 2 PMSM 矢量控制闭环控制系统模型 2.1 转子的初相角测定
在仿真模型建立的过程中,如何得到 PMSM 转 子 的 初 相 角 对仿真中获得正确的波形非常关键, 通过仿真可以得到 PMSM 转子的初相角为 π / 2。
基于MRAS的永磁同步电机矢量控制系统

a c c u r a t e l y , a n d i t h a s b e t t e r d y n a mi c p e r f o r ma n c e a n d s ro t n g r o b u s t n e s s .
Ke y wo r d s:mo d e l r e f e r e n c e a da p t i v e s y s t e m;v e c t o r c o n t r o l ;s p e e d s e n s o r l e s s
摘 要 :提 出 了将模 型参考 自适应技 术应 用于永磁 同步 电机 无速度传 感器控制 系统 中。根据 永磁 同步 电 机 的数 学模 型 ,设计 了一个基 于模 型参 考 自适应 的状 态观 测 器估 算 电机 转予 速度 ,并 对 系统 的稳 定性进 行
分析 ,在 S i mu l i n k软件 中建立相应 的仿 真模型 。仿真结 果表 明 :该控 制 系统 可以较 准确地追踪转速 ,具有 良
Abs t r a c t : Th e mo d e l r e f e r e n c e a da p t i v e t e c h n i q u e i s a p p l i e d i n t h e s e ns o r l e s s c o n t r o l s y s t e m o f P M SM . On t h e b a s i s o f PM S M ma t h e ma t i c a l mo d e l , a M RA S o bs e r v e r i s de s i g n e d t o e s t i ma t e t h e mo t o r r o t o r s p e e d , t h e s t a b i l i t y o f s y s t e m i s a n a l y z e d a n d t h e s i mu l a t i o n mo d e l i s b u i l t by S i mu l i n k. Th e s i mu l a t i o n r e s u l t s s h o w ha t t he t s ys t e m t r a c k s he t mo t o r s p e e d
基于MRAS的永磁同步电机无传感器矢量控制系统
设计与分析♦Sheji yu Fenxi基于MRAS的永磁同步电机无传感器矢量控制系统赵俊杰刘旭东肖朋(营口职业技术学院机电工程学院,辽宁营口115000)摘要:为了构建高性能的电机运动控制系统,电机往往釆用闭环控制方式,这就需要通过安装在电机转轴上的传感器来釆集和检测转子的位置和转速等信号。
然而传感器的安装会使系统的成本大幅提高,不利于系统的小型化,且极易出系统性。
为了这釆用型自适应算法(MRAS)来别电机的转子位置转速等信电机传感器控制系统-建了且化的数学型,利用性性。
在Matlab/Simulink建型了系统性高的性能。
关键词:电机(PMSM)型自适应(MRAS)控制;Simulink仿0引言永磁同步电机(PMSM)高大、小构等电机,且在机器工业控机等应用。
然而,在传统的控制方法通利用传感器-电器)来采集转子的位置速等信通过信息来构成环控制系统,从而使得电机传动系统好的控制性能。
但是,传感器的安装在际应用中存在着一系列会使系统成本提高、占用空间、不利于系统小型化、不适用于一些集成度要求高特殊的环境等。
此,基于电机绕组的电信号转子的位置和速估计的电机无传感器控制系统目前得到了的关注且发展非迅速。
基于上述背景,本文传统的电机控制系统进行优化从PMSM的学型出发,推导构建出MRAS的速与位置辨识算法,再基于该优化算法PMSM的无传感高性能控制。
1永磁同步电机的MRAS算法1.1MRAS算法基本原理MRAS算法又称为型自适应,它的主要原理:通过选两物意义相的输出型来构造出误差:,这两型称为型,另称为调型,再根据这误差构建出适当的自适应来调节调型的参从而使调型的输出能够时追踪型。
且一旦际的输出出偏离后控制系统通过自适应能够快速调整时修正。
因此,只要保证该系统误差的状态变量收敛到0,即可估算出PMSM的-1.2系统的数学模型构建数学模型是针某种事物系统的特征,采用数学语言或学表达式刻画出某系统或研究的关系构,在研究际关要的作用。
基于MRAS的永磁同步电机无传感器矢量控制研究
感 值 的检测 不 准 确 也会 影 响转 子 位 置 的 准 确度 。
文 献 [4—7]提 出 了 高频 信 号 注入 法 ,虽 对 电机 参
数 不敏 感 ,估 算 方法 与反 电动势 无关 ,没有 低 速估
算的限制 ,对于无传感器低 速运行有很好的控制
效果 ,但 只对 凸极 电机辨 识 效 果 好 而 对 隐 极 电机
为 了实 现 PMSM 高精 度 、高 动态 性 能 的速度 和位 置控 制 ,一 般需要 安装 机械式 传感器 ,但 机械 式传 感器 的使 用 ,增加 了电机 的成 本和 尺寸 ,增 大 了转子 转动惯 量 ,同时 ,传感 器易 受环境 因素 的影 响而使 系统 稳定 性 变 差 。 因此 研究 无 位 置/速 度 传感 器控 制方 法有利 于 电机 向更 高速更 稳定 的方 向发展 。 目前 ,学 者们 已经 提 出 了很 多 PMSM 无 传 感器 控制方 法 。文献 [1]提 出了磁 链 观测 估计 法 ,通 过 电机 两 相 静 止 数 学模 型 ,能 得 到 磁 链 公 式 ,但该 方法估 算 的转子 位置 和转速准 确度 不 高 ,
WANG Jie, XIE Yuan, XIE Tao, XIAO Lijian (College of Electr ical Engineer ing,Shanghai Dianji University,Shanghai 20 1 306,China)
Abstract:A method of referenee adaptive control theory(MRAS)to estimate the speed and position of the motor was presented.PMSM as the referenee model,the stator current equation with variable speed as the adjustable mode1.Popov stability theor y as a basis to design adaptive rate,when the adjustable model was equivalent to the
基于MATLAB永磁同步电动机矢量控制系统的仿真研究
本科生毕业设计(论文)学院(系):专业:学生:指导教师:完成日期2011 年 5 月本科生毕业设计(论文)基于MATLAB永磁同步电动机矢量控制系统的仿真研究The simulation research of permanent magnet synchronous motor vector control system based on Matlab总计:29 页表格: 1 个插图:28 幅本科毕业设计(论文)基于MATLAB永磁同步电动机矢量控制系统的仿真研究The simulation research of permanent magnet synchronous motor vector control system based on Matlab学院(系):专业:学生姓名:学号:指导教师(职称):评阅教师:完成日期:基于MATLAB永磁同步电动机矢量控制系统的仿真研究电气工程及其自动化[摘要] 永磁同步电动机作为一种新型电动机,具有功率密度高、转子转动惯量小、运行效率高等优点,获得广阔的应用和发展空间,在各行各业以及日常生活中的应用越来越广泛。
本文在综述了永磁同步电动机及其控制技术发展情况的基础上,推导了永磁同步电动机的数学模型和等效电路,并详细论述了其矢量控制原理,分析了i d=0控制、最大转矩/电流控制、弱磁控制等控制策略。
论文最后利用了Matlab/simulink 工具对id=0的永磁同步电动机矢量控制系统进行了仿真研究,仿真结果证明了所提出的控制方法的正确性,为实际电机控制系统的设计提供了理论依据。
[关键词] 永磁同步电动机;仿真建模;Matlab;矢量控制The simulation research of permanent magnet synchronous motor vector control system based on MatlabElectrical Engineering and Automation SpecialtyAbstract:As a new style motor, permanent magnet synchronous motors are receiving increased attention for drive applications because of their high torque to ratio, Permanent magnet synchronous motors(PMSM) are becoming attractive in many application of industry and daily life.Based on summarizing the PMSM and its control technological development situation ,this paper infered the PMSM mathematical model and the equivalent circuit, and detailed its principle of vector control, and analyzed the i d=0 control, biggest torque/current control, flux-weaked control and so on. At the end of the paper, the simulation research of i d=0 PMSM vector control system is carried out with Matlab /simulink tool ,the simulation results prove the control method accuracy, and provides the theory basis for the actual motor control system design.Key words:Permanent magnet synchronous motor(PMSM);modeling and simulation;matlab;vector controlI目录1 引言 (1)1.1永磁同步电动机的发展概况和发展前景 (1)1.1.1 永磁同步电动机的发展概况 (1)1.1.2 永磁同步电动机的发展前景 (2)1.2永磁同步电动机控制技术的发展 (2)1.2.1 永磁同步电动机控制技术的概述 (2)1.2.2 永磁同步电动机矢量控制技术的发展 (3)1.3本文的主要研究内容 (3)2 永磁同步电动机的工作原理和数学模型 (4)2.1永磁同步电动机的工作原理 (4)2.1.1永磁同步电动机稳态方程 (4)2.1.2 永磁同步电动机的双反应理论 (6)2.1.3永磁同步电动机的等效电路 (6)2.1.4 永磁同步电动机的损耗和效率 (7)2.2永磁同步电动机的数学模型 (8)3 永磁同步电动机的矢量控制原理 (12)3.1永磁同步电动机的矢量控制原理 (12)3.2永磁同步电动机矢量控制运行时的基本电磁关系 (12)3.3永磁同步电动机的矢量控制策略 (14)4 永磁同步电动机矢量控制系统ID=0控制的SIMULINK仿真 (14)4.1永磁同步电动机矢量控制系统的建模 (14)4.2永磁同步电动机矢量控制系统的SIMULINK仿真 (19)4.2.1 空载启动仿真 (20)4.2.2转速突变仿真 (21)4.2.3 负载突变仿真 (23)5 总结 (25)结束语 (26)参考文献 (27)附录 (28)致谢 (29)II1 引言电机是以磁场为媒介进行电能与机械能相互转换的电力机械。
永磁同步电机矢量控制的MATLAB仿真研究报告
永磁同步电机矢量控制的MATLAB仿真研究永磁同步电机/矢量控制/仿真/模型1 引言永磁同步电机〔PMSM〕相对于其它形式的电机有着自身显著的特点:在基速以下不需要励磁电流,在稳定运行的时候没有转子电阻损耗,可以显著的提高功率因数;不设有电刷和滑环,构造简单,使用方便,可靠性高;并且相对于同功率因数下的其它电机来说,体积要小的多,近年来,随着电力电子技术,微电子技术,稀土永磁材料的迅速开展,及永磁电机研究开发经历的成熟,使得永磁同步电机广泛应用于国防,工农业和日常生活中[1]。
由于永磁同步电机是一个多变量,非线性,高耦合的系统,其输出转矩与定子电流不成比例,而是复杂的函数关系,因此要得到好的控制性能,必须对其进展磁场解耦,而这些特点恰好适用于矢量变化控制技术,而且在永磁同步电机的矢量控制过程中没有在感应电机中的转差频率电流而且受转子参数的影响较小,所以永磁同步电机上更容易实现矢量控制[2],因此,对永磁同步电机的矢量控制模型的研究成为研究者广泛关注的课题。
本文在分析永磁同步电机的数学模型的根底上,借助MATLAB/SIMULINK的强大仿真建模能力,建立了PMSM 的矢量控制系统的仿真模型,同时还详细的介绍了矢量控制系统中的各控制单元模型的建立,并对其控制结果进展分析。
2 永磁同步电机的数学模型图1 PMSM的部电磁构造一台PMSM的部电磁构造如图1所示,其中各相绕组的轴线方向也作为各相绕组磁链的正方向,电流的正方向也标在图中,可以看出定子各相的正值电流产生各相的负值磁链,而定子绕组的电压正方向为电动机惯例。
在建立数学模型之前做如下的假设:忽略铁心饱和;不计涡流和磁滞损耗;转子上没有阻尼绕组;永磁材料的电导率为0;相绕组中感应电动势波形是正弦波。
根据以上的假设和一系列的推导可得到PMSM 在d-q坐标系下的数学模型如下。
定子电压方程:(1)(2)定子磁连方程:(3)(4)将方程〔3〕和〔4〕代入到方程〔1〕和〔2〕,得到如下方程:(5)(6)将〔5〕-〔6〕合并得到如下方程:(7)将〔7〕方程变化成适合在Matlab/simulink环境下能搭建模型的方程,即。
基于MRAS内置式永磁同步电机无位置传感器控制研究
基于MRAS内置式永磁同步电机无位置传感器控制研究张伯泽;阮毅【摘要】对一种基于模型参考自适应系统( MRAS)的内置式永磁同步电机( IPMSM)无位置传感器矢量控制策略进行了研究。
该控制策略仅需很少的参数就可以估算出电机转速。
该控制策略中,IPMSM本身作为参考模型,将含有待估参数的IPMSM数学模型作为可调模型,这两个模型的输出之差驱动自适应律,从而获得估算转速。
在MRAS中引入比例积分环节,提高了系统的动态性能。
该控制策略实现了IPMSM在极低速0.5 Hz下的运行。
仿真结果表明:提出的控制策略有良好的动态响应和稳态响应,估算转速有较高的精度,系统有较强的鲁棒性,IPMSM在极低速下运行良好。
%One novel control strategy for IPMSM sensorless control based on MRAS was presented. This control strategy can estimate the rotor speed with a few parameters. IPMSM itself was selected as reference model, and the mathematical model of IPMSM which includes estimated parameters was regarded as adaptive model. The output error of these two models was used to drive the adaption mechanism and the estimated speed was obtained. Also the PI control in MRAS to increase the dynamic performance was introduced. Using this control strategy, IPMSM could work under very low speed condition of 0. 5 Hz. The simulation results verify the proposed control strategy was effective, it had excellent dynamic and static responses, the estimated speed had good precision and the system was robust and could still work well in the very low speed range.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)004【总页数】4页(P13-16)【关键词】内置式永磁同步电机(IPMSM);模型参考自适应;无位置传感器控制【作者】张伯泽;阮毅【作者单位】上海大学,上海 200072;上海大学,上海 200072【正文语种】中文【中图分类】TM351内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)因具有体积小、质量轻、响应快、损耗小、功率密度大和效率高等优点而获得了广泛应用。
基于矢量控制的永磁同步电机控制系统的仿真
基于矢量控制的永磁同步电机控制系统的仿真刘慧敏;葛永强;常亚辉;张晓磊;庞继文【摘要】On the basis of the mathematical model of Permanent Magnet Synchronous Motor (PMSM),speed control system using the vector control theory is introduced in this paper. In Matlab6.5/Simulink,the isolated blocks, such as PMSM block, coordinate transformation block,three phase current source inverter controller block, PI modulation block etc are modeled. Then a double closed loop control system which consists of the inner current-loop and the outer speed-loop is constructed. The result of simulation testified the Vector Control theory is correct and realizable.%介绍了三相永磁同步电机常用的坐标系以及不同坐标系下的数学模型,并通过采用矢量控制方法实现电机的转速控制.在MATLAB6.5中的Simulink环境下,通过建立PMSM本体、坐标变换、电源逆变器、PI调节器等模块,搭建了永磁同步电机控制系统的速度和电流双闭环仿真模型.仿真结果验证了永磁同步电机矢量控制的正确性与可行性,为永磁同步电机控制系统设计提供了理论基础.【期刊名称】《火力与指挥控制》【年(卷),期】2015(040)011【总页数】4页(P135-138)【关键词】永磁同步电机;矢量控制;MATLAB仿真;PI控制【作者】刘慧敏;葛永强;常亚辉;张晓磊;庞继文【作者单位】北京航天控制仪器研究所,北京 100854;北京机械设备研究所,北京100039;北京航天控制仪器研究所,北京 100854;北方自动控制技术研究所,太原030006;北方自动控制技术研究所,太原 030006【正文语种】中文【中图分类】TP31三相永磁同步电机(Permanent Magnet SynchronousMotor,简称PMSM)是从绕线式转子同步伺服电机发展而来的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
V0 1 . 2 3 No . 1 0
电子设计 工 程
El e c t r o n i c D e s i g n En g i n e e r i n g
2 0 1 5年 5月
Ma y .2 01 5
基于 MR A S的永磁 同步电 机 矢量控பைடு நூலகம் 系统仿真研 究
4 ) 在 恶 劣 的 环 境 下 无 法 工 作 ,且 码 盘 工 作 精 度 易 受 环
鱼 L d t=一孙
。 + L
( 1 )
境 条 件 的影 响 。
因此 ,越 来 越 多 的 学 者 将 目光 投 向 了 无 速 度 传 感 器 控 制 系统 的研 究 【 ” 。 现今 已经 有许 多 方 法 可 以对 电机 转 速 进 行 估计 , 主要有 : 基 于电动机数学模型计算 出转速 ; 利 用 感 应 电
在 高性 能 的 交 流 电机 变 频 调 速 系统 中 ,不管 是 采 用 矢量
控 制还 是 直 接转 矩 控 制 , 转 速 的 观测 和 闭环 控 制环 节 是 必 不 可
待估计参数 的方程作为可调模型 , 将不含未 知参数 的方 程作
为参考模 型 , 并 且 两 个 模 型 具 有 相 同物 理 意 义 的输 出 量 。两
马继 先 , 王 岑, 陈 源
( 江 苏科 技 大 学 江 苏 镇 江 2 1 2 0 0 0 )
摘要 : 基 于 MR A S的 无速 度 传 感 器 矢量 控 制 法把 模 型 参 考 自适 应 法 与 转 速 直接 计 算法 结 合 了起 来 , 设 计 了合 适 的 自适 应控 制率 , 提 高 了转 速 估 计 的精 确 度 , 在此基础上 , 利 用 Ma t l a b / S i mu l i n k构 建 MR A S无 速 度 传 感 器 矢量 控 制 系统 仿 真
少的。 通常 , 采 用 光 电码 盘 等速 度 传感 器 进行 转 速 检测 , 并 反 馈 转 速信 号 。但 是 , 速 度 传感 器 的 安装 给 系统 带 来 一些 缺 陷 :
1 ) 增加系统的成本 , 码 盘精 度 越 高 , 价格越贵 ; 2 ) 码 盘 在 电 机 轴 上 的 安 装 存 在 同心 度 问 题 ,安 装 不 当 将影响测速精度 ;
s y s t e m h a s a c e r t a i n ob r u s t n e s s .
Ke y wo r d s : P MS M; mo d e l r e f e r e n c e a d a p t i v e s y s t e m; s e n s o r l e s s ; Ma t l a b / S i mu l i n k
S i mu l a t i o n r e s e a r c h o f PM SM s e n s o r l e s s v e c t o r c o nt r o l ba s e d o n M RAS
MA J i - x i a n, W ANG Ce n, C HEN Yu a n
个模 型同时工作 , 利 用 输 出量 之 间 的差 值 构 成 合 适 的 自适 应 率, 调节 可调模 型的参 数 , 以 达 到 控 制 对 象 输 出跟 踪 参 考 模
型 的 目的陶 。
永磁同步 电机在两相旋转 ( 由) 坐标下的定子电流方程为 :
3 ) 增 加 了 电机 轴 向设 备 , 给电机的维护带来一定困难 ;
( J i a n g s u U n i v e r s i t y o fS c i e n c e a n d T e c h n o l o g y , Z h e n j i a  ̄ g 2 1 2 0 0 0 , C h i n a )
Abs t r a c t : Ba s e d o n t h e MRAS me t h o d o f s p e e d s e n s o r l e s s v e c t o r c o n t r o l c o mb i n e s t h e MRAS me t h o d a n d d i r e c t c a l c u l a t i o n o f s p e e d . I t h a s a p r o p e r a d a p t i v e c o n t r o l r u l e . I t c a n i mp r o v e t h e s p e e d e s t i ma t i o n a c c u r a c y . Ac c o r d i n g t O t h i s , i t U S e S Ma t l a b/ S i mu l i n k t o b u i l d s p e e d s e n s o r l e s s v e c t o r c o n t r o l s y s t e m,t h e r e s u l t s s h o w t h a t t h e s p e e d e s t i ma t i o n a c c u r a c y i s h i g h ,t h e
模 型, 仿 真 结 果表 明 , 转 速 估 计精 度 较 高 , 系统 具 有 一 定 的 鲁 棒 性 。
关键词 : 永磁 同步电机 ; 模 型参考 自适应 ; 无速度 传感器; Ma t l a b / S i m u l i n k
中图分类号 : T M3 4 1 文 献 标识 码 : A 文 章 编 号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 5 ) 1 0 — 0 0 8 9 — 0 4