摩擦力常见模型
动力学中的摩擦力计算方法
动力学中的摩擦力计算方法摩擦力是物体相对运动时产生的一种阻力,它对于动力学的研究和应用具有重要意义。
在工程和科学领域中,正确计算摩擦力是设计和预测物体运动行为的关键因素之一。
本文将介绍动力学中的摩擦力计算方法。
一、背景介绍在物体相对运动中,摩擦力是由于物体表面间的接触而产生的阻力。
它的大小取决于物体之间的压力和两种物质之间的摩擦系数。
摩擦力的计算方法因系统的不同而异,下面将介绍几种常用的计算方法。
二、静摩擦力计算方法静摩擦力是指当物体处于静止状态时,所需要克服的摩擦力。
静摩擦力的计算可以采用以下公式:F_s = μ_s * N其中,F_s为静摩擦力,μ_s为静摩擦系数,N为物体受力的垂直分量。
三、动摩擦力计算方法动摩擦力是指当物体处于运动状态时,所需要克服的摩擦力。
动摩擦力的计算可以采用以下公式:F_k = μ_k * N其中,F_k为动摩擦力,μ_k为动摩擦系数,N为物体受力的垂直分量。
四、滑动摩擦力计算方法滑动摩擦力是指当物体发生滑动时,所产生的摩擦力。
滑动摩擦力的计算方法相对复杂,需要考虑物体表面的微观特征和相对运动速度。
一种常用的计算方法是库伦模型:F = μ * N * A其中,F为滑动摩擦力,μ为滑动摩擦系数,N为物体受力的垂直分量,A为物体表面的接触面积。
五、应用举例1. 在机械工程领域,摩擦力计算对于设计机械传动系统和运动控制系统至关重要。
通过准确计算摩擦力,可以确保机械设备的运行稳定性和高效性。
2. 在车辆工程领域,摩擦力计算是研究车辆行驶性能和制动系统的关键因素。
通过合理计算摩擦力,可以预测车辆在不同路面条件下的制动距离和牵引力。
3. 在物理学和力学研究中,摩擦力的计算对于解释物体相对运动和粒子间相互作用的规律具有重要意义。
六、总结摩擦力的计算方法是动力学研究和实际应用中不可或缺的一部分。
通过合理选择摩擦力计算方法,可以准确预测物体运动的行为,并为实际工程应用提供参考依据。
然而,摩擦力的计算仍然是一个复杂的问题,需要考虑多种因素的综合影响。
摩擦力的几个常见模型

有关摩擦力的几个常见模型 1、斜面模型。
通用条件:物体的质量为m ,与斜面的动摩擦因数为μ,斜面的倾角为θ。
重点:根据牛顿第二定律,加速度的方向与合外力的方向一致。
方法:受力分析→正交分解→写出加速度表达式 (1)斜面相对于地面静止,物体相对斜面下滑。
(2)斜面相对地面静止,物体相对斜面上滑。
【注意:物体上滑可能是具有向上的初速度,所以存在关系,与摩擦力的方向无关,根据物体相对运动(趋势)的方向来判断摩擦力的方向。
】(3)斜面和物体都静止【注:因为加速度向右,所以合外力向右,重力和支持力的合力向左,所以一定有沿斜面向右的摩擦力与其对应,使得合外力向右。
】(4)斜面和物体都静止此时加速度方向向左,N 与G 的合力有可能向左,若只有这两个力,则应满足下列平衡方程: N ·cosθ=mg ① N ·sinθ=ma ② ②÷①得:a=g ·tan θ因为a 具有不确定性,所以进行如下分类讨论:1、a=g ·tan θ2、a >g ·tan θ3、a <g ·tan θ 不存在摩擦力 存在向下摩擦力f 1 存在向上的摩擦力f 2avav avav(5)斜面和物体都相对静止。
(同情况三) (6)斜面和物体相对静止。
(同情况四)2、杆与绳绳子产生的弹力必定沿着绳子,杆产生的弹力不一定沿着杆。
悬线与垂直方向夹角为θ,球与车相对静止。
求车的加速度。
将拉力T 正交分解,竖直、水平方向分别列方程: T ·cosθ=mg ① T ·sinθ=ma ②综合①、②两式,得到a=g ·tan θ 3、滑轮与绳结穿过光滑的滑轮,绳子上的弹力处处相等。
绳结两侧应该视为不同的绳子,大小不一定相等。
同一条绳子,弯折处右摩擦力,两侧的弹力也不一定相等。
(1)物体的质量为m ,倾斜绳与水平杆的夹角为θ,求BA 对A 的拉力、OA 对A 的支持力,绳子上A 点对OA 的压力。
理论力学中的摩擦力模型有哪些?
理论力学中的摩擦力模型有哪些?在理论力学的领域中,摩擦力是一个不可忽视的重要概念。
它在物体的运动和相互作用中扮演着关键角色,对于准确描述和预测物体的行为具有重要意义。
接下来,让我们一起深入探讨理论力学中常见的摩擦力模型。
首先要了解的是静摩擦力模型。
当两个物体相对静止,但有相对运动的趋势时,产生的摩擦力就是静摩擦力。
静摩擦力的大小有一个特点,它会在一定范围内随着外力的增大而增大,以阻止物体的相对运动。
直到外力超过了某个临界值,物体才开始相对运动。
这个临界值被称为最大静摩擦力。
最大静摩擦力通常可以用公式$f_s =\mu_s N$ 来计算,其中$f_s$ 表示最大静摩擦力,$\mu_s$ 是静摩擦系数,$N$ 是接触面之间的正压力。
需要注意的是,静摩擦系数的大小取决于接触面的材料和表面状况等因素。
在实际情况中,静摩擦力的大小取决于物体所受到的外力以及物体保持静止的趋势。
比如,当我们试图推动一个放在地面上的沉重箱子时,如果施加的力较小,箱子不会移动,此时静摩擦力的大小就等于我们施加的推力。
随着推力的逐渐增大,静摩擦力也随之增大,直到推力超过最大静摩擦力,箱子才会开始滑动。
接下来是动摩擦力模型。
一旦物体开始相对运动,静摩擦力就转变为动摩擦力。
动摩擦力通常比最大静摩擦力小,并且相对稳定。
动摩擦力可以分为两种:滑动摩擦力和滚动摩擦力。
滑动摩擦力的大小可以用公式$f_k =\mu_k N$ 来计算,其中$f_k$ 表示滑动摩擦力,$\mu_k$ 是动摩擦系数,$N$ 同样是接触面之间的正压力。
动摩擦系数一般小于静摩擦系数。
例如,在一个粗糙的平面上滑动一个木块,木块所受到的摩擦力就是滑动摩擦力。
其大小取决于接触面的性质和正压力的大小。
滚动摩擦力则是当物体在接触面上滚动时产生的摩擦力。
相比于滑动摩擦力,滚动摩擦力通常要小得多。
这也是为什么在很多情况下,我们会选择使用轮子或滚珠来减少摩擦力,以提高效率和减少能量损耗。
第3讲板块模型中的摩擦力

第三讲板块模型中的摩擦力分析计算板块模型中的摩擦力要注意如下几点:①板块模型中一般有多个接触面,首先要分析清楚每一层接触面上是何种性质的摩擦力;②若是静摩擦力,则与平行接触面上的力与运动状态有尖,一般根据平衡条件或牛顿第二定律计算;③若是滑动摩擦力,则可以根据公式f= yF计算,注意每一层接触面上的正压力一般不同。
热点题型1、板块均静止【例1】如图所示,物体a、b和c叠放在水平桌面上,水平为Fb二5N、Fu 10N分别作用于物体b、c上,a、b和c仍保持静止.以fi、f2、f3分别表示a与b、b与c、c与桌面间的静摩擦力的大小,则()A . fi= 5N , f2二0, f3二5NC. f i二0, f2= 5N , f3二5NB . fi二5N , f2二5N, f3二D . fi 二0, f2= 10N , f3二5N热点题型2、板静块动【例2】如图所示,质量为m的木块在置于水平面上的木板上滑行,木板静止,木块与木板、木板与桌面间的动摩擦因数均为y,木板质量为3m,则桌面给木板的摩擦力大小为()木块一I 木庐uurrnrEA . y mgB . 2y mg C. 3 y mg D. 4 y mg热点题型3、板动块静【例3】一个木块A放在长木板B上,长木板B放在水平地面上,在恒力F作用下,长木板B以速度v匀速运动,水平的弹簧秤示数为To下列矢于摩擦力的说法正确的是()A .木块A受到的滑动摩擦力的大小等于TB .木块A受到的静摩擦力的大小等于TC .若长木板B以2v速度匀速运动时,木块A受到的摩擦力的大小等于2TD .若用2F的力作用在长木板B上,木块A受到的摩擦力大小等于T热点题型4、板块一起动【例4】如图所示,C是水平地面,A、B是两个长方形物块,F是作用在物块B上沿水平方向的力,物体A和B以相同的速度作匀速直线运动。
由此可知,A、B间的摩擦力fi和B、C间的摩擦力也有可能是()【例5]两重叠在一起的滑块A 、B ,质量分别为M 、m, A 与斜面间的动摩擦因数为B 与A 之间的动 摩擦因数为 炉两滑块保持相对静止,从倾角为B 的固定斜面上匀速下滑,如图・则在滑块下滑的过程中下列说法正确的是( ) A .斜面受到滑块A 的摩擦力大小等于mmgcosB,方向沿斜面向下B . pi =ta n 0C. A 、B 间摩擦力等于零D . A 、B 间摩擦力大小等于 pmgcos 0热点题型5、板块连滑轮【例6】(2006年全国理综2)如图,位于水平桌面上的物块P,由跨过定滑轮的轻绳与物块Q 相连,从滑轮P 到 Q 的两段绳都是水平的•已知Q 与P 之间以及P 与桌面之间的动摩擦因数都是P 两物块的质量都是m,滑轮的质 量、滑轮轴上的摩擦都不计•若用一水平向右的力F 拉P 使它做匀速运动,则F 的大小为 ® L 卩~* F 〜〜丄〉A . 4 p mgB ・ 3 p mgC ・ 2 p mgD ・ p mg练习1、如图所示,两物块叠放在水平面上,当用一水平力F 推物块A 时,力B 仍保持静止。
滑动摩擦力做功“Q=fs相对”模型

摩擦生热的“Q=f ·s 相对”模型太原市第十二中学 姚维明模型建构:摩擦力属于“耗散力”,做功与路径有关,如果考虑摩擦力做功的过程中与产生热能关系时,很多学生就会对之束手无策,从近几年的高考命题中,这类问题是重点也是难点问题,以下就针对摩擦力做功与产生热能的关系作一总结的分析.【模型】一个物体在另一个物体上相对滑动, 摩擦产生的热量“Q=f ·s 相对”【特点】①只有滑动摩擦力才能产生内能,静摩擦力不会产生内能;②摩擦产生的内能等于滑动摩擦力与相对路程的乘积;③一般要结合动量守恒定律解题;④两物体速度相同时,发热产生的内能最大。
【模型1】如图1所示,在光滑水平面上放一质量为M 的长木板,质量为m 的小物体从木板左侧以初速度v 0滑上木板,物体与木板之间的滑动摩擦系数为μ,求⑴最终两者的速度⑵系统发热产生的内能〖解析〗⑴物体滑上木板后受摩擦阻力作用做减速运动,而木板受摩擦动力作用做加速运动,当两者速度相同时,无相对运动,滑动摩擦力消失,以后系统以共同的速度匀速运动根据动量定理:m v 0=(m+M )v解得:0v mM m v += ⑵如图9所示,设物体对地的位移为s 1,木板对地的位移为s 2 根据动能定理: 对m :20212121mv mv mgs -=-μ 对M : 2221Mv mgs =μ 解得: )2121(21)(222021Mv mv mv s s mg +-=-μ =mM M mv 2120+∙ 可见:系统机械能的减少量全部转变成了内能。
发热损失的能量Q=μmgs 相对模型典案:【典案1】如图11所示,质量为M=1kg 的平板车左端放一质量为m=2kg 的物体与车的摩擦系数μ=0.5。
开始车与物体同以v 0=6m/s 的速度向右在光滑水平面上运动,并使车与墙发生正碰。
设车与墙碰撞时间极短,且碰后车的速率与碰前相等,车身足够长。
求:图1⑴物体相对车的位移⑵小车第一次与墙碰撞以后,小车运动的位移。
“摩擦角”和“摩擦力”

1 Fmin mg tan tan
Fmax mg tan tan
1
静摩擦力达到最大时, 斜面约束力作用线方向 与斜面法线成摩擦角!
F约 F约
Fmin m Fmax
tan-1
tan-1
mg
sin cos sin cos mg F mg cos sin cos sin
F0
(1)F3与“摩擦线”垂直。显然,在所有令木块 F m gsin mg 匀速运动的拉力中F3最小。即有: 1 见《3+2》P33例1 (2)当拉力F与重力的夹角小于等于“摩擦角” 时(如F0),无论取多大,约束力与支持力的夹角 α都不可能等于θ。由情景1知,此时木块恒静止。 这种现象称为“自锁”。
问题思考:
• 如果拉力大小确定,则其方向如何时物体受到的 合力最大?(也即有最大的加速度?)
FR mg C F O
F合
例1 如图所示,用绳通过定滑轮牵引物块,使物块在水平面 上从图示位置开始沿地面做匀速直线运动,若物块与地面间的 动摩擦因数μ<1,滑轮的质量及摩擦不计,则在物块运动过程 中,以下判断正确的是 A. 绳子拉力将保持不变 B. 绳子拉力将不断增大 C. 地面对物块的摩擦力不断减小 D. 物块对地面的压力不断减小
“摩擦角”和摩擦力
1、有关摩擦力的性质和“三角形定则”
FN f F f FR FN
F
G
G
• 基本模型:地面对木块有支持力和摩擦力作用, 把支持力和摩擦力的合力FR叫做地面对物体的 全约束反力,简称约束力(也有叫“全反 力”)。 如果木块在F作用下运动或恰好达到最大静摩擦 FN f f F 力 tan ,θ 称 N ,θ 满足:
滑动摩擦力做功的“W=-μG·x”模型
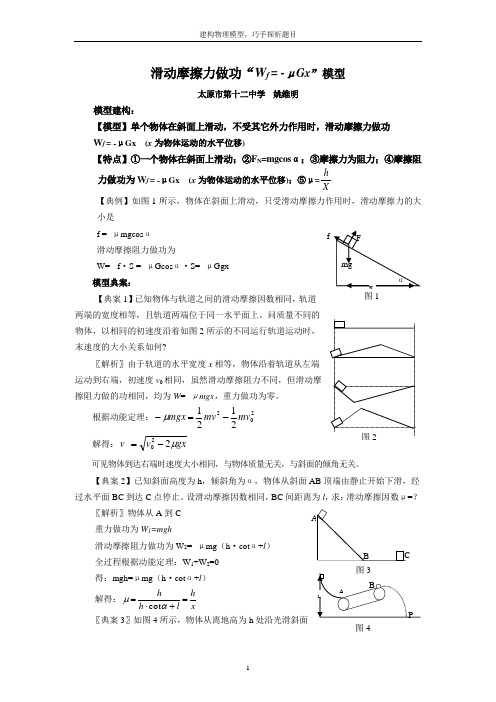
滑动摩擦力做功“W f = -μGx ”模型太原市第十二中学 姚维明模型建构:【模型】单个物体在斜面上滑动,不受其它外力作用时,滑动摩擦力做功 W f = -μGx (x 为物体运动的水平位移)【特点】①一个物体在斜面上滑动;②F N =mgcos α;③摩擦力为阻力;④摩擦阻力做功为W f = -μGx (x 为物体运动的水平位移);⑤μ=Xh【典例】如图1所示,物体在斜面上滑动,只受滑动摩擦力作用时,滑动摩擦力的大小是f = -μmgcos α 滑动摩擦阻力做功为W= - f ·S = -μGcos α·S= -μGgx 模型典案:【典案1】已知物体与轨道之间的滑动摩擦因数相同,轨道两端的宽度相等,且轨道两端位于同一水平面上。
问质量不同的物体,以相同的初速度沿着如图2所示的不同运行轨道运动时,末速度的大小关系如何?〖解析〗由于轨道的水平宽度x 相等,物体沿着轨道从左端运动到右端,初速度v 0相同,虽然滑动摩擦阻力不同,但滑动摩擦阻力做的功相同,均为W = -μmgx ,重力做功为零。
根据动能定理:2022121mvmvmgx -=-μ解得:gx v v μ220-=可见物体到达右端时速度大小相同,与物体质量无关,与斜面的倾角无关。
【典案2】已知斜面高度为h ,倾斜角为α,物体从斜面AB 顶端由静止开始下滑,经过水平面BC 到达C 点停止。
设滑动摩擦因数相同,BC 间距离为l ,求:滑动摩擦因数μ=?〖解析〗物体从A 到C 重力做功为W 1=mgh滑动摩擦阻力做功为W 2= -μmg (h ·cot α+l ) 全过程根据动能定理:W 1+W 2=0 得:mgh=μmg (h ·cot α+l ) 解得:xh lh h =+⋅=αμcot〖典案3〗如图4所示,物体从离地高为h 处沿光滑斜面f图4自由滑下,然后进入倾斜的传送带上,物体与传送带之间存在摩擦。
摩擦力综合应用——“子弹打木块”模型2008、12、21
江西省兴国县第三中学丘欣成刘立平魏兆城2008年12月一、知识联系1、摩擦力是高中力学三类常见的力之一,是受力分析的基础,是力学的基础,非常重要。
在教学中应引导学生充分运用已知的物理知识和方法规律进行分析和探索,充分了解摩擦力在力学运用中的作用和地位,使学生在实践中亲自体验物理问题处理的思维方法。
2、“子弹打木块模型(包括板块模型)”是两物体在一对相互作用的摩擦力作用下的运动,并通过摩擦力做功实现不同形式能量之间的转化.因此,“子弹打木块”的模型可以拓展到能量转换及动量转换的层面上全面考虑,成为高考考查的一个经典模型。
所以在“子弹打木块”的模型分析处理中可以对摩擦力的理解更加丰富、深刻。
二、综合分析与应用1、动力学特征:子弹射入木块后,子弹m 受木块M 的摩擦阻力做匀减速运动,木块受子弹的摩擦动力而从静止开始做匀加速运动,经一段时间t,两者达到相同的速度v 处于相对静止,m 就不至于从M 中穿出,在此过程中,子弹在木块中进入的深度d 即为木块的最短长度,此后,m 和M 以共同速度v 一起做匀速直线运动.由牛顿第二定律和运动学公式:对m :-f =ma 112012122a v a v S -=对M :f =M a 22222a v s =所以:d=s 1-s 2小结:摩擦力对m 、M 分别是合力,提供加速度。
2.运动学特征“子弹”穿过“木块”可看作为两个做匀速直线运动的物体间的追及问题,或说是一个相对运动问题。
在一段时间内“子弹”射入“木块”的深度,就是这段时间内两者相对位移的大小。
s2L s1v0速度—时间图象甲:子弹的匀减速直线运动由图线AB 表示,木块的匀加速直线运动由图线OB 表示.T 0s 末,两图线相交,子弹和木块的速度相等,即子弹停留在木块里或恰好打穿木块.此后,两者做匀速直线运动由图线BC 表示. 图乙则表示t 1s 末,子弹穿出木块后两者在水平方向上以不同的速度做匀速直线运动.v ′ v 0v 0 t A B C t0 两者间的相对位移木块的长度甲2.动量变化特征摩擦力对“子弹”的冲量使“子弹”动量减小;摩擦力对“木块”的冲量使“木块”动量增加,此时摩擦力是一对相互作用力,并且作用时间相等,系统不受外力作用,故而遵从动量守恒定律。
多体系统中典型铰的摩擦力计算模型
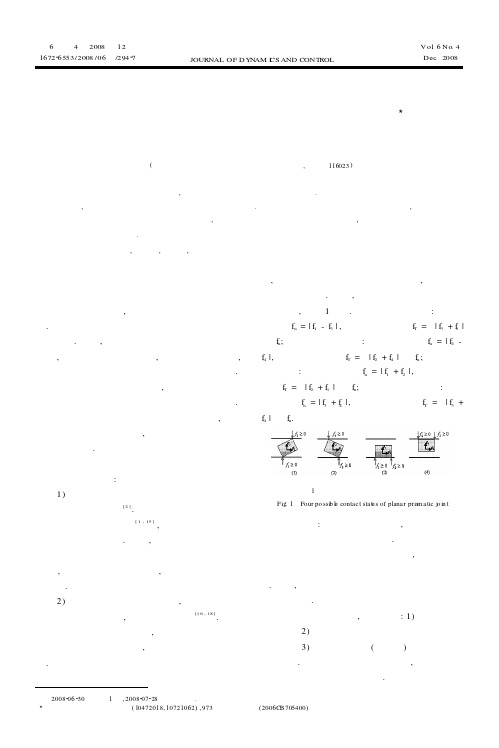
第6卷第4期2008年12月167226553/2008/06⑷/29427动力学与控制学报JOURNAL OF DY N AM I CS AND CONT ROLVol .6No .4Dec .20082623收到第稿,22收到修改稿3国家自然科学基金资助项目(,6),3计划资助项目(6B 5)多体系统中典型铰的摩擦力计算模型3齐朝晖 罗晓明 黄志浩(大连理工大学工业装备结构分析国家重点实验室,大连 116023)摘要 在铰内间隙很小的前提下,多体系统中铰仍具有运动学约束作用.但由于铰内接触形式与系统状态相关,铰内摩擦力与约束反力之间具有复杂的函数关系.本文在假设铰内接触为刚性接触的前提下,基于分布接触反力与点接触反力之间的等效关系,给出了几种典型铰内摩擦力的计算模型,并通过数值算例验证了所提模型的正确性.关键词 多体系统, 摩擦, 间隙, 铰引言实际机械系统中,铰中的摩擦几乎是不可避免的.摩擦对很多机械系统的动力学行为有着不可忽略的影响.例如,在接近真空环境工作的探测器中的铰,由于不能采用液体润滑,摩擦效应非常突出,对探测器的每一次操作都会引起结构的整体振动.如果不能有效地抑制这种振动,探测器就不得不等待振动衰减到一定幅度以下才能进行下一次动作.在多体系统动力学中考虑铰中摩擦力的影响,无疑会使分析结果更符合实际,从而为利用或减少摩擦提供参考依据.建立多体系统中铰内摩擦力的计算模型主要有以下可两种方式:1)认为铰所连接的两个物体在铰内做一系列含摩擦接触碰撞运动[2].其突出优点是可以利用单面约束的相关研究成果[1-15],并且至少在形式上更符合实际物理过程.然而,由于这种方法实际上相当于通过铰内的接触碰撞体现铰的运动学约束作用,相应的计算量过于庞大,以至于其现实性受到质疑.2)保持铰的运动学约束作用,考虑铰内的间隙对接触形式的影响,但忽略碰撞效应[16-18].这种方法保持了铰的运动学约束,同时又避免了由于考虑碰撞所引起的数值病态,因而具有很好的发展前景.铰的约束反力实际上是通过铰内的接触产生的,铰中的摩擦力不仅与约束反力相关,还与铰内的接触方式相关.例如,平面滑移铰中常见的四种接触方式,如图1所示.第一种接触方式中:约束反力的模f n =|f 1-f 3|,摩擦力的大小为f T =μ|f 3+f 1|≠μf n ;第二种接触方式中:约束反力的模f n =|f 2-f 4|,摩擦力的大小为f T =μ|f 2+f 4|≠μf n ;第三种接触方式中:约束反力的模f n =|f 1+f 2|,摩擦力的大小为f T =μ|f 2+f 1|≠μf n ;第四种接触方式中:约束反力的模f n =|f 3+f 4|,摩擦力的大小为f T =μ|f 3+f 4|≠μf n.图1 平面棱柱铰的四种可能接触状态Fig .1 Four po ssi b l e contact stat es of planar pris m atic j o i n t由此可见:即使忽略碰撞效应,铰内的摩擦力计算模型也不是一个简单的问题.相关文献中大多数采用凭直觉列出铰的可能接触形式,进而针对每一种接触形式考虑摩擦力与铰约束反力之间的关系.然而,这种方法难以分析稍稍复杂一些的万向节、楞住铰等.为了突出主要矛盾,我们假设:1)组成铰的构件是刚体2)铰内的间隙为无穷小以至于碰撞效应可以忽略3)铰内的面接触(线接触)可以等效为几个点接触.在以上合理假设的基础上,本文给出了几种典型铰的摩擦力计算模型200800120080728.10472018107210297200C 70400.第4期齐朝晖等:多体系统中典型铰的摩擦力计算模型1 分布接触反力与点接触反力之间的等效刚体B a 和刚体B b 之间发生面接触,刚体B a上的接触面为P a ,其外法线矢量为n,如图2所示.P a 内参考点p 的相对运动速度v p =v 1e 1+v 2e 2,P a内坐标为(x,y )点相对运动速度v =(v 1-ωy )e 1+(v 2+ωx )e 2,其中ω为P a 的相对运动角速度.假设P a 上正压应力为n σ(x,y ),摩擦系数为μ,则相应的摩擦应力图2 接触面内的相对运动Fig .2 Relative move ment in the con t act s u rfaceτ=-μσ|v |((v 1-ωy )e 1+(v 2+ωx )e 2)(1)接触面上接触反力的合力及相对于p 点的合力矩分别为f n =nσ0(2)m n =σ2e 1-σ1e 2(3)接触面上的摩擦力f T =-μ(τ0v 1-ωτ2)e 1-μ(τ0v 2+ωτ1)e 2(4)m T =-μ(τ1v 2-τ2v 1+ωτ3)e 3(5)其中σ0=κSσd x d y; σ1=κSσx d x d y ;σ2=κSσy d x d y (6)τ0=κSσ|v |d x d y; τ1=κSσ|v |x d x d y ;τ2=κSσ|v |y d x d y;τ3=κSσ|v |(x 2+y 2)d x d y(7)如果将分布式的接触力等效为接触面上几个点处的集中接触力,两者必须形成等效力系,即 ∑i f i =σ0; ∑i (f i y i )=σ2; ∑i(f i x i )=σ1(8)∑f ωy (ωy )+(+ωx )=τωτ()∑if i v 2+ωx i(v 1-ωy i )2+(v 2+ωx i )2=τ0v 2+ωτ1(10)∑if i x i v 2-y i v 1+ω(x 2i +y 2i )(v 1-ωy i )2+(v 2+ωx i )2= τ1v 2-τ2v 1+ωτ2(11)如果接触面内各点的相对运动速度方向一致,即ω=0,可以证明:只要(8)式满足,则(9)-(11)式自然成立.2 圆柱铰圆柱铰在两个接触端面上各有一个接触点,其位置可用方位角θ1和θ2确定,如图3所示.接触点处的正压力图3 圆柱铰的接触点Fi g .3 Contact points of cyl i ndrical j ointf 1=-f 1cos θ1e 3-f 1sin θ1e 2(12)f 2=-f 2cos θ2e 3-f 2sin θ2e 2(13)两个接触点处的相对速度分别为v 1=s e 1+ωe 1×R (cos θ1e 3+sin θ1e 2)(14)v 2=s e 1+ωe 1×R (cos θ2e 3+sin θ2e2)(15)式中,R 为圆柱体半径,s 和ω分别为圆柱铰的相对滑移速度和相对转动角速度.两个接触点处摩擦力分别为f T1=f 1(k s e 1-k r c os θ1e 2+k r sin θ1e 3)(16)f T2=f 2(k s e 1-k r c os θ2e 2+k r sin θ2e 3)(17)铰内接触力矩m =(R cos θ1e 3+R sin θ1e 2-ce 1)×(f 1+f T1)+ (R cos θ2e 3+R sin θ2e 2+ce 1)×(f 2+f T2)(18)式中,R 为外圆柱体半径,2c 为圆柱铰左右端面距离.记接触区域中心处的约束反力f c=f c1e 1+f c2e 2+f 33,约束反力矩=++33,由于接触力系与约束反力系相互等效,因而592iiv i -iv 1-i 2v 2i 20v 1-29ce mcm c 1e 1m c 2e 2m ce动 力 学 与 控 制 学 报2008年第6卷f c2f c3mc2m c 3=-1-k r -1-k r k r -1k r-1k r c k s R 2c 2k r c c +k s Rc 2k s Rk r c2k s R -c2k s cf 1sin θ1f 2c os θ1f 2sin θ2f 2c os θ2(19)式中,等效摩擦系数k r =-μωRs +ω2R2;k s =-μss +ω2R2(20)将式(19)中的系数矩阵(简记作A )的逆A -1分解为两个2×4阶矩阵B 1和B 2,对式(19)求逆可得:f 1[sin θ1 cos θ1]=[f c2 f c3 m c2 m c3]B T1(21)f 2[sin θ1 cos θ1]=[f c2 f c 3 m c 2 m c 3]B T2(22)从中可得f 1=1(f c2f c3m c2m c3)B T1B 1(f c2f c3m c2m c3)T(23)f 1=1(f c2f c3m c2m c3)B T2B 2(f c2f c3m c2m c3)T(24)摩擦力引起的轴向力和轴向力矩f T =k s (f 1+f 2)e 1(25)m =k r R (f 1+f 2)e 1(26)3 旋转铰与圆柱铰相比,理想旋转铰的左右端面是封闭的,当内圆柱体在铰内做相对运动时可能与其发生接触.假设旋转铰内的接触形式都是点接触,则可能的接触点只有四个,如图4所示.图4 旋转铰的接触点Fig .4 Contact points of revolute joint以内外圆柱体中心重合并且轴线平行位置作为参照,内圆柱体在铰内的相对位置可由内圆柱体中心的相对位移,,3,相对转角β,β3以及旋转铰内外半径差δ描述其中,左端面方位角为θL 点处的位移u L1u L2u L3=u 1u 2u 3-0-R cos θLR sin θLR cos θL 0c-R sin θL-c0β2β3(27)式中,R 为内圆柱体半径,2c 为旋转铰左右端面间的距离.接触点p 3的方位角θ3对应u L1-u 1的极值点,即:9u L 19θθ=θ3=0→sin θ3=κ1β3; c os θ3=-κ1β2(28)相应的极值m 1=-κ1R (β2+γ2)应小于零,因而0<κ1=1β22+β23(29)右端面方位角为θR 点处的位移u R1u R2u R3=u 1u 2u 3-0-R cos θRR sin θRR c os θR 0c-R sin θR-c0β2β3(30)接触点p 4的方位角θ4应使u R1-u 1最大,由此可得:sin θ4=-κ1β3; cos θ4=κ1β2(31)接触点p 1与左端面圆心之间的距离为δ,因而其方位角θ1满足方程u 2-c β3=δsin θ1; u 3+c β2=δcos θ1(32)同理可知:接触点p 2的方位角θ2满足方程u 2+c β3=δsin θ2; u 3-c β2=δcos θ2(33)由式(32)及式(32)可得β2=δ(cos θ1-cos θ2)/2c ;β3=δ(sin θ2-sin θ1)/2c (34)u 2=δ(sin θ2+sin θ1)/2;u 3=δ(cos θ2+cos θ1)/2(35)利用上式,求出比例系数κ1,进而得到接触点方位角之间的关系:sin θ3=(sin θ2-sin θ1)2-2cos (θ2-θ1);c os θ3=(c os θ2-cos θ1)2-2cos (θ2-θ1)(36)sin θ4=-sin θ3; cos θ4=-c os θ3(37)由于内圆柱体不可能同时接触左右端面,轴向接触反力3=3; =(3)满足互补方程692u 1u 2u 2.g g e 1g 4-g 4e 18第4期齐朝晖等:多体系统中典型铰的摩擦力计算模型0≤g3⊥g4≥0(39)记铰中心处的约束反力f c=f c1e1+f c2e2+f c3e3,约束反力矩m c=m c1e1+m c2e2+m c3e3.其中,f c1由轴向接触力合成,即f c 1=g3-g4(40)结合互补条件式(39)可知:g 3=f c1;g4=0(f c1>0)g4=-f c1;g3=0(f c1<0)(41)接触点p1,p2的法向接触反力及其相对于铰中心的力矩分别为:f n1=-f1(sinθ1e2+cosθ1e3);m n1=cf1(sinθ1e3-cosθ1e2)(42)f n2=-f2(sinθ2e2+cosθ2e3);m n2=-cf2(sinθ2e3-cosθ2e2)(43)式中,2c为左右端面间的距离,并且f1≥0,f2≥0.接触点p3,p4的轴向接触反力相对于铰中心的力矩分别为:m n3=g3R(cosθ3e2-sinθ3e3);m n4=-g4R(cosθ4e2-sinθ4e3)(44)接触点处的相对速度分别为:vi=ωR(sinθie3-cosθie2)(i=1,2,3,4)(45)由库伦摩擦定律,铰内接触点处的摩擦力及其相对于铰中心的力矩分别为:f T1=-μf1(sinθ1e3-cosθ1e2);m T1=-cμf1(cosθ1e3+sinθ1e2)(46)f T2=-μf2(sinθ2e3-cosθ2e2);m T2=cμf2(cosθ2e3+sinθ2e2)(47)f T3=-μg3(sinθ3e3-cosθ3e2);m T3=-cμg3(cosθ3e3+sinθ3e2)(48)f T4=-μg4(sinθ4e3-cosθ4e2);m T4=cμg4(c osθ4e3+sinθ4e2)(49)由约束反力系与接触力系之间的互等关系可得: f c2f c3m c2m c3=-1μ-1μ-μ-1-μ-1-cμ-c cμcc-cμ-c cμf1sinθ1f1cosθ1f2sinθ2f2cosθ2+0μ0μ-μ0-μ0-cμR cμ-R-R cμR-cμg3sinθ3g3cosθ3g4sinθ4g4cosθ4(50)通过对系数矩阵求逆可得:f c2f c3 m c2 m c3=f1sinθ1f1cosθ1f2sinθ2f2cosθ2+2cμ2-R-RμR(R-2c)μ(2c+R)μ-R-Rμ2cμ2+RR(R-2c)μ2cμ2-R-Rμ-Rμ2cμ2+R(2c+R)μ-Rg3sinθ3g3cosθ3g4sinθ4g4cosθ4(51)式中f c2f c3m c2m c3=12c(1+μ2)-c-cμ-μ1cμ-c-1-μ-c-cμμ-1cμ-c1μf c2f c3m c2m c3; g3g4=12c(1+μ2)g3g4(52)将式(36)和式(37)代入式(51)中,可求得接触反力f1和f2,以及摩擦力引起的轴向力矩m c1=μR(f1+f2+g3+g4)(53)4 万向节万向节可以看作为两个旋转铰的组合.其中,水平轴上的接触点方位角分别为θ,θ,θ3,θ;竖直轴上接触点方位角分别为θ5,θ6,θ,θ;其含义与旋转铰相应变量相同,如图5所示图5 万向节接触点与接触反力F5 f f j79212478.ig.Contact points and con t act orces o univers al oint动 力 学 与 控 制 学 报2008年第6卷不失一般性,假设水平转轴和内接物体相连,竖直转轴和外接物体相连,作用在内接物体上的约束反力在铰点处的等效力系为(f c,m c).根据旋转铰中铰点处约束反力与铰内接触反力之间的关系可得:f c2f c3m c2m c3=-1μ-1μ-μ-1-μ-1-c1μ-c1c1μc1c1-c1μ-c1c1μf1sinθ1f1cosθ1f2sinθ2f2cosθ2+0μ0μ-μ0-μ0-c1μR1c1μ-R1-R1c1μR1-c1μg3sinθ3g3cosθ3g4sinθ4g4cosθ4(54)式中2c1为水平轴的长度,R1为水平轴的半径.按(45)式求得水平方向接触反力g3,g4后,由上式就可得到纵向接触反力f1,f2.水平方向的摩擦力矩m c1=μR1(f1+f2+g3+g4)(55)将坐标基矢量做替换:e1→e2,e2→e3,e3→e1,竖直轴上的接触反力就可按水平轴相应的方法计算.竖直轴上的接触力(含摩擦力)与水平轴上的接触力(含摩擦力)一起构成平衡力系:-f c3f c1m c3m c1=-1μ-1μ-μ-1-μ-1-c2μ-c2c2μc2c2-c2μ-c2c2μf5sinθ7f5cosθ7f6sinθ6f6cosθ6+0μ0μ-μ0-μ0-c2μR2c2μ-R2-R2c2μR2-c2μg7sinθ7g7cosθ7g8sinθ8g8cosθ8(56)式中2c2为竖直轴的长度,R2为竖直轴的半径.轴向接触反由下式求得:g 7=f c2; g8=0(f c2>0)g8=-f c2; g7=0(f c2<0)(57)沿竖直轴方向的摩擦力矩-m c2=μR2(f5+f6+g7+g8)(58) 5 数值算例如图6所示单摆,其长L=,宽和高分别为==单摆的质量密度为ρ=3,重力加速度=665,方向沿y轴负方向单摆与基座之间通过圆柱铰连接,圆柱铰的摩擦半径R= 0.05m,左右端面的距离为单位值,初始位置水平,轴向初始速度为v=1m/s,摩擦系数μ=0.1.图6 单摆模型Fig.6 Single p endulummodel图7 轴向摩擦力Fi g.7 Fricti on along theaxis图8 轴向摩擦力矩Fi g.8 T o rque of fricti on al ong theaxis图 单摆的角速度F y f8 9 21m a b0.1m.7800kg/mg9.80.9ig.9Angular vel ocit o the si ngle p endulum第4期齐朝晖等:多体系统中典型铰的摩擦力计算模型计算结果如图7-图9所示,其中,3线为AD 2A MS 计算结果,—线为本文计算结果.由以上结果可以看出,本文计算结果和AD 2A MS 结果是一致的,说明本文建立的摩擦力模型是正确的.利用本文所述方法还可以容易地得到左右端面的接触形式,如图10-图11所示.图10 方位角θ1Fig .10 O rien t ati on angle θ1图11 方位角θ2Fig .11 O rien t ati on angle θ26 结束语实际机械系统中铰内的间隙都是很小的,但摩擦力往往是不可忽略的.本文所提出的方法一方面充分考虑了铰内间隙的影响,另一方面有又保留了铰的运动学约束作用,是一种现实可行的方法.参 考 文 献1 阎绍泽,陈鹿民,季林红,俞武勇,金德闻.含间隙铰的机械多体系统动力学模型.振动工程学报,2003,16(3):290~294(Yan Shaoze ,Chen Lu m in,Ji L inhong,Yu Wuy ong,Jin Dewen .Dyna m ic modeli ng of m ultibody system j f V ,3,6(3)~()) 王剑峰,王琪含干摩擦多体系统L 方程的数值算法.动力学与控制学报,2004,2(2):58~61(WangJ i anfeng,W ang Qi .T he nu m erical me th od for Lagrange ’s e 2qua tions of multibody s ystem with dry fric ti on .Journa l of Dynam ics a nd Control ,2004,2(2):58~61(in Chinese))3 丁遂亮,洪嘉振.柔性多体系统接触碰撞动力学研究.上海交通大学学报,2003,37(12):1927~1930(D i ng Suil 2iang,Hong J iazhen .Dynam ic analysis of i mpac t l oads in flexibl e m ultibody syste m s by FE M .Engineering Mecha ni cs ,2003,37(12):1927~1930(in Chine s e ))4 郭安萍,洪嘉振,杨辉.柔性多体系统接触碰撞子结构动力学模型.中国科学(E 辑),2002,32(6):765~770(Guo Anping,Hong J iazhen ,Yang Hui .Cont ac t -i m pact substructure mode l for dynam ics of flexible multibody sys 2tem.Science in China (Series E ),2002,32(6):765~770(i n Chine se ))5 盛立伟,刘锦阳,余征跃.柔性多体系统弹性碰撞动力学建模.上海交通大学学报,2006,40(10):1790~1797(Sheng Li wei,L iu J inyang,Y u Zhengyue.Dynam i c model 2ing of a flexible multibody syste m with elastic i m pact .J our 2na l of Sha ngha i J iaotong U niv ersity ,2006,40(10):1790~1797(in Chinese))6 刘才山,陈滨,彭瀚,乔勇.多体系统多点碰撞接触问题的数值求解方法.动力学与控制学报,2003,1(1):59~65(Liu Ca ishan,Chen B in,Peng Han,Q iao Y ong .Nu m eri 2ca l resol uti on of m ulti -body s ystem swith multi p le contac t/i mpact points .Journa l of D ynam ics and Control,2003,1(1):59~65(i n Chine se ))7 王树勇,袁士杰.多体系统在冲击约束下的碰撞运动.北京理工大学学报,1997,17(2):136~141(WangShuy ong,Y uan Shijie .Collisi on moti on of multibodysyste m s with i mpulsi ve constraints .Journal of Beij ing Institut e of Technol ogy ,1997,17(2):136~141(i n Chine se ))8 I nna Sha rf,Y uni ng Zhang .A contact force s oluti on for n on-colliding contact dynam ic s si mula ti on .Multibody Syst Dyn,2006,16:263~2909 M iha i Anitescu,Gary D Ha rt .A f i xed -point ite rati on ap 2p r oach for m ulti body dynam ics w ith contac t and s m all fric 2ti on .Ma th .P rogram.Ser .B ,2004,101:3~3210 Lar sJohan ss on .A linea r co mp le m entarity alg orith m for rig 2id b ody i m pact with fri c tion .Eur .J.Mech .A /Solids ,1999,18:703~71711 Peng S ong,Jong -Shi Pang,Vijay Ku m ar .A se m i -i m 2f f I f N M ,,63~6992with c learance oints .Journa l o ibra tion Engi neering 2001:290294in Chinese 2.agrange p licit ti me -stepp ing model or ric ti ona l compliant contact p r oble m s .nterna tiona l J ourna l or u m erica l ethods in Engineering 20040:221221动 力 学 与 控 制 学 报2008年第6卷12 Gerhard H i pp m ann .An a l gorith m for co mpliant contact be 2t ween co mp lexly shaped bodie s .M ulti body Syste m D ynam 2ics,2004,12:345~36213 Y Kanno,J A C Ma rtins .A rc -length m ethod for fricti onalcontact problem s usi ng m athema tica l p r ogra mm ing w ith co mplem enta rity constraints .J .O pti m.Theory Appl,2006,131:89~11314 Jong -Shi Pang,Jeffrey C .Trinkle .Co mp le m enta rity for 2m ul a tions and existence of sol u ti ons of dy na m ic multi -rigid -body contact problem s with Coul o m b fric ti on .M a the m a ti 2ca l P rogramm ing,1996,73:199~22615 Ch Gl ocker,F Pfe iffer,M iinchen .Co mp lementarity prob 2lem s in m ultib ody syste m s w ith p l anar fricti on .A rchiv e of Ap pliedM echa nics ,1993,63:452~46316 Pete r Ravn .A Continu ous Analysis Me th od for Plana r M ultibody Syste m s with Joint C lea rance .M ultibo dy Syste m Dynam ics,1998,2:1~2417 Olivie r A Bauchau,Ca rlo L Bottass o .Contact Conditi onsf o r Cylindrica l .P ris ma tic and Screw Joints i n F l exibl e M ultibody System s .M ultibody S y ste m D ynam i cs ,2001,5:251~27818 Paulo Flore s,Jorge A m br ósi o,J Pi menta C l a ro .Dynam i canalysis for plana r multibody mechanical s ystem swit h lubri 2ca ted j oints .M ultibody Syste m D ynam ics ,2004,12:47~74R 3,y 3T j y N N S F f (,6),S y f M j S B R D f (3)(6B 5)FR I C T I O NS IN JO INTS O F M UL T IB ODY SY STEM S3Qi Zhaohui Luo Xiaom ing Huang Zhihao(S t a t e KeyL abora tory of Structura l Ana l ysis for Industria l Equip men t ,D a lian U niv ersity of Technology,D a lian 116023,China )Abstrac t Joints of m ultibody system s can keep their constraints under the conditi on of very s m all clearances .However,the fric ti ons in a j oint a r e involved in the constr a int f orces,as the result of the correla tions bet ween the state of the syste m s and f or m of contact in the joint .Ba sed on the equiva lence of points contac t and distributed contact,we p resented the for m ulati ons of fricti ons in typical j oints w ith s m all c lea r ances on the assumption that the defor m ati ons of j oints are negligible .An exa mp le was given to valida te the presented for m ulati ons .Key wor ds m ultibody syste m s, fricti ons, clearance s, joints03ecei ved 0J une 2008revised 28.Ju l 2008.he pro ect s upported b the ati onal at u ral ci ence oundati on o Ch i na 104720181072102upport ed b a gran t rom the a or tat e asic es earch evelopm en t Pr ogram o China 97Program 200C 70400。
具有摩擦的机械系统的动力学建模

具有摩擦的机械系统的动力学建模摩擦是我们日常生活中常见的现象,它不仅存在于我们的生活中,也广泛应用于各种机械系统中。
对于具有摩擦的机械系统,了解其动力学行为对于设计和优化系统至关重要。
因此,动力学建模成为研究和分析这些系统的重要工具。
在机械系统中,摩擦力是由两个物体之间的接触表面之间的相互作用引起的。
摩擦力的大小与接触表面的性质、物体的质量以及相对运动速度有关。
通常,我们可以将摩擦力分为静摩擦力和动摩擦力。
静摩擦力是当物体相对静止时作用的摩擦力,而动摩擦力则是当物体相对运动时作用的摩擦力。
为了建立具有摩擦的机械系统的动力学模型,我们需要考虑摩擦力对系统的影响。
在建模过程中,我们通常使用拉格朗日方程来描述系统的运动。
拉格朗日方程是一种基于能量的方法,它能够将系统的动力学行为与系统的势能和动能联系起来。
在具有摩擦的机械系统中,我们需要引入摩擦力的模型来描述其影响。
常见的摩擦力模型包括Coulomb摩擦模型和Viscous摩擦模型。
Coulomb摩擦模型是一种常见的模型,它将摩擦力定义为与物体之间的接触力成比例的力。
这种模型适用于描述物体之间的相对运动速度较低的情况。
Viscous摩擦模型则是另一种常见的模型,它将摩擦力定义为与物体之间的相对速度成比例的力。
这种模型适用于描述物体之间的相对运动速度较高的情况。
Viscous摩擦模型还可以进一步分为线性Viscous摩擦模型和非线性Viscous摩擦模型。
线性Viscous摩擦模型假设摩擦力与物体之间的相对速度成正比,而非线性Viscous摩擦模型则假设摩擦力与物体之间的相对速度的平方成正比。
在建立动力学模型时,我们还需要考虑系统的其他因素,如惯性、弹性和阻尼等。
这些因素对系统的运动和稳定性也有重要影响。
通过综合考虑这些因素,我们可以建立一个更加准确和全面的动力学模型,以便进行系统的分析和优化。
除了建立动力学模型,我们还可以使用数值方法来模拟和分析具有摩擦的机械系统。
2025年高考物理总复习专题05 摩擦力的突变问题(附答案解析)

第1页(共18页)2025年高考物理总复习专题05摩擦
力的突变问题
模型归纳1.摩擦力的突变问题
四类突变图例分析“静—静”
突变
在水平力F 作用下物体静止于斜面上,F 突然增大时物体仍保持静止,则物体所受静摩擦力的大小或方向将“突变”“静—动”突变物体放在粗糙水平面上,作用在物体上的水平力F 从零逐渐增大,当物体开始滑动时,物体受水平面的摩擦力由静摩擦力“突
变”为滑动摩擦力
“动—静”
突变
滑块以v 0冲上斜面做减速运动,当到达某位置时速度减为零而后静止在斜面上,滑动摩擦力“突变”为静摩擦力。
摩擦力的数学模型及计算方法摩擦力经典试题与讲解

摩擦力的数学模型及计算方法摩擦力经典试题与讲解摩擦力是我们生活中非常重要的一种力,它影响着许多我们生活中涉及到的东西,例如滑雪、车辆行驶以及机器等。
本文将介绍一些摩擦力的数学模型与计算方法,并对一些摩擦力经典试题进行解析。
1. 摩擦力的数学模型首先,我们需要了解在无外力作用下,物体间存在两种不同的摩擦力,分别是静摩擦力和动摩擦力。
当物体在静止时,外力作用于物体的方向与摩擦力方向相反,并等于外力的大小。
而当物体处于运动状态时,摩擦力的大小与方向依赖于物体间的相对速度。
在静摩擦力的模型中,我们可以使用以下公式来计算两个物体间的最大静摩擦力:F_s<=u_s*F_n其中,F_s为静摩擦力最大值,u_s为静摩擦系数,F_n为两个物体间的法向力。
而在动摩擦力的模型中,我们可以使用以下公式来计算两个物体间的摩擦力:F_d=u_d*F_n其中,F_d为动摩擦力的大小,u_d为动摩擦系数,F_n为两个物体间的法向力。
2. 摩擦力的计算方法在实际应用中,我们需要根据具体的情况来计算摩擦力。
例如,我们可以通过以下步骤来计算一个斜面上物体的摩擦力:步骤1:计算物体在斜面上受到的力的分量力分解是一个非常常见的计算手段,在这个例子中,我们需要计算物体所受的重力在斜面上的分量,以及静摩擦力与动摩擦力在斜面上的分量。
步骤2:根据静摩擦力和动摩擦力的大小来确定实际摩擦力根据上述数学模型,我们可以计算出静摩擦力和动摩擦力的大小,这可以帮助我们确定物体在斜面上的实际摩擦力。
步骤3:计算物体在斜面上的加速度最后,我们可以使用牛顿第二定律来计算物体在斜面上的加速度,即:a=(F_g*sinθ-F_s)/m其中,F_g为物体所受到的重力,θ为斜面的角度,F_s为物体所受到的摩擦力,m为物体的质量。
3. 摩擦力经典试题的解析下面我们将介绍两个常见的摩擦力经典试题及其解析。
试题1:一个质量为m的物块放置在一个光滑的斜面上,斜面的倾角为θ,已知物块受到的外力F作用于斜面上,求当F逐渐增大时,物块开始向下滑动的外力大小。
多体问题中的摩擦力与基本方程求解
多体问题中的摩擦力与基本方程求解多体问题是物理学中重要的研究对象之一,研究多个物体之间的相互作用与运动规律。
在研究多体问题时,摩擦力是一个不可忽略的因素。
本文将从多体问题中的摩擦力入手,探讨其对基本方程求解的影响。
首先,我们对多体问题中的摩擦力进行简要介绍。
摩擦力是由物体表面接触处相对滑动产生的一种阻碍运动的力。
在多体问题中,摩擦力的存在会导致物体之间的相对运动发生改变,进而影响到整个系统的动力学行为。
摩擦力的大小与物体表面的粗糙程度、接触面积以及所受力的大小等因素相关。
常见的摩擦力模型有Coulomb摩擦模型和Viscous摩擦模型。
Coulomb摩擦模型认为摩擦力与物体之间的压力成正比,且存在摩擦系数。
Viscous摩擦模型则假设摩擦力与速度成正比,与Coulomb摩擦模型相比,Viscous摩擦模型更适用于速度较高的情况。
在多体问题的求解中,摩擦力的考虑是必不可少的。
通过考虑摩擦力,我们可以更准确地描述物体之间的相互作用,得到更真实的系统运动规律。
然而,由于摩擦力的非线性和复杂性,基本方程的求解变得更加困难。
在求解多体问题时,通常会采用数值方法。
最常用的数值方法之一是Euler法。
该方法基于牛顿第二定律,通过离散化时间和空间,将连续的物理过程分解为一系列离散的时间步骤,从而得到物体的数值解。
然而,当考虑到摩擦力时,Euler法的精度会受到较大影响。
为了解决摩擦力对基本方程求解的影响,可以采用更高阶的数值方法。
一种常用的方法是改进的Euler法,即改进的欧拉-克罗贝克法(Euler-Cromer method)。
在该方法中,先根据物体当前的速度和加速度,计算下一个时刻的速度,再基于新的速度计算下一个时刻的位置。
通过这种方式,可以更准确地模拟物体的运动轨迹。
除了数值方法,还可以采用20世纪末提出的更高级的算法,如Runge-Kutta法。
利用多个阶段的计算,该方法可以更准确地估计物体的运动状态,从而得到更精确的解。
物体的摩擦力与滑动摩擦的数学计算

滑动摩擦力与 加速度的关系 在实际生活中 的应用:例如 汽车启动、刹
车等场景
PART 05
滑动摩擦力在生 活中的应用
车辆制动系统
滑动摩擦力在车辆制动系统中的应用
制动器:利用滑动摩擦力使车轮减速
制动盘:与制动器配合,产生滑动摩 擦力
制动片:与制动盘接触,产生滑动摩 擦力
制动液:传递制动力,使制动器产生 滑动摩擦力
物体的摩擦力与 滑动Leabharlann 擦的数学 计算汇报人:XX
目 录
01 摩 擦 力 的 定 义
03
物体间的摩擦力 计算
05
滑动摩擦力在生 活中的应用
02
滑动摩擦的数学 模型
04
滑动摩擦力与运 动状态的关系
PART 01 摩擦力的定义
摩擦力的概念
摩擦力:两个物体接触 时,由于接触面的粗糙 度和压力等因素,产生 的阻碍相对运动的力。
滑动摩擦系数的 应用:在工程设 计中,滑动摩擦 系数的计算可以 帮助我们更好地 理解和优化物体 的运动和受力情 况。
滑动摩擦系数的物理意义
滑动摩擦系数是衡量物体之间滑 动摩擦力大小的参数
滑动摩擦系数是物理学中的一个 重要概念,用于描述物体之间的 滑动摩擦行为
添加标题
添加标题
添加标题
添加标题
滑动摩擦系数与物体表面的粗糙 度和接触压力有关
静摩擦力的方向: 与物体相对运动趋 势相反,总是阻碍 物体的相对运动
动摩擦力的计算
定义:两个接触面间存在相对运动时产生的阻力 公式:f=μN,其中f为动摩擦力,μ为动摩擦系数,N为正压力 影响因素:动摩擦系数与接触面的材料、粗糙度有关,正压力与接触面间的压力有关 应用场景:在工程、物理学等领域中广泛应用的物理概念
摩擦力 参数辨识模型
摩擦力参数辨识模型标题:摩擦力的参数辨识模型导言:摩擦力是物体相互接触时产生的一种阻力,对于许多工程和科学应用来说都具有重要的意义。
本文将介绍摩擦力的参数辨识模型,通过研究和实验,我们可以准确地推测和计算摩擦力的大小和特性。
1. 摩擦力的定义与分类摩擦力是物体之间相对运动时产生的阻碍力。
根据物体之间的接触方式和性质,摩擦力可以分为静摩擦力和动摩擦力。
静摩擦力是物体相对静止时所受到的阻力,而动摩擦力则是物体相对运动时所受到的阻力。
2. 摩擦力的影响因素摩擦力的大小受到多种因素的影响,包括物体之间的表面粗糙度、压力、接触面积和润滑程度等。
这些因素的变化会导致摩擦力的大小和特性发生变化。
3. 摩擦力的参数辨识模型为了准确地描述和计算摩擦力,研究者提出了参数辨识模型。
这个模型基于实验数据和数学方法,通过建立物体之间的力学模型来推测和计算摩擦力的大小和特性。
参数辨识模型可以帮助我们更好地理解和应用摩擦力。
4. 摩擦力的应用摩擦力在许多领域都有着广泛的应用。
例如,在机械工程中,摩擦力的准确计算可以帮助设计师选择合适的材料和润滑方式。
在交通工程中,摩擦力的研究可以提高车辆的行驶安全性。
此外,摩擦力还在摩擦制动器、摩擦离合器和摩擦传动等系统中发挥重要作用。
结论:摩擦力的参数辨识模型是研究摩擦力的重要工具,通过对物体之间的力学模型的建立和实验数据的分析,我们可以准确地推测和计算摩擦力的大小和特性。
摩擦力的研究对于改进工程设计和提高系统性能具有重要意义,同时也对于我们更好地理解和控制物体之间的相对运动具有重要的启示作用。
通过不断深入研究和实验,我们可以进一步完善摩擦力的参数辨识模型,为实际应用提供更加精确和可靠的参考依据。
摩擦力模型综述
1.引言摩擦是一种复杂的非线性物理现象,产生于具有相对运动的接触面之间。
因此,摩擦发生在所有的机械系统中,并对机械系统的性能有着较大的影响。
由于摩擦的高度非线性特新,摩擦往往会导致系统的稳态偏差,极限环或者降低系统的性能指标。
所以对于控制领域而言了解摩擦是非常有必要的,这样才能明白摩擦对于闭环回路的影响并且设计控制器来降低这种影响。
目前已经建立的摩擦力模型多大几十种,他们各有千秋,充分了解和分析这些模型的结构、机理和使用范围对于解决机械系统与摩擦有关的力学问题和摩擦补偿问题有着重要的意义。
2.摩擦现象摩擦是两个接触表面间产生的切向作用力。
众多试验表明摩擦与许多因素有关,例如相对滑动速度、相对加速度、位移、润滑情况和接触表面状况等。
大量的学者用了无数的实验来揭示摩擦特性,对于摩擦力的精确建模需要对摩擦现象深入的了解。
下面便来介绍接种主要的摩擦现象。
2.1.库伦摩擦库伦摩擦是非零下的摩擦,也称运动摩擦。
库伦摩擦独立于接触面积,预法向载荷成正比,预运动状态方向,而与运动速度的幅值无关。
2.2.粘滞摩擦粘滞摩擦力来源于接触表面间流体润滑层的粘滞性行为,该力与速度呈比例关系,并且当速度为0时,其值也为0。
2.3.静摩擦力静摩擦力是物体从静止开始产生相对运动所需要的力。
静摩擦力的大小不依赖于相对速度,与外力的大小有关。
一般来说,静摩擦力邀大于库伦摩擦力。
2.4.Stribeck摩擦Stribeck摩擦也成为Stribeck效应,用来描述低速区的摩擦力行为。
Stribeck摩擦力是稳态速度的函数。
在相对速度较低的范围内,随着相对速度的增加摩擦力反而下降,如图1所示曲线负斜率部分。
图2.1 Stribeck 效应2.5.预滑动位移两个物体相互接触,当施加的外力小于最大静摩擦力的时候,接触表面上的粗糙峰会产生微小的位移,成为预滑动位移,又称Dahl 效应,在预滑动阶段,粗早峰的变形行为类似于弹簧,摩擦力是位移的函数而不是速度的函数。
lammps 摩擦力计算
lammps 摩擦力计算
LAMMPS是一种用于分子动力学模拟的软件,可用于计算物质的各种性质,包括摩擦力。
摩擦力是两个物体相对运动时产生的阻力,它在许多领域中都是一个重要的参数,如材料科学、化学、机械工程等等。
LAMMPS提供了多种方法来计算摩擦力,其中最常见的是使用fix 命令。
fix命令是LAMMPS中的一个命令,用于对模拟进行控制和修改。
使用fix命令,可以选择不同的摩擦模型来计算摩擦力。
常见的模型包括Lennard-Jones模型、Morse模型、EAM模型等等。
在使用LAMMPS计算摩擦力时,需要设置一些参数,如摩擦系数、初始速度、温度等等。
除此之外,还需要选择合适的模拟时间和计算方法,以保证计算结果的准确性和可靠性。
总之,LAMMPS是一种非常强大的分子动力学模拟软件,可用于计算物质的多种性质,其中包括摩擦力。
在使用LAMMPS进行摩擦力计算时,需要选择合适的模型和参数,并进行合理的模拟设置,以获得准确可靠的计算结果。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《摩擦力》习题课
核心观念:相对运动和相对运动趋势
1、摩擦力产生的条件:接触面粗糙;有弹力;有相对运动或相对运动趋势
2、 静摩擦力和滑动摩擦力中的“静”和“动”都是相对的,并不是相对地面(静 止参考系)都是“静”或“动”的。
当摩擦力的前 2个条件都满足时,关键是判 断两物体间有没有相对运动或相对运动趋势。
第一点:两个相对静止的物体间发生相对运动趋势就有静摩擦力,但这两个物体可以 相对地面在运动。
(运动的物体也会产生静摩擦力 )
【举例】手里握住一个物体让其水平运动。
这时物体受到受对其施加的竖直向上的静
摩擦力作用,但物体相对地面是在运动的。
而且,这时的摩擦力方向和运动方向是垂直的。
第二点:两个相对运动的物体间就会有滑动摩擦力,但这两个物体中可以有相对地面 静止的物体。
(静止的物体也会产生滑动摩擦力 )
【举例】粉笔和黑板之间的滑动摩擦留下了字迹。
这时黑板和粉笔受到的都是滑动摩 擦力,但黑板相
对地面是静止的。
3、 摩擦力的方向不一定和物体运动方向相反。
(摩擦力的方向与物体运动的方向 可以相反、相同、垂直。
)摩擦力可以是阻力,也可能是动力。
【举例】 如图所示,物体 A 随传送带一起运动,当传送带分别处于下列运动状态时, 试画出物块A
的受力示意图。
中A 与传送带发生了相对滑动,相对传送带向左运动,因此受到向右的摩擦力。
图 4中A
相对传送带向右运动,因此受到向左的摩擦力。
如下图:
4、摩擦力大小的求解要分清是何种摩擦力。
对于静摩擦力的大小没有固定的公 式,只能根据力的平衡原理进行求解, 常根据需要发生变化;而滑动摩擦力的大 小有公式f= uF ,它与正压力成正比。
【举例】 一个重为100N 的木箱放在地面上,两者间的的动摩擦因数为
0.2。
现在分别
用5N 、8N 、20N 、25N 的水平力推这一物体,问物体受到的摩擦力分别为多大?(木箱的 最大静摩擦力等于滑动摩擦力)
【解析】由题意知,木箱发生相对滑动的最大静摩擦力为
f max = F =0.2 X 00N=20N o
当F=5N 时,推力小于f max ,故木箱保持静止,受到静摩擦力
f=F=5N ;当F=8N
时,木箱
分析:图1中A 与传送带一起匀速向上, 的运动趋势,因此,A 受到斜向上的静摩擦力。
者没有发生相对运动和相对运动趋势,因此,
图3
图4
A 相对传送带静止,但 A 相对传送带有向下 图 2中A 与传送带一起水平匀速运动,两 A 没有收到摩擦力力,尽管
A 在运动。
图3
水平加速 水平减速
仍保持静止,受到静摩擦力f=F=8N ;当F=20N时,正好等于最大静摩擦力,故木箱发生滑动,因此受到滑动摩擦力f=20N ;当F=25N时,推力大于最大静摩擦力,木箱水平滑动, 因此f=20N。
【拓展】当木箱受到的外力不是水平的,而是斜向下推或斜向上拉的时候。
若运用公式f max=^F 时,F N就不再等于G=100N,而是要根据实际情况分析。
5、多个物体间的摩擦力分析。
通常要根据多个物体的运动状态,利用力的平衡原理,从整体和部分的角度进行分析。
【举例】如图所示,三个物体A、B、C叠放在一起,现施加一个力B、C仍静
止,则关于A、B、C所受摩擦力,下列说法正确的是:(
A . A受一个摩擦力
B . B受一个摩擦力
C. A不受摩擦力
D . C受一个摩擦力
【解析】此题的关键是A所受摩擦力的判断可由物体的平衡条件判断,由于A静止,
所受合力为零,竖直方向上的重力与支持力合力为零,则水平方向不受摩擦力作用(即A、B间不存在相对运动趋势)。
B所受合力为零,则B受到C给B的一个静摩擦力,而C物体必定受到两个摩擦力,分别为B和地面施加的。
故选BC项。
【举例】两块木板之间夹着3块相同的砖块,重量为G,砖块保持静止,分析三砖块的受力情况。
【解析】首先我们分析得到,三块砖都保持静止,因此要受到摩擦力也是静摩擦力。
其次对三块砖进行整体分析,如上图。
得到两块木板给1、3两块砖的摩擦力为f=3G/2。
再
对1、2、3块砖进行隔离分析,如上图。
6自行车的推动和滚动,人走路,皮带与轮的传动装置等情境中的摩擦力分析。
转动方车前进方向车推动方向
f/。