数码相机定位研究
数码相机的调查报告
数码相机的调查报告篇一:数码相机市场调查报告艾尼森数码相机市场调查报告如今拍照已经成为伴随我们日常生活的一件极为平常的事情,每当有大事,有美景,有聚会的时候,人们都会拿出各式各样的拍照器材来,而数码相机无疑是其中的主体。
为了了解华东地区数码相机消费者的消费倾向,把握数码相机市场消费者的消费特征和需求,我公司对华东地区部分消费者投放了1000份数码相机市场调查问卷,通过将数码相机市场消费者这个群体进行细分,分为各个细分市场进行调查,主要根据性别,收入,学历,所处地区,职业职位,来进行某类特征消费者对数码相机某属性的偏好的调查,调查结果如下:一、调查目的1.了解各个相机品牌的市场份额和市场地位。
2.了解数码相机市场的主要客户群,挖掘潜在消费者。
3.消费者选择相机的动机。
4.消费者购买相机的主要用途。
二、调查分析1.宏观环境分析XX年以来,随着全球经济发展和人们生活水平的提高,照相器材在总体上主要呈现以下发展趋势:从全球来说,应人们文化生活不断提升的要求和人们追求休闲化趋势及数字信息技术带给人们越来越多的方便,照相机已成为人们日常生活中必不可少的一个“家用电器”,并且照相机与PC或电视机之间将逐渐实现信息互换。
目前数码相机已经可以直接与其他电器链接,传统相机则可通过扫描仪等输入设备进行转化。
照相机正由传统相机向数码相机发展。
同时传统相机还将在长期内在专业领域具有相当广阔的市场,虽然最终必将会被数码相机完全取代而进入博物馆,但二者在长期内还将共生共存。
无论是传统相机还是数码相机,其价格将不断下降。
数码相机由于目前用户主要是商业用户,民用用户由于价格的限制其市场尚未完全启动,因此价格下降是不可避免的趋势;传统相机数十年来价格总体上就呈下降趋势,由于数码相机的冲击,其价格下降将会更快。
目前,中国已成为全球最大的数码相机产地,已经成为世界上最大的数码相机消费市场。
XX年数码相机出口1.09亿台、出口额70.7亿美元,增长12%。
数码相机方案
5.市场推广:制定营销策略,开展线上线下推广活动。
6.售后服务:建立完善的售后服务体系,提高用户满意度。
五、风险评估与应对措施
1.技术风险:跟踪行业技术动态,及时更新技术,确保产品竞争力。
2.市场风险:密切关注市场变化,调整产品策略,降低市场风险。
2.技术参数
(1)像素:根据市场需求,设定合理的像素范围,确保图像清晰。
(2)传感器:采用高品质传感器,提高感光性能,降低噪点。
(3)镜头:选用优质镜头,保证画面质量,提供丰富的拍摄场景。
(4)屏幕:采用高清、高亮度、广视角的屏幕,提升用户体验。
(5)存储:提供多种存储方案,满足不同用户需求。
(6)电池:选用高容量、长寿命的电池,保证续航能力。
-与零售商、电商平台合作,扩大销售渠道。
4.售后服务
-设立专业的客户服务团队,提供快速响应的售后服务。
-建立用户反馈机制,持续改进产品,提升用户满意度。
五、风险控制
1.技术风险:跟踪技术发展动态,及时更新技术方案,保持产品技术领先。
2.市场风险:定期进行市场分析,灵活调整市场策略,降低市场不确定性。
5.营销策略
(1)线上线下同步发力,拓展销售渠道。
(2)开展丰富多样的促销活动,吸引消费者关注。
(3)加强售后服务,提高用户满意度。
四、实施步骤
1.市场调研:深入了解市场需求、竞争态势,为产品设计提供依据。
2.产品研发:根据设计方案,组织研发团队进行产品开发。
3.生产线搭建:建立高效、稳定的生产线,确保产品质量。
三、方案设计
1.产品规格
-图像传感器:选用高分辨率、低噪点的传感器,确保在各种光照条件下都能获得优质图片。
数码相机市场细分及定位
现在的数码相机市场存在着严重的同质化现象,产品的功能因素在消费者的购买决策中占的比例越来越小,人们更多的是追求产品的个性化,体现在消费上就是追求符合自己品位的品牌、设计,消费者的心理需求成为数码相机厂商营销发展的最大内在驱动力。
不同人群对品牌、功能、外观、价位都有不同的选择,求全、求大、一锅端已经不能适应市场变化的要求。
找准不同消费群体的心理需求,开发并满足多元化的细分市场,才是数码相机品牌的发展之道。
一、市场细分(Segmentation)。
市场细分的标准有地理因素、人口因素、心里因素、行为因素。
本公司根据数码相机调查报告,按人口因素和行为因素将消费市场进行了一下划分。
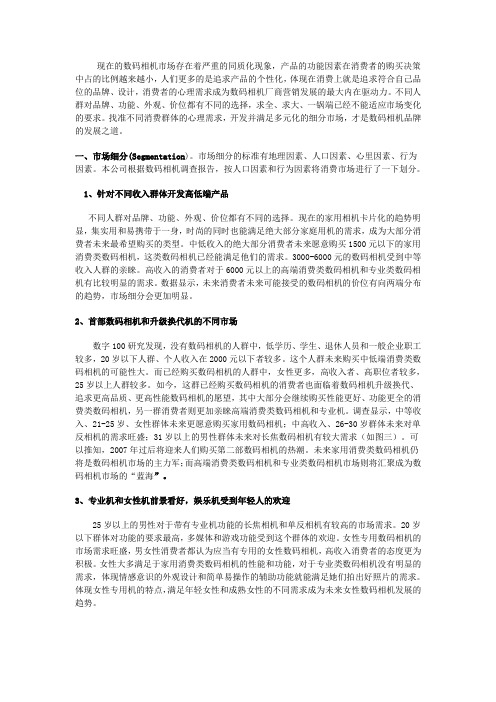
1、针对不同收入群体开发高低端产品不同人群对品牌、功能、外观、价位都有不同的选择。
现在的家用相机卡片化的趋势明显,集实用和易携带于一身,时尚的同时也能满足绝大部分家庭用机的需求,成为大部分消费者未来最希望购买的类型。
中低收入的绝大部分消费者未来愿意购买1500元以下的家用消费类数码相机,这类数码相机已经能满足他们的需求。
3000-6000元的数码相机受到中等收入人群的亲睐。
高收入的消费者对于6000元以上的高端消费类数码相机和专业类数码相机有比较明显的需求。
数据显示,未来消费者未来可能接受的数码相机的价位有向两端分布的趋势,市场细分会更加明显。
2、首部数码相机和升级换代机的不同市场数字100研究发现,没有数码相机的人群中,低学历、学生、退休人员和一般企业职工较多,20岁以下人群、个人收入在2000元以下者较多。
这个人群未来购买中低端消费类数码相机的可能性大。
而已经购买数码相机的人群中,女性更多,高收入者、高职位者较多,25岁以上人群较多。
如今,这群已经购买数码相机的消费者也面临着数码相机升级换代、追求更高品质、更高性能数码相机的愿望,其中大部分会继续购买性能更好、功能更全的消费类数码相机,另一群消费者则更加亲睐高端消费类数码相机和专业机。
数码相机标定的相关参数计算
照相机的镜头并非理想的光学系统,像平面上的实际成像点与理想 成像点之间存在着光学畸变误差。在通常情况下,采用的畸变模型只考 虑径向畸变,有畸变后的坐标与畸变前的坐标的变化关系为:
( ) ⎪⎧X '= X 1 + kr 2 ( ) ⎪⎩⎨Y '= Y 1 + kr 2
其中, r 2 = X 2 + Y 2 , k 为畸变系数。可知 r 越大,畸变程度就越大。也 就是,离镜头中心的距离越远,所成的像与原物之间的畸变就越大。
了靶标圆所在平面,即此时ϕ,θ 取值下的平面α ' 与平面α 为同一平面。在通过焦 点坐标,焦距值即可求出圆像圆心的精确位置。 2. 模型相关解释及说明:
2.1 在取定点 O 时,出于处理方便,在不影响计算结果的情况下,我们取定 x0 = 0, y0 = 0, z0 = −r ,由已知,可得 r = 12mm 。
在本模型中,应该对于模拟图像的边界进行搜索,而在数码相机的数 模转换之后,我们搜索的对象只是各个网格的中心,这就会导致搜索过程 中找到的圆心与理想模拟搜索到的圆心有差距,进而影响模型的精确程度。 而且,在模型中,我们是逆推相机的成像原理,是对所成的数字化以后的 像反推得到原物,数字化导致的误差在逆推过程中,会随着原物与镜头距 离的增大而增大。从而导致对圆的判断和圆心位置的确定产生影响。
对与本模型而言,如果像圆离镜头的中心很大,那么像圆与原物圆 的差距就很大,而在模型求解过程,我们是基于像素对面上的进行搜索, 如果,由于畸变使某些点的坐标与理想情况差距较大,就会直接导致搜 索不到最准确的圆心,影响模型的稳定性。
z 分辨率
镜头的分辨率,通俗的可以做以下理解:我们在镜头的像平面上以 相同的间隔分别在横向和径向画网格,将像平面分成很多的区域,而我 们搜索的对象就是网格的中心。
数码相机的调查报告

数码相机的调查报告数码相机的调查报告一、引言数码相机是一种将图像转化为数字信号的摄影设备,随着科技的不断进步,数码相机在我们的日常生活中扮演着越来越重要的角色。
本次调查旨在了解数码相机的使用情况、用户需求以及市场趋势,为相关行业提供参考和指导。
二、市场概况目前,数码相机市场呈现出多样化的发展趋势。
随着智能手机的普及,一部分消费者开始放弃传统数码相机,转而使用手机进行拍摄。
然而,仍有一部分用户对数码相机有着较高的需求,尤其是专业摄影师和摄影爱好者。
三、用户需求调查1. 使用目的通过对100名数码相机用户的调查发现,他们使用数码相机的主要目的包括旅行摄影(40%)、人像摄影(25%)、风景摄影(20%)、纪实摄影(10%)以及其他摄影领域(5%)。
2. 用户喜好在数码相机的选购过程中,用户最看重的因素是画质(30%)、便携性(25%)、功能(20%)、价格(15%)以及品牌(10%)。
这表明用户对于相机的画质和便携性有着较高的要求。
3. 使用频率大部分用户(60%)表示每周使用数码相机进行拍摄,其中有20%的用户每天都会使用。
另外,有30%的用户表示每月使用一次或者更少。
四、数码相机品牌调查1. 市场份额通过对数码相机市场的调查,我们发现佳能(Canon)和尼康(Nikon)是市场份额最大的两个品牌,分别占据了45%和30%的市场份额。
其他品牌如索尼(Sony)、富士(Fujifilm)和奥林巴斯(Olympus)等则分别占据了10%的市场份额。
2. 用户满意度在用户满意度方面,佳能和尼康再次脱颖而出。
根据调查结果,有60%的用户对佳能和尼康的产品表示满意,其中有20%的用户非常满意。
其他品牌的用户满意度相对较低,仅有40%的用户表示满意。
五、市场趋势展望1. 全画幅相机的崛起随着科技的进步,全画幅相机在近年来逐渐受到市场的关注。
全画幅相机具有更大的感光元件,能够提供更高的画质和更好的低光性能,因此备受专业摄影师的青睐。
数码相机定位2
数码相机定位摘要柯达于1975年开发世界第一部数码相机。
由此,数码照相机便家喻户晓起来。
数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
标定的一种做法是:在一块平板上画若干个点,同时用这两部相机照相,分别得到这些点在它们像平面上的像点,利用这两组像点的几何关系就可以得到这两部相机的相对位置。
然而,无论在物平面或像平面上我们都无法直接得到没有几何尺寸的“点”。
实际的做法是在物平面上画若干个圆(称为靶标),它们的圆心就是几何的点了。
而它们的像一般会变形,所以必须从靶标上的这些圆的像中把圆心的像精确地找到,标定就可实现。
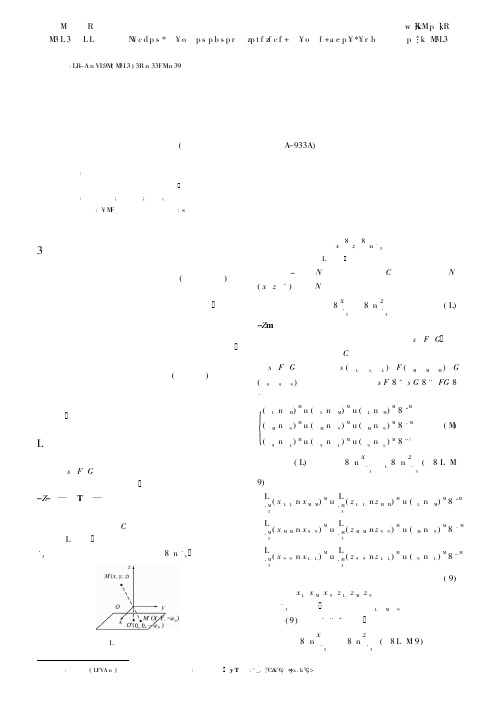
大连海洋大学理学院信息与计算科学10—1李莹1007110107关键词:针孔成像,坐标变换,图像处理,相机镜头畸变,双目定位。
一、问题的提出与重述1.数码相机监视系统是由:景点(scene)方位、相机参数以及方位、成像参数部分组成的系统,系统的标定就是要确定系统各部分的相互关系(主要是几何、数量关系),系统的参数主要有两部分:1)相机的内参数:用于描述相机本身特定属性的参数以及在空间中定位的参数,2)相机的外参数:是指相机相对与世界坐标系(用于公共参考的坐标系)的位置关系,主要由相机坐标系到世界坐标系的变换(平移、旋转)来描述。
确定了相机的内参数和外参数,系统就标定成功。
2.图示u --------景点在像平面中的像;uOC ----------------主光轴(相机坐标系Z轴)上的点在像平面的像点(殴氏坐标);u0a--------主光轴(相机坐标系Z轴)上的点在像平面的像点(仿射坐标);3. 坐标系统Ow XwYwZw ------------ 世界坐标系O c XcYcZc -------------- 相机坐标系O i XiYiZi --------------- 像欧氏坐标系O a XaYaZa ---------------像仿射坐标系[注:世界坐标系是系统的一个客观的参考系;相机坐标系原点在相机光心(焦点);像的欧氏坐标系与相机坐标系的关系是:Z轴平行且同向,X-Y面平行;像仿射坐标系与像欧氏坐标系关系密切,Z轴,Y轴平行,X轴有个倾斜,主要考虑是,像素的方快长和宽可以不等,而且,视觉效果上可能会出现倾斜情况]。
一种数码相机定位方法的分析与研究
同时 用这两部 相机照 栩 , 分别 得 到这 些 点 在 它们 像平 而上的像点 , 利用这两组像点 的J何关系就可 以得到 L
这两 部相 机的相财 位置 。然 而 , 无论 在 物 平 面或 像平
8=
,c ; y 3 0d
,x, 神 (0y
A。ep c + X X [ l o+ y o
域有重 要应用 。
1 数码 相 机 双 目定位 法
c A 2 2 ,, ; 一 一 = 菱 未X o
B是 一个 N×5矩 阵 , 第 i 为 [ i 其 行 b]=[if i f,x, i
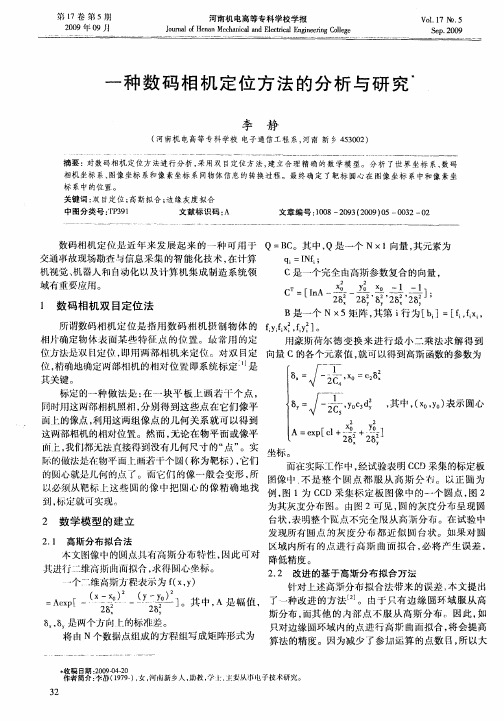
所谓数码 相 机 定 位 是 指 用 数码 相 机 摄 制 物 体 的 £ ix , y ] y f 。 i 相 片确定 物体 表 面 某 些特 征 点 的位 置 。蚊 常 用 的定 用豪斯 荷 尔德 变换 来 进 行 最 小 定 位 是近 年来 发 展 起 来 的一 种 可 用 于 Q= C。其 中, B Q是 一个 N×1向量 , 其元素 为 交通事故 现场勘查 与信 息采 集 的智 能化 技 术 , 计 算 在 q = Ni i I f; 机视 觉 、 机器人 和 自动 化 以及 计算 机 集 成 制造 系统 领 C是 一个 完全 由高斯 参 数复合 的 向量 ,
第 l 7卷 第 5期 20 0 9年 0 9月
河南机电高等专科学校 学报
Ju l f t n n Me h ncl n l tc l n ie r g C l g o ma e a c a i dE e r a E g ei o e e ot aa ci n n l
相机 坐标 系、 图像 坐标 系和像 素坐标 系间物体信息 的转换过程。最终确定 了靶标 圆心在 图像 坐标 系中和像 素坐 标系中的位置。 关键词 : 目定位 ; 双 高斯拟合 ; 缘灰度拟合 边 中图分类号 :P 9 T 31 文献标识码 : A 文章编号 :0 8— 0 3 20 )5— 02— 2 10 29 (0 9 0 0 3 0
基于几何映射关系的数码相机定位模型的研究

第 4 卷 O
M A a k i TAN x n DONG a y a e 1 Yu n u , Ii i g, Yu n u n, t a .Re e r h s ac
B 一
~
△ . △ △ z △ 一 z , l
J
+ 缸 棚l
() 1 2
o i t a r cl rt n J . ueadA pi te t n g a c a a bai [ ] P r n p ldMahma d P l me i o i e —
1 本文采用相机定标研究的基本模 型一 针孔模 型。
2 2 1 图像 坐 标 系 ..
0 .
相机采集 的数字 图像 在
l l
l ! I
.
计算机内可以存储为数组, 数组中的每一个像素值即是
就是几何的点)并 用相机对 其照相 , 后利用 靶标 上这些 , 然 圆的像 的坐标得 到圆心 的像 的坐标 , 利用透 镜成像原理 , 建
标 ( u 弘,)相 比的平均值 : X
( ‰
. .
[]陈琳, 6 陈祥 , 段晓威 , 双 目定位在数码相 机 图像标定 中的应 等.
用[]计算机与数字工程 ,09 3 (2 :5— 5. J. 20 ,7 1 )1 517
is 2 l , 7 5 : 0 — 1 c , 0 2 ( ) 7 5 7 O. 1 1 】
C — z r Ay 一 z Ay  ̄o  ̄ J x ̄ o
[] 文涛 , 3李 马钺. 基于智能相机 的目标物体的定位 [] 控制工程 , J.
2 1 1 S1 : 0 7 . 01 , 8( ) 7 1
Trn fr t n[ ] Ju nlo h n h iUnv ri fE g— asomai J . o ra fS a g a o ies yo n i t
ccd定位原理

ccd定位原理CCD定位原理。
CCD(Charge-Coupled Device)是一种广泛应用于数码相机、摄像机、扫描仪等光学设备中的光电转换元件,它的定位原理是通过对光信号的转换和处理,实现对物体位置的精确定位。
CCD定位原理的核心在于光电转换和信号处理,下面将详细介绍CCD定位原理的工作原理和应用。
首先,CCD定位原理的工作原理是利用半导体材料对光信号的敏感性。
当光线照射到CCD芯片上时,光子会激发半导体中的电子,使得电子在半导体中产生电荷。
这些电荷会被储存在CCD芯片的像素单元中,并且可以根据不同的光强产生不同的电荷量。
通过控制CCD芯片的曝光时间和光敏度,可以实现对光信号的精确捕捉和转换。
其次,CCD定位原理还涉及到对光信号的处理和转换。
CCD芯片中的电荷会经过AD转换器转换成数字信号,然后通过信号处理电路进行处理和放大,最终输出成为数字图像信号。
在这个过程中,CCD芯片会根据光信号的强弱和位置产生不同的电荷量,通过对这些电荷的转换和处理,可以实现对物体位置的精确定位。
最后,CCD定位原理在实际应用中具有广泛的应用价值。
在数码相机和摄像机中,CCD芯片可以将光信号转换成数字图像信号,实现对物体位置和形态的精确定位和捕捉。
在工业自动化领域,CCD定位原理可以应用于机器视觉系统中,实现对产品位置和形态的精确定位和检测。
此外,CCD定位原理还可以应用于光学测量、医学影像等领域,为各种应用场景提供精准的定位和测量技术支持。
总之,CCD定位原理是一种基于光电转换和信号处理的定位技术,通过对光信号的精确捕捉和转换,实现对物体位置的精确定位。
在各种光学设备和自动化系统中具有广泛的应用价值,为现代科技和工业生产提供了重要的技术支持。
希望通过本文的介绍,可以更好地理解CCD定位原理的工作原理和应用,为相关领域的研究和应用提供参考和帮助。
数码相机定位的相关模型比较
2 2 切 线定 点 法 .
做 B、C的 2条 外 公 切 线 ,C 、C 为 其 在 圆 C 2
2 模 型的建立与求解
2 1 等 高线 法 .
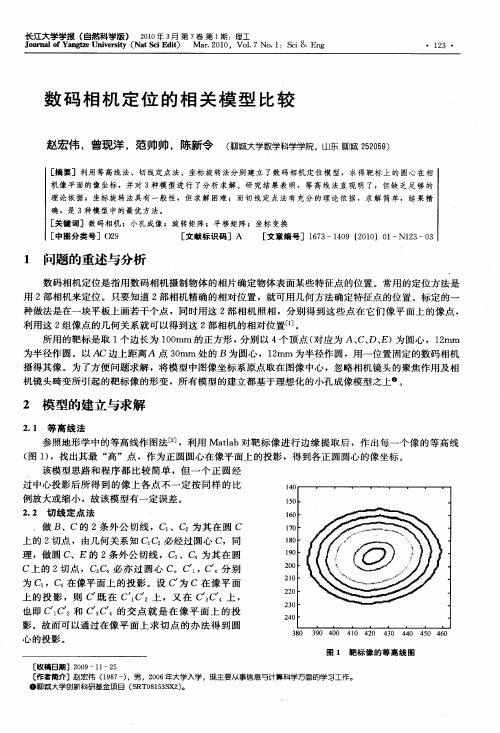
参 照地 形学 中的等 高线 作 图法 ,利 用 Malb对 靶标 像 进 行 边 缘 提 取 后 ,作 出 每一 个 像 的等 高线 t a ( 1 ,找 出其最 “ 图 ) 高” 点 ,作 为正 圆 圆心在 像 平 面上 的投 影 ,得 到各 正 圆圆心 的像 坐标 。
理 论 依 据 ;坐 标 旋 转 法 具 有 一 般 性 , 但 求 解 困 难 ;而 切 线 定 点 法 有 充 分 的 理 论 依 据 , 求 解 简 单 ,结 果 精 确 ,是 3种 模 型 中 的 最优 方 法 。
[ 关键词]数码 相机 ;小孔成像 ;旋 转矩阵 ;平移矩 阵;坐标 变换 [ 中图分类号]02 9 [ 文献标识码]A [ 文章 编号]1 7 6 3—10 (0 0 1 4 9 2 1 )0 一N1 3 3 2 —0
所用 的靶 标是 取 1 边长 为 1 0 个 0 mm 的正 方形 , 分别 以 4个 顶 点 ( 应 为 A、 D、 对 C、 E)为 圆心 ,1 mm 2 为半 径作 圆 。 以 A C边 上距 离 A 点 3 mm 处 的 B为 圆心 ,1 mm 为半 径 作 圆 ,用 一位 置 固定 的数 码相 机 0 2 摄 得 其像 。为 了方 便 问题 求解 ,将 模 型 中图像 坐 标 系原 点取 在 图像 中心 ,忽 略相 机镜 头 的聚 焦作 用及 相 机 镜 头畸 变所 引起 的靶 标像 的形 变 ,所 有 模 型 的建 立 都基 于理 想 化 的/  ̄ 成像 模 型之 上o。 JL ,
相机的调研报告
相机的调研报告相机调研报告一、引言相机是人们用来记录瞬间美好时刻的工具。
随着科技的发展,相机的功能和性能也越来越强大。
本调研报告旨在对市场上常见的相机进行调研,并对其功能、性价比、用户评价等方面进行分析。
二、调研方法本次调研采用了问卷调查和市场调研相结合的方法。
首先,我们在社交媒体平台上发布了一份问卷调查,收集了用户对相机需求、使用体验以及对不同品牌相机的评价;然后,我们前往不同的电子数码产品购物中心,对不同品牌相机进行实地观察,并与销售员进行交流,了解相关市场信息。
三、调研结果1. 相机品牌据调研结果显示,市场上最受欢迎的相机品牌是佳能、尼康和索尼。
其中,佳能以其可靠的性能和稳定的质量受到消费者的青睐,尼康在高像素和专业领域有一定优势,索尼则以小巧、易于携带的特点受到年轻消费者的喜爱。
2. 相机类型根据调研数据显示,数码相机仍然是主流市场,尤其是高性能、高像素的数码单反相机。
同时,便携式数码相机和手机相机也受到了很大的关注和购买需求。
3. 功能需求调研数据显示,消费者对于相机的功能需求主要集中在以下几个方面:高像素、良好的画质、光学变焦、防抖功能、高速连拍和4K视频录制。
此外,一些消费者还对无人机相机、360度全景相机和无线传输功能有一定需求。
4. 用户评价根据调研问卷中的用户评价,用户对于相机的满意度较高。
大多数用户认为相机的质量和性能都能够满足自己的需求,而且使用起来也比较方便。
同时,一些用户也提到了对于相机功能进一步的改进,例如更快的自动对焦速度和更方便的操作界面。
5. 价格偏好在价格方面,消费者对于相机的价格敏感度较高。
调研数据显示,大多数消费者对于相机的价格在3000-8000元之间偏好,而高端相机价格在1.5万以上的消费者则比较少。
四、结论与建议通过本次调研,我们得出以下结论和建议:1. 佳能、尼康和索尼是相机市场上最受欢迎的品牌,应加强品牌宣传和市场推广;2. 数码相机仍然是主流市场,但随着手机相机的发展,应考虑开发与手机相机配套的附件和功能;3. 用户对相机的功能需求主要集中在高像素、高画质、防抖等方面,应持续改进产品性能;4. 用户对于相机的价格敏感度较高,应考虑在中低价位推出性价比更高的产品,同时也应不断提升高端产品的性能和品质;5. 经过市场调研,发现市场对于无人机相机、360度全景相机和无线传输功能有一定的需求,应适时推出相关产品。
数码相机点像坐标定位的数学模型
0
( 4) =
, 关于已知标靶得单相机地定位问题 本文作者 � � � 0 曾在文[ 1]中给出了专门 的讨论 � 但是, 以 往选定 � � � � � 其中 I 为标准正交矩阵�由于 1 = ( 1,1 , 1 ) 与 的是靶标上的四个显著点, 而且要求这四点必须构
2
( 2,2,2) 为同一向量在不同坐标系下的表示, 应有 � 2 [ 1 ] � 成平面矩形 可 许洪范 ( 1954 - ) , 男, 教授, 主要研究方向 : 基础数学 � E : x uh o n gf an @ y e ah .n et
{
第6期
许洪范等: 数码相机点 像坐标定位的数学模型
� 9 3�
� � � 可以计算出 1 ,1 , 至此, 靶标上特征点 各个显著点 ( 例如 A 点) 的坐标 , 设 A ( A ,A , A ) � 2, 2, 3 ,3 , � � � 的坐标已经明确了 平面 的法向量 在不同的坐标系中有不同 由此可知, 只选定三个特征点进行直视定位是 的坐标表示, 分别为 , , � � 完全可能的 � � 但是前提条件是标靶的类型已知 � � � 而且 1 = { 1 ,1 ,1 ) 和 2 = { 2, 2, 2} � 三特征点的相对位置已知 � 两坐标系可以建立如下关系 � 定理 2� 利用靶标三个显著点的像坐标可以确 � � � 定靶标的空间位置 � � � =I +
第 2卷第 6 期 20 1 0 年 1 1 月
J OURNA L
南 阳 理 工 学 院 学 报 O F N A N Y A N G IN S T IT U T E O F T EC H N O LO G Y
Vo l .2 N o .6 No v. 2 010
数码相机的风格和市场定位

时尚风格的数码相机在外观和设计上更加注重时尚感和便携性,通常采用较小的传感器和相对简单的功能,以降 低成本和重量。这类相机适合那些需要随时随地拍摄并分享到社交媒体的用户,它们易于使用且能够快速捕捉精 彩瞬间。
复古风格
总结词
复古风格的数码相机模仿传统的胶片相 机外观,同时具备现代数码相机的功能 ,适合喜欢经典外观和现代技术的用户 。
目的和意义
随着摄影技术的不断发展,数码相机已经成为人们记录生活、表达创意的重要工 具。
研究数码相机的风格和市场定位,有助于消费者更好地了解产品特点,选择适合 自己的相机,同时也有助于厂商明确市场定位,制定有效的营销策略。
02
数码相机的风格
专业风格
总结词
专业风格的数码相机通常具备高像素、大传感器和丰富的手动功能,适合专业摄影师和摄影爱好者。
VS
详细描述
复古风格的数码相机在外观上模仿传统的 胶片相机,同时结合现代数码相机的功能 和技术。这种设计风格吸引了许多喜欢经 典相机外观和摄影文化的用户。复古风格 的数码相机通常采用中档性能,既能满足 日常拍摄需求,又能提供一些高级功能。
运动风格
总结词
运动风格的数码相机具备高速连拍、防抖和耐候性等特点,适合拍摄运动和户外场景。
05
结论
总结
数码相机市场呈现多 样化风格,满足不同 用户需求。
用户选择相机时需考 虑自身需求、预算和 拍摄风格。
不同品牌和型号的相 机在性能、功能和外 观设计上有所差异。
对未来市场的展望
1
技术创新推动数码相机性能提升,如更高像素、 更快连拍速度和更先进的人工智能技术。
2
用户对便携性和易用性的需求增加,促使相机厂 商推出更多轻便、智能的相机产品。
数码摄影设备案例分析

数码摄影设备案例分析首先,本案例将介绍这款数码相机的产品特点。
这款相机具有高分辨率,快速的自动对焦系统,以及多种拍摄模式和滤镜效果等功能。
此外,该相机还具备轻便便携,长续航时间的特点。
所有这些功能都使得这款相机在市场中具有一定的竞争优势。
接下来,本案例将探讨这款数码相机的市场定位。
通过市场调研可以得知,这款相机主要面向年轻人群,他们对于摄影的需求不仅仅是拍照记录,还包括了分享和社交。
因此,这款相机的宣传重点是其高像素、丰富的滤镜和快速的拍摄速度,以及轻便的便携性。
这些特点都是吸引年轻消费者的重要因素。
最后,本案例将分析消费者的决策行为。
在购买数码相机时,消费者会考虑到价格、品牌、功能、外观等多方面因素。
对于这款数码相机来说,其竞争优势在于价格合理、品牌知名度高,功能丰富,外观时尚。
因此,这款相机吸引消费者的潜在因素很多,可以满足消费者的多样化需求。
总之,这款数码相机在市场中具有较强的竞争优势,并且定位准确,能够吸引到大量的目标消费者。
随着数码摄影设备市场的不断发展,这款相机有望在市场中获得更多的份额。
这款数码相机的市场定位非常适合当今追求时尚和极简生活方式的年轻消费者。
年轻一代对摄影的需求不仅仅是拿来记录生活,更重视摄影作品的美感和个性化。
他们追求高品质的影像和更具有创意的拍摄方式,同时享受摄影带来的社交互动。
这款数码相机正是针对这一特定消费群体开发的产品,满足他们对于高品质影像和个性化拍摄的需求。
在产品特点和市场定位促进下,这款数码相机在市场中具有巨大的竞争优势。
其高像素和快速对焦系统确保了出色的影像质量和拍摄效率,吸引了更多专业和业余摄影爱好者。
同时,多种拍摄模式和滤镜效果使得用户可以轻松实现各种创意拍摄需求,满足他们对于个性化摄影的追求。
此外,轻便便携且长续航时间的设计,符合当代年轻人的生活方式,让他们可以在任何时候、任何地方轻松记录生活中的美好瞬间。
针对消费者的决策行为,这款数码相机具备了多个吸引消费者的潜在因素。
摄影测量技术的定位原理

摄影测量技术的定位原理摄影测量技术的定位原理主要包括空间定位原理和相对定向原理。
空间定位原理是指通过相机的内外参数和地面控制点的坐标来实现影像在三维空间中的定位。
相对定向原理是指通过照相机的旋转角度和相对摄影测量的对象,确定不同摄影位置之间的几何变换关系。
空间定位原理是摄影测量的基本原理之一、摄影测量中的相机定位是指在摄影测量坐标系中确定相机光心的位置和相机旋转角度。
为了实现相机的空间定位,需要确定相机的内外参数。
相机的内参数包括焦距、主点位置和畸变参数等,可以通过摄影测量仪器的校准来确定。
相机的外参数包括相对摄影测量对象的相机旋转角度和相机位置,可以通过空间后方交会法或其他定向方法来求解。
相对定向原理是摄影测量的另一个重要原理。
相对定向是指在同一次摄影任务中,确定不同摄影位置之间的几何变换关系。
相对定向原理是通过测量同一目标从不同摄影位置的影像坐标,再根据几何关系求解不同摄影位置之间的旋转角度和平移向量。
常用的方法包括立体像对法、重叠影像法和空间后方交会法等。
其中,立体像对法是指在地面上找出对应的立体像点,通过立体像点之间的几何关系求解相对定向参数;重叠影像法是指通过测量不同摄影位置上的重叠影像之间的几何关系来求解相对定向参数;空间后方交会法是指通过已知相机位置和相机旋转角度,测量同一目标在不同摄影位置上的影像坐标,再利用空间后方交会法求解相对定向参数。
除了空间定位原理和相对定向原理,摄影测量技术的定位原理还包括地面控制点的建立和校正。
地面控制点是在拍摄现场或周围建立的具有已知坐标的点,用于确定影像在地面上的绝对位置和定位精度。
地面控制点的建立和校正一般通过全站仪或GPS测量方法进行。
总结起来,摄影测量技术的定位原理主要包括空间定位原理、相对定向原理和地面控制点的建立和校正。
这些原理基于几何学的原理和摄影测量的数学模型,通过测量照相机的内外参数、摄影位置和对象的影像坐标,来实现影像在三维空间中的定位。
尼康数码相机市场营销策划(二)2024

尼康数码相机市场营销策划(二)引言:尼康作为全球知名的数码相机制造商,市场营销策划对于其产品的推广和销售具有重要作用。
本文将在前一篇文章的基础上,继续探讨尼康数码相机的市场营销策划。
概述:本文将从产品定位、目标市场、竞争分析、市场推广和销售渠道五个大点阐述尼康数码相机的市场营销策划。
正文:1. 产品定位a. 确定目标用户群体:根据产品特性和功能,确定适合的目标用户群体。
b. 定义产品特点和差异化:凸显尼康数码相机的特点和与竞争对手的差异,使其在市场上具备竞争优势。
c. 建立品牌形象:通过产品的设计、包装和宣传等手段,树立尼康品牌形象,提高品牌忠诚度。
2. 目标市场a. 市场细分:将市场划分为不同的细分市场,便于针对不同群体进行更具针对性的营销活动。
b. 定义目标市场规模和需求:了解目标市场的规模和消费者需求,为产品销售和市场推广提供基础。
3. 竞争分析a. 竞争对手分析:对主要竞争对手进行深入研究和分析,了解其产品特点和市场份额。
b. 竞争优势:发掘尼康数码相机的竞争优势,如技术创新、品质保证等方面,以在市场竞争中脱颖而出。
4. 市场推广a. 宣传和广告:通过网络、电视媒体和平面广告等多种渠道进行产品宣传和广告,提高产品在市场中的知名度。
b. 促销活动:组织各种促销活动,如打折、赠品等,吸引消费者购买尼康数码相机。
c. 社交媒体营销:利用社交媒体平台,与消费者进行互动和沟通,增加产品的曝光度和用户参与度。
5. 销售渠道a. 零售渠道:与大型电子商务平台和实体店进行合作,确保产品在各个渠道得到充分展示和促销。
b. 线上销售:搭建在线商城,提供用户在线购买服务,方便用户随时随地购买尼康数码相机。
总结:通过对尼康数码相机市场营销策划的分析,可以看出,产品定位、目标市场、竞争分析、市场推广和销售渠道是实现尼康数码相机市场营销目标的重要组成部分。
尼康应关注产品特点和差异化、找准目标市场、提高竞争优势、积极开展市场推广和建立多元化的销售渠道,以在竞争激烈的数码相机市场中取得成功。
数码照相机的双目定位方法-论文
数码照相机的双目定位方法-论文数码照相机的双目定位方法数码相机定位方法是双目定位方法,双目定位能精确地确定两部相机相对位置,该方法只需在物体表面标定靶标,从靶标上把圆心的像精确地找到,标定就实现。
对物体上一个特征点,用两部固定于不同位置的相机拍摄物体的像,分别得到点在两部相机像平面的坐标。
确定靶标上圆心的像的坐标时,由于圆是椭圆的特例,从而用椭圆来处理更具有普遍性,但是椭圆的图象中心并不是椭圆中心所对应的像点,因此,我们建立坐标系,利用空间椭圆的透视变换,空间椭圆在照相机像平面上投影椭圆的中心坐标与空间椭圆中心的实际投影像点坐标的空间几何关系,再结合椭圆拟合法利用计算机编程求解出在照相机像平面上投影椭圆的中心坐标。
在确定两台照相机的相对位置时,首先分析简单的平视双目立体视觉的三维测量原理,再对两个照相机的摆放位置不做特殊要求时利用照相机的透视变换对模型进行分析,用两个相机定位是利用空间点在两照相机像面上的透视成像点坐标来求取空间点的三维坐标。
为了简化分析,设两台照相机水平放置,视觉系统的坐标原点为其中一台照相机的投影中心。
对模型检验时考虑到精度和稳定性对模型的影响,建立了双目定位系统精度模型,从系统结构参数对精度的影响和照相机焦距对精度的影响两方面进行了分析,检验结果符合预期目标。
最后用靶标的坐标得出了两部固定照相机的相对位置。
关键词:椭圆拟合;几何关系;透视投影变换;双目定位;非线性最小二乘,无约束化问题一问题的重述数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
摄像机定位原理

摄像机定位原理摄像机是一种通过光学成像技术捕捉图像的设备,摄像机定位原理是指利用摄像机获取目标物体的图像信息,并通过计算机图像处理技术对图像进行分析和处理,从而实现对目标物体在三维空间中的定位。
摄像机定位主要包括两个步骤:图像获取和图像处理。
图像获取是指通过摄像机采集目标物体的图像,而图像处理则是对采集到的图像进行处理和分析,得出目标物体的位置和姿态信息。
在图像获取过程中,摄像机首先通过透镜将目标物体的图像聚焦在图像传感器上。
图像传感器是摄像机中最关键的一部分,它能够将光信号转换为电信号,并将其转化为数字信号输出。
常用的图像传感器包括CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)传感器。
这两种传感器都有自己的优势和特点,可根据具体应用需求进行选择。
在图像处理过程中,首先需要对采集到的图像进行预处理,包括去噪、图像增强、边缘检测等。
接下来,利用计算机视觉技术对图像进行分析和特征提取,以获取目标物体的位置和姿态信息。
常用的图像处理算法包括特征点匹配、物体识别、运动目标跟踪等。
在摄像机定位中,常用的方法有单目视觉定位和立体视觉定位。
单目视觉定位是指利用单个摄像机获取图像信息进行定位,它通常依靠目标物体在图像中的特征进行定位,如边缘、角点等。
立体视觉定位则是利用两个或多个摄像机同时采集目标物体的图像,通过对图像进行立体匹配,可以得到目标物体的三维坐标。
除了图像处理技术,摄像机定位还可以结合其他传感器,如惯性导航系统(IMU)、全球定位系统(GPS)等,以提高定位精度和稳定性。
这些传感器可以提供额外的位置和姿态信息,与摄像机的图像信息进行融合,从而得到更准确的定位结果。
摄像机定位在许多领域都有广泛应用,如机器人导航、工业自动化、无人驾驶等。
通过摄像机定位技术,可以实现对目标物体的实时监测和定位,为各种应用场景提供精准的位置信息。
总结起来,摄像机定位原理是通过摄像机获取目标物体的图像信息,并利用图像处理技术对图像进行分析和处理,从而实现对目标物体在三维空间中的定位。
挑战杯大学生课外学术科技作品竞赛题目汇总

挑战杯⼤学⽣课外学术科技作品竞赛题⽬汇总第五届挑战杯⼤学⽣课外学术科技作品竞赛题⽬汇总课题类别题⽬名称指导教师系别社会科学类电⼦信息技术的应⽤及其我国的战略地位崔⾦花、张丽玲、曲梦可机械电⼦系社会科学类关于⼈⼝⽼龄化问题的社会调查报告王向华、张素平机械电⼦系社会科学类农民⼯⼦⼥教育问题研究周⽟梅经济贸易系社会科学类⾼校债务问题及其对策研究王亦明经济贸易系社会科学类⾼校学⽣理财观念及理财⾏为调查报告王亦明经济贸易系社会科学类⼤学⽣创业模式与项⽬选择研究范晓军经济贸易系社会科学类关于秦皇岛⼤学⽣⼼理健康⽔平的调研及其提升策略范晓军经济贸易系社会科学类⼤学⽣的素质培养之我见郭艳峥经济贸易系社会科学类调查报告——⼤学⽣就业的路在何⽅郭艳峥经济贸易系社会科学类浅谈校园⽂化建设郭艳峥经济贸易系社会科学类浅析“敬、净、静”——⼤学⽣对⼤学校园⽂化建设之我见郭艳峥经济贸易系社会科学类⼤学⽣学习状态调查周晓娜经济贸易系社会科学类⼤学⽣对⾃⾝发展规划的调查周晓娜经济贸易系社会科学类⼤学⽣利⽤⽹络情况调查周晓娜经济贸易系社会科学类⼤学⽣⽹络道德调查报告李国红经济贸易系社会科学类⼤学⽣⽹络群体调查报告李国红经济贸易系社会科学类学⽣对审计课程的认识调查报告李国红经济贸易系社会科学类现阶段个⼈理财⽅向研究论⽂李国红经济贸易系社会科学类我国不同地域的⽣活成本分析报告刘雪芹经济贸易系社会科学类我国⾼校电⼦商务专业学⽣就业去向调查报告刘雪芹经济贸易系⾃然科学类丝⽠伤流液的美容和抑菌刘微、朱⼩平农学系⾃然科学类钼肥配施氨基酸对⼩⽩菜⽣长品质的影响常连⽣农学系⾃然科学类退耕还林对⼟壤肥⼒的影响范海荣农学系⾃然科学类不同施肥⽤量及配⽐对樱桃萝⼘⽣长的影响韩志卿农学系⾃然科学类⾷⽤菌⽣产栽培技术侯东军农学系⾃然科学类不同施肥⽤量及配⽐对⼩⽩菜⽣长品质的影响张电学农学系⾃然科学类七星瓢⾍与异⾊瓢⾍对桃粉蚜捕⾷效应的研究吉志新农学系⾃然科学类⼏种昆⾍转基因⽔稻的选择性⾼素红农学系⾃然科学类黄粉⾍不同⾍态过氧化物酶同⼯酶的⽐较吉志新农学系⾃然科学类苹果毁灭性病害—苹果腐烂病发病因素研究齐慧霞农学系⾃然科学类豌⾖根腐病病原菌鉴定及不同豌⾖品种对根腐病的抗性研究齐慧霞农学系⾃然科学类⼩麦叶枯病发⽣规律及病害防治研究齐慧霞农学系⾃然科学类⽊霉⽣防菌的筛选及拮抗机制研究贺字典农学系⾃然科学类粘帚霉不同菌株对⼏种杀⾍剂耐药性的测定吉志新、齐慧霞农学系⾃然科学类铜钼微肥对不结球的⽩菜⽣长及品质影响的研究常连⽣农学系⾃然科学类丝⽠叶在美容中的作⽤刘微农学系⾃然科学类穗分化对⼩麦产量的影响韩⾦玲、周印富农学系⾃然科学类⼩麦中毒后的结构性变异付⾦峰、王凤宝农学系⾃然科学类⾷⽤菌含⽔量标准研究侯东军农学系第 1 页社会科学类⽹络社会中⼈们交往关系的变化与伦理道德的新课题研究武占芳外语系社会科学类⽹络发展及其对青少年影响研究闫倪外语系社会科学类封建迷信在⼀些地⽅泛滥及其表现原因的调查分析王娜外语系社会科学类当代⼤学⽣⼈⽣价值观与世界观的调查研究张楠外语系社会科学类法制环境下如何保护消费者的利益祁丽丽外语系社会科学类河北省民间艺术知识产权保护研究社会科学系社会科学类论中国的专利强制许可制度及其完善社会科学系社会科学类论我国企业的专利战略社会科学系社会科学类浅析我国外观设计专利侵权社会科学系社会科学类河北⽅便⾯⾏业(企业)专利战略研究社会科学系社会科学类专利间接侵权的制度研究社会科学系社会科学类论公证赔偿的⽴法完善社会科学系社会科学类个⼈集资建房法律问题的探讨社会科学系社会科学类有限责任制度新论社会科学系社会科学类我国政府采购制度中的缺陷及对策探讨社会科学系社会科学类医患纠纷中患者权益的法律保护社会科学系社会科学类三农问题的经济法对策社会科学系社会科学类⼀⼈公司的利与弊社会科学系社会科学类公司法⼈格否认制度社会科学系社会科学类浅谈公司股东权益的保护社会科学系社会科学类浅论资产信⽤公司的资本信⽤和社会科学系⾃然科学类基于灰⾊理论与插值函数的沉降预测研究孟德光⼟⽊⼯程系社会科学类⼟⽊⼯程专业学⽣专业技能训练改⾰⽅法探讨李冰⼼⼟⽊⼯程系社会科学类房价下跌对秦皇岛市房地产发展⽅向的影响李冰⼼孟德光⼟⽊⼯程系⾃然科学类⾼层建筑保温体系研究与应⽤⾦喜平⼟⽊⼯程系⾃然科学类建筑节能与建筑环境的协调⾦喜平⼟⽊⼯程系社会科学类⾼校学费问题探究数理系社会科学类⼤学⽣消费状况调查数理系社会科学类⼤学⽣上⽹状况调查数理系社会科学类⾷⽤油采购加⼯问题数理系社会科学类公交线路问题的探讨数理系社会科学类⾷品采购与加⼯⽅案数理系社会科学类震区救援搜索⽅案分析研究数理系⾃然科学类摄像机标定的分析与探讨数理系⾃然科学类数码相机定位的分析与探讨数理系社会科学类⼤学⽣消费问题的调查与分析数理系⾃然科学类国家⽣均拨款、⽣均培养费⽤和学费标准的三维动⼒学模型数理系⾃然科学类基于核主成分分析和RBF⽹络的⼈脸识别算法数理系社会科学类⽹络在⼤学⽣中的使⽤情况调查计算机系社会科学类⼤学⽣对思想教育⼯作的认识和理解计算机系社会科学类⼤学⽣对⼤学期间集体活动的认识和理解计算机系社会科学类⽹络时代⼤学⽣思想状况调查计算机系第 2 页社会科学类⽹络时代⼤学⽣社会关系调查计算机系社会科学类⽹络时代传统的教学关系与教师话语权的缺失形成的伦理困境计算机系社会科学类⼤学⽣认可的教师⾓⾊的调查与分析计算机系⾃然科学类⽹络安全在Intranet与Internet中的的区别与关系计算机系⾃然科学类Intranet环境中⽹络结构的现状与分析计算机系⾃然科学类Intranet环境中⾝份认证系统的必要性分析计算机系⾃然科学类Intranet环境中⾝份认证系统的应⽤现状计算机系⾃然科学类Intranet环境中应⽤平台分析计算机系⾃然科学类⽹络安全策略的设计和使⽤计算机系⾃然科学类Intranet环境中⽹络安全策略的分析与研究计算机系欧美学院学⽣互联⽹应⽤现状的调查与分析齐⽟斌欧美学院基于JAVA的⾼流量即时双向沟通⽹站技术崔维欧美学院旅游资源及线路管理系统张⽂元欧美学院宿舍⽹的组建及其之上的综合应⽤的实现刘正林欧美学院⼤学⽣兼职的调查动物科学系半个世纪的农村制度变迁动物科学系中学⽣⼼理状况的调查动物科学系中美经贸关系发展与挑战动物科学系畜牧业在2012年前的发展动物科学系如何进⼀步更好地解决“三农”问题动物科学系如何提⾼⼤学⽣的创新能⼒动物科学系当代⼤学⽣的⼈⽣追求动物科学系⼤学⽣毕业⾛向调查报告动物科学系⼤学⽣寒暑期社会实践报告动物科学系对健⾝美容⾏业的调查报告动物科学系学校形象调查报告动物科学系⼤学⽣课余⽣活调查报告动物科学系信息化社会中的⽣活动物科学系关于增强中国⼤学⽣在国际上竞争⼒的调查动物科学系⽤⼈单位对⼤学毕业⽣的需求状况的调查报告动物科学系第 3 页。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 6 靶标切点图
图 7 靶标像切点图
图 8 靶标像圆心图
设圆 A 的像的四个切点为 P1 , P2 , P3 , P4 ; 圆 C 的像的四个切点为 P5 , P6 , P7 , P8 ; 圆 D 的 像的四个切点为 P9 , P10 , P11 , P12 ; 圆 E 的像的四个切点为 P13 , P14 , P15 , P16 ; 圆 B 的像的两个 切点为 P17 , P18 (图 7). 根据已知物平面上切点的坐标可以计算得到交比 J , 为了计算像平面上 对应的交比, 需要提取各个像的切点, 可以通过 JAVA 软件实现. 但是由于误差等因素的影响, 初步得到的切点个数不唯一. 为此, 利用交比不变性可得以下约束条件, 对切点位置进行优化选 择 [3-5] : P1 P8 P1 P6 = J, 其中, P1 , P3 , P8 , P6 共线; P8 P3 P6 P3 P5 P9 P5 P11 = J, 其中, P11 , P9 , P7 , P5 共线; P9 P7 P11 P7 P2 P16 P2 P14 = J, 其中, P2 , P4 , P16 , P14 共线; P16 P4 P14 P4 P15 P12 P15 P10 = J, 其中, P15 , P13 , P12 , P10 共线; P12 P13 P10 P13 由以上给出的约束条件可以确定 Pi (i = 1, 2, · · · , 16) 的坐标, 从而联立直线 P1 P6 和 P2 P14 的方程得到 A 的圆心的像的坐标 OA ; 同理, 联立直线 P2 P14 和 P15 P10 的方程得到 E 的圆 的像的心坐标 OE ; 联立直线 P15 P10 和 P11 P5 的方程得到 D 的圆心的像的坐标 OD ; 联立直 线 P11 P5 和 P1 P6 的方程得到 C 的圆心的像的坐标 OC . 由于 P17 在直线 P2 P15 上, 并且 P18 在直线 P4 P17 上, 可以确定 P17 , P18 点的坐标, 从而联立直线 P1 P6 和 P17 P18 的方程得到 B 的 圆心的像的坐标 OB .
2011 年 10 月 第 27 卷 第 5 期
纯粹数学与应用数学 Pure and Applied Mathematics
Oct. 2011 Vol. 27 No. 5
数码相机定位研究
马元魁, 谭立兴, 董园园, 胡杨林
(西安工业大学数理系, 陕西 西安 710032)
摘要:讨论了数码相机的定位问题, 假设针孔镜头成像, 根据射影几何的理论建立数学 模型. 首先, 对靶标的像图形进行处理, 求出其中每个图形的外切点, 通过交比不变性和 点的共线理论对所求的外切点进行约束从而得到最优的外切点, 最后求出各个圆圆心在 像平面的坐标. 然后, 考虑图形在成像过程中发生的“畸变”, 通过空间坐标变换把在像 平面局部坐标的分析推广到全局的相机坐标中, 最终得到相机的定位. 关键词:相机标定; 畸变; 交比; 空间坐标转换 中图分类号:O29 文献标识码:A 文章编号:1008-5513(2011)05-0705-06
图 9 像平面坐标与相机坐标系坐标变换图
以像平面中心 O1 (512, 384) 为原点, 利用坐标变换 x = x − 512, y = y − 384, 可求得 OA (−189, −195), OB (−89, −187), OC (128, −171), OD (71, 118) OE (−228, 117). 因为像距是 1577 个像素单位, 所以 A, B, C, D, E 的圆心在像平面的坐标为 OA (−189, −195, 1577), OB (−89, −187, 1577), OC (128, −171, 1577), OD (71, 118, 1577), OE (−228, 117, 1577). 4.4 模型的检验 由于射影变换具有保持结合性和交比不变的性质, 所以可以从两个方面对模型进行检验: (1) 在原图上任意取共线的三点, 看它们的像点是否共线. (2) 在原图上任意取共线的四点, 求出它们的交比, 再求它们的像的交比, 看这两个交比是 否相等.
图 3 小孔成像模型原理图
已知 M 点坐标 (xc , yc , zc ), m 点的坐标 (xu , yu ) , 则 xc xu = −f z , c yc yu = −f . zc 4.2 模型的建立 1. 图形预处理 以该数码相机的光学中心为坐标原点, x-y 平面平行于像平面建立相机坐标系, 并画出相应 的物平面和像平面, 平移物平面得出其与像平面的夹角 θ, 最终得出的图形如图 4 所示: 利用 Matlab 软件
[2] ,
提取图 2 中每个圆的像的边界点坐标, 得到图 5.
图 4 成像原理图
图 5 利用 Matlab 处理靶标的像后所得的图
708
纯粹数学与应用数学
第 27 卷
2. 问题一的模型 假设图像是小孔成像, 所以相机的成像过程是一个射影变换的过程. 物体与其影像不同, 但是又有着一些共同的几何性质. 根据射影几何的理论, 物体与像对应 共线四点的交比不变, 而且, 根据拓扑不变性, 物平面上的切点对应变换到像平面上的切点 (如 图 6 所示). 因此本文按以下算法建立模型: Step1 在预处理后的图形上提取图 7 所示的切点的坐标; Step2 如图 8 所示连接切点, 即得各圆心的像; Step3 设相机的焦距为 f , 则圆心的像的坐标为 (x, y, f ).
1 问题重述
数码相机定位在交通监管等方面有广泛的应用. 所谓数码相机定位是指用数码相机摄制物 体的相片确定物体表面某些特征点的位置. 最常用的定位方法是双目定位, 即用两部相机来定 位. 对双目定位, 精确地确定两部相机的相对位置 (系统标定) 就是关键. 标定的一种做法是: 在一块平板上画若干个点, 同时用这两部相机照相, 分别得到这些点在 它们像平面上的像点, 利用这两组像点的几何关系就可以得到这两部相机的相对位置. 然而, 没 有几何尺寸的“点”无法直接得到. 实际的做法是在物平面上画若干个圆 (称为靶标), 它们的 圆心就是几何的点了. 而它们的像一般会变形. 所以必须从靶标上的这些圆的像中把圆心的像 精确地找到, 标定就可实现. 设计靶标如下 (如图 1 所示): 取 1 个边长为 100 mm 的正方形, 分别以四个顶点 (对应 为 A、C 、D、E ) 为圆心, 12 mm 为半径作圆. 以 AC 边上距离 A 点 30 mm 处的 B 为圆 心,12 mm 为半径作圆, 用一位置固定的数码相机摄得其像, 如图 2 所示. 本文将解决以下问题: (1) 建立数学模型和算法以确定靶标上圆的圆心在该相机像平面的像坐标, 这里坐标系原 点取在该相机的光学中心,x-y 平面平行于像平面; (2) 对由图 1、图 2 分别给出的靶标及其像, 计算靶标上圆的圆心在像平面上的像坐标, 该 相机的像距 (即光学中心到像平面的距离) 是 1577 个像素单位 (1 毫米约为 3.78 个像素单位), 相机分辨率为 1024 × 768; (3) 设计一种方法检验 (1) 中的模型, 并对方法的精度和稳定性进行讨论.
收稿日期:2011-04-10. 作者简介:马元魁 (1980-), 硕士, 研究方向:数学模型. 获奖等级:2008 年全国大学生数学建模陕西赛区一等奖.
706
纯粹数学与应用数学
第 27 卷图 1 靶标示意图图 Nhomakorabea 靶标的像
2 问题分析
从图 1 与图 2 可见圆在像平面的像形状发生了变化, 从而可知物平面与像平面存在夹角, 而且需要考虑数码相机拍摄的角度, 拍摄时的高度, 两个相机的相对位置, 以及相机的畸变等 因素. 通过观察靶标的像与靶标之间的位置关系可以判断相机在图 1 中 A 左上角附近的区域. 图 2 中所有图形的边界及图形整体的边界都发生了变形, 但通过 B 与 A 的相对位置可以判断 出靶标的像中的图形所对应的原像. 因为圆是中心对称图形, 根据小孔成像原理, 相机无论从哪 个角度拍照所得到的像应该是轴对称图形, 并且圆心在像平面上的投影在它们的对称轴上. 本 文首先对像进行定量的分析, 可以利用 Matlab 数学软件对边界点进行提取, 然后利用 JAVA 编 程计算出对称轴, 进而根据射影几何的理论确定靶标上圆的圆心在该相机像平面的像坐标.
3 假设与符号
3.1 模型假设 1.假设两个数码相机处于同一高度; 2.假设问题一和问题二不受相机畸变问题的影响; 3.假设像素为最小不可再细化的单元; 4. 假设相机的内外因素是固定的参数; 5. 假设物距是远远大于焦距的; 6. 假设该数码相机一切正常. 3.2 符号的定义和说明 n: 光学中心到物平面的距离即物距; 单位: 像素. m: 光学中心到像平面的距离即像距; 单位: 像素. Xj : 图形边界上的点; 单位: 个. f : 相机的焦距; 单位: 像素.
第5期
马元魁 等: 数码相机定位研究
709
4.3 模型的求解 根据问题二中所给物平面上点的坐标, 计算得到交比 J =
484 589 .
以 O 点为原点, 在基本模型中利用 JAVA 软件, 结合优化手段, 得到像平面上各切点的坐 标 (如图 9 所示), 进一步可求得 OA (323, 189), OB (423, 197), OC (640, 213), OD (583, 502), OE (284, 501).
Abstract: The digital camera calibration was discussed. Assuming the pinhole camera imaging, a mathematical model was built according to the theory of projective geometry. Firstly, the graphics on the target were processed, in which the circumscribed points of each graph were obtained, and the optimal circumscribed points were obtained with constraints of cross ratio invariance. So the coordinates of the center of each circle in the image plane can be obtained. Then considering the distortion of graphics in imaging process, the analysis in the local coordinate was extended to the global coordinate through space coordinate transformation to obtain the final camera position. Key words: calibration, distortion; cross ratio, space coordinate transformation 2010 MSC: 03C65