数学建模 数码相机定位
数学建模 历年试题及论文
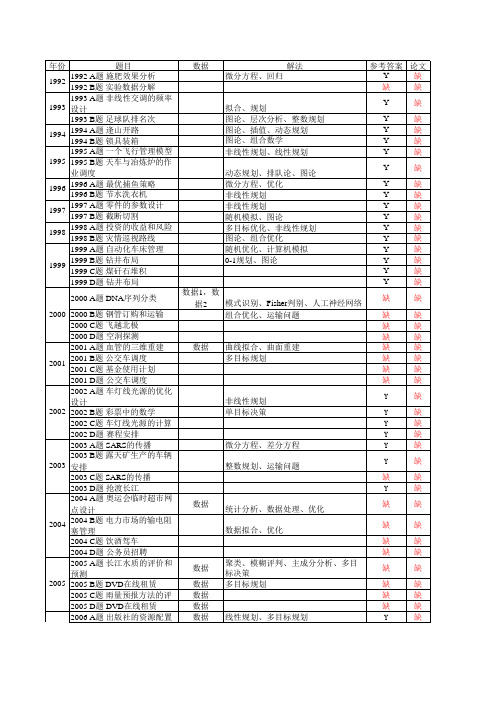
拟合、规划 图论、层次分析、整数队论、图论 微分方程、优化 非线性规划 非线性规划 随机模拟、图论 多目标优化、非线性规划 图论、组合优化 随机优化、计算机模拟 0-1规划、图论
2000 2000 B题 钢管订购和运输 缺 2000 C题 飞越北极 缺 2000 D题 空洞探测 缺 2001 A题 血管的三维重建 数据 曲线拟合、曲面重建 缺 多目标规划 2001 B题 公交车调度 缺 2001 2001 C题 基金使用计划 缺 2001 D题 公交车调度 缺 2002 A题 车灯线光源的优化设计 非线性规划 Y 2002 B题 彩票中的数学 单目标决策 Y 2002 2002 C题 车灯线光源的计算 Y 2002 D题 赛程安排 Y 2003 A题 SARS的传播 微分方程、差分方程 Y 2003 B题 露天矿生产的车辆安排 整数规划、运输问题 Y 2003 2003 C题 SARS的传播 缺 2003 D题 抢渡长江 Y 2004 A题 奥运会临时超市网点设计 数据 统计分析、数据处理、优化 缺 2004 B题 电力市场的输电阻塞管理 数据拟合、优化 缺 2004 2004 C题 饮酒驾车 缺 2004 D题 公务员招聘 缺 2005 A题 长江水质的评价和预测 数据 聚类、模糊评判、主成分分析、多目标决策 缺 2005 B题 DVD在线租赁 数据 多目标规划 缺 2005 2005 C题 雨量预报方法的评价 数据 缺 2005 D题 DVD在线租赁 数据 缺 2006 A题 出版社的资源配置 数据 线性规划、多目标规划 Y 2006 B题 艾滋病疗法的评价及疗效的预测 回归、线性规划 数据 Y 2006 2006 C题 易拉罐形状和尺寸的最优设计 缺 2006 D题 煤矿瓦斯和煤尘的监测与控制 数据 缺 2007 A题 中国人口增长预测 数据 微分、差分方程 Y 2007 B题 乘公交,看奥运 数据 图论、0-1 规划、动态规划 Y 2007 2007 C题 手机“套餐”优惠几何 数据 Y
2008年数学建模A题论文

靶标圆心像坐标确定与数码相机定位摘要数码相机实现定位功能,需确定靶标圆心的像坐标。
本文就如何确定靶标圆心像坐标展开了讨论,并给出了计算两部相机相对位置的模型。
在问题一中,我们采用坐标变换的方法建立确定靶标圆心像坐标的模型。
根据坐标系之间的关系,分别通过物坐标系的旋转、平移以及相机坐标系的缩放,引入绕物坐标系三坐标轴旋转的角度θξϕ,,以及物坐标系平移的量度321,,t t t 等参数确定出物坐标系到像坐标系变换的方程,由此即可得到求解靶标圆心像坐标的模型。
求解方程里面的参数时,考虑到计算的方便,我们选择两圆内公切线的交点作为标定点。
计算它们的物坐标与像坐标,代入上述方程即可求得参数的值。
对于问题二,根据圆的有关性质,两条内公切线的斜率(或斜率倒数)分别为连接对应两圆上任意两点连线斜率(或斜率倒数)的最大值和最小值。
基于此,容易求得像坐标系里面对应的内公切线的方程,它们的交点即为标定点的像坐标,对应的物坐标容易得到。
然后将这些标定点的坐标分别代入问题一建立的物坐标系到像坐标系变换的方程,求解得到相应的参数θξϕ,,,321,,t t t 的值。
最后再将各园圆心的物坐标代入上述方程,求得各圆圆心像坐标结果为:A(-49.8577,50.6559),B(-24.5423,49.1824),C(32.5168,48.5784),D(18.3139,-30.6194),E(-60.3038,-30.3856)。
在问题三中,我们选取物坐标系里面一条直线上的9个点,对它们对应的像坐标进行一元线性回归分析,对模型的精度进行检验;最终得到这9个点拟合优度为0.9096非常接近1,说明模型精度较高。
对于模型稳定性的分析,我们将各圆圆心的物坐标向左偏移1mm,考查对应的像坐标的变化;得到各圆心像坐标的偏移量的平均值与圆心物坐标的偏移量的相对误差是2.62%,说明模型稳定性较好。
最后我们对问题一、二中模型进行了检验,在A,C,D,E 四个圆上分别选取一些特定的点,利用它们的像坐标分别求出其对应的物坐标,找到这些物坐标与对应圆心物坐标之间的距离,比较这些距离同圆半径的实际值(即12mm)的差值,最终得到它们相对误差的平均值是1.66%,说明模型的可行性是较高的。
大学生数学建模竞赛全国一等奖获奖论文之物理和数学的结合

数码相机定位摘要本文是双目定位的具体模型和方法进行了研究,分别给出了针孔线性模型、椭圆线性回归模型、RAC模型等并对其进行研究。
对于问题一,在针孔线性模型的基础上,通过对数码相机内外部参数的标定,确定靶标到靶标像的坐标转化关系,建立其坐标转换模型。
对于问题二,利用图像处理所得的像素模拟图表确定20组特征点的坐标在世界坐标系和图像坐标系的坐标,代入上述转换关系来确定系数矩阵M,进而求得圆心在像平面的像坐标,然后利用畸变校正模型对结果进行校正。
结果为左上圆(119.0938,69.6890)、中间圆(155.7689,72.4757)右上圆(234.6404,78.4603)、左下圆(105.4604,185.3796)右下圆(214.5271,184.9706)。
对于问题三,建立椭圆线性回归模型对靶标的像进行拟合,得到的图像中心坐标即为圆心在像平面的像坐标。
结果分析还表明该方法的精度和稳定性都比较好。
结果如下:左上圆(120.0039,69.2536)、中间圆(155.1462,73.0654)右上圆(236.2001,77.8279)、左下圆(103.4572,182.3599)右下圆(216.8469,179.6788)。
模型三与模型一的结果相差最大为2.945%。
很好地验证了模型一的结果的准确性对于问题四,利用RAC模型,确定出单个相机的外部参数,得出其旋转矩阵和平移向量,即完成单个相机的定标,然后利用其几何转化由相机各自的旋转矩阵和平移向量求解出两个相机的相对位置。
关键词:针孔线性模型像素模拟图表畸变校正曲线拟合RAC模型一.问题的重述与分析已知:一靶标和用一位置固定的数码相机摄的它的像,如题目中图3所示。
其中靶标如下,取1个边长为100mm的正方形,分别以四个顶点(对应为A、C、D、E)为圆心,12mm为半径作圆。
以AC边上距离A点30mm处的B为圆心,12mm为半径作圆,如题目中图1.1所示。
数学建模十大经典算法( 数学建模必备资料)
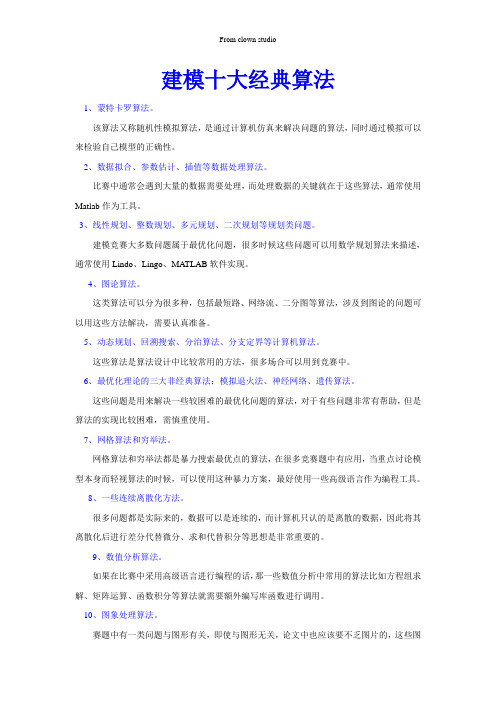
建模十大经典算法1、蒙特卡罗算法。
该算法又称随机性模拟算法,是通过计算机仿真来解决问题的算法,同时通过模拟可以来检验自己模型的正确性。
2、数据拟合、参数估计、插值等数据处理算法。
比赛中通常会遇到大量的数据需要处理,而处理数据的关键就在于这些算法,通常使用Matlab作为工具。
3、线性规划、整数规划、多元规划、二次规划等规划类问题。
建模竞赛大多数问题属于最优化问题,很多时候这些问题可以用数学规划算法来描述,通常使用Lindo、Lingo、MATLAB软件实现。
4、图论算法。
这类算法可以分为很多种,包括最短路、网络流、二分图等算法,涉及到图论的问题可以用这些方法解决,需要认真准备。
5、动态规划、回溯搜索、分治算法、分支定界等计算机算法。
这些算法是算法设计中比较常用的方法,很多场合可以用到竞赛中。
6、最优化理论的三大非经典算法:模拟退火法、神经网络、遗传算法。
这些问题是用来解决一些较困难的最优化问题的算法,对于有些问题非常有帮助,但是算法的实现比较困难,需慎重使用。
7、网格算法和穷举法。
网格算法和穷举法都是暴力搜索最优点的算法,在很多竞赛题中有应用,当重点讨论模型本身而轻视算法的时候,可以使用这种暴力方案,最好使用一些高级语言作为编程工具。
8、一些连续离散化方法。
很多问题都是实际来的,数据可以是连续的,而计算机只认的是离散的数据,因此将其离散化后进行差分代替微分、求和代替积分等思想是非常重要的。
9、数值分析算法。
如果在比赛中采用高级语言进行编程的话,那一些数值分析中常用的算法比如方程组求解、矩阵运算、函数积分等算法就需要额外编写库函数进行调用。
10、图象处理算法。
赛题中有一类问题与图形有关,即使与图形无关,论文中也应该要不乏图片的,这些图形如何展示以及如何处理就是需要解决的问题,通常使用Matlab进行处理。
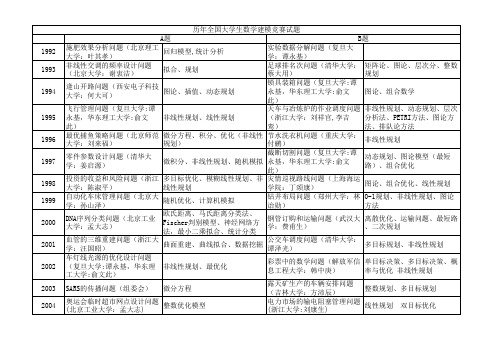
历年全国数学建模试题及解法赛题解法93A非线性交调的频率设计拟合、规划93B足球队排名图论、层次分析、整数规划94A逢山开路图论、插值、动态规划94B锁具装箱问题图论、组合数学95A飞行管理问题非线性规划、线性规划95B天车与冶炼炉的作业调度动态规划、排队论、图论96A最优捕鱼策略微分方程、优化96B节水洗衣机非线性规划97A零件的参数设计非线性规划97B截断切割的最优排列随机模拟、图论98A一类投资组合问题多目标优化、非线性规划98B灾情巡视的最佳路线图论、组合优化99A自动化车床管理随机优化、计算机模拟99B钻井布局0-1规划、图论00A DNA序列分类模式识别、Fisher判别、人工神经网络00B钢管订购和运输组合优化、运输问题01A血管三维重建曲线拟合、曲面重建01B 公交车调度问题多目标规划02A车灯线光源的优化非线性规划02B彩票问题单目标决策03A SARS的传播微分方程、差分方程03B 露天矿生产的车辆安排整数规划、运输问题04A奥运会临时超市网点设计统计分析、数据处理、优化04B电力市场的输电阻塞管理数据拟合、优化05A长江水质的评价和预测预测评价、数据处理05B DVD在线租赁随机规划、整数规划06A 出版资源配置06B 艾滋病疗法的评价及疗效的预测 07A 中国人口增长预测 07B 乘公交,看奥运 多目标规划 数据处理 图论 08A 数码相机定位 08B 高等教育学费标准探讨09A 制动器试验台的控制方法分析 09B 眼科病床的合理安排 动态规划 10A 10B赛题发展的特点:1.对选手的计算机能力提出了更高的要求:赛题的解决依赖计算机,题目的数据较多,手工计算不能完成,如03B ,某些问题需要使用计算机软件,01A 。
19703-数学建模-论文-数码相机定位问题(成稿)

数码相机定位的数学模型摘要在实际应用中,如何使用计算机获得具有高度真实感的三维模型,成为人们越来越关心的问题。
其中,对相机进行标定是三维图像建模的基础,同时也是一大技术难点。
本文围绕如何从单幅图像结构特征中提取信息,进而对相机进行标定,以及如何利用相关特征点的信息获得相机内外参数展开讨论。
问题一,将相机简化成针孔成像模型,则像平面与靶标成中心投影关系,靶标上的圆的公切线与其在像平面上投影图形的公切线有一一对应的关系,对应切点连线的交点,就是圆心在像平面上的投影的坐标,本文称此方法为切线交点法。
问题二,是对问题一中模型求解方法的具体实现,即通过计算机编程将像图二值化,减少计算量,并通过对图像二值矩阵的局部最优化搜索,找到切点位置,计算靶标的圆心投影坐标。
得到圆A、C、D、E的圆心在相机坐标系中的投影对相机的内外参数进行标定,得到相机的隐参数矩阵M。
取靶标上的其它点,通过线性变换得到图像坐标,与切线交点法所得的图像坐标作比较,结果横坐标相差非常小,纵坐标误差大约为1像素,这就表明了该方法的合理性与可靠性。
此外,为进一步检验其精度与稳定性,引入了简单有效的灭点法,根据平行线灭点一致性和光心与像平面灭点连线相互垂直两条性质,分别得到灭点位置偏差最大仅为10像素,连线夹角偏差为0.133度。
由灭点对光轴的敏感性,可知模型有很高的稳定性。
问题四,根据标定相机所得到的外部参数,分别确定某一空间点在两相机坐标系与世界坐标系之间的坐标关系式,消去世界坐标后得到两相机坐标系的转换关系,从而确定了两相机的相对位置。
这里,我们详细考察了相机坐标系与世界坐标系间的坐标变换方法,适用于所有中心投影问题,在各行各业,特别是图像处理领域,有着广泛的应用。
关键字:相机标定切线交点法中心投影灭点双目定位1 问题重述随着计算机技术的发展,计算机视觉作为计算机科学技术的一个分支在近二十多年来也得到了迅猛发展和广泛应用,它用光学或电子器件模拟生物视觉的某些功能,获得被测物的信息,完成对三维信息的实时检测。
2005-2015高教社杯全国大学生数学建模竞赛A、B题评阅要点

水质排序最差的地区不一定是污染源最严重的地区。 用长江干流上的 7 个观测站点将长江分 为 6 个江段,逐段计算各江段的排污量,找出主要污染源所在的区域。 首先研究每个江段中污染物浓度 C (mg/L) 的变化规律。由于题目中给出了污染物的降 解系数,附件 3 给出了每个月的污染物浓度、流量、流速等数据,若忽略污染物的局部扩散 (研究的是总体污染) ,在考虑固定时段(月)的污染物浓度时,可利用一般一维水质模型 的近似解 C = C 0 e
2008 A 题评阅要点 ............................................................................................................. 28 2008B 题 高等教育学费标准探讨 .................................................................................... 29
2009 B 题评阅要点 ............................................................................................................. 40
CUMCM-2009, A 题:第 1 页 / 共 42 页
2005A 题: 长江水质的评价和预测
水是人类赖以生存的资源,保护水资源就是保护我们自己,对于我国大江大河水资源 的保护和治理应是重中之重。专家们呼吁: “以人为本,建设文明和谐社会,改善人与自然 的环境,减少污染。 ” 长江是我国第一、世界第三大河流,长江水质的污染程度日趋严重,已引起了相关政府 部门和专家们的高度重视。2004 年 10 月,由全国政协与中国发展研究院联合组成“保护长 江万里行”考察团,从长江上游宜宾到下游上海,对沿线 21 个重点城市做了实地考察,揭 示了一幅长江污染的真实画面,其污染程度让人触目惊心。为此,专家们提出“若不及时拯 救,长江生态 10 年内将濒临崩溃” (附件1) ,并发出了“拿什么拯救癌变长江”的呼唤(附 件 2) 。 附件 3 给出了长江沿线 17 个观测站(地区)近两年多主要水质指标的检测数据,以及 干流上7个观测站近一年多的基本数据(站点距离、水流量和水流速) 。通常认为一个观测 站(地区)的水质污染主要来自于本地区的排污和上游的污水。一般说来,江河自身对污染 物都有一定的自然净化能力, 即污染物在水环境中通过物理降解、 化学降解和生物降解等使 水中污染物的浓度降低。反映江河自然净化能力的指标称为降解系数。事实上,长江干流的 自然净化能力可以认为是近似均匀的, 根据检测可知, 主要污染物高锰酸盐指数和氨氮的降 解系数通常介于 0.1~0.5 之间,比如可以考虑取 0.2 (单位:1/天)。附件 4 是“1995~2004 年 长江流域水质报告”给出的主要统计数据。下面的附表是国标(GB3838-2002) 给出的《地表 水环境质量标准》中 4 个主要项目标准限值,其中Ⅰ、Ⅱ、Ⅲ类为可饮用水。 请你们研究下列问题: (1)对长江近两年多的水质情况做出定量的综合评价,并分析各地区水质的污染 状况。 (2)研究、分析长江干流近一年多主要污染物高锰酸盐指数和氨氮的污染源主要在哪 些地区? (3)假如不采取更有效的治理措施,依照过去 10 年的主要统计数据,对长江未来水 质污染的发展趋势做出预测分析,比如研究未来 10 年的情况。 (4)根据你的预测分析,如果未来 10 年内每年都要求长江干流的Ⅳ类和Ⅴ类水的比 例控制在 20%以内,且没有劣Ⅴ类水,那么每年需要处理多少污水? (5)你对解决长江水质污染问题有什么切实可行的建议和意见。
数学建模竞赛命题过程及题目分析

油位探针
油位探测 装置
油位探针
油
β
3m
地平线垂直线
(a)无偏转倾斜的正截面图 (b)横向偏转倾斜后正截面图
结合评奖对本科组选作A, B题的分析
• 本科组全国14108队参赛,送全国1393份论文,其中A题877 份(63%),B题516份(37%),其比例基本代表全部参赛 队的情况.
• 获一等奖的210 队中A题133队,B题77队.
• A题获一等奖的队多数集中在重点高校:
北京17队(北航5、北大3、北邮3、清华2)
图3 储油罐截面示意图
油
注油口
位
出油管
探
针 油浮子
1.2m
1.2m
油 α
0.4m 2.05m (a) 小椭圆油罐cm正面示意图
水平线
1.78m
Байду номын сангаас
(b) 小椭圆油罐截面示意图
图4 小椭圆型油罐形状及尺寸示意图
附件1 实验数据
流水 C进油 D油位高
号
量/L 度/mm
采集时间
说明
2010-08-20 (1)罐体无变位进油,罐内
11
50 159.02
10:32:18 油量初值262L;
12
100 176.14
2010-08-20 (2)C列进油量是每次加入 10:33:18 50L油后的累加值
13
150 192.59
2010-08-20 (3)D列是原罐内初始油量加入 10:34:18 相应油量后油位高度值。
数码相机相对位置定位方法

数码相机相对位置定位方法1.摘要本文给出了空间中两部固定照相机相对位置的标定方法,将照相机成像过程近似为针孔成像过程,使得成像过程中光学中心—像点—物点三点共线,实现了成像的非线性到线性的简化。
文中将标定两部相机相对位置的方法分成三个步骤:第一步,将针孔成像抽象为点投影式映射的过程,根据射影几何中“点线结合的不变性”,具体通过射影前后任意两圆的公切线与圆的切点的唯一性,并且运用“标靶像坐标得切点切线算法”对所给像图片进行操作,求得切点的坐标,每对切点连线的交点即为圆心的像。
求得的结果如下表:点 A B C D E坐标(-194,-193,1577) (-97,-186,1577) (119,-169,1577) (67,113,1577) (-226,114,1577)(单位:像素)第二步,依靠成像过程光学中心—像点—物点三点共线的性质,用已知的像点坐标去标定对应的标靶圆心的坐标,再利用标靶上各点的几何关系,对待定系数进行求解,从而得到标靶圆心坐标;第三步,在已知标靶圆心在两个相机坐标系中的坐标的前提下,利用这些坐标求出坐标系变换矩阵。
再利用求出的变换矩阵求出一部相机在另一相机坐标系中的坐标,这样就可以求出两个相机的相对位置。
此外,根据投影过程中“共线不变性”和“交比不变性”对模型中的第一个步骤的结果进行评价,并对这两种方法的准确性和稳定性进行讨论,其中设计了恰当的算法对方法二进行了全面的评定,得出方法一具有局限性而方法二具有良好得准确性和稳定的结果。
在模型扩展中,我们建立了考虑畸变的非线性模型。
分析了理想像点坐标和实际有畸变的像点坐标之间的函数关系,从而提出了将非线性模型问题转换到线性模型下解决的方案。
关键词:照相机定位针孔模型射影变换交比坐标变换目录数码相机相对位置定位方法 (1)1.摘要 (1)2.问题重述 (3)3.问题分析 (3)4.模型假设 (3)5.符号说明 (4)6.模型建立与求解 (4)1)模型准备: (4)2)模型建立 (4)3)对问题一的解答: (6)a)问题分析: (6)b)算法:标靶像坐标的切线切点算法 (6)c)改进算法:基于罚函数思想的切点切线算法 (7)d)算法分析: (7)4)对问题二的回答: (7)5)求解标靶圆心在照相机坐标系下的坐标 (8)a)问题分析: (8)b)求解方法: (8)6)利用空间坐标变换法确定两部照相机的相对位置: (10)a)问题分析: (11)b)求解过程: (11)7.模型分析及检验 (12)1)对问题三的回答: (12)a)方法一:利用共线不变性对结果的检验 (12)b)方法二:基于射影变换交比不变性的检验方法 (13)2)模型分析 (16)8.模型拓展 (16)9.参考文献 (17)10.附录 (18)2.问题重述题目要求根据标靶的像和标靶进行对系统的标顶,最终找到两台照相机的相对位置。
全国大学生数学建模竞赛赛题综合评析
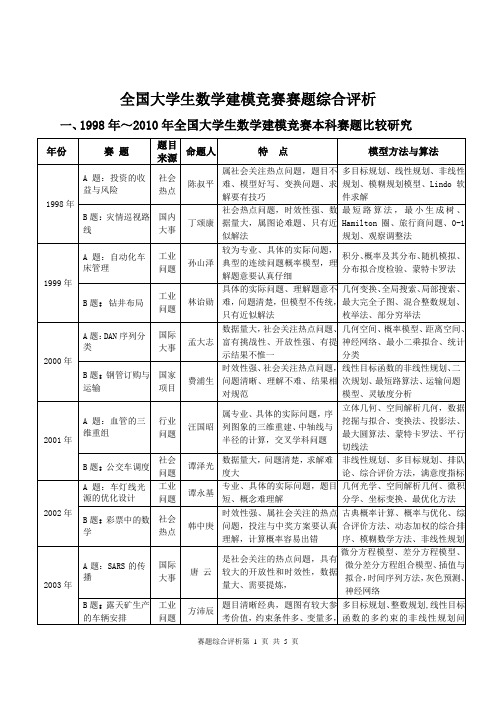
社会热点
叶其孝、周义仓
开放性强、社会关注性强,突出数据来源的可靠性、结论解释的合理性
数据收集与处理、问题的分析与假设,初等数学方法、一般统计方法、多目标规划、回归分析、综合评价方法、灰色预测
2009年
A题:制动器试验台的控制方法分析
工业问题
方沛辰、刘笑羽
问题具体、专业性强,要花时间读懂、理解清楚问题
出版社的资源配置
孟大志
艾滋病疗法的评价及疗效的预测
边馥萍
易拉罐形状和尺寸的最优设计(C题)
叶其孝
煤矿瓦斯和煤尘的监测与控制(D题)
韩中庚
2007年
中国人口增长预测
唐云
乘公交,看奥运
方沛辰、吴孟达
手机“套餐”优惠几何(C题)
韩中庚
体能测试时间安排(D题)
刘雨林
2008年
数码相机定位
谭永基
高等教育学费标准探讨
叶其孝、周义仓
地面搜索(C题)
肖华勇
NBA赛程的分析与评价(D题)
姜启源
2009年
制动器试验台的控制方法分析
方沛辰、刘笑羽
眼科病床的合理安排
吴孟达、毛紫阳
卫星和飞船的跟踪测控(C题)
周义仓
会议筹备(D题)
王宏健
2010年
储油罐的变位识别与罐容表标定
韩中庚
2010年上海世博会影响力的定量评估
杨力平
输油管的布置(C题)
1
6
8
付鹂
重庆大学
1
6
9
姜启源
清华大学
4
3
10
陈叔平
浙江大学、贵州大学
2
5
11
00年以来数学建模真题以及优秀论文所用到的方法
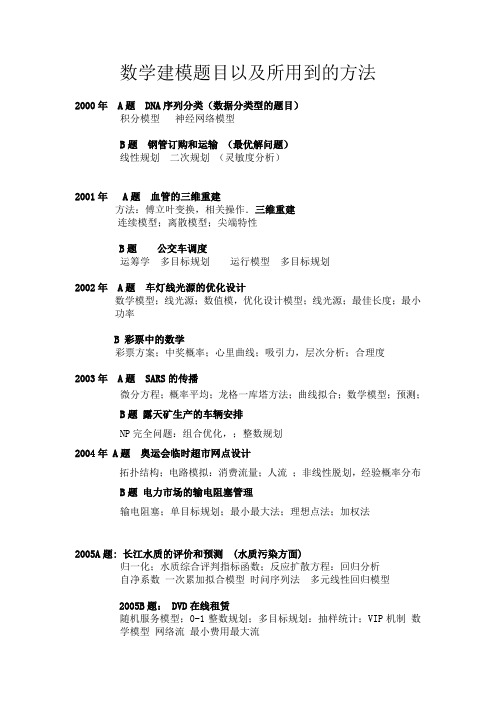
数学建模题目以及所用到的方法2000年 A题 DNA序列分类(数据分类型的题目)积分模型神经网络模型B题钢管订购和运输(最优解问题)线性规划二次规划(灵敏度分析)2001年 A题血管的三维重建方法:傅立叶变换,相关操作.三维重建连续模型;离散模型;尖端特性B题公交车调度运筹学多目标规划运行模型多目标规划2002年 A题车灯线光源的优化设计数学模型;线光源;数值模,优化设计模型;线光源;最佳长度;最小功率B 彩票中的数学彩票方案;中奖概率;心里曲线;吸引力,层次分析;合理度2003年 A题 SARS的传播微分方程;概率平均;龙格一库塔方法;曲线拟合;数学模型;预测;B题露天矿生产的车辆安排NP完全问题:组合优化,;整数规划2004年 A题奥运会临时超市网点设计拓扑结构;电路模拟:消费流量;人流;非线性脱划,经验概率分布B题电力市场的输电阻塞管理输电阻塞;单目标规划;最小最大法;理想点法;加权法2005A题: 长江水质的评价和预测(水质污染方面)归一化;水质综合评判指标函数;反应扩散方程:回归分析自净系数一次累加拟合模型时问序列法多元线性回归模型2005B题: DVD在线租赁随机服务模型;0-1整数规划;多目标规划:抽样统计;VIP机制数学模型网络流最小费用最大流2006年 A 出版社的资源配置层次分析法,量化分析,多目标决策,无量纲化,灰色预测B 艾滋病疗法的评价及疗效的预测二次曲线,多元方差分析,增量成本—效应模型2007年 A题:中国人口增长预测丁克现象,人口发展偏微分方程,人口区域结构向量模型,生存分析,计算机模拟Logistic 模型灰色预测动态模拟 Compertz 函数B 乘公交,看奥运合集求交算法,搜索方法,凸轮模型,算法复杂性,BFS算法,公交路线选择点搜索线搜索双目标优化2008 A 数码相机定位小孔成像,变换矩阵,公切线,计算机模拟B 高等教育学费的优化二八原则法,个人期望收益,加权满意度,成本分担2009 A题制动器试验台的控制方法分析制动器试验台等效转动惯量惯性模拟电惯量 PID 算法神经元模型2009B题眼科病床的合理安排合理度;C语言仿真;数据搜索;流程图;优先级;M/M/1排队模型优先值分配计算机仿真模拟卡方拟合检验2010年 A题储油罐的变位识别与罐容表标定多重积分、分段函数、切片、体积标定、随机数据检验、数字式油量计B题 2010年上海世博会影响力的定量评估Mann-Whitney检验回归拟合层次分析方法多指标综合评价模型收益分析方法影响力因子2011年 A题城市表层土壤重金属污染分析三维插值与拟合地质累积指数聚类分析偏微分方程地统计内梅尔指数因子分析扩散模型回归分析B题交巡警服务平台的设置与调度线性回归非线性规划动态规划静态规划 Dijkstra矩阵算法。
大学生数学建模例题论文解答(1)

D题DVD在线租赁(论文下载地址)
15
2006
A题出版社的资源配置(论文下载地址)
B题艾滋病疗法的评价及疗效的预测(论文下载地址)
C题易拉罐形状和尺寸的最优设计(论文下载地址)
D题煤矿瓦斯和煤尘的监测与控制(论文下载地址)
16
2007
A题中国人口增长预测(论文下载地址)
B题乘公交,看奥运(论文下载地址)
C题手机“套餐”优惠几何(论文下载地址)
D题体能测试时间安排(论文下载地址)
17
2008
A题数码相机定位(论文下载地址【1】【2】)
B题高等教育学费标准探讨(下载地址【1】【2】)
C题地面搜索(论文下载地址)
D题NBA赛程的分析与评价(论文下载地址)
C题SARS的传播(论文下载地址)
D题抢度长江(论文下载地址)
13
2004
A题奥运会临时超市网点设计(论文下载地址)
B题电力市场的输电阻塞管理(论文下载地址)
C题饮酒驾车(论文下载地址)
D题公务员招聘(论文下载地址)
14
2005
A题长江水质的评价和预测(论文下载地址)
B题DVD在பைடு நூலகம்租赁(论文下载地址)
[论文]1992—2008年全国大学生数学建模竞赛获奖论文(汇总贴)
序号
年份
试题名称
1
1992
A题施肥效果分析(论文下载地址)
B题试验数据分解(论文下载地址)
2
1993
A题非线性交调的频率设计(论文下载地址)
B题足球队排名次(论文下载地址)
3
1994
A题逢山开路(论文下载地址)
历年高教杯全国大学生数学建模题目
A 1992 B A 1993 B A 1994 B 锁具装箱 锁具装箱 足球比赛的排名问题 逢山开路 实验数据分解 交调频率设计 农作物施肥效果分析
A 1995 B A 1996 B A 1997 B
一个飞行管理问题 天车与冶炼炉的作业调度 节水洗衣机问题 最优捕鱼问题 零件的参数设计 最优截断切割问题
长江水质的评价和预测 DVD 在线租赁 在线租赁
2006
2007
出版社的资源配置 艾滋病疗法的评价及疗效 B 的预测 A 中国人口增长预测 A B A 乘公交, 乘公交,看奥运 数码相机定位
2008 B 2009
高等教育学费标准探讨 制动器试验台的控制方法 A 分析 B 眼科病床的合理安排
A 1998 B A 1999 B A 2000 B A 2001 B
投资的收益和风险 灾情巡视路线 自动化车床管理 钻井布局 DNA 序列分类 钢管订购和运输
血管的三维重建 公交车调度
A 2002 B A 2003 B A 2004 B A 2005 B
车灯线光源的优化设计 彩票中的数学 SARS 的传播 露天矿生产的车辆安排 奥运会临时超市网点设计 电力市场的输电阻塞管理
全国大学生数学建模竞赛历年试题
(浙江大学:刘祥官,李吉 分析法、PETRIБайду номын сангаас法、图论方
此)
鸾)
法、排队论方法
最优捕鱼策略问题(北京师范 大学:刘来福)
微分方程、积分、优化(非线性 规划)
节水洗衣机问题(重庆大学: 付鹂)
非线性规划
零件参数设计问题(清华大 学:姜启源)
截断切割问题(复旦大学:谭 微积分、非线性规划、随机模拟 永基,华东理工大学:俞文
微分方程
数码相机定位
非线性方程模型
制动器试验台的控制方法分析
DVD在线租赁问题(清华大学: 谢金星等)
GM
0-1规划 多目标规划
艾滋病疗法的评价及疗效的预
测(天大:边馥萍)
乘公交,看奥运(吉大:方沛
辰,国防科大:吴孟达)
高等教育学费标准探讨
(开放性题目)
眼科病床的合理安排
1999 2000 2001
拟合、规划
足球排名次问题(清华大学: 矩阵论、图论、层次分、整数
蔡大用)
规划
逢山开路问题(西安电子科技 大学:何大可)
图论、插值、动态规划
锁具装箱问题(复旦大学:谭 永基,华东理工大学:俞文 图论、组合数学 此)
飞行管理问题(复旦大学:谭
天车与冶炼炉的作业调度问题 非线性规划、动态规划、层次
永基,华东理工大学:俞文 非线性规划、线性规划
酒后开车问题(清华大学:姜 启源)
微分方程
雨量预报方法的评价问题(复 旦大学:谭永基)
模糊评价 插值
易拉罐形状和尺寸的最优设计
(北理工:叶其孝)
手机“套餐”优惠几何(信息
工程大学:韩中庚)
地面搜索
一笔画问题、数学规划模型
历届数学建模国赛题

历届数学建模国赛题 及优秀论文赏析
2008 B:高等教育学费标准探讨 问题涉及: 评价(3),预测(2) 主要可用模型或方法: 不定 要求能力: 数据搜索能力,微分方程,个人价值观, 文笔 决胜关键: 结论的合理性,数据的全面程度和准确程 度
2009 A: 制动器试验台的控制方法分析 问题涉及: 计算(3),评价(1),优化(1) 主要可用模型或方法: 物理知识(静动力学分析,转动惯量等), 排列组合,优化算法 要求能力: 大数据处理,大数据计算,优化软件应用, 计算机仿真 决胜关键: 结果正确性
2007 A:中国人口增长预测 问题涉及: 预测(5) 主要可用模型或方法: 微分方程模型,马尔科夫链,计算机仿真 要求能力: 文字信息处理,大量数据处理,函数拟合以及参 数确定,数据搜索能力,高等数学知识(常微分 方程稳定性和矩阵知识) 决胜关键: 微分方程拟合程度,马尔科夫矩阵的处理和求解, 创新点(如参数确定方法等),结论的合理性
预测类问题
优化类问题
计算类问题
必备能力
大数据处理
计算机仿真
总结
从单纯的统计结果看: 1.预测类问题出现情况成波动状,截至09年 处于低谷。 2.优化类问题出现比较稳定。 3.近两年开始偏向于应用专业知识较多的计 3. 算类问题。 4.总的来说竞赛还不成熟,有时在求新求变, 有时则中规中矩。
一些建议
2007 B: 乘公交,看奥运 乘公交, 问题涉及: 优化(5) 主要可用模型或方法: 图论,动态规划算法,最短路径(dijkstra 算法) 要求能力: 大量数据处理,计算机程序设计,优化软 件应用 决胜关键: 程序运行速度,算法的正确性
历年全国赛数学建模题目

目录1996年全国大学生数学建模竞赛题目 (2)A题最优捕鱼策略 (2)B题节水洗衣机 (2)1997年全国大学生数学建模竞赛题目 (3)A题零件的参数设计 (3)B题截断切割 (4)1998年全国大学生数学建模竞赛题目 (5)A题投资的收益和风险 (5)B题灾情巡视路线 (6)1999创维杯全国大学生数学建模竞赛题目 (7)A题自动化车床管理 (7)B题钻井布局 (8)C题煤矸石堆积 (9)D题钻井布局(同 B 题) (9)2000网易杯全国大学生数学建模竞赛题目 (10)A题 DNA分子排序 (10)B题钢管订购和运输 (12)C题飞越北极 (15)D题空洞探测 (15)2001年全国大学生数学建模竞赛题目 (17)A题血管的三维重建 (17)B题公交车调度 (18)C题基金使用计划 (20)D题公交车调度 (20)2002高教社杯全国大学生数学建模竞赛题目 (21)A题车灯线光源的优化设计 (21)B题彩票中的数学 (21)C题车灯线光源的计算 (23)D题赛程安排 (23)2003高教社杯全国大学生数学建模竞赛题目 (24)A题 SARS的传播 (24)B题露天矿生产的车辆安排 (28)C题 SARS的传播 (29)D题抢渡长江 (30)2004高教社杯全国大学生数学建模竞赛题目 (31)A题奥运会临时超市网点设计 (31)B题电力市场的输电阻塞管理 (35)C题饮酒驾车 (39)D题公务员招聘 (39)2005高教社杯全国大学生数学建模竞赛题目 (42)A题: 长江水质的评价和预测 (42)B题: DVD在线租赁 (43)C题雨量预报方法的评价 (44)D题: DVD在线租赁 (45)2006高教社杯全国大学生数学建模竞赛题目 (46)A题: 出版社的资源配置 (46)B题: 艾滋病疗法的评价及疗效的预测 (46)C题: 易拉罐形状和尺寸的最优设计 (47)D题: 煤矿瓦斯和煤尘的监测与控制 (48)2007高教社杯全国大学生数学建模竞赛题目 (53)A题:中国人口增长预测 (53)2008高教社杯全国大学生数学建模竞赛题目 (56)A题数码相机定位 (56)B题高等教育学费标准探讨 (57)C题地面搜索 (57)2009高教社杯全国大学生数学建模竞赛题目 (59)A题制动器试验台的控制方法分析 (59)B题眼科病床的合理安排 (60)C题卫星和飞船的跟踪测控 (61)D题会议筹备 (61)2010全国高教社杯数学建模题目 (65)A题储油罐的变位识别与罐容表标定 (65)B题 2010年上海世博会影响力的定量评估 (66)A题最优捕鱼策略为了保护人类赖以生存的自然环境,可再生资源(如渔业、林业资源)的开发必须适度.一种合理、简化的策略是,在实现可持续收获的前提下,追求最大产量或最佳效益.考虑对某种鱼(鳀鱼)的最优捕捞策略:假设这种鱼分四个年龄组,称1龄鱼,…,4龄鱼,各年龄组每条鱼的平均重量分别为 5.07,11.55,17.86,22.99(g),各年龄组鱼的自然死亡率为0.8(1/年),这种鱼为季节性集产卵繁殖,平均每条4龄鱼的产卵量为1.109× (个),3龄鱼的产卵量为这个数的一半,2龄鱼和1龄鱼不产卵,产卵和孵化期为每年的最后4个月,卵孵化并成活为1龄鱼,成活率(1龄鱼条数与产卵总量n之比)为1.22× /(1.22× +n).渔业管理部门规定,每年只允许在产卵孵化期前的8个月内进行捕捞作业.如果每年投入的捕捞能力(如渔船数﹑下网次数等)固定不变,这时单位时间捕捞量与各年龄组鱼群条数成正比,比例系数不妨称捕捞强度系数.通常使用13mm网眼的拉网,这种网只能捕3龄鱼和4龄鱼,其两个捕捞强度系数之比为0.42:1.渔业上称这种方式为固定努力量捕捞.1)建立数学模型分析如何实现可持续捕获(即每年开始捕捞时鱼场中各年龄组鱼群不变),并且在此前提下得到最高的年收获量(捕捞总重量).2)某渔业公司承包这种鱼的捕捞业务5年,合同要求5年后鱼群的生产能力不能受到太大破坏. 已知承包时各年龄组鱼群的数量分别为:122,29.7,10.1,3.29(×条),如果任用固定努力量的捕捞方式,该公司应采取怎样的策略才能使总收获量最高.(北京师范大学刘来福提供)B题节水洗衣机我国淡水资源有限,节约用水人人又责,洗衣在家庭用水中占有相当大的份额,目前洗衣机已相当普及,节约洗衣机用水十分重要.假设在放入衣服和洗涤剂后洗衣机的运行过程为:加水-漂水-脱水-加水-漂洗-脱水-…-加水-漂洗-脱水(称"加水-漂洗-脱水"为运行一轮).请为洗衣机设计一种程序(包括运行多少轮﹑每轮加水量等),使得在满足一定洗涤效果的条件下,总用水量最少.选用合理的数据进行计算,对照目前常用的洗衣机的运行情况,对你的模型和结果做出评价.A题零件的参数设计一件产品由若干零件组装而成,标志产品性能的某个参数取决于这些零件的参数。
基于几何映射关系的数码相机定位模型的研究

第 4 卷 O
M A a k i TAN x n DONG a y a e 1 Yu n u , Ii i g, Yu n u n, t a .Re e r h s ac
B 一
~
△ . △ △ z △ 一 z , l
J
+ 缸 棚l
() 1 2
o i t a r cl rt n J . ueadA pi te t n g a c a a bai [ ] P r n p ldMahma d P l me i o i e —
1 本文采用相机定标研究的基本模 型一 针孔模 型。
2 2 1 图像 坐 标 系 ..
0 .
相机采集 的数字 图像 在
l l
l ! I
.
计算机内可以存储为数组, 数组中的每一个像素值即是
就是几何的点)并 用相机对 其照相 , 后利用 靶标 上这些 , 然 圆的像 的坐标得 到圆心 的像 的坐标 , 利用透 镜成像原理 , 建
标 ( u 弘,)相 比的平均值 : X
( ‰
. .
[]陈琳, 6 陈祥 , 段晓威 , 双 目定位在数码相 机 图像标定 中的应 等.
用[]计算机与数字工程 ,09 3 (2 :5— 5. J. 20 ,7 1 )1 517
is 2 l , 7 5 : 0 — 1 c , 0 2 ( ) 7 5 7 O. 1 1 】
C — z r Ay 一 z Ay  ̄o  ̄ J x ̄ o
[] 文涛 , 3李 马钺. 基于智能相机 的目标物体的定位 [] 控制工程 , J.
2 1 1 S1 : 0 7 . 01 , 8( ) 7 1
Trn fr t n[ ] Ju nlo h n h iUnv ri fE g— asomai J . o ra fS a g a o ies yo n i t
2008全国数学建模竞赛A题一等奖论文

基于切线特征的数码相机定位摘要本文依据成像原理,通过应用图像处理和物、像的不变性质来确定坐标。
采用了几何线性定标模型来标定相机的相对位置。
对于问题一,本文建立了基于图像处理的圆心搜索模型,模型在对公切线定点可行性的论证基础上,建立了图像圆心搜索算法,从而确定靶标上圆的圆心在该相机像平面的像坐标。
对于问题二,运用了Matlab技术对具体图像进行去噪处理,按照圆心搜索算法对任一个圆相对其余各圆求解圆心在像坐标上的多个估计值,计值求均值消除误差后作为圆通过相机拍摄试验分别找到不同相机分辨力不同角度下的相片对其处理,检验三个圆心两两连线的夹角,得到误差偏角。
误差偏角的均值反应了模型的精度,方差变化影响稳定性。
这里求得误差偏角的均值在0.02,方差在0.002以内。
对于问题四,建立几何线性定位模型,得到两个相机的外部参数。
通过两个相机外部参数求解得到两个相机间的旋转矩阵,平移向量及距离见正文表6。
关键词:几何模型算法切线几何线性定标数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
该方法的基本思想是首先用两部固定于不同位置的相机摄得物体的像,分别获得物体上一个特征点在两部相机像平面上的坐标;然后根据两部相机精确的相对位置,利用几何的知识确定该点的位置。
对于双目定位,精确地标定两部相机的相对位置就是关键。
标定的一种方法是设计一个靶标,靶标可以由若干个圆组成,同时用这两部相机照相,分别得到各圆圆心在他们像平面的像点,根据像点的几何关系就可以得到这两部相机的相对位置。
现在设计靶标如下:取1个边长为100mm 的正方形,分别以四个顶点(对应为A 、C 、D 、E )为圆心,12mm 为半径作圆。
以AC 边上距离A 点30mm 处的B 为圆心,半径作圆。
同时给定了一部固定相机所摄的像。
现就相机定位理论以及给定的靶标解决以下几个问题:1.建立数学模型和算法以确定靶标上圆的圆心在该相机像平面的像坐标, 这里坐标系原点取在该相机的光学中心,y x -平面平行于像平面;2.根据问题给出的靶标及其像,计算靶标上圆的圆心在像平面上的像坐标, 该相机的像距(即光学中心到像平面的距离)是1577个像素单位(1毫米约为3.78个像素单位),相机分辨率为1024×768;3.设计一种方法检验你们的模型,并对方法的精度和稳定性进行讨论;4.建立用此靶标给出两部固定相机相对位置的数学模型和方法。
matlab相机标定公式

matlab相机标定公式一、相机成像模型基础。
1. 针孔成像模型。
- 在理想的针孔成像模型中,空间中的一点P(X,Y,Z)在图像平面上的成像点p(x,y)满足相似三角形的关系。
设相机光心为O,成像平面到光心的距离为f(焦距)。
- 根据相似三角形原理,有:- x = f(X)/(Z)- y = f(Y)/(Z)- 这里的坐标都是在相机坐标系下的,实际应用中还需要将其转换到像素坐标系。
2. 从相机坐标系到像素坐标系的转换。
- 从相机坐标系到图像坐标系(以成像平面的中心为原点,单位为毫米等实际长度单位),存在一个比例因子和一个平移量。
设图像坐标系下的坐标为(x',y'),相机坐标系下为(X_c,Y_c,Z_c)。
- 有:x'=(x)/(dx)+u_0,y'=(y)/(dy)+v_0,其中dx和dy是x和y方向上每个像素对应的实际物理长度(例如毫米/像素),(u_0,v_0)是图像坐标系原点(光轴与成像平面交点)在像素坐标系下的坐标。
- 综合起来,从相机坐标系到像素坐标系的转换关系为:- u=(f_xX_c)/(Z_c)+u_0- v=(f_yY_c)/(Z_c)+v_0,其中f_x = f/dx,f_y = f/dy。
二、相机标定中的内外参数。
1. 内参数矩阵。
- 内参数矩阵K包含了相机内部的参数,对于一个针孔相机模型,内参数矩阵的形式为:- K=begin{bmatrix}f_x0u_0 0f_yv_0 001end{bmatrix}- 其中f_x,f_y,u_0,v_0如前面所定义,这些参数描述了相机内部的成像特性,如焦距(以像素为单位)和图像中心位置。
2. 外参数矩阵。
- 外参数矩阵描述了相机坐标系与世界坐标系之间的关系。
它由旋转和平移两部分组成。
- 设世界坐标系下一点P_w(X_w,Y_w,Z_w),相机坐标系下为P_c(X_c,Y_c,Z_c)。
- 首先是旋转关系,用旋转矩阵R表示,它是一个3×3的正交矩阵,表示世界坐标系到相机坐标系的旋转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一问题的提出
1.1背景
数码相机定位在交通监管(电子警察)等方面有广泛的应用。
所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。
最常用的定位方法是双目定位,即用两部相机来定位。
对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。
只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定。
标定的一种做法是:在一块平板上画若
干个点,同时用这两部相机照相,分别得到
这些点在它们像平面上的像点,利用这两组
像点的几何关系就可以得到这两部相机的
相对位置。
然而,无论在物平面或像平面上
我们都无法直接得到没有几何尺寸的“点”。
实际的做法是在物平面上画若干个圆(称为
靶标),它们的圆心就是几何的点了。
而它
们的像一般会变形,如图1所示,所以必须
从靶标上的这些圆的像中把圆心的像精确
地找到,标定就可实现。
图 1 靶标上圆的像
有人设计靶标如下,取1个边长为100mm的正方形,分别以四个顶点(对应为A、C、D、E)为圆心,12mm为半径作圆。
以AC边上距离A点30mm处的B为圆心,12mm为半径作圆,如图2所示。
用一位置固定的数码相机摄得其像,如图3所示。
图 2 靶标示意图图3 靶标的像
1.2问题
(1)建立数学模型和算法以确定靶标上圆的圆心在该相机像平面的像坐标, 这里坐标系原点取在该相机的光学中心,x-y平面平行于像平面;
(2)对由图2、图3分别给出的靶标及其像,计算靶标上圆的圆心在像平面上的像坐标, 该相机的像距(即光学中心到像平面的距离)是1577个像素单位(1毫米约为3.78个像素单位),相机分辨率为1024×768;
(3)设计一种方法检验你们的模型,并对方法的精度和稳定性进行讨论;(4)建立用此靶标给出两部固定相机相对位置的数学模型和方法。
二问题的假设
1.考虑光的衍射,色散,只考虑反射和折射;
2.假设所有场景中感兴趣的点都在镜头前面;
3.将相机简化为一个小孔成像机构,对于产生的相差,以及相机对像平面成像的调整作用不予考虑;
4.像平面是由一个个有大小的像素点组成,是一个不连续的点空间,而几何定义大都是在连续空间内定义的,这里假定,在几何推理中,像平面是连续的面,也即每个象素点除了表示坐标外,不再具有实际的大小;
5.为了在离散空间中求解,在解答过程中对相切、相割的含义做了一些调整,具体论述见正文;
6.对于题中随给相机中的几何关系有如下描述:焦点,透镜中心,像平面中点三点共
三符号说明
四问题分析
问题涉及的是数码相机的定位问题,问题出现在双目定位的背景下,要解决的问题是如何实现物体表面某些特征点在物平面和像平面之间的坐标转换,其中如何在像平面中找到发生变形的靶标(圆)像的圆心是需要解决的核心问题。
4.1 基本思路
题目中给出了已经得到的靶标的像和一些可测量的参数,如相机的像距,分辨率及靶标圆的半径和各圆之间的相对位置等。
精确确定两部相机的相对位置是最终目的;实现物体表面某些特征点在物平面和像平面之间的坐标转换,是解决问题的基础;而像的变形决定了找到圆心在像上的投影是问题的核心也是难点。
我们考虑先找出实现物体表面某些特征点在物平面和像平面之间的坐标转换的方法,在此基础上找到靶标圆心在像平面上的圆心的具体位置,然后通过坐标转换,把空间点从图像中恢复出来,最后根据两次恢复中求出的空间点位置的不一致关系,通过坐标系转换推出两部相机的相对位置。
4.2 具体分析
问题1需要确定靶标上圆的圆心在相机像平面的像坐标。
有两种方法可以考虑实现,第一是利用物与像之间某些不变的相对位置关系找到对应与圆心的像点;另一种方法就是借助计算机图形处理中的霍夫变换和聚类算法在一定模型假设基础上求解。
问题2主要是模型的求解。
根据问题一中得到的模型和算法,具体的编制程序进
行实现,具体用到的有matlab帮助求解。
问题3是对问题1中的模型以及模型2中的计算结果的检验。
我们考虑通过在三维空间内寻找另外一个摄影角度,数码相机在此角度可以得到图2的另外一个像,同时可以出在像平面内圆心的靶标的像坐标。
利用问题1的模型和算法求得的圆心坐标与之进行比较,如果圆心坐标可以重合的很好,说明模型的精度比较好;同时在本文中我们还对模型和算法的精度进行了初步的讨论。
问题4是需要找出可以确定两部固定相机相对位置的方法。
我们借助该靶标在两部相机的像平面中所成的像,求出其在像平面中的坐标,并通过逆变换,把空间点从像平面的二维图像中恢复到三维坐标系中,通过两次恢复得到的坐标之间的不一致关系确定出两部相机相对位置。
五模型的建立与求解
1前期像图的转换处理
在本问题中,像平面是一个二维空间,相应的像素值即为空间内各点的横纵坐标。
在图像平面坐标系统中。
首先,我们通过边缘检测的方法确定靶标在像平面中各个圆像的边界。
即通过检测每个像素和其直接邻域点灰度是否连续,以决定该像素是否确实处于一个物体的边界上。
因此,我们需要将像平面图转化为二维灰度图,当图像中各个像素的灰度发生很大的跳跃产生不连续时,这时出现像的边界,同时记下边界在相图平面中的坐标。
两个具有不同灰度值的相邻区域之间总存在边缘,边缘是灰度值不连续的结果。
边缘检测的基本思想是利用边缘增强算子,突出图像中的局部边缘,然后定义像素的“边缘强度”,通过设置门限的方法提取边缘点集。
具体操作步骤如下:
1:把二维像图读入MATLAB的变量中;
2:提取靶标图像的边界——确定边缘的方法
3:靶标图像的边界是由若干个点组成的,各点坐标可以通过读取图像的过程获得。
常用的边缘检测算子有很多种,我们使用Sobel算子、Robert算子、Prewitt算子、LOG算子、Canny算子和Zerocross算子对图3中的靶标图像进行边缘检测和确定,结果如图。
通过不同算子边缘提取效果比较,Sobel算子的效果最好,Zerocross 效果最差,我们最终确定选用Sobel算子进行靶标像图的边缘检测,然后提取出图像的边界。
通过边缘检测和边界提取,我们将图像从二维转化为边界线离散点,实质上是一个降维操作过程,有利于模型的简化,同时减小计算量,提高运行速度。
问题1的分析
在问题1中需要对像平面和世界坐标系中求图像圆心坐标。
如图7所示,像平面的中心O’是像平面的像素坐标的原点位置,而像距是焦点到像平面距离,焦点在OO’这条线上,同时x-y平面平行于像平面。
因此,问题转化为求在像平面坐标系中靶标圆心的像坐。