单轮机器人 翻译剖析
Robots机器人 中英文翻译
RobotsA robot is an automatically controlled, reprogrammable, multipurpose, mani pulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements.The term”reprogrammabl e” implies two things:The robot operates according to a written program can b e rewritten to accomdate a variety of manufacturing tasks. The term “multipurp ose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades,the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can per form certain basic tasks more quickly and accurately than humans, they are bei ng increasingly used in various manufacturing industries.Structures of RobotsThe typical structure of industrial robots consists of 4 major components: the manipulator, the end effector, the power supply and control syterm.The manipulator is a mechanical unite that provides motions similar to those of a human arm. It often has a shoulder joint,an elbow and a wrist. It can rotate or slide, strech out and withdraw in every possible direction with certain flexibility.The basic mechanical configurations of the robot manipulator are categorized as Cartesian, cylindrical, spherical and articulated.A robot with a Cartesian geometry can move its gripper to any position within the cube or rectangle defined as its working volum.Cylindrical coordinate robots can move the gripper within a volum that is described by a cylinder. The cylindrical coordinate robot is positioned in the work area by two linear movements in the X and Y directions and one angular rotation about the Z axis.Spherical arm geometry robots have an irregular work envelop. This type of robot has two main variants,vertically articulated and horizontally articulated.The end effector attaches itself to the end of the robot wrist, also called end-of-arm tooling.It is the device intended for performing the designed operations as a human hand can.End effectors are generally custom-made to meet special handling requirements. Mechanical grippers are the most commonly used and are equipped with two or more fingers.The selection of an appropriate end effector for a special application depends on such factors as the payload, enviyonment,reliability,and cost.The power supply is the actuator for moving the robot arm, controlling the joints and operating the end effector. The basic type of power sources include electrical,pneumatic, and hydraulic. Each source of energy and each type of motor has its own characteristics, advantages and limitations. An ac-powered motor or dc-powered motor may be used depending on the system design and applications. These motors convert electrical energy into mechanical energy to power the robot.Most new robots use electrical power supply. Pneumatic actuators have been used for high speed. Nonservo robots and are often used for powering tooling such as grippers. Hydraulic actuators have been used for heavier lift systems, typically where accuracy was not also requied.The contro system is the communications and information-processing system that gives commands for the movements of the robot. It is the brain of the robot; it sends signals to the power source to move the robot arm to a specific position and to the end effector.It is also the nerves of the robot; it is reprogrammable to send out sequences of instructions for all movements and actions to be taken by the robot.A open-loop controller is the simplest for of the control system, which controls the robot only by foolowing the predetermined step-by-step instructions.This system dose not have a self-correcting capability.A close-loop control system use feedback sensors to produce signals that reflct the current states of the controed objects. By comparing those feedback signals with the values set by the programmer, the close-loop controller can conduct the robot to move to the precise position and assume the desired attitude, and the end effector can perform with very high accuracy as the close-loop control system can minimize the discrepancy between the controlled object and the predetermined references.Classification of RobotIndustrial robots vary widely in size,shape, number of axes,degrees of freedom, and design configuration. Each factor influence the dimensions of the robot’s working envelop or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are form point to point, and the cycle is repeated continuously.The variable-sequence robot can be programmed for a specific sequence of operations but can be programmed to perform another sequence of operation.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servocontrolled by digital data, and its sequence of movements can be changed with relative ease.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by huanbeings.It is equipped with a variety of sensors with visual and tactile capabilities.Robot ApplicationsThe robot is a very special type of productin tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use tools to process the raw material. For example, the robot tools could include a drill and the robot would be able to perfor drilling operaytions on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed relatively and repeatedly with robots, thereby improving quality and scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concers.机器人机器人是一种自动控制的、可重复编程的、多功能的、由几个可重复编程的坐标系来操纵机器的装置,它可以被固定在某地,还可以是移动的以在工业自动化工厂中使用。
机器翻译与人工翻译的比较与展望

2512020年36期总第528期ENGLISH ON CAMPUS机器翻译与人工翻译的比较与展望文/张 敏现的频率,选取频率最高者进行译文的输出。
这一翻译模式劣势在于它忽略了语言的灵活性以及语境的重要性。
神经网络语言模型。
该模式与以往的翻译模式有所区别,其基本思路是运用端到端的神经网络实现自然语言间的自动转换。
就目前状况来看,其译文质量要远高于前几种翻译模式。
二、机器翻译与人工翻译的比较1.共性比较。
(1)本质相同。
无论是机器翻译还是人工翻译,二者皆具有相同的本质,那就是将一种语言所传递的信息和感受通过另一种语言向目的语读者进行传达,并尽可能地让目的语读者获得与源语读者相同的信息与感受。
(2)目的相同。
机器翻译与人工翻译殊途同归,无非是希望能够消除或是减少国与国、人与人之间沟通交流的障碍和壁垒,最终达到方便于人,促进社会发展的作用。
2.差异比较。
(1)对于语境、文化差异的处理。
就非文学文本而言,语境对词语的选择有着十分重要的影响。
人工翻译可以通过对语境的解读,对平行文本的参照选择最恰当的用词,而机器翻译目前还做不到对于语境的深入分析,这也是机器翻译质量屡遭诟病的原因之一。
就文学文本而言,翻译不仅仅是简单地将一种语言转换为另一种语言,还是要将语言所承载的文化一并展示给读者。
面对文学作品中涉及的种种文化差异,例如各个国家的历史传统、神话故事、民族特色、民间习俗等,机器翻译目前的引言世界各国交流中出现的语言障碍逐渐凸显,而翻译作为解决这一障碍的桥梁,其需求与地位不言而喻。
然而日渐庞大的翻译市场,与为数不多的合格译者形成了鲜明的对比。
近年来,机器翻译的出现和发展使得这一紧张局面得到了很大程度上的缓解,机器翻译也因此备受大众关注。
本文旨在对机器翻译和人工翻译进行简要比较,而由于人工翻译历史悠久,大众对人工翻译的认识也比较普遍,因此在此不作赘述,只重点对人们还不是十分了解的机器翻译作简单介绍。
一、机器翻译1.机器翻译定义。
机器人外文翻译(文献翻译-中英文翻译)

外文翻译外文资料:RobotsFirst, I explain the background robots, robot technology development. It should be said it is a common scientific and technological development of a comprehensive results, for the socio-economic development of a significant impact on a science and technology. It attributed the development of all countries in the Second World War to strengthen the economic input on strengthening the country's economic development. But they also demand the development of the productive forces the inevitable result of human development itself is the inevitable result then with the development of humanity, people constantly discuss the natural process, in understanding and reconstructing the natural process, people need to be able to liberate a slave. So this is the slave people to be able to replace the complex and engaged in heavy manual labor, People do not realize right up to the world's understanding and transformation of this technology as well as people in the development process of an objective need. Robots are three stages of development, in other words, we are accustomed to regarding robots are divided into three categories. is a first-generation robots, also known as teach-type robot, it is through a computer, to control over one of a mechanical degrees of freedom Through teaching and information stored procedures, working hours to read out information, and then issued a directive so the robot can repeat according to the people at that time said the results show this kind of movement again, For example, the car spot welding robots, only to put this spot welding process, after teaching, and it is always a repeat of a work It has the external environment is no perception that the force manipulation of the size of the work piece there does not exist, welding 0S It does not know, then this fact from the first generation robot, it will exist this shortcoming, it in the 20th century, the late 1970s, people started to study the second-generation robot, called Robot with the feeling that This feeling with the robot is similar in function of a certain feeling, forinstance, force and touch, slipping, visual, hearing and who is analogous to that with all kinds of feelings, say in a robot grasping objects, In fact, it can be the size of feeling out, it can through visual, to be able to feel and identify its shape, size, color Grasping an egg, it adopted a acumen, aware of its power and the size of the slide. Third-generation robots, we were a robotics ideal pursued by the most advanced stage, called intelligent robots, So long as tell it what to do, not how to tell it to do, it will be able to complete the campaign, thinking and perception of this man-machine communication function and function Well, this current development or relative is in a smart part of the concept and meaning But the real significance of the integrity of this intelligent robot did not actually exist, but as we continued the development of science and technology, the concept of intelligent increasingly rich, it grows ever wider connotations.Now, I would like to briefly outline some of the industrial robot situation. So far, the industrial robot is the most mature and widely used category of a robot, now the world's total sales of 1.1 million Taiwan, which is the 1999 statistics, however, 1.1 million in Taiwan have been using the equipment is 75 million, this volume is not small. Overall, the Japanese industrial robots in this one, is the first of the robots to become the Kingdom, the United States have developed rapidly. Newly installed in several areas of Taiwan, which already exceeds Japan, China has only just begun to enter the stage of industrialization, has developed a variety of industrial robot prototype and small batch has been used in production.Spot welding robot is the auto production line, improve production efficiency and raise the quality of welding car, reduce the labor intensity of a robot. It is characterized by two pairs of robots for spot welding of steel plate, bearing a great need for the welding tongs, general in dozens of kilograms or more, then its speed in meters per second a 5-2 meter of such high-speed movement. So it is generally five to six degrees of freedom, load 30 to 120 kilograms, the great space, probably expected that the work of a spherical space, a high velocity, the concept of freedom, that is to say, Movement is relatively independent of the number of components, the equivalent of our body, waist is a rotary degree of freedom We have to be able to hold his arm, Arm can be bent, then this three degrees of freedom, Meanwhile there is a wristposture adjustment to the use of the three autonomy, the general robot has six degrees of freedom. We will be able to space the three locations, three postures, the robot fully achieved, and of course we have less than six degrees of freedom. Have more than six degrees of freedom robot, in different occasions the need to configure.The second category of service robots, with the development of industrialization, especially in the past decade, Robot development in the areas of application are continuously expanding, and now a very important characteristic, as we all know, Robot has gradually shifted from manufacturing to non-manufacturing and service industries, we are talking about the car manufacturer belonging to the manufacturing industry, However, the services sector including cleaning, refueling, rescue, rescue, relief, etc. These belong to the non-manufacturing industries and service industries, so here is compared with the industrial robot, it is a very important difference. It is primarily a mobile platform, it can move to sports, there are some arms operate, also installed some as a force sensor and visual sensors, ultrasonic ranging sensors, etc. It’s surrounding environment for the conduct of identification, to determine its campaign to complete some work, this is service robot’s one of the basic characteristics.For example, domestic robot is mainly embodied in the example of some of the carpets and flooring it to the regular cleaning and vacuuming. The robot it is very meaningful, it has sensors, it can furniture and people can identify, It automatically according to a law put to the ground under the road all cleaned up. This is also the home of some robot performance.The medical robots, nearly five years of relatively rapid development of new application areas. If people in the course of an operation, doctors surgery, is a fatigue, and the other manually operated accuracy is limited. Some universities in Germany, which, facing the spine, lumbar disc disease, the identification, can automatically use the robot-aided positioning, operation and surgery Like the United States have been more than 1,000 cases of human eyeball robot surgery, the robot, also including remote-controlled approach, the right of such gastrointestinal surgery, we see on the television inside. a manipulator, about the thickness fingers such a manipulator, inserted through the abdominal viscera, people on the screen operating the machines hand, it also used the method of laser lesion laser treatment, this is the case, peoplewould not have a very big damage to the human body.In reality, this right as a human liberation is a very good robots, medical robots it is very complex, while it is fully automated to complete all the work, there are difficulties, and generally are people to participate. This is America, the development of such a surgery Lin Bai an example, through the screen, through a remote control operator to control another manipulator, through the realization of the right abdominal surgery A few years ago our country the exhibition, the United States has been successful in achieving the right to the heart valve surgery and bypass surgery. This robot has in the area, caused a great sensation, but also, AESOP's surgical robot, In fact, it through some equipment to some of the lesions inspections, through a manipulator can be achieved on some parts of the operation Also including remotely operated manipulator, and many doctors are able to participate in the robot under surgery Robot doctor to include doctors with pliers, tweezers or a knife to replace the nurses, while lighting automatically to the doctor's movements linked, the doctor hands off, lighting went off, This is very good, a doctor's assistant.Robot is mankind's right-hand man; friendly coexistence can be a reliable friend. In future, we will see and there will be a robot space inside, as a mutual aide and friend. Robots will create the jobs issue. We believe that there would not be a "robot appointment of workers being laid off" situation, because people with the development of society, In fact the people from the heavy physical and dangerous environment liberated, so that people have a better position to work, to create a better spiritual wealth and cultural wealth.译文资料:机器人首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
移动机器人——独轮机器人研究综述

下2个用铰链关节连接的部分。由于其轮子很宽大,因此基本不存在侧向平衡的问题。
• 2005年卡内基梅隆大学的研究者Lauwers 等研制与独轮机器人很类似的机器人称为独轮球机器人, 它将独轮机器人的轮子换成的一个可朝任意方向滚动的球 • 2007 年,美国加州大学圣地亚哥分校研制成功一款名为UniBot 的SWR,利用极点配置算法控制上端
2005年卡内基梅隆大学的研究者lauwers等研制与独轮机器人很类似的机器人称为独轮球机器人它将独轮机器人的轮子换成的一个可朝任意方向滚动的球2007年美国加州大学圣地亚哥分校研制成功一款名为unibot的swr利用极点配置算法控制上端的竖直飞轮和下端的一个行走轮成功地实现了自身的平衡2008年日本村田制作所推出了名为村田少女的独轮车机器人该机器人通过转动机器人体内配备的惯性轮保持侧向平衡而前向平衡则通过机器人的车轮来控制难题平衡目前干扰卡尔曼滤波非线性线性化微分几何滑膜控制俯仰横滚航向之间耦合解耦控制静态不稳定动平衡mimo系统角度角速度位置速度反馈动力学建模方法牛顿欧拉法受力分析拉格朗日方程劳斯方程基于能量计算量大凯恩法非完整性系统矢量运算计算量小有递推公式方便计算水平飞轮容易转向竖直飞轮容易平衡陀螺仪结构橄榄球形状球形结构控制策略神经网络反演迭代学习控制中国进展
的竖直飞轮和下端的一个行走轮,成功地实现了自身的平衡
• 2008 年,日本村田制作所推出了名为“村田少女”的独轮车机器人,该机器人通过转动机器人体内 配备的惯性轮保持侧向平衡, 而前向平衡则通过机器人的车轮来控制
难题 -> 平衡(目前)
• 建模复杂
拉格朗日法、凯恩法
• 干扰
卡尔曼滤波
• 欠驱动或不稳定 • 非线性
电气控制结构
参考文献
机器人的英语单词
机器人的英语单词机器人在当今世界中扮演着越来越重要的角色,他们有助于帮助我们完成各种各样的任务,使我们的生活变得更加便捷舒适。
为了使机器人可以更好地为我们服务,研发者们需要将英语知识灌输给他们。
因此,本文将探讨机器人的英语单词,以及机器人如何使用这些单词。
首先,让我们来看看机器人最常使用的英语单词。
其中,最常用的单词当属“robot”。
“Robot”是机器人的英语翻译,它可以指统治机器人,诸如机械人、服务机器人、无人机等多种自动装置。
此外,机器人还会使用“sensor”、“actuator”、“control”、“command”等技术词汇。
“Sensor”指的是机器人用来检测周围环境的传感器。
“Actuator”是机器人用于运动控制的执行器,可以让机器人完成某些动作。
“Control”指的是机器人的控制系统,机器人的所有动作都需要根据控制系统的输出进行控制。
最后,“command”指的是机器人的指令,机器人可以根据指令来完成相应的任务。
此外,机器人还会使用一些抽象的英语单词。
例如,机器人会使用“ logic”、“ positioning”、“ decision”、“output”等词汇。
“Logic”是机器人使用的逻辑系统,它让机器人有能力考虑复杂的环境问题,并根据它们的逻辑判断来决定下一步行动。
“Positioning”是机器人的定位系统,机器人可以通过定位系统获取周围的位置信息,以便更好地完成任务。
“Decision”是机器人的决策系统,它可以帮助机器人根据当前环境进行正确的决策。
最后,“Output”是机器人执行任务后的输出,它可以用来表明机器人执行任务的效果。
最后,机器人还会使用一些行业词汇。
这些专业词汇包括机器人技术,例如“robotics”、“artificial intelligence”、“machine vision”、“image recognition”等。
“Robotics”是指机器人技术,它可以帮助机器人完成各种各样的任务。
中英文翻译机器人
中英文翻译机器人机器人工业机器人是在生产环境中用以提高生产效率的工具,它能做常规的装配线工作,或能做那些对于工人来说是危险的工作,例如,第一代工业机器人是用来在核电站中更换核燃料棒,如果人去做这项工作,将会遭受有害放射线的辐射。
工业机器人亦能工作在装配线上将小元件装配到一起,如将电子元件安装在电路印刷板,这样,工人就能从这项乏味的常规工作中解放出来。
机器人也能按程序要求用来拆除炸弹,辅助残疾人,在社会的很多应用场合履行职能。
机器人可以认为是将手臂末端的工具、传感器和(或)手爪移到程序指定位置的一种机器。
当机器人到达位置后,他将执行某种任务。
这些任务可以是焊接、密封、机器装料、拆卸以及装配工作。
除了编程以及系统的开停之外,这些工作可以在无人干预下完成。
如下叙述的是机器人系统基本术语:机器人是一个可编程、多功能的机器手,通过给要完成的不同任务编制各种动作,它可以移动零件、材料、工具以及特殊装置。
这个基本定义引导出后续段落的其他定义,从而描绘出一个完整的机器人系统。
预编程位置点是机器人为完成工作而必须跟踪的轨迹。
在某些位置点上机器人将停下来做某写操作,如装配零件、喷涂油漆或焊接。
这些预编程点贮存在机器人的贮存器中,并为后续的连续操作所调用,而且这些预编程点像其他程序数据一样,可在日后随工作需要而变化。
因而,正是这种可编程的特征,一个工业机器人很像一台计算机,数据可在这里储存、后续调用与编辑。
机械手上机器人的手臂,它使机器人能弯曲、延伸、和旋转,提供这些运动的是机器手的轴,亦是所谓的机器人的自由度。
一个机器人能有3—16 轴,自由度一词总是与机器人轴数相关。
工具和手爪不是机器人自身组成部分,但它们安装在机器人手臂末端的附件。
这些连在机器人手臂末端的附件可使机器人抬起工件、点焊、刷漆、电弧焊、钻孔、打毛刺以及根据机器人的要求去做各种各样的工作。
机器人系统还可以控制机器人的工作单元,工作单元是机器人执行任务所处的整体环境,包括控制器、机械手、工作平台、安全保护装置或者传输装置。
机器人外文翻译(中英文翻译)
机器人外文翻译(中英文翻译)机器人外文翻译(中英文翻译)With the rapid development of technology, the use of robots has become increasingly prevalent in various industries. Robots are now commonly employed to perform tasks that are dangerous, repetitive, or require a high level of precision. However, in order for robots to effectively communicate with humans and fulfill their intended functions, accurate translation between different languages is crucial. In this article, we will explore the importance of machine translation in enabling robots to perform translation tasks, as well as discuss current advancements and challenges in this field.1. IntroductionMachine translation refers to the use of computer algorithms to automatically translate text or speech from one language to another. The ultimate goal of machine translation is to produce translations that are as accurate and natural as those generated by human translators. In the context of robots, machine translation plays a vital role in allowing them to understand and respond to human commands, as well as facilitating communication between robots of different origins.2. Advancements in Machine TranslationThe field of machine translation has experienced significant advancements in recent years, thanks to breakthroughs in artificial intelligence and deep learning. These advancements have led to the development of neural machine translation (NMT) systems, which have greatly improved translation quality. NMT models operate by analyzinglarge amounts of bilingual data, allowing them to learn the syntactic and semantic structures of different languages. As a result, NMT systems are capable of providing more accurate translations compared to traditional rule-based or statistical machine translation approaches.3. Challenges in Machine Translation for RobotsAlthough the advancements in machine translation have greatly improved translation quality, there are still challenges that need to be addressed when applying machine translation to robots. One prominent challenge is the variability of language use, including slang, idioms, and cultural references. These nuances can pose difficulties for machine translation systems, as they often require a deep understanding of the context and cultural background. Researchers are currently working on developing techniques to enhance the ability of machine translation systems to handle such linguistic variations.Another challenge is the real-time requirement of translation in a robotic setting. Robots often need to process and translate information on the fly, and any delay in translation can affect the overall performance and efficiency of the robot. Optimizing translation speed without sacrificing translation quality is an ongoing challenge for researchers in the field.4. Applications of Robot TranslationThe ability for robots to translate languages opens up a wide range of applications in various industries. One application is in the field of customer service, where robots can assist customers in multiple languages, providing support and information. Another application is in healthcare settings, where robots can act as interpreters between healthcare professionals and patientswho may speak different languages. Moreover, in international business and diplomacy, robots equipped with translation capabilities can bridge language barriers and facilitate effective communication between parties.5. ConclusionIn conclusion, machine translation plays a crucial role in enabling robots to effectively communicate with humans and fulfill their intended functions. The advancements in neural machine translation have greatly improved translation quality, but challenges such as language variability and real-time translation requirements still exist. With continuous research and innovation, the future of machine translation for robots holds great potential in various industries, revolutionizing the way we communicate and interact with technology.。
机器人的组成外文翻译

附录外文翻译:机器人的组成(1)hobby engineeringIts easier to learn about building robots if you take it one step at a time. This menu breaks a fairly complex robot into bite-sized pieces (or byte-sized for you programmers) to make the information easier to digest. We think that this is a good way to both learn about robots and to plan your actual construction. If you try to do everything at once you are likely to end up with a mess. If you plan and build in small steps, you are almost guaranteed success.(2)ControllersThe controller is the brains of your computer. The controller receives information from sensors and the input part of the human interface. It then decides what to do and sends instructions to the motion systems, actuators and the output part of the human interface. There are many types of controllers with different amounts of processing power and varying numbers and types of "pins" which connect to sensors, motors and the other part of the robot.In order for your controller or your robot to do anything, you must write a program and load that program into the controller's memory. Depending on your choice of controller, this can be fairly simple or extremely complicated. We recommend controllers using the Parallax Basic Stamp as the starting point for almost everyone. These controllers are programmed in an easy-to-learn language and have an integrated program loading system that is nearly 100% reliable. The Basic Stamp almost guarantees a fast start in programming whereas most alternatives require overcoming a significant level of difficulty just to get started. Even if you intend to "graduate" to more complex programming systems you will probably find the Basic Stamp a useful tool for investigating new ideas before developing your production code.(3)SensorsSensors provide your robot with information about its environment. Different sensors tell your robot about sights, sounds, pressures, temperatures and many other characteristics of the world around it.In many cases sensor components provide "data" when what you want is "information". Forinstance, a sonar component may report that an echo came back in .05ms when what you really want to know is that a robot is charging you from two feet away. In some cases the volume of data from sensor components is more than can be handled by a robot controller -- too much data can be as useless as no data at all. Because of this, many of sensor products are actually "smart" subsystems with specialized logic to evaluate the data stream and simplify programming your robot's main controller.When considering sensors, your first step is to identify what you want your robot to sense and how quickly and reliably you want to acquire that information. While "I want to know everything, right now, without error" sounds like a good specification, it probably isn't achievable and it definitely wouldn't be affordable. All practical sensors have definite limits of accuracy, range, resolution and repeatability. Each little increase in performance requires a large increase in cost so you will often accept what you can afford rather than insist on what you would like.While sensors are warranted to meet their specifications, they aren't guaranteed to do what you want in the way you want. While an IR distance sensor may be 99% accurate in the testing lab, your results may be less perfect in a competitive environment when your sensors may get confused by random reflections, your opponents sensors or even intentional interference. In order to be fully effective, you may need to compare the results from multiple sensors and/or filter the data to ignore results that seem inconsistent. As with every part of your robot, maximum effectiveness requires careful evaluation of real-world results and fine-tuning of your robot's circuits and program. This is not a "Plug And Play" hobby!When evaluating sensors, you want to know the following:○1What is actually being measured? For example, most distance sensors don't really measure distance. They measure how long it takes to receive an echo after they send a signal. You have to consider the possibility that the echo" is actually a stray signal and then find a way to eliminate those false readings. Reliable distance tracking systems usually look for patterns of consistent readings○2How many connections of what kind are required to connect the sensor to your controller? Do you have enough of those kinds of pins available on your controller? Does the signal need to be processed though an ADC or other hardware device to be usable by your program?○3How much power does the sensor require and at what voltage(s)? Will you have to increase your robots battery and power regulation capacity?A thorough technical evaluation of a sensor may require more knowledge than you possess. Fortunately, you can generally get good results by relying on common sense and the helpful nature of most other builders. The sensors we offer have all been used successful by builders of varying levels, so you can feel confident that you aren't attempting the impossible when you select one of the sensors we offer. We have tried to write product descriptions that translate the technical specifications into common English (common American to our off-shore friends) -- but keep in mind that something can get lost in any translation. Finally a search of the WEB will find you many examples of circuits and programs. (In the near future we will have our own samples posted with each product description.)(4)Robot Base KitsThe base is your robots skelton and it main functions are to hold all the other parts together and to protect delicate parts from harm. A base can be as simple as a scrap piece of wood or as complicated as a space ship.In many cases the design of the base is completely intertwined with the design of the motion systems. Sometimes the mechanical components for a robot can be "borrowed" from a toy or other hobby. Radio controlled planes, cars and boats (including submarines) have been used to provide the base and motion system of robots.(5)Human Communications SystemsYour robot can "talk" to you via computer generated voice, blinking lights and text displays. It can "listen" to your instructions sent by keyboard, switches or wireless remote control. Computer people prefer to use the word "output" instead of "talk" and "input" instead of "listen", but you know what they mean.(6)ActuatorsAn actuator is any device that makes your robot do something. Motion Systems and the output part of the Human Communications Systems are just specialized actuators which are important enough that we though they deserved their own sections.Actuators can move things or control other devices. Almost any device operated with electricitycan become an actuator. Depending on the device it may be connected directly to the controller or indirectly by an H-Bridge or relay. Your robot can also control things remotely using radio frequency or infrared transmission or even over the internet. The X-10 home control system allows your robot to control household lights and appliances.(7)Motion SystemsRobots are usually moved by a combination of wheels, gears, motors and associated electronics. Sometimes motor systems are assembled piece-by-piece but the most common form of robot motion these days comes from servos similar to the kind used with radio controlled airplanes. While most robots roll, it is possible to build robots that walk, jump or even swim or fly.A continuous rotation servo is a modified hobby servo that can rotate 360 degrees in either direction. These servos are economical and provide a neat system of motors, gears and electronics that can be directly connected to most robot controllers. A number of different types of wheels are available which attach directly to the servo axle. Most simple robots use two servos to provide both motion and direction control. Direction is controlled by what is called "differential steering" -- steering by varying the speed and direction of each wheel. If your robot needs to turn left, just slow or stop the left wheel servo while maintaining or increasing the speed of the right wheel. The bigger the difference in speed, the sharper the turn.Motion systems can become as complicated as you choose and often require custom design and building of the mechanical and electronic components. Sometimes the mechanical components can be "borrowed" from a toy or other hobby. Radio controlled planes, cars and boats (including submarines) have been used to provide the base and motion system of robots.An H-Bridge is an electronic circuit which translates and boosts controller output signals to the level required to drive a standard electric motor with variable speed and direction. An H-Bridge is built into hobby servos, so they can be connected directly to the controller. When using other types of motors you need to provide your own H-Bridge. These can be purchased as completed assemblies or assembled from components.(1)爱好工程如果你采取每次一小步的策略。
机器人外文翻译(中英文翻译)
外文翻译机器人The robot性质: □毕业设计□毕业论文教学院:机电工程学院系别:机械设计制造及其自动化学生学号:学生姓名:专业班级:指导教师:职称:起止日期:机器人1.机器人的作用机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。
在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。
现在,国际上对机器人的概念已经逐渐趋近一致。
一般说来,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。
联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的,用来搬运材料、零件、工具的操作机;或是为了执行不同的任务而具有可改变和可编程动作的专门系统。
2.能力评价标准机器人能力的评价标准包括:智能,指感觉和感知,包括记忆、运算、比较、鉴别、判断、决策、学习和逻辑推理等;机能,指变通性、通用性或空间占有性等;物理能,指力、速度、连续运行能力、可靠性、联用性、寿命等。
因此,可以说机器人是具有生物功能的三维空间坐标机器。
3.机器人的组成机器人一般由执行机构、驱动装置、检测装置和控制系统等组成。
执行机构即机器人本体,其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节个数通常即为机器人的自由度数。
根据关节配置型式和运动坐标形式的不同,机器人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。
出于拟人化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持器或末端执行器)和行走部(对于移动机器人)等。
驱动装置是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。
它输入的是电信号,输出的是线、角位移量。
机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。
检测装置的作用是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。
机器人用英语怎么说英文翻译及例句
机器人用英语怎么说英文翻译及例句机器人是指能够自动执行工作的机器装置,如今关于机器人的科技已经越来越发达了,那么你知道机器人用英语怎么说吗?下面跟店铺一起学习机器人的英语知识吧。
机器人英语说法robotautomatonandroid机器人的相关短语智能机器人 intelligent robot ; the robot ; brain bot jr ; IR水下机器人ROV ; underwater robot ; Remote Operated Vehicle ; underwater vehicle机器人战线 Robot Battle Tactics机器人向导 robots机器人劫难 Android Apocalypse ; Android ; Paul Ziller机器人控制技术 Robot Control Technology机器人的英语例句1. Most mobile robots are still in the design stage.大多数移动机器人仍处在设计阶段。
2. The robots have been on trial for the past year.这些机器人过去一年都在试用当中。
3. These cars are built by robots.这些汽车是由机器人制造的。
4. In the story human beings were replaced by robots.在这个故事中,人类被机器人代替了.5. They built a robot capable of understanding spoken commands.他们制造了一个能懂口头指令的机器人.6. Science fiction stories often mention robots that can talk.科幻小说常提到会说话的机器人.7. Robots can relieve people of dull and repetitive work.单调重复的工作,机器人可以代劳.8. She worked like a robot.她工作起来如同一个机器人.9. These robots are capable of shape discrimination.这些机器人能辨别形状.10. The robot is a marvel of modern engineering.机器人是现代工程技术的奇迹.11. Simon's book provides a succinct outline of artificial intelligence and its application to robotics.西蒙的书简明扼要地概括了人工智能及其在机器人技术方面的应用。
机器人英文作文翻译
机器人英文作文翻译英文:Robots have become an integral part of our lives, performing various tasks and assisting us in numerous ways. As a robot, I play a significant role in helping humans with their daily activities, ranging from household chores to complex industrial operations. Let me delve into how I contribute to different aspects of human life.In households, I assist with cleaning tasks such as vacuuming floors, mopping, and doing laundry. For example, I can efficiently navigate through rooms, avoiding obstacles, and ensuring every corner is thoroughly cleaned. Moreover, I can sort and fold laundry with precision, saving humans valuable time and effort. Many families rely on me to maintain cleanliness and order in their homes.In industrial settings, my capabilities are even more pronounced. I can perform tasks that are dangerous ormonotonous for humans, thus ensuring safety and increasing efficiency. For instance, in manufacturing plants, I assemble products with speed and accuracy, reducing the margin of error and enhancing productivity. My precision and consistency make me an invaluable asset in various industries, ranging from automotive to electronics.Moreover, I contribute to healthcare by assisting doctors and nurses in hospitals. I can accurately record and analyze patient data, monitor vital signs, and even assist in surgeries with my precise movements. My presence in healthcare facilities not only improves the quality of care but also reduces the workload on medical staff, allowing them to focus more on patient interaction and treatment.In addition to practical tasks, I also play a role in entertainment and companionship. I can engage in conversations with humans, play games, and even perform tasks such as storytelling or providing information. Many people find comfort and companionship in interacting with me, especially those who may feel lonely or isolated.Overall, as a robot, I am here to enhance human life by taking on tasks that are repetitive, dangerous, or time-consuming. My goal is to assist and support humans in various aspects of their lives, making their daily routines more manageable and enjoyable.中文:机器人已经成为我们生活中不可或缺的一部分,执行各种任务并在许多方面协助我们。
机器人的优点和缺点英语作文
机器人的优点和缺点英语作文English: Robots have various advantages, such as increased efficiency in completing tasks, consistency in performance, the ability to workin hazardous environments, and the capacity to work non-stop without fatigue. They can also handle repetitive and boring tasks that may be monotonous or dangerous for humans. Additionally, robots can be programmed to perform precision tasks with accuracy and speed, leading to higher productivity in industries. However, thereare also disadvantages to robots. They can be expensive to build and maintain, requiring specialized knowledge for programming and repair. Robots may also lead to job displacement as they take over tasks that were previously done by humans. Furthermore, robots lack human empathy and creativity, which may limit their problem-solving abilities in certain situations. Overall, while robots offer numerous benefits in terms of efficiency and productivity, there are also drawbacks that need to be considered in their integration into various industries and sectors.中文翻译: 机器人具有各种优点,比如在完成任务上提高了效率,在表现上保持了一致性,在危险环境中工作的能力,并且可以不知疲倦地不间断工作。
描写机器人的外貌英语初中
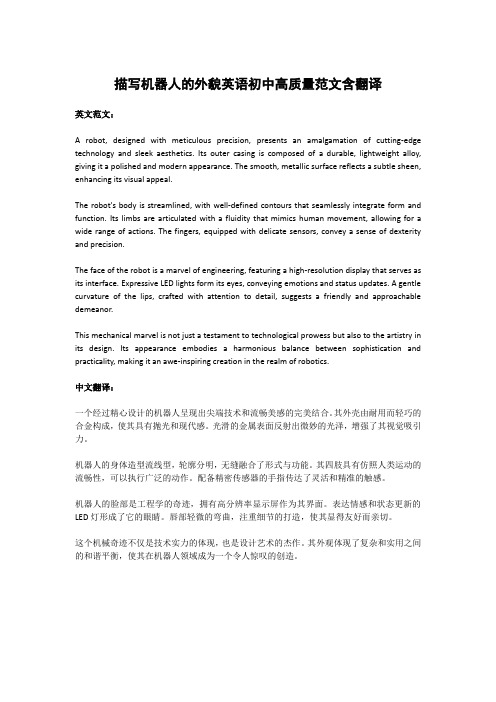
描写机器人的外貌英语初中高质量范文含翻译英文范文:A robot, designed with meticulous precision, presents an amalgamation of cutting-edge technology and sleek aesthetics. Its outer casing is composed of a durable, lightweight alloy, giving it a polished and modern appearance. The smooth, metallic surface reflects a subtle sheen, enhancing its visual appeal.The robot's body is streamlined, with well-defined contours that seamlessly integrate form and function. Its limbs are articulated with a fluidity that mimics human movement, allowing for a wide range of actions. The fingers, equipped with delicate sensors, convey a sense of dexterity and precision.The face of the robot is a marvel of engineering, featuring a high-resolution display that serves as its interface. Expressive LED lights form its eyes, conveying emotions and status updates. A gentle curvature of the lips, crafted with attention to detail, suggests a friendly and approachable demeanor.This mechanical marvel is not just a testament to technological prowess but also to the artistry in its design. Its appearance embodies a harmonious balance between sophistication and practicality, making it an awe-inspiring creation in the realm of robotics.中文翻译:一个经过精心设计的机器人呈现出尖端技术和流畅美感的完美结合。
智能机器人翻译器的说明书
智能机器人翻译器的说明书1.简介智能机器人翻译器是一款先进的语言翻译工具,采用最新的人工智能技术,为您提供高效准确的语言翻译服务。
本说明书将详细介绍智能机器人翻译器的功能及使用方法,以帮助您更好地使用该产品。
2.功能介绍2.1.语言识别功能智能机器人翻译器内置强大的语音识别功能,能够自动识别您输入的语言并将其转化为目标语言。
无论您说的是英语、汉语还是其他语种,智能翻译器都能够准确识别并展示相应的翻译结果。
2.2.多语言翻译功能智能机器人翻译器支持多种主流语言间的翻译,包括但不限于英语、汉语、法语、德语、日语、西班牙语等。
您只需将待翻译的语句输入翻译器,并选择目标语言,即可获得高质量、准确的翻译结果。
2.3.实时翻译功能智能机器人翻译器具备实时翻译的特点,它能够迅速将您的语音或文字输入转化为目标语言,使您能够实时地进行交流、沟通或阅读外文资料,大大提升您的工作效率和生活质量。
2.4.离线翻译功能智能机器人翻译器支持离线翻译,您可以下载相应语言的离线包,即使在没有网络的情况下,也能够使用翻译功能,方便您在旅行或偏远地区使用。
2.5.语音输入与文字输入功能智能机器人翻译器支持语音输入和文字输入两种方式,方便用户根据实际需求选择合适的输入方式。
只需按住语音按钮进行语音输入或者通过键盘输入文字,即可轻松完成语言翻译。
3.使用方法3.1.语音输入方式步骤1:打开智能机器人翻译器,并确保设备连接到网络。
步骤2:点击语音输入按钮,开始语音输入。
步骤3:说出您想要翻译的语句。
步骤4:松开按钮,翻译器会迅速显示出翻译结果。
3.2.文字输入方式步骤1:打开智能机器人翻译器,并确保设备连接到网络。
步骤2:选择输入框,并通过键盘输入待翻译的文字。
步骤3:点击翻译按钮,翻译器会迅速显示出翻译结果。
4.注意事项4.1.确保网络连接稳定智能机器人翻译器需要连接网络才能提供准确的翻译结果,请确保设备连接的网络稳定,并且网络延迟较低,以免影响翻译质量。
机器人外文翻译
机器人机器人可以界定一种由电子、电气或机械单位组成的可编程、自动控制装置。
更一般地说,它是一种职能到位的生活智能机器,机器人尤其可取的是某些工作职能。
它他们和人类不同,他们不会感到疲惫和厌倦,可以在环境条件差和真空,甚至是危险的环境下工作,他们不会因为一味地重复工作感到厌倦放下手边的工作。
机器人不同于一般机械设备的特征是机器人可以H己进行工作,并对内外部的工作状况进行检测,将检测到的结果反馈给控制系统,由控制系统下达命令来调整下一步的动作,更为重要的是机器人往往有能力去尝试不同的方法来完成某项任务。
常见的工业机器人由于受到制造精度的限制,他们的外型看上去都非常的庞大和笨重,机器人在程序的控制下进行高效和高精度的工作。
有人估计在1998年有72万台工业机器人被应用到生产屮。
可通信机器人被用在海底和核设施等半结构化的环境中,他们在那里从事非重复性任务,时间也没有太大的限制。
“机器人”在古吋候是指的是一个人,现代“机器人“一词最早出现在20世纪的捷克语屮,在捷克语屮机器人的意思是奴隶、仆人或被强迫工作的劳动力。
机器人与人有很大的区.别,但他们也非常的灵活,能够完成各种不同的工作。
据剧作家卡雷尔'卡培科介绍,最初的机器人就像弗兰肯斯坦博士的怪物--不是用机械式的方法,而是有化学和生物的原理造出来。
从这些最初的生物创作来看,这和FI前的机械机器人流行文化没有多大不同。
H前机器人领域己经有了许许多多的具有基本物理和导航能力机器人,同时,人们也开始将机器人运用于从娱乐到卫生保健等各个部门的F1常生活小,进时完全取代人类。
许多爱好智能机器人的研究者正在不遗余力的进行机器人的设计。
此外,机器人可用于更普遍的工作,例如清洁卫生的工作。
然而发明机器人的最初F1的是代替人类在肮脏、枯燥和危险下进行工作,可是现在他们现被汽作个人助理。
随着科学技术发展到一个新的境界,机器人将会具有更多的智慧,对人类的米来产生重大影现代机器人主要包拈:机械装置,如H]轮式平台、手臂或其它部件,能够在一定的空间范_内运动。
翻译机器人的技术原理解析
翻译机器人的技术原理解析随着全球化和数字化的不断深入,语言隔阂已成为制约人类交流和发展的阻碍。
而翻译机器人的出现,为人们打破语言壁垒,实现跨语言交流提供了新的解决方案。
本文将对翻译机器人的技术原理进行分析和解析。
一、机器翻译技术的发展历程机器翻译起源于20世纪初期,最初是基于规则的方法,即通过定义规则,将源语言转化为目标语言。
但由于语言变化、歧义等复杂性,导致该方法无法在实践中取得令人满意的效果。
随着人工智能技术的不断发展,机器翻译技术也逐渐向深度学习和神经网络方向发展。
近年来,深度学习的三大分支:卷积神经网络(CNN)、循环神经网络(RNN)和变换器(Transformer)被广泛应用于机器翻译领域。
其中,以Transformer模型最为成功和广泛应用。
二、Transformer模型的原理及优势Transformer模型是由Google团队于2017年提出的一种新型神经网络模型,其核心是自注意力机制(self-attention)。
传统的RNN模型是将以前的信息存储在隐藏层状态中,每个隐藏状态都会被用于后续的计算,而自注意力机制则是通过给定一组输入向量,动态地计算它们之间的相似度,以此捕捉多个向量之间的依赖关系。
这种变革打破了传统翻译方法中需要对输入语言和输出语言进行对齐的限制,从而更好地解决了语义不对应、同义词和多义词等问题。
Transformer模型不仅在翻译领域中表现出色,还成功应用于问答、自动摘要、对话生成等自然语言处理任务中。
其优势主要包括:1.全局信息捕捉能力强。
传统的RNN模型中信息只能是前后相邻状态之间的关系,而Transformer模型通过自注意力机制可以更好地捕捉全局信息。
2.模型训练速度快。
传统RNN为序列计算,时间复杂度高,因此训练速度取决于序列长度,而Transformer模型由于并行计算,训练速度较快。
3.模型可解释性强。
自注意力机制可以使模型更加易于解释和可视化。
译文
现实世界中的机器人当你想到机器人的时候,你脑海中浮现的是不是一个有着大致人类轮廓的、能够发挥像人类一样的功能,并且能用夹杂着高音的单调音调回答你的问题的有光泽的金属装置?很多人想象中的机器人都是这个样子的,但是,在现实世界中,机器人和人类长得一点都不像。
与之相反,机器人通常是一个不会说话的盒子状机器,能够代替人类高效率地完成一些重复性的或者危险的工作。
现在的机器人不仅仅是一台能够重复同一任务的自动工具,而是具有不同程度的人工智能,也就是说,机器人内置了一个计算机程序,能够指导机器人完成与人类智能有关的任务,比如推理、得出结论,以及从过去的经验中学习。
机器人不具备人形的原因是,如果机器人有两条腿的话,保持平衡会很困难。
机器人的移动主要依靠轮轴结构旋转来实现。
有的机器人甚至还能够通过接合点和发动机旋转和移动的臂。
机器人依靠多种内置的感觉器来帮助寻找路径。
连接在机器人底部的天线能够探测到机器人撞到的任何物体。
在斜坡上移动的时候,如果机器人开始摇晃,机器人内部的陀螺仪和钟摆仪就会探测到水平方向的变化。
机器人探测自己与其他物体的距离以及到达该物体的时间的方法是发射激光束和超声波,通过反射的信号来判断这些信息。
这些探测器不断地向计算机提供信息,计算机将这些信息进行分析,从而纠正或调整机器人的进一步动作。
随着科技的进步,机器人也会在功能和人工智能程序等方面上取得发展。
下一个问题是,同机器人发展感情有关系的问题。
即使是现在,也许有许多人对他们的宠物产生深厚的依恋,并以此代替朋友身子孩子。
很少有人认为这种行为有违道德。
但是复杂的机器人可能更有吸引力。
对于那些看上去老是和错误的人结婚的人来说,一个机器人另一半可能非常有诱惑力。
人工智能之父马文•明斯基谈到孤独的老人与机器人产生亲密关系这一问题时说:“如果机器人有人类所拥有的所有美德,并且更聪明,更善解人意,那么老人干嘛还要费劲同另一个脾气暴躁的老人交谈?”一台机器人可以按照主人的要求被设定成愚笨的,也可以设定成聪明的,或者性格独立的,或者屈从温顺的,而这正是机器人的一大缺陷。
Robots 语言点知识讲解
Robots 语言点知识讲解重点词汇desire【原句回放】Do you think it is possible for a robot to have its own needs and desires? 你认为机器人可能有自己的需要和欲望吗?【点拨】desire n.愿望;欲望v.想要……;向往……常用搭配:a desire for sth./ to do sth. 得到某物/做某事的渴望at one’s desire 应某人的要求desire to do sth. 渴望做某事desire + 从句(从句谓语用“should + 动词原形”,should可省)They have no desire to work for the government. 他们不想为政府工作。
The President desires that you (should) visit him next week.总统希望你下周来拜访他。
The company naturally desires to avoid negative publicity.公司自然想避开负面的宣传。
They all know the leaders’desire that neither country (should) lose any territory.他们都明白两国领导人对两国都不要失去领土的希望。
alarm【原句回放】However, when she first saw the robot, she felt alarmed. 然而她初次见到机器人时就感到吃惊。
【点拨】alarm vt.使警觉,使惊恐,惊动n. 警报,闹表,惊恐常见搭配:sound/ raise the alarm 发警报 a fire alarm 火警Her high temperature alarmed the doctors. 她的高烧惊动了医生们。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单轮机器人:实用机电一体化的解决方法引言:这篇文章展了一种机电一体化的方法,是复杂的动力系统满足规范要求。
这种机电一体化的方法有以下几个步骤:分析设计,系统集成,传感与控制,以及方案评估。
这种机电一体化方法意味着周期的设计与实现,检测和控制不断重复,直到系统通过评估满足目标要求。
在使用陀螺效应的机器人之后,一个被叫做GYROBO的单轮机器人进行了系统开发和机电一体化控制方法的研究,其目标是为了在地面上行驶的时候保持平衡性。
然而,对于单轮机器人来说,成功的保持平衡性并在路面上行驶是相当困难和具有挑战性的,由于一个点接触很容易在横向上倾倒。
为了拥有其平衡性,许多问题不得不在申请任何先进行测控实验前解决。
在诸多设计分析方法中(传感与控制,系统集成,方案评估),最重要的是分析设计,然而,分析设计不能保证平衡性成功的表现。
由于复杂的系统体系,实用机电一体化方法是去不断重复设计步骤,经过机械装配和重置车轮壳体内部组件,和结合简单的线性控制器,使GYROBO成功的实现平衡和行驶。
1.GYROBO建模GYROBO 能够按照远程操作员所给的指定轨迹行驶。
平衡控制的实验研究表明,GYROBO前进,后退,转弯,以及翻越障碍都支持机电一体化方法来控制复杂的系统。
在不同的机器人学类中,关于电动机器人的研究已经被重新定位,其中一个原因是最近研究方式的一种新趋势表明产业机器人正在向服务型机器人过度转化,移动性应该是服务型机器人的一个必备能力。
随着研究的进一步发展,似乎单轮移动机器人的数量正在逐步加。
根据其车轮在地面上接触点的数目,可将移动机器人分为三类:平面接触类,线接触类,点接触类。
传统的轮式机器人为了在运动过程中表现良好的平衡性,一般有四个轮子。
但存在运动学约约束,一个完整系统通常后面的两个轮子作为驱动,前边的两个轮子作为方向控制。
大多数移动机器人都属于这一类。
四轮机器人的缺点之一是宽式转动,因此在狭小空间里应用是不可行的。
三轮机械装置能够被用在全方位运动的完整系统中,全方位运动机器人一般用在不需要快速运动但须保持良好的平衡性室内环境中。
三轮式移动机器人属于平面接触类型,四轮型移动机器人形成一个矩形平面,三轮式机器人形成一个三角形平面。
两轮式移动机器人带来许多更具挑战性的控制问题。
因为其在掌控方向过程中更容易倾倒,它属于线接触型机器人,两个轮子实际上形成一条线,因此它是不稳定的同时也约束了横向运动。
为了保持平衡性,轮子的俯仰角成了平衡运动的关键。
一个较为成功的商业化两轮式机器人SEGWAY面市,继SEGWAY后,两轮机器人的研究已经大大的增加,因为他们与先进的机电一体化一起需要更富有挑战性的控制技术。
最后一类是点接触型移动机器人,最近轮子个数已经被减少到一个或者是一个接触点。
从内动力系统而言,单轮式移动机器人更具挑战性,因为它很容易倾倒,因此单轮机器人在控制方面是上述机器人类型中最困难的一个。
在这片篇文章中,有一些不同类型关于单轮机器人的研究报告。
利用陀螺效应平衡高速旋转的飞轮。
一个单轮式移动机器人能够通过组合旋转实现全方位的旋转动作。
它的旋转倾斜运动如图所示XU-Gyrover在单轮机器人的研究方面花费好几年时间研究了几个案例,最终他将单轮式移动机器人的研究成果整理在一本书中。
继Xu-Gyrover 之后,在过去的几年里单轮机器人的研究已经有了巨大幅度的增长,从动力学模型到控制,再到实现运动等等,其中单轮机器人的物理模型已经被Gyrover, Gyrobot在论文中提出并展现了出来。
在其他方面,一个有趣的单球型移动机器人已经被设计出来,同时它的平衡控制已经被成功的展现出来。
在之前的研究中,GYROBO机器人已经被实现了,但这种这种机器人存在震荡现象。
我们发现单轮机器人的成功轨迹跟踪控制的关键是系统集成而不是先进的控制算法,这就导致了机电一体化方法的必要性,正如图.2所示。
机电一体化方法是由几个阶段完成这项任务的,第一阶段是发展实际的物理系统,第二阶段是方案设计,其中包括基于遥感数据应用的控制算法,最后一阶段就是表现评估。
这些步骤将不断重复实施指导找到最佳合理的方案。
重复周期的实际机电一体化集成方法,传感与控制,方案评估已经被进行,为提高机器人的表现,所有硬件都坚实的被包裹在单轮里,使其中心位于水平衡垂的结构和松散耦合部分,这就消除了由不对称结构和松散耦合连接的不确定性。
组件被重新定位在系统的对称部位,使其横轴保持平衡,尽管在轮中重新定位的零件并不是处于最理想的状态,例如质点事实证明,机械变形有助于线性控制器来提高性能。
自从在GYROBO 机器人身上使用机电一体化方法之后,平衡性和轨迹控制性能已经大大的得到改善,尽管当前版本的GYROBO仍然依赖线性控制器,但其控制能力相比之前的一个已经有了显著的提高。
横摆角控制除了侧倾控制功能以外还有适应其它地形,这也正支持了机电一体化方法在复杂系统中的重要性,通过一个实验员所给的实验数据,平衡性和轨迹跟踪控制性能都被成功的证明了。
GYROBO的结构是一个类似圆盘形状的可移动机器人。
表.3展现了GYROBO的运动学构造,各种变量参数如表1所示。
2.飞轮的建模在整个系统中有两个轮子,其中一个是系统中的主轮,它的转动引导方向,另一个是飞轮来产生旋转运动,系统体内的轮子通过改变重心来旋转,,而飞轮则控制平衡运动。
尽管壳体通过橡胶辊字连接主体轮,但主体轮依旧位于壳体内部。
该主体旋转变量时αωβωγω它们分别是旋转角,滚转角,倾斜角。
飞轮变量是fβfγ,它们分别是转角和倾斜角。
因此控制飞轮的俯角来调节GYROBO的主题变量时α,wβ。
w由于GYROBO在平面上运动,因此,笛卡尔速度可以被描述为:其中其中3.控制方案尽管详细的运动学方程已经在图.15中给出,同时模拟研究已经已经在[29]中被展现出来,现在我采用一种基于非模型化的研究方法,它是依赖线性控制器的,而建立的已有参数不一定总是与之真正的心痛相匹配。
集成系统的实际一体化方法使线性控制器来控制单轮机器人,因为引起一种非对称结构和重心的偏离中心,而在调试过程中逐渐被淘汰。
飞轮是使GYROBO 机器人站起来并通过角动量运动使其 达到平衡 的一个关键因素,飞轮 的旋进率f α与倾轴f τ施加的扭矩的交叉乘积的关系。
关于自旋转轴得惯性矩,旋转角速度的关系如图所示。
其中转动惯量有夏式给出:2m 21r I f = 由于转动惯量和旋转角速度恒定,角动量常数为f f y r I 2m 21=期望输出的是角旋进率f α以及输出的是倾斜轴上的扭矩f T 。
为了有足够的旋进率来保持平衡,飞轮的设计参数如直径,宽度,质量的旋转速度,这些来确定飞轮的尺寸和一个适合的直流电动机。
其中选择一个合适的直流电动机是一项关键的任务,然而去找到一个合适的电动机来匹配并不容易,因为其重量和大小也应考虑,而且市场上往往没有合适的型号,这也导致了机电一体化方法重复飞轮的设计。
首先我们假定飞轮以恒定的高速旋转,然后飞轮的倾斜角f β就成为了保障GYROBO 输出平衡的关键因素。
GYROBO 的角度是一个偏转角w α,αd k 一个转角w β和一个俯仰角w γ,滚转角是由直流电机控制的,旋转速度的倾斜角是从旋转轴和飞轮主轴相交叉而得来的,由于旋转轴的旋转速度被设定为一个常数,只有控制回转仪力量的一张控制输出是飞轮的倾斜角。
最终GYROBO 的控制输入量是飞轮的倾斜角f β,这就简化了控制结构,因为其他的控制输入变量都可设为常数。
GYROBO 机器人从3轴测得的转角和俯仰角由于传感器反馈引起错误,PD 控制器控制输入是分开设计滚转角和俯仰角的控制的。
其中px k dx k 是PD 控制器横向倾角,αp k ,αd k 是PD 控制器的偏航角控制,飞轮的的控制输入倾角是两个控制输出信号(4),(5)的总和。
αβu u f +=u ;其中f u 是飞轮倾角的控制输入端。
图.5显示了控制GYROBO 的角控制框图,还有其他的控制输入信号,驱动转矩d u 和自转扭矩c u 以形成开关控制。
因为他们通常被设定为常量,然而找到合适的额驱动转矩控制输入值d u 和旋转扭矩c u 是非常重要的,同时在实验和错误中反复证明找到这个合适的值,这也使得单轮机器人复杂的结构变得简单化了,正如图.5所示。
4.GYROBO 设计GYROBO 真正实现如图.7所示。
三个驱动器,一个驱动马达,旋转马达,和一个可倾斜传动器被用于产生旋转运动,驱动电机产生运动,以及一个倾斜马达和旋转马达的组合产生滚转和偏航运动。
驱动电机驱动车轮,旋转电机驱动的飞轮,传感器和控制硬件是位于顶部的中心。
电池位于在下面,以降低重心。
GYROBO 具有外和内轮,如图.7所示。
本外环轮由橡胶制成与内轮包含所有硬件,外和内轮是由几个连接的辊轮,以使彼此接触。
所有的材料被包装内侧的车轮是内轮,直径和车轮的质量分别是0.45米和11.2千克,。
详细规范本体车轮的化合物列于表2。
飞轮设计在设计中最重要的问题是飞轮。
其通过合成自旋角产生的陀螺效应的高速旋转并移动一个整体的飞轮的倾斜角结构。
但是,飞轮的高速旋转产生振动的原因有很多,如一个不对称飞轮体,从正时皮带非线性,一个松散的自旋轴和松耦合的部分。
飞轮的振动传播到传感器造成不准确感测测量其导致在恶劣的控制性能和不稳定的平衡,因此,对于机电一体化方法而言,抑制振动是一个重要任务,因为大多数的不确定性来自飞轮。
马达和车轮之间的接触是由橡胶制成的轮,如图所示。
8,对于行驶时,驱动电机转动胶轮来改变重心的位置,驱动电机处于内部控制旋转方向,那么的重心点移动到前进方向为图8(a)所示。
在初始驱动,滑移,可能会出现在驱动轮,驱动电机产生由开环驾驶运动控制。
5.硬件设计当前的系统具有三个不同的传感器,倾斜,陀螺仪,和的编码器。
陀螺仪传感器可以测量3轴角运动。
图9示出获得从陀螺仪传感器的数据的框图。
虽然陀螺传感器提供了三个坐标轴数据,两轴数据被使用,因为偏航角数据是不是由于可靠传感器的分辨率还未知。
整体控制的硬件结构的构成如图所示图.10,一种DSP芯片被用作用于管理传感器的主控制器信号处理,控制算法的计算和PWM一代电机驱动器。
陀螺仪传感器是用于测量轮子偏航角和倾斜角度。
操纵杆可以命令所需的信号,以GYROBO通过无线通信远程地在所需旋转速度的V和所需的驱动速度d v,如图.5。
f6.实验研究6.1通过侧倾角控制平衡任务首先,在描述的平衡控制任务已经过测试图.11,采样时间设置为20毫秒。
四杆安装在左,右手侧,以保护系统,当它落在倒在地上。
在同一个接触点平衡控制由单轮机器人在地面时的向前推进。
在该实验中,一个滚转角被控制着。
在开始时,GYROBO似乎使内均衡,但后8秒变为不稳定,如图12(a)所示,我们注意到GYROBO的飞轮的倾斜角不断增加的一个方向,以尽量减少侧倾角,如图所示.12(b)所示。