基于ARM9的自由摆平板控制系统设计
基于自由摆的平板控制系统--我的设计
B组基于自由摆的平板控制系统参赛学校:参赛学生:指导老师:联系方式:基于自由摆的平板控制系统摘要本控制系统由核心控制模块、角度采样模块、电机驱动模块、液晶显示模块、键盘控制模块等部分组成。
经实验证明本控制系统设计的各项指标都满足大赛的基本部分和核心部分的要求,部分设计实现大赛发挥部分,符合大赛目的。
关键字:STC12C5A60S单片机、角度传感器、L297、L298控制芯片、步进电机。
Abstract一、总体方案比较与论证方案一、方案二、利用STC12C5A60S2单片机作为控制系统,由单片机内部的AD转换模块对角度角度传感器 摆杆θ θ摆杆 平板平板二、各模块设计介绍1、角度采集模块设计根据题目要求,要保持平板平衡,需利用角度传感器随时测量旋转角度,角度传感器和单片机的连接2、键盘控制模块3、核心控制模块本设计的核心控制模块主要是由STC12C5A60S2单片机组成。
图14、液晶显示模块5、电机驱动模块12U1A74LS0734U1B 74LS071110U1E74LS071312U1F74LS07RED1ORANGE2Y E L L O W3PINK4B L U E5STEP MOTOR4 PHASE+12VORANGE PINKYELLOWBLUEREDABCD三、测试方案与测试结果在完成后进行调试时,采用的方法是首先分别调试各单元模块,调通后在进行整机调试的方法。
1、摆杆转动角度的测试。
2、键盘控制模块的调试。
3、液晶显示模块的调试。
4、单片机程序的调试。
5、步进电机转动角度的调试。
6、对设计的整体测试。
四、结论我们的设计利用单片机STC12C5A60S2作为核心控制,通过采集角度传感器的实时电压,利角度传感器采集来的数据和步进电机的状态实时显示在液晶屏上面,以便我们能够对系统的整体运行状态进行监控。
五、参考文献:。
基于自由摆的平板控制系统[001]
![基于自由摆的平板控制系统[001]](https://img.taocdn.com/s3/m/c8876da9951ea76e58fafab069dc5022aaea469e.png)
基于自由摆的平板控制系统引言自由摆是一个常见的物理系统,其在控制工程中具有广泛的应用。
本文将介绍基于自由摆的平板控制系统,包括系统的结构、控制器设计、实施与结果分析等内容。
系统结构平板控制系统由一个平板和一个自由摆组成。
平板通过悬臂连接到摆杆,而摆杆则通过铰链连接到固定的支架上。
摆杆上安装有传感器,用于测量摆杆的角度。
控制器根据测量值计算并控制平板的运动。
控制器设计平板控制系统的目标是使得平板保持水平,即控制摆杆的角度。
为了实现这个目标,我们设计了一个基于PID控制器的闭环控制系统。
PID控制器由比例项、积分项和微分项组成,分别负责控制系统的响应速度、稳态误差和稳定性。
比例项比例控制通过将当前误差乘以一个比例增益来产生控制量。
在平板控制系统中,比例项负责响应速度,即控制系统对误差的快速反应。
通过调整比例增益,我们可以控制系统的响应速度,但需要注意的是,如果比例增益设置过大,可能导致系统不稳定。
积分项积分控制通过对误差的累积进行控制。
在平板控制系统中,积分项负责消除稳态误差,即平板保持在水平位置时的偏差。
通过调整积分增益,我们可以减小或消除稳态误差,但需要注意的是,如果积分增益设置过大,可能导致系统不稳定。
微分项微分控制通过对误差的变化率进行控制。
在平板控制系统中,微分项负责增加系统的稳定性,防止系统产生过冲现象。
通过调整微分增益,我们可以控制系统的稳定性,但需要注意的是,如果微分增益设置过大,可能导致系统不稳定。
实施与结果分析为了实施基于自由摆的平板控制系统,我们首先搭建了实验装置,并进行了实验测试。
通过对实验数据的分析和处理,我们得到了系统的动态特性,并据此进行控制器参数的调整。
经过多次调参和测试,我们最终得到了一个稳定且快速响应的控制系统。
在平板保持水平的情况下,我们对系统进行了稳态误差分析,并对控制效果进行了进一步的验证。
结果分析显示,通过PID控制器,我们成功地控制了平板的运动,使其保持在水平位置。
A题基于自由摆的平板控制系统
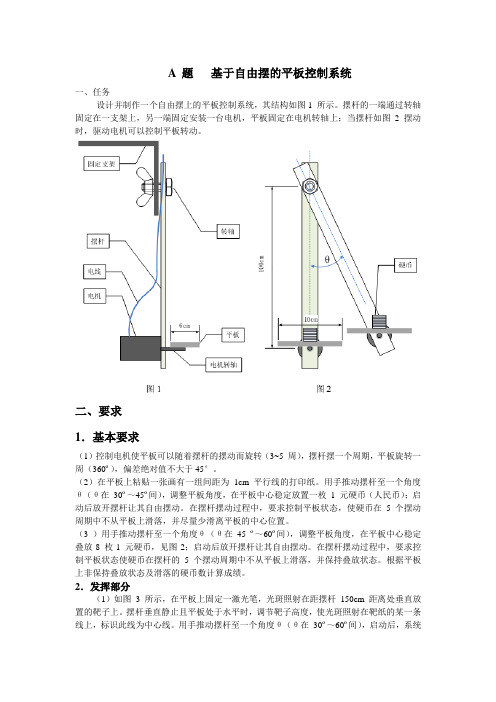
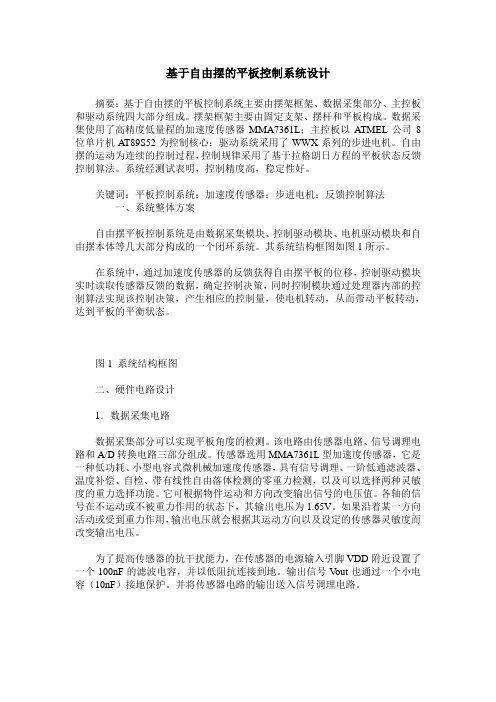
A 题基于自由摆的平板控制系统一、任务设计并制作一个自由摆上的平板控制系统,其结构如图1 所示。
摆杆的一端通过转轴固定在一支架上,另一端固定安装一台电机,平板固定在电机转轴上;当摆杆如图2 摆动时,驱动电机可以控制平板转动。
二、要求1.基本要求(1)控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
(2)在平板上粘贴一张画有一组间距为1cm 平行线的打印纸。
用手推动摆杆至一个角度θ(θ在30º~45º间),调整平板角度,在平板中心稳定放置一枚1 元硬币(人民币);启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态,使硬币在 5 个摆动周期中不从平板上滑落,并尽量少滑离平板的中心位置。
(3 )用手推动摆杆至一个角度θ(θ在45 º~60º间),调整平板角度,在平板中心稳定叠放8 枚1 元硬币,见图2;启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的 5 个摆动周期中不从平板上滑落,并保持叠放状态。
根据平板上非保持叠放状态及滑落的硬币数计算成绩。
2.发挥部分(1)如图3 所示,在平板上固定一激光笔,光斑照射在距摆杆150cm 距离处垂直放置的靶子上。
摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。
用手推动摆杆至一个角度θ(θ在30º~60º间),启动后,系统应在15秒钟内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm ),完成时以LED 指示。
根据光斑偏离中心线的距离计算成绩,超时则视为失败。
(2 )在上述过程完成后,调整平板,使激光笔照射到中心线上(可人工协助)。
启动后放开让摆杆自由摆动;摆动过程中尽量使激光笔光斑始终瞄准照射在靶纸的中心线上,根据光斑偏离中心线的距离计算成绩。
基于自由摆的平板控制系统设计学士学位论文
学士学位论文基于自由摆的平板控制系统设计姓名:颜芳学号:200905120342指导教师:李爱云院系(部所):光电工程学院专业:电子信息工程完成日期:2013年05月15日学士学位论文基于自由摆的平板控制系统设计姓名:颜芳学号:200905120342指导教师:李爱云院系(部所):光电工程学院专业:电子信息工程完成日期:2013年05月15日摘要本系统是STC12C5A60S2基于单片机为控制核心的平板控制系统。
通过单片机对MMA7455倾角传感器数据采集与处理,控制L298N电机驱动,调整57BYG 步进电机的转动,实现平板跟随自由摆的摆动而周期性旋转,可以通过控制平板运动使8枚叠放硬币在自由摆运动过程中静止。
在实现平板控制系统基本功能的同时,利用MMA7455倾角传感器实时检测自由摆摆动的角度,运用查表法实现激光笔照射中心线的功能。
在以上功能实现的同时使用TFT彩色液晶屏显示MMA7455倾角传感器的三轴变化情况,采用触摸键盘替代按键进行功能设定与选择,充分的体现了本系统的协调性与实用性。
关键词: STC12C5A60S2E;57BYG;MMA7455;TFT触摸屏AbstractThe flat control system is based on the single chip STC12C5A60S2 as control core. Through to MMA7455 inclination angle sensor data changeacquisition and processing, controls the L298N motor-driven to realize 57BYGto stepper motor's angle adjustment, achieve the flat periodic rotating with thewaver of free-pendulum. Through control the flat movement to prevent 8 piecescoins movement when the free pendulum motor processing.While realizes the flat control system basic function,use the MMA7455 inclination angle sensor detect the angle of the free-swinging pendulum, and use table look-up method realize the function of the laser pen illuminating the center line. Realizing the function of the above at the same time, demonstrates the MMA7455 inclination angle sensor's three axis change situation through the TFT colored touching liquid crystal module. Use touch-screen substitution pressed key carry on the different function settings and the choice and fully embodies the coordination and practical of the system in the end.Keyword: STC12C5A60S2, 57BYG, MMA7455, TFT torch screen目录第1章绪论 (1)第2章系统方案论证与比较 (2)2.1基本要求 (2)2.2论证与比较 (2)第3章理论分析与设计 (4)3.1平板状态测量方法 (4)3.1.1硬币的受力分析: (4)3.1.2平板状态分析: (5)第4章电路与程序设计 (6)4.1电路设计 (6)4.1.1.电源电路设计 (6)4.1.2 STC12C5A60S2最小系统 (7)4.2单元设计 (7)4.2.1主控板单元 (7)4.2.2驱动系统单元 (8)4.2.3数据采集单元 (10)4.2.4 LCD液晶显示单元 (10)第5章测试方案与测试结果 (12)5.1对于基本要求(1)的测试方案: (12)5.2对于基本要求(2)(3)的测试方案: (12)第6章总结 (13)参考文献 (14)致谢 (16)第1章绪论单片机是当今应用越来越广泛的一个装置,渗透到我们生活的各个领域,在1971年诞生以来,经历了SCM、MCU、SoC三大阶段,随着工业控制领域要求的提高和消费电子产品的大发展,单片机技术得到了飞速发展。
基于自由摆的平板控制系统

基于自由摆的平板控制系统引言平板控制在工业自动化和机器人技术中具有广泛应用。
基于自由摆的平板控制系统可以通过控制平板的运动来实现对系统的控制以及稳定性的提高。
本文将介绍基于自由摆的平板控制系统的原理、设计和实现。
自由摆的基本原理自由摆是一个简单的振动系统,由一个固定在一端的杆和一个可以在杆上摆动的质点组成。
自由摆的振动受重力和摩擦力的影响。
通过控制摆动的角度和速度,可以实现对平板的控制。
基于自由摆的平板控制系统利用这一原理,通过控制摆动的力,使平板能够保持平衡或者按照指定轨迹移动。
平板控制系统的设计平板控制系统的设计涉及到以下几个方面:1. 传感器平板控制系统需要获取平板当前的角度和速度信息,以便进行控制。
常用的传感器包括陀螺仪和加速度计。
陀螺仪用于测量平板的角速度,而加速度计用于测量平板的加速度。
2. 控制算法基于自由摆的平板控制系统需要设计合适的控制算法来对平板进行控制。
常见的控制算法包括PID控制算法、模糊控制算法和神经网络控制算法等。
根据实际需求和系统性能要求,选择合适的控制算法进行设计和实现。
3. 执行机构平板控制系统需要一个执行机构来实现对平板的控制。
常用的执行机构包括电机和伺服驱动器。
电机用于提供动力,伺服驱动器用于控制电机的运动。
4. 控制器平板控制系统需要一个控制器来组织传感器、控制算法和执行机构的协调工作。
控制器负责接收传感器的数据,经过控制算法计算得到控制信号,然后通过执行机构实施控制。
平板控制系统的实现实现基于自由摆的平板控制系统需要按照以下步骤进行:1.硬件设计:确定所需传感器、执行机构和控制器,并设计相应的电路板和机械结构。
2.软件开发:编写控制算法和控制器的软件程序,进行传感器数据的读取和控制信号的输出。
3.系统集成:将硬件和软件进行集成,进行相应的调试和优化。
4.系统测试:对平板控制系统进行功能测试和性能测试,检验系统的稳定性和控制效果。
结论基于自由摆的平板控制系统是一种常见的控制系统,在工业自动化和机器人技术中具有广阔的应用前景。
基于自由摆的平板控制系统

基于自由摆的平板控制系统中文摘要:本系统设计了一个基于自由摆的平板控制系统,由传感器模块、控制驱动模块、电机执行机构和自由摆等部分组成的闭环控制系统。
角度测量使用三向加速度传感器MMA7361,主控板采用宏晶公司的单时钟周期的单片机STC12C5A60S2为控制核心,平板转动采用39HS02步进电机控制,控制规律采用PID控制算法。
根据加速度传感器测得摆杆与平板的当前角度,MCU控制步进电机转动,实现硬币平衡与激光笔的跟随靶线。
本文简单介绍了系统的组成和工作原理、理论分析与计算、硬件与软件设计,并给出了系统的电路。
测试结果表明:电机可以高精度的控制平板的转动,并实现了硬币不从平衡板上滑落和激光笔的光斑在静态和动态时偏离中心线的距离比较小。
关键词:加速度传感器,步进电机,平板控制,硬币,激光笔English abstract:The system designs a panel control system based on a free pendulum, is mainly formed by the sensor part, drive system, motor actuating mechanism and free pendulum frame. It is a closed loop control system. Tilt angles are measured by using a three axis accelerometer sensor MMA7361, the main control board adopts a singlechip STC12C5A60S2 which has single clock cycle of Hong Jing company as the core processor of the control system, The panel rotation are controlled by using the stepper motor 39HS02.The control rules uses PID control algorithm. According to the present angles which are measured by accelerometer sensor between free pendulum and flat, stepper motor rotation are controlled by MCU, realizing the functions of coins balance and laser pen following target line. This thesis simply introduces the system composition and working principle, theoretical analysis and calculation, designs of hardware and software, the system circuits are drawn. The testes results show that, the panel rotated are controlled by motor with high accuracy, the coins don’t slide off the balance panel, the laser pen don’t deviate from the center line.Keywords:accelerometer sensor, stepper motor, panel control, coins, laser pen一、方案论证与理论分析1. 平板状态测量与调整 (1)硬币平衡为了平衡板上的硬币不滑落,方案如下:方案一:当硬币所受合力为零时,即当摆杆自由摆动时,平板与水平面时刻保持平行,如此,可以检测平板与水平面的夹角,对平板开环控制,以调整角为零。
基于自由摆的平板控制系统 (2)

基于自由摆的平板控制系统
基于自由摆的平板控制系统是一种常见的控制系统,常见
于气动、航空、机械等领域的平衡控制中。
自由摆是一个由摆杆和摆球组成的系统,摆杆与地面垂直,摆球可以沿水平方向摆动。
该系统受到外部扰动(如风力、力矩等)的影响,产生不稳定的摆动。
平板控制系统的目
标是通过传感器感知摆球的运动状态,然后通过控制器下
达指令,通过执行器对摆球进行控制,使得摆球保持平衡。
平板控制系统的基本原理是通过负反馈控制来实现。
传感
器会测量摆球的位置和速度,并将这些信息反馈给控制器。
控制器分析这些信息,并根据设定的控制策略计算出控制
命令。
执行器将控制命令转化为相应的动作,如施加力矩
或改变摆球的位置。
摆球的反馈信号再次被传感器检测到,从而形成一个闭环反馈控制系统,通过不断的调整和校正,使得摆球保持平衡。
这种平板控制系统可以应用于很多领域,例如飞机的平衡控制,风力发电机组的控制,机器人的姿态控制等。
通过合理的控制策略和算法设计,可以实现较好的控制效果,提高系统的稳定性和响应性能。
总结起来,基于自由摆的平板控制系统是一种通过传感器感知摆球状态,控制器计算控制命令,执行器对摆球进行控制的系统,以实现对摆球的平衡控制。
基于自由摆的平板控制系统设计报告

基于自由摆的平板控制系统设计报告摘要基于自由摆的平板系统设计是设计基于STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调。
一、系统设计1.1设计要求a。
控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
b。
在平板上粘贴一张画有一组间距为1cm 平行线的打印纸。
用手推动摆杆至一个角度θ(θ在30º~45º间),调整平板角度,在平板中心稳定放置一枚1 元硬币(人民币);启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态,使硬币在5 个摆动周期中不从平板上滑落,并尽量少滑离平板的中心位置.c.用手推动摆杆至一个角度θ(θ在45º~60º间),调整平板角度,在平板中心稳定叠放8 枚1 元硬币,见图2;启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的5 个摆动周期中不从平板上滑落,并保持叠放状态.根据平板上非保持叠放状态及滑落的硬币数计算成绩。
d.如图3 所示,在平板上固定一激光笔,光斑照射在距摆杆150cm 距离处垂直放置的靶子上。
摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。
用手推动摆杆至一个角度θ(θ在30º~60º间),启动后,系统应在15 秒钟内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm),完成时以LED 指示。
根据光斑偏离中心线的距离计算成绩,超时则视为失败.二、系统方案的选择与论证2。
1 整体方案基于自由摆的平板控制系统选用STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调2。
基于自由摆的平板控制系统

基于自由摆的平板控制系统
基于自由摆的平板控制系统是一种将自由摆与平板结合的
控制系统,通过控制自由摆的运动,实现对平板的控制。
这种控制系统可以广泛应用于机器人控制、无人机控制、
航天器控制等领域。
在这种控制系统中,平板通常被固定在一个基座上,自由
摆则被安装在平板上。
自由摆通常由一个摆杆和一个负载
物组成,负载物的位置会影响平板的姿态。
通过改变自由
摆的位置和角度,可以控制平板的姿态。
控制自由摆的运动可以通过多种方式实现,常用的方法包
括PID控制、模糊控制、神经网络控制等。
这些控制方法
可以根据系统的要求和性能进行选择和调整,以实现精确
的平板控制。
此外,为了实现更加稳定和准确的平板控制,还可以结合
传感器和反馈系统。
通过加入陀螺仪、加速度计等传感器,
可以实时监测平板的姿态,并将反馈信号送回控制系统进行调整。
这样可以提高系统的稳定性和精度。
总的来说,基于自由摆的平板控制系统是一种灵活且高效的控制方法,能够实现对平板的精确控制。
它在很多应用中都能发挥重要的作用,特别是在需要保持平板姿态稳定的场合。
基于单片机自由摆平衡板控制系统设计

基于单片机自由摆平衡板控制系统设计自由摆平衡板是一种利用现代科技与物理原理相结合的新型运动设备,它既具有娱乐性又有锻炼身体的功效。
随着社会的进步和科技的发展,越来越多的人开始注重健康和运动,因此自由摆平衡板成为了一种受欢迎的运动方式。
然而,一台稳定、高效的自由摆平衡板需要先进的控制系统来实现。
在当前的科技环境下,单片机作为一种主控芯片,被广泛应用于各类控制系统中。
在自由摆平衡板控制系统设计中,单片机扮演了至关重要的角色。
单片机可以通过内置的模拟输入输出接口来感知摆板的状态,通过程序设计来控制电机的转速,从而实现平衡板的平衡。
单片机不仅能够提高自由摆平衡板的稳定性,还可以实现各种功能,如倾斜角度检测、速度控制等。
因此,基于单片机的自由摆平衡板控制系统设计成为了一种创新且高效的解决方案。
为了实现自由摆平衡板控制系统的设计,首先需要对自由摆平衡板的原理和结构有充分的了解。
自由摆平衡板主要由底座、摆板、传感器、电机等部件组成。
底座是支撑整个设备的主体结构,摆板则是承载用户并进行倾斜运动的平台。
传感器用于感知摆板的倾斜角度,电机则用于根据传感器的信号来实现自由摆平衡板的控制。
在系统设计的初期,需要对这些部件的性能和工作原理进行详细的分析和测试。
在控制系统设计的过程中,需要考虑到摆板的倾斜角度、速度和加速度等因素。
单片机可以通过内置的PID控制算法来实现对这些参数的准确控制,从而实现对自由摆平衡板的实时控制。
PID控制算法是一种经典的反馈控制算法,通过调节比例、积分和微分三个参数来实现对系统的稳定性和响应速度的优化。
在自由摆平衡板控制系统设计中,PID控制算法的应用可以大大提高系统的稳定性和控制精度。
除了PID控制算法,单片机还可以通过其他高级控制算法来实现自由摆平衡板的控制。
例如,模糊控制算法可以在一定程度上提高系统的适应性和鲁棒性,神经网络控制算法可以实现对系统的自学习和自适应。
这些高级控制算法的应用可以进一步提升自由摆平衡板控制系统的性能和智能化水平。
基于ARM9内核的智能控制系统设计
11 3 人机通道 系统中 , L CD 硬件我们选用 SHA RP 公司推出的分辨率
图 1 自动灌溉控制系统的结构框图 11 1 ARM 嵌入式处理器 S3C2410 X
系统采 用 基 于 A RM920 T ( A RM9 TDMI) 内 核 的 16/ 32 位 RISC 嵌入式微处理器 , 主要应用在高性价比和低功耗的场 合 。运行频率一般是 203 Hz 。他具有丰富的片上资源 : 16k 高 速缓存 (cache) ; 一个 L CD 控制器 (支持 STN 和 TF T 带有触 摸屏的液晶显示屏) ; SDRAM 控制器 ; 3 个通道的 UA R T ; 4 个通道的 DMA ; 4 个具有 PWM 功能的计时器和 1 个内部时
1 系统硬件设计
系统采用基于嵌入式操作系统μC/ OS - II 的 A RM 硬件平 台 , 以满足系统较高的实时性需求 , 方便了软硬件功能修改 、 扩充及升级等需求 , 缩短了开发周期 , 降低了研发成本[223] 。
智能灌溉控制系统的工作原理为系统启动后 , 自动运行状 态下 , ARM9 微处理器执行各个传感器的采样功能 , 并根据
键盘电路采用 HD7297 键盘专用芯片来进行键盘电路的设 计 。HD7297 是一个具有串行接口的智能驱动芯片 。该芯片同 时还可连接多达 64 个键的键盘矩阵 , 内部含有去抖电路 。当 有键按下时 , 键值自动保存在寄存器中 , 通过读取该寄存器 , 就可获得键盘键号 , 避免了传统的键盘扫描和计算键值等软 件 , 方便程序编写 。HD7297 与 S3C2410X 的连接非常简单 , 只 要 把 以 下 4 根 线 : CS , CL K , DA TA , KE Y 连 接 到 S3C2410X 的 GPIO 即可 。 11 4 其它基本功能模块
基于自由摆的平板控制系统设计
基于自由摆的平板控制系统设计摘要:本系统采用8位精简指令集高性价比的ATmeag32单片机作为主控芯片,利用步进电机驱动平板的转动。
模拟倾角传感器WQ36-90实现摆杆摆角的测量,三轴数字加速度传感器MMA7455模块实现平板倾角的测量。
利用延时方式对步进电机进行精确无重叠的控制,配合2个传感使整个系统构成闭环控制系统。
系统的功能切换靠4位拨码开关实现,部分触发功能利用按键进行触发。
系统配备LED和蜂鸣器作为声光指示,12864液晶屏用于显示调整时间和文字提示等功能,整体构成一个良好的人机交互界面。
整个系统在程序的协调下正常稳定的运行,较精确的达到了题目的各项指标要求。
关键字:自由摆控制,ATmeag32,步进电机,倾角传感器WQ36-90,三轴加速度传感器MMA7455,闭环系统一、方案论证与比较1.系统控制方案论证与比较方案一:开环控制方式系统只采用1个倾角传感器测量摆杆摆角,再利用三角函数关系得到电机转角,即平板转角。
这种控制方式的主要优点是系统软硬件的设计相对简单,但对于材料形变、摆杆尺寸及电机安装精度等诸多因素引起的误差系统没有自适应性,难于进行实时校正。
一旦运行时间较长,系统误差积累将导致控制失败。
方案二:闭环控制方式系统采用2个角度传感器:一个用于测量摆杆的摆角,另一个用于测量平板倾角。
2个传感器构成闭环的控制系统,使系统产生的各种误差都能通过2个传感器的相互对比校正加以消除,从本质上解决系统误差的影响。
对比以上两方案,考虑到系统控制精度要求高,因此选用方案二构建系统。
2.模块方案论证与比较2.1主控芯片方案一:选用51系列单片机51系列单片机具有开发简单、资料和应用实例丰富、技术成熟以及价格低廉等优势,但是由于采用的是复杂指令集,限制了其运行速度,并且系统资源很少。
片上没有集成时下常用的SPI、I2C、ADC等接口或功能,这大大的限制了它的使用范围。
因此,51单片机只适用于一些精度要求不高,对成本敏感的控制场合。
基于自由摆的平板控制系统设计
基于自由摆的平板控制系统设计摘要:基于自由摆的平板控制系统主要由摆架框架、数据采集部分、主控板和驱动系统四大部分组成。
摆架框架主要由固定支架、摆杆和平板构成。
数据采集使用了高精度低量程的加速度传感器MMA7361L;主控板以ATMEL公司8位单片机AT89S52为控制核心;驱动系统采用了WWX系列的步进电机。
自由摆的运动为连续的控制过程,控制规律采用了基于拉格朗日方程的平板状态反馈控制算法。
系统经测试表明,控制精度高,稳定性好。
关键词:平板控制系统;加速度传感器;步进电机;反馈控制算法一、系统整体方案自由摆平板控制系统是由数据采集模块、控制驱动模块、电机驱动模块和自由摆本体等几大部分构成的一个闭环系统。
其系统结构框图如图1所示。
在系统中,通过加速度传感器的反馈获得自由摆平板的位移,控制驱动模块实时读取传感器反馈的数据,确定控制决策,同时控制模块通过处理器内部的控制算法实现该控制决策,产生相应的控制量,使电机转动,从而带动平板转动,达到平板的平衡状态。
图1 系统结构框图二、硬件电路设计1.数据采集电路数据采集部分可以实现平板角度的检测。
该电路由传感器电路、信号调理电路和A/D转换电路三部分组成。
传感器选用MMA7361L型加速度传感器,它是一种低功耗、小型电容式微机械加速度传感器,具有信号调理、一阶低通滤波器、温度补偿、自检、带有线性自由落体检测的零重力检测,以及可以选择两种灵敏度的重力选择功能。
它可根据物件运动和方向改变输出信号的电压值。
各轴的信号在不运动或不被重力作用的状态下,其输出电压为1.65V。
如果沿着某一方向活动或受到重力作用,输出电压就会根据其运动方向以及设定的传感器灵敏度而改变输出电压。
为了提高传感器的抗干扰能力,在传感器的电源输入引脚VDD附近设置了一个100nF的滤波电容,并以低阻抗连接到地。
输出信号V out也通过一个小电容(10nF)接地保护。
并将传感器电路的输出送入信号调理电路。
基于自由摆的平板控制系统

基于自由摆地平板控制系统基于自由摆地平板控制系统——2018年全国大学生电子设计竞赛本科组b题北京航空航天大学【摘要】本系统以s3c2440 arm单片机为控制核心,由触摸液晶屏选择控制实现不同过程地地切换,经角度传感器得到自由摆由初始位置摆过地角度,并将数据传递给arm单片机,通过相应数学及物理公式地运算,最终实现题目要求地任务.其中平板控制部分使用行星减速步进电机,增加了扭矩与控制精度.发挥部分采用加速度传感器读取数据,运用三角函数计算控制平板地角度,使激光在摆动中保持打在靶上同一点.本系统具有工作精度高、反应快速准确、制作材料简易等优点.【关键词】自由摆;平板控制;s3c2440 arm单片机1.系统方案本系统要求电机能够精确控制平板随摆杆摆过地角度而转动,故使用角位移传感器、加速度传感器、行星减速步进电机、s3c2440 arm单片机等模块实现符合题目要求地设计,下面分别论证对于这几个模块地选择.1.1 自由摆摆角测量地论证与选择方案一:直线位移传感器.根据三角形内角及边之间地相关定理,可以测量自由摆划过地地长度计算出摆角地大小.直线位移传感器地功能在于把直线机械位移量转换成电信号.有效行程75mm~1250mm,两端均有4mm缓冲行程,精度0.05%~0.04%fs,允许极限运动速度为10m/s.然而自由摆为圆弧运动不易测出直线距离,而且位移传感器机械安装固定困难.方案二:角位移传感器.该传感器采用特殊形状地转子和线绕线圈,模拟线性可变差动传感器<lvdt)地线性位移,有较高地可靠性和性能,转子轴地旋转运动产生线性输出信号.此输出信号地相位指示离开零位地位移方向.转子地非接触式电磁耦合使产品具有无限地分辨率,即绝对测量精度可达到零点几度.可将角位移传感器地转子固定在自由摆地转轴上,可以根据角位移传感器返回地阻值测出自由摆摆动地角度.角位移传感器测量符合需求,机械安装简单,价格合适.综合以上两种方案地优缺点,角位移传感器可以准确读出摆杆摆过地角度,故选择方案二.1.2 电机地论证与选择方案一:直流电机.直流电机是定义输入为直流电能地旋转电机.加于直流电动机地直流电源,借助于换向器和电刷地作用,使直流电动机电枢线圈中流过地电流,方向是交变地,从而使电枢产生地电磁转矩地方向恒定不变,确保直流电动机朝确定地方向连续旋转.这就是直流电动机地基本工作原理.直流电机地优点:调速性能好,调速范围广,易于平滑调节.启动,制动转矩大、易于快速启动、停止.然而直流电机地缺点是不能精确地控制转角.方案二:模拟舵机.模拟舵机在空载时,没有动力被传到舵机马达.当有信号输入使舵机移动,或者舵机地摇臂受到外力地时候,舵机会作出反应,向舵机马达传动动力<电压).这种动力实际上每秒传递50次,被调制成开/关脉冲地最大电压,并产生小段小段地动力.当加大每一个脉冲地宽度地时候,如电子变速器地效能就会出现,直到最大地动力/电压被传送到马达,马达转动使舵机摇臂指到一个新地位置.然后,当舵机电位器告诉电子部分它已经到达指定地位置,那么动力脉冲就会减小脉冲宽度,并使马达减速.直到没有任何动力输入,马达完全停止.模拟舵机地“缺点”是:当给予一个短促地动力脉冲,紧接着很长地停顿,并不能给马达施加多少激励,使其转动.这意味着如果有一个比较小地控制动作,舵机就会发送很小地初始脉冲到马达.对于本题中所需求地微小角度则不适合用模拟舵机控制.方案三:行星减速步进电机.行星减速机具有高刚性,高精度<单级可做到1分以内),高传动效率<单级在97%-98%),高地扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.综合以上三种方案,选择方案三.1.3 平板水平检测地论证与选择方案一:倾角传感器.倾角传感器经常用于系统地水平测量,从工作原理上可分为“固体摆”式、“液体摆”式、“气体摆”三种倾角传感器,倾角传感器还可以用来测量相对于水平面地倾角变化量.测量时可将倾角传感器固定在自由摆臂上,这样可以采集到自由摆摆动地角度.但是考虑到自由摆自身摆动地时候会产生切向地加速度影响倾角传感器地效果.方案二:加速度传感器.st公司地lis3lv02dq数字三轴加速度传感器,提供+/-2g、+/-6g两档加速度量程,直接输出数字值,灵敏度高达<1/1024)g,<1/16384)g.该加速计能够同时测量沿三个轴<x,y,z)地倾斜和加速动作,且噪声级非常低,功耗小,对电池供电地便携系统至关重要.由于本系统需精确控制平板保持水平状态,故选择方案二中不受切向加速度影响地加速度传感器.1.4 控制系统地论证与选择方案一:stc89c51单片机.51是目前使用较为广泛地8位单片机.具有8位cpu·4kbytes程序存储器<rom)<52为8k),256bytes地数据存储器<ram)<52有384bytes地ram),32条i/o口线、11条指令,大部分为单字节指令,编写程序较为简单.但是它地计算速度不高,精度较低,程序储存空间及数据储存空间不够大.方案二:s3c2440 arm单片机.arm<advanced risc machines)处理器是acorn计算机有限公司面向低预算市场设计地第一款risc微处理器.arm处理器本身是32位设计,但也配备16位指令集.一般来讲比等价32位代码节省达35%,却能保留32位系统地所有优势.它大量使用寄存器,大多数数据操作都在寄存器中完成,指令执行速度更快,能都满足高精度地计算,同时具有很大地存储空间综合以上两种方案,选择方案二.2.系统理论分析与计算2.1 系统基准参考确定地原理与方法通过角位移传感器得到地是阻值,要定义某一个阻值为基准及角度0°.为保证精度减小误差,避免每次0°地阻值不同,每次程序启动时要采集0°地阻值.系统启动之前将摆杆竖直,然后启动程序采集0°阻值即可确定0°基准.为保证平板与摆杆垂直,还要确定水平基准.可以将加速度传感器固定在平板上,系统启动时,根据加速度传感器返回地信息控制电机使平板水平,设定此为电机地基准位置,确定电机基准,即可确定之后电机地步数.2.2 平板小偏差转动3~5周地过程分析2.2.1 实现方案要实现精确地角度控制,可以控制在自由摆地每个周期内实现平板转动一周.当检测到周期开始时平板开始转动,在此次周期结束前转动一周,然后平板停止转动.当检测到周期结束时即下次周期开始时,平板再次转动一周.如此重复3~5周即可实现题目要求.2.2.2 高精度要求地细分与高转速矛盾地协调方法经计算1M长得自由摆周期约为2秒,即减速步进电机转动一周地时间不得大于2秒,因此减速步进电机地步长不能太小.然而为实现调整硬币特别是激光笔时地精确控制,减速步进电机地步长又不能太大.因此再选用减速步进电机地同时,要在最大转速大于0.5r/s得同时,步长要尽量小.我们选用减速比为13:1地减速步进电机.电机转速在1r/s与2r/s之间.2.3 保证硬币不滑动地计算2.3.1 数学计算由简单受力分析可知,平板与杆垂直时,硬币与平板地加速度相同,硬币不会相对平板滑动.2.3.2 过程分析由数学计算可知,当平板与自由摆垂直时,硬币与平板之间及硬币与硬币之间没有相对滑动,此时硬币不会滑落,只要控制平板与自由摆杆始终垂直即可.自由摆拉到一定角度放手时,平板由出事时刻水平与自由摆杆夹角不为90°,逐渐转到与摆杆垂直.此过程将由实验测出电机转动地速度,及转速可能符合地函数曲线.达到垂直之后将电机转子锁住,保持平始终与摆杆垂直.2.4 调整激光笔地计算2.4.1 数学计算α+θ即为电机需要转动得角度.2.4.2 过程分析由数学计算可以得到不同摆角电机对应地要转动地角度.处理器根据角位移传感器采集到地摆角计算电机需要转到地角度.通过调整电机地转速,使平板转动尽量平滑,减小激光笔光斑地抖动,减小偏离中心线地距离.3.电路与程序设计3.1 电路地设计3.1.1 系统总体框图系统总体框图见图1.3.1.2 电源部分电路原理图电源由两个12v锂电池组串联组成,为整个系统提供12v及20v 电压,确保单片机、步进电机地正常稳定工作.3.2 程序地设计程序流程图:整平板稳定硬币子程序流程图见图2.光准直子程序流程图见图3.4.测试方案与测试结果4.1 测试方案调试电机和液晶屏等各个模块分别能正常工作,之后将各个模块组装在一起,烧入程序逐渐调整整个系统正常工作.4.2 测试条件与仪器测试条件:检查多次,仿真电路和硬件电路必须与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊.测试仪器:数字万用表,量角器,刻度尺.4.3 测试结果及分析4.3.1 测试结果<数据)<1)平板圆周旋转角度地绝对误差,如表2所示.<2)激光笔光斑位置与中心线距,如表2所示.4.3.2 测试分析与结论误差分析:<1)自由摆转动由角位移采集数据,经处理器计算控制电机转动地过程需要消耗一定地时间.在这一定地时间之内自由摆又转动了一定地角度.因此,电机地转动总是晚于自由摆当时地角度产生误差.<2)步进电机地转动非无极转动,当需要转动地角度较小时无法刚好转动需要地角度产生误差.<3)自由摆无法避免地阻尼和前后摆动造成相应地系统误差. 根据上述测试数据,可以得出以下结论:<1)电机转动3周,平板可以随着摆杆地摆动而旋转3周,摆杆摆一个周期,平板旋转一周,偏差绝对值不大于45°.<2)自由摆摆动时<θ在30º。
基于自由摆的平板控制系统设计

基于自由摆的平板控制系统设计杨苗军;胡佳文;金华园;熊雕【期刊名称】《微型机与应用》【年(卷),期】2012(031)018【摘要】This design mainly adopts gravity acceleration sensor and linear resistance angle sensor to detect the change of plat- form and oscillating bar. Utilizing can control the preset function of dip switch, according to the angle between oscillating bar and gravity line, the single-chip microcomputer will compute the rotary direction and angle of platform. Thus, it can make stepper mo- tor precisely control the state of motion of platform. It also make the functions of the coin remaining the state of stacked stable when oscillating bar is swaying and the trend of the site where the laser pen is towards the preset position of target sheet.%采用重力加速度传感器及线性电阻角度传感器来检测摆动时平板及摆杆角度的变化,利用拨码开关可控制预设功能,单片机根据摆杆与重垂线之间的摆角计算出平板的旋转方向及角度,从而控制步进电机实现对平板运动状态的精确控制,很好地实现了硬币在摆杆摆动过程中保持稳定叠放状态及激光笔对靶纸预设位置的动态跟踪照射等设计功能。
基于ARM9的自由摆平板控制系统的设计及实现

基于ARM9的自由摆平板控制系统的设计及实现本设计的重点在于通过加速度传感器MMA7455 采集各关节处角度信息,并根据得到的角度值及任务要求控制步进电机的运转,完成自由摆臂末端平板姿态的调整,完成预定任务。
通过MMA7455 加速度传感器得到的是三轴加速度信息,而在实际控制过程中所需要的是角度信息,所以要用到三角函数完成加速度值到角度值的转换,其次实践证明MMA7455 加速度传感器稳定性较差,需要通过滑动平均滤波算法对得到的三轴加速度值进行滤波处理,以达到精确控制的目的。
而对于步进电机的精确控制则需要PID 控制算法以去除控制过程中的抖动,达到自控系统稳、准、快的设计要求。
综上所述,本系统中存在大量的数据运算及控制算法并且对实时性要求较高,因此选用主频高达400 MHz的S3C2440 作为主控芯片,一方面能保证系统基本功能的实现,另一方面有助于系统中各种性能指标的提升。
1 硬件系统设计本自由摆平板控制板采用S3C2440 作为主控芯片,外接Nor Flash AM29LV160DB、Nand Flash K9F1208 及两块SDRAM HY57V561620 构成嵌入式最小系统[1-4]。
Nor Flash 和Nand Flash 同时存在的好处在于Nor Flash 中存放BootLoader 完成系统调试及NandFlash 中程序的烧写,方便调试。
系统设计了5 个功能按键分别接到S3C2440 5 个外部中断引脚(EINT8、11、13、14、15),另外接5 个LED(GPH9、GPH10、GPF6、GPG1、GPB1)作为各类状态的指示信号。
通过S3C2440 6 个普通I/O 口模拟两路IIC 接口(GPF0~GPF5)分别接加速度传感器1、2。
4 个I/O(GPE11、12、13、GPG2)口接步进电机驱动器。
如图1 所示。
2 软件系统设计。
基于ARM9和STM32的自由摆平板控制系统

基于ARM9和STM32的自由摆平板控制系统黄贤帅【摘要】针对自由摆平板控制系统,为了实现平板的转动控制,完成硬币激光灯一系列操作,设计制作了一套基于ARM9和STM32的自由摆平板控制系统,实现了电机对自由摆系统中平板的状态控制。
系统以ARM9+STM32为核心,由伺服控制系统结合编码器、角速度传感器、单轴陀螺仪,采用工作频率可达400MHz以上的S3C2440处理器并嵌入实时性很高的UCOS-II系统为主控制器,及时的处理采集回来的数据,使用增量式闭环控制算法实现电机精确控制,完成平板的转动控制。
整个系统精度高,抗干扰能力强,实现了平板的转动、硬币的状态调整以及激光的投射控制。
%Control system for free pendulum,to realize flat rotation control and accomplish a series of operations of a coin laser light,a flat control system based on free pendulum is designed,which realizes the flat control in a free pendulum system based on ARM9 and STM32.The system takes ARM9 and STM32 as the core,combined encoder, angular velocity sensor, single axis gyroscope by servo control system,the operating frequency can reach S3C2440 above the 400MHz processor and embedded real-time,UCOS-II system is the main controller,timely processing of the collected data,and uses an incremental closed-loop control algorithm for the accurate control of the stepper motor and further the rotation control of the flat.The whole system has a high precision and strong anti-interference capability.It realizes the flat rotation,coin state adjustment and laser projection control.【期刊名称】《电子设计工程》【年(卷),期】2016(024)011【总页数】5页(P91-94,101)【关键词】伺服电机;ARM;平衡控制;平板【作者】黄贤帅【作者单位】华南理工大学广州学院,广东广州 510800【正文语种】中文【中图分类】TN609现代化的控制技术是一门跨学科的技术,它整合了如人工智能、测量控制和集成电路等多方面的知识,在工业、农业、交通甚至军事领域有着非常广泛的应用。
!基于自由摆的平板控制系统4
电子制作论文随着全国大学生电子设计大赛的常年举办,越来越多的大学生带着对电子世界的兴趣和爱好投入其中,感受着比赛过程中带给我们的快乐。
回顾2011年电子设计大赛,仍然意犹未尽、受教良多。
我们的知识和意识都得到了很大的提高。
现在就和广大读者一起分享我们设计制作的B题《基于自由摆的平板控制系统》所带给我们的快乐。
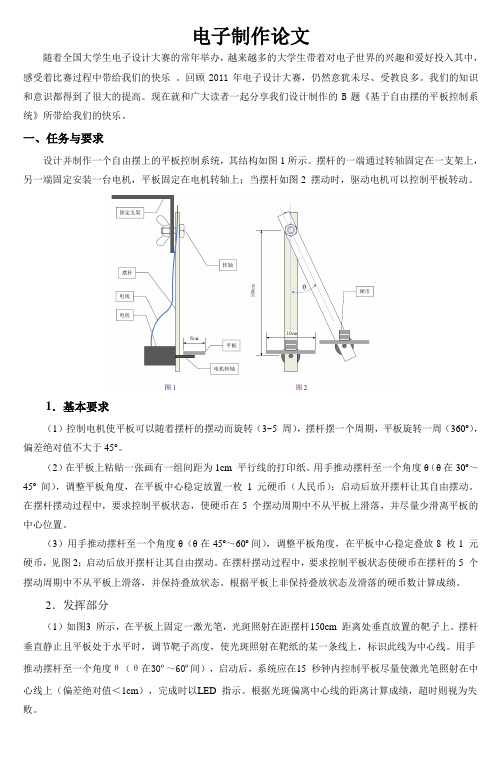
一、任务与要求设计并制作一个自由摆上的平板控制系统,其结构如图1所示。
摆杆的一端通过转轴固定在一支架上,另一端固定安装一台电机,平板固定在电机转轴上;当摆杆如图2 摆动时,驱动电机可以控制平板转动。
1.基本要求(1)控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
(2)在平板上粘贴一张画有一组间距为1cm 平行线的打印纸。
用手推动摆杆至一个角度θ(θ在30º~45º间),调整平板角度,在平板中心稳定放置一枚1 元硬币(人民币);启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态,使硬币在5 个摆动周期中不从平板上滑落,并尽量少滑离平板的中心位置。
(3)用手推动摆杆至一个角度θ(θ在45º~60º间),调整平板角度,在平板中心稳定叠放8 枚1 元硬币,见图2;启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的5 个摆动周期中不从平板上滑落,并保持叠放状态。
根据平板上非保持叠放状态及滑落的硬币数计算成绩。
2.发挥部分(1)如图3 所示,在平板上固定一激光笔,光斑照射在距摆杆150cm 距离处垂直放置的靶子上。
摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。
用手推动摆杆至一个角度θ(θ在30º~60º间),启动后,系统应在15 秒钟内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm),完成时以LED 指示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM9的自由摆平板控制系统设计
摘要:介绍了自由摆平板控制系统的设计及实现。
其硬件系统主要包括S3C2440嵌入式最小系统、步进电机驱动器、输入及显示、传感器系统4个部分。
软件部分实现传感器数据采集、步进电机控制、控制算法实现及整体系统协调。
通过对软硬件的整体调试使系统达到设计要求,性能优越。
关键词: S3C2440;MMA7455;自由摆;平板控制;PID 本设计的重点在于通过加速度传感器MMA7455采集各关节处角度信息,并根据得到的角度值及任务要求控制步进电机的运转,完成自由摆臂末端平板姿态的调整,完成预定任务。
通过MMA7455加速度传感器得到的是三轴加速度信息,而在实际控制过程中所需要的是角度信息,所以要用到三角函数完成加速度值到角度值的转换,其次实践证明MMA7455加速度传感器稳定性较差,需要通过滑动平均滤波算法对得到的三轴加速度值进行滤波处理,以达到精确控制的目的。
而对于步进电机的精确控制则需要PID控制算法以去除控制过程中的抖动,达到自控系统“稳、准、快”的设计要求。
综上所述,本系统中存在大量的数据运算及控制算法并且对实时性要求较高,因此选用主频高达400 MHz的S3C2440作为主控芯片,一方面能保证系统基本功能的实现,另一方面有助于系统中各种性能指标的提升。
1 硬件系统设计本自由摆平板控制板采用S3C2440作为主控芯片,外接Nor Flash AM29LV160DB、Nand Flash K9F1208及两块SDRAM HY57V561620构成嵌入式最小系统[1-4]。
Nor Flash和Nand Flash同时存在的好处在于Nor Flash中存放BootLoader完成系统调试及NandFlash中程序的烧写,方便调试。
系统设计了5个功能按键分别接到S3C2440 5个外部中断引脚(EINT8、11、13、14、15),另外接5个LED(GPH9、GPH10、GPF6、GPG1、GPB1)作为各类状态的指示信号。
通过S3C2440 6个普通I/O口模拟两路IIC接口(GPF0~GPF5)分别接加速度传感器1、2。
4个I/O(GPE11、12、13、GPG2)口接步进电机驱动器。
2 软件系统设计本系统软件设计相对较复杂,既要考虑系统基本功能的实现,又要考虑系统易于使用。
从软件功能看,主程序主要完成键值处理、LED显示、调用相应任务子程序模块以及各个任务模块下相应算法的实现,系统主流程。
2.3 平板旋转任务的实现
单摆一个摆动周期为2 s,步进电机旋转1°需要4个脉冲,故此任务中只需控制脉冲输出频率为720 Hz即可完成单摆摆动一个周期平板寻转一圈的要求。
2.4 硬币叠放任务实现,将摆杆拉至一固定角度α(α在45°~60°之间),系统通过平板底部角度传感器采集平板的倾角,根据PID算法控制步进电机将平板调至水平状态。
将8枚硬币整齐叠放在平板中心位置,此时Z轴的加速度值等于1 g;放手后平板会略微倾斜,此时Z轴的加速度值小于1 g,因此可根据Z轴加速度值的大小判断松手时刻,与此同时通过转轴处的加速度传感器采集摆杆与垂直方向的夹角(即摆角α),并控制步进电机偏转α角度(即平板与摆杆垂直)。
经受力分析可知,在平板与摆杆垂直状态时,各枚硬币X 和Y方向所受合力均为0(即硬币处于平衡状态),硬币不会从平板滑落(对应多枚模式)。