弹性力学第五章第五章弹性力学求解方法与一般性原理
弹性力学5PPT课件
叠加原理的适用范围
适用于线弹性范围内的小变形问题,对于非线性问题或大变形问题,叠加原理不再适用。
叠加原理的应用举例
利用叠加原理求解复杂载荷下的梁的弯曲问题,可以将复杂载荷分解为几个简单载荷, 分别求出每个简单载荷下的弯曲变形,然后叠加得到最终结果。
03
平面问题求解方法
平面应力问题与平面应变问题
平面应力问题
分析薄板在面内荷载作用 下的应力、变形和稳定性。
平面应变问题
研究长柱体或深埋在地下 的结构物,在垂直于轴线 或地面的荷载作用下,其 横截面内的应力和变形。
两者区别
平面应力问题中,垂直于 板面的应力分量可忽略不 计;而平面应变问题中, 该应力分量不可忽略。
功的互等定理与卡氏定理的应用举例
利用功的互等定理可以求解某些复杂结构的位移和应力问题;利用卡氏 定理可以求解某些特殊载荷作用下的应力问题。
虚功原理与最小势能原理
虚功原理的基本内容
在弹性力学中,外力在虚位移上所做的功等于内力在虚应变上所做的功。这里的虚位移和虚应变是指满足几何约束和平衡 条件的任意微小的位移和应变。
复变函数的引入
利用复变函数的性质,可将平面 弹性力学问题中的偏微分方程转 化为复变函数的解析函数问题。
保角变换
通过保角变换,可将复杂形状的 平面区域映射为简单形状的区域, 从而简化问题的求解。
边界条件的处理
在复变函数法中,边界条件的处 理是关键步骤之一,需要根据具 体问题选择合适的处理方法。
差分法和有限元法在平面问题中的应用
边界条件处理
阐述有限元法中边界条件的处理方法, 如固定边界、自由边界、对称边界等。
弹性力学课件

弹性力学的研究对象主要是弹性 体,即在外力作用下能够发生变 形,当外力去除后又能恢复到原 来形状的物体。
弹性体基本假设与约束条件
基本假设
弹性体在变形过程中,其内部各点间 距离的变化是微小的,且这种变化不 影响物体的整体形状和大小。
约束条件
弹性体的变形受到外部约束条件的限 制,如支撑、连接等,这些约束条件 对弹性体的变形和内力分布产生影响 。
2
例题2
无限大平板受均布载荷作用下的应力分 析。利用弹性力学理论求解无限大平板 在均布载荷作用下的应力分布,并讨论 平板厚度对应力分布的影响。
3
例题3
圆柱体受内压作用下的应力分析。通过 解析法或数值法求解圆柱体在内压作用 下的应力分布,并讨论不同材料属性和 几何参数对应力分布的影响。
03
弹性体变形协调方程与几何方程
3
讨论
通过对比各向同性和各向异性材料的力学行为, 加深对材料本构关系的理解。
05
平面问题求解方法与应用举例
平面问题定义及分类
平面应力问题
长柱形物体受平行于横截面的外力作用,横截面尺寸远小于轴向 尺寸。
平面应变问题
平面或板状物体受平行于中面的外力作用,中面尺寸远大于厚度。
平面问题的简化
忽略体力,将空间问题简化为平面问题。
各向异性材料本构关系简介
各向异性假设
材料在各个方向上具有不同的力学性质。
本构关系特点
应力与应变之间的关系复杂,需要考虑材料的方 向性。
典型各向异性材料
纤维增强复合材料、层合板等。
典型例题解析与讨论
1 2
例题一
求解各向同性材料在简单拉伸条件下的应力和应 变。
例题二
分析各向异性材料在复杂应力状态下的力学行为 。
弹塑性力学 第05章弹性力学问题的建立和一般原理
应力分量
M O
τ xz = −αGy ,τ yz = αGx σ x = σ y = σ z = τ xy = 0
代入平衡微分方程
τ zy
ϕ
τ
x
τ zx
∂σ x ∂τ yx ∂τ zx + + + Fbx = 0 ∂x ∂y ∂z ∂τ xy ∂σ y ∂τ zy + + + Fby = 0 ∂x ∂y ∂z ∂τ xz ∂τ yz ∂σ z + + + Fbz = 0 ∂x ∂y ∂z
假设弹性体受已知体力作用,在物体的边界上,或者面 力已知,或者位移已知,或者一部分上面力已知,而另一部 分上位移已知,则弹性体平衡时,体内各点的应力分量与应 变分量是唯一的,对于后两种情形,位移也是唯一的。
这一定理以这样一个假设为依据:当物体不受外力作用 时,体内的应变能为零,应力分量和应变分量也全为零。当
∫∫τ
∫∫τ
zx
dxdy = 0
dxdy = 0
M O
τ zy
ϕ
τ
x
zy
M = ∫∫ (xτ zy − yτ zx )dxdy
将应力分量代入
τ zx
τ yz = αGx
y
τ xz = −αGy
σ x = σ y = σ z = τ xy = 0
∫∫τ zx dxdy = 0
∫∫τ
zy
τ xz = −αGy
1 ε ij = (1 +ν )σ ij −νσ kk δ ij E
或
[
]
σ ij = λε kk δ ij + 2Gε ij
弹性力学-05(变分法)
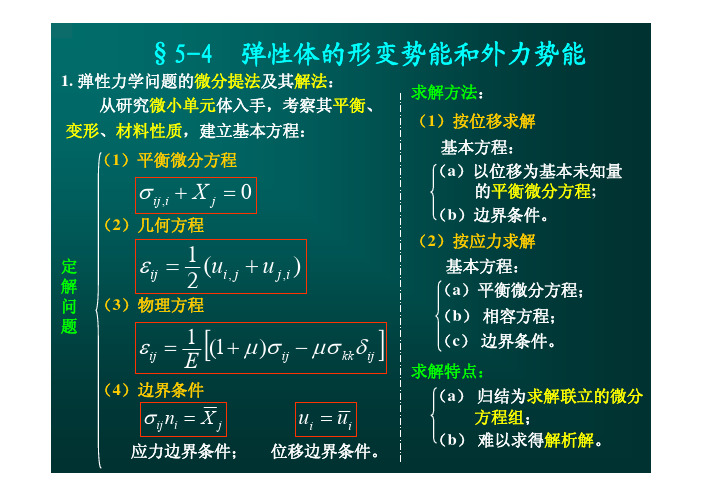
微分提法解法(1)平衡微分方程,=+j i ij X σ(2)几何方程)(21,,i j j i ij u u +=ε(3)物理方程[]ij kk ij ij Eδμσσμε−+=)1(1(4)边界条件ji ij X n =σii u u =定解问题求解方法(1)按位移求解(平衡微分方程(2)按应力求解(((((求解联立的微分方程组求解特点:(解析解微小单元平衡变形材料性质§5-4 弹性体的形变势能和外力势能变分提法解法基本思想:所有可能的解求解线性方程组整个弹性系统能量关系变分方程在给定约束条件下求泛函极(驻)值的变分问题能量法(a )以位移为基本未知量,得到最小势(位)能原理等。
(b )以应力为基本未知量,得到最小余能原理等。
(c )同时以位移、应力、应变为未知量,得到广义(约束)变分原理。
——位移法——力法有限单元法边界元法离散元法数值解法求解方法数值解法基本思想:导数差分求解线性方程组实质:变量离散变分方程区域离散单元可能解求解大型的线性方程组有限单元法边界单元法离散单元法1. 形变势能的一般表达式Px单向拉伸:1形变势能()U 11l l A P Δ11比能三向应力状态:σσyσzyzτzy τyxτxyτxz τzx τ三向应力状态:σσyσzyzτzy τyxτxyτxz τzx τ次序无关形变比能y y x x εσεσ111++yz yz zx zx τγτγ++1形变势能:2. 形变势能的应变分量表示)(12x y y E μεεμσ+−=)(12y x x E μεεμσ+−=xy xyE γμτ)1(2+=22212122(1)2xy x y xy E U μεεμεεγμ−⎡⎤=+++⎢⎥−⎣⎦2x y x y εεμεε+++⎢111表明:3. 形变势能的位移分量表示222121()()2()2(1)2E u v u v u v U x y x y x y μμμ⎡⎤∂∂∂∂−∂∂=++++⎢⎥−∂∂∂∂∂∂⎣⎦()()2(μ++++⎢外力的虚功:;,,Z Y X ZY X ,,Xu Yv +Xu Yv +由于外力做的功消耗了外力势能,因此,在发生实际位移时,弹性体的外力势能为:§11-2 位移变分方程1. 泛函与变分的概念(1)泛函的概念xF泛函P1)(xMEIB l x泛函形变势能泛函(2)变分与变分法自变量的增量函数增量微分问题P1)(xMEIBlx)(xy)(xy yδP1)(xMEIB lx ) (xy)(xy yδ自变函数的增量泛函的增量变分问题变分的运算变分与微分运算:)(x f =⎟)(x f =⎟)(x f =⎟⎟变分运算与微分运算互相交换变分与积分运算:变分运算与积分运算互相交换复合函数的变分:y δ+复合函数的变分:y δ+⎢++⎥⎢′+y y y y δδδδ极大值极小值2. 位移变分方程形变势能位移变分qP应力边界S σ满足:平衡方程、几何真实解(1)任给弹性体一微小的位移变化:wv u δδδ,,满足两个条件:((wv u δδδ,,满足两个条件:((qP应力边界S σw位移的变分虚位移由于位移的变分,引起的外力功的变分和外力势能的变分为:X u Y δδ+X u Y δδ+微小的为约束所允许(2)考察弹性体的能量变化从而引起形变势能的变分为:()()()y xy u v u δδεδδγδ==+,,由于位移的变分,引起的应变的变分为:设:位移变分方程Lagrange 变分方程WU δδ=X u Y δδ+它表明:在实际平衡状态发生位移的变分时,物体形变势能的变分,等于外力在虚位移上所做的虚功。
弹性力学简介及其求解方法

弹性力学简介及其求解方法2010-08-27弹性力学简介及其求解方法弹性力学又称弹性理论,是固体力学的一个分支,是研究弹性体由于外力作用或温度改变等原因而发生的应力、应变和位移。
确定弹性体的各质点应力、应变和位移的目的就是确定构件设计中的强度和刚度指标,以此用来解决实际工程结构中的强度、刚度和稳定性问题。
材料力学、结构力学三门学科所研究的内容和目的相同,但是研究对象和研究方法不同。
材料力学研究对象是杆状构件,结构力学是在材料力学基础上研究由多杆构成的杆系结构的强度和刚度问题。
而对于一般弹性实体结构,如板与壳结构、挡土墙与堤坝、地基以及其他三维实体结构来说,相应的强度和刚度问题要用弹性理论的方法来解决。
在研究方法上,弹性力学和材料力学都从静力学、几何关系、物理方程三方面着手来进行分析,但不同点是材料力学常借助于直观和实验现象做一些假设。
在具体问题计算时材料力学与结构力学都利用解决单一变量的常微分方程,在数学上求解容易。
弹性力学需解决的是满足边界条件的高阶多变量偏微分方程,在数学上求解困难,一般弹性体问题很难得到解析解。
所以,与材料力学相比,弹性力学的研究对象更加广泛,研究方法更加严密,能解决更加复杂的实际问题,因此需要用较多的数学工具。
弹性力学问题可以归结为边值问题:在弹性体内必须满足基本方程,即平衡微分方程、几何方程和物理方程;在应力边界上应满足应力边界条件;在位移边界上应满足位移边界条件;在混合边界上应满足相应的应力边界和位移边界条件。
满足基本方程的解答叫做弹性力学解;既满足基本方程,又满足边界条件的解答叫做弹性力学问题的解。
在求解弹性力学问题时,通常已知的是物体的形状、尺寸、约束情况和外载荷以及材料的物理常数。
需要求解的是应力、应变和位移,它们都是物体内点的坐标的函数。
对于空间问题,一共有15个未知函数:3个位移分量、6个应变分量和6个应力分量。
可利用的独立方程也有15个,即3个平衡微分方程、6个几何方程和6个物理方程。
弹性力学的概念

经典弹性力学建立
17世纪末到18世纪初,R·胡克、C·惠更斯 、L·欧拉和J·伯努利等人建立了经典的弹性 力学理论,奠定了弹性力学的基础。
弹性力学应用领域
工程领域
材料科学
弹性力学广泛应用于各种工程领域,如建 筑、桥梁、道路、隧道、航空航天等,用 于分析和设计各种结构物。
弹性力学对于研究材料的力学性能和变形 行为具有重要意义,为材料科学的发展提 供了理论基础。
组分、结构等因素变化。
智能材料
03
如压电材料、形状记忆合金等,其力学行为与电场、磁场、温
度等外部条件密切相关,对弹性力学提出新的挑战。
复杂环境下弹性力学问题
极端环境
如高温、低温、高压、 真空等极端环境下,材 料的弹性力学行为可能 发生变化,需要研究相 应的理论和实验方法。
多场耦合
在力、热、电、磁等多 场耦合作用下,材料的 弹性力学响应更加复杂 ,需要建立多场耦合的 弹性力学模型。
泊松比
又称横向变形系数,是反映材料在受到纵向压缩或拉伸时,横向应变与纵向应变 比值的物理量。泊松比越大,说明材料在受到纵向力时横向收缩或膨胀越明显。
应力集中与应力分布
应力集中
在物体内部,由于形状、尺寸或材料性质等原因,某些部位 的应力可能显著高于其他部位,这种现象称为应力集中。应 力集中容易导致物体在局部范围内发生破坏。
地震学
生物力学
弹性力学在地震学中也有重要应用,用于 研究地震波在地球内部的传播规律和地震 引起的地面振动等问题。
生物力学是研究生物体运动和变形的学科, 弹性力学为其提供了基本的理论和方法。
02
弹性力学基本概念
CHAPTER
应力与应变概念
应力
物体内部单位面积上所承受的力,表示物体内部某一点的受力状态。应力分为 正应力和切应力,正应力与截面垂直,切应力与截面平行。
弹性力学第五章:弹性力学解法
2(1 ) E 2(1 ) E 2(1 ) E
E
xy yz zx
y
z
或用张量缩写表示为
ij kk
(b). 用应变表示应力的关系式
x 2G x y 2G y z 2G z
x l xy m xz n p x yx zx
或:
l y m yz n p y l zy m z n p z
S 上)
pi ij n j (在
(b).位移边条件:
1. 位移法: 以位移分量 u , v, w 作为基本未知量。
由位移表示的平衡方程式及边界条件
先求出位移分量 几何方程 应变分量
物理方程
应力分量
在结构力学和 有限元中常用
2. 应力法:
在弹性力学中该方法广泛使用
以应力分量作为基本未知量, 平衡方程及边界条件
ij
物理方程
ij
几何方程
u , v, w
2
yz
xz
应力协调方程
应力协调方程
x
2
1 1 1 1 1 1 1 1 1 1 1 1
y
2
z
2
xy
2
yz
2
zx
2
f x 2 1 x y z x x 2 f y f y f x f z ( )2 2 1 x y z y y 2 f y f x f z f z ( )2 2 1 x y z z z 2 f y f x ( ) xy x y 2 f y f z ( ) yz y z 2 f x f z ( ) xz z x
弹塑性力学第五章线弹性力学问题的基本解法和一般性原理

*
§5-1 基本方程和边界条件的汇总
a. 几何方程
指标符号表示
衣凹啦修仪让洛莉攘擞沥庶利礼通谊耸跑观值帧淡敞商蹲注献蔑摔铀嘻针《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理
*
*
b. 变形协调方程
指标符号表示
§5-1 基本方程和边界条件的汇总
*
*
§5-2 位移法
上式代入平衡微分方程,得到位移法的基本方程
在V上
或
在V上
(拉米-纳维叶方程)
及芽孰松茄桔甭稿窒刮录羌格累态赡傀眉守恐苟究屏巩掠冗课阿朴错卡吞《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理
*
*
§5-2 位移法
1.3 本构(物理)方程(六个)
指标符号表示
上述所有方程为 ij 、 ij、ui在V上必须满足的方程,同时在S上(边界上)有边界力或边界位移。
必局洲斟死法广呆坞渤扣图审漓逆乓湾浩嗣废桥调擒卢贸违晶那舀乍汞跟《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理
*
*
§5-2 位移法
力的边界条件转为用ui的偏微分表示的。这类边界条件从形式上看可以处理,但实际操作上有时较难处理。
撩末辰问苯接恒辙肾顿陶说马证以毕石钢编岗宿捷丹腮敖笆崖蒸司群戒俏《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理《弹塑性力学》第五章 线弹性力学问题的基本解法和一般性原理
*
*
§5-2 位移法
位移法求解思想:
弹性力学ppt课件

应变定义
物体在外力作用下产生的 形变,表示物体尺寸和形 状的变化。
应力与应变关系
应力与应变之间存在一一 对应关系,通过本构方程 来描述。
广义胡克定律及应用
1 2
广义胡克定律 又称作弹性本构关系,表示应力与应变之间的线 性关系。
广义胡克定律的应用 用于计算弹性体在复杂应力状态下的应力和应变, 是弹性力学中的重要基础。
弹性力学ppt课件
contents
目录
• 弹性力学概述 • 弹性力学基本原理 • 线性弹性力学问题求解方法 • 非线性弹性力学问题简介 • 弹性力学实验方法与技术应用 • 弹性力学在相关领域拓展应用
01 弹性力学概述
弹性力学定义与研究对象
弹性力学定义
弹性力学是研究弹性体在外力和其他 外界因素作用下产生的变形和内力, 从而在变形与外力之间建立一定关系 的科学。
有限元法在弹性力学中应用
有限元法基本原理
将连续体离散化为有限个单元,每个单元用简单的函数近似表示,通 过变分原理得到有限元方程。
有限元法求解过程
包括网格划分、单元分析、整体分析、边界条件处理和求解有限元方 程等步骤。
有限元法的优缺点
有限元法可以求解复杂几何形状、非均质材料和非线性问题,但存在 网格划分和计算精度等问题。
布。
弹性模量和泊松比测定实验
拉伸法
通过对标准试件进行拉伸实验,测量试件的应力和应变,从 而计算得到弹性模量和泊松比。
压缩法
通过对标准试件进行压缩实验,测量试件的应力和应变,进 而计算弹性模量和泊松比,适用于脆性材料的测量。
弯曲法
通过对梁式试件进行三点或四点弯曲实验,测量试件的挠度 和应力,从而推算出弹性模量,特别适用于细长构件的测量。
弹性力学-第5章 有限元法
(a)从上到下建模 从生成体(或面)开始,并结合其它方
法生成最终的形状。
加
用于产生最终形状的合并称为布尔运算
提示: 当生成二维体素时,ANSYS定义一个面及其它所包含 的线和关键点。当生成三维体素时,ANSYS定义一个 体及其所包含的面、线及关键点。 如果低阶的图元连在高阶图元上,则低阶图元不能删除.
§5-2 建模
一. 有限元模型的建立
a.建模的方法 b.坐标系统与工作平面 c.实体建模
1.建模方法
有限元模型的建立方法可分为: (1)直接法
直接根据机械结构的几何外型建立节点和单元,因此直接 法只适应于简单的机械结构系统。
(2)间接法(Solid Modeling)
适用于节点及单元数目较多的复杂几何外型机械结构系 统。该方法通过点、线、面、体积,先建立实体模型, 再进行网格划分,以完成有限元模型的建立。
第五章 有限元法解平面问题
§5-1有限元法简介 一. 有限元法的基本思想
1.将连续的问题域离散为有限数目的单元; 2.单元之间通过节点相连; 3.每一个单元都有精确的方程来描述它如何对一定载 荷去响应; 4.单元内部的待求量可由单元节点量通过选定的函数 关系插值得到; 5.模型中所有单元的响应之和给出设计的总响应。
由于单元形状简单,易于建立节点量的平衡关系和能量关 系方程式,然后将各单元方程集组成总体代数方程组,计 入边界条件后可对方程求解。
二. 有限元法的位移解法 1.有限元法的单元和节点
1.有限元法的单元和节点 2.有限元的基本未知量(DOFs) 3.单元形函数
节点自由度是随 单元类型 变化的。
J 三维杆单元 (铰接) UX, UY, UZ
(整理)弹性力学第五章第五章弹性力学的求解方法和一般性原理
第五章弹性力学的求解方法和一般性原理知识点弹性力学基本方程边界条件位移表示的平衡微分方程应力解法体力为常量时的变形协调方程物理量的性质逆解法和半逆解法解的迭加原理,弹性力学基本求解方法位移解法位移边界条件变形协调方程混合解法应变能定理解的唯一性原理圣维南原理一、内容介绍通过弹性力学课程学习,我们已经推导和确定了弹性力学的基本方程和常用公式。
本章的任务是对弹性力学所涉及的基本方程作一总结,并且讨论具体地求解弹性力学问题的方法。
弹性力学问题的未知量有位移、应力和应变分量,共计15个,基本方程有平衡微分方程、几何方程和本构方程,也是15个。
面对这样一个庞大的方程组,直接求解显然是困难的,必须讨论问题的求解方法。
根据这一要求,本章的主要任务有三个:一是综合弹性力学的基本方程,并按边界条件的性质将问题分类;二是根据问题性质,确定基本未知量,建立通过基本未知量描述的基本方程,得到基本解法。
弹性力学问题的基本解法主要是位移解法、应力解法和混合解法等。
应该注意的是对于应力解法,基本方程包括变形协调方程。
三是介绍涉及弹性力学求解方法的一些基本原理。
主要包括解的唯一性原理、叠加原理和圣维南原理等,这些原理将为今后的弹性力学问题解建立基础。
如果你在学习本章内容时有困难,请及时查阅和复习前三章相关内容,以保证今后课程的学习。
二、重点1、弹性力学的基本方程与边界条件分类;2、位移解法与位移表示的平衡微分方程;3、应力解法与应力表示的变形协调方程;4、混合解法;5、逆解法和半逆解法;6、解的唯一性原理、叠加原理和圣维南原理§5.1 弹性力学的基本方程及其边值问题学习思路:通过应力状态、应变状态和本构关系的讨论,已经建立了一系列的弹性力学基本方程和边界条件。
本节的主要任务是将基本方程和边界条件作综合总结,并且对求解方法作初步介绍。
弹性力学问题具有15个基本未知量,基本方程也是15个,因此问题求解归结为在给定的边界条件下求解偏微分方程。
弹性力学第五章

dW = σ ij d ε ij
(5.3) (5.4) (5.5)
W = ∫ σ ij d ε ij
0
ε ij
从式(5.3)或(5.4),可得
∂W σ ij = ∂ε ij
∂W σ ij = ∂ε ij
(5.5)
上式称为格林(Green)公式。只要已知应变能密度的具体函数形 式,就可用Green公式求出应力和应变之间的关系,即弹性材料的 本构关系。 把无应变的自然状态作为加载前物体的平衡状态,并假定这一 自然状态是稳定的平衡状态。加载后的平衡状态称为变形状态或干 扰状态。根据稳定平衡状态的定义可知,在准静态变形过程中,从 稳定的平衡状态到相邻的变形状态,外力必须做正功。从式(5.1)得
ε ij = Cijklσ kl
(5.12)
其中Cijkl称为柔度系数张量,它也有类似于式(5.8)所表示的对称性。
§5.3
各向异性弹性体
如果材料在各个方向的性质不相同,我们就说这种材料是各向 异性的。对极端各向异性弹性体,上一节已经证明只有21个独立的 弹性常数。对工程中用到的材料而言,或多或少存在一些材料性质 的对称性。下面将讨论几种常见的各向异性弹性体。 为叙述方便起见,把本构关系(5.10)改写成如下形式。 ⎧σ x = C11ε x + C12ε y + C13ε z + C14γ xy + C15γ yz + C16γ zx ⎪ ⎪σ y = C21ε x + C22ε y + C23ε z + C24γ xy + C25γ yz + C26γ zx ⎪σ z = C31ε x + C32ε y + C33ε z + C34γ xy + C35γ yz + C36γ zx ⎪ ⎨ (5.13) ⎪τ xy = C41ε x + C42ε y + C43ε z + C44γ xy + C45γ yz + C46γ zx ⎪τ yz = C51ε x + C52ε y + C53ε z + C54γ xy + C55γ yz + C56γ zx ⎪ ⎪τ zx = C61ε x + C62ε y + C63ε z + C64γ xy + C65γ yz + C66γ zx ⎩ 其中C11=E1111, C12=E1122, C14=E1112,等。由于Eijkl=Eklij,故Cij=Cji。 注意,Cij不是一个二阶张量。
弹性力学第五章第五章弹性力学的求解方法和一般性原理
弹性力学第五章第五章弹性力学的求解方法和一般性原理弹性力学是研究物质在外力作用下发生弹性变形的力学学科,其求解方法和一般性原理是该学科的重要内容。
首先,弹性力学的求解方法主要包括材料本构方程和边界条件的建立,以及解方程的方法。
材料本构方程是描述材料的力学性质和变形规律的方程。
根据材料的不同性质和变形特点,可以选用不同的本构方程。
常用的本构方程包括胡克定律、庞加莱-克莱葛尔方程等。
通过假设材料是各向同性、线弹性等,可以建立相应的本构方程。
边界条件是指在弹性力学问题中,给定的物体表面上的约束条件。
边界条件的建立是弹性力学问题求解的基础。
一般情况下,边界条件包括位移边界条件和力边界条件。
位移边界条件是指物体表面上的位移限制,力边界条件是指物体表面上的力的作用情况。
通过建立合理的边界条件,可以求解出问题的解。
解方程的方法包括解析方法和数值方法。
解析方法是指通过分析和计算得到方程的解析解,解析解有精确度高、可视化好的优点。
数值方法是指通过数值计算得到方程的数值解,数值解可以通过计算机程序进行求解,适用范围广。
其次,弹性力学的一般性原理是指弹性力学问题的基本原理和公式。
弹性力学的一般性原理包括平衡原理、相容性原理和构造方程。
平衡原理是指物体在外力作用下的平衡条件。
根据平衡原理,可以通过力的平衡方程建立弹性力学问题的公式。
平衡方程可以通过平衡力的矢量和等于零来表示。
相容性原理是指物体在变形过程中的相容性条件。
根据相容性原理,物体在变形过程中,任意两个小变形都相容。
相容性原理可以用于控制弹性力学问题的求解范围。
构造方程是用来描述物体在外力作用下的变形状态的方程。
通过对变形量的定义和方程的建立,可以得到物体的变形状态和应变状况。
综上所述,弹性力学的求解方法和一般性原理是该学科的重要内容。
求解方法包括材料本构方程和边界条件的建立,以及解方程的方法。
一般性原理包括平衡原理、相容性原理和构造方程。
弹性力学的求解方法和一般性原理的运用,能够帮助研究者解决复杂的弹性力学问题,进一步推动该学科的发展。
弹性力学第五章第五章弹性力学的求解方法和一般性原理
弹性⼒学第五章第五章弹性⼒学的求解⽅法和⼀般性原理第五章弹性⼒学的求解⽅法和⼀般性原理知识点弹性⼒学基本⽅程边界条件位移表⽰的平衡微分⽅程应⼒解法体⼒为常量时的变形协调⽅程物理量的性质逆解法和半逆解法解的迭加原理,弹性⼒学基本求解⽅法位移解法位移边界条件变形协调⽅程混合解法应变能定理解的唯⼀性原理圣维南原理⼀、内容介绍通过弹性⼒学课程学习,我们已经推导和确定了弹性⼒学的基本⽅程和常⽤公式。
本章的任务是对弹性⼒学所涉及的基本⽅程作⼀总结,并且讨论具体地求解弹性⼒学问题的⽅法。
弹性⼒学问题的未知量有位移、应⼒和应变分量,共计15个,基本⽅程有平衡微分⽅程、⼏何⽅程和本构⽅程,也是15个。
⾯对这样⼀个庞⼤的⽅程组,直接求解显然是困难的,必须讨论问题的求解⽅法。
根据这⼀要求,本章的主要任务有三个:⼀是综合弹性⼒学的基本⽅程,并按边界条件的性质将问题分类;⼆是根据问题性质,确定基本未知量,建⽴通过基本未知量描述的基本⽅程,得到基本解法。
弹性⼒学问题的基本解法主要是位移解法、应⼒解法和混合解法等。
应该注意的是对于应⼒解法,基本⽅程包括变形协调⽅程。
三是介绍涉及弹性⼒学求解⽅法的⼀些基本原理。
主要包括解的唯⼀性原理、叠加原理和圣维南原理等,这些原理将为今后的弹性⼒学问题解建⽴基础。
如果你在学习本章内容时有困难,请及时查阅和复习前三章相关内容,以保证今后课程的学习。
⼆、重点1、弹性⼒学的基本⽅程与边界条件分类;2、位移解法与位移表⽰的平衡微分⽅程;3、应⼒解法与应⼒表⽰的变形协调⽅程;4、混合解法;5、逆解法和半逆解法;6、解的唯⼀性原理、叠加原理和圣维南原理§5.1 弹性⼒学的基本⽅程及其边值问题学习思路:通过应⼒状态、应变状态和本构关系的讨论,已经建⽴了⼀系列的弹性⼒学基本⽅程和边界条件。
本节的主要任务是将基本⽅程和边界条件作综合总结,并且对求解⽅法作初步介绍。
弹性⼒学问题具有15个基本未知量,基本⽅程也是15个,因此问题求解归结为在给定的边界条件下求解偏微分⽅程。
第五章基本方程
xy
m
s
y
n
s
zy
s
fy
xz
s
m
yz
s
n z
s
fz
2)位移边界条件
u u s
在位移边界Su 上处处
给定位移约束 ui (u, v, w)
ui ui
v v s
w w s
边界条件: 域内位移场的边界值应等于给定边界值。
弹性力学问题的建立
静力( 运动) 学
变形几何学
本构关系 (物理学)
建立
弹性力学偏微分 方程的边值问题
讨论
问题的解法 解的唯一性 局部影响原理
第五章 弹性力学基本方程及原理 5-1 弹性力学问题的微分方程提法
§5-2 位移解法 §5-3 应力解法 §5-4 叠加原理 § 5-5 解的唯一性定理 §5-6 圣维南原理 §5-7 几个简单问题的解
E 1
1 2
u x
yz
E w
2(1
)
y
v
z
应力边界条件
x
s
m
yx
s
n zx
s
fx
xy
m
s
y
n
s
zy
s
fy
xz
s
m
yz
s
n z
v z
y
E 1
1
弹性力学解题方法问题
有 G 2 u i ( G ) ,ifi 0
其位移边界条件为: ui= ¯ui(x,y, z)
给定位移边界条件就可由Leme方程解出
ui=(u,v,w) 或ui=(u1, u2, u3 )
。
对于用面力表示的边界条件 Ti =σij nj
将应力位移表达式代入面力边界条件:
以上三类边值问题,代表了一些简化的实际工程问 题。 若不考虑物体的刚体位移,则三类边值问题的解 是唯一的。
基本解法
(1)位移解法: 以位移函数作为基本未知量 (2)应力解法 以应力函数作为基本未知量
(3)混合解法
以部分位移和部分应力分量作为基本未知量
5.3 弹性力学问题基本解法
位移解法的主要步骤:
即
4ui 0
由
ij
1 2(ui, j
uj,i )
有 4 ij 1 2[(4ui) ,j (4uj),i]
即 4 ij 0
由
ij 2G ij ij
有 4ij 2 G ( 4ij)( 4)ij 及 2 0
即
4 ij 0
这说明应力与应变满足双调和方程。
结论: 对于Leme方程
yz
1(wv) 2 y z
zx
1(uw) 2 z x
张量表示:
ij
1 2(ui, j uj,i )
3.本构方程:弹性体要满足的基本方程
广义胡克定律的应力表示
x
1 E
[(1
)
x
]
y
1 E
[(1
)
y
]
z
1 E
[(1
)
z
]
xy
xy
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章弹性力学的求解方法和一般性原理知识点弹性力学基本方程边界条件位移表示的平衡微分方程应力解法体力为常量时的变形协调方程物理量的性质逆解法和半逆解法解的迭加原理,弹性力学基本求解方法位移解法位移边界条件变形协调方程混合解法应变能定理解的唯一性原理圣维南原理一、内容介绍通过弹性力学课程学习,我们已经推导和确定了弹性力学的基本方程和常用公式。
本章的任务是对弹性力学所涉及的基本方程作一总结,并且讨论具体地求解弹性力学问题的方法。
弹性力学问题的未知量有位移、应力和应变分量,共计15个,基本方程有平衡微分方程、几何方程和本构方程,也是15个。
面对这样一个庞大的方程组,直接求解显然是困难的,必须讨论问题的求解方法。
根据这一要求,本章的主要任务有三个:一是综合弹性力学的基本方程,并按边界条件的性质将问题分类;二是根据问题性质,确定基本未知量,建立通过基本未知量描述的基本方程,得到基本解法。
弹性力学问题的基本解法主要是位移解法、应力解法和混合解法等。
应该注意的是对于应力解法,基本方程包括变形协调方程。
三是介绍涉及弹性力学求解方法的一些基本原理。
主要包括解的唯一性原理、叠加原理和圣维南原理等,这些原理将为今后的弹性力学问题解建立基础。
如果你在学习本章内容时有困难,请及时查阅和复习前三章相关内容,以保证今后课程的学习。
二、重点1、弹性力学的基本方程与边界条件分类;2、位移解法与位移表示的平衡微分方程;3、应力解法与应力表示的变形协调方程;4、混合解法;5、逆解法和半逆解法;6、解的唯一性原理、叠加原理和圣维南原理§5.1 弹性力学的基本方程及其边值问题学习思路:通过应力状态、应变状态和本构关系的讨论,已经建立了一系列的弹性力学基本方程和边界条件。
本节的主要任务是将基本方程和边界条件作综合总结,并且对求解方法作初步介绍。
弹性力学问题具有15个基本未知量,基本方程也是15个,因此问题求解归结为在给定的边界条件下求解偏微分方程。
由于基本方程与15个未知量的内在联系,例如已知位移分量,通过几何方程可以得到应变分量,然后通过物理方程可以得到应力分量;反之,如果已知应力分量,也可通过物理方程得到应变分量,再由几何方程的积分求出位移分量,不过这时的应变分量必须满足一组补充方程,即变形协调方程。
基于上述的理由,为简化求解的难度,可以选取部分未知量作为基本未知量求解。
根据基本未知量,弹性力学问题可以分为应力解法、位移解法和混合解法。
上述三种求解方法对应于偏微分方程的三种边值问题。
学习要点:1、弹性力学基本方程;2、本构方程;3、边界条件;4、弹性力学边值问题1、弹性力学基本方程首先将弹性力学基本方程综合如下1、平衡微分方程用张量形式描述2、几何方程用张量形式描述3、变形协调方程4、本构方程-广义胡克定律用应力表示的本构方程用应变表示的本构方程2、边界条件如果物体表面的面力F s x,F s y,F s z为已知,则边界条件应为称为面力边界条件,用张量符号表示为。
如果物体表面的位移已知,则边界条件应为称为位移边界条件。
除了面力边界条件和位移边界条件,还有混合边界条件。
综上所述,弹性力学的基本未知量为三个位移分量,六个应力分量和六个应变分量,共计十五个未知量。
基本方程为三个平衡微分方程,六个几何方程和六个物理方程,也是十五个基本方程。
这里没有考虑变形协调方程,原因是位移已经作为基本未知量。
对于任意的单值连续的位移函数,如果设其有三阶的连续导数,则变形协调方程仅仅是几何方程微分的结果,自然地满足,所以位移作为基本未知量时,不需要考虑变形协调方程。
要使基本方程有确定的解,还要有对应的面力或位移边界条件。
弹性力学的任务就是在给定的边界条件下,就十五个未知量求解十五个基本方程。
3、弹性力学边值问题当然,具体求解弹性力学问题时,并不需要同时求解十五个基本未知量,可以而且必须做出必要的简化。
根据几何方程和本构方程可见,位移、应力和应变分量之间不是相互独立的。
假如已知位移分量,通过几何方程可以得到应变分量,然后通过物理方程可以得到应力分量。
反之,如果已知应力分量,也可通过物理方程得到应变分量,再由几何方程的积分求出位移分量,不过这时的应变分量必须满足一组补充方程,即变形协调方程。
基于上述的理由,为简化求解的难度,选取部分未知量作为基本未知量。
若以位移函数作为基本未知量求解,称为位移解法;若以应力函数作为基本未知量,称为应力解法;若以部分位移分量和部分应力分量作为基本未知量,称为混合解法。
在给定的边界条件下,求解偏微分方程组的问题,数学上称为偏微分方程的边值问题。
按照不同的边界条件,弹性力学有三类边值问题。
第一类边值问题:已知弹性体内的体力F b x,F b y,F b z和其表面的面力F s x,F s y,F s z,求平衡状态的弹性体内各点的应力分量和位移分量,这时的边界条件为面力边界条件。
第二类边值问题:已知弹性体内的体力分量F b x,F b y,F b z以及表面的位移分量,求平衡状态的弹性体内各点的应力分量和位移分量,这时的边界条件为位移边界条件。
第三类边值问题:已知弹性体内的体力分量F b x,F b y,F b z,以及物体表面的部分位移分量和部分面力分量,求平衡状态的弹性体内各点的应力分量和位移分量。
这时的边界条件在面力已知的部分,用面力边界条件,位移已知的部分用位移边界条件,称为混合边值问题。
以上三类边值问题,代表了一些简化的实际工程问题。
若不考虑物体的刚体位移,则三类边值问题的解是唯一的。
§5.2 位移解法-位移表示的平衡微分方程学习思路:以位移函数作为基本未知量求解弹性力学问题的方法称为位移法。
位移解法的基本方程是位移表示的平衡微分方程。
位移分量求解后,则可以通过几何方程和物理方程求出相应的应变分量和应力分量。
如果问题的边界条件为位移边界条件,边界条件描述比较简单。
如果问题为面力边界条件,由于边界条件是通过位移函数的导数描述的,因此应用困难。
总之若以位移为基本未知函数求解时,归结为在给定的边界条件下求解位移表示的平衡微分方程,即拉梅方程。
学习要点:1、位移表示的应力分量;2、位移表示的平衡微分方程;3、位移边界条件1、位移表示的应力分量位移解法是以位移函数作为基本未知函数求解的,所以需要通过几何方程将位移函数表达为应变分量,再通过物理方程将其表达为应力分量,代入平衡微分方程即可得到位移解法的基本方程。
首先,根据物理方程和几何方程,可以得到由位移分量表达的应力分量,即其中2、位移表示的平衡微分方程将上述位移表示的应力分量代入平衡微分方程,整理后可得这里是拉普拉斯运算符号,即。
上述方程是以位移表示的平衡微分方程,称为拉梅(Lamé)方程,它可以表示为张量形式或表达为矢量形式上式中为拉普拉斯算符矢量。
3、位移边界条件对于边界条件,如果物体表面的位移已知,则直接由位移形式给定,即使用位移边界条件如果给定的边界条件是物体表面的面力,则面力边界条件式需用位移分量表示,将应力分量代入物理方程,整理可得位移分量表示的面力边界条件或表达为张量形式显然,如果给定的边界条件是面力边界条件,那么位移解法的边界条件表达式十分复杂,因此求解的难度将是比较大的。
总之,如果以位移函数作为基本未知函数求解弹性力学问题,归结为在给定的边界条件下求解位移表示的平衡微分方程,即拉梅方程。
位移分量求解后,则可通过几何方程和物理方程求出相应的应变分量和应力分量。
§5.3 应力解法-应力表示的应变协调方程学习思路:如果选用应力分量或者应力函数作为基本未知量求解弹性力学问题称为应力解法。
应力解法的基本方程不仅有平衡微分方程,而且有变形协调方程。
因为仅仅满足平衡微分方程的应力分量并不一定是真实应力,这组应力分量求出的应变分量代入几何方程,将可能得到一组矛盾方程,这就不可能求出单值连续的位移分量。
由于变形协调方程是应变表示的,在应力解法中,需要转化为基本未知量应力分量表示。
利用平衡微分方程的求导形式简化变形协调方程,可以得到应力分量表示的变形协调方程。
总之,在以应力函数作为基本未知量求解时,归结为在给定的边界条件下,求解平衡微分方程和应力表达的变形协调方程所组成的偏微分方程。
学习要点:1、应力解法的基本方程;2、变形协调方程的简化;3、应力分量表达的变形协调方程;4、体力为常量时的变形协调方程。
1、应力解法的基本方程以应力作为基本未知函数求解弹性力学问题时,应力分量必须满足平衡微分方程和面力边界条件。
但是仅此还不够,仅仅满足上述条件的应力分量并不是真正的应力。
因为这组应力分量求出的应变分量代入几何方程,将可能得到一组矛盾方程,不可能求出单值连续的位移分量。
要使这组方程不矛盾,则要求应力分量不仅满足平衡微分方程和面力边界条件,而且应力分量对应的应变分量必须满足变形协调方程。
这个问题也可以从物理上解释,应力分量满足平衡微分方程和面力边界条件,只能保证物体的平衡,但是不能保证物体的连续。
只有这组应力分量求出的应变分量满足变形协调方程时,才能保证变形后的物体是连续的。
当位移分量作为基本未知函数求解时,变形协调方程是自然满足的。
如果位移表示基本未知量,只有应力作为基本未知函数求解时,变形协调方程作为一组补充方程是必须的。
因此,对于应力解法,应力分量必须满足平衡微分方程和变形协调方程。
由于变形协调方程是由应变分量表达的,在应力解法中,需要将其转换为由应力分量表达。
将物理方程改写为其中将上式代入变形协调方程的第一,四两式,可得轮换x,y,z可得其余四个方程,由此可得应力表达的变形协调方程。
2、变形协调方程的简化为了使问题进一步简化,就是使上式有更简单的形式,利用平衡微分方程再次对变形协调方程作进一步的简化。
将平衡微分方程的第一和第二两式分别对x,y求偏导数后再相加,则将上式代入应力分量表示的变形协调方程第一式并且注意到,可得轮换x,y,z以后,可得另外两个类似的公式。
将轮换后得到的三个公式相加,可得将上式回代到简化方程可得轮换x,y,z以后,可得另外两个类似的公式。
3、应力分量表达的变形协调方程下面我们对应力分量表示的变形协调方程的第二式作简化首先对平衡微分方程的第二和第三两式分别对z,y求偏导数,然后相加可以得到将上式与变形协调方程的第二式相加后并整理,可得上式为简化后的方程,轮换x,y,z以后,可得另外两个类似的公式。
综上所述,我们一共得到以下六个关系式上述方程即为应力分量表达的变形协调方程,通常称为贝尔特拉米-米切尔方程。
4、体力为常量时的变形协调方程如果弹性体体力为常量,则应力分量表达的变形协调方程可以简化为上述方程为应力分量表达的变形协调方程,通常简称为应力协调方程。
但是应该注意:应力是不需要协调的,其实质仍为应变分量所满足的变形协调关系。