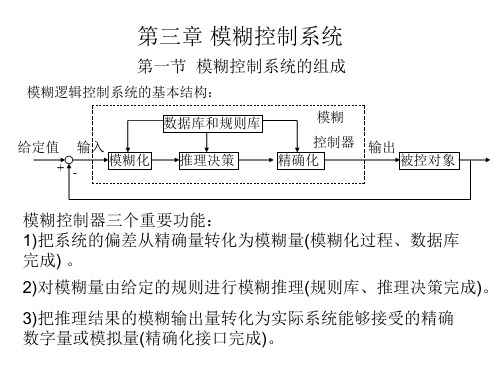
第3章 模糊控制
《智能控制》课程教学大纲(本科)
《智能控制》课程教学大纲注:课程类别是指公共基础课/学科基础课/专业课;课程性质是指必修/限选/任选。
一、课程地位与课程目标(-)课程地位《智能控制》是自动化专业的专业教育课程,代表着自动控制理论发展的新阶段,教学目的是培养学生掌握智能控制的基本概念,熟悉智能控制系统分析设计的一般方法及其应用。
本课程以智能控制中发展比较成熟的模糊控制、神经网络技术的理论与应用作为主要教学内容,介绍在工业领域中用传统方法难以解决的复杂系统的控制问题。
学生通过本课程的学习,可掌握智能控制系统的基本概念、工作原理、设计方法和实际应用,具备初步的运用智能控制理论和技术,对复杂控制工程问题进行分析、设计及解决实际问题的能力。
(二)课程目标(1)理解智能控制的基本概念,熟悉智能控制系统分析与设计的理论知识体系,具有面向自动化领域复杂控制工程问题的理解能力;培养大学生的科学精神,实事求是、开拓进取;(2)掌握模糊控制及人工神经网络的基本原理,具有运用智能控制理论,针对复杂控制工程问题进行计算和模拟的能力;培养大学生顽强拼搏、不畏挫折、勇于创新的精神。
(3)掌握智能控制系统设计的基本方法,具有运用智能控制理论和技术,针对复杂控制工程问题进行分析、设计和改进的能力。
二、课程目标达成的途径与方法《智能控制》课程教学以课堂教学为主,结合自主学习和上机教学,针对难以建模的控制对象,学习用模糊控制或人工神经网络控制的基本理论和方法,分析控制系统任务需求, 设计控制器的专业基础知识。
培养学生掌握智能控制的基本概念,熟悉智能控制系统分析设计的一般方法,具备初步的运用智能控制理论和技术,针对复杂控制工程问题进行分析、设计和改进的能力。
(1)课堂教学主要讲述智能控制的基本概念,基本原理、基本设计方法,在课堂教学中,充分引入互动环节,提高教学效果。
通过指导学生学习使用MATLAB仿真软件,进行简单的工程实例设计,使学生能够更加容易理解抽象的理论知识,提高学习兴趣,熟悉智能控制系统分析与设计的理论知识体系,形成良好的思维方式和学习方法。
智能控制理论及应用复习
智能控制理论及应用第1章绪论■《智能控制》在自动化课程体系中的位置《智能控制》是一门控制理论课程,研究如何运用人工智能的方法来构造控制系统和设计控制器。
与《自动控制原理》和《现代控制原理》一起构成了自动控制课程体系的理论基础。
■《智能控制》在控制理论中的位置《智能控制》是目前控制理论的最高级形式,代表了控制理论的发展趋势,能有效地处理复杂的控制问题。
其相关技术可以推广应用于控制之外的领域:金融、管理、土木、设计等等。
■经典控制和现代控制理论的统称为传统控制,智能控制是人工智能与控制理论交叉的产物,是传统控制理论发展的高级阶段。
智能控制是针对系统的复杂性、非线性和不确定性而提出来的。
■传统控制和智能控制的主要区别:➢传统控制方法在处理复杂化和不确定性问题方面能力很低;智能控制在处理复杂性、不确定性方面能力较高。
智能控制系统的核心任务是控制具有复杂性和不确定性的系统,而控制的最有效途径就是采用仿人智能控制决策。
➢传统控制是基于被控对象精确模型的控制方式;智能控制的核心是基于知识进行智能决策,采用灵活机动的决策方式迫使控制朝着期望的目标逼近。
传统控制和智能控制的统一:智能控制擅长解决非线性、时变等复杂的控制问题,而传统控制适于解决线性、时不变等相对简单的控制问题。
智能控制的许多解决方案是在传统控制方案基础上的改进,因此,智能控制是对传统控制的扩充和发展,传统控制是智能控制的一个组成部分。
■智能控制与传统控制的特点。
传统控制:经典反馈控制和现代理论控制。
它们的主要特征是基于精确的系统数学模型的控制。
适于解决线性、时不变等相对简单的控制问题。
智能控制:以上问题用智能的方法同样可以解决。
智能控制是对传统控制理论的发展,传统控制是智能控制的一个组成部分,在这个意义下,两者可以统一在智能控制的框架下。
■智能控制应用对象的特点(1)不确定性的模型模型未知或知之甚少;模型的结构和参数可能在很大范围内变化。
(2)高度的非线性(3)复杂的任务要求■自动控制的发展过程■智能控制系统的结构一般有哪几部分组成,它们之间存在什么关系?答:智能控制系统的基本结构一般由三个部分组成:人工智能(AI):是一个知识处理系统,具有记忆、学习、信息处理、形式语言、启发式推理等功能。
第3章 模糊理论
3 A(1.60)= =0.3 10
……
1 A(1.77)= =0.1 10 10 0.1 0.3 0.6 1 0.5 0.1 FA = + + + + + 1.56 1.60 1.64 1.69 1.73 1.77
A(1.64)=
6 =0.6 10
模糊统计法的特点: ①随着n的增大,隶属频率会趋向稳定,这个 稳定值就是v0对A的隶属度。 ②计算量大。 2、例证法 :从有限个隶属度值,来估计U上的模糊 集A 的隶属度函数。 3、专家经验法:根据专家的经验对每一现象产生 的各种结果的可能性程度,来决定其隶属度函数。 4、二元对比排序法:通过对多个事物之间的两两 对比,来确定某种特征下的顺序,由此来决定这些 事物对该特征的隶属函数的大体形状。
二、模糊控制的特点 1、无需知道被控对象的数学模型 2、是一种反映人类智慧思维的智能控制 模糊控制采用人类思维中的模糊量,如“高”、 “中”、“低”等,且控制量由模糊推理导出 3、易于被人们所接受(核心:控制规则) 4、构造容易 5、鲁棒性好
第二节 模糊集合论基础
一、模糊集的概念
集合:具有某种特定属性的对象全体。 集合中的个体通常用小写英文字母如:u表 示; 集合的全体又称为论域。通常用大写英文字 母如:U表示。 uU表示元素(个体)u在集合论域(全体) U内。
附近隶属函数的范围
重叠鲁棒性=
U
L
( A1 A2 )dx 2(U L)
重叠指数的定义
(0.3~0.7为宜)
求重叠率和重叠鲁棒性
例:
A1
A2
重叠率= 10 / 30 0.333
0 .5 10 重叠鲁棒性= 0.5 2(40 30) 20
智能控制基础-第3章 模糊建模和模糊辨识
13
智能控制 基础
3.2 模糊系统的通用近似特性
n
其中
p j ( x ) i1 Aij ( xi ) M
n
3-7
(
j 1
i 1
Aij ( xi
))
称为模糊基函数(Fuzzy Basis Function,FBF),而式(3-6) 称为模糊系统的模糊基函数展开式。模糊基函数具有下列特点:
(1) 每条规则对应一个基函数; (2) 基函数是输入向量x的函数。一旦输入变量的模糊集合个数 及隶属函数确定,模糊基函数也就确定了;
i
3-10
( ( x ) ( x )) j 11 j2 1 i1
A1ji1
i
A2j2i
i
Chapter 5 Perspectives on Fuzzy Control
17
智能控制 基础
3.2 模糊系统的通用近似特性
k1 k2
n
f1( x )
f2( x )
(
z zj1 j2 12
)(
既然每条规则都推导出了一个精确输出,Tsukamoto 模糊模型通过加权平均的方法把每条规则的输出集成起来 ,这样就避免了耗时的解模糊过程。
Chapter 5 Perspectives on Fuzzy Control
7
智能控制 基础
3.1
模糊模型的类型与分割形式
最小或相乘
A1
B1
C1
A2
w1
X
j1 1 j2 1
k1 k2
n
i 1
( x ) ( x )) A1ji1
i
A2ji2
i
3-11
( ( x ) ( x )) j 11 j2 1 i1
WORD型模糊控制电子教案
WORD型模糊控制电子教案第一章:模糊控制基础1.1 模糊控制简介模糊控制的起源和发展模糊控制与传统控制的比较模糊控制的应用领域1.2 模糊集合与模糊逻辑模糊集合的定义和表示模糊逻辑的基本原理模糊推理与模糊判断1.3 模糊控制系统的结构与原理模糊控制系统的组成模糊控制器的结构与设计模糊控制算法的实现第二章:WORD型模糊控制器的结构与设计2.1 WORD型模糊控制器的概述WORD型模糊控制器的定义和特点WORD型模糊控制器的应用领域WORD型模糊控制器的设计要求2.2 WORD型模糊控制器的结构设计输入输出层的结构设计模糊化层的结构设计规则库的设计解模糊层的结构设计2.3 WORD型模糊控制器的参数设计模糊集合的划分与选择隶属度函数的设计模糊规则的设计与优化第三章:WORD型模糊控制器的仿真与优化3.1 WORD型模糊控制器的仿真方法模糊控制仿真系统的构建模糊控制仿真的基本步骤仿真结果的分析和评估3.2 WORD型模糊控制器的优化方法基于规则的优化方法基于隶属度函数的优化方法基于控制效果的优化方法3.3 WORD型模糊控制器的性能改进改进控制器的动态性能提高控制器的鲁棒性降低控制器的计算复杂度第四章:WORD型模糊控制器在电子系统中的应用4.1 WORD型模糊控制器在温度控制系统中的应用温度控制系统的原理与结构WORD型模糊控制器的设计与实现仿真结果与实际应用效果分析4.2 WORD型模糊控制器在速度控制系统中的应用速度控制系统的原理与结构WORD型模糊控制器的设计与实现仿真结果与实际应用效果分析4.3 WORD型模糊控制器在其他电子系统中的应用例如:电机控制系统、控制系统等第五章:WORD型模糊控制器的实验与验证5.1 WORD型模糊控制器的硬件实验平台实验硬件的选择与搭建实验系统的调试与验证5.2 WORD型模糊控制器的软件实验平台实验软件的选择与使用实验数据的采集与分析5.3 WORD型模糊控制器的实验结果与验证实验结果的对比与评估实验结果的实际应用价值第六章:WORD型模糊控制器的设计实例6.1 电机控制系统中的WORD型模糊控制器设计电机控制系统的原理与结构WORD型模糊控制器的设计与实现电机控制系统仿真与实际应用效果分析6.2 控制系统中的WORD型模糊控制器设计控制系统的原理与结构WORD型模糊控制器的设计与实现控制系统仿真与实际应用效果分析6.3 其它实例及WORD型模糊控制器的设计与应用如:风力发电控制系统、无人驾驶控制系统等第七章:WORD型模糊控制器的性能分析与评估7.1 WORD型模糊控制器的静态性能分析稳态误差分析静态特性曲线分析7.2 WORD型模糊控制器的动态性能分析动态响应特性分析过渡过程性能分析7.3 WORD型模糊控制器的性能评估指标控制效果评估指标系统稳定性评估指标计算复杂度评估指标第八章:WORD型模糊控制器的优化方法8.1 基于遗传算法的WORD型模糊控制器优化遗传算法的基本原理与实现遗传算法在WORD型模糊控制器优化中的应用优化结果分析与评估8.2 基于粒子群优化算法的WORD型模糊控制器优化粒子群优化算法的基本原理与实现粒子群优化算法在WORD型模糊控制器优化中的应用优化结果分析与评估8.3 基于神经网络的WORD型模糊控制器优化神经网络的基本原理与实现神经网络在WORD型模糊控制器优化中的应用优化结果分析与评估第九章:WORD型模糊控制器的实际应用与案例分析9.1 WORD型模糊控制器在工业领域的应用案例如:工业生产线自动控制系统、化学工业过程控制系统等9.2 WORD型模糊控制器在农业领域的应用案例如:农业自动化控制系统、智能灌溉系统等9.3 WORD型模糊控制器在日常生活领域的应用案例如:智能家居控制系统、智能交通控制系统等第十章:WORD型模糊控制器的未来发展趋势与展望10.1 WORD型模糊控制器技术的发展趋势新型模糊控制算法的研究与发展WORD型模糊控制器与其他控制技术的融合跨学科研究与创新应用10.2 WORD型模糊控制器在未来的应用前景应用于更多领域的智能化控制系统与、大数据等技术的结合为人类社会带来的福祉与贡献重点和难点解析一、模糊控制基础:理解模糊集合与模糊逻辑的基本概念,以及模糊控制系统的原理和结构。
模糊控制毕业论文

模糊控制考核论文姓名:郑鑫学号:1409814011 班级:149641 题目:模糊控制的理论与发展概述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念及应用,详细介绍了模糊控制器的设计,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
关键词:模糊控制;模糊控制器;现状及展望Abstract Fuzzy control theory is based on fuzzy mathematics, using language rule representation and advanced computer technology, it is a high-level control strategy which can make decision by the fuzzy reasoning. Fuzzy control is a computer numerical contro which based fuzzy set theory, fuzzy linguistic variables and fuzzy logic, it has become the effective form of intelligent control especially in the form of fuzzy control and neural networks, genetic algorithms and chaos theory and other new integration of disciplines, which is showing its great potential. Fuzzy control is essentially a nonlinear control, and subordinates intelligent control areas. A major feature of fuzzy control is both a systematic theory and a large number of the application background.This article introduces simply the concept and application of fuzzy control and introduces detailly the design of the fuzzy controller. It contains the principles of fuzzy control system, the classification of fuzzy controller and its design elements.Key words: Fuzzy Control; Fuzzy Controller; Status and Prospects.引言传统的常规PID控制方式是根据被控制对象的数学模型建立,虽然它的控制精度可以很高,但对于多变量且具有强耦合性的时变系统表现出很大的误差。
14版《智能控制技术基础》课程教学大纲
0401061
课程类别
学科专业课
学分
2
总学时
32
开课学期
七
修读类别
选修课
开课单位
自动化学院自动化系
适用专业
自动化
先修课程
自动控制原理、控制系统仿真、现代控制理论、专业英语
主讲教师
梁雪慧董恩增
考核方式及各环节所占比例
考试课;
期末考试占70%,平时成绩占20%,实验占10%
课程概要
智能控制技术基础是工科高等学校自动化专业本科生的一门选修课。相对于传统控制理论及方法,该门课主要介绍一些先进的、有一定数学基础的控制方法及其应用,例如:模糊控制、神经网络控制、专家系统等。
4.习题课、课外作业、答疑和质疑
(1)习题课:安排在模糊控制的理论基础、模糊控制系统等章节中。
(2)课外习题:罗兵《智能控制技术》,2011年3月第1版,第一章1、3、6,第二章3、4、5、6、7、8,第三章1、4、6,第四章1、3,第五章1、2、4。
(3)答疑和质疑
每两周在规定时间和地点至少安排一次答疑或质疑。
5.考试环节
掌握:神经网络模型分类、前向神经网络及BP算法、动态网络特点与Hopfield网络
难点:前向网络及BP算法、神经网络控制。
第四章专家控制系统(4学时)
教学目的:
理解:专家系统的概念、专家控制的知识表示与推理、直接专家控制系统、间接专家控制系统等;
掌握:专家控制系统概念、专家控制系统结构与原理、专家控制的应用领域。
教学目的及要求
拓宽专业知识面,了解先进的控制理论及其应用领域,掌握基本的智能控制系统原理及其设计方法;学会应用MATLAB模糊工具箱实现模糊控制器的设计,通过仿真试验,分析控制器的应用效果,使学生具备基本的模糊控制系统的设计与分析能力。课程采用双语授课,使学生掌握专业知识的同时,提高外文文献的阅读和理解能力,并了解国际智能控制领域的最新动态。
基于Takagi-Sugeno模糊模型的模糊控制
天津大学硕士学位论文基于Takagi-Sugeno模糊模型的模糊控制姓名:徐妮妮申请学位级别:硕士专业:控制理论与控制工程指导教师:高志伟2002.1.1112陟乒TS模糊模型可以很好地逼近非线性系统,其予模型采用线性动态方程易于用现代控制理论的方法进行分析和控制器的设计。
本文的工作是围绕TS模糊模型展开的。
首先对以往的模糊系统的稳定性分析和模糊控制器的设计成果进行了回顾。
接下来,文中重点讨论了一般模糊系统的模糊控制器的设计和模糊状态观测器的设计。
得出用模糊状态观测一控制器实现的闭环模糊系统的稳定性定理。
文中提出了模糊状态观测器和模糊控制器的相对分离性设计。
仿真结果验证了结论的正确性。
文中通过扩展Ts模糊模型定义了模糊广义系统。
讨论了模糊广义系统的模糊状态观测一控制器的设计。
同样,模糊广义系统的模糊状态观测器和模糊控制器也具有设计的相对分离性。
关键词:Ts模糊模型,模糊控制器,模糊状态观测器,模糊广义系统AbstractThispaperconcentratesontheTSfuzzymodel.ThefuzzymodelproposedbyTakagiandSugenoisdescribedbyfuzzyIF-THENrule,whichrepresentlocallinearinput—outputrelationsofanonlinearsystem.Tobeginwitll.TSfuzzymodelandpreviousstabilityresultsarerecalled.ThenextsectionaddressestheanalysisanddesignofthefuzzycontrollerandthefuzzyobserveronthebasisoftheTSfuzzymodel.Thestabilityconditionfortheclosed-loopsystemisderived,whichshowsthatthefuzzycontrollerandthefuzzyobserverCanbedesignedindependentlywitllsomeconstrains.Thenumericalsimulationonallinvertedpendulumsystemisgiventoillustratetheperformanceoftheclosed-loopsystem.FinallyafuzzydescriptorsystembyextendingtheordinaryTSfuzzymodelisdefined.Thefuzzycontrollerandthefuzzyobserverofthefuzzydescriptorsystemarediscussed.Fourkindsofstabilityconditionsarederived.Simulationresultshowstheutilitiesofthosestabilityconditions.Keywords:TSfuzzymodel,fuzzycontroller,fuzzyobserver,fuzzydescriptorsystem第一章绪论第一章绪论§1.1模糊控制系统近年来的研究与发展美国加利福尼亚大学L.A.Zadeh教授在1965年提出的{FuzzySet>)【1】开创了模糊控制的历史,从此模糊数学科学发展起来了。
第三章、模糊控制系统
精确量(V0)
∴V0 = 5
当论域V中,其最大隶属度函数对应的输出值多于一个时, 简单取最大隶属度输出的平均即可:
即:当有(v1) µ 2)= L =µc (vJ ) 最大时 µ = (v
1 J 取v0 = ∑ v j J j =1
U 1 , U 2 , L ,U n :输出论域上模糊子集
总的模糊关系: R( 其中:
e , de , u ) = U Ri
n
当ki 取µv (vi )时
重心法
模糊化计算的其它方法:左取大、右取大等。
第二节:模糊控制系统的设计 一、模糊控制器的结构设计 模糊控制器的结构设计包括:输入输出变量选择、模糊化 算法、模糊推理规则和精确化计算方法。 一维模糊控制器 被控对象 输入输出 (按模糊控制器输入变量个数) 变量 多输入多输出 单输入单输出 二维模糊控制器 多维模糊控制器
例:x分成三档(NB、ZE、PB); y y分成两档(NB、PB); 模糊分区形式:
PB NB 0 NB ZE
R1
R2 R4
R3
PB 24
问:在此分档情况下,最大规则数为多少?
x
2 规则库 用一系列模糊条件描述的模糊控制规则就构成模糊控制规则库。 建立 规则库 选择输入变量和输出变量 建立规则(完备性、交叉性、一致性)
完备性:对于任意给定的输入均有相应的控制规则起作用。 交叉性:控制器的输出值总由数条规则来决定。 一致性:规则中不存在相互矛盾的规则。
模糊控制规则建立方法 1)专家经验法: 通过对专家控制经验的咨询形成控制规则库。 实质:通过语言条件语句来模拟人类的控制行为。
过程装备与控制课程设计
过程装备与控制课程设计一、课程目标知识目标:1. 让学生掌握过程装备的基本原理和结构组成,理解各类过程装备的工作机制。
2. 使学生了解控制系统的基本概念,掌握常见控制算法及其在过程装备中的应用。
3. 帮助学生掌握过程装备与控制系统的设计方法,培养其运用专业知识解决实际问题的能力。
技能目标:1. 培养学生运用CAD软件进行过程装备结构设计和控制系统原理图绘制的能力。
2. 提高学生运用仿真软件对过程装备与控制系统进行调试和优化的技能。
3. 培养学生团队合作能力和沟通表达能力,使其能在项目设计中有效协作。
情感态度价值观目标:1. 培养学生对过程装备与控制领域的学习兴趣,激发其探索精神和创新意识。
2. 增强学生的环保意识,使其在设计过程中充分考虑节能、环保等因素。
3. 培养学生严谨、负责的工作态度,使其遵循工程伦理,注重工程质量。
本课程针对高年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果,以便后续的教学设计和评估。
在教学过程中,注重理论与实践相结合,提高学生的实际操作能力和解决问题的能力,为未来从事相关工作打下坚实基础。
二、教学内容本章节教学内容主要包括以下三个方面:1. 过程装备基本原理与结构组成- 教材章节:第二章- 内容列举:流体机械、气压传动、温度控制装备等原理及结构组成;各类传感器、执行器的原理与应用。
2. 控制系统原理与应用- 教材章节:第三章- 内容列举:PID控制算法、模糊控制、神经网络控制等;控制系统原理图绘制与仿真。
3. 过程装备与控制系统设计方法- 教材章节:第四章- 内容列举:设计流程、设计原则、控制系统设计方法;典型过程装备与控制系统案例解析。
教学大纲安排如下:第一周:过程装备基本原理与结构组成学习。
第二周:控制系统原理与应用学习。
第三周:过程装备与控制系统设计方法学习。
第四周:案例分析与实践操作。
教学内容确保科学性和系统性,结合课程目标,注重理论与实践相结合,使学生能够系统掌握过程装备与控制相关知识,为后续课程设计和实践打下坚实基础。
智能控制技术-第三章

一个简单的求中间隶属度值的求取。
在模糊控制系统中,变量的量化给出了控 制器计算的简化和控制值的平滑之间的一 个折衷,为了消除大的误差,在量化级之 间的一些插值运算是必要的。
一个简单的方法是引入一个权系数w(.):对 于一个连续的测量值可以通过相邻两个离 散值的加权运算得到模糊度的值。
模糊控制器结构指的是输入输出变 量、模糊化算法、模糊推理规则和精确 化计算方法。
控制器的设计第一步首先确定控制器的输 入输出变量。
1、控制器输入输出变量
主要讲单输入-单输出模糊控制结构。
单输入-单输出模糊控制结构指的是系 统控制量只有一个,系统输出量只有一个。
单输入-单输出模糊控制结构又分一维模糊 控制器、二维模糊控制器和多维模糊控制 器。
m
vik i
v0
i1 m
ki
i1
ki视情况而定。如果,那么加权平均法就变为重 心法。
面积重心法对于不同的隶属度函数形状会
有不同的推理输出结果。最大隶属度函数 法对隶属度函数的形状要求不高。
第二节 模糊控制系统设计
一、模糊控制器的结构设计 在设计模糊控制器前,首先根据被
控对象的具体情况来确定模糊控制器的 结构。
设被控对象用以下三个控制规律描述:
规律1: 如果Yn=PM 且Un=PM 那么Yn+1=PB; 规律2: 如果Yn=PS 且Un=NS 那么Yn+1=ZE; 规律3: 如果Yn=NS 且Un=PS 那么Yn+1=ZE; 规律4: 如果Yn=NM 且Un=NM 那么Yn+1=NB; 其中Y是输出,U是控制,n是离散时间。
例如:两个输出变量A、B下的一个模糊空 间划分示意图。
飞行器控制中的自适应模糊控制技术研究
飞行器控制中的自适应模糊控制技术研究第一章绪论随着科技的不断发展,飞行器成为现代军事和民用航空的核心。
飞行器的控制系统是保证其正常飞行和精确飞行的关键所在,因此研究飞行器控制中的自适应模糊控制技术具有重要的现实意义和学术价值。
本文将从自适应模糊控制技术的原理和应用入手,重点探讨其在飞行器控制中的应用。
首先,介绍自适应模糊控制技术的概念、原理及其在控制系统中的常用方法。
接着,探讨飞行器控制系统中的模糊控制技术及其特点。
最后,对自适应模糊控制技术在飞行器控制中的应用进行详细分析和讨论。
第二章自适应模糊控制技术的基本原理和应用2.1 自适应模糊控制技术的概念和原理自适应模糊控制技术是将自适应控制和模糊控制相结合的一种控制方法,是在保证控制系统稳定性的基础上,不断地调整控制量以达到预期效果。
自适应模糊控制技术的核心是模糊推理机和自适应算法。
其中,模糊推理机是通过一组模糊规则将模糊输入转化为模糊输出的方法。
自适应算法则是通过系统学习和参数调整,不断优化模糊规则,提高模糊推理的准确度和响应速度,从而实现控制系统的自适应性。
2.2 自适应模糊控制技术的常用方法在实际应用中,自适应模糊控制技术有很多种算法方法,其中最常用的是基于模糊PID控制的自适应方法和基于模糊神经网络的自适应方法。
基于模糊PID控制的自适应方法是将模糊控制器和PID控制器相结合,使得控制系统具有自适应能力和精确控制性。
该方法主要应用于温度、压力等工业控制领域。
基于模糊神经网络的自适应方法则是将模糊控制器和神经网络相结合,使得控制系统具有更加灵活的自适应性和非线性控制性。
该方法主要应用于飞行器、机器人等需要高精度控制的领域。
第三章飞行器控制中的模糊控制技术3.1 飞行器控制系统中的模糊控制技术在飞行器控制系统中,模糊控制技术是一种非线性、自适应、鲁棒性强的控制方法,可以应对不同工况的飞行条件,提高飞行器控制系统稳定性和精度。
在飞行器控制中,模糊控制技术主要应用于滑模控制、跟踪控制、姿态控制等方面。
基于现代控制理论的电机控制技术
基于现代控制理论的电机控制技术第一章前言电机广泛应用于现代工业生产与日常生活中,而电机控制技术对于电机的高效、可靠运行至关重要。
传统的电机控制技术由于其局限性已经不能满足现代化高质量、高精度、高效率的要求。
现代控制理论在电机控制方面的应用,能够显著提高电机的运行性能,提高其效率,实现降低能耗、降低成本、提高产品品质等目标。
本文将从现代控制理论在电机控制技术中的应用进行讲述。
第二章传统电机控制技术的局限性传统的电机控制技术主要以控制电机的电压与电流为主,此方法有以下缺点:1. 传统的电机控制技术对于电机的特性如转速、转矩、功率等无法进行精准控制,控制范围较窄,因此无法满足电机的高效率、高精度、高品质的要求。
2. 传统的电机控制技术受到环境变化的干扰较大,多数情况下控制精度较低。
3. 在需要对电机的工作条件进行实时检测和控制时,传统的电机控制技术缺乏相应的硬件设备,难以达成实时检测的目的。
第三章现代控制理论在电机控制中的应用现代控制理论的出现大大提高了控制系统的精度和控制范围。
利用现代控制理论可以对电机进行精确控制,进而获得较好的运行效果与产品质量。
1. 模型预测控制模型预测控制是一种基于数学模型的控制方法,通过建立电机控制模型,将所要控制的电机运动状态预测到未来时刻,再根据模型预测进行控制。
此方法具有优秀的精度和控制范围,对电机的控制及特性调整具有综合性能及实时性。
2. 自适应控制自适应控制是一种基于反馈控制的技术,通过不断检测电机的状态并反馈给控制器,调整控制器的控制参数,从而实现动态在线控制。
此方法适用于电机变化较大的情况下,能够保证控制精度稳定性。
3. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,将模糊逻辑的控制思想应用于电机控制领域,具有较好的适应性和鲁棒性。
在电机控制中,模糊控制可以有效的解决环境变化时控制精度下降等问题。
第四章结论现代控制理论的应用在电机控制领域中,具有许多优点,对于提高电机的运行效率和产品品质都有显著的作用。
模糊控制基础知识
1965年美国自动控制理论专家L.A. Zadeh首次提出了模糊集合理论,
1974年英国E.H.Mamdani首先将模糊控制应用于锅炉和蒸汽机的自动控 制。目前,模糊控制(Fuzzy Control)作为90年代的高新技术,得到非常广泛 的应用,被公认为简单而有效的控制技术。
模糊控制是以模糊集合论模糊语言变量和模糊逻辑推理为基础的 微机数字控制。它是模拟人的思维,构造一种非线性控制,以满足 复杂的,不确定的过程控制的需要。
A
i 1 5
论域 X 是离散的,则A可表示为
A ( xi )
xi
0 0 0.6 0.8 1 1 2 3 4 5
(2) 模糊集合的运算 A B A ( x) B ( x) ① 等集: ② 子集: A B A ( x) B ( x) A A ( x) 0 ③ 空集: ④ 并集: C A B c ( x) A ( x) B ( x) max[ A ( x), B ( x)] ⑤ 交集: c ( x) A ( x) B ( x) min[ A ( x), B ( x)] C A B ⑥ 补集: B A B ( x) 1 A ( x)
用模糊关系矩阵表示:
RAB ( A B) ( A E)
一些常见的模糊规则的关系矩阵的表达式: •如果x为A,则y为B, 否则y为C, A X , B Y , C Y •如果x为A,y为B, 则z为C
R ( A B) ( A C) :
A X , B Y ,C Z
计算机控制技术
第 4章 计算机控制系统的控制算法
Ex5 设X为横轴,Y为纵轴,直积 X Y即整个平面。模糊关系“x远远大于y” 的隶属函数确定为
模糊规则库的自动构建算法
模糊规则库的自动构建算法第一章:引言模糊规则库是模糊控制系统的核心组成部分,它能够将模糊化输入与输出之间的关系用一组模糊规则进行建模。
构建一个优质的模糊规则库对于实现准确、高效的模糊控制系统至关重要。
然而,手动构建一个复杂的模糊规则库是一项耗时且繁琐的任务,因此研究如何自动构建模糊规则库成为了一个热门的研究方向。
本章将介绍模糊规则库的自动构建算法以及其在实际应用中的重要性。
第二章:模糊规则库的基本结构与表示在介绍自动构建算法之前,首先需要了解模糊规则库的基本结构与表示方法。
模糊规则库通常由一组模糊规则组成,每个模糊规则由一个模糊化输入向量与一个模糊化输出向量之间的映射关系构成。
模糊规则可以使用条件-结论的形式表示,其中条件部分是模糊化输入向量,结论部分是模糊化输出向量。
模糊规则库的目标是根据给定的输入向量,通过匹配模糊规则库中的规则来推断出相应的输出。
第三章:模糊规则库的自动构建方法在实际应用中,手动构建一个复杂的模糊规则库是非常耗时且容易出错的。
因此,研究如何自动构建模糊规则库成为了一个重要的任务。
目前,已经提出了多种自动构建模糊规则库的方法。
其中一种常用的方法是基于遗传算法的自动构建方法。
该方法通过模拟自然界中的进化过程,通过选择、交叉和变异等操作,逐步优化模糊规则库的性能。
另一种方法是基于聚类算法的自动构建方法。
该方法将输入-输出数据集合聚类成不同的类别,然后针对每个类别构建一组模糊规则。
此外,还有一些其他的自动构建方法,如基于强化学习、神经网络等。
无论采用哪种方法,自动构建模糊规则库的关键是找到一种有效的方式来评估模糊规则库的性能。
常用的评估指标包括模糊规则库的准确度、覆盖率、鲁棒性等。
准确度指模糊规则库对于给定输入向量的输出结果与实际输出结果之间的差异程度;覆盖率指模糊规则库能够覆盖到的输入空间的比例;鲁棒性指模糊规则库对于输入数据中的噪声和不确定性的稳定性。
第四章:模糊规则库自动构建算法的实际应用模糊规则库的自动构建算法已经在多个领域得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊值
规则库R
模糊值
模糊化
输入e
输出u
模糊推理
精确值
精确值
期望值 +
e A/D
-
温度 传感器
热水器
去模糊化 u D/A
电磁阀
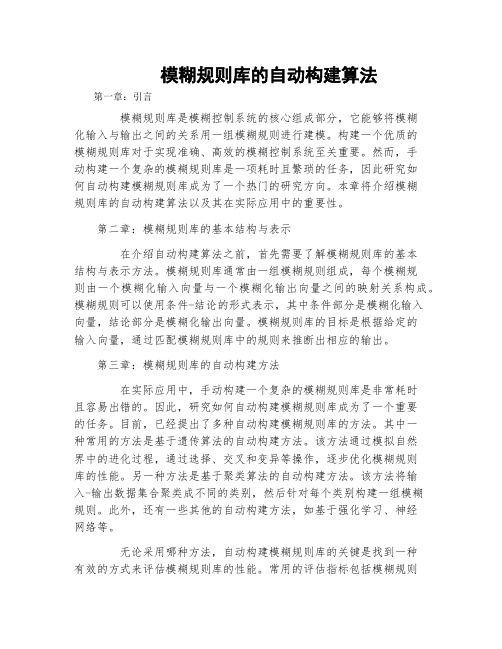
热水器水温模糊控制系统结构
College of Electrical and Information Engineering, Hunan Univ.
4
3.1 模糊控制的工作原理
9
3.2 模糊控制器的结构和设计
在确定了量化因子和比例因子之后,误差e和误差变化率ec可通过下式转换为模 糊控制器的输入E和EC:
E
ke
(e
eH
2
eL
)
EC
kec
(ecLeabharlann ecH2ecL
)
式中,<>代表取整运算。
模糊控制器的输出U可以通过下式转换为实际的输出值u:
u
ku
U
uH
2
uL
College of Electrical and Information Engineering, Hunan Univ.
人类的控制规则 如果水温比期望值高,就把燃气阀关小; 如果水温比期望值低,就把燃气阀开大。
描述了输入(水温与期望值的偏差 e)和输出(燃气阀开度的增量 u)之间的模糊关系R
College of Electrical and Information Engineering, Hunan Univ.
3
3.1 模糊控制的工作原理
College of Electrical and Information Engineering, Hunan Univ.
7
3.2 模糊控制器的结构和设计
2)语言变量论域的设计
在模糊控制器的设计中,通常就把语言变量的论域定义为有限整数的离散 论域。例如,可以将E的论域定义为{-m, -m+1, …, -1, 0, 1, …, m-1, m};将 EC的论域定义为{-n, -n+1, …, -1, 0, 1, …, n-1, n};将U的论域定义为{-l, l+1, …, -1, 0, 1, …, l-1, l}。
同理,假如误差变化率的连续取值范围是ec=[ecL,ecH] ,控制量的连续取值范 围是u=[uL,uH] ,则量化因子kec和比例因子ku可分别确定如下:
kec
2n ecH ecL
ku
uH uL 2l
College of Electrical and Information Engineering, Hunan Univ.
模糊控制器的基本工作原理
将测量得到的被控对象的状态经过模糊化接口转换为用人类自然语 言描述的模糊量,而后根据人类的语言控制规则,经过模糊推理得 到输出控制量的模糊取值,控制量的模糊取值再经过清晰化接口转 换为执行机构能够接收的精确量。
College of Electrical and Information Engineering, Hunan Univ.
5
3.2 模糊控制器的结构和设计
模糊控制器的基本结构通常由四个部分组成:
模糊化接口
规则库 模糊推理
规则库
清晰化接口
模
清
糊
晰
化
模糊推理
化
接
接
口
口
College of Electrical and Information Engineering, Hunan Univ.
6
3.2 模糊控制器的结构和设计
第三章 模糊控制
3.1 模糊控制的工作原理
模糊控制的基本思想
将人类专家对特定对象的控制经验,运用模糊集理论进行量化,转化为可 数学实现的控制器,从而实现对被控对象的控制。
人类专家的控制经验是如何转化为数字控制器的 ?
控制思想:
如果水温偏高,就把燃气阀关小; 如果水温偏低,就把燃气阀开大。
人类对热水器水温的调节
10
3.2 模糊控制器的结构和设计
3) 定义各语言变量的语言值
通常在语言变量的论域上,将其划分为有限的几档。 例如,可将E、EC和U的划分为 {“正大(PB)”,“正中(PM)”,“正小(PS)”,“零(ZO)”, “负小(NS)”,“负中(NM)”,“负大(NB)”}七档。
档级多,规则制定灵活,规则细致,但规则多、复杂,编制程序困难, 占用的内存较多; 档级少,规则少,规则实现方便,但过少的规则会使控制作用变粗而 达不到预期的效果。 因此在选择模糊状态时要兼顾简单性和控制效果。
8
3.2 模糊控制器的结构和设计
如何实现实际的连续域到有限整数离散域的转换?
通过引入量化因子ke、kec和比例因子ku来实现
期望值
+ -
e
E
ke
d/dt
ec
kec
EC
模糊 U 控制器
y
u
ku
假设在实际中,误差的连续取值范围是e=[eL,eH],eL表示低限值,eH表示高限
值。则:
ke
2m eH eL
3.2.1 模糊化接口
模糊化就是通过在控制器的输入、输出论域上定义语言变量,来将精确的输入、 输出值转换为模糊的语言值。
模糊化接口的设计步骤事实上就是定义语言变量的过程,可分为以下几步:
1) 语言变量的确定 针对模糊控制器每个输入、输出空间,各自定义一个语言变量。
通常取系统的误差值e和误差变化率ec为模糊控制器的两个输入,在 e的论域上定义语言变量“误差E”,在ec的论域上定义语言变量“误 差变化EC”;在控制量u的论域上定义语言变量“控制量U”。
?
为了提高实时性,模糊控制器常常以控制查询表的形式出现。该表反映 了通过模糊控制算法求出的模糊控制器输入量和输出量在给定离散点上 的对应关系。为了能方便地产生控制查询表,在模糊控制器的设计中, 通常就把语言变量的论域定义为有限整数的离散论域。
College of Electrical and Information Engineering, Hunan Univ.
College of Electrical and Information Engineering, Hunan Univ.
College of Electrical and Information Engineering, Hunan Univ.
2
3.1 模糊控制的工作原理
模仿人类的调节经验,可以构造一个模糊控制系统来实现对热水器的控制。 用一个温度传感器来替代左手进行对水温的测量,传感器的测量值经A/D变 换后送往控制器。 电磁燃气阀代替右手和机械燃气阀作为执行机构,电磁燃气阀的开度由控制 器的输出经D/A变换后控制。 构造控制器,使其能够模拟人类的操作经验。