基于改进核聚类算法的空间目标识别方法
基于直觉模糊核聚类的弹道中段目标识别方法

Te c h ni qu e f o r t a r g e t r e c o g ni t i o n i n ba l l i s t i c mi d c o u r s e b a s e d o n
・
i nt u i t i o ni s t i c f u z z y k e r n e l c l u s t e r i n g
摘 要 :针对现 有 的模 糊 核 聚 类算 法性 能 的 问题 , 汲取 直 觉模 糊 c 一 均值 聚 类 ( i n t u i t i o n i s t i c f u z z y c — me a n s ,
改进核密度估计的空间点密度算法

点密度是一定范围内点数量的统计值,是地理空间分析的重要任务[1-2],而核密度分析是点密度分析常用的重要方法,它是根据核密度估计函数(Kernel Density Estimator)将平面的二维离散点生成连续的三维表面,计算事件点在设定的周围邻近空间的密度的过程,直观地反映点群的聚集或离散分布特征[1]。
相比较于其他空间分析方法,核密度分析需要参数较少,受主观因素影响较小,因而成为了地理空间分析中应用最广泛的方法之一[2],被广泛应用至地物空间分布[3-4]、空间区域格局分析[5]、疫情监测与分析[6]、地质灾害与自然资源环境监测[7-8]、路径优化与分析[9]等诸多领域,从空间上获取事件的宏观分布特征。
研究者相继开发出适应R、Python、ArcGIS等多种编程语言和软件环境下的算法。
Kern-Smooth是R语言环境下用于计算核密度的功能包,按照核函数的不同可分为bkde、bkde2D、bkfe等函数,其中kde2d是R语言环境下应用最为广泛的密度函数[10-11],该改进核密度估计的空间点密度算法饶加旺1,2,马荣华21.江苏省测绘工程院空间信息技术研究中心,南京2100132.中国科学院南京地理与湖泊研究所,南京210008摘要:针对常用的核密度估计在计算离散点密度上存在的诸多局限,提出了空间点密度算法。
该算法在保持点离散属性与初始空间位置的基础上,设定分箱规则,获取离散点最近的格网点坐标;通过遍历,统计并计算每个搜索邻域内点的数量,以离散点初始坐标与点密度值为输出结果。
以USGS的美国大陆地下水资源数据集展开实验研究,采用可视化输出与时间复杂度为验证指标,与核密度估计算法进行对比验证。
实验结果表明,该算法提高了点密度的识别性,获取了离散点真实的密度值,可视化效果与精度方面均优于ArcGIS10.4.1与kde2d核密度分析的结果、运算效率优于kde2d算法。
关键词:地理空间;点密度;离散点;哈希表;数据挖掘文献标志码:A中图分类号:TP301.6;TP302.7doi:10.3778/j.issn.1002-8331.2003-0172Improved Kernel Density Estimator Based Spatial Point Density AlgorithmRAO Jiawang1,2,MA Ronghua21.Spatial Information Technology Research Center,Jiangsu Province Surveying&Mapping Engineering Institute,Nanjing 210013,China2.Nanjing Institute of Geography and Limnology,Chinese Academy of Sciences,Nanjing210008,ChinaAbstract:Due to the negative effects of commonly used kernel density estimator has many limitations on computing discrete point density,a point density algorithm based on projection and Hash-based data structure is purposed,which can quickly compute the true density of discrete points,by keeping the original location and discreteness of points.Coordinate of points in the nearest neighborhood grid are obtained by the rule of binning,then it calculates the number of points in each search neighborhood,density value and initial coordinate with discrete points for the output results.Groundwater resources of the continental United States extracted by USGS are used as experiment dataset,visualization output and the time complexity are used for validation indexes when compared with algorithm based on the kernel density.Results show that the algorithm improves the identification of density,obtains the true density value of discrete points,visual effect and the precision analysis are better than that of ArcGIS10.4.1kernel density and kde2d kernel density algorithm,the compu-tation efficiency is better than common kde2d algorithm.Key words:geographic spatial;point density;discrete points;Hash table;data mining基金项目:国家自然科学基金(41771366)。
融合KNN优化的密度峰值和FCM聚类算法

聚类(clustering )就是将一个数据集分成多个簇(cluster )或类,使得在同一类簇中的数据样本点之间具有相对高的相似度,而不同类簇中的数据样本点差别较大。
根据聚类的结果可以从数据中发现规律和知识,探索出藏在数据之后的规律和模式。
聚类算法被普遍地运用在数据科学分析和实际工程领域中[1-4],经过许多国内外研究人员的努力,产生了许多优秀的聚类算法,根据研究方向和算法实现原理的不同,目前聚类算法可划分为基于密度的方法、基于网格的方法、基于层次的方法、基于模型的方法和基于划分式方法等五种主流方法[5]。
模糊C 均值(Fuzzy C-Means ,FCM )算法[6]是基于划分式的聚类算法,此算法的基本思想是引入隶属度概念来量化样本点从属于每个类簇的数值大小,由此进行划分判断,使得划分到同一类簇的样本间相似度最大、不同类簇的样本间相似度最小,已达到对数据集划分为各类簇的目的,在模式识别、数据挖掘、数据分析、矢量量化以及图像分割等领域应用比较广泛[7-8]。
FCM 算法是C-Means 算法的衍生改进算法,C-Means 算法对数据集划分属于硬性、具体的划分,但FCM 算法对数据集的⦾理论与研发⦾基金项目:国家自然科学基金(61762046);江西省教育厅科技重点项目(GJJ160599);江西省自然科学基金(20161BAB212048)。
作者简介:兰红(1969—),女,博士,教授,硕士生导师,CCF 会员,研究领域为图像处理、模式识别,E-mail :;黄敏(1996—),男,硕士研究生,研究领域为图像处理、深度学习。
收稿日期:2020-05-05修回日期:2020-08-24文章编号:1002-8331(2021)09-0081-08融合KNN 优化的密度峰值和FCM 聚类算法兰红,黄敏江西理工大学信息工程学院,江西赣州341000摘要:针对模糊C 均值(Fuzzy C-Means ,FCM )聚类算法对初始聚类中心和噪声敏感、对边界样本聚类不够准确且易收敛于局部极小值等问题,提出了一种K 邻近(KNN )优化的密度峰值(DPC )算法和FCM 相结合的融合聚类算法(KDPC-FCM )。
空间目标探测与识别方法研究
空间目标探测与识别方法研究一、概述空间目标探测与识别作为航天领域的重要研究方向,旨在实现对地球轨道上各类空间目标的精确探测和有效识别。
随着航天技术的不断发展,空间目标数量日益增多,类型也日趋复杂,这给空间目标探测与识别带来了前所未有的挑战。
深入研究空间目标探测与识别方法,对于提升我国航天事业的国际竞争力、维护国家空间安全具有重要意义。
空间目标探测主要依赖于各类传感器和探测设备,如雷达、光电望远镜、红外传感器等。
这些设备能够捕获空间目标的信号或特征信息,为后续的目标识别提供数据支持。
由于空间环境的复杂性和目标特性的多样性,探测过程中往往伴随着大量的噪声和干扰,这要求我们必须采用先进的信号处理技术来提取有用的目标信息。
空间目标识别则是基于探测到的目标信息,利用模式识别、机器学习等方法对目标进行分类和识别。
识别的准确性直接影响到后续的空间态势感知、目标跟踪以及空间任务规划等工作的质量。
如何提高识别算法的准确性和鲁棒性,是当前空间目标识别领域的研究重点。
本文将对空间目标探测与识别方法进行深入研究,包括探测设备的选择与优化、信号处理技术的研究与应用、以及识别算法的设计与实现等方面。
通过对这些关键技术的探讨,旨在为提升我国空间目标探测与识别的能力提供理论支持和技术保障。
1. 空间目标探测与识别的背景与意义随着科技的飞速发展和人类对宇宙探索的深入,空间目标探测与识别技术逐渐成为当今科研领域的热点。
空间目标包括各类卫星、太空碎片、深空探测器以及潜在的太空威胁等,它们的存在与活动对人类的航天活动、地球安全以及宇宙资源的开发利用具有重要影响。
在空间目标探测与识别领域,通过高精度、高可靠性的技术手段对空间目标进行实时、准确的监测与识别,对于保障航天器的安全运行、预防太空碰撞、维护国家安全和促进航天事业的发展具有重要意义。
对于深空探测和宇宙资源的开发利用,空间目标探测与识别技术也提供了有力的技术支撑。
随着太空竞争的加剧,空间目标探测与识别技术也成为各国军事竞争的重要领域。
(完整版)X-means:一种针对聚类个数的K-means算法改进

X-means:一种针对聚类个数的K-means算法改进摘要尽管K-means很受欢迎,但是他有不可避免的三个缺点:1、它的计算规模是受限的。
2、它的聚类个数K必须是由用户手动指定的。
3、它的搜索是基于局部极小值的。
在本文中,我们引入了前两种问题的解决办法,而针对最后一个问题,我们提出了一种局部补救的措施。
根据先前有关算法改进的工作,我们引入了一种根据BIC(Bayesian Information Criterion)或者AIC(Akaike information criterion)得分机制而确定聚类个数的算法,本文的创新点包括:两种新的利用充分统计量的方式,还有一种有效地测试方法,这种方法在K-means算法中可以用来筛选最优的子集。
通过这样的方式可以得到一种快速的、基于统计学的算法,这种算法可以实现输出聚类个数以及他们的参量值。
实验表明,这种技术可以更科学的找出聚类个数K值,比利用不同的K值而重复使用K-means算法更快速。
1、介绍K-means算法在处理量化数据中已经用了很长时间了,它的吸引力主要在于它很简单,并且算法是局部最小化收敛的。
但是它有三点不可避免的缺点:首先,它在完成每次迭代的过程中要耗费大量的时间,并且它所能处理的数据量也是很少的。
第二,聚类个数K值必须由用户自身来定义。
第三,当限定了一个确定的K值时,K-means算法往往比一个动态K值的算法表现的更差。
我们要提供针对这些问题的解决办法,通过嵌入树型的数据集以及将节点存储为充分统计变量的方式来大幅度提高算法的计算速度。
确定中心的分析算法要考虑到泰森多边形边界的几何中心,并且在估计过程的任何地方都不能存在近似的方法。
另外还有一种估计方法,“黑名单”,这个列表中将会包含那些需要在指定的区域内被考虑的图心。
这种方法不仅在准确度上以及处理数据的规模上都表现的非常好,而这个快速算法在X-means 聚类算法当中充当了结构算法的作用,通过它可以很快的估计K值。
基于改进yolov5的船舶目标识别

基于改进yolov5的船舶目标识别摘要:随着船运流量的增加,也出现了相应的管理问题,例如对海上非法捕鱼、海盗行为、贩毒、非法货物运输的严厉打击,以及针对海上事故的救援。
因此海域管理必须依靠船只巡航以及设备的监控、检测,形成一套实时监测系统,对我国的海洋管理具有重要的理论意义和应用价值。
针对海上环境复杂多变、船舶目标检测精度不足和效率低下的问题,提出基于改进yolov5的船舶目标检测算法,在主干网络添加坐标注意力机制,以提升算法的特征提取能力;使用DIOU_Loss代替原有的损失函数,增加检测准确度和定位精度;应用GhostConv 卷积,减小模型量的同时而保持精度基本不变。
实验结果表明,相比与改进前的yolov5,改进算法的平均精度均值(mAP)、精准率(P)和召回率(R)分别提升了2.0%、1.7%、1.5%,验证了改进算法对船舶识别有很好的效果。
关键词:Yolov5网络;模型训练;目标检测;船舶识别Ship target recognition based on improved yolov5Abstract: With the increase in shipping flows comes a corresponding management problem, such as a crackdown on illegal fishing at sea, piracy, drug trafficking, illegal cargo transport, and the rescue of maritime accidents. Therefore, sea area management must rely on ship cruise and equipment monitoring and detection, forming a set of real-time monitoring system, which has important theoretical significance and application value for our ocean management. Aiming at the problems of complex and changing Marine environment, insufficient accuracy and low efficiency of ship target detection, a ship target detection algorithm based on improved yolov5 is proposed, and coordinate attention mechanism is added to the backbone network to improve the feature extraction ability of the algorithm. DIOU_Loss is used to replace the original loss function to increase the detectionaccuracy and positioning accuracy. Using GhostConv convolution, the model size is reduced while the accuracy is kept basically unchanged. The experimental results show that compared with the yolov5 before improvement, the mean precision (mAP), accuracy (P) and recall rate (R) of the improved algorithm are increased by 2.0%, 1.7% and 1.5% respectively, which verifies that the improved algorithm has a good effect on ship identification.Key words: Yolov5 network; Model training; Object detection; Ship identification当前,船舶目标检测研究可大致分为两类,一类基于传统的图像处理技术,主要是利用滑动窗口[1]的思想,获取候选区域的HOG特征[2]和SIFT特征[3]利用支持向量机[4](support Vector machine,SVM),通过图像分割、特征提取和分类识别的过程达到检测的目的。
核密度估计及其在聚类算法构造中的应用

中图法分类号 TP391
Kernel Density Estimation and Its Application to Clustering Algorithm Construc2 tion
L I Cun2Hua1 ,2 , SUN Zhi2Hui1 , Chen Geng1 , and Hu Yun1 ,2
DBSCAN算法
DBSCAN算法DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法,可以用于发现任意形状的聚类簇,对噪声数据也有较好的容忍度。
DBSCAN算法通过计算数据点的密度来确定聚类簇,并使用可达性和核心点的概念进行聚类。
该算法具有较低的计算复杂度和较好的扩展性,被广泛应用于数据挖掘、图像分析、空间数据分析等领域。
DBSCAN算法的基本思想是:对于给定数据集,首先选择一个随机数据点作为种子点,判断该点的ε-邻域内是否包含足够数量的数据点,若是,则将种子点标记为核心点,根据根据核心点的ε-邻域内的数据点是否包含足够数量的数据点,将这些数据点归为同一个聚类簇。
然后,对于核心点的ε-邻域内的非核心点进行迭代,将其归为对应的聚类簇,直到所有点都被访问并被归类。
DBSCAN算法的关键参数包括半径参数ε和最小密度参数MinPts。
其中,半径参数ε用来决定邻域的大小,最小密度参数MinPts用来决定核心点的最小邻域内数据点数量。
对于任意数据点p,若其ε-邻域内的数据点数量少于MinPts,则将该点标记为噪声点或边界点;若其ε-邻域内的数据点数量大于等于MinPts,则将该点标记为核心点。
DBSCAN算法的优势在于可以发现任意形状的聚类簇,对噪声数据较为容忍,且不需要事先指定聚类的数量。
相比于传统的聚类算法(如K-means算法),DBSCAN算法可以有效处理由于聚类簇形状不规则或聚类簇之间存在不同密度区域造成的效果差异;相比于基于密度的聚类算法(如OPTICS算法),DBSCAN算法具有较低的计算复杂度。
具体实现DBSCAN算法时,可以使用以下步骤:1.随机选择一个未访问的数据点p;2. 判断p的ε-邻域内是否包含至少MinPts个数据点,若是,则将p标记为核心点;否则标记为噪声点或边界点;3.若p被标记为核心点,则创建一个新的聚类簇,并将p加入该聚类簇;4.对p的ε-邻域内的所有未访问数据点进行迭代,若其中一邻域数据点q未被访问,则访问该点;5.对于访问过的数据点q,若其也被标记为核心点,则将其ε-邻域内的所有未访问数据点加入聚类簇,并进行迭代;6.继续选择下一个未访问的数据点,重复上述步骤,直到所有数据点都被访问并被归类。
基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别
基于改进的Yolov8商业渔船电子监控数据中鱼类的检测与识别一、本文概述随着全球渔业资源的日益紧张,商业渔船的监管和资源保护变得尤为重要。
电子监控作为一种高效、实时的监管手段,正逐渐成为渔业管理的关键技术。
传统的电子监控数据分析主要依赖于人工审核,效率低下且易受主观因素影响。
开发一种自动化的鱼类检测与识别系统对于提高监管效率和保护渔业资源具有重要意义。
本文提出了一种基于改进的Yolov8算法的商业渔船电子监控数据中鱼类的检测与识别方法。
我们对Yolov8算法进行了改进,以适应复杂多变的海洋环境和渔船监控视频的特点。
改进包括网络结构的优化、损失函数的调整以及数据增强策略的应用。
我们构建了一个大规模的商业渔船监控视频数据集,用于模型的训练和测试。
数据集涵盖了多种海洋环境和鱼类种类,提高了模型的泛化能力。
实验结果表明,我们的方法在商业渔船电子监控数据中鱼类的检测与识别方面表现出色,显著提高了识别的准确率和效率。
本文的方法还具有较强的鲁棒性,能够适应不同的海洋环境和鱼类种类。
本研究的成功为商业渔船的电子监控数据分析提供了新的思路,有望为渔业资源的保护和管理提供有力支持。
二、商业渔船电子监控数据的概述随着现代渔业管理对可持续性和资源保护要求的不断提升,商业渔船已广泛采用先进的电子监控系统(Electronic Monitoring, EM)来替代或补充传统的船上观察员制度。
这些系统集成了多种传感器设备和视频记录技术,实时捕获并传输渔船作业过程中的丰富数据,为精确评估捕捞活动、保障海洋生物多样性及合规性监控提供了有力支持。
本节旨在对商业渔船电子监控数据进行概述,揭示其核心组成部分、采集方式以及在鱼类检测与识别中的关键作用。
船载摄像头:安置于渔船的关键作业区域,如甲板、渔获处理区、放网与收网处等,全天候记录高清晰度视频,直观展现捕捞操作、渔获种类与数量、尺寸分布等关键信息。
GPS定位系统:持续追踪渔船地理位置,确保捕捞活动发生在合法渔区,并记录渔船航行轨迹,用于分析捕捞行为的空间分布与时间模式。
聚类分析的算法优化与改进
聚类分析的算法优化与改进近年来,随着大数据技术的发展和普及,聚类分析被广泛应用于各个领域,如金融、医疗、物流等。
聚类分析是将一组相似的数据样本归为一类,不同类别的数据样本之间的相似度较低,同一类别的数据样本之间的相似度较高。
聚类分析的目的是在大量数据样本中寻找数据样本之间的关联性,发现隐藏在样本背后的规律性和特征。
然而,在聚类分析的实际应用中存在一些问题。
例如,聚类结果不稳定、计算效率低下等。
这些问题的出现,往往是由于聚类算法本身的缺陷造成的。
因此,优化和改进聚类算法是非常必要的。
首先,聚类算法的优化可以从数据预处理方面入手。
通常,聚类算法应该在数据预处理后进行。
例如,对于缺失数据的处理,可以采用插值、删除或替换等方法。
对于异常值的处理,可以采用离群点处理方法。
对于数据归一化,可以采用标准化或缩放等方法。
其次,聚类算法的优化也可以从相似度度量方面入手。
通常,相似度度量指的是聚类算法采用的距离度量方法。
常见的距离度量方法有欧氏距离、曼哈顿距离、闵可夫斯基距离等。
每种距离度量方法有其特点和适用的场景。
选择合适的距离度量方法对聚类算法的效果至关重要。
最后,聚类算法的改进可以从聚类结果的评估方面入手。
通常,评估聚类结果需要采用有效性指标,例如轮廓系数、DB指数、Dunn指数等。
这些指标可以用来评估聚类结果的准确度和稳定性。
通过评估聚类结果,可以不断改进聚类算法,提高算法的准确性和稳定性。
综上所述,聚类算法的优化和改进可以从多个方面入手,例如数据预处理、相似度度量和聚类结果评估。
在实际应用过程中,我们应该根据具体的场景和需求选择合适的优化和改进方法,以达到最好的聚类效果。
基于改进Hough变换的检测前跟踪方法
收稿 日期 :2 1-0 - 9 0 0 3 2
作者 简介:赵 成成 ( 9 6 ),重庆梁平人 ,讲 师,主要从事 自动化技术 ,通信测控技 术等方面的研究 。 16 -
第3 卷 2 第6 期 2 1 — [4 ] 0 6 0 2 3
、 l
二维 huh og变换参数 空间
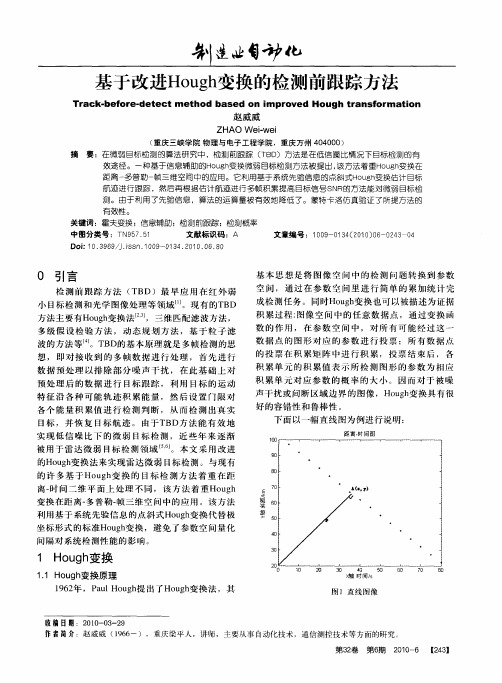
假 设 上 图 绿 色 单 元 表示 目标 ,灰 色 单 元 表 示
噪 声 。它们 的 幅度 都 是 1 白色 单 元 的 幅 度为 0 。 。
2 图 1 参 数 空 间的 映 射 在
Hale Waihona Puke 图 中两 条平 行性 之 问的 距 离 即极 距 量 化 间隔 。其
设 某 幅 图像 的 内容 为一 条线 段 ,如 图 1 示 。 所
距 离 . 阊 图 时
的H uh o g 变换 法 来实 现 雷达 微 弱 目标检 测 。与 现 有 的 许 多基 于 Ho g 变 换 的 目标 检 测 方 法 着 重 在 距 uh 离 一 问二 维 平 面上 处 理 不 同 ,该 方 法 着 重Ho g 时 uh
变换 在 距离 一 多普 勒一 三维 空 间 中 的应 用 。该方 法 帧
积 累单 元 的 积 累 值 表 示 所 检 测 图 形 的 参 数 为 相 应 积 累单 元 对 应 参数 的 概 率 的 大 小 。因 而 对 于被 噪
声 干 扰或 间断 区 域边 界 的图 像 ,Ho g 变 换具 有很 uh
好 的容 错性 和鲁 棒性 。
下 面 以一幅 直 线 图为例 进行 说 明 :
( 重庆 三峡学院 物理 与电子 工程学院 ,重庆万州 4 4 0 ) 0 0 0
摘
聚类算法的改进——DBSCAN

聚类算法的改进——DBSCANDBSCAN(Density-Based Spatial Clustering of Applicationswith Noise)是一种聚类算法,它基于数据点的密度进行聚类。
相对于传统的聚类算法,如K-means和层次聚类,DBSCAN具有以下几个优点:1.不需要预先指定簇的数量:传统的聚类算法需要提前指定聚类的数量,但在实际应用中,很难事先知道数据集的真正聚类数量。
DBSCAN通过定义邻域半径和最小密度来寻找密度高的区域,并以此为基础进行聚类,不需要预先指定簇的数量。
2.能够识别任意形状的聚类:传统的聚类算法通常只能识别凸形状的聚类,而对于非凸形状的聚类效果不佳。
DBSCAN通过定义邻域的概念,能够识别任意形状的聚类,包括凹凸形状的聚类。
3.能够处理噪声和异常值:在实际应用中,数据集中常常存在噪声和异常值,这些数据点不属于任何一个真正的聚类。
传统的聚类算法对于噪声和异常值的处理效果较差,容易将其错误地归类到其中一聚类中。
DBSCAN通过定义邻域密度,能够将噪声和异常值识别为孤立点,不将其归类到任何一个聚类中。
4.不受初始化的影响:传统的聚类算法对于初始的聚类中心的选择非常敏感,不同的初始值会得到不同的聚类结果。
而DBSCAN不需要初始化过程,仅根据数据点的密度和邻域信息进行聚类,不受初始化的影响。
然而,DBSCAN也存在一些不足之处,需要进行改进:1.对参数的敏感性:DBSCAN算法有两个重要的参数,即邻域半径和最小密度。
不同的参数设置会得到不同的聚类结果,但如何确定合适的参数值是一个难题。
目前常用的方法是通过经验或使用网格等调参方法来寻找最优的参数值。
如果没有选择合适的参数值,DBSCAN算法的聚类效果可能会较差。
2.对高维数据的低效性:DBSCAN算法在处理高维数据时,由于维数灾难的影响,计算邻域信息变得困难。
在高维数据中,样本点间的距离差异较小,容易导致样本点间的连接性变得模糊,导致聚类结果不准确。
houghp_line算法-概述说明以及解释

houghp_line算法-概述说明以及解释1.引言1.1 概述HoughP算法是一种基于Hough变换的图像处理算法,用于检测图像中的直线。
它是Hough变换的一种改进和优化,旨在解决Hough变换中存在的一些缺点和限制。
在图像处理领域,直线检测是一项重要的任务。
直线是图像中常见的基本形状之一,广泛应用于计算机视觉、模式识别、图像分析等领域。
传统的直线检测方法往往受到图像噪声、部分遮挡以及直线形状变化等因素的影响,导致检测结果不准确或者漏检。
HoughP算法通过对图像进行参数空间变换,将直线检测问题转化为参数空间中的点聚类问题,从而提高了直线检测的鲁棒性和准确性。
与传统的Hough变换相比,HoughP算法采用了分段投票的策略,可以有效地削弱或剔除噪声对直线检测的干扰,同时提高了算法的效率。
HoughP算法的基本原理是通过遍历图像中每个像素点,将每个像素点都转换到参数空间中的一条曲线上。
当这些曲线在参数空间中相交时,表示在图像中存在一条直线。
通过统计相交点的数量以及其位置信息,即可确定图像中的直线的位置和方向。
HoughP算法的应用范围广泛,例如在道路识别、文档处理、图像分割等领域都有重要的应用。
在道路识别中,HoughP算法可以用于检测道路的边界线,从而实现车道线检测和车道保持。
在文档处理中,HoughP 算法可以用于检测文本行的直线,从而实现文本区域的分割和识别。
在图像分割中,HoughP算法可以用于检测图像的边缘线,从而实现图像的分割和提取。
综上所述,HoughP算法是一种强大的直线检测算法,通过对图像进行参数空间变换,可以有效地提高直线检测的准确性和鲁棒性。
在实际的图像处理应用中,HoughP算法具有广泛的应用前景,为相关领域的研究和应用提供了有力的支持。
1.2文章结构1.2 文章结构本篇文章将围绕HoughP线段检测算法展开讨论。
文章主要包括以下几个部分:1. 引言:在引言部分,将对HoughP线段检测算法的背景和相关研究进行简要介绍,以及本文的目的和意义。
基于改进属性约简的粗核聚类算法

摘
要 : 聚 类 算 法 是 一 种 能 够 处 理 样 本 问 差 异 微 弱 的 有 效 聚 类 算 法 。 以粗 糙 集理 论 为 基 础 , 基 于 属 性 重 核 将
要 度 的属 性 约 简 算 法 应 用 到 核 聚 类 算法 中 , 出 一 种 新 的 聚 类 改 进 算 法 , 此 可 以得 到 高 准 确 率 低 复 杂 度 的 提 由 良好 结 果 。该 算 法 在 使 用 核 函 数 对 样 本 优 化 前 , 先 用 基 于 属 性 重 要 度 的 约 简 算 法 对 样 本 属 性 进 行 处 理 , 首 同
的 方 法 ( 均 值 、 中 心 点 ) 基 于 密 度 的 方 法 ( S AN、 TI S D NC UE) 基 于 网 格 的 方 法 K一 K一 , DB C OP C 、 E L ,
( TI S NG、 v lse 、 L QUE) 基 于模型 的方 法 ( 计 学方法 、 Wa eC u trC I , 统 神经 网络 方法 ) 基 于 约束 的方 法 等等 。 , 这 些 传统 聚类 算法 的可 靠性严 格 依赖 于各 类之 间的 特征 差别 。 但在 实 际情况 中 , 数据之 间的差别 往往 是模 糊的、 微弱 的 , 甚至 是交 错 的 , 这就 使得 聚类 过程 变得 非常 困难 。因此 , 焦李成 等 人提 出一 种能有 效解 决此 类 问题 的算 法 —— 核 聚类 算法 [6。 的主 要 思想是 利用 Mecr , 5] 它 _ re 核 将输 入 空间 的样本 映射 到高 维特 征空 间 , 保持 样本 原有 特性 的基 础上 , 出样 本 间差异 , 在 突 使得 原来 线性 不可 分 的样本 变得 线性 可分 , 然后 在放 大 的 特征 空间 中进行 聚 类 。 随着人 工智 能 和数 据库 的发 展 , 聚类 所 面 临的不 仅是 “ 数据 爆炸 ” 问题 , 重要 的还 有高 维数 据产 生 的 更 “ 度 灾难 ” 维 现象 [ 。 7 由于 传统 聚类 算法 主要 是针 对低 维连 续性 数据 的聚 类 , 以 高维数 据一 般不 能依 赖传 ] 所 统 聚 类算 法来 处理 , 且 样本 中 的冗 余属性 不仅 会增 加 聚类 的复 杂度 , 且还 会 影 响最 后 结果 的 准确性 。 并 而 为此 , 本文 引入属 性 约简算 法对 样 本进行 预 处理 后再进 行 聚类 。属性 约 简算 法 s 是粗 糙 集理论 中的 一个 核 心课题 , 的意义 在于保 持数 据库 分类 能 力不变 的前提 下 , 除冗 余属性 , 成精 简 的数据 集 , 它 删 形 从而 减少
基于空间与时间上下文的深度学习目标检测算法

时序信息利用
将目标在连续帧中的时序信息进行整合,利用时序信息对目 标的位置、大小、姿态等进行约束,提高目标检测的鲁棒性 。
时间上下文深度学习模型设计
网络结构
设计适合处理视频数据的深度学 习网络结构,如卷积神经网络( CNN)、循环神经网络(RNN )等,以实现对视频数据的特征
实验验证与分析
01
数据集
选择具有代表性的目标检测数据集,如VOT、OTB等,进行实验验证。
02
实验设置
设定合理的实验参数,如训练批次大小、学习率等,进行模型训练和测
试。
03
实验结果
比较基于空间与时间上下文的深度学习目标检测算法与其他算法的性能
指标,如准确率、召回率、F1分数等。分析算法的优缺点,提出改进方
空间上下文特征
利用目标周围像素的上下文信息,提取目标的形状、大小、方向等特征。通过对目标周围像素的聚合和编码,得到目 标的上下文特征表示。
时间上下文特征
利用视频帧之间的时间相关性,提取目标在连续帧之间的运动、速度、轨迹等特征。通过对连续帧之间的目标进行匹 配和跟踪,得到目标的时间上下文特征表示。
特征融合策略
向。
05
结论与展望
本文工作总结
01 提出了一种基于空间与时间上下文的深度 学习目标检测算法
02
算法通过捕捉空间与时间上下文信息,提 高了目标检测的准确性和鲁棒性
03
通过实验验证了所提算法在多个数据集上 的有效性
04
与现有方法相比,所提算法在准确性和鲁 棒性方面具有优势
未来研究方向展望
基于深度学习的空间目标识别算法研究

基于深度学习的空间目标识别算法研究一、研究现状1. 深度学习技术应用于空间目标识别深度学习是一种结合人工神经网络和大数据处理方法的一种学习算法。
之前,传统的机器学习方法在空间目标识别上表现并不理想,然而近年来深度学习方法在空间目标识别领域表现出了强大的潜力。
例如深度卷积神经网络(Deep Convolutional Neural Network,DCNN)、深度循环神经网络(Deep Recurrent Neural Network,DRNN)等算法不仅取得了优异的分类表现,而且还拥有强大的特征学习能力,可以有效地区别不同的物体。
2. 目标识别的特点与难点目标识别是计算机视觉领域的重要分支,它涉及到图像处理,模式识别以及统计学等多方面的技术。
目标识别面临的主要特点和难点如下:(1)图像噪声:由于收集数据过程中的影响因素和长距离传输过程中的损耗等因素,图像中的噪声会对目标识别造成很大的影响。
(2)大规模自然场景:不同的目标出现在不同的背景下,光照条件等也会随之变化,这样的场景下,目标识别的难度就会加大。
(3)物体遮挡:实际场景中物体的形状变化可能会因为遮挡而无法被完全显示,这样会导致目标的辨别变得困难。
3. 空间目标识别的应用领域空间目标识别可以应用于很多领域,例如智能汽车、无人机、智能手环、工业视觉等等。
典型的空间目标识别有人脸识别、车辆识别、动物识别等等。
二、深度学习的空间目标识别算法1. 算法框架深度学习的算法框架通常包括输入层、多个隐藏层、输出层。
(1)输入层:信息如图像、声音等以数字形式输入。
(2)隐藏层:包含若干个神经元,神经元之间的连接会计算输入信号与权值之间的加权和,再经过激活函数激活输出。
隐藏层可以是多层的,层数越多模型越复杂。
(3)输出层:最后一个隐藏层根据权值和激活函数的输出结果产生最终结果,如图像的分类标签等。
2. DCNN深度卷积神经网络(DCNN)是目前最流行的图像识别深度学习算法之一。
基于深度学习的空间目标识别技术研究

基于深度学习的空间目标识别技术研究随着科技的不断进步,人们对于空间目标的认知越来越深入。
空间目标识别技术的研究,是为了更好地探究、利用和保护太空资源,保证人类未来的发展。
在实现这一任务中,深度学习技术逐渐成为了目前研究的热点。
本文将探讨基于深度学习的空间目标识别技术的研究现状、应用场景及未来发展方向。
一、基于深度学习的空间目标识别技术研究现状随着科技的不断发展,空间目标识别技术也不断升级。
目前,基于深度学习技术的空间目标识别已经成为热点话题。
深度学习技术的主要特点是高效的处理大规模数据,能够自动从原始数据中提取特征,通过多个网络层次的复杂变换学习到高级抽象特征,从而获取最优的分类器。
基于深度学习的空间目标识别技术主要采用卷积神经网络(Convolutional Neural Network, CNN)和循环神经网络(Recurrent Neural Network, RNN)等深度学习方法。
其中,CNN主要用于图像识别,RNN则主要用于序列数据的处理。
随着CNN等深度学习技术的应用,针对卫星数据的分类和识别已经取得了快速进展。
例如,德国国家研究中心通过分析光学和雷达数据,成功实现了对各类敌机的高精度识别,这一成果标志着卫星目标识别技术已经成为了新时代的必需品。
二、基于深度学习的空间目标识别技术应用场景空间目标识别技术的应用朝着多个方向不断发展。
其中,基于深度学习技术的空间目标识别技术具有极大的优势,在军事、民用等行业中都有广泛的应用场景。
1.军事领域在军事领域中,空间目标识别技术是必不可少的一环。
通过卫星观测,先进的空间目标识别技术可以高精度实现对敌方目标的识别与跟踪,从而为军事行动提供重要支撑。
当然,随着社会对和平、发展的追求,军事创新更加注重的是国际合作与和平发展,空间目标识别技术的发展与应用前景也将与此紧密相连。
2.民用领域随着通讯、互联网技术的日益普及,空间目标识别技术的应用日益广泛。
例如,通过高分辨率卫星图像,可以实现对全球土地利用状况的监测,掌握全球资源的利用与分配情况。
基于改进YOLOX的猕猴桃分类识别与空间定位

基于改进YOLOX的猕猴桃分类识别与空间定位刘博文;徐卫平;徐钦;陈华伟【期刊名称】《国外电子测量技术》【年(卷),期】2024(43)4【摘要】复杂自然环境下果实的快速、准确识别和定位是猕猴桃机械臂采摘的关键和难点。
面向猕猴桃实时采摘应用,开展了基于深度学习的猕猴桃分类识别算法、空间定位模型构建和机械臂采摘实验研究。
优选Anchor_Free的一阶段YOLOX算法模型,并通过引入注意力机制、调整通道数、增加特征融合、堆叠特征融合对该模型特征融合环节加以改进,提高了非结构化环境下猕猴桃果实的分类识别精度。
实验数据表明,改进YOLOX算法对独立果实、树叶遮挡、树干遮挡、果实重叠的平均精度(AP)分别提升至99.38%、98.43%、93.82%和92.98%,平均精度均值(mAP)达到96.15%,其平均F1值提升至94.24%,且在640×640分辨率下每幅图像的平均检测时间为0.019 s。
进一步地,利用图像深度信息对识别目标进行三维空间位置求解,并经物理实验验证,实验中果实定位坐标误差≤3.3%。
算法在识别率、检测时间和定位误差3方面取得了较优的综合性能,满足猕猴桃机械臂采摘中果实的实时识别及定位需求。
【总页数】10页(P133-142)【作者】刘博文;徐卫平;徐钦;陈华伟【作者单位】贵州师范大学机械与电气工程学院【正文语种】中文【中图分类】S126;TP249【相关文献】1.基于改进YOLOX与多级数据关联的行人多目标跟踪算法研究2.基于改进轻量化YOLOX的无人机航拍目标检测算法3.基于改进YOLOX的多光谱行人检测算法4.基于改进YOLOX的交通标志检测5.基于改进YOLOX的茶叶嫩芽检测方法分析因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中 心 距 定 义 为
( — ( -歹 z ),其中 一 z ) y )厂( ,
+1 。
,一
;归一化 ( +q )阶
一丛 ,, )一 u Y o
,
o
根 据 二 阶 和 三 阶 中 心 矩 ,可 以推 导 出 以 下 7 不 变 矩 l : 个 7 ]
最大 似然 概率 ( M)算 法 ,该 算法 通过 寻 找概率 模 型 的最 大似 然 概率 来 确 定分 类 ,常 常用 于 处 E ]
理不 完备 的数 据集 。但 是该 算法 对 于初始 值 的选取 非 常 的敏 感 。1 9 9 5年 Va nk提 出了 著名 的支 持 pi 向量机 ( VM)算法 ] S ,该算 法将 向量 映射 到 高维 空 间 中 ,并 在 高维 空 间 中建 立 一 个 或一 组 最 优 超 平 面 ,使 其在 误 判率最 低 的前 提下 达到最 优 的分 类 效 果 。S VM 算 法 的缺 点 是 在处 理 多类 分 类 问
( KVF M) C 。KVF M 算法 不仅 解决 了传 统模 糊 C均 值 ( C C F M)算 法l 中对非 线形数 据 的不可 分 问 5 题 ,而且 相较 于 KF M 算法 ,能 够极 大地 降低 迭 代 过 程 中算 法 陷入 局 部 极 小 值 的 概 率 。此 外 , C ] KVF M 算 法 还改 善 了聚类算 法 的收敛 性 和鲁棒 性 。通 过对 3类航 天 器 图像 的分 类识别 试验 ,验 证 C
≠ 一 '。+ 72 7 z 7, o z一 (2 yo一 72 + 4 , 7) o
声 。一 ( 。 37 ) + ( ' 一 s , 。一  ̄2 1 37 z )
≠ 一 ( s 叩。+ z + (7 ) ' z + 。 , )
s (。 一 3 )(s+ z (。+ 'z 。 3(2+ s ] 一 ' 7 。 叩。 叩。 )[ 。 7 ) 一  ̄ 7 1 ) + (q 一 。 叩 3z )(z + 。 3(s+ 叩2 。)[ 叩 。 1 一 (z ) ' 7 + 。 ], )
21 0 2年 4月 第 2 期
中 国 空 间 科 学 技 术
Chi e e Sp c inc n c o o n s a e Sce e a d Te hn l gy
基 于 改 进 核 聚类 算 法 的空 间 目标 识 别 方 法
王 晓 雪 杨 永 胜 敬 忠 良
问题将 会更 加地 突 出 。为 了满 足实 际应 用 中对 实时性 的要 求 ,更 常见 的 目标识 别方 法是 ,通 过一系 列 的 图像预 处理 后 ,提取 目标 区域 的特 征值 ,再 选择 合适 的分 类技术 对 目标进 行分类 。因此对 分类
算法 的研 究 ,变 成 了模 式 识别 中一 个 重要 的技 术 关键 。常 见 的分 类算 法 有 ,D mp tr 人 提 出 的 e se 等
题 时 ,算法 的计 算代 价太 大 。 本 文综 合考 虑 了 目标 的姿态 、位 置 以及 外 界 光 照 条 件对 目标 的影 响 ,提 出了不 变矩 与 图像 边 缘 、灰 度特 征结 合 的特征 提取 方 法 。针 对 目标 识 别 ,提 出了 一种 基 于 Voo o 距 离 的核 聚类 算 法 rn i
中 国 空 间 科 学 技 术
21 0 2年 4 月
2 特 征 提 取
2 1 Hu不 变 矩 .
Hu不变 矩是 图像 的一 种 统 计 特 征 ,对 图像 的平 移 、缩 放 、镜 像 和 旋 转 都 不 敏 感 。数 字 图像
fx )的 (, 二维 (+q 矩定义为m 一∑ ∑ Y- ) )阶 埘 (, ,其中 q O , , ; 厂 , = ,1 2 … 相应
1 引 言
早期 的模 式识 别 中 ,是 通 过模板 匹配技术 来 进行 目标 的识 别 分类 。例 如 在 文献 [ ] ,首先 通 1中 过提 取测 试样 本 的姿态 和光 照信 息来 构建 一个 特征 空 间 ,然 后再 将待识 别 的样本 投影 到所 构建 的特
征空 间 中来进 行识 别 。文献 [ ] ,是通过 提取 测试 样 本 的局 部邻 域 操 作子 的联 合概 率 来 构建 全局 2中 模 板 。虽 然在 上述 的文 献 中采用 了不 同 的方法来 构建 全 局模板 ,但 是他 们在本 质 上都是 属 于基于模 板 匹配 技术 的模 式识 别方 法 。该算 法 的缺点 是计 算量 特别 大 ,尤其 在 目标复 杂 、模 板数 量多 时这一
(k 交 通 大 学航 空航 天 学 院 ,上 海 2 0 4 ) J海 0 2 0
摘要
根 据 目标 区域 的矩特 征 ,几 何特 征 以及 灰度 特 征 ,提 取 出 目标 的特 征 向 量 ,并
通 过 聚类 算 法对 空间 目标进行 识 别 ,提 出 了一 种基 于 V rn i 离的核 聚 类算 法 ( C 。 oo o距 KF M) 该 算 法通过 引入 一种 新 的距 离度 量 ,使 得 隶属 度 函数 更加 的 明晰 ,改善 了核 聚 类算 法极 易
了该 算法 的可 行性 与正 确性 。
国 家 8 3高 科 技 计 划 ( 0 9 6 2 0 AA7 4 0 5 0 0 0 3 0 ,2 1 AA7 4 0 5 资 助 项 目 030) 收 稿 日期 :2 1-01 。收 修 改 稿 日期 :2 l 1 5 0 11—2 O 1 2O
陷入 最 小值 的 问题 。运 用改进 的核 聚 类算 法对 3类 空间 目标 进行 识 别 ,试 验 结果 验 证 了算
法 的正 确性 和有 效性 。
关 键 词 图像 识 别 核 聚 类 法 特 征 提 取
空 间 目标
DOI 1 . 7 0 j is . 0 0 7 8 2 1 . 2 0 6 : 0 3 8 /. s n 1 0 — 5 X. 0 2 0 . 0