61B中文资料
SEW-MDX61B-异步电机系统调试方法和步骤-总线速度控制-Profinet IO-不带编码器

②Profinet IO网卡:DFE32B ③异步电机…DRE(N)(S)12系统架构:DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动34驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;PLCDRE(N)(S)异步电机硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚PLCDRE(N)(S)异步电机将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:6在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
ENABLE/RAP.STOP端子功能:当ENABLE/RAP.STOP端子置为1时,电机即进入接受总线指令状态;当ENABLE/RAP.STOP端子置为0时,电机处于无控制状态;在电机运行时,将ENABLE/RAP.STOP端子置为0,电机会按参数136设定的值快速停下来,然后处于无控制状态;:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Fieldbus;(总线控制)101→设为Fieldbus;(总线控制)130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)301 →设为60rpm;(输出最小转速)(保证全力矩转速!防止升降驱动坠落);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为Enable/stop;(输出使能)601 →设为No function;602 →设为No function;603 →设为No function;604 →设为No function;700 →设为VFC;(矢量速度控制模式)7731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)831 →设为Rapid stop/fault(总线故障时立即停止输出,持续报警,等待复位信号) 870 →设为Control word 1;(总线PO1定义,控制启动,停止)871 →设为Setpoint speed;(总线PO2定义,发送运行的速度)872 →设为Ramp;(总线PO3定义,发送运行的加减速斜坡)873 →设为Status word 1;(总线PI1定义,反馈驱动器状态;报警信息)874 →设为Actual speed;(总线PI2定义,反馈当前运行的速度)875 →设为Output current;(总线PI3定义,反馈当前运行的电流)876 →设为Yes;(允许总线数据传输)PLC设定至变频器值PO1 : Control word 1 (控制字1)当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按136参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按131;133参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按136参数设定的减速斜率停止;即PO1发0当需要故障复位时,将第6位置为1即可;8如PO1对应QW256,直接赋值到QW256即可PO2 : Setpoint speed (设定速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: Ramp (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可9变频器反馈至PLC值PI1 : Status word 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第620-636页)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第609页)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : Actual speed (实际速度)10速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm 如PI2对应IW258,电机运行的速度,直接从IW258读值即可PI3 : Output current (输出电流)从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:一个MDX61B0040-5A3-4-00(4KW)控制一个3KW的电机PI反馈给PLC的值为01C2(16进制),换算为10进制为450从驱动器系统手册可查出MDX61B0040-5A3-4-00的额定输出电流为9.5A则电机实际运行的电流为9.5A * 450/1000 = 4.3A11电磁干扰屏蔽安装要求控制器至电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。
MDX61B应用介绍

设备类型应选择 为Movidrive B
软件启动画面
Guangzhou / liushaoyuan / Feb 21, 2010
Driving the world
Training \ Guangzhou \ Driving Control Products
16
二、MDX61B参数设置
1、MOVITOOLS软件的使用
电机的Load inertia可以通过三种 方法获得。
Driving the world
Training \ Guangzhou \ Driving Control Products
23
二、MDX61B参数设置
2、电机初始化 (1)、通过点击“determine automatically”按钮,在弹出对话框中点“确定” 按钮,然后让系统高速运转一个行程,此时Load inertia显示框的数据会发 生变化,记录下显示的最大值,然后将该值输入。(主要用于客户自己不能 精确地计算出系统的惯量)
软件界面 MOVITOOLS
示波器软件 SCOPE 达高EMC标准:内置式输入滤波器达BG II级
对电网干扰低,输入电流低
达到标准和认证:
Guangzhou / liushaoyuan / Feb 21, 2010
Driving the world
Training \ Guangzhou \ Driving Control Products
Driving the world
Training \ Guangzhou \ Driving Control Products
22
二、MDX61B参数设置
2、电机初始化
电机控制模式选择画面 变频器中有应用IPOS程序就要选 择Positioning with IPOS.
故障表_SEW-MDX61B
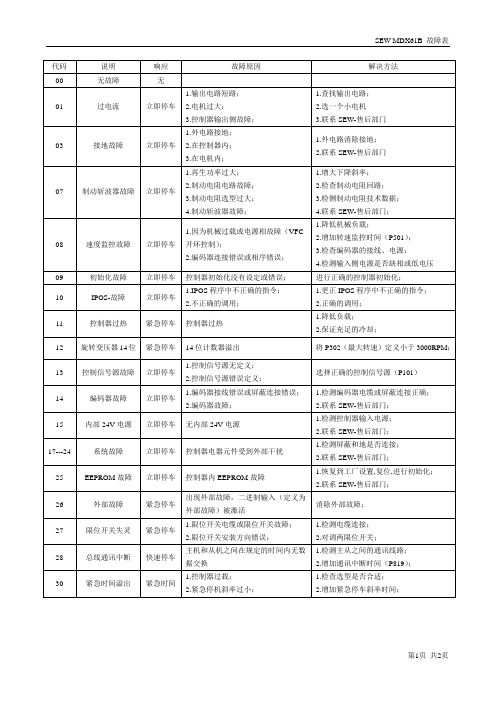
30
紧急时间溢出
紧急时间
1.控制器过载;
2.紧急停机斜率过小;
1.检查选型是否合适;
2.增加紧急停车斜率时间;
31
电机TF/TH触发
无响应
1.电机过热;
2.电机TF/TH无连接或连接不正确;
3.控制器和TF之间的电缆中断;
4.X10:1和X10:2的短接线中断;
5.对于MDS控制器,X15:9和X15:5的短接线中断;
2.保证充足的冷却;
12
旋转变压器14位
紧急停车
14位计数器溢出
将P302(最大转速)定义小于3000RPM;
13
控制信号源故障
立即停车
1.控制信号源无定义;
2.控制信号源错误定义;
选择正确的控制信号源(P101)
14
编码器故障
立即停车
1.编码器接线错误或屏蔽连接错误;
2.编码器故障;
1.检测编码器电缆或屏蔽连接正确;
3.位置调节器P-增益过小;
4.速度调节器P-增益过小;
5.位置偏差设定值过小;
6.给定转速大于电机的额定转速;
1.改变编码器的级性;
2.增加上升斜率时间;
3.增加位置调节器P-增益;
4.从新优化转速调节器;
5.检查电机和控制器的相序连接;
43
RS-485通讯中断
快速停车
控制器和PC之间通讯中断
1.检测控制器和PC通讯线路;
2.联系SEW-售后部门;
44
系统利用率故障
立即停车
系统利用率大于125%
1.降低控制器的功率输出;
2.增加斜率时间;
3.增加控制器的功率;
SEW MOVIDRIVE MDX61B调试步骤同步伺服(binary setpoint)

9、选择“Execute complete start-up(执行完整的初始化)”;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
4、定义硬件名称,点击“finish”开始硬件配置;
5、硬件配置中;
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进 制输入,然后点击“startup”;
7、点击“perform startup”,开始初始化;
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数 运行,parameter set-2设置采取同样步骤);
SEW MOVIDRIVE MDX61B调试步骤
(binary setpoint)
WEISS-CHINA
2014/05
1、打开MOVITOOLS MotionStudio软件,创建项目;
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
3、选择“configure device”,对连接到的设备进行硬件配置;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包示框,点击“确定”;
BCM62B,215;中文规格书,Datasheet资料

Symbol Parameter
Per transistor TR1
VCEO hFE
collector-emitter voltage DC current gain
Per transistor
IC
collector current
Per device
IC1/IE2
current matching
Conditions
Ce
emitter capacitance VEB = −0.5 V;
IC = ic = 0 A;
f = 1 MHz
fT
transition frequency VCE = −5 V;
IC = −10 mA;
f = 100 MHz
NF
noise figure
VCE = −5 V; IC = −0.2 mA; RS = 2 kΩ; f = 10 Hz to
BCM62B
PNP/PNP matched double transistor
5. Limiting values
Table 5. Limiting values In accordance with the Absolute Maximum Rating System (IEC 60134).
Symbol Parameter
Unit K/W K/W
BCM62B_2
Product data sheet
/
Rev. 02 — 28 August 2009
© NXP B.V. 2009. All rights reserved.
3 of 13
NXP Semiconductors
BCM62B
PNP/PNP matched double transistor
MITSUBISHI CC-Link数字模拟变换模块 用户说明书
! 危险
表示错误操作可能造成灾难性后果 引起死亡或重伤事故
! 小心
表示错误操作可能造成危险后果 引起人员轻伤 中度伤害或财产 损失
注意根据情况不同 ! 小心这一级也能引发严重后果 因此一定要遵守以上两级对人员安全非常重要的注意事项
请仔细保管本手册 把它放在最终使用者易于取阅的地方
[设计注意事项]
! 危险
[接线注意事项] ! 小心
在开始安装 接线或其它工作之前 必须断开外部所有相的电源 不这样做可能会损坏产品或出现故障 必须把 FG 端子接到保护接地导线上再接地 不这样做可能导致故障 在确认了产品的额定电压和端子接线正确无误之后再为模块正确接线 不这样做可能导致火灾或失效 一定要在规定扭矩范围内紧固端子螺钉 如果没有拧紧可能导致短路或故障 如果拧得过紧可能由于损坏螺钉或模块而导致短路或故障 一定不要让异物 如碎片或接线头 进入模块 异物进入模块可能导致火灾 失效或故障
在符合本手册中规定的一般操作环境规格下使用 PLC 在不符合本手册中规定的一般操作环境规格下使用 PLC 时 可能会引起电击 火灾 故障 并 会损坏模块 或使模块性能变差 把模块紧固到 DIN 导轨上 或用安装螺钉紧固 但要在规定扭矩范围内拧紧安装螺钉 如果没有拧紧可能导致跌落或故障 如果拧得过紧可能由于损坏螺钉或模块而导致跌落或故障 不要触摸模块的导电区或电器部件 这样做可能导致模块故障或断裂
ቤተ መጻሕፍቲ ባይዱ
本手册阐述了MELSECNET/10网络系统(PC-to-PC网络)的系统配置,特点,功能,设置和
编程。
MELSECNET/10网络系统(远程I/O网络)
SH(NA)-080214C
本手册阐述了MELSECNET/10网络系统的配置,操作特性,功能,设置和编程。
SEW MDX61B_变频器说明书(1)

选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW-MDX61B-同步伺服调试方法-总线位置控制-6PD-Profinet IO-双驱力矩分配升降-带增量型编码器R..M(L)

配置:①驱动器MDX61B… ②编码器板DER11B ③Profinet IO 网卡:DFE32B④同步伺服电机-带增量型编码器…CM…RH1M(L)系统架构:L1L2L3PE电机编码器CM / CMP(Z)同步伺服电机硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)驱动器输出U,V,W 须与伺服电机的U,V,W将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
ENABLE/RAP.STOP端子功能:当ENABLE/RAP.STOP端子置为1时,电机即进入0速力矩保持状态;当ENABLE/RAP.STOP端子置为0时,电机处于无控制状态;在电机运行时,将ENABLE/RAP.STOP端子置为0,电机会按参数136设定的值快速停下来,然后处于无控制状态;当电机运行到达设定位置,电机即进入0速力矩保持状态。
FAULT RESET端子功能:当遇到非正常情况,伺服系统报警停机,在排除故障原因后,可给FAULT RESET端子一个脉冲信号,使伺服系统退出报警状态:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数主机参数:100→设为Fieldbus;(总线控制)101→设为Fieldbus;(总线控制)130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)200 →设为所需值;(电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值)301 →设为0;(输出最小转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);304 →设为所需值;(输出最大力矩限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警); 600 →设为Enable/stop;(输出使能)601 →设为Fault reset;(故障复位)602 →设为NO FUNCTION;603 →设为NO FUNCTION;604 →设为/External fault;(从机故障通知)622 →设为Rotating field ON;(电机是否运行)623 →设为IPOS in position;(目标位置到位)624 →设为/Fault;(故障报警)700 →设为Servo & IPOS;(伺服位置控制模式)731 →制动器释放时间,升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)750 →设为Torque SBus;(力矩控制从机模式)830 →设为Rapid stop/fault(从机故障时立即停止输出,持续报警,等待复位信号)831 →设为Rapid stop/fault(PN总线故障时立即停止输出,持续报警,等待复位信号)836 →设为Rapid stop/fault(SBUS总线故障时立即停止输出,持续报警,等待复位信号)870 →设为IPOS PO data;(总线PO1定义,控制零点坐标系建立;发送速度值)871 →设为Setpoint position high;(总线PO2定义,发送要到达目标位置脉冲值高位)872 →设为Setpoint position low;(总线PO3定义,发送要到达目标位置脉冲值低位)873 →设为Status word 1;(总线PI1定义,反馈驱动器状态;到位信息) 874 →设为Actual position high;(总线PI2定义,反馈当前位置脉冲值高位)875 →设为Actual position low;(总线PI3定义,反馈当前位置脉冲值低位)876 →设为Yes;(允许总线数据传输)881 →设为1;(主机SBUS总线地址)882 →设为1;(主从机SBUS总线组地址)883 →设为0.1;(主从机SBUS总线通讯监控时间)910 →设为所需值;(位置控制运行时,电机的位置环增益,建议0.1-0.4)911 →设为所需值;(位置控制运行时电机的加速时间)912 →设为所需值;(位置控制运行时电机的减速时间)922 →设为所需值;(目标位置到位窗口,默认值50)923 →设为所需值;(位置运行曲线跟踪窗口,默认值5000)从机参数:100→设为Master SBus 1;(SBUS总线控制)101→设为Terminals;(端子控制)130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)200 →设为所需值;(电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值)301 →设为0;(输出最小转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);304 →设为所需值;(输出最大力矩限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警); 600 →设为No function;(无功能)601 →设为Fault reset;(故障复位)602 →设为NO FUNCTION;603 →设为NO FUNCTION;604 →设为NO FUNCTION;621 →设为/Fault;(故障报警)622 →设为Rotating field ON;(电机是否运行)623 →设为No function;(无功能)624 →设为/Fault;(故障报警)700 →设为Servo & torque control;(伺服力矩控制模式)731 →制动器释放时间,升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)750 →设为Master/slave off;(主机功能关闭)751 →设为1;(与主机按1:1分配输出力矩)830 →设为Rapid stop/fault(从机故障时立即停止输出,持续报警,等待复位信号)831 →设为Rapid stop/fault(PN总线故障时立即停止输出,持续报警,等待复位信号)836 →设为Rapid stop/fault(SBUS总线故障时立即停止输出,持续报警,等待复位信号)870 →设为Control word 1;(总线PO1定义,控制电机启动,停止)871 →设为Setpoint current;(总线PO2定义,发送从机需要输出的力矩值) 872 →设为IPOS PO data;(总线PO3定义,保留未使用)873 →设为Status word 1;(总线PI1定义,反馈驱动器状态)874 →设为Actual speed;(总线PI2定义,反馈当前电机运行的速度)875 →设为IPOS PI data;(总线PI3定义,保留未使用)876 →设为Yes;(允许总线数据传输)881 →设为2;(从机SBUS总线地址)882 →设为1;(主从机SBUS总线组地址)883 →设为0.1;(主从机SBUS总线通讯监控时间)从机S12需置于ON处PLC设定至变频器值PO1 : IPOS PO-DATA第一个PO字发1至驱动器,表示将当前位置的坐标清零,建立机械坐标系;发其它数值至驱动器,表示设定所需的速度,比例为0.1,如需按500rpm运行,发5000即可如PO1对应QW256,直接赋值到QW256即可PO2 : Setpoint position high ;PO3 : Setpoint position low所需电机要到达的位置可通过总线第二和第三个PO字双字格式进行控制如PO2对应QW258;PO3对应QW260;想让电机运行到1000000脉冲(电机4096脉冲/转)的目标位置,直接赋值到QD258即可PO4 : IMAX表示设定所需输出的最大力矩,比例为0.1,如需按70%输出限幅,发700即可如PO4对应QW262,直接赋值到QW262即可PO5 : Accelerating ramp表示设定所需加速斜坡时间,比例为1:1ms,如需按3s(0-3000rpm)斜坡加速,发3000即可如PO4对应QW264,直接赋值到QW264即可PO6 : Deceleration ramp表示设定所需减速斜坡时间,比例为1:1ms,如需按2s(0-3000rpm)斜坡加速,发2000即可如PO6对应QW266,直接赋值到QW266即可变频器反馈至PLC值PI1 : Status word 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第620-636页)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义请看SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第609页)如PI1对应IW256想知道系统的相应状态,直接从IW256读值即可PI2 : Actual position high ;PI3 : Actual position low伺服系统的当前位置坐标可通过总线第二和第三个PI字双字格式读上来如PI2对应IW258;PI3对应IW260;想知道电机运行到什么位置,直接从ID258读值即可PI4 :Actual speed如PI4对应IW262想知道电机运行的速度,直接从IW262读值即可比例为0.1,如读取值为6000,则实际值为600rpmPI5 :Actual current如PI5对应IW264想知道电机实际输出的有功电流(力矩),直接从IW264读值即可PI6 :OUTPUTS如PI6对应IW266想知道驱动器的DO输出状态,直接从IW266读值即可:使用MOTION STUDIO软件,输入驱动器内位控程序总线位控模式运行时,伺服控制器内接口程序SET H200 = 3 //设定接口格式:外部总线数据传输SET H201 = 6 //设定接口格式:6个POSET H211 = 6 //设定接口格式:6个PIM2: GETSYS H200 = PO-DATA //接收PO数据值SET H222 = H202SET H223 = H202SETSYS POP.SPEED C(CW) = H222 //对运行速度赋值SETSYS IMAX = H205 //对最大输出力矩赋值SET H226 = H206SET H227 = H207SETSYS POP.RAMP = H226 //对加减速时间赋值SET H492 = H499 //对运行的目标位置赋值SETSYS PI-DATA = H211 //读取PI数据值GETSYS H215 = ACT . SPEED //读取实际运行速度值GETSYS H216 = ACTUAL . CURRENT //读取实际输出力矩值SET H217 = H521 //读取输出点的状态值JMP H202 == 1, M1 //置零点坐标条件;RETM1: SET H511 = 0 //如果总线传送的第一个字值为1,将当前的位置坐标置为0(建立坐标系);WAIT 100msJMP UNCONDITIONED , M2RETEND由于此程序利用总线第一个传送字既作为速度传送,也作为置坐标指令传送,因此在发送时应根据实际情况进行:由于此程序利用总线第一个传送字既作为速度传送,也作为置坐标指令传送,因此在发送时应根据实际情况进行:如:总线第一个传送字发送1到伺服系统内,伺服系统将按0.1rpm(0.1的比例),以及第二和第三个传送字发来的目标坐标值进行定位运行;但由于也同时将当前的位置坐标置为0,如果第二和第三个传送字发来的目标坐标值与0不同,伺服系统将按0.1rpm不断朝一个方向运行;在需要进行回零操作时,应先将系统运行到机械零点位置,然后将ENABLE/RAP.STOP端子置为0,等待50ms后在给第一个传送字发送1,则伺服驱动器坐标系清零;然后在给第一个传送字发送0,第二和第三个传送字发送0,然后将ENABLE/RAP.STOP端子置为1,伺服系统进入0速力矩保持状态,等待运行;如果仅将第一个传送字发送0,第二和第三个传送字发送的坐标值与当前的坐标值不同,在将ENABLE/RAP.STOP端子置为1后,伺服系统会以极低的速度朝第二和第三个传送字发送的坐标值运行,而不会以0速停在原地。
SEW-MDX61B驱动器-DFP21B_Profibus通讯

DFP21B卡及Profibus-DP 总线通讯功能DFP21B总线板概述总线协议选项通讯速率支持总线连接形式总线终端电阻站地址GSD文件DFP21B总线板电源灯总线故障灯DP-地址D型9针插头总线终端电阻如果MDX系列控制器在PROFIBUS网的开端或在网的末端,总线终端电阻需要激活----增加总线系统的抗干扰能力。
DP地址¾PROFIBUS从站地址通过DIP拨码开关设定;¾PROFIBUS支持0---125地址范围;¾控制器得电时,设置DIP拨码开关无效,站地址只有在断开电源再合电后,才有效;¾DP地址可在P092参数显示;DIP-地址拨码开关指示灯说明PROFIBUS 选件卡DFP21B有2个LEDs指示灯,表示当前选件卡的状态和PROFIBUS 系统的状态。
LED RUN(绿色):显示总线电路是否正常LED BUS FAULT(红色):显示PROFIBUS-DP状态DFP21B-ProfiBus 总线通讯MDX变频器参数设置说明DP---结构PROFIBUS-DP支持参数通道和过程字通道;参数通道为非周期性的数据交换,用于访问和设置控制器的参数; 过程字通道为周期性的数据交换,用于访问和设置过程值;过程值的个数和结构:说明:支持过程值通道和参数通道;过程值通道最多支持10个过程输入字和10个过程输出字;前三个过程值的含义可以在参数中设定,后面的过程值可在IPOS程序中调用;过程值描述过程输出值(PO)过程输入值(PI)¾过程值分为过程输出字和过程输入字;¾过程输出值为PLC→控制器的数值,包括控制字和设定值;¾过程输入值为控制器→PLC的数值,包括状态字和实际值;过程值描述过程值值比例PLC过程值过程输出字P870:PO1P871:PO2P872:PO3P876总线PO值使能PO值使能如果修改了PO1、PO2和PO3的设定含义,P876会自动恢复到OFF状态;需要人为的将P876设定为ON状态,系统才可确认PO1、PO2和PO3的设定值;Control Word1说明:控制字1的低字节控制器禁止使能/快停使能/停车保持控制斜率发生器组选择参数组选择故障复位e.g…00hex …02hex1控制字说明控制器禁止:0001hec 快停:0000hec正常停车:0002hec 使能:0006hec控制字1的高字节电动电位计方向选择9电动电位计转速增加10 电动电位计转速减速固定转速设定值选择固定转速设定组选择高字节主要控制电动电位计和固定转速设定值控制字2说明:控制字2的低字节和控制字1的低字节相同,高字节为虚拟端子。
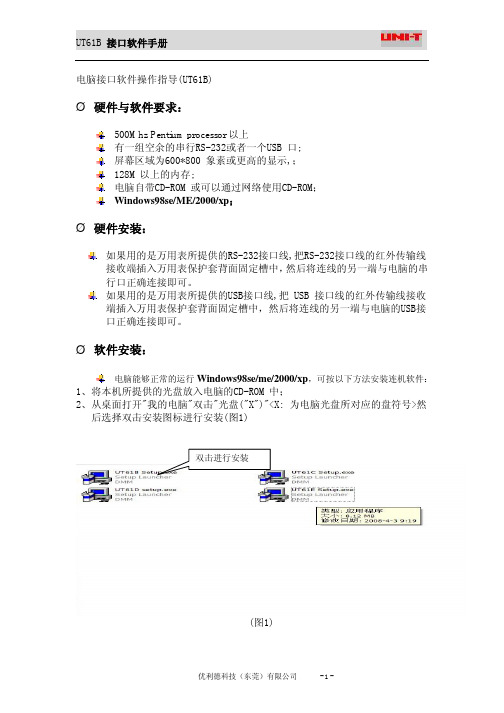
UT61B 接口软件操作说明
优利德科技(东莞)有限公司
-6-
UT61B 接口软件手册
图九
Ø 记录操作:
(图 十) 此电脑连接软件,可对所接收到的数据予以存盘、清除,另外还有数据重 复记录保留/忽略选项和采样间隔选项。见图十 清除记录:是清除软件中现有记录。 记录存盘:保存现有记录,可存为EXCEL(*.xls)、文本文件(*.txt) 其中数据库文件可直接在此软件中再次打开。 打开记录文件:是打开以前保存的数据库(*.xls)格式文件。 打印记录:是打印现有记录。 重复记录保留/忽略:是指在若万用表测量的结果与前一结果完全一样 时,此时是否将相同的记录保存。若选择相同的记录不保存,有助于延
。
优利德科技(东莞)有限公司客户服务热线: 0769---85723288
** 结束 **
优利德科技(东莞)有限公司
-9-
Ø 软件安装:
电脑能够正常的运行 Windows98se/me/2000/xp,可按以下方法安装连机软件:
1、将本机所提供的光盘放入电脑的CD-ROM 中; 2、从桌面打开"我的电脑"双击"光盘("X")"<X: 为电脑光盘所对应的盘符号>然 后选择双击安装图标进行安装(图1)
双击进行安装
(图1)
优利德科技(东莞)有限公司
双击进行测试
图五;
优利德科技(东莞)有限公司
-3-
UT61B 接口软件手册
Ø 接口软件操作: 软件正确安装,同时确认万用表与电脑连接好以后,现在就可以运行电脑接 口连接软件了,用户按下"开始"-"程序"-"DMM Interface Program"中的 "UT61B",程序开始运行, 见图六; 在开始连接电脑与万用表之前,请先在菜单上按下"COM Setup",选择相应的 串行口, 共有串行口1.2.3.4 可以选择.设置串口好以后,按住万用表上的"COM Connect"按钮,使万用表进入连机状态,电脑开始接收并记录数据. 现将软件中 将会出现的按钮一一介绍, 并将重点介绍软件中的图形操作。
SEW-MDX61B-异步电机系统调试方法和步骤-正反转-模拟量控制-端子模式-不带编码器

②异步电机-不带型编码器…DRE(N)(S)...12系统架构:DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动34DRE(N)(S)...异步电机驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;PLC从驱动器至电机处的动力线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从驱动器至电机处的动力线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚PLCDRE(N)(S)...异步电机/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
FAULT RESET端子功能:当遇到非正常情况,伺服系统报警停机,在排除故障原因后,可给FAULT RESET端子一个脉冲信号,使伺服系统退出报警状态:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Unipolar/fixed setpoint;(单极性模拟量/固定点设定)101→设为Terminals;(端子控制)112→设为10 V, reference maximum speed;(0-10V模拟量控制)或4-20 mA, reference maximum speed;(4-20 mA模拟量控制)与S11开关的拨码位置必须对应,否则变频器将会按最大速度输出130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)160 →设为所需值;(接通n11/n21固定速度端子时,电机运行速度)161 →设为所需值;(接通n12/n22固定速度端子时,电机运行速度)162 →设为所需值;(接通n13/n23固定速度端子时,电机运行速度)301 →设为60;(输出最小转速)(保证全力矩转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为CW/stop;(正转)601 →设为CCW/stop;(反转)6602 →设为Enable/stop;(输出使能)603 →设为n11/n21;(固定速度1)604 →设为n12/n22;(固定速度2)620 →设为/Fault;(故障报警)621 →设为Rotating field ON;(电机是否运行)700 →设为VFC;(电压矢量控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)模拟量控制:电压或电流信号选择电磁干扰屏蔽安装要求驱动器器至电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠7紧固,大面积接地8。
豪森 sew 伺服电机 MDX61B 使用说明书
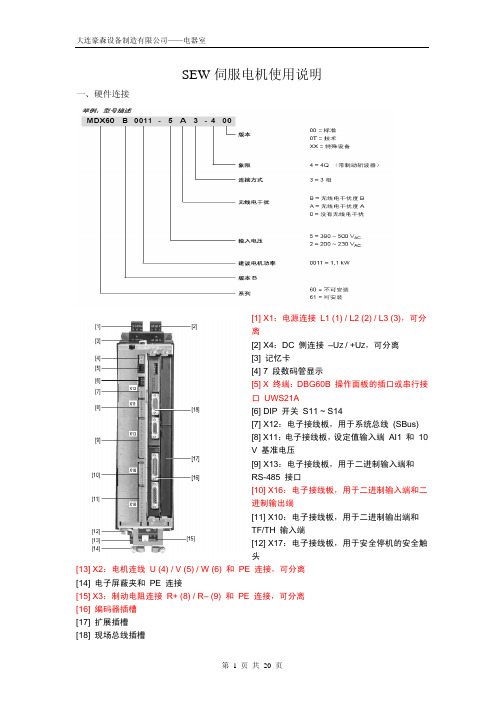
SEW伺服电机使用说明一、硬件连接[1] X1:电源连接 L1 (1) / L2 (2) / L3 (3),可分离[2] X4:DC 侧连接 –U Z / +U Z,可分离[3] 记忆卡[4] 7 段数码管显示[5] X 终端:DBG60B 操作面板的插口或串行接口 UWS21A[6] DIP 开关 S11 ~ S14[7] X12:电子接线板,用于系统总线 (SBus)[8] X11:电子接线板,设定值输入端 AI1 和 10V 基准电压[9] X13:电子接线板,用于二进制输入端和RS-485 接口[10] X16:电子接线板,用于二进制输入端和二进制输出端[11] X10:电子接线板,用于二进制输出端和TF/TH 输入端[12] X17:电子接线板,用于安全停机的安全触头[13] X2:电机连线 U (4) / V (5) / W (6) 和 PE 连接,可分离[14] 电子屏蔽夹和 PE 连接[15] X3:制动电阻连接 R+ (8) / R– (9) 和 PE 连接,可分离[16] 编码器插槽[17] 扩展插槽[18] 现场总线插槽电器原理图及接线图见附件4(硬件图纸)。
不同编码器接线图见附件3(相关资料)中MDX61B中文操作手册55-65页。
制动电阻选型:根据电机功率和应用方式进行选择。
1.制动电阻参数:配合11kw控制器:大于22欧姆,推荐39欧姆 2.5kw配合4kw控制器:大于68欧姆,推荐100欧姆 2kw 升降驱动配合1.5kw控制器:大于68欧姆,推荐100欧姆 800w 升降驱动配合1.1kw控制器:大于68欧姆,推荐100欧姆600w配合1kw控制器:大于68欧姆,推荐100欧姆500w配合0.75kw控制器:大于68欧姆,推荐100欧姆400w配合0.55kw控制器:大于68欧姆,推荐100欧姆 200w配合0.37kw控制器:大于68欧姆,推荐100欧姆 450w2. 上海鹰峰科技(制动电阻厂家)电话:021-57847739(直线)021-57810277-801、802 王扶林其他注意事项:1、再调试时,要在伺服控制器X13接口板的DI00管脚处串入急停按钮,以确保发生紧急情况时,能够紧急停止;同时,在对伺服控制器参数进行调整时,也必须断掉DI00处使能,然后经过改动的数据才能下载。
195-2011 中国联通M2M UICC卡技术规范V2.0
I
中国联通 M2M UICC 卡技术规范 v2.0
6.2.1.2 封装顶部的方向标....................................................................................................................... 11 6.2.2 MFF2 ..................................................................................................................................................... 11
6.2.1 MFF1 ....................................................................................................................................................... 9 6.2.1.1 封装底部的方向标....................................................................................................................... 11
SEW-MDX61B驱动器-DFP21B_Profibus通讯
DFP21B卡及Profibus-DP 总线通讯功能DFP21B总线板概述总线协议选项通讯速率支持总线连接形式总线终端电阻站地址GSD文件DFP21B总线板电源灯总线故障灯DP-地址D型9针插头总线终端电阻如果MDX系列控制器在PROFIBUS网的开端或在网的末端,总线终端电阻需要激活----增加总线系统的抗干扰能力。
DP地址¾PROFIBUS从站地址通过DIP拨码开关设定;¾PROFIBUS支持0---125地址范围;¾控制器得电时,设置DIP拨码开关无效,站地址只有在断开电源再合电后,才有效;¾DP地址可在P092参数显示;DIP-地址拨码开关指示灯说明PROFIBUS 选件卡DFP21B有2个LEDs指示灯,表示当前选件卡的状态和PROFIBUS 系统的状态。
LED RUN(绿色):显示总线电路是否正常LED BUS FAULT(红色):显示PROFIBUS-DP状态DFP21B-ProfiBus 总线通讯MDX变频器参数设置说明DP---结构PROFIBUS-DP支持参数通道和过程字通道;参数通道为非周期性的数据交换,用于访问和设置控制器的参数; 过程字通道为周期性的数据交换,用于访问和设置过程值;过程值的个数和结构:说明:支持过程值通道和参数通道;过程值通道最多支持10个过程输入字和10个过程输出字;前三个过程值的含义可以在参数中设定,后面的过程值可在IPOS程序中调用;过程值描述过程输出值(PO)过程输入值(PI)¾过程值分为过程输出字和过程输入字;¾过程输出值为PLC→控制器的数值,包括控制字和设定值;¾过程输入值为控制器→PLC的数值,包括状态字和实际值;过程值描述过程值值比例PLC过程值过程输出字P870:PO1P871:PO2P872:PO3P876总线PO值使能PO值使能如果修改了PO1、PO2和PO3的设定含义,P876会自动恢复到OFF状态;需要人为的将P876设定为ON状态,系统才可确认PO1、PO2和PO3的设定值;Control Word1说明:控制字1的低字节控制器禁止使能/快停使能/停车保持控制斜率发生器组选择参数组选择故障复位e.g…00hex …02hex1控制字说明控制器禁止:0001hec 快停:0000hec正常停车:0002hec 使能:0006hec控制字1的高字节电动电位计方向选择9电动电位计转速增加10 电动电位计转速减速固定转速设定值选择固定转速设定组选择高字节主要控制电动电位计和固定转速设定值控制字2说明:控制字2的低字节和控制字1的低字节相同,高字节为虚拟端子。
MDX61B电子产品介绍分析
需要的选件
选件槽
HIPEFACE®编码器卡DEH11B 1
旋转变压器卡DER11B
输入/输出卡DIO11B PROFIBUS接口DFP21B INTERBUS接口DFI11B Ehternet接口DFE11B DeviceNet接口DFD11B CANopen接口DFC11B
控制特性
斜坡转换方式(总计4个斜坡) 电动电位器,可以结合模拟量设定值和内部设定值 外部设定值选择:0~10V,-10~10V,0-20mA,4~20mA S形曲线,转速无突然变化 可编程序的输入特性,便于灵活的设定 6个双极性固定设定值,可结合外部设定值和电动电位器的动作 频率输入 可调整的突变限制功能 系统总线,最多64个MOVIDRIVE变频器相互联网 RS-485接口,用于PLC/PC和最多31个变频器之间进行通讯 使用键盘或PC直接启动和参数设定 插入式存贮器模块,便于快速更换
标准:
德国
EN 欧洲 美国
加拿大 澳大利亚
SEW-SUZHOU / Electronic Sales & Support / October 1, 2020
Driving the world
Gearmotors \ Industrial Gear Units \ Drive Electronics \ Drive Automation \ Services
Driving the world
Gearmotors \ Industrial Gear Units \ Drive Electronics \ Drive Automation \ Services
AT45DB161(中文)

关于模拟SPI总线读写A TDB161一、芯片概述DataFlash-A T45DB161 B是美国Atmel公司推出的大容量串行Flash存储器产品,采用NOR技术制造,可用于存储数据或程序代码,其产品型号为A T 4 5一DBxxxx,容量从lM 到256M。
A T45DB161B是DataFlash系列中的中档产品,单片容量为1 6Mb,其引脚及功能分别为:/CS:片选信号,SCK:串行时钟输入信号;SI:串行输入。
SO:串行输出。
/wP:写保护引脚,/RESET:复位引脚。
RDY/BUSY:准备好/忙信号。
NC:未用引脚。
A T45 DB 1 61B的内部逻辑结构分为三个部分:存储页阵列(主存)、缓存与I/O接口。
A T45DB161B的存储页面大小为52 8字节,整个存储器共分为409 6页,片内集成了两个52 8字节的SRAM 缓存。
A TDB161系列存储器可以按地址从低到高顺序读写,也可以随机读写任一字节的数据。
对于顺序读数据,可以使用连续读主存页阵列命令(操作码6 8 H 或E 8 H)从给定的起始地址开始连续读出数据,中间不需用户干预。
也可使用读单页主存命令(操作码5 2 H 或D2H),自行提供页地址读取数据。
对于顺序写数据,可以使用通过缓存写主存页命令(操作码82H 或85H ),直接将数据写人主存。
也可以先使用写缓存命令(操作码84H 或8 7H),将数据写入缓存,在适当的时刻再使用缓存写主存页命令(操作码8 3H 或86H),将缓存中的数据写入主存。
因此可以灵活的选择不同的读写方式对存储器进行读写操作。
在这里使用顺序读写Fla sh操作命令,并配合SPI模式0时序对Flash进行读写。
A TDB161具有16M的存储空间,可以存储较大的数据,而且是通过SPI总线来访问的,所以不占用什么资源。
A TDB161有16M的存储空间,有三个区域,4092页,每页有528(512)BYTE,还有两个缓冲区。
SEW MDX61B_变频器说明书(1)
选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW-MDX61B-异步伺服系...

SEW-MDX61B-异步伺服系...③异步伺服电机-带增量型编码器…DRL…ES(G)7S 12系统架构:L1L2L3PEDRL...异步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动34DRL 异步伺服电机驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从伺服驱动器至伺服电机处的动力线和编码器线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题驱动器处编码器连接为D 型插头15芯针型插头制动整流块2,3端为输入,输入电压见电机铭牌左下脚;电机处编码器连接为端子的8芯屏蔽信号线白+黑黄绿红蓝粉灰编码器电缆型号拖缆用:1332458613324594SEW-增量型编码器 E...S :Sin/Cos 信号(SEW 编码器电缆颜色)棕+紫PLC硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5DRL 异步伺服电机驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆从伺服驱动器至伺服电机处的动力线和编码器线中间不要加入接线端子或隔离开关,会将线缆的屏蔽层隔断,导致干扰问题电机处编码器连接为端子驱动器处编码器连接为D 型插头15芯针型插头的8芯屏蔽信号线+黑蓝粉灰制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚编码器电缆型号拖缆用:1332458613324594SEW-增量型编码器 E...S :Sin/Cos 信号(SEW 编码器电缆颜色)+紫PLC/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Reverse voltage Forward current Peak forward surge current (Non-repetitive 60Hz sine wave) Power dissipation Junction temperature Storage temperature range ※ Total rating
Ta=25°C
Symbol
VR IF IFSM PD
※
Rating
30 200 2 200 150 -55 ~ 150
Unit
V mA A mW °C °C
TJ Tstg
Electrical Characteristics
Characteristic
Forward voltage Reverse current Total capacitance ※ per each unit
1.90~2.10 0.19 Max.
3
2
1
0.85~0.95
4 5
0.10 Max. 0.25 Min.
6
• PIN Connections 1, 2, 3: Cathode 4, 5, 6: Anode
KSD-D5S004-000
1
元器件交易网
SUB610
Absolute Maximum Ratings
㎂
元器件交易网
Semiconductor
SUB610
Schottky Barrier Diode
Features
• • • • Small SMD package & 3chip array Low reverse current: IR=1 ㎂ Max. @ VR=30V Low power rectified High reliability
KSD-D5S004-000
2
元器件交易网
SUB610
Electrical Characteristic Curves (per each unit)
Fig. 1 IF - VF Fig. 2 IR - VR
Fig. 3 CT - VR
The AUK Corp. products are intended for the use as components in general electronic equipment (Office and communication equipment, measuring equipment, home appliance, etc.). Please make sure that you consult with us before you use these AUK Corp. products in equipments which require high quality and / or reliability, and in equipments which could have major impact to the welfare of human life(atomic energy control, airplane, spaceship, transportation, combustion control, all types of safety device, etc.). AUK Corp. cannot accept liability to any damage which may occur in case these AUK Corp. products were used in the mentioned equipments without prior consultation with AUK Corp.. Specifications mentioned in this publication are subject to change without notice. KSD-D5S004-000 3
Ta=25°C
Symbol
VF IR
※ ※ ※
Test Condition
IF=10mA IF=30mA VR=30V VR=1V, f=1MHz
Min. Typ. Max.
7.7 0.4 0.5 1 -
Unit
V V µA pF
CT
※ Recommend PCB solder land (Unit : mm)
Ordering Information
Type No. SUB610 Marking 61B Package Code SOT-363
Outline Dimensions
unit : mm
1.95~2.25 0.65 Typ. 1.15~1.35
0.30 Max.
1 2 3
0.65 Typ.
6 5 4