机械手设计计算说明书
机械手手臂设计
仲恺农业工程学院《机械系统》课程设计说明书设计题目:工业机械手设计—臂部伸缩指导老师:张日红关秋菊院系:机电工程学院班级:机械072班姓名:蔡钟文学号:200710824224前言 (3)一、设计要求及主要参数: (3)二、机械手臂伸缩机构设计 (4)1、结构初设计 (4)2、结构改进 (5)3、手臂伸缩驱动力计算 (5)4、手臂伸缩液压缸参数计算 (6)三、液压传动与控制系统设计 (9)四、机械手的控制 (11)1、电气控制系统: (11)2、机械手可编程顺序控制 (11)五.总结 (17)六.参考文献 (17)前言机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产品。
不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供的性能,质量和成本,都对国民经济各部门技术进步和经济效益有很大的影响。
机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。
因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。
工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手是工业机器人的一个重要分支。
它能模仿人手的某些动作功能,按照编程来完成各种预期的作业任务。
在某些方面它可代替人的繁重劳动以实现生产的机械化和自动化,显著地减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。
工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是最有效的。
不仅如此,机械手还能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,具有强大的生命力。
随着机械手在工业的各个领域地广泛应用,对实现工业生产自动化,推动工业生产的进一步发展将起着重要的作用。
一、设计要求及主要参数:1、运动简图:2、抓重:50N,100N,150N,200N,250N,300N3、自由度:4个4、臂部运动参数:5、腕部参数:6、定位方式:电位器(或接近开关等)设定,点位控制;7、手指夹持范围:棒料直径ø50~ø70mm ,长度450~1200mm8、驱动方式:液压(中、低压系统)9、定位精度:+/-3mm10、控制方式:PLC控制此次设计我们以5人为一小组的形式对机械手执行机械进行设计,本人负责的是手臂伸缩机械的设计,下文将就这部分进行说明。
机械手-机械原理课程设计说明书

机械手工作频率:20/min;升降 0.3kw,摆动 0.1kw,伸缩 0.1kw,夹持 0.2kw。
2执行机构的选择与比较§2-1 转角机构(实现平面转角030功能)方案一实现平面转角030的过程:电机带动不完全齿轮运动,不完全齿轮带动全齿轮运动,与全齿轮固结的四杆机构,使滚子在预先设计好形状的槽内运动,左右运动的极限位置恰好是30度。
机构评价:优点:因为槽的形状固定,所以能保证在一个行程内,机构的平面转角就是30度。
不完全齿轮的使用,为机械手在抓放物体时留下了工作时间。
缺点:由于四杆机构的运动被槽限制住,最短杆无法做周转运动,导致机构的回程要求齿轮的翻转,必须在前面加入变速箱改变速度方向。
方案二实现平面转角030的过程:皮带轮传动给蜗轮蜗杆从而使不完全齿轮,有间歇地带动完全齿轮转动,齿轮通过杆拉动齿条,由齿轮来回往复地带动固接杆转动030机构评价:优点:同样具有结构简单,传力较小运动灵活,造价低准确地实现转角030的要求,可以控制间歇实现循环功能。
缺点:磨损较严重,效率较低,齿轮尺寸过大加工难。
方案三30的过程:使用实现平面转角0槽轮实现平面转角30度,只要计算好槽轮的槽数,就能在主动圆盘转360度时,使从动轮转30度。
机构评价:优点:结构简单,外形尺寸小,机械效率高,并能平稳的间歇地进行转位。
缺点:传动存在柔性冲击,且是单向的间歇运动,同样要求变速箱改变运动方向。
方案的选择与比较:只有第二个方案能较好的实现对传动系统的功能要求在平面转动上能准确地控制在30度,制造简单方便。
§2-2 上升机构(实现上升100功能要求)方案一实现上升的过程:皮带轮传动,使蜗杆带动蜗轮,蜗轮和齿条配合。
通过控制蜗杆的半径,使转动一周后,使齿条上升100.机构评价:优点:蜗杆的轮齿是连续的螺旋尺,故传动平稳,啮合冲击小。
缺点:啮合齿轮间的相对滑动速度较大,摩擦磨损较大,传动效率较低,易出现发热现象,常用耐磨材料制作,成本高。
机械手课程设计

《机电系统》课程设计说明书课程设计任务书姓名班级学号设计题目简易型机械手的设计设计任务:(1)方案论证;在其基础上进行机械手的总体设计,并绘制总体布局图。
(2)驱动系统设计:根据机械手的特点,选用舍党的驱动方式,根据总体设计要求进行电机选型。
进行电机选型相关计算。
进行驱动系统零部件的选型和设计。
绘制驱动系统布局图。
(3)控制系统设计:确定机械手的控制方式并进行控制系统的控制与编程。
绘制控制系统布局图。
(4)传感与测试系统设计:进行控制与驱动系统的传感与测试系统的设计。
(5)机械本体设计:进行机械本体零部件设计,绘制总体和零件图。
设计工作量:(1)设计说明书一份(2)CAD图纸5张(3)文档整理排版指导教师设计时间2011年1月3日~2011年1月21日目录第1章绪论 (1)1.1机械手概述 (1)1.2机械手的设计目的 (3)1.3机械手的设计内容 (4)1.4机械手的分类及其在生产中的应用 (5)1.5机械手的应用意义 (8)1.6机械手的技术发展方向 (9)第2章设计方案的论证 (10)2.1机械手的总体设计 (10)2.2机械手腰座结构的设计 (12)2.3机械手手臂结构的设计 (14)2.4工业机器人腕部的结构 (16)2.5机械手末端执行器(手爪)的结构设计 (18)2.6机械手的机械传动机构的设计 (21)2.7机械手驱动系统的设计 (26)2.8机器人手臂的平衡机构设计 (33)第3章理论分析和设计计算 (34)3.1液压传动系统设计计算 (34)3.2电机选型有关参数计算 (43)第4章控制系统的设计 (47)4.1可编程控制器PLC (47)4.2 PLC的选型 (51)4.3机械手的工艺流程 (53)4.4 机械手的PLC控制系统程序 (57)第5章机械手本体设计 (59)5.1 机械手零部件设计 (59)5.2 机械手总成和零件图................................................ . (61)致谢 (62)参考文献 (63)第1章绪论1.1机械手的概述机械手主要由手部、运动机构和控制系统三大部分组成。
(完整word版)机械手臂课设说明书.

)机械手臂课设说明书.目录1引言 (1)2 PLC的简介 (2)2。
1 PLC的产生 (2)2.2 PLC的定义和特点 (2)2。
2。
1 PLC的定义 (2)2.2.2 PLC的特点 (2)2。
3可编程控制器的主要性能指标 (3)2。
4 PLC系统的组成 (4)2。
4.1 PLC的硬件结构 (4)2.4。
2 PLC的软件 (4)2。
5 PLC的应用领域 (4)3方案设计 (6)3。
1 主程序设计 (6)3。
2 公用程序设计 (7)3.3 自动程序设计 (8)3.4 手动程序设计 (9)3.5 自动回原点程序设计 (9)4心得体会 (11)参考文献 (12)附录1 (13)附录2 (17)1引言机械手是工业自动化领域中经常遇到的一种控制对象。
近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。
机械手广泛地应用与锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段.国内外都十分重视它的应用和发展。
可编程序控制器(PLC)是专为在工业环境下应用而设计的实时工业控制装置。
随着微电子技术、自动控制技术和计算机通信技术的飞速发展,PLC在硬件配置、软件编程、通讯联网功能以及模拟量控制等方面均取得了长足的进步,已经成为工厂自动化的标准配置之一[1]。
由于自动化可以节省大量的人力、物力等,而PLC也具有其他控制方式所不具有的特殊优越性,如通用性好、实用性强、硬件配套齐全、编程方法简单易学,因此工业领域中广泛应用PLC。
机械手在美国、加拿大等国家应用较多,如用果实采摘机械手来摘果实、装配生产线上应用智能机器人等。
我国自动化水平本身比较低,因此用PLC来控制的机械手还比较少。
2 PLC的简介2。
3自由度机械手设计说明书
目录一、确定机械手设计方案 (3)1.1、机械手基本形式和自由度数的选择 (3)1.2、机械手手部夹紧结构方案设计 (4)1.3、机械手的手臂(水平方向和垂直方向)结构方案设计 (4)1.4、机械手的腰座结构方案设计 (4)二、部分执行机构的理论分析和设计计算 (5)2.1、手爪执行机构的分析计算及相关尺寸的确定 (5)2.1.1、手抓的力学分析 (5)2.1.2、手爪夹紧力和驱动力的的计算 (7)2.1.3、液压缸主要参数的确定 (8)2.2、水平手臂的设计和计算 (10)2.3、机身升降机构的计算 (11)2.3.1、手臂偏重力矩的计算 (11)2.3.2、升降不自锁条件分析计算 (12)2.3.3、手臂做升降运动的液压缸驱动力的计算以及相关尺寸的确定 (13)2.4、驱动回转轴回转的电机选型有关参数计算 (15)2.4.1、有关参数的计算 (15)2.4.2、电机型号的选择 (16)2.5、液压传动系统设计 (17)2.5.1、确定液压系统基本方案 (17)2.5.2、拟定液压执行元件运动控制回路 (17)2.5.3、液压源系统的设计 (17)2.5.4、绘制液压系统图 (18)三、机械手控制系统的硬件设计 (18)3.1、机械手工艺过程与控制要求 (18)3.2、机械手的作业流程 (18)3.3、机械手操作面板布置 (19)3.4、控制器的选型 (19)3.5、控制系统原理分析 (20)3.6、I/O地址分配 (20)3.7、PLC原理接线图 (21)四、参考文献 (21)一、确定机械手设计方案1.1、机械手基本形式和自由度数的选择常见的工业机械手根据手臂的动作形态,按坐标形式大致可以分为以下4种: (1)直角坐标型机械手;(2)圆柱坐标型机械手; ( 3)球坐标(极坐标)型机械手; (4)多关节型机机械手。
其中圆柱坐标型机械手结构简单紧凑,定位精度较高,占地面积小。
因为设计要求搬运的棒料的质量达40KG,且直径达160MM,长度大约为250MM,考虑在满足系统工艺要求的前提下,尽量简化结构,以减小成本、提高可靠度。
装车机械手计算说明书

装车机械手计算说明书 Revised as of 23 November 2020机械设计课程设计设计计算说明书设计题目:装车机械手姓名:XXX学号:XXX班级:XXX指导教师:XXX设计时间:XXX目录一、设计任务书 (1)二、传动方案修改 (2)三、总体设计计算 (3)1. 电机型号选择2. 各级传动比分配3. 各轴的运动参数和动力参数计算(转速、功率、转矩)四、传动机构设计计算………………1. 齿轮传动(一):齿轮3与齿轮42. 齿轮传动(二):齿轮5与齿轮6五、轴系零件设计计算………………1. 轴的设计计算(一):轴22. 轴的设计计算(二):轴3六、润滑和密封方式的选择……………………………………七、箱体及附件的结构设计和选择……………………………八、设计总结……………………………………………………参考文献…………………………………………………………一、设计任务书设计题目:装车机械手设计一台装车机械手,将生产线上的纸箱搬运到货车车厢。
如图所示,已知纸箱箱体尺寸A×B×Cmm3,重M kg,其他条件及要求见表一。
要求搬运能力J件/小时,工作寿命6年,每年工作300天。
选择电动机型号,分配总传动比,计算各轴的转速、输入输出功率。
对各级传动进行设计计算,并对整机进行结构设计。
允许选用步进电机正反转工作。
纸H LC B机械手KA车箱设计过程及计算说明二、传动方案修改1. 系统运动方案图注一:1.零件1是带内螺纹的套筒,与齿轮2做成一体;2.零件2是带外螺纹的套筒,与零件1旋合;3.零件3是与上机箱连接的空心轴;注二:1.零件3与轴4之间用滑键连接,零件3可随轴4转动,并可沿其上下移动;2.零件2带动零件3上下运动;3.零件2与零件3、零件3与轴4之间皆用圆锥滚子轴承。
F=1000N V=sD=500mm L=500mmc)按弯扭复合强度条件计算(略)2、轴的设计计算(二):轴31).按扭矩初算轴径选用45(调质),硬度217~255HBS根据《机械设计》表15-3,取c=126d≥126 1/3mm=考虑有两个键槽,将直径增大10%-15%,则d=×(1+10%-15%)mm=选d=29mm2).的结构设计a)轴上零件的定位,固定和装配轴4的大齿轮上面由轴肩定位,下面用档油盘轴向固定,联接以平键作过渡配合固定,两轴承分别以套杯和大筒定位,则采用过渡配合固定。
机械手说明书
--前言机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。
它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。
机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。
本篇介绍的是用于物件装卸的机械手的设计,属圆柱坐标式机械手。
本篇根据设计机械手的一般程序,分八步详细地的介绍了用于物件装卸的机械手的设计的过程。
第一章设计任务书一.设计内容:1、机械手机构总体方案设计2、手架的结构设计3、液压、气压或电气系统设计机械手动作要求是:手架能作任何角度的伸缩和转动。
各动作由液压、气压驱动,电磁阀控制。
手架承重不小于10kg。
第二章设计任务分析以及总体方案机械手是一种模仿人手部分动作,按照预先设定的程序、轨迹或其它要求,实现抓取、搬运工件或者操纵工具的自动化装置。
一.机械手设计原则总体设计的任务:包括执行系统、驱动系统、控制系统的设计及参数计算,最后绘出草图。
总体设计后要进行各部件的强度、刚度、驱动力验算。
1、运动设计及确定主要要求手架能作任何角度的伸缩和转动2、驱动方式:液压、气压驱动该机械手是独立的自动化机械装置。
通用性高,机械手结构比较复杂。
手臂可作前后伸缩、上下升降和水平左右摆动三个动作,手臂可以绕Z轴转动360度4)按驱动方式分为联合驱动,电力驱动,液压驱动。
5)按臂力大小来说是中型机械手。
二、机械手分类1.按驱动方式分:液压式、气动式、机械式2.按适用范围分:专用机械手、通用机械手3.按运动轨迹控制方式分:点位控制、连续轨迹控制4.按臂部的运动形式分:直角坐标式、圆柱坐标式、球座坐标式、关节式三.机械手主要组成:机械手主要是由执行系统,驱动系统,控制系统三大部分组成。
1、执行部分执行系统是机械手的机械传动结构部分。
它包括手、手腕、手臂和机座等部件。
机械手说明书完整标准版

SHANDONGUNIVERSITYOFTECHNOLOGY课程设计说明书二维机械手,二号黑体学院:农业工程与食品科学学院专业:农业机械化及自动化学生姓名:指导教师:***2011 年7 月1目录第一章绪论································································错误!未定义书签。
1.1设计目的·······························································错误!未定义书签。
机床上下料机械手设计说明书
第1章绪论1。
1 选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分.把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强.当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械手的研究设计是非常有意义的。
1。
2 设计目的本设计通过对机械设计制造及其自动化专业大学本科四年的所学知识进行整合,完成一个特定功能、特殊要求的数控机床上下料机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。
目前,在国内很多工厂的生产线上数控机床装卸工件仍由人工完成,劳动强度大、生产效率低。
为了提高生产加工的工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代自动化大生产,针对具体生产工艺,利用机器人技术,设计用一台装卸机械手代替人工工作,以提高劳动生产率。
六自由度机械手设计说明书
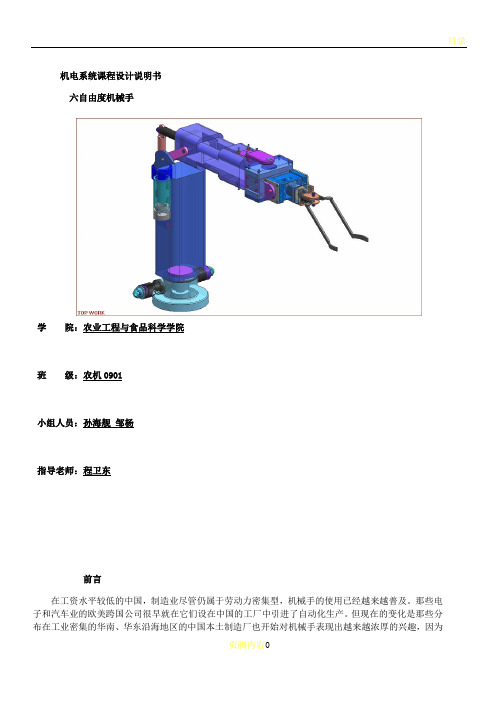
机电系统课程设计说明书六自由度机械手学院:农业工程与食品科学学院班级:农机0901小组人员:孙海舰邹杨指导老师:程卫东前言在工资水平较低的中国,制造业尽管仍属于劳动力密集型,机械手的使用已经越来越普及。
那些电子和汽车业的欧美跨国公司很早就在它们设在中国的工厂中引进了自动化生产。
但现在的变化是那些分布在工业密集的华南、华东沿海地区的中国本土制造厂也开始对机械手表现出越来越浓厚的兴趣,因为他们要面对工人流失率高,以及交货周期缩短带来的挑战。
机械手可以确保运转周期的一贯性,提高品质。
另外,让机械手取代普通工人从模具中取出零件不仅稳定,而且也更加安全。
同时,不断发展的模具技术也为机械手提供了更多的市场机会。
可见随着科技的进步,市场的发展,机械手的广泛应用已渐趋可能,在未来的制造业中,越来越多的机械手将被应用,越来越好的机械手将被创造,毫不夸张地说,机械手是人类是走向先进制造的一个标志,是人类走向现代化、高科技进步的一个象征。
因此如何设计出一个功能强大,结构稳定的机械手变成了迫在眉睫的问题。
前言 0一、方案设计 (2)二、结构设计 (2)三、电机的选择 (3)1.主回转轴电机的选用 (3)2、大臂摆动电机选用 (3)3、大臂转动电机选用 (4)4、小臂摆动电机的选择 (4)5、小臂转动电机选择 (5)四、功能分析 (5)五、基座旋转机构轴的设计及强度校核 (5)六、液压泵俯仰机构零件设计及强度校核 (9)七、左右摇摆机构设计及强度校核 (12)八、连腕部俯仰机构零件设计及强度校核 (15)九、旋转和夹紧的设计及强度校核 (21)1.机械手指部基座与回转体的螺栓连接 (21)2.机械手指部设计及夹紧力计算 (24)十、机构各自由度的连接过程 (25)十一、设计特色 (28)十二、心得体会 (28)一、方案设计方案一:机械手采用气动控制,气压传动,其优点:1)以空气为工作介质,来源放不安,且用后可直接排入大气而不污染环境。
三轴机械手设计说明书

目录前言 (2)第一章绪论 (3)1.1 引言 (3)1.2 工业机械手的含义 (4)1.3 选题背景与意义 (4)1.4 工业机械手的组成 (6)1.5 工业机械手的发展及国内外发展趋势 (7)第二章三轴伺服驱动机械手结构设计方案 (12)2.1 机械手的设计方法 (12)2.1.1 机械手的选择与分析 (12)2.1.2 直角坐标机械手的设计方法 (13)2.2 机械手的结构设计 (18)2.2.1 机械手的总体设计 (18)2.2.2 机械手的传动部件设计 (19)2.2.3 机械手的臂部设计 (20)2.3 三轴伺服驱动机械手机构的特点 (21)第三章工业机械手的运动系统分析 (22)3.1 工业机械手的运动系统分析 (22)3.1.1机械手的运动概述 (22)3.1.2 机械手的驱动方式 (24)第四章三轴伺服驱动机械手零件的设计 (33)4.1 伺服电机的选择 (33)4.2 减速机的选择 ..................错误!未定义书签。
4.3 齿轮齿条的选择 (35)4.4 导轨的选择 (43)第五章结论 (45)致谢.............................错误!未定义书签。
参考文献.. (46)前言进入21世纪后,FANUC公司开发成功了配备有视觉传感器和力觉传感器的智能机械手。
到现在已拥有可搬运质量从 2 公斤到1.2 吨的种类丰富的商品系列。
随后,FANUC公司又开发了运用这一智能机械手的长时间连续机械加工系统机械手单元。
在整个加工工序中加工作业本身使用数控机床进行自动化加工已经非常普遍了。
但是,附带作业,毛比如在加工中心的夹具上进行加工材料装卸的作业,以及去毛刺边,清洗等作业中的很多部分,现在还是依靠人工来完成。
机械手单元使用智能机械手,不但实现了这些作业的自动化,而且在世界上最早实现了。
小时的长时间连续加工,现在在FANUC公司的工厂共运转着13 套这样的机械手单元。
(整理)四自由度圆柱坐标机械手毕业设计说明书精选全文
精选全文完整版(可编辑修改)目次1 绪论 (1)1.1 工业机械手的概述 (1)1.2 工业机械手在生产中的应用 (1)1.3 机械手的组成概述 (2)1.4 工业机械手的发展趋势 (3)2 总体设计方案 (4)2.1 设计题目 (4)2.2 初始参数与设计要求 (4)2.3 方案拟定 (5)3 机械手手部设计计算 (6)3.1 手部设计基本要求 (6)3.2 手部力学分析 (7)3.3 夹紧力及驱动力的计算 (8)3.4 机械手手抓夹持精度的分析计算 (9)4 机械手腕部设计计算 (11)4.1 腕部设计基本要求 (11)4.2 腕部结构的选择 (11)4.3 腕部回转力矩的计算 (12)5 机械手臂部设计计算 (16)5.1 机械手臂部设计的基本要求 (16)5.2 手臂的典型机构及结构的选择 (16)5.3 手臂伸缩驱动力计算 (17)5.4 手臂伸缩油缸结构的确定 (19)5.5 油缸端盖的连接方式及强度计算 (21)-------------6 机身设计与计算 (23)6.1 机身的整体设计 (23)6.2 机身回转机构的设计计算 (25)6.3 机身升降机构的设计计算 (28)7 液压驱动系统的计算 (31)7.1 绘制液压系统的工况图 (31)7.2 计算和选择液压元件 (36)总结 (38)致谢 (38)参考资料 (39)1.3 机械手的组成工业机械手由执行机构、驱动机构和控制机构三部分组成。
1.3.1 执行机构(1) 手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。
手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于吸冷的,光滑表面的零件或薄板零件)和电磁吸盘。
传力机构形式教多,常用的有:滑槽杠杆式、连杆杠杆式、斜槭杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。
(2) 腕部是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。
机械手说明书
三自由度直角坐标机械手设计作者姓名汪增帅专业机械设计制造及其自动化指导教师付秀琢专业技术职务目录摘要 (1)第一章概述 (2)1.1机械手概述 (2)1.2机械手历史和现状 (4)1.3机械手发展趋势 (6)第二章总体设计 (8)2.1机械手组成及各部分关系 (8)2.2总体方案拟定 (9)2.3 驱动方式的选择 (11)第三章机械系统设计 (13)3.1机械手的结构设计 (13)3.2传动结构的设计 (15)3.3导轨的设计 (20)3.4轴承的选择 (21)3.5电机的选择 (22)第四章总结 (25)致 (25)参考文献 (26)摘要在工业上,自动控制系统有着广泛的应用,如工业自动化机床控制,计算机系统,机械手等。
而工业机械手是相对较新的电子设备,它正开始改变现代化工业面貌。
本设计为三自由度直角坐标型工业机械手,其工作方向为三个直线方向。
在控制器的作用下,它执行将工件从一个地方搬到另一个地方这一简单的动作,本文是对整个设计工作较全面的介绍和总结。
关键词:三自由度直角坐标工业机械手ABSTRACTIt is starting to change the modern industrial landscape. The design for the industrial robot of three degrees of freedom Cartesian coordinate its work direction for the three linear directions. The role of the controller, which performs the workpiece moved from one place to another place of this simple action, This is the entire design more comprehensive introduction and summary.Keywords:three degrees of freedom; rectangular coordinates; industrial robot第一章概述1.1机械手概述在现代工业中,生产过程的机械化、自动化已成为突出的主题。
液压机械手臂设计完整说明书

编号无锡太湖学院毕业设计(论文)题目:液压机械手的设计信机系机械工程及自动化专业学号:学生姓名:指导教师:(职称:副教授)2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)液压机械手的设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目液压机械手的设计2、专题二、课题来源及选题依据本课题是设计基于液压系统的机械手。
液压机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或者握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通过机械手进行液压传动原理设计,实现机械手代替人力进行工作。
机械工业是国民的装备部,是为国民竞技提供装备和为人民生活提供耐用消费品的产业。
机械工业的规模和技术水品是衡量国家经济实力和科学技术水平的重要标志。
三、本设计(论文或其他)应达到的要求:1、收集相关资料,分析自己完成本课题还存在哪些方面的困难。
2、选定自己适合的制图软件,对选定的工具进行学习和具体实践。
3、对驱动油路进行仔细的研究,了解液压驱动原理,绘制油路图。
4、机械结构的分析,根据要求设计出合理轻便的机械手。
5、模拟调试后对整个液压机械手进行完善。
四、接受任务学生:班姓名五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日液压机械手是模仿人的手部动作,按照给定的程序、轨迹通过液压系统实现抓取和搬运操作的自动装置。
机械手说明书
前言近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
例如:在机床加工,装配作业,劳动条件差,单调重复易于疲劳的工作环境以及在危险场合下工作等。
随着工业技术的发展,工业机器人与机械手的应用范围不断扩大,其技术性能也在不断提高。
在国内,应用于生产实际的工业机器人特别是示教再现性机器人不断增多,而且计算机控制的也有所应用。
在国外应用于生产实际的工业机器人多为示教再现型机器人,而且计算机控制的工业机器人占有相当比例。
带有“触觉”,“视觉”等感觉的“智能机器人”正处于研制开发阶段。
带有一定智能的工业机器人是工业机器人技术的发展方向。
第1章液压机械手总体方案设计机械手总体设计方案拟定机械手是能够模仿人手的部分动作,按照给定的程序,轨迹和要求,实现自动抓取、搬运或操作动作的自动化机械装置。
在工业中应用的机械手称为“工业机械手”。
能够配合主机完成辅助性的工作,随着工业技术的发展,机械手能够独立地按照程序,自动重复操作。
根据课题的要求,机械手需具备上料,翻转和转位等功能,并按照自动线的统一生产节拍和生产纲领完成以上动作。
设计可参考以下多种设计方案:采用直角坐标式,自动线呈直线布置,机械手在空中行走,按照顺序完成上料、翻转、转位等功能。
这种方案结构简单,自由度少,易于配线,但需要架空行走,油液站不能固定,使得设计复杂程度增加,运动质量增大。
图直角坐标式布局示意图机身采用立柱式,机械手侧面行走,按照顺序完成上料、翻转、转位的功能,自动线仍成直线布置。
这种方案可以集中设计液压站,易于实现电气,油路定点连接,但是占地面积大,手臂悬伸量较大。
五关节教程机械手——说明书

基于PLC的五轴教学机械手设计摘要本毕业设计要求学生掌握机械手或工业机械手的结构及工作原理,设计一关节型五轴教学用机械人的控制系统。
整个设计以控制为主,结构设计可参考同类机械人。
机械人共有五个关节动作和一个抓手动作,使用五个步进电机分别控制五个关节的动作,抓手的抓物动作由气阀控制。
控制箱部分由电源、可编程控制器、步进电机驱动模块及相应的按钮组成,具有手动和自动控制功能。
所设计机械人可进行简单机械手模拟控制的实验。
主要任务包括机械手总体设计、型式选择、机械手的I/O配置、设计机械手的流程图、设计机械手的梯形图、编制机械手的语句表、选择传感器等元件及设计系统图。
关键词:教学机械手,五自由度,步进电机,气阀控制,PLCPLC-based teaching of five-axismanipulator designAbstractDesign requirements of the graduate students to master the structureand working principle of manipulator or industrial robot , design acontrol system of the five-axis teaching type robot. The whole design isbase on control system.structural design can refer to the same robot. There are five robot joint action and a handle movement, the movement offive joints were controlled by five separate stepper motor , the grasping movements were controlled by the valve. Control box in part by the power supply, programmable controller, stepper motor drive module and the corresponding button of the function with manual and automatic control. Designed robot manipulator can be simple analog control experiment.The main tasks include robot design, type selection, the robot I /O configuration, the flow chart of robot design, the ladder diagram ofrobot design,the STL of robot design , select the design of sensor components and systems.Keywords: Teaching manipulator,Five degrees of freedom,Stepping Motor,Valve control, PLC目录绪论 (1)第一章机械手的总体设计 (3)1.1运动设计要求 (3)1.2驱动系统的选择 (3)1.3教学型五关节机械手机构简图 (3)第二章气动机械手的气缸设计 (5)2.1基座及连杆的结构 (5)2.1.1基座的结构 (5)2.1.2大臂的结构 (6)2.1.3小臂的结构 62.1.4手腕的结构72.2机械手手部的设计 (8)2.2.1根据课程选择手部类型 (8)2.2.2手部的设计 (8)2.3机械手的驱动与转动 (10)2.3.1手臂部分的传动方案 (11)2.3.2手指驱动缸的设计和选定 (14)第三章机械手的控制系统设计 (19)3.1步进电机控制系统的设计 (19)3.1.1PLC对步进电机的控制 (19)3.1.2脉冲分配器的选择 (20)3.1.3功率放大电路的设计 (22)3.2气动部分控制系统的设计 (23)3.2.1气动系统的介绍 (24)3.2.2气动系统的分类253.2.3气动控制方式253.2.4装置的技术要求273.2.5控制方式的选择273.2.6气动回路的设计273.2.7传感器的选择33 第四章机械手PLC程序设计 (37)4.1PLC概述 (37)4.2输入和输出点分配表 (37)4.3PLC软件程序 (39)4.3.1 PLC 梯形图 (39)4.3.2 PLC 语句表 (43)4.3.3机械手控制面板 (45)参考文献 (46)绪论一、机械手的研究现状热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计设计题目棒料抓装机械手的设计学生姓名学号专业班级指导教师院系名称目录中文摘要 (3)英文摘要 (4)第一章绪论 (5)1.1 工业机械手 (5)1.1.1 工业机械手概述 (5)1.1.2 选题背景 (6)1.1.3 设计目的 (6)1.2 机械手的组成和分类 (7)1.2.1机械手的组成 (7)1.2.2机械手的分类 (10)1.3 国内外发展状况 (12)1.4 课题的主要要求 (13)第二章手部结构 (14)2.1 手部结构设计 (14)2.1.1概述 (14)2.2手部计算 (16)2.2.1 驱动力的计算 (16)2.2.2夹紧缸驱动力计算 (18)2.3 两支点回转式钳爪的定位误差的分析 (18)第三章腕部结构 (19)3.1腕部的结构设计 (19)3.1.1概述 (19)3.1.2 腕部的结构形式 (19)3.2手腕驱动力矩的计算 (20)第四章臂部的结构 (21)4.1 臂部设计的基本要求 (22)4.2 手臂的典型机构以及结构的选择 (23)4.2.1 手臂的典型运动机构 (23)4.2.2 手臂运动机构的选择 (23)4.3 手臂直线运动的驱动力计算 (23)4.3.1 手臂摩擦力的分析与计算 (23)4.3.2 手臂惯性力的计算 (25)4.3.3 密封装置的摩擦阻力 (25)4.4 液压缸工作压力和结构的确定 (26)第五章机身的设计计算 (29)5.1 机身的整体设计 (29)5.2 机身回转机构的设计计算 (30)5.3 机身升降机构的计算 (33)5.3.1 手臂偏重力矩的计算 (33)5.3.2 升降不自锁条件分析计算 (34)5.3.3 手臂做升降运动的液压缸驱动力的计算 (34)5.3.4 油缸结构尺寸的确定 (35)第六章液压系统 (37)6.1液压系统的设计 (37)6.1.1液压系统简介 (37)6.1.2液压系统的组成 (37)6.2机械手液压系统的控制回路 (37)6.2.1 压力控制回路 (37)6.2.2 速度控制回路 (38)6.2.3方向控制回路 (38)6.3 机械手的液压传动系统 (39)6.3.1上料机械手的动作顺序 (39)6.3.2自动上料机械手液压系统原理介绍 (39)6.4机械手液压系统的简单计算 (41)6.4.1 双作用单杆活塞油缸 (42)6.4.2油泵的选择 (45)6.4.3 确定油泵电动机功率N (45)第七章PLC控制回路的设计 (46)7.1电磁铁动作顺序 (47)7.2 根据机械手的动作顺序表 (48)7.3 PLC与现场器件的实际连接图 (49)7.4 梯形图 (50)7.5指令程序 (52)结论 (56)致谢 (57)参考文献: (58)棒料抓装机械手的设计摘要:当今社会信息化、科技化时代到来,机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,可以通过编程控制及检测反馈技术的成熟实现无人化操作,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
机械手的发展可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
关键词:减轻劳动强度、提高生产率、适应恶劣环境、自动化、产品质量高。
THE DESIGN OF MANIPULATOR FOR THE CLAVATEMATERAL GRABBED THE DEVICEAbstract:With the development of information and science & technology, robot technology has been a comprehensive subject which includes computing,control theory, sensor technology, AIT (artificial intelligencetechnology) and bionics. Robot can be controlled by PLC with feedbackswhich can achieve unmanned operation. The research of robot technologyis active with wide applications. The applied ratio of robot technologyis the most important symbol of the level of industrial automationstately. Robot is not just a replacement of human labor, but greatmechanical & electronic device and a compound of human and machine.Robot has the fast reaction and judge to environment and can work longwith high accuracy. To some extent, it is the evolution product oftraditional machine and has been the indispensable automatic machineof advanced manufacturing field. Mechanical arm imitates some of humanactions with a set program and track to achieve automatic grab,operation or transportation of goods. The mechanical arm could relievehuman labor and improve product quality with safety, especially inmal-condition of high-temperature, high-pressure, low temperature,low-pressure, dusty or explosive, the application of robot is moresignificant.Key Words:relieve human labor, improve product efficiency,adapt to mal-conditions, automation, high quality第一章绪论1.1 工业机械手1.1.1 工业机械手概述工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。
机器人应用情况,是一个国家工业自动化水平的重要标志。
机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设各,也是先进制造技术领域不可缺少的自动化设备.机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用.机械手的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用机械手。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
1.1.2 选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能代替人类完成危险、重复枯燥的工作,减轻人类劳动强度,提高劳动生产力。
机械手越来越广泛的得到了应用,在机械行业中它可用于零部件组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更普遍。
目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。
把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,它适应于中、小批量生产,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。
当工件变更时,柔性生产系统很容易改变,有利于企业不断更新适销对路的品种,提高产品质量,更好地适应市场竞争的需要。
而目前我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
因此,进行机械手的研究设计是非常有意义的。
1.1.3 设计目的本设计通过对机械设计制造及其自动化专业夜大2.5年的所学知识进行整合,完成一个通用形式的普通圆棒料搬运的机械手的设计,能够比较好地体现机械设计制造及其自动化专业毕业生的理论研究水平,实践动手能力以及专业精神和态度,具有较强的针对性和明确的实施目标,能够实现理论和实践的有机结合。