四轴飞行器:让PCB板飞!
四轴飞行器:让PCB板飞!

四轴飞行器:让PCB板飞!我们在制作一个非常袖珍的四轴飞行器,就用PCB作为承力结构。
第一个版本被命名为疯狂直升机。
它的主要特点有:•STM32 Cortex-M3 CPU•3轴加速度计•1轴/2轴陀螺仪•Nordic 2.4GHz 射频通信芯片•电动机,螺旋桨和银辉(Silverlit)X翼模型飞机的电池这架直升机可以从电脑上通过USB无线适配器遥控。
我们制作了三架样品(每个成员各一架),并完成了大多数的固件程序。
为了达到稳定飞行的目的,还需要解决一些控制上的问题,以及完成电脑上的控制程序模块。
更多的信息和实际飞行视频会在稍后公布:)第一个飞行视频这是直升机的第一段飞行影像。
控制系统工作的很棒,但是它仍然过于依赖操纵者的敏捷(见视频的结尾部分)。
这架直升机是通过PC机上运行的Python程序控制的,我们实际上用一个游戏机的蓝牙手柄来操纵它。
疯狂直升机四轴飞行器详述像承诺过的那样,我们要在这里公布疯狂直升机(也是我们第一架四轴飞行器)的更多信息。
该系统的主要架构如下:疯狂直升机的高层次系统图。
直升机本身是围绕CPU组织起来的。
CPU的任务是读取物理传感器(陀螺仪和加速度计)的测量结果,给出控制信号控制电机,让直升机保持稳定。
通过一个控制反馈回路,CPU每秒能够对电机发送250次调节转速的指令。
无线通信的带宽需求很低,仅仅需要发送操作命令和接受遥测数据。
CPU上运行的程序可以通过无线通信更新。
控制和遥测程序在电脑上运行,控制程序从手柄读取输入,然后向直升机发送命令。
我们也有调节直升机上控制参数的程序模块,并且会记录下传感器的测量结果,方便调整控制回路。
所有这些开发工作在Windows或linux系统上完成。
事实上有三个人同时在这个项目上工作,两个人在Linux上工作,剩下一个人主要使用Windows。
利用自由/开源软件(FLOSS,Free/Libre and Open Source Software)许可对提高工作效率非常有帮助。
自制四轴飞行器之路

自制四轴飞行器之路
四轴飞行器,又称四旋翼飞行器,简称四轴、四旋翼。
四轴飞行器的四个螺旋桨与电机直接相连,通过改变电机转速获得旋转机身的力,从而调整自身姿态。
四轴的叶片转速极高,有一定的危险性,一般不能在室内飞,特别是在调试过程中更加不稳定,轻则炸鸡撞坏物品,重则伤到人。
我做四轴的主要目的是为了学习飞控算法,这个过程肯定少不了调试,为了安全,我选择做一个小一点的,手掌那么大的四轴,叶片的威力比较小,价格也便宜,即使摔坏也不心疼。
这种小四轴一般采用PCB做机架,用720空心杯电机代替无刷电机,用MOS管代替电调,电池采用3.7v锂聚合物电池(尺寸跟手机电池差不多,但是放电电流要大很多),遥控用2.4G无线模块,或者用蓝牙连接手机,成本100左右,续航时间大概6-7分钟,遥控距离在10米以内。
选择零件
四轴上最重要的就是飞控,所以第一步:选择飞控。
市面上有许多现成飞控,也可以自己用电子元件做一个分控。
有很多有名的开源飞控,例如KK,QQ,匿名,MultiWii/MWC,APM/PIX等。
KK、QQ飞控功能较少,只有基本的四轴飞行功能,甚至不支持GPS。
匿名飞控是国内新出现的飞控,功能比以上两个要多,价格也要贵很多。
MultiWii/MWC飞控是基于arduino的,支持GPS,能路线规划,在线调试。
APM也是基于arduino的,功能更为齐全,硬件也更为复杂,飞控中有两块单片机,分别执行不同功能。
APM已将arduino的性能开发到极限,于是有了升级版PIX,从arduino 转到了STM32,处理速度提升了10倍,同样用了两块不同型号的STM32协同运作,是目前已知的最好的开源飞控。
四轴飞行器报告
四轴飞行器报告1. 前言四轴飞行器是一种无人机,由四个电动机驱动,具有稳定飞行的能力。
它在军事、民用及娱乐领域都有广泛的应用。
本报告将对四轴飞行器的结构、工作原理以及应用进行详细介绍。
2. 结构四轴飞行器主要由以下部件组成:•机架:提供了支撑和连接其他部件的框架结构,通常是以轻质材料如碳纤维制成。
•电动机:驱动飞行器飞行的关键部件,通常使用直流无刷电机。
•螺旋桨:由电动机驱动的旋转桨叶,用于产生升力和推力。
•电调:控制电动机的转速和方向,从而控制飞行器的姿态。
•飞控系统:负责接收和处理来自传感器的数据,计算飞行器的姿态和控制指令。
•电池:提供能量给电动机和其他电子设备。
3. 工作原理四轴飞行器的飞行原理基于牛顿第二定律。
通过调整四个电动机的转速和方向,可以控制飞行器的姿态和运动。
飞行器的姿态包括横滚、俯仰和偏航。
通过增加相对转速,可以产生横滚和俯仰的力矩,从而使飞行器向相应方向倾斜。
飞行器倾斜后,电动机产生的升力也会有所改变,使得飞行器能够前进、后退或悬停。
飞行器的稳定性是通过飞控系统来保证的。
飞控系统通过接收来自加速度计、陀螺仪和磁力计等传感器的数据,计算飞行器的姿态和运动状态,并根据用户的控制输入调整电动机的转速和方向,以保持飞行器的稳定。
4. 应用四轴飞行器在军事、民用及娱乐领域都有广泛的应用。
在军事领域,四轴飞行器可以用于侦查、监视和目标跟踪。
由于其小型化、高机动性和隐蔽性,可以在不可接近的区域执行任务,提供重要的情报支持。
在民用领域,四轴飞行器可以用于航拍、物流和巡检等任务。
航拍业务能够提供高质量的航空影像,广泛用于地理信息和城市规划等领域。
同时,四轴飞行器还可以用于运送货物,解决最后一公里的配送问题。
此外,四轴飞行器还可以用于巡检任务,如电力线路、管道和建筑物的巡检,提高作业效率和安全性。
在娱乐领域,四轴飞行器常被用作遥控飞行器,供爱好者进行操控和竞赛。
爱好者可以通过多种方式定制飞行器的外观和性能,提升飞行器的性能和飞行体验。
四轴飞行器的工作原理
四轴飞行器的工作原理
四轴飞行器是一种无人机,它由四个电动马达驱动的旋翼组件组成。
这些旋翼组件位于飞行器的四个角落,通过不同的旋翼速度和倾斜角度来实现飞行和悬停。
电调控制
每个电动马达通过电调来控制旋翼的转速和旋翼的倾斜角。
电调接收飞行控制器发送的指令,然后控制马达的速度以及旋翼的倾斜角度,从而使飞行器实现不同方向的飞行和悬停。
加速度计和陀螺仪
四轴飞行器还配备了加速度计和陀螺仪,这些传感器用来感知飞行器的姿态和位置。
加速度计测量飞行器的加速度,陀螺仪测量飞行器的旋转速度。
这些数据被发送到飞行控制器,用来调整电调的输出,从而维持飞行器的稳定飞行和悬停。
遥控器
飞行器的飞行可以通过遥控器来实现,飞行员通过遥控器发送指令给飞行器,从而控制飞行器的飞行方向、速度和高度。
遥控器通过无线信号和接收器连接到飞行控制器,将飞行员的指令转化为电调的控制参数。
姿态控制
四轴飞行器的飞行姿态通过电调控制四个旋翼的转速和倾斜角来实现。
在飞行过程中,加速度计和陀螺仪的反馈数据被飞行控制器实时处理,以保持飞行器的平稳飞行状态。
姿态控制是四轴飞行器能够实现精确悬停和各种飞行动作的基础。
总结
四轴飞行器的工作原理主要依靠电调、加速度计和陀螺仪、遥控器以及姿态控制系统。
通过这些关键组件的协同作用,四轴飞行器能够实现稳定的飞行和悬停,成为现代航空领域的重要应用之一。
基于STM32控制的微型四轴飞行器
西华大学610039摘要:在对我很感兴趣的项目微型四轴飞行器进行了功能描述的基础上展开了对系统深入研究的方案设计。
该系统(装置)主要由飞控,遥控,蓝牙或WIFI模块,通信模块等组成。
飞控是由stm32f103作为主控,采用MPU6050作为惯性测量单元。
遥控是由arduino作为主控。
通信运用2.4G无线模块。
在AD环境中完成对飞控的的设计。
在keil 5中完成软件的设计。
然后,通过proteus软件完成飞控的模块的仿真与调试。
最后,分析了项目的计划完成情况。
关键词:四轴飞行器控制 stm32 通信设计引言随着社会的发展和科技的进步,我们迎来了新的时代。
在这个高速发展时代,所有的物品都在日新月异的变化。
我们小时候的纸飞机玩具变成了现在的遥控飞机,其中的四轴飞行器备受大众喜欢。
但是四轴飞行器的用处还有多,如林业,侦察,航拍,运输,娱乐观赏等领域,目前热门的航拍就是基于稳定四轴及云台搭建的平台实现,然后其他邻域应用还有相当的潜力。
四轴飞行器将会是很有潜力和未来需求的,代替人类运输,派遣去危险的地方拍摄,或者是交通,个人飞行器等等。
所以四轴飞行器以后一定可以成为主流产品,在生活的方方面面都可能会用到。
1项目1.1 项目描述近年来,国内科技领域对四轴飞行器的研究如火如荼,相关技术得到了迅速的发展。
随着信息化时代的蓬勃发展, 科学技术不断更新, 飞行器被广泛的应用在军事侦查、航拍以及民用快递运输等诸多行业。
四轴飞行器结构简单,操作灵活,单位体积内可提供巨大的升力,适合在狭窄环境中飞行,携带各种电子设备可执行各种任务,例如军事侦察、定位跟踪、农田监测等,在军事、民用等领域均有广泛的应用和广阔的前景。
本项目设计了一种基于STM32的微型四轴飞行器控制系统,以STM32单片机为主控制器,MPU6050为惯性测量单元模块核心,3.7V锂电池供电,通过蓝牙模块或wifi模块实现在手机App上来控制飞行器,或者通过自制遥控器来控制。
四轴飞行器原理教程解读
四轴飞行器原理教程解读首先,四轴飞行器的结构主要包括四个电动机、四个螺旋桨、飞行控制器、陀螺仪、加速度计和电池等。
其中,电动机通过螺旋桨产生的推力可以使飞行器进行垂直起降和悬停,而飞行控制器通过传感器获取的数据来调节电机的转速,从而控制飞行器的飞行方向和姿态。
四轴飞行器的基本原理是通过调整每个电机的转速来产生合适的推力,从而实现飞行姿态的控制。
当四个电机的转速相等时,飞行器可以保持水平悬停状态,而当四个电机的转速不相等时,飞行器会产生偏转力矩,从而改变飞行器的姿态。
为了实现对飞行器的准确控制,飞行控制器通过陀螺仪和加速度计来获取飞行器的角速度和加速度信息。
陀螺仪可以感知飞行器的转动状态,而加速度计可以感知飞行器的加速度。
通过对这些数据的处理和分析,飞行控制器可以实时调整电机的转速,从而实现对飞行器的稳定控制。
在实际操作中,飞行控制器可以根据用户的输入来决定飞行器的飞行模式。
例如,用户可以通过手持遥控器来控制飞行器的上升、下降、前进、后退、左转和右转等动作。
在用户发送指令后,飞行控制器会根据指令对电机的转速进行调整,并根据陀螺仪和加速度计的数据进行实时的飞行姿态控制。
此外,飞行控制器还可以实现一些高级功能,例如定高飞行、定点悬停和自动返航等。
定高飞行功能可以让飞行器自动保持特定的飞行高度,定点悬停功能可以让飞行器在空中保持固定的位置,而自动返航功能可以让飞行器在失控或电池低电量时自动返回起飞点。
总结起来,四轴飞行器的原理是通过调整电机的转速来实现飞行器的姿态控制,而飞行控制器则负责获取传感器数据,并根据用户的指令实现对飞行器的控制。
通过合理的设计和调整,四轴飞行器可以实现稳定的飞行和精确的操控,成为一种越来越受欢迎的飞行器。
四旋翼飞行器控制系统硬件电路设计
四旋翼飞行器控制系统硬件电路设计首先,在硬件电路设计中,关键是选择合适的传感器。
常用的传感器包括加速度计、陀螺仪和磁力计等。
加速度计用于测量飞行器的线性加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量飞行器的方向。
这些传感器需要与处理器进行接口连接,并能够提供准确的数据。
因此,在硬件电路设计中,需要选取高性能的传感器,同时设计稳定可靠的电路板。
其次,处理器是控制系统的核心。
处理器的选择应综合考虑性能、功耗和成本等因素。
常用的处理器有单片机和微处理器。
单片机适用于简单的控制任务,如姿态控制和飞行模式切换等。
而微处理器适用于复杂的控制任务,如路线规划和数据处理等。
在硬件电路设计中,处理器需要与传感器和电调进行接口连接,并能够高效地处理控制指令。
此外,处理器还需要具备足够的计算能力和存储空间,以便实现飞行控制算法和数据记录功能。
电调是控制电机转速的关键组件。
通常,四旋翼飞行器需要四个电调以控制四个电机的转速。
电调需要接收处理器发送的PWM信号,并将其转换为适当的电机转速。
在硬件电路设计中,电调需要具备快速响应的能力,并能够输出稳定的PWM信号。
此外,电调还需要有适当的保护机制,以避免过载和短路等故障。
最后,电机是驱动飞行器旋转的关键组件。
电机的选择应综合考虑功率和效率等因素。
常用的电机有无刷电机和有刷电机。
无刷电机具有高效率和长寿命等优点,因此在硬件电路设计中通常选择无刷电机。
电机需要与电调进行接口连接,并能够输出适当的推力。
此外,电机还需要具备足够的扭矩和转速范围,以应对不同的飞行任务。
总之,四旋翼飞行器控制系统硬件电路设计涉及多个组件的选择和接口设计等方面。
在设计过程中,需要综合考虑传感器、处理器、电调和电机等因素,以实现飞行器的控制能力和飞行稳定性。
四 轴 飞 行 器
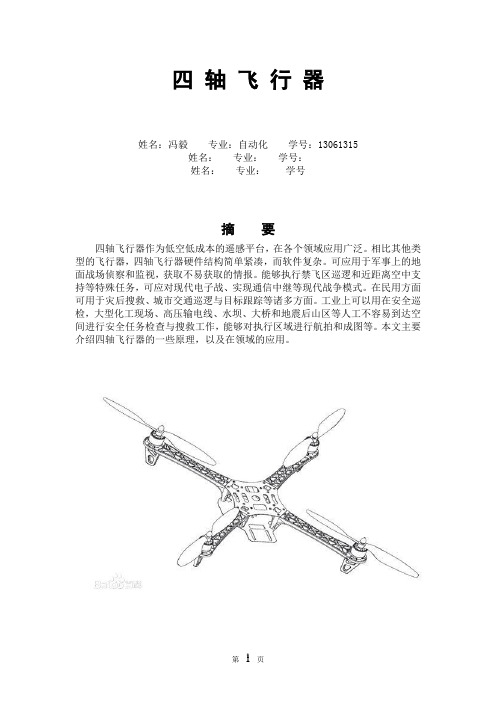
四轴飞行器姓名:冯毅专业:自动化学号:13061315姓名:专业:学号:姓名:专业:学号摘要四轴飞行器作为低空低成本的遥感平台,在各个领域应用广泛。
相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。
可应用于军事上的地面战场侦察和监视,获取不易获取的情报。
能够执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在安全巡检,大型化工现场、高压输电线、水坝、大桥和地震后山区等人工不容易到达空间进行安全任务检查与搜救工作,能够对执行区域进行航拍和成图等。
本文主要介绍四轴飞行器的一些原理,以及在领域的应用。
目录1.引言 (2)2.四轴飞行器的国内外情况 (2)2.1.四轴飞行器的主要生产公司 (3)3.飞行器的结构特性 (4)3.1.飞行器的构成 (4)3.1.1.硬件构成 (5)3.1.2.机械构成 (5)3.1.3.电气构成 (5)4.四轴飞行器的运动原理 (5)5.四轴飞行器的应用 (9)5.1.Dronenet应用 (10)5.2.Follow Me Box 的应用 (10)6.附录 (11)1.引言四轴飞行器最开始是由军方研发的一种新式飞行器。
随着MEMS传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。
到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等,已经成为重要的遥感平台。
以农业调查为例,传统的调查方式为到现场抽样调查或用航空航天遥感。
抽样的方式工作量大,而且准确性受主观因素影响;而遥感的方式可以大范围同时调查,时效性和准确性都有保证,但只能得到大型作物的宏观的指标,而且成本很高。
不连续的地块、小种作物等很难用上遥感调查。
因此,低空低成本遥感技术显得相当重要,而四轴飞行器正符合低空低成本遥感平台的要求。
一起来做四轴飞行器(下)

一起来做四轴飞行器(下)作者:来源:《中学科技》2012年第12期上一期,我们介绍了四轴飞行器的机架制作和动力部分,本期将继续介绍飞行器的控制部分以及具体的调试和飞行。
四、控制部分1. 控制部分是最复杂的部分,首先把KK控制板安装到胶木板上。
需要注意安装的方向,一旦我们将前方也就是KK控制板上画箭头的方向确定之后,所有的工作都将要围绕这个方向进行。
2. 图15是KK控制板中程序控制所需要电机旋转的方向,我们需要在电机边上标上电机的编号和旋转的方向。
同时也在中心板上标明KK控制板的安装方向,以免以后出错。
整个KK控制板从遥控接收器接收信号,再将信号经过计算后,发往每个电调控制电机的转速。
在第10期中我们提到的PID算法就由这块电路板中间的处理器完成。
3. 如图16,先用杜邦线把遥控器的信号接到KK板上的遥控器信号输入端,这里只连接了信号,而没有连接电源,电源问题我们稍后解决。
4. 在连接电调之前,需要准备一个电路元件作为转接板(图17)。
这是用通用板和杜邦线制作的,比较简单,电路图参照图18。
图18中每一列插一个电调的信号线,最上方是负极位置,最下方是信号线位置。
可以看出,这块电路板的作用是将所有电调的地信号都连在了一起,同时在左侧和右侧将最靠边的两个电调的电源分别引了两根线出来,而下方的信号线位置分别引了四条线出来。
具体接法如下:将转接板旋转90度,让信号线向右,地线在左,从上到下依次编号为1、2、3、4,与之前编过号的电机相对应。
对应的电调也就是1~4号,分别接到转接板上,注意信号线的方向,往往电调信号线上颜色比较深的线是地线。
从图18中可以看出,信号线被分为4条单独线输出,这里就可以直接接到KK控制板连接电调的插针上,在KK控制板上靠近芯片一侧的是信号线。
经过连线后,遥控器的控制信号就能通过KK控制板传到4个电调上。
接下来我们考虑供电问题。
通常,固定翼飞机或是直升机都只有一个电机,电池接在电调上,电调将电直接送往接收机,同时从接收机获取控制信号。
四轴飞行器原理教程
四轴飞行器原理教程
首先是飞行器的结构。
四轴飞行器主要包括机身、旋翼、电动马达和
电池等组成部分。
机身通常采用轻质材料制作,以减轻整机重量。
旋翼通
过电动马达旋转产生托力和推力,其数量为四个,分别位于飞行器的四个
不同位置。
电动马达通过电池提供动力,使旋翼可以旋转产生推力。
其次是控制系统。
四轴飞行器的控制系统主要包括惯性测量装置(IMU)和飞行控制器(Flight Controller)。
IMU利用陀螺仪、加速度
计和磁力计等传感器获取飞行器的姿态、加速度和方向等信息。
飞行控制
器根据IMU传来的数据,通过算法进行数据处理和控制计算,最后生成控
制信号给电动马达,实现对飞行器的控制。
稳定性控制是四轴飞行器的关键,它主要通过控制旋翼的推力和转速
来实现飞行器的平衡。
一般来说,四轴飞行器的稳定性控制有两种方式:
姿态控制和高度控制。
姿态控制主要通过调整四个电动马达的推力和转速,使飞行器的姿态保持平衡。
高度控制则通过调整总推力来控制飞行器的升降。
综上所述,四轴飞行器的原理主要包括飞行器结构、控制系统、稳定
性控制和飞行控制。
飞行器通过调整旋翼的推力和转动速度来实现空中平
衡和定向飞行,通过飞行控制器的计算,实现对飞行器的控制。
四轴飞行
器具备垂直起降和机动飞行能力,广泛应用于无人机领域。
四轴飞行器的基本相关知识

四轴飞⾏器的基本相关知识四轴飞⾏器的基本相关知识:四轴,顾名思义就是有四根轴的飞⾏器,它可以垂直起降,但与直升机⼜⼤不相同,是这⼏年来迅速兴起的⼀种飞⾏器本教程制作的是轴距550mm的1kg级别四轴飞⾏器,可以满⾜航拍(平民级别)等⼀系列需求,载重余量较⼤,扩展性也⾼。
组成部分:⽆刷电机*4⽆刷电调*4飞控板*1电池遥控器四轴机架名词解释:⽆刷电机:指航模⽤的三相交流⽆刷电机,低端品牌有新西达,好⼀点的有朗宇等;在这⾥我们选择2212级别kv850-1050之间的⽆刷电机(想知道具体是什么样的电机?TB⼀下“2212 kv1000”)很多⼈会问为什么不⽤直流电机?第⼀马⼒不够;第⼆⾃重太⼤;第三寿命太短;第四转速太⾼;第五效率低下;第六实践证明直流电机不适合做四轴动⼒。
不要和我说空⼼杯,那是玩具四轴⽤的。
⽆刷电调:即输出三相交变电流的电⼦调速器因为我们⽤电池供电,输出的是直流,需要经电⼦调速器(简称电调)转换成三相交流电。
同时电⼦调速器可以接受遥控信号从⽽调整电机转速。
这⾥我们选⽤20A ~30A 的电调,同样也有低端电调⽐如新西达,建议⼊门的话采⽤好盈20A电调。
(想了解更多有关电调?TB⼀下“⽆刷电调20A”)飞控板:即飞⾏控制板,是飞⾏器的灵魂!!飞控板的基本功能就是协调四个电机的转速,⽐如要悬停,它就不停修正各个电机转速达到悬停,此时你不需要⼿动修正就可以问问地悬停了(我们称为⾃稳模式);要前进,则四轴后⽅的电机转速增加,四轴被“顶”向前;后退,左移,右移同理;要旋转,则通过调整对⾓两个电机转速实现,这个以后再说。
⼀般飞控板除了⾃稳之外,还各⾃⽀持不同功能,如航拍云台控制、led夜航灯、gps模块等。
⼊门可以选择⽟兔飞控、mmc10(FF)飞控等,价格便宜,也相对容易调试。
友情提醒:千万不要贪便宜去买KK飞控,你会后悔死的;也不要买MWC!!图为⽟兔飞控接下来讲讲电池。
我们⽤锂聚合物电池,⽽且是⼤容量锂聚合物,⽽且是20倍放电电池,⽽且是三⽚电芯串联,也就是3.7*3=11.1V电压!哪⾥去买到这样的电池,还要⾃⼰串联?淘宝已经给你准备好了。
四轴飞行器飞行原理是什么
四轴飞行器飞行原理是什么
四轴飞行器,作为一种无人机技术中的代表性产品,其飞行原理是基于物理学和航空动力学的原理。
四轴飞行器主要通过螺旋桨的旋转产生的推力来实现飞行,其飞行原理主要包括以下几个方面:
1. 失重飞行原理
四轴飞行器通过旋转的螺旋桨产生向下的推力,利用这种推力和重力之间的平衡关系来实现失重状态下的飞行。
在失重状态下,四轴飞行器可以在空中保持平稳悬停,实现自由飞行的能力。
2. 姿态控制原理
四轴飞行器通过控制不同螺旋桨的旋转速度和方向,可以实现飞行器的姿态调整,包括翻滚、俯仰、偏航等动作。
通过调整各个螺旋桨的输出力,可以让飞行器在空中做出各种复杂的飞行动作。
3. 控制系统原理
四轴飞行器内部配备了一套复杂的控制系统,包括传感器、微处理器、飞行控制器等组件。
这些组件可以实时感知飞行器的状态,通过算法实现飞行器的稳定控制和飞行路径规划。
4. 空气动力学原理
四轴飞行器在飞行过程中会受到空气动力学的影响,包括升力、阻力、侧风等因素。
通过利用这些空气动力学的原理,可以使四轴飞行器在不同环境下实现稳定的飞行。
四轴飞行器的飞行原理是一个综合性的理论体系,涉及到物理学、数学、控制理论等多个学科的知识。
只有深入理解这些原理,才能更好地掌握四轴飞行器的飞行技术,实现更加精准和稳定的飞行控制。
四轴机器人工作原理
四轴机器人工作原理四轴机器人是一种能够在空中自由飞行的无人机,它的工作原理涉及到多个方面的知识,包括飞行控制、动力系统、传感器和通信系统等。
在本文中,我们将深入探讨四轴机器人的工作原理,帮助读者更好地理解这一先进技术。
首先,四轴机器人的飞行控制是其工作原理的核心之一。
飞行控制系统通常由飞控主板、陀螺仪、加速度计和遥控器等组成。
飞控主板是整个系统的大脑,负责接收和处理传感器数据以及遥控指令,并控制电机的转速和舵机的角度,从而实现飞行姿态的稳定控制。
陀螺仪和加速度计则分别用于测量飞行器的角速度和加速度,为飞控主板提供实时的飞行状态信息。
遥控器则是操作员与飞行器之间的桥梁,通过遥控器,操作员可以实时地控制飞行器的飞行姿态和飞行轨迹。
其次,动力系统是四轴机器人工作原理中不可或缺的一部分。
一般来说,四轴机器人的动力系统由四个无刷电机和相应的螺旋桨组成。
电机通过飞控主板输出的PWM信号驱动,从而驱动螺旋桨旋转,产生升力和推力,实现飞行器的升空和飞行。
同时,电机的转速和扭矩也受到飞控主板的精确控制,以保证飞行器的稳定飞行。
另外,传感器在四轴机器人的工作原理中也起着至关重要的作用。
除了陀螺仪和加速度计外,四轴机器人还可能搭载其他传感器,如气压计、GPS模块、视觉传感器等。
这些传感器可以为飞控系统提供更丰富的环境信息,帮助飞行器更准确地感知周围环境,实现自主飞行和导航。
最后,通信系统也是四轴机器人工作原理中不可或缺的一环。
通信系统可以分为遥控器与飞行器之间的通信和飞行器与地面控制站之间的通信两部分。
遥控器与飞行器之间的通信一般采用2.4GHz的射频信号,通过无线方式实现遥控指令的传输。
而飞行器与地面控制站之间的通信则可能采用WiFi、4G或者其它无线通信技术,实现飞行器状态信息的上传和控制指令的下发。
综上所述,四轴机器人的工作原理涉及飞行控制、动力系统、传感器和通信系统等多个方面的知识。
只有这些方面的紧密配合和协同工作,才能保证四轴机器人的稳定飞行和良好的飞行性能。
四轴飞行器的原理

四轴飞行器的原理
四轴飞行器的工作原理是通过四个电动马达驱动四个螺旋桨来产生升力和推力,从而使飞行器能够在空中悬浮和移动。
飞行器的四个螺旋桨分布在四个角落,其中两个螺旋桨沿着飞行器的纵轴方向旋转(称为俯仰轴),另外两个螺旋桨沿着飞行器的横轴方向旋转(称为横滚轴)。
当电动马达控制螺旋桨的转速时,飞行器就可以按照设定的姿态进行俯仰和横滚。
为了保持平衡,四轴飞行器需要通过控制螺旋桨的转速来调整四个角落的升力差异。
当一个螺旋桨的转速增加时,该位置的升力增加,飞行器就会向相反的方向倾斜。
通过合理地调整螺旋桨的转速和升力分配,飞行器就可以实现前进、后退、向左和向右的动作。
此外,飞行器还具备一个垂直方向上的螺旋桨(称为偏航轴),它控制飞行器的转向。
通过调整垂直方向的螺旋桨的转速,飞行器可以实现左转或右转。
为了控制飞行器的姿态和移动,在飞行器上安装了陀螺仪、加速度计、气压计等传感器,通过获取和处理这些传感器的数据,飞行控制系统可以不断调整螺旋桨的转速和升力分配,从而实现精准的操控和飞行。
【创客】手把手教你DIY四轴无人飞行器(建议收藏!)

【创客】⼿把⼿教你DIY四轴⽆⼈飞⾏器(建议收藏!)很多DIY爱好者想做⼀个⾃⼰的⽆⼈机,但很多⼈都被制作过程中的各种问题难住。
不去研究复杂的算法和硬件,也能做出⾃⼰满意的⽆⼈飞⾏器?那么你就来对地⽅了!现在,我们从零开始⼿把⼿教你DIY四轴⽆⼈飞⾏器!DIY制作的四轴飞⾏器配置清单:1.四轴机架(轴距450mm)2.中⼼沉⾦PCB板3.好盈天⾏者30A⽆刷电调4.朗宇2212⽆刷电机(980KV)5.3200mah锂电池(30C)6.APM2.8开源飞控7.M8N GPS8.BB响(低压报警器)9.减震架10.MR 1045(1047)正反螺旋桨11.电流计12.⾹蕉头,T插,⾼温硅胶线材等若⼲⼩零件⾸先普及⼀下基础知识⼩葵花课堂1.⽆刷电机(图为有刷电机)我们⼩时候玩的四驱车⾥⾯的马达⼀般都是直流有刷电机,有刷电机⼯作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流⽅向的交替变化是随电机转动的换相器和电刷来完成的,简单来说,就是通过电刷改变线圈的电磁场⽅向,因此有刷电机是可以直接使⽤直流电驱动。
顾名思义,⽆刷电机是没有电刷的,它只能通过⽅向交替的电流来改变电磁场,因此⽆刷电机需要电调(电⼦调速器)将直流电转化为交流电才能正常⼯作。
(图为⽆刷电机)航模通常使⽤⽆刷电机,⽆刷电机相对来说可以容易达到很⾼的速度,响应速度也会更快。
⽆刷电机去除了电刷,最直接的变化就是没有了有刷电机运转时产⽣的电⽕花,这样就极⼤减少了电⽕花对遥控⽆线电设备的⼲扰。
这次我使⽤的是朗宇的电机(建议不要使⽤新西达的电机和电调,质量太烂)。
选⽤的980KV的电机配MR 1045或1047的螺旋桨(MR指四轴专⽤桨)。
其中,KV值是挑选⽆刷电机的⼀个重要指标。
⽆刷电机KV值定义为转速/V,意思为输⼊电压增加1伏特,⽆刷电机空转转速增加的转速值。
从这个定义来看,我们能知道,⽆刷电机电压的输⼊与电机空转转速是遵循严格的线性⽐例关系的。
基于单片机的四轴飞行器设计及仿真

摘要四轴飞行器具备飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。
可应用于军事上的地面战场侦查和监视,获取不易获取的情报。
能执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在平安巡捡,大型化工现场等人工不容易到达的空间作业。
因此,四轴飞行器的研究意义重大。
本文主要讨论四轴飞行器的设计实现、建模分析与控制器设计。
首先从历史的角度介绍小型四轴飞行器的开展现状,引入现代四轴飞行器的研究,以及运用现代控制理论进展的研究方法和取得的结果。
其次是给出本次毕业设计的四轴飞行器样机模型与飞行控制器电路设计。
文中着重从机械构造与飞行控制器硬件电路设计方面论述四轴飞行器的设计。
文中详细分析了机械构造设计中的元器件选型,实现了一个切实可用,能满足应用研究的四轴飞行器模型。
之后分析四轴飞行器的飞行控制原理,在此根底上进展动力学分析,建立四轴飞行器的动力学模型。
通过软件设计实现飞行控制器方案,并通过protues软件践行模拟仿真以讨论其可行性。
关键词:四轴飞行器;单片机;飞行控制器;无人机ABSTRACT TheKeywords:Four aircraft; SCM; Flight controller; UAV目录1.绪论 (1)1.1国外研究现状 (1)1.2本文研究目的及意义 (2)1.3本文的主要容 (3)2.机械构造设计 (4)2.1元器件的选择 (4)2.1.1四轴飞行器根本工作原理 (4)2.1.2旋翼和机架确实定 (5)2.1.3其他小部件的选择 (5)2.2电机 (6)2.3总体构造 (7)3.硬件设计 (10)3.1概述 (11)3.2硬件电路的设计与选型 (11)3.2.1飞行控制系统构造 (11)3.2.2单片机选型及介绍 (12)3.2.3电机驱动电路 (14)3.2.4无线通讯与遥控 (17)3.2.5电源电路设计 (18)3.3 硬件局部整体电路图 (19)4.软件设计及调试分析 (20)4.1PWM调速原理分析 (20)4.2调速局部设计及分析 (22)4.3红外遥控系统的程序设计 (26)4.3.1红外发射局部 (26)4.3.2红外接收局部 (28)4.3.3键盘设计 (31)5. 调试分析 (33)5.1 Protues简介 (33)5.2调试结果分析 (37)完毕语 (38)致 (39)参考文献 (40)附录A:外文原文 (41)附录B:中文翻译 (51)附录C:程序源代码 (55)1 绪论1.1国外研究现状四轴飞行器是无人飞行器的一种,也就是智能机器人,四轴指飞行器的动力是由四个旋翼式的飞行引擎提供。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
我们在制作一个非常袖珍的四轴飞行器,就用PCB作为承力结构。
第一个版本被命名为疯狂直升机。
它的主要特点有:
∙STM32 Cortex-M3 CPU
∙3轴加速度计
∙1轴/2轴陀螺仪
∙Nordic 2.4GHz 射频通信芯片
∙电动机,螺旋桨和银辉(Silverlit)X翼模型飞机的电池
这架直升机可以从电脑上通过USB无线适配器遥控。
我们制作了三架样品(每个成员各一架),并完成了大多数的固件程序。
为了达到稳定飞行的目的,还需要解决一些控制上的问题,以及完成电脑上的控制程序模块。
更多的信息和实际飞行视频会在稍后公布:)
这架直升机是通过PC机上运行的Python程序控制的,我们实际上用一个游戏机的蓝牙手柄来操纵它。
疯狂直升机四轴飞行器详述
像承诺过的那样,我们要在这里公布疯狂直升机(也是我们第一架四轴飞行器)的更多信息。
该系统的主要架构如下:
疯狂直升机的高层次系统图。
直升机本身是围绕CPU组织起来的。
CPU的任务是读取物理传感器(陀螺仪和加速度计)的测量结果,给出控制信号控制电机,让直升机保持稳定。
通过一个控制反馈回路,CPU每秒能够对电机发送250次调节转速的指令。
无线通信的带宽需求很低,仅仅需要发送操作命令和接受遥测数据。
CPU上运行的程序可以通过无线通信更新。
控制和遥测程序在电脑上运行,控制程序从手柄读取输入,然后向直升机发送命令。
我们也有调节直升机上控制参数的程序模块,并且会记录下传感器的测量结果,方便调整控制回路。
所有这些开发工作在Windows或linux系统上完成。
事实上有三个人同时在这个项目上工作,两个人在Linux上工作,剩下一个人主要使用Windows。
利用自由/开源软件(FLOSS,Free/Libre and Open Source Software)许可对提高工作效率非常有帮助。
我们主要使用GCC 编译器编译直升机程序,GNU(GNU's Not Unix,一个包含了递归的缩写!GNU Linux工程是为与可复制﹑修改﹑和重新分配的源代码一起的类Unix操作系统的发展而建立的。
)建立我们的工程,Mercurial(一个轻量级的分布式版本控制系统)管理我们的源代码,与直升机之间的通讯采用python/pyusb(一个python上的USB通讯软件库)。
所有这些软件都能在linux和windows系统间来回无缝切换,使这个项目的管理变得容易许多。
电动机之间的距离(X轴和Y轴方向)大约有8cm,整个飞行器的重量只有20g。
电路板顶面的细节
疯狂直升机电路板顶面细节
电路板顶面包含了传感器和控制/通讯电路。
∙JTAG/串行接口用来向处理器编程,传送debug信息。
∙CPU是STM32 Cortex - M3。
时钟设定为内部振荡器64MHz。
∙2轴X-Y陀螺仪InvenSense IDG500。
它的模拟信号输出连接到CPU的模数转换器。
∙Z轴陀螺仪InvenSense ISZ500。
和X-Y陀螺一样,模拟信号输出连接到CPU的模数转换器。
∙ 2.4GHz的射频通信基于Nordic的nRF24L01 芯片。
它实际上是一个通过SparkFun 出售的带接口电路板,通过SPI端口连接到CPU。
∙3轴加速度计是Bosch SMB380。
它通过I²C总线连接到CPU。
电路板底面的细节
疯狂直升机电路板底面细节
这里没有什么特别之处,除了一小块电池通过胶带粘在电路板底面。
这些电池来自一架Silverlit x-twin模型飞机,允许我们的直升机飞行4.5分钟。
电池下方的电路细节
在电池下方是供电电路和功率控制电路。
∙充电插座连接外界的5V电源,给电池充电
∙电源开关切换直升机的电源供应(连接器/充电电池)
∙5V升压电路将3〜4V的电池电压升压到5V。
∙两个3.3V线性稳压器,从5V电压降压输出3.3V电压。
数字和模拟3.3V供电电压相互独立。
这是为了减少对模拟器件的噪声干扰(两个陀螺仪,设计中很重要的一部分)。
∙最后,在四个侧边正中有电动机的驱动晶体管。
电能从PCB梁的顶部和底部布线传送,为电动机提供能量。
值得一提的是,我们在3.3V稳压器右边放置了电池充电芯片,这是一片常用的MAX1555,它工作的很好。
使用升压电路的目的在于在电池的基础上提供更加稳定的供电,在电池即将耗尽,电压开始下降时它特别有效,同时还能够减小电机驱动电路带来的噪声。
但是说到底这些芯片使用2.8V线性稳压器供电就能工作,因此我们计划在下一个版本中取消升压电路,同时还打算把无线通讯模块也集成到电路板上。
电动机和螺旋桨都来自Silverlit x-twin模型飞机,它们直接由电池电压供电。