实现异步串口
嵌入式编程中的异步串口通信
嵌入式编程中的异步串口通信第一章前言嵌入式编程是指在微控制器、单片机、嵌入式处理器等嵌入式系统中开发应用程序的一种软件开发方式。
在嵌入式系统中,串口通信是一种非常常见的通信方式。
而异步串口通信则是一种常用的串口通信方式,并且其在嵌入式系统中应用非常广泛,因此本文将就嵌入式编程中的异步串口通信进行详细的探讨。
第二章异步串口通信的基础知识异步串口通信是指每个字节之间没有固定的时间间隔,而是通过起始位、数据位、校验位、停止位四个元素来标识一个数据帧的开端和结尾,并且每个数据帧之间都是独立的。
异步串口通信相较同步串口通信而言,这种通信方式的实现成本较低,因此应用广泛。
异步串口通信这这四个元素的意义:1. 起始位:表示数据帧的开始,通常为逻辑低电平;2. 数据位:表示每一个字符的长度,一般可以是5、6、7、8位;3. 校验位:用于检测数据传输过程中是否发生错误;4. 停止位:表示数据帧的结束,通常为逻辑高电平。
需要注意的是,异步串口通信不能在两台计算机之间进行通信,因为两台计算机的时钟不同,会产生较多的误差,导致信号解析不准确。
第三章异步串口通信的实现方法在嵌入式编程中要实现异步串口通信,通常需要使用到中断、轮询两种方式,本文将就这两种方式进行详细的介绍。
3.1 中断方式中断方式是指当接收到一个字符之后,CPU会暂停当前正在运行的程序,转而执行中断服务程序。
中断服务程序就是在接收到字符之后,在中断中处理接收到字符的操作。
使用中断方式实现异步串口通信可以大大提升程序的效率,而且还可以减少程序的耦合度。
使用中断方式实现异步串口通信需要调用中断服务函数,并将其注册到对应的中断向量上,以实现中断函数的执行。
3.2 轮询方式轮询方式是指程序通过不断地查询串口缓冲区是否有数据,来实现数据的接收和发送。
这种方式比较容易实现,但是由于需要不断地查询缓冲区,因此会占用较大的CPU时间。
在实时性要求较高的系统中,轮询方式并不适用。
Win32API 异步串口通讯

使用Win32API实现Windows下异步串口通讯目录:1.异步非阻塞串口通讯的优点2.异步非阻塞串口通讯的基本原理3.异步非阻塞串口通讯的基础知识4.异步非阻塞串口通讯的实现步骤一,异步非阻塞串口通讯的优点读写串行口时,既可以同步执行,也可以重叠(异步)执行。
在同步执行时,函数直到操作完成后才返回。
这意味着在同步执行时线程会被阻塞,从而导致效率下降。
在重叠执行时,即使操作还未完成,调用的函数也会立即返回。
费时的I/O操作在后台进行,这样线程就可以干别的事情。
例如,线程可以在不同的句柄上同时执行I/O操作,甚至可以在同一句柄上同时进行读写操作。
"重叠"一词的含义就在于此。
二,异步非阻塞串口通讯的基本原理首先,确定要打开的串口名、波特率、奇偶校验方式、数据位、停止位,传递给CreateFile()函数打开特定串口;其次,为了保护系统对串口的初始设置,调用GetCommTimeouts()得到串口的原始超时设置;然后,初始化DCB对象,调用SetCommState() 设置DCB,调用SetCommTimeouts()设置串口超时控制;再次,调用SetupComm()设置串口接收发送数据的缓冲区大小,串口的设置就基本完成,之后就可以启动读写线程了。
三,异步非阻塞串口通讯的基础知识下面来介绍并举例说明一下编写异步非阻塞串口通讯的程序中将会使用到的几个关键函数CreateFile()功能:打开串口设备函数原型HANDLE CreateFile(LPCTSTR lpFileName, // 串口名称字符串;如:"COM1" 或"COM2"DWORD dwDesiredAccess, // 设置读写属性(访问模式);一般为GENERIC_READ|GENERIC_WRITE, DWORD dwShareMode, // 共享模式;"必须"为0, 即不能共享LPSECURITY_ATTRIBUTES lpSecurityAttributes, // 安全属性;一般为NULLDWORD dwCreationDistribution, // 创建方式,串口设置必须设置此值;在这里"必须"为OPEN_EXISTING DWORD dwFlagsAndAttributes, // 文件属性和标志;在这里我们设置成FILE_FLAG_OVERLAPPED ,实现异步I/OHANDLE hTemplateFile // 临时文件的句柄,通常为NULL);说明:如果调用成功,那么该函数返回文件的句柄,如果调用失败,则函数返回INVALID_HANDLE_VALUE。
UART的异步串口通信VHDL实现
UART的异步串口通信VHDL实现UART 的异步串口通信协议的VHDL 语言实现异步串行通信的采用的波特率为9600b/s,外配晶体振荡器的频率为3.6864MHZ ,故采用分频电路package width isconstant N:integer:=8;end width;use work.width.all;library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_arith.all;use ieee.std_logic_unsigned.all;entity fredivn isGENERIC (N:integer:=6);port(clkin: in std_logic;clkout: out std_logic);end fredivn;architecture behav of fredivn issignal count : integer;beginprocess(clkin)beginif (clkin'event and clkin=1)thenif(count<n-1)then< p="">count<=count+1;else count<=0;end if;if (count<="" p="">clkout<='1';else clkout<='0';end if;end if;end process;end behav;异步接收模块 RXD 的端口clk 为输入时钟,rx 为串行数据接收,sig1为接收中断标志,q 为并行数据输出程序流程如下:sig1是接收中断标志位,当是低电平时,说明接收过程并未启动,于是检测电平,当rx 电平为低时,sig2开始计数,若连续8次采样rx 都是低电平,则说明是起始位,启动接收过程,每隔16个接收时钟接收1位数据直至11位接收完毕,并行输出口是一个串并转换。
基于TMSMS320C6713异步串口通信的设计与实现

.. _
6 一_o
瞰DR ±rJ R2。Irr R 上*
I)X l
lI TIIN Tl01JT 14
L -0 丁 -O'- 0
10 髓瑚 T:0UT 二 . 0 D 三
oND . ..一-J
上 --0 上 一o .旦. ---0
啦 上
广L /
趣 0ND
片 的更新和发展 以及 CPU运算速度 的不断提高 , 接收到 的信号是 同步信号 。本设计在 McBSP与
芯片的性价比也越来越 高 。因此 DSP在通信 、家 串 口之 间加 了一 个 电 平 转 换 芯 片 MXA3232,把
电 、医疗 器 械 、电力 、组 合 导航 等 领 域 发 挥着 重 要 rrrL电平 转 换 为 RS232之 后 才 能 实 现异 步 串 口。
70
机 电技术
2016年 4月
基 于 TMS320C6713异 步 串口通信 的设计与实现
刘 义 王 玲 赵艳 霞 郝永平
(沈 阳理工大学 兵器科学技术研究 中心 ,辽宁 沈阳 110159) 摘 要 :为 了解决 TMS320C6713没有异 步串 口通信 的问题 ,文 中介绍 两种方法来 实现 串ISl异步通信 :多通道缓 冲串 行 接 口(McBSP)和增 强型直接存储器存取 (EDMA);多通道缓 冲串行接 口(McBSP)和 MAX3111。经实验验证这两种方案 不但解决 了TMS320C6713芯片只有 同步串 口而不能进行异步传输 的问题 ,而且 软 、硬件设计 比较简单 、成本低 ,便于实现。 关键词 :TMS320C6713;异步串 口通信 ;McBSP;MAX3111 中图分类号 :TP211 文献标识码 :A 文章编号 :1672—4801(2016)02—070—04
异步串行通信的实现 包含源程序

1、基本知识:1、-- 异步串行通信数据帧格式如下:起始位为‘0’,停止位为1-2位‘1’;奇偶校验位为可选,数据为5-8位可选。
2、波特率指的是每秒钟发送的字符(一位数据位)的个数,1B=1b/s。
如波特率为9600B,那么发送一个数据位所需要的时间为1/9600 s;发送/接收时钟的频率与波特率的关系为:发送/接收时钟的频率= n x发送/接收波特率。
其中n = 1 、16、64;我们在这里取n = 16 ;即对每一位数据都采样16次。
2、功能实现-- 本模块的功能是验证实现和PC机进行基本的串口通信的功能。
需要在PC机上安装一个串口调试工具来验证程序的功能。
程序实现了一个收发一帧10个bit(即无奇偶校验位)的串口控制器,10个bit是1位起始位,8个数据位,1个结束位。
程序分为三个模块:时钟分频模块,接收数据模块,发送数据模块。
具体程序代码为:library IEEE;use IEEE.STD_LOGIC_1164.ALL;-- Uncomment the following library declaration if using-- arithmetic functions with Signed or Unsigned values--use IEEE.NUMERIC_STD.ALL;-- Uncomment the following library declaration if instantiating-- any Xilinx primitives in this code.--library UNISIM;--use UNISIM.VComponents.all;entity uart isport( CLK50M : in std_logic;reset : in std_logic;uart_tx : out std_logic;uart_rx : in std_logic);end uart;architecture Behavioral of uart issignal div_clk50M :std_logic; ----分频后的时钟信号s ignal rx_data : std_logic_vector(7 downto 0); --- 接收数据缓存s ignal tx_data : std_logic_vector(7 downto 0); ----发送数据缓存s ignal data_buf: std_logic_vector(7 downto 0); --- 接收数据存储t ype state_rx is (rx_idle,rx_start,rx_sample,rx_stop); ---接收状态机s ignal rx_state : state_rx := rx_idle;t ype state_tx is (tx_idle,tx_start,tx_send,tx_stop); --发送状态机s ignal tx_state : state_tx := tx_idle;s ignal send_enable : std_logic :='0';begin--- --------CLK_Div module---------------------Bauds = 9600B clk=50M division factor = 50M/(9600x16)=325---------------------------------------------CLK_DIV: process(CLK50M,reset)variable div_count : integer :=0; -----分频系数变量beginif(reset='1') then div_clk50M <='0'; div_count :=0;elsif(rising_edge(CLK50M)) thenif div_count>=325 then div_clk50M <= '0'; div_count :=0;elsif div_count>=162 thendiv_count := div_count + 1;div_clk50M <= '1';else div_count :=0; div_clk50M <= '0';end if;end if;end process CLK_DIV;-----------------------------------------------------------DATA Receive module------------DATA_R : process(div_clk50M,reset)variable rx_count : integer :=0; -- 实现每16个时钟采样一次的中间变量。
自动测试系统中异步串口通信的实现修改版10.12(通用测试12月)

自动异步串口通信的实现 The Realization of Serial Communication in Automatic Test System姚文华,秦开宇,李志强(电子科技大学空天科学技术研究院,四川成都 610054)Yao Wen-hua, Qin Kai-yu, Li Zhi-qiang(Institute of Astronautics & Aeronautics, UESTC of China, Sichuan Chengdu 610054)摘要:为了实现自动测试系统软件中常采用的串口通信,采用Labview设计并实现了一个异步通信串口的程序。
该程序主要用VISA实现串口的配置,寻址,进而实现串口的打开、关闭、读和写的功能;在此基础上,该程序对串口读来的数据进行了一些处理,如按帧显示。
从而有一个简单的判断的过程,避免了一些错误的数据。
使得程序有一定的容错功能。
实验表明,该串口程序稳定性好、可重用、易组合、使用方便,具有较高的工程应用价值。
关键词:Labview;按帧显示;异步串口;VISA;CP-132中图分类号:TN915.09 文献标识码:A 文章编号:Abstract:The realization of the serial communication which often used in the software of the automatic test system is introduced.VISA is mainly used to configure, read, write and close the serial port. Based on this, some othrer processes, such as display by frame which is used to avoid some wrong and to make the program more robust are prompted. The serial programing is stable, reusable and easy to mix, easy to use, which is valuable to use in projectKey words:Labview; display by frame; serial port; VISA; CP-132CLC number: TN915.09 Document code: A Article ID:1引言计算机技术、测试系统总线技术、软件技术和人工智能技术的发展,使得自动测试系统从早期的功能单一、扩展和可移植性差、体系架构思想性落后向现代的开放式架构、标准化、模块化和智能化测试系统发展[1][6]-[10]。
嵌入式系统上的异步串口通信的实现
嵌入式系统上的异步串口通信的实现
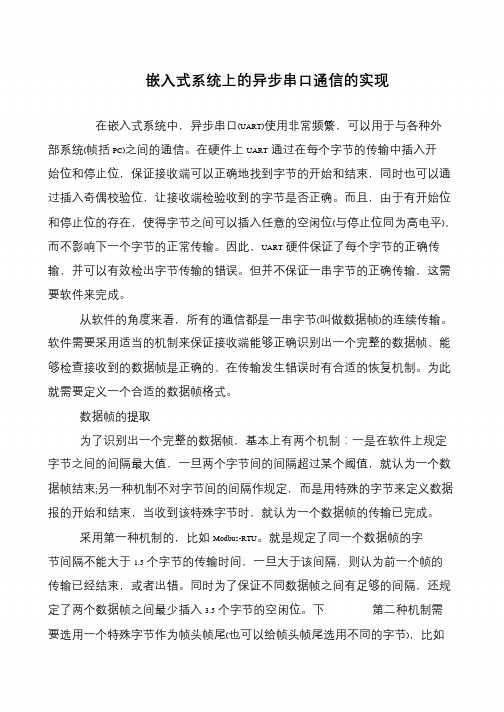
在嵌入式系统中,异步串口(UART)使用非常频繁,可以用于与各种外部系统(帧括PC)之间的通信。
在硬件上UART通过在每个字节的传输中插入开始位和停止位,保证接收端可以正确地找到字节的开始和结束,同时也可以通过插入奇偶校验位,让接收端检验收到的字节是否正确。
而且,由于有开始位和停止位的存在,使得字节之间可以插入任意的空闲位(与停止位同为高电平),而不影响下一个字节的正常传输。
因此,UART硬件保证了每个字节的正确传输,并可以有效检出字节传输的错误。
但并不保证一串字节的正确传输,这需要软件来完成。
从软件的角度来看,所有的通信都是一串字节(叫做数据帧)的连续传输。
软件需要采用适当的机制来保证接收端能够正确识别出一个完整的数据帧、能够检查接收到的数据帧是正确的、在传输发生错误时有合适的恢复机制。
为此就需要定义一个合适的数据帧格式。
数据帧的提取
为了识别出一个完整的数据帧,基本上有两个机制:一是在软件上规定字节之间的间隔最大值,一旦两个字节间的间隔超过某个阈值,就认为一个数据帧结束;另一种机制不对字节间的间隔作规定,而是用特殊的字节来定义数据报的开始和结束,当收到该特殊字节时,就认为一个数据帧的传输已完成。
采用第一种机制的,比如Modbus-RTU。
就是规定了同一个数据帧的字节间隔不能大于1.5个字节的传输时间,一旦大于该间隔,则认为前一个帧的传输已经结束,或者出错。
同时为了保证不同数据帧之间有足够的间隔,还规定了两个数据帧之间最少插入3.5个字节的空闲位。
下第二种机制需要选用一个特殊字节作为帧头帧尾(也可以给帧头帧尾选用不同的字节),比如。
qt串口通信的异步问题
qt串口通信的异步问题
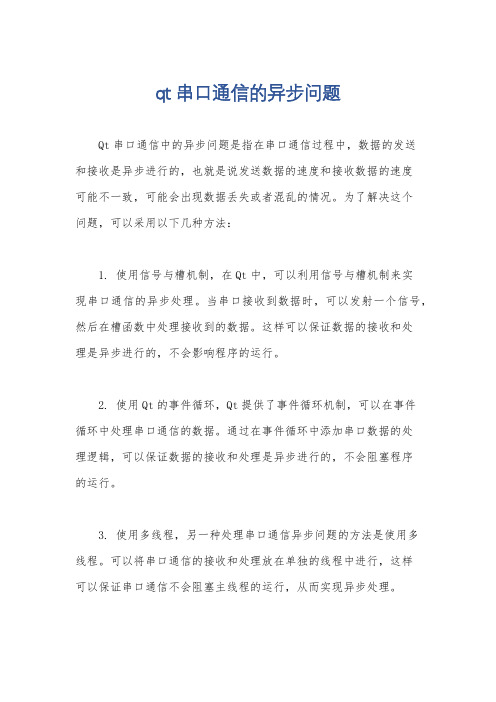
Qt串口通信中的异步问题是指在串口通信过程中,数据的发送
和接收是异步进行的,也就是说发送数据的速度和接收数据的速度
可能不一致,可能会出现数据丢失或者混乱的情况。
为了解决这个
问题,可以采用以下几种方法:
1. 使用信号与槽机制,在Qt中,可以利用信号与槽机制来实
现串口通信的异步处理。
当串口接收到数据时,可以发射一个信号,然后在槽函数中处理接收到的数据。
这样可以保证数据的接收和处
理是异步进行的,不会影响程序的运行。
2. 使用Qt的事件循环,Qt提供了事件循环机制,可以在事件
循环中处理串口通信的数据。
通过在事件循环中添加串口数据的处
理逻辑,可以保证数据的接收和处理是异步进行的,不会阻塞程序
的运行。
3. 使用多线程,另一种处理串口通信异步问题的方法是使用多
线程。
可以将串口通信的接收和处理放在单独的线程中进行,这样
可以保证串口通信不会阻塞主线程的运行,从而实现异步处理。
4. 使用缓冲区,在串口通信过程中,可以使用缓冲区来暂存接收到的数据,然后再进行处理。
这样可以解决数据发送和接收速度不一致时可能出现的问题,确保数据的完整性和准确性。
总的来说,在Qt串口通信中处理异步问题,可以结合使用信号与槽机制、事件循环、多线程和缓冲区等方法,以确保数据的发送和接收是异步进行的,从而提高程序的稳定性和可靠性。
DSP原理与应用实验4-异步串口通讯

课程名称DSP原理与应用实验序号实验4实验项目异步串口通讯实验地点实验学时实验类型指导教师实验员专业班级学号姓名年月日二、实验原理与内容1、UART 简介TMS320DM6437 集成了UART 控制器,支持2 个UART 外设连接。
UART 支持基于工业标准的TL16C550 异步通信模块,支持FIFO 模式数据传输,最大支持16 字节数据的缓存,从而减轻接收和发送数据时CPU 程序的时钟消耗。
TMS320DM6437 集成的UART 控制器可以扩展2 个UART,其对应的信号线分为两组:其中只有UART0 支持modem 模式控制。
SEED-DEC6437 配置UART0 为RS485 模式,UART1 为RS232 模式。
2、UART 的寄存器说明TMS320DM6437 的UART 的寄存器如表示:3、波特率的设置UART 的位时钟是从固定的27MHz 的时钟获取的,支持最高128 kbps 的数据率。
UART的时钟产生原理如下图:UART 波特率产生原理图UART 包含一个可编程的波特率发生器,将输入时钟经过分频产生需要的位时钟,分频值可以在1-65535。
位时钟的频率是波特率的十六倍频,每一个接收发送的数据位占用16个位时钟,接收时,位采样也在第八个位时钟时采样。
分频器值的计算公式如下:分频数= 当前时钟输入(27MHz)/(16 ×期望的波特率)当输入时钟为27MHz 时,支持的波特率如下图所示三、实验软硬件环境SEED—DTK67实验箱,CCS软件,接口线UART 实验,包含文件1. main.c:实验主程序,包含了系统初始化,外扩接口初始化及配置。
2. linker.cmd:声明了系统的存储器配置与程序各段的连接关系。
3. DEC6437.gel:系统初始化程序。
四、实验过程(实验步骤、记录、数据、分析)1. 将DSP 仿真器与计算机连接好;2. 将DSP 仿真器的JTAG 插头与SEED-DEC6437 单元的J9 相连接;3. 打开SEED-DTK6437 的电源。
实现异步串口

异步传输是一种典型的基于字节的输入输出,指数据按每次一个字节进行传输,其传输速度低。
同步传输是把数据字节组合起来一起发送,这种组合称之为帧,其传输速度比异步传输快,同步串口的传送速率高,异步串口实现简单,这是异步串口与同步串口间最主要的区别。
一,异步非阻塞串口通讯的优点读写串行口时,既可以同步执行,也可以重叠(异步)执行。
在同步执行时,函数直到操作完成后才返回。
这意味着在同步执行时线程会被阻塞,从而导致效率下降。
在重叠执行时,即使操作还未完成,调用的函数也会立即返回。
费时的I/O操作在后台进行,这样线程就可以干别的事情。
例如,线程可以在不同的句柄上同时执行I/O操作,甚至可以在同一句柄上同时进行读写操作。
"重叠"一词的含义就在于此。
二,异步非阻塞串口通讯的基本原理首先,确定要打开的串口名、波特率、奇偶校验方式、数据位、停止位,传递给CreateFile()函数打开特定串口;其次,为了保护系统对串口的初始设置,调用 GetCommTimeouts()得到串口的原始超时设置;然后,初始化DCB对象,调用SetCommState() 设置DCB,调用SetCommTimeouts()设置串口超时控制;再次,调用SetupComm()设置串口接收发送数据的缓冲区大小,串口的设置就基本完成,之后就可以启动读写线程了。
三,异步非阻塞串口通讯的基础知识VC串口通信技术网下面来介绍并举例说明一下编写异步非阻塞串口通讯的程序中将会使用到的几个关键函数CreateFile()功能:打开串口设备函数原型1.HANDLE CreateFile(2.LPCTSTR lpFileName, // 串口名称字符串;如: "COM1" 或 "COM2"3.DWORD dwDesiredAccess, // 设置读写属性(访问模式);一般为GENERIC_READ|GENERIC_WRITE,4.DWORD dwShareMode, // 共享模式;"必须"为 0, 即不能共享5.LPSECURITY_ATTRIBUTES lpSecurityAttributes, // 安全属性;一般为NULL6.DWORD dwCreationDistribution, // 创建方式,串口设置必须设置此值;在这里"必须"为 OPEN_EXISTING7.DWORD dwFlagsAndAttributes, // 文件属性和标志;在这里我们设置成FILE_FLAG_OVERLAPPED ,实现异步I/O8.HANDLE hTemplateFile // 临时文件的句柄,通常为NULL9.);函数说明:如果调用成功,那么该函数返回文件的句柄,如果调用失败,则函数返回INVALID_HANDLE_VALUE。
异步串口通信原理
异步串口通信原理一、什么是异步串口通信?异步串口通信是指数据传输时,发送方和接收方的时钟信号不同步,数据的传输是不同步的。
在异步串口通信中,数据的传输是以字节为单位进行的,每个字节的传输都包含了一个起始位、数据位、奇偶校验位和一个或多个停止位。
二、异步串口通信的原理异步串口通信的原理是利用串行通信的方式,将数据一位一位地传输,每个字节都包含了一定的控制信息,以保证数据的正确性。
异步串口通信中,数据传输的速率是通过波特率来确定的。
波特率是指每秒钟传输的比特数,常用的波特率有9600、19200、38400等。
在异步串口通信中,发送方和接收方需要事先约定好数据传输的格式,包括数据位、奇偶校验位和停止位等。
数据位表示每个字节中实际的数据位数,通常为8位。
奇偶校验位用于检测数据传输过程中的错误,通常有奇校验和偶校验两种方式。
停止位用于表示数据传输的结束,通常为1个或2个停止位。
三、异步串口通信的应用异步串口通信广泛应用于各种设备之间的数据传输中,例如计算机与打印机、计算机与单片机、计算机与PLC等。
在计算机与单片机之间的数据传输中,常常使用USB转串口的方式进行通信。
由于USB接口具有更高的传输速率和更稳定的传输性能,因此USB转串口的方式已经成为了现代计算机与单片机之间的主要通信方式。
四、异步串口通信的优缺点异步串口通信的优点是传输速率较慢,但传输距离较远,且传输稳定可靠。
由于异步串口通信是以字节为单位进行传输的,因此可以保证数据的完整性和正确性。
同时,异步串口通信的传输距离可以达到几十米甚至上百米,因此非常适合用于远距离数据传输。
异步串口通信的缺点是传输速率较慢,无法满足大量数据的传输需求。
同时,由于异步串口通信是以字节为单位进行传输的,因此在传输大量数据时,会产生较大的传输延迟,影响传输效率。
五、总结异步串口通信是一种基于串行通信的数据传输方式,具有传输距离远、传输稳定可靠等优点。
在计算机与单片机、计算机与PLC等设备之间的数据传输中,异步串口通信已经成为了一种常用的通信方式。
异步串口工作原理

异步串口工作原理你看啊,异步串口就像是一个特别的小邮差。
想象一下,在一个超级大的信息世界里,各种设备都要互相传递消息,就像咱们互相写信一样。
异步串口这个小邮差呢,它的工作方式可有点特别哦。
异步串口在传递数据的时候,就像咱们说话一样,一个字一个字地来,不过它传递的是数据位啦。
它不是一股脑儿地把所有数据一下子就扔出去,而是有自己的节奏。
比如说,它会先有一个起始位,这个起始位就像是咱们说话前的“嗨”,告诉接收端:“我要开始发数据啦,你可听好了哦。
”这个起始位就像是一个小信号,让接收端做好准备。
在发送数据位的过程中,异步串口可不会太着急。
它按照一定的速度,也就是波特率来发送。
波特率就像是我们说话的速度,如果波特率快呢,就像是我们说得很快,数据传输得就快;要是波特率慢呢,就像是我们慢慢地一个字一个字地说。
等数据位都发送完了,它还会有一个停止位。
这个停止位就像是我们说完话后的一个小停顿,告诉接收端:“好啦,我这次的数据发送完了。
”这个停止位就像是一个小句号,给这次的数据传输画上一个小句号。
那接收端是怎么知道接收到的数据是正确的呢?这就像是我们听别人说话,有时候会判断一下有没有听错一样。
异步串口的接收端会根据一些规则来检查数据。
比如说,它会看这个起始位是不是对的,数据位的数量和顺序是不是符合规定,还有停止位是不是正常。
如果有哪里不对,它就知道这个数据可能有问题啦。
异步串口还有个很有趣的地方呢。
它就像一个很独立的小工人,不需要和发送端时刻保持完全同步的时钟信号。
不像有些其他的传输方式,就像两个人跳舞,必须紧紧跟着同一个节奏。
异步串口呢,它只要按照自己的节奏,通过起始位和停止位就能很好地完成数据传输。
这就给它带来了很大的灵活性。
比如说,在一些简单的设备连接中,不需要那么复杂的时钟同步系统,异步串口就能轻松搞定数据传输的任务。
而且啊,异步串口在很多地方都能看到它的身影。
像我们以前用的那种老式的鼠标和电脑的连接,很多时候就是用异步串口呢。
DSP-通用异步串行口(UART)实验
班级学号姓名同组人实验日期室温大气压成绩实验六通用异步串行口(UART)实验一、实验目的1、掌握异步串行通信协议;2、掌握2812异步收发器模块的应用。
二、实验设备1、一台装有CCS软件的计算机;2、DSP试验箱的TMS320F2812主控板;3、DSP硬件仿真器。
三、实验原理1、异步串行通信协议在传输数据前,数据线处于高电平状态,这称为表示态。
传输开始后,数据线由高电平转为低电平状态,这称为起始位;起始位后面接着5-8个信息位;信息为后面是校验位;校验位后是停止位“1”。
传输完毕后,可以立即开始下一个字符的传输;否则,数据线再次进入标识态。
上面提到的信息位的位数(5~8位)、停止位的位数(1位、1.5位或2位)、校验的方式(奇偶验、偶校验或不校验)等参数都可以根据不同需要进行设置,但对于同一个传输系统中的首发两端来说,这些参数必须保持一致。
异步串行通信方式中另一个重要的参数是波特率。
在一般的“0”“1”系统中,波特率就是每秒钟传输的位数。
国际上规定了一个标准波特率系列,他们是最常用的波特率。
标准波特率系列为110、300、600、1200、1800、2400、4800、9600和19200。
发送端和接收端必须设置统一的波特率,否则无法正确接收数据。
2、电平转换RS-232-C标准中规定-5V~-15V位逻辑“1”,+5V~+15V位逻辑“0”,因此要用专门的芯片完成TTL电平与RS-232电平的转换,如MAX3232。
3、串行口调试助手该计算机端程序可以监测计算机串口接收和发送数据的情况。
本实验中需要用该程序帮助观察实验结果。
四、实验步骤1、用串口线连接实验箱的 UART 模块与计算机串行口;2、在 CCS 环境中打开本实验的工程Example_sci.pjt,编译,生成输出文件,通过仿真器把执行代码下载到DSP 芯片;3、在计算机上运行串口调试助手程序,设置串口为Com1,波特率为9600,校验为None,停止位为1 位,十六进制显示,以待观察从DSP 往PC 串口发送的数据;4、选择“View”->“memory”,起始地址设为“0x1000”,“Page”项设置为“I/O”,以待观察寄存器的值;5、在串口调试助手程序的发送窗口键入任意字符(如“5A”)以待发送至DSP,并且选择手动发送模式(即不选中自动发送项)和十六进制发送;五、实验总结本实验为通用异步串行接口(UART)实验,运行程序后能通过在串口调试助手程序中,在接收窗口中可以观察正确接收到0X00~0XFF的数据。
基于FPGA的异步串口通信技术
基于FPGA的异步串口通信技术一、异步串口通信技术综述:接口通信技术是通信的主要研究领域之一,从数字通信的角度来看,当前主流接口通信技术分为串行通信和并行通信两种。
卫星通信和常见的USB接口通信一般都是采用串口通信技术。
微机系统与其外部I/O设备的接口,如RS232、RS422、RS485等,都是采用串口通信协议。
所谓串行通信,是指两个设备之间,以一个字节(8bit)为一个单位逐位按顺序传送信息,这样可大幅度节省总线资源。
由于使用的是按位传送,即每次只传送一个数据状态,因此使用串行接口的两个设备之间最少可以只使用一根数据线(如果是半双功或是双功情况下,应至少有两根数据线)。
这种接口通信技术的优点是成本较低,但传送距离较远。
与此相对的是并行通信技术,所谓并行通信是指两个设备之间有至少8根数据线(单工情况),在同一时间内8根数据线同时传送数据,这样一次就完成了1个字节的传送。
显而易见,并行通信技术速率更快,但成本也更高。
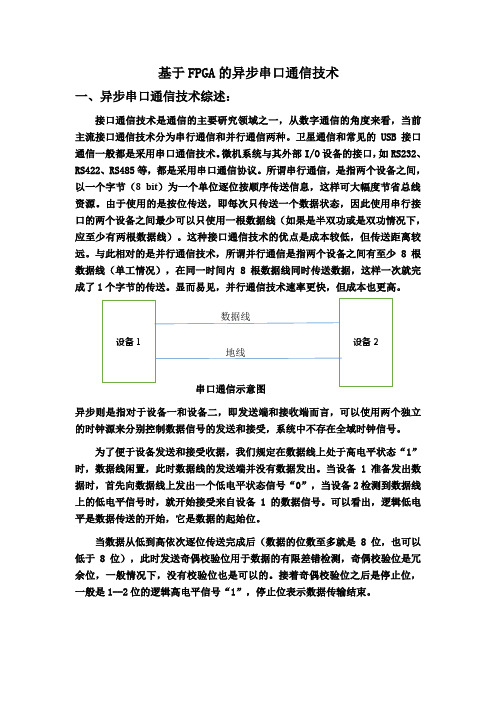
异步则是指对于设备一和设备二,即发送端和接收端而言,可以使用两个独立的时钟源来分别控制数据信号的发送和接受,系统中不存在全域时钟信号。
为了便于设备发送和接受收据,我们规定在数据线上处于高电平状态“1”时,数据线闲置,此时数据线的发送端并没有数据发出。
当设备1准备发出数据时,首先向数据线上发出一个低电平状态信号“0”,当设备2检测到数据线上的低电平信号时,就开始接受来自设备1的数据信号。
可以看出,逻辑低电平是数据传送的开始,它是数据的起始位。
当数据从低到高依次逐位传送完成后(数据的位数至多就是8位,也可以低于8位),此时发送奇偶校验位用于数据的有限差错检测,奇偶校验位是冗余位,一般情况下,没有校验位也是可以的。
接着奇偶校验位之后是停止位,一般是1--2位的逻辑高电平信号“1”,停止位表示数据传输结束。
异步串口通信数据格式二、RS232接口简述:RS232是常见的采用串行接口协议的接口之一,其通信协议与串口通信标准是一致的。
异步串口通信原理
异步串口通信原理
异步串口通信是一种基于串行通信方式的数据传输方式,它可以在不需要时钟信号的情况下实现数据的传输和接收。
异步串口通信需要在传输数据之前先进行一些基本的配置,包括波特率、数据位、停止位和校验位等。
在异步串口通信中,数据是通过一条单独的数据线逐位传输的。
在传输数据之前,发送方和接收方需要确定一些基本的参数,包括传输的波特率、数据位数、停止位数和校验位数。
其中,波特率是指每秒钟传输的位数,数据位数是指每个字节的位数,停止位数是指数据传输完毕后,为了使接收方能够正确识别数据的结束,需要发送一些停止位,而校验位则用于检查数据传输的正确性。
在异步串口通信中,发送方将数据按照预先设定的参数逐位传输,而接收方则通过将接收到的数据逐位保存在缓冲区中,最终将完整的数据还原出来。
由于异步串口通信的数据传输方式是逐位传输,因此其传输速率较慢,通常用于数据传输量较小、数据传输速率不要求过高的应用场合。
总之,异步串口通信是一种常见的数据传输方式,它能够在不需要时钟信号的情况下实现数据的传输和接收。
需要注意的是,在进行异步串口通信时,需要事先确定一些基本的传输参数,以确保数据传输的正确性和稳定性。
- 1 -。
用FPGA实现异步串口与同步串口的转换

用FPGA实现异步串口与同步串口的转换李文亮,姚冬苹北京交通大学现代通信研究所,北京(100044)E-mail:li.wenliang4@摘要:TI公司的TMS320C64xx系列DSP芯片的McBSP同步串口不具备与UART异步串口直接通信的能力,为了解决这个问题,扩展DSP芯片的使用范围,本文介绍了一种新的用FPGA来实现McBSP同步串口与UART异步串口之间相互转换的方法,通过必要的硬件连接和VHDL软件编程,实现了两种串口的转换,经测试,数据传输正确可靠。
关键词:串口通信;McBSP;UART;SPI;FPGA;DSP中图分类号:TP2121.引言DSP芯片在现代数字信号处理中,应用特别广泛,尤其是TI公司的TMS320系列的DSP 芯片。
在实际的应用中,常常需要DSP芯片与PC机或者其他采用UART异步串口的系统之间进行数据交换。
本文采用FPGA,通过必要的软硬件设计解决同步串口与异步串口之间的数据通信问题。
2.DSP的异步串口扩展方案目前使用较多的方式有以下几种。
(1) 在DSP的并行总线上扩展专用的UART芯片(例如TI的TL16C552),用硬件来实现异步串口扩展。
这种方法软件设计简单,但占用了DSP的并行总线,使系统设计复杂化,不利于系统整体设计。
(2) 利用DSP的McBSP和DMA(或者EDMA),在不扩展硬件的基础上,通过软件设计的方式实现异步串口。
这种方法虽然不增加硬件,但是软件复杂,增加了CPU的负荷。
(3) 利用DSP的McBSP同步串行接口与MAX3111异步串行收发器,实现异步扩展,这种方式的硬件和软件设计都比较简单方便,唯一缺点是使成本较高。
(4) 利用DSP的McBSP同步串行接口,通过使用FPGA现场可编程逻辑器件,将同步串口转换为异步串口,这种方式方便灵活,适应性强。
本文采用第四种方案,使用ALTERA公司的cyclone芯片和MAXIM公司的MAX3232电平转换芯片,通过VHDL语言编程,实现DSP芯片和PC机之间的串口通信。
异步串口实现
在用单片机开发各种嵌入式应用系统时,异步串行通信是经常要用到的一种通信模式,很多应用中还要求实现多路异步串行通信。
大家平时熟悉的各种厂家的单片机,绝大部分片上只提供一个硬件UART模块,利用它可以方便实现一路串行通讯。
PIC系列单片机也不例外,在其丰富的产品家族成员中,除高端系列(PIC17/18)一些型号片上带有两路硬件UART模块外,其它大部分型号片上只有一路UART,一些低端廉价的PIC单片机甚至还不带硬件UART。
为了提高系统的性能价格比,就要求设计工程师用软件增加实现一路或多路异步串行通信。
很多工程师对用软件实现的UART在可靠性和效率方面持怀疑态度,其实关键问题是看软件采用何种方式来实现可靠的UART功能。
在讨论具体实现方式前,我们先来简单回顾一下异步串行通信的格式定义。
发送一个完整的字节信息,必须有“起始位”、“若干数据位”、“奇偶校验位”和“停止位”;必须定义每位信息的时间宽度——每秒发送的信息位个数,即为“波特率”。
单片机系统中常用的波特率从300~19 200 b/s。
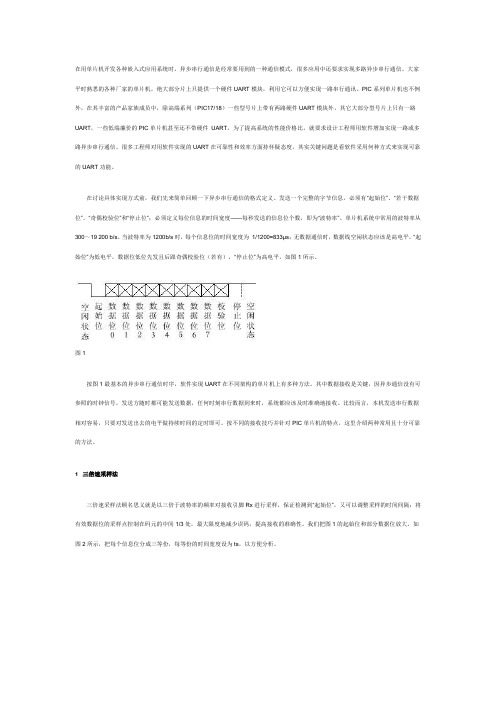
当波特率为1200b/s时,每个信息位的时间宽度为1/1200≈833μs;无数据通信时,数据线空闲状态应该是高电平,“起始位”为低电平,数据位低位先发且后跟奇偶校验位(若有),“停止位”为高电平,如图1所示。
图1按图1最基本的异步串行通信时序,软件实现UART在不同架构的单片机上有多种方法。
其中数据接收是关键,因异步通信没有可参照的时钟信号,发送方随时都可能发送数据,任何时刻串行数据到来时,系统都应该及时准确地接收。
比较而言,本机发送串行数据相对容易,只要对发送出去的电平做持续时间的定时即可。
按不同的接收技巧并针对PIC单片机的特点,这里介绍两种常用且十分可靠的方法。
1 三倍速采样法三倍速采样法顾名思义就是以三倍于波特率的频率对接收引脚Rx进行采样,保证检测到“起始位”,又可以调整采样的时间间隔;将有效数据位的采样点控制在码元的中间1/3处,最大限度地减少误码,提高接收的准确性。
第3 节 异步串口 UART

具有 Avalon 接口的通用异步收发器( universal asynchronous receiver/transmitter——UART)内核实现了Altera FPGA片上的嵌入式系统和片外设备之间的串行的字符流传输的一种方法。
UART内核实现了RS-232协议的定时,并且提供可调的波特率,奇偶校验位、停止和数据位,以及可选的RTS/CTS流控制信号。
特性集是可配置的,允许设计者只实现特定系统的必要的功能。
UART内核提供了寄存器映射的Avalon从接口,这样就允许Avalon主外设(如Nios II处理器)通过读/写数据和控制寄存器和UART内核通信。
UART内核在SOPC Builder中提供,并且可以很容易地集成到任意的SOPC Builder 生成的系统中。
7.3.1 UART 内核功能描述UART 内核有两个部分对用户是可见的:∙寄存器文件,通过Avalon从端口进行访问。
∙RS-232 信号,RXD、TXD、CTS和RTS。
1. Avalon从端口和寄存器UART内核为寄存器提供一个Avalon从端口。
UART内核的用户接口包含6个16位的寄存器: control、status、rxdata、txdata、divisor和endofpacket。
主外设,如Nios II 处理器,访问寄存器来控制内核,在串行的连接通道上传输数据。
UART内核提供一个高电平有效的中断请求输出,当接收到新数据时或UART内核准备发送一个新的字符时,请求一个中断。
Avalon从端口能进行具有流控制的传输。
UART内核可以和具有Avalon流控制的DMA外设联合使用,以实现自动的连续的数据传输,例如内核和存储器之间的传输。
2. RS-232 接口UART内核实现RS-232异步发送和接收逻辑。
UART内核通过TXD和RXD端口发送和接收串行的数据。
大多数Altera FPGA系列的I/O缓存和RS-232 电平不相匹配,如果直接被来自RS-232连接器的信号驱动,可能会对UART内核造成损坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
异步传输是一种典型的基于字节的输入输出,指数据按每次一个字节进行传输,其传输速度低。
同步传输是把数据字节组合起来一起发送,这种组合称之为帧,其传输速度比异步传输快,同步串口的传送速率高,异步串口实现简单,这是异步串口与同步串口间最主要的区别。
一,异步非阻塞串口通讯的优点读写串行口时,既可以同步执行,也可以重叠(异步)执行。
在同步执行时,函数直到操作完成后才返回。
这意味着在同步执行时线程会被阻塞,从而导致效率下降。
在重叠执行时,即使操作还未完成,调用的函数也会立即返回。
费时的I/O操作在后台进行,这样线程就可以干别的事情。
例如,线程可以在不同的句柄上同时执行I/O操作,甚至可以在同一句柄上同时进行读写操作。
"重叠"一词的含义就在于此。
二,异步非阻塞串口通讯的基本原理首先,确定要打开的串口名、波特率、奇偶校验方式、数据位、停止位,传递给CreateFile()函数打开特定串口;其次,为了保护系统对串口的初始设置,调用 GetCommTimeouts()得到串口的原始超时设置;然后,初始化DCB对象,调用SetCommState() 设置DCB,调用SetCommTimeouts()设置串口超时控制;再次,调用SetupComm()设置串口接收发送数据的缓冲区大小,串口的设置就基本完成,之后就可以启动读写线程了。
三,异步非阻塞串口通讯的基础知识VC串口通信技术网下面来介绍并举例说明一下编写异步非阻塞串口通讯的程序中将会使用到的几个关键函数CreateFile()功能:打开串口设备函数原型1.HANDLE CreateFile(2.LPCTSTR lpFileName, // 串口名称字符串;如: "COM1" 或 "COM2"3.DWORD dwDesiredAccess, // 设置读写属性(访问模式);一般为GENERIC_READ|GENERIC_WRITE,4.DWORD dwShareMode, // 共享模式;"必须"为 0, 即不能共享5.LPSECURITY_ATTRIBUTES lpSecurityAttributes, // 安全属性;一般为NULL6.DWORD dwCreationDistribution, // 创建方式,串口设置必须设置此值;在这里"必须"为 OPEN_EXISTING7.DWORD dwFlagsAndAttributes, // 文件属性和标志;在这里我们设置成FILE_FLAG_OVERLAPPED ,实现异步I/O8.HANDLE hTemplateFile // 临时文件的句柄,通常为NULL9.);函数说明:如果调用成功,那么该函数返回文件的句柄,如果调用失败,则函数返回INVALID_HANDLE_VALUE。
例子:1.Handle m_hComm =CreateFile(com1,GENERIC_READ||GENERIC_WRITE,0,NULL,OPEN_EXISTIN G,FILE_FLAG_OVERLAPPED,0);CloseHandle();功能:关闭串口函数原型:1.BOOL CloseHandle(2.HANDLE hObject // handle to object to close3.)使用比较简单,其中参数hObject为需要关闭的串口句柄。
GetCommState()功能:获得串口状态函数原型:1.BOOL GetCommState(2.HANDLE hFile, // handle of communications device3.LPDCB lpDCB // address of device-control block structure4.);SetCommState()功能:设置串口状态1.BOOL SetCommState(2.HANDLE hFile, // handle of communications device3.LPDCB lpDCB // address of device-control block structure4.);函数说明:在打开通信设备句柄后,常常需要对串行口进行一些初始化工作。
这需要通过一个DCB结构来进行。
DCB结构包含了诸如波特率、每个字符的数据位数、奇偶校验和停止位数等信息。
在查询或配置置串行口的属性时,都要用DCB结构来作为缓冲区。
调用GetCommState函数可以获得串口的配置,该函数把当前配置填充到一个DCB结构中。
一般在用CreateFile打开串行口后,可以调用 GetCommState 函数来获取串行口的初始配置。
要修改串行口的配置,应该先修改DCB结构,然后再调用SetCommState函数用指定的 DCB结构来设置串行口。
举例:1.DCB dcb;2.memset(&dec,0,dizeof(dcb));3.if(!GetCommState(HComm,&dcb))//获取当前DCB配置4.return FALSE;5.dcb.BaudRate = CBR_9600;//修改数据传输率6.............7.if(SetCommState(hComm,&dcb))//设置新参数8....... //错误处理BuildCommDCB()功能:初始化DCB结构函数原型:1.BOOL BuildCommDCB(2.LPCTSTR lpDef, // pointer to device-control string3.LPDCB lpDCB // pointer to device-control block4.);示例:1.DCB dcb;2.memset(&dcb,0,sizeof(dcb));3.dcb.DCBlength = sizeof(dcb);4.if(!BuildCommDCb("9600,n,8,1",&dcb))//"baud=9600 parity=N data=8stop=1"5.{6....... //参数修改错误7.return FALSE;8.}9.else10.{11....... //己准备就绪12.}SetupComm()功能:设置I/O缓冲区的大小函数原型:1.BOOL SetupComm(2.HANDLE hFile, // handle to communications device3.DWORD dwInQueue, // size of input buffer4.DWORD dwOutQueue // size of output buffer5.);说明:除了在DCB中的设置外,程序一般还需要设置I/O缓冲区的大小和超时。
Windows用I/O缓冲区来暂存串行口输入和输出的数据,如果通信的速率较高,则应该设置较大的缓冲区。
调用SetupComm函数可以设置串行口的输入和输出缓冲区的大小。
先介绍一个结构:COMMTIMEOUTS1.typedef struct _COMMTIMEOUTS {2.DWORD ReadIntervalTimeout; // 读间隔超时3.DWORD ReadTotalTimeoutMultiplier; // 读时间系数4.DWORD ReadTotalTimeoutConstant; // 读时间常量5.DWORD WriteTotalTimeoutMultiplier; // 写时间系数6.DWORD WriteTotalTimeoutConstant; // 写时间常量7.} COMMTIMEOUTS,*LPCOMMTIMEOUTS;再介绍两个函数GetCommTimeouts功能:读取TimeOut的值函数原型:1.BOOL GetCommTimeouts(2.HANDLE hFile, // handle of communications device3.LPCOMMTIMEOUTS lpCommTimeouts // address of comm. time-outsstructure4.);SetCommTimeouts功能:设置TimeOUt的值函数原型:1.BOOL SetCommTimeouts(2.HANDLE hFile, // handle of communications device3.LPCOMMTIMEOUTS lpCommTimeouts // address of communicationstime-out structure4.);这里顺便介绍一下TimeOut机制的两个性质:超时函数说明:在用ReadFile和WriteFile读写串行口时,需要考虑超时问题。
如果在指定的时间内没有读出或写入指定数量的字符,那么ReadFile或 WriteFile的操作就会结束。
要查询当前的超时设置应调用GetCommTimeouts函数,该函数会填充一个COMMTIMEOUTS结构。
调用SetCommTimeouts可以用某一个COMMTIMEOUTS 结构的内容来设置超时。
有两种超时:间隔超时和总超时。
间隔超时是指在接收时两个字符之间的最大时延,总超时是指读写操作总共花费的最大时间。
写操作只支持总超时,而读操作两种超时均支持。
用COMMTIMEOUTS结构可以规定读/写操作的超时,该结构的定义为: COMMTIMEOUTS结构的成员都以毫秒为单位。
总超时的计算公式是:总超时=时间系数×要求读/写的字符数 + 时间常量例如,如果要读入10个字符,那么读操作的总超时的计算公式为:读总超时=ReadTotalTimeoutMultiplier×10 + ReadTotalTimeoutConstant可以看出,间隔超时和总超时的设置是不相关的,这可以方便通信程序灵活地设置各种超时。
如果所有写超时参数均为0,那么就不使用写超时。
如果ReadIntervalTimeout为0,那么就不使用读间隔超时,如果ReadTotalTimeoutMultiplier和ReadTotalTimeoutConstant都为0,则不使用读总超时。
如果读间隔超时被设置成MAXDWORD并且两个读总超时为0,那么在读一次输入缓冲区中的内容后读操作就立即完成,而不管是否读入了要求的字符。
在用重叠方式读写串行口时,虽然ReadFile和WriteFile在完成操作以前就可能返回,但超时仍然是起作用的。
在这种情况下,超时规定的是操作的完成时间,而不是ReadFile和WriteFile的返回时间。