STM32单片机定时器调试之方波输出
使用STM32的单个普通定时器产生4路不同频率的方波
使用STM32的单个普通定时器产生4路不同频率的方波STM32 的普通定时器有四路输出:TIMx_CH1、TIMx_CH2、TIMx_CH3和TIMx_CH4,可以使用输出比较的方法产生不同频率的方波输出,简单的方法是:1)设置计数器为向上计数模式,将自动重装载寄存器设置为0xFFFF;这样计数器会循环计数。
2)每个定时器通道设置为输出比较模式,并设置比较匹配时对应的输出管脚翻转输出。
3)按照输出波形的半波周期计算出一个数值称作Half_Cyc。
例如:定时器的时钟频率是72MHz,需要产生3456Hz 的方波,则Half_Cyc = 72M/(3456*2) = 41667;如需要产生200kHz 的方波,则Half_Cyc = 72M/(200k*2) = 180。
4)设置每个通道在输出比较匹配时产生中断,在中断中将比较寄存器的数值读出并加上Half_Cyc 的数值,如果计算出的数值超过16 位则舍弃超出的部分,再把这个新的数值写回相应的比较寄存器;这样下次比较成功将刚好发生在一个半波周期之后,对应的管脚将被翻转。
上述方法在要求频率不高时十分有效,但如果频率较高时会有频繁的中断产生,这时可以使用DMA 加以改善。
上述方法的基础是通过不断改变输出比较的匹配点进而产生管脚翻转输出,我们可以事先计算好这些比较匹配点,并通过DMA 在每次匹配时逐次更新比较寄存器的内容:方法一、使用两个DMA 缓冲区,在DMA 控制器操作一个缓冲区时,程序计算好另一个缓冲区的数据,然后在DMA 传输结束的中断处理中切换DMA 操作的缓冲区。
方法二、使用一个大的DMA 缓冲区,先计算好半个缓冲区的内容,启动DMA 为循环模式并设置它在DMA 传送一半和完成时均产生中断;启动DMA 后继续计算好另外半个缓冲区的内容,当发生DMA 中断时表示有一半缓冲区变空,这时在中断处理中计算好这半个缓冲区。
只要DMA 缓冲区开的足够大,方法二可以保证CPU 有充足的时间进行数据处理,并且保证不断地输出波形。
如何使用STM32单片机设置PWM输出

timInitStruct.TIM_Period=100;//这个值实际上就是TIMX-》ARR,延时开始时重新设定即可
TIM_TimeBaseInit(TIM3,
//设置PWM输出
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
如何使用STM32单片机设置PWM输出
环境:
主机:XP
开发环境:MDK4.23
MCU:STM32F103CBT6
说明:
使用内部8M晶振,倍频到64M供给TIM3定时器,PA6(通道1)上产生640K,50%方波
源代码:
初始化时钟:
//初始化RCC时钟
voidinit_rcc(void)
{
//将外设RCC寄存器重设为缺省值
//ADCCLK=PCLK2/8,1M
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
//PLL的时钟来源及倍频的倍数,此处设置为64MHz
RCC_PLLConfig(RCC_PLLSource_HSI_Div2,RCC_PLLMul_16);
//使能PLL
RCC_PLLCmd(ENABLE);
RCC_HCLKConfig(RCC_SYSCLK_Div1);
//设置SDIO的AHB时钟(HCLK2)(这时设置为=HCLK),64M
RCC_PCLK2Config(RCC_HCLK_Div1);
//设置APB1外设时钟(HCLK1)(这时设置为=HCLK/2),32M
RCC_PCLK1Config(RCC_HCLK_Div2);
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
用定时器触发dma写gpio方式实现方波输出

用定时器触发DMA写GPIO方式实现方波输出一、方波输出的原理和需求1. 方波输出是一种常见的信号输出方式,通常用于数字电路中的时钟信号或者数字通信中的数字信号传输。
2. 实现方波输出的方式有多种,其中一种常见的实现方式是使用定时器和DMA控制器来驱动GPIO输出口,通过定时器触发DMA传输实现方波输出的周期性变化。
二、定时器的设置1. 需要配置定时器的工作模式和计数周期,以确定方波输出的频率和占空比。
2. 定时器的工作模式通常设置为定时器模式或者脉冲模式,根据具体的需求来确定。
3. 计数周期的设定决定了方波输出的频率,通过修改定时器的重装载值或者分频系数来实现。
三、DMA的配置1. 接下来,需要配置DMA的工作模式和数据传输方向,将定时器的计数值传输到GPIO输出口。
2. 需要注意的是,要选择合适的DMA通道和传输模式,以确保数据的正常传输和输出。
四、GPIO的配置1. 需要配置GPIO输出口的工作模式和驱动能力,确保能够输出所需的方波信号。
2. 根据方波信号的特性,选择合适的GPIO输出模式和极性,以满足实际应用的需求。
五、定时器触发DMA传输1. 当定时器计数值达到设定的数值时,触发DMA传输,将计数值传输到GPIO输出口。
2. DMA控制器根据配置的传输方向和数据长度,将定时器的计数值传输到GPIO输出口,实现方波输出。
六、方波输出的优化1. 在实际应用中,需要根据具体的需求优化方波输出的参数,如频率、占空比、上升沿和下降沿的时间等。
2. 可以通过调整定时器和DMA的配置参数,以及GPIO输出口的驱动能力来实现方波输出的精确控制。
七、总结1. 通过定时器触发DMA写GPIO方式,可以实现方波输出,满足数字电路和数字通信中对方波信号的需求。
2. 在实际应用中,需要根据具体的需求和硬件条件来选择合适的方波输出方式,并进行参数优化和调整,以满足实际应用的要求。
为了深入探讨定时器触发DMA写GPIO方式实现方波输出的原理和实现过程,我们可以从以下几个方面进行详细的扩展:一、方波输出的原理和应用场景1. 方波输出作为一种常见的数字信号输出方式,在数字电路和通信系统中有着广泛的应用,比如用作时钟信号、数字通信信号、数模转换等。
关于单片机定时器输出方波问题分析
关于单片机定时器输出方波问题分析
在测量控制系统中,常常要求有一些实时时钟,以实现定时控制、定时测量或延时动作,也往往要求有计数器能对外部事件计数,如测电机转速、频率、工件个数等。
广泛用于个人家庭、学校、工厂等场所,是人们日常生活、工作中不可缺少的必需品。
实现定时,有软件、数字电路和可编程定时器3种主要方法。
可编程定时计数器是为方便微型计算机系统的设计和应用而研制的,它是硬件定时,又能很容易地通过软件来确定和改变它的定时值,通过初始化编程,能够满足各种不同的定时要求,因而在嵌入式系统的设计和应用中得到广泛的应用。
单片计算机即单片微型计算机,是集CPU、RAM、ROM、定时/计数和多种接口于一体的微控制器。
它体积小,成本低,功能强,广泛应用于智能产品和工业自动化。
而51单片机是各单片机中最为典型和最有代表性的一种。
方波是一种非正弦曲线的波形,通常会于电子和讯号处理时出现。
理想方波只有高和低这两个值。
电流的波形为矩形的电流即为方波电流。
不论。
使用STM32的定时器产生两路相位互为180度的PWM输出波形

④计数器继续向下计数,减到0时开始调头向上计数;当计数器的数值上升到TIMx_CC2时,CC2再次匹配成功,CC2的输出电平再次翻转;
如此循环,得到连续的相位互为180度的两路输出波形。
基本设置如下:
1)配置定时器的计数器为中间对齐计数,即先向上计数再向下计数。
2)在该定时器上选择2个通道,并分别配置为输出比较模式,并配置在比较成功时翻转对应的引脚输出。
3)配置自动重装载寄存器TIMx_ARR为要求输出频率的一半。
4)假定CC1为第一个输出信号的通道,再假定第一个信号的正脉冲宽度对应为W1,则配置TIMx_CCR1为TIMx_ARR-W1/2。
5) 同4),假定CC2为第二个输出信号的通道,正脉冲宽度对应为W2,配置TIMx_CCR2为W2/2。
----------------------------------------------
下面以一个例子说明:
假设要求输出的信号频率为10kHz,占空比为1:3。
再假设定时器的输入时钟为72MHz。
按照上述5),设置TIMx_CC2=W2/2=450
参照下图,图中红线表示计数器的数值变化:
①当计数器的数值从0向上计数,达到TIMx_CC1时,CC1匹配成功,CC1的输出电平翻转;
②计数器继续向上计数,达到TIMx_ARR时开始调头向下计数;当计数器的数值下降到TIMx_CC1时,CC1再次匹配成功,CC1的输出电平再次翻转;
输出信号的频率10kHz,换算为计数器的数值为7200。
按照上述电平时间W1,换算为计数器的数值为W1=7200/4=1800
基于寄存器操作的STM32高级定时器TIM1的四路PWM输出程序讲解
基于寄存器操作的STM32高级定时器TIM1的四路PWM输出程序讲解STM32高级定时器TIM1具有四个独立的PWM输出通道,可以用来控制四个不同的设备或驱动器。
在本篇文章中,我们将详细讲解如何使用寄存器操作实现TIM1的四路PWM输出。
首先,需要了解几个相关的概念。
STM32的定时器是通过寄存器进行配置和操作的,其中TIM1是高级定时器,具有更高级的功能和更多的寄存器。
PWM(脉冲宽度调制)是一种常见的控制技术,可实现模拟信号的数字化控制,通过调整高电平和低电平的时间比例来控制目标设备或驱动器的动作。
在开始编写程序之前,我们首先需要对TIM1进行初始化和配置。
以下是一个基本的初始化函数示例:```void TIM1_PWM_Init//开启TIM1的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//初始化TIM1的配置TIM_TimeBaseInitTypeDef TIM_BaseStruct;TIM_OCInitTypeDef TIM_OCStruct;TIM_BaseStruct.TIM_Prescaler = 0;TIM_BaseStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_BaseStruct.TIM_Period = 999; // 设置周期为1000TIM_BaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_BaseStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM1, &TIM_BaseStruct);//配置输出比较通道TIM_OCStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCStruct.TIM_Pulse = 0; // 设置脉冲宽度,0表示低电平TIM_OCStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM1, &TIM_OCStruct);TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC2Init(TIM1, &TIM_OCStruct);TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC3Init(TIM1, &TIM_OCStruct);TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC4Init(TIM1, &TIM_OCStruct);TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);//启动定时器TIM_Cmd(TIM1, ENABLE);```上述代码是一个初始化TIM1的函数示例,其中包含了基本的配置步骤。
STM32HAL库学习系列第4篇定时器TIM-----开始定时器与PWM输出配置
STM32HAL库学习系列第4篇定时器TIM-----开始定时器与PWM输出配置基本流程:1.配置定时器2.开启定时器3.动态改变pwm输出,改变值HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1);函数总结:1 __HAL_TIM_SET_COMPARE()// 是设置CCRx,⼀般是⽤在PWM输出的,控制PWM占空⽐2 __HAL_TIM_GET_COMPARE // 是⽤来读取CCRx的,⼀般⽤于捕获处理PWM输出配置:频率设置:1static void MX_TIM2_Init(void)2 {3 TIM_MasterConfigTypeDef sMasterConfig;4 TIM_IC_InitTypeDef sConfigIC;5 TIM_OC_InitTypeDef sConfigOC;6 htim2.Instance = TIM2;7 htim2.Init.Prescaler = (36-1); //实际时钟频率为 72M/36=2MHz /40000=50H,-----490HZ,改变观察电机输出状态定时器预分频器8 htim2.Init.CounterMode = TIM_COUNTERMODE_UP;9 htim2.Init.Period = (4082-1); //定时器周期配置 PWM频率为 490KHz 定义定时器周期,PWM频率为:168MHz/ (L298N_TIMx_PRESCALER+1)/ (L298N_TIM_PERIOD+1)10//⾼级定时器重复计数寄存器值11 **⾼级才有12// 定义⾼级定时器重复计数寄存器值13//实际PWM频率为:72MHz/(L298N_TIMx_PRESCALER+1)/(L298N_TIM_PERIOD+1)/(L298N_TIM_REPETITIONCOUNTER+1)14#define L298N_TIM_REPETITIONCOUNTER 015 **刹车和死区配置:1/* 刹车和死区时间配置 */2 sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;3 sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;4 sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;5 sBreakDeadTimeConfig.DeadTime = 0;6 sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;7 sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;8 sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;9 HAL_TIMEx_ConfigBreakDeadTime(&htimx_L298N, &sBreakDeadTimeConfig);基于通信的pwm频率和脉宽的更新控制算法:1/*2** pwm是否需要更新,⽐较上⼀次的频率和脉宽值,如果不同,则更新3*/4void pwm_update_loop( void )5 {6/*1,第⼀路判断: 频率或占空⽐发⽣变化 */7if( (HLM_SOKO_I_FREQ != HLM_SOKO_I_FREQ_LAST ) ||8 HLM_SOKO_I_DUTY != HLM_SOKO_I_DUTY_LAST )9 {10/* 更新频率和占空⽐的记录值 */11 HLM_SOKO_I_FREQ_LAST = HLM_SOKO_I_FREQ;12 HLM_SOKO_I_DUTY_LAST = HLM_SOKO_I_DUTY;13/* 更新当前通道的PWM波形 */14 pwm_update( PWM_I,HLM_SOKO_I_FREQ, HLM_SOKO_I_DUTY );15 }1617/*2,第⼆路判断 */18if( (HLM_SOKO_II_FREQ != HLM_SOKO_II_FREQ_LAST ) ||19 HLM_SOKO_II_DUTY != HLM_SOKO_II_DUTY_LAST )20 {21/* 更新频率和占空⽐的记录值 */22 HLM_SOKO_II_FREQ_LAST = HLM_SOKO_II_FREQ;23 HLM_SOKO_II_DUTY_LAST = HLM_SOKO_II_DUTY;24/* 更新当前通道的PWM波形 */25 pwm_update( PWM_II,HLM_SOKO_II_FREQ, HLM_SOKO_II_DUTY );26 }2728/*3,第三路判断 */29if( (HLM_SOKO_III_FREQ != HLM_SOKO_III_FREQ_LAST ) ||30 HLM_SOKO_III_DUTY != HLM_SOKO_III_DUTY_LAST )31 {32/* 更新频率和占空⽐的记录值 */33 HLM_SOKO_III_FREQ_LAST = HLM_SOKO_III_FREQ;34 HLM_SOKO_III_DUTY_LAST = HLM_SOKO_III_DUTY;35/* 更新当前通道的PWM波形 */36 pwm_update( PWM_III,HLM_SOKO_III_FREQ, HLM_SOKO_III_DUTY );37 }38 }补充:开起定时器功能只要在相应的定时器下开始内部时钟源即可使⽤定时器功能定时器内部动能:定时器时钟配置:M是10的6次⽅微秒是10的-6次⽅内部时钟设置为不分频(CKD),则CK_PSC的时钟频率等于APB1的时钟频率108MHz,即108000 000Hz。
STM32定时器PWM输出总结
STM32定时器PWM输出总结STM32是意法半导体(STMicroelectronics)公司推出的一系列32位微控制器(MCU)的产品,相较于传统的8位和16位MCU,STM32具有更强的处理能力和更多的外设资源。
其中,定时器是STM32系列MCU的重要外设之一,可以用于实现各种定时、计数和PWM输出等功能。
定时器是STM32系列MCU中一个非常重要的外设,可以提供一些基本的定时、计数和计时功能。
除了基本功能外,定时器还可以通过配置不同的工作模式、输入捕获和输出比较等功能来实现更多的应用。
在STM32中,每个定时器可以被划分为多个通道,每个通道可以配置为不同的工作模式。
其中,PWM输出功能通常使用定时器的输出比较模式来实现,通过配置不同的占空比来实现不同的PWM波形输出。
使用STM32定时器的PWM输出功能,一般需要进行以下步骤:1.选择合适的定时器和通道:在STM32系列MCU中,一般会有多个定时器可供选择,根据实际需求选择合适的定时器和通道。
2.配置定时器的工作模式:定时器的工作模式取决于具体的应用需求,可以选择定时模式、计数模式、输入捕获模式或者输出比较模式。
3.配置输出比较模式:输出比较模式是实现PWM输出的关键,通过配置不同的比较值和占空比来实现不同的PWM波形输出。
4.配置GPIO引脚:将定时器的输出引脚与GPIO引脚相连,实现PWM波形的输出。
使用STM32定时器的PWM输出功能,可以实现多种应用。
比如:-控制电机的转速和方向:通过调整PWM波形的占空比,可以控制电机的转速和方向。
-LED灯的亮度调节:通过调整PWM波形的占空比,可以实现LED灯的亮度调节。
-蜂鸣器的声音控制:通过调整PWM波形的频率,可以实现蜂鸣器的声音控制。
总结起来,STM32定时器的PWM输出功能是一种非常有用且灵活的功能,可以通过配置不同的定时器和通道,实现多种不同的应用。
通过控制输出比较模式和占空比,可以实现精确的PWM波形输出。
stm32定时器pwm输出原理
定时器PWM输出原理基于脉冲宽度调制模式(PWM),这是一种利用微处理器的数字输出来对模拟电路进行控制的有效技术。
在PWM模式下,除了CNT(计数器当前值)、ARR(自动重装载值)之外,还多了一个值CCRx(捕获/比较寄存器值)。
当CNT小于CCRx 时,TIMx_CHx通道输出低电平;当CNT等于或大于CCRx时,TIMx_CHx通道输出高电平。
因此,所谓脉冲宽度调制模式,就是可以产生一个由TIMx_ARR寄存器确定频率,由TIMx_CCRx寄存器确定占空比的信号。
例如,假设预分频时钟CK_PSC为100MHz,需要产生周期为1ms,占空比为47.5%的PWM信号。
可以通过设置PSC = 99,ARR = 999,Duty = 47.5%,则CRR = 475来实现。
另外,定时器的每个通道都可以输出PWM信号,对于同一个定时器而言,它的多个通道共享同一个自动重载寄存器,因此可以输出占空比不同,但周期相同的PWM信号。
在实际使用中,我们通常需要配置定时器输出通道、设置比较值以及使能预装载寄存器等步骤。
例如,对于定时器1,它的每一个输出通道都是成对的,即TIM1_CH1N与TIM1_CH1两个一组,用于驱动上下两个功率管。
STM32 频率可调方波
STM32 定时器产生四路频率可调的 PWM 波形
给定的的时间已经到
时。 当计数器与捕获/比较寄存器的内容相同时,输出比较功能做如下操作: ● 将输出比较模式(TIMx_CCMRx 寄存器中的 OCxM 位)和输出极性(TIMx_CCER 寄存器中的 CCxP 位)定义的值输出到对应的管脚上。在比较匹配时,输出管脚 可以保持它的电平(OCxM=000)、被设置成有效电平(OCxM=001)、被设置成无有 效电平(OCxM=010)或进行翻转(OCxM=011)。 ● 设置中断状态寄存器中的标志位(TIMx_SR 寄存器中的 CCxIF 位)。 ● 若设置了相应的中断屏蔽(TIMx_DIER 寄存器中的 CCXIE 位),则产生一个中 断。 ● 若设置了相应的使能位(TIMx_DIER 寄存器中的 CCxDE 位,TIMx_CR2 寄存器 中的 CCDS 位选择 DMA 请求功能),则产生一个 DMA 请求。
RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE); }
STM32之PWM波形输出配置总结
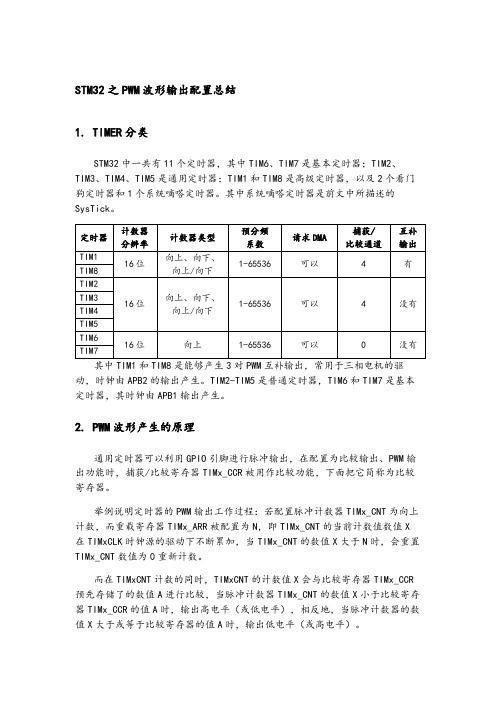
STM32之PWM波形输出配置总结1.TIMER分类STM32中一共有11个定时器,其中TIM6、TIM7是基本定时器;TIM2、TIM3、TIM4、TIM5是通用定时器;TIM1和TIM8是高级定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。
其中系统嘀嗒定时器是前文中所描述的SysTick。
其中TIM1和TIM8是能够产生3对PWM互补输出,常用于三相电机的驱动,时钟由APB2的输出产生。
TIM2-TIM5是普通定时器,TIM6和TIM7是基本定时器,其时钟由APB1输出产生。
2.PWM波形产生的原理通用定时器可以利用GPIO引脚进行脉冲输出,在配置为比较输出、PWM输出功能时,捕获/比较寄存器TIMx_CCR被用作比较功能,下面把它简称为比较寄存器。
举例说明定时器的PWM输出工作过程:若配置脉冲计数器TIMx_CNT为向上计数,而重载寄存器TIMx_ARR被配置为N,即TIMx_CNT的当前计数值数值X 在TIMxCLK时钟源的驱动下不断累加,当TIMx_CNT的数值X大于N时,会重置TIMx_CNT数值为0重新计数。
而在TIMxCNT计数的同时,TIMxCNT的计数值X会与比较寄存器TIMx_CCR 预先存储了的数值A进行比较,当脉冲计数器TIMx_CNT的数值X小于比较寄存器TIMx_CCR的值A时,输出高电平(或低电平),相反地,当脉冲计数器的数值X大于或等于比较寄存器的值A时,输出低电平(或高电平)。
如此循环,得到的输出脉冲周期就为重载寄存器TIMx_ARR存储的数值(N+1)乘以触发脉冲的时钟周期,其脉冲宽度则为比较寄存器TIMx_CCR的值A 乘以触发脉冲的时钟周期,即输出PWM的占空比为 A/(N+1) 。
3.STM32产生PWM的配置方法1)配置GPIO口不是每一个IO引脚都可以直接使用于PWM输出,下面是定时器的引脚重映像,其实就是引脚的复用功能选择:表3-1 定时器1的引脚复用功能映像表3-2 定时器2的引脚复用功能映像表3-3 定时器3的引脚复用功能映像表3-4 定时器4的引脚复用功能映像根据以上重映像表,我们使用定时器3的通道2作为PWM的输出引脚,所以需要对PB5引脚进行配置,对IO口操作代码:2)初始化定时器3)设置TIM3_CH2的PWM模式、使能TIM3的CH2输出4)使能定时器3经过以上的操作,定时器3的第二通道已经可以正常工作并输出PWM波了,只是其占空比和频率都是固定的,我们可以通过改变TIM3_CCR2,则可以控制它的占空比。
STM32(7)——通用定时器PWM输出

STM32(7)——通⽤定时器PWM输出脉冲宽度调制(PWM),是英⽂“Pulse Width Modulation”的缩写,简称脉宽调制,是利⽤微处理器的数字输出来对模拟电路进⾏控制的⼀种⾮常有效的技术。
简单⼀点,就是对脉冲宽度的控制。
⼀般⽤来控制步进电机的速度等等。
STM32的定时器除了TIM6和TIM7之外,其他的定时器都可以⽤来产⽣PWM输出,其中⾼级定时器TIM1和TIM8可以同时产⽣7路的PWM输出,⽽通⽤定时器也能同时产⽣4路的PWM输出。
STM32的PWM输出有两种模式,模式1和模式2,由TIMx_CCMRx寄存器中的OCxM位确定的(“110”为模式1,“111”为模式2)。
模式1和模式2的区别如下:110:PWM模式1-在向上计数时,⼀旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为⽆效电平;在向下计数时,⼀旦TIMx_CNT>TIMx_CCR1时通道1为⽆效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
111:PWM模式2-在向上计数时,⼀旦TIMx_CNT<TIMx_CCR1时通道1为⽆效电平,否则为有效电平;在向下计数时,⼀旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为⽆效电平。
由此看来,模式1和模式2正好互补,互为相反,所以在运⽤起来差别也并不太⼤。
⽽从计数模式上来看,PWM也和TIMx在作定时器时⼀样,也有向上计数模式、向下计数模式和中⼼对齐模式,关于3种模式的具体资料,可以查看《STM32参考⼿册》的“14.3.9 PWM模式”⼀节,在此就不详细赘述了。
PWM的输出管脚是确定好的,具体的引脚功能可以查看《STM32参考⼿册》的“8.3.7 定时器复⽤功能重映射”⼀节。
在此需要强调的是,不同的TIMx有分配不同的引脚,但是考虑到管脚复⽤功能,STM32提出了⼀个重映像的概念,就是说通过设置某⼀些相关的寄存器,来使得在其他⾮原始指定的管脚上也能输出PWM。
用定时器触发dma写gpio方式实现方波输出 -回复

用定时器触发dma写gpio方式实现方波输出-回复使用定时器触发DMA写GPIO的方式实现方波输出引言:在嵌入式系统开发中,输出方波是一项常见的需求,方波信号广泛应用于数字信号传输、时序信号生成、通信协议等领域。
本文将介绍一种使用定时器触发DMA写GPIO的方式实现方波输出的方法,通过对相关原理及实现步骤的详细介绍,帮助读者理解该方法的原理和具体实现步骤。
第一部分:方波输出原理及相关概念介绍(300-500字)1. 方波是一种特殊形式的周期性信号,其特点是在一个周期内,信号先上升到高电平,然后下降到低电平,周期重复。
2. 方波信号常用于时序信号生成、通信协议等方面,具有周期性强、方便识别、传输速率较高等优点。
3. 在嵌入式系统中,实现方波输出可以使用多种方法,例如使用定时器、PWM(脉冲宽度调制)等技术。
4. DMA(Direct Memory Access,直接内存访问)是指无需CPU 干预,通过DMA控制器将数据从一个设备(如外设)直接传送到另一个设备或内存的技术。
第二部分:使用定时器触发DMA写GPIO实现方波输出的原理(500-800字)1. 在嵌入式系统中,使用定时器来触发DMA传输数据是一种高效的方式,可以实现定时、周期性的数据传输。
2. 定时器可以设置一个计时器的初始值和计时器的重载值,通过不断减小计时器的值来实现定时的效果。
3. GPIO(General Purpose Input/Output,通用输入/输出)是嵌入式系统中常用的外设之一,可以通过控制GPIO引脚的电平来实现方波输出。
4. 实现方波输出的具体步骤如下:a. 配置定时器:选择一个合适的定时器,设置定时器的计时频率和重载值,以确定方波的频率和占空比。
b. 配置DMA:选择一个合适的DMA通道,并设置相关的传输参数,包括源地址、目的地址、传输长度等。
c. 配置GPIO:选择一个GPIO引脚作为输出端口,并设置为输出模式。
STM32 频率可调方波
设置的原理 利用改变定时器输出比较通道的捕获值,当输出通道捕获值产生中断时,
在中断中将捕获值改变,这时, 输出的 I/O 会产生一个电平翻转,利用这种办 法,实现不同频率的 PWM 输出。(这句话也同时解释了为什么要设置 period 的周 期为65536,就是为了使波形的占空比一直保持为50%) 一、基本概念理解
/* Output Compare Toggle Mode configuration: Channel2 */ TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_Pulse = CCR2_Val; TIM_OC2Init(TIM3, &TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Disable); //失能预装载寄存器
/* TIM3_CH1 toggling with frequency = 183.1 Hz */ if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET) //捕获比较 1 中断源 {
TIM_ClearITPendingBit(TIM3, TIM_IT_CC1 ); capture = TIM_GetCapture1(TIM3); //获得 TIM3 输入捕获 1 的值 TIM_SetCompare1(TIM3, capture + CCR1_Val ); //设置捕获比较寄存器 1 的值 } /* TIM3_CH2 toggling with frequency = 366.2 Hz */ if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET) { TIM_ClearITPendingBit(TIM3, TIM_IT_CC2); capture = TIM_GetCapture2(TIM3); TIM_SetCompare2(TIM3, capture + CCR2_Val); } /* TIM3_CH3 toggling with frequency = 732.4 Hz */ if (TIM_GetITStatus(TIM3, TIM_IT_CC3) != RESET) { TIM_ClearITPendingBit(TIM3, TIM_IT_CC3); capture = TIM_GetCapture3(TIM3); TIM_SetCompare3(TIM3, capture + CCR3_Val); } /* TIM3_CH4 toggling with frequency = 1464.8 Hz */ if (TIM_GetITStatus(TIM3, TIM_IT_CC4) != RESET) { TIM_ClearITPendingBit(TIM3, TIM_IT_CC4); capture = TIM_GetCapture4(TIM3); TIM_SetCompare4(TIM3, capture + CCR4_Val); }
STM32配置DAC输出固定电压和方波

STM32配置DAC输出固定电压和方波STM32F103VCT6自带两个12位DAC,DAC的转换速度一直没有查到,网上有人说是1MHZ的频率,那就是1us了。
ADC的转换时间在56MHZ 工作频率下为1us,在72MHZ工作频率下为1.17us。
如果AD和DA有对称关系的话,那么很可能跟ADC的时间相同。
(仅作分析用!)DAC于我,有两个用途:输出波形和输出固定电压。
先来说说前者的配置。
第一个参数:触发方式,DAC_InitStructure.DAC_Trigger。
可选的外部触发源一共有八个。
六个是定时器触发:TIM2,TIM4,TIM5,TIM6,TIM7和TIM8。
剩下两个分别是:EXTI线路9和软件触发。
如果采用定时器触发的话,就还要再编写相应的定时器函数,这个倒不是很复杂,和定时器的编写方式类似。
如:DAC_InitStructure.DAC_Trigger =DAC_Trigger_T6_TRGO;//选择定时器6作外部触发源void TIM_Configuration(void){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);TIM_TimeBaseStructure.TIM_Period = 0x85;TIM_TimeBaseStructure.TIM_Prescaler = 0x0;TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;TIM_TimeBaseStructure.TIM_CounterMode =TIM_CounterMode_Up;TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure);TIM_SelectOutputTrigger(TIM6, TIM_TRGOSource_Update);}输出信号频率计算:假设输出一个6个点的锯齿波波形,则其频率为:(72MHZ/(0x85+1))*6=89.552KHZ.注意:如果prescaler不为0,则时钟还要再除以(prescaler+1)第二个参数:DAC_InitStructure.DAC_WaveGeneration。
关于STM32输出高低电平分别为5V,0V的方波

关于STM32输出⾼低电平分别为5V,0V的⽅波1.⾸先要配置为开漏输出。
⽽⼀般的IO输出模式推挽输出不可以。
因为 推挽输出:可以输出⾼,低电平,连接数字器件;推挽结构⼀般是指两个三极管分别受两互补信号的控制,总是在⼀个三极管导通的时候另⼀个截⽌。
⾼低电平由IC的电源低定。
开漏输出:输出端相当于三极管的集电极。
要得到⾼电平状态需要上拉电阻才⾏,适合于做电流型的驱动,其吸收电流的能⼒相对强(⼀般20mA以内)。
GPIO_Mode_Out_OD 开漏输出---IO输出0接GND,IO输出1,悬空,需要外接上拉电阻,才能实现输出⾼电平。
当输出为1时,IO⼝的状态由上拉电阻拉⾼电平,但由于是开漏输出模式,这样IO⼝也就可以由外部电路改变为低电平或不变。
可以读IO输⼊电平变化,实现C51的IO双向功能。
GPIO_Mode_Out_PP 推挽输出---IO输出0-接GND,IO输出1 -接VCC,读输⼊值是未知的。
1) 推挽输出 可以输出⾼、低电平,连接数字器件;推挽结构⼀般是指两个三极管分别受两个互补信号的控制,总是在⼀个三极管导通的时候另⼀个截⽌。
⾼低电平由IC的电源决定。
推挽电路是两个参数相同的三极管或MOSFET,以推挽⽅式存在于电路中,各负责正负半周的波形放⼤任务,电路⼯作时,两只对称的功率开关管每次只有⼀个导通,所以导通损耗⼩、效率⾼。
输出既可以向负载灌电流,也可以从负载抽取电流。
推拉式输出级既提⾼电路的负载能⼒,⼜提⾼开关速度。
2) 开漏输出 输出端相当于三极管的集电极,要得到⾼电平状态需要上拉电阻才⾏。
适合于做电流型的驱动,其吸收电流的能⼒相对强(⼀般20mA以内)。
开漏形式的电路有以下⼏个特点: 1、利⽤外部电路的驱动能⼒,减少IC内部的驱动。
当IC内部MOSFET导通时,驱动电流是从外部的VCC流经上拉电阻、MOSFET到GND。
IC内部仅需很⼩的栅极驱动电流。
2、⼀般来说,开漏是⽤来连接不同电平的器件,匹配电平⽤的,因为开漏引脚不连接外部的上拉电阻时,只能输出低电平,如果需要同时具备输出⾼电平的功能,则需要接上拉电阻,很好的⼀个优点是通过改变上拉电源的电压,便可以改变传输电平。
课件:第3次课 STM32调试,延时程序,GPIO输出模式
J-link作为一款调试ARM CPU的调试设备,典型型号:V8、V9
20与4
JTAG和SWD的特点与区别
到底在哪里呢?
6
STM32程序的烧写
——基于JTAG(SWD)的程序下载
► 基于JTAG ► 基于SWD
19
STM32的三种延时实现
SysTick定时器是如何工作的?有例有真相,举例说明吧!
/* 微秒级精确延时函数 */ void Delay_us(uint32_t n) //延时多少微秒,n就输入多少! {
SysTick->LOAD=72*n; //初值,因为时钟72M,72次即1μs SysTick->CTRL=0x00000005; 5=101 //时钟来源设为为HCLK(72M),打开定时器 while(!(SysTick->CTRL&0x00010000)); //等待计数到0 SysTick->CTRL=0x00000004;//关闭定时器 SysTick->VAL =0X00; //清空计数器,必须 }
结合GPIO的输出应用范例程序,讨论三种方法:
▃ 延时函数法——精度不高,实现方便 ▃ SysTick定时器延时——精度高,不占用资源 ▃ 定时器中断延时——精度高,占用定时器资源
一个LED闪烁, 闪烁即一亮 一灭,周期
重点学习两个问题——
由延时实现
● 延时的实现方法
● GPIO的输出应用
在这部分讨论中,重点讨论实现思想,具体程序请参阅教材
GPIO_SetBits库函数、GPIO_ResetBits库函数 它们的用法掌握了?
STM32定时器控制方波
void TIM2_Configuration(u16 T);
void TIM3_Configuration(void);
/* Private functions ---------------------------------------------------------*/
/* PLLCLK = 8MHz * 9 = 72 MHz */
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
/* Enable PLL */
RCC_PLLCmd(ENABLE);
/* Wait till PLL is ready */
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)
HSEStartUpStatus = RCC_WaitForHSEStartUp();
if(HSEStartUpStatus == SUCCESS)
{
/* HCLK = SYSCLK */
RCC_HCLKConfig(RCC_SYSCLK_Div1);
/* PCLK2 = HCLK */
RCC_PCLK2Config(RCC_HCLK_Div1);
/* PCLK1 = HCLK/2 */
RCC_PCLK1Config(RCC_HCLK_Div2);
/* Flash 2 wait state */
FLASH_SetLatency(FLASH_Latency_2);
/* Enable Prefetch Buffer */
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32单片机定时器调试之方波输出
今天试着让STM32的定时器输出50%占空比信号,按
照例程写了一下方波初始化函数,例程用的是STM32自
带库函数,由于嫌麻烦,我又自己写了一个简单的,采
用定时器1进行输出。
结果一上来,没反应,修改了很
多参数,还是没反应,然后将开发板例程写进芯片后,
有反应,仔细越多数据手册,没有问题,纠结一上午,
中午吃饭。
吃完饭后,下午又开始试验,还是别人程序
有反映,自己程序,没反应。
再看了看,开发板程序使
用的是TIM3,而我使用的是TIM1,于是又把我的程序将TIM1换成TIM3,点击调试运行,有反应。
不会是高级
定时器只能干高级的任务吧,像输出方波这么简单的低
级任务他不惜的干?郁闷了半天。
后来通过在网上查找,这个程序
以下为源代码,CC1进行比较输出,模式为翻转电平.
程序运行后,CC中断可以进去,PA.11的指示灯能闪,
但PA.08的指示一直为低电平,请教一下程序哪里错了??? void TIM1_CC_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能定时器 TIM1_CC 中断 */
NVIC_InitStructure.NVIC_IRQChannel =
TIM1_CC_IRQChannel;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPrior ity = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);
/* 配置 PA.11 为推挽输出 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIOA->;BSRR = GPIO_Pin_11; // 将PA.08配置为高电平
/* 配置 PA.08 为复用推挽输出 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 预分频自动重载寄存器 */
TIM1->;ARR
= 0x2FFF;
/* PSC 预分频器:计数频率 = CK_PSC /(PSC + 1) */ TIM1->;PSC
= 0xFF;
/* CCR1 捕获比较值寄存器 */
TIM1->;CCR1 = 0xFFF;
/* 循环计数器的寄存器(控制更新事件) */
TIM1->;RCR
= 0x00;
// 每次更新
/* 捕获/比较模式寄存器 */
TIM1->;CCMR1 = 0x30;
// CC1为输出,CCR1立即生效,输出翻转.
/* 捕获/比较使能寄存器 */
TIM1->;CCER = 0x03;
// 开启CC1输出,反向输出
/* 中断使能寄存器 */
TIM1->;DIER = 0x02;
// 使能 CC1 中断
/* 控制寄存器1 */
TIM1->;CR1
= 0x01;
// 使能计数器(向上计数)
}
/************************************************ ***************************************
** 函数名称: TIM1_CC_IRQHandler
** 功能描述: CC 中断
** 参
数: None
** 返回值: None
************************************************* ***************************************/
void TIM1_CC_IRQHandler(void)
{
static uint32 counter = 0;
TIM1->;SR &= ~2; // 清除中断标志(不做判断提高效率)
if(counter)
{
counter = 0;
GPIOA->;BSRR = GPIO_Pin_11;
}
else
{
counter = 1;
GPIOA->;BRR = GPIO_Pin_11;
}
}
最后找到问题,没有打开主输出...
/* 打断和死区控制器 */
TIM1->;BDTR = 0x8000; // 主输出使能(MOE)
加这句就可以了.
得知,高级定时器就是高级定时器,由于加入了刹车和
死区,所以想输出波形,必须要比普通定时器多一句
“TIM1->;BDTR = 0x8000;” 开启主输出使能,通道输出和这个必须同时开启,若出现刹车信号,则一
次将4路输出全部关闭。
以保证设备能够正常运行。
哎!悲催呀,纠结了一上午。
stm32定时器还真是复杂,尤
其是高级定时器。
设计者真是了不起,还要感谢这位仁
兄,要不是他我恐怕还得多弄几天。