MATLAB求解线性规划问题ppt课件
数学建模MATLAB之线性规划PPT课件
足条件的情况下使总加工费最小为13800.
第15页/共45页
例2 问题二的解答 问题
改写为:
m z 4 i 3 0 n x x 1 2 6 s . t . 5 3 x x 1 2 ( 4 )5
能力增减不影响利润 4)
SLACK OR SURPLUS
0.000000 0.000000 40.000000
REDUCED COST
X1
20.000000
X2
30.000000
ROW SLACK OR SURPLUS DUAL PRICES
NO. ITERATIONS= 2
reduced cost 值 表示当该非基变 量增加一个单位 时(其他非基变 量保持不变),目 标函数减少的量 (对max型问题) .
解 编写M文件如下:
c=[-0.4 -0.28 -0.32 -0.72 -0.64 -0.6];
A=[0.01 0.01 0.01 0.03 0.03 0.03;0.02 0 0 0.05 0 0;0 0.02 0 0 0.05 0;0 0 0.03 0 0 0.08];
b=[850;700;100;900];
的整数规划应用专门的方法求解.
第18页/共45页
返回
用LINDO、LINGO优化工具箱解线性规划
第19页/共45页
一、LINDO软件包
下面我们通过一个例题来说明LINDO 软件包的使用方法.
第20页/共45页
LINDO和LINGO软件能求解的优化模型
连续优化
优化模型 整数规划(IP)
MATLAB求解线性规划(含整数规划和01规划)问题
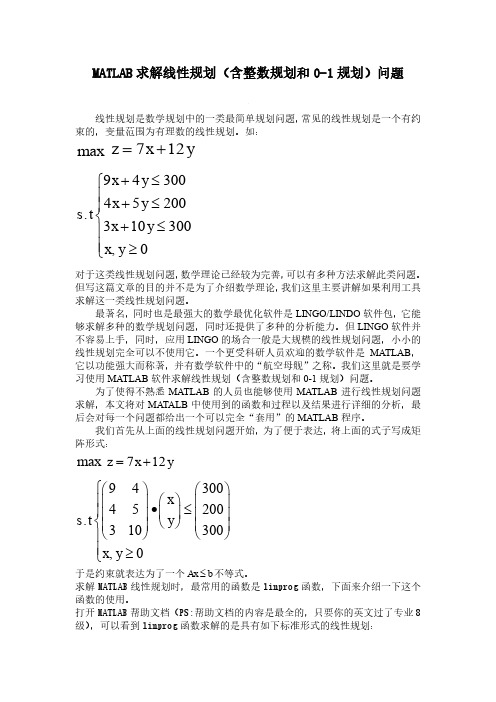
MATLAB 求解线性规划(含整数规划和0-1规划)问题线性规划是数学规划中的一类最简单规划问题,常见的线性规划是一个有约束的,变量范围为有理数的线性规划。
如:max 712z x y =+9430045200s.t 310300,0x y x y x y x y +≤⎧⎪+≤⎪⎨+≤⎪⎪≥⎩对于这类线性规划问题,数学理论已经较为完善,可以有多种方法求解此类问题。
但写这篇文章的目的并不是为了介绍数学理论,我们这里主要讲解如果利用工具求解这一类线性规划问题。
最著名,同时也是最强大的数学最优化软件是LINGO/LINDO 软件包,它能够求解多种的数学规划问题,同时还提供了多种的分析能力。
但LINGO 软件并不容易上手,同时,应用LINGO 的场合一般是大规模的线性规划问题,小小的线性规划完全可以不使用它。
一个更受科研人员欢迎的数学软件是MATLAB ,它以功能强大而称著,并有数学软件中的“航空母舰”之称。
我们这里就是要学习使用MATLAB 软件求解线性规划(含整数规划和0-1规划)问题。
为了使得不熟悉MATLAB 的人员也能够使用MATLAB 进行线性规划问题求解,本文将对MATALB 中使用到的函数和过程以及结果进行详细的分析,最后会对每一个问题都给出一个可以完全“套用”的MATLAB 程序。
我们首先从上面的线性规划问题开始,为了便于表达,将上面的式子写成矩阵形式:max 712z x y =+9430045200s.t 310300,0x y x y ⎧⎛⎫⎛⎫⎛⎫⎪ ⎪ ⎪∙≤⎪ ⎪ ⎪ ⎪⎨⎝⎭ ⎪ ⎪⎝⎭⎝⎭⎪⎪≥⎩于是约束就表达为了一个Ax b ≤不等式。
求解MATLAB 线性规划时,最常用的函数是linprog 函数,下面来介绍一下这个函数的使用。
打开MATLAB 帮助文档(PS:帮助文档的内容是最全的,只要你的英文过了专业8级),可以看到linprog 函数求解的是具有如下标准形式的线性规划:min .Tx f x A X b s t Aeq X beq lb x ub ≤⎧⎪=⎨⎪≤≤⎩公式中各符号的意义是自明的,在这里简单介绍下,首先MATLAB 中求解的是目标函数是最小值的问题,但如果我们的目标函数是求最大值,可以通过对目标函数中每一项中乘以-1,将求最大值问题转化为求最小值问题;A ,b 分别为不等式约束中的系数矩阵。
MATLAB求解线性规划问题

min
f 3x1 x 2 x3
2x1 x3 1
s.t.
x1 2x 2 x3 11 4x1 x 2 2x3 3
xi 0, i 1,2,3
然后建立M文件如下:
c=[-3;1;1];A=[1 -2 1;4 -1 -2];b=[11;-3]; aeq=[2 0 -1];beq=-1;vlb=[0;0;0]; [x,fval]=linprog(c,A,b,aeq,beq,vlb)
最后的结果为: - 6.2043e-016
【例 5】 求解约束非线性规划:
min (x1 1)2 (x2 2)2 (x3 3)2 (x4 4)2 x1 x2 x3 x4 5
s.t. 3x1 3x2 2x3 x4 10 xi 0
初值为[1;1;1;1]
解:首先建立一个m文件 fun705.m
【例 4】 求解约束非线性规划:
max ex1 x22 (3 ex1 x22 )
s.t. ex1 x22 3
(初值为[1;1])
首先将问题转化为matlab要求的格式;即求出 fun,A,b,Aeq,Beq,X0,Lb,Ub
解:首先建立一个m文件fun7041.m function y=fun7041(x) y=-exp(x(1))*x(2)^2*(3-exp(x(1))-x(2)^2); 存储为fun7041.m
1、了解约束非线性规划问题的求解原理与方法; 2、会用Matlab软件求解约束非线性规划问题。
二、实验原理和方法
对于约束非线性规划,随着目标函数和约束条件的不同, 解法也不同,一般来说,有两类方法: (1)、将约束问题化为无约束问题的求解方法; (2)、用线性规划来逼近非线性规划;
三、实验内容与步骤
用matlab求解线性规划问题
用m a t l a b求解线性规划问题(共3页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--实验四 用MATLAB 求解线性规划问题一、实验目的:了解Matlab 的优化工具箱,能利用Matlab 求解线性规划问题。
二、实验内容:线性规划的数学模型有各种不同的形式,其一般形式可以写为:目标函数: n n x f x f x f z +++= 2211min约束条件: s n sn s s n n b x a x a x a b x a x a x a ≤+++≤+++221111212111s n tn t t n n d x c x c x c d x c x c x c =+++=+++2211112121110,,,21≥n x x x这里n n x f x f x f z +++= 2211称为目标函数,j f 称为价值系数,T n f f f f ),,,(21 =称为价值向量,j x 为求解的变量,由系数ij a 组成的矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=mn m n a a a a A 1111称为不等式约束矩阵,由系数ij c 组成的矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=sn s n c c c c C 1111 称为等式约束矩阵,列向量T n b b b b ),,,(21 =和T n d d d d ),,,(21 =为右端向量,条件0≥j x 称为非负约束。
一个向量T n x x x x ),,,(21 =,满足约束条件,称为可行解或可行点,所有可行点的集合称为可行区域,达到目标函数值最大的可行解称为该线性规划的最优解,相应的目标函数值称为最优目标函数值,简称最优值。
我们这里介绍利用Matlab 来求解线性规划问题的求解。
在Matlab 中有一个专门的函数linprog()来解决这类问题,我们知道,极值有最大和最小两种,但求z 的极大就是求z -的极小,因此在Matlab 中以求极小为标准形式,函数linprog()的具体格式如下:X=linprog(f,A,b)[X,fval,exitflag,ouyput,lamnda]=linprog(f,A,b,Aeq,Beq,LB,UB,X0,options)这里X 是问题的解向量,f 是由目标函数的系数构成的向量,A 是一个矩阵,b 是一个向量,A ,b 和变量x={x1,x2,…,xn}一起,表示了线性规划中不等式约束条件,A ,b 是系数矩阵和右端向量。
课件:应用LINGO、MATLAB软件求解线性规划(1)
0.6166667
X4 30.00000
0.000000
X5 10.00000
0.000000
Row Slack or Surplus Dual Price
1 22.40000
-1.000000
2 0.000000
-0.5833333
3 4.100000
0.000000
4 0.000000
-4.166667
4.6667 0.0000 0.6667 z= -8.6667
例1.4 用MATLAB求解线性规划问题
max z 2x1 3x2 5x3
s.t.
2
x1 x1
x2 x3 7 5x2 x3 10
xi 0,i 1, 2,3
解 首先转化为求最小值问题
min z S 2x1 3x2 5x3
5 0.000000
0.8833333
1.2 应用MATLAB求解线性规划
• MATLAB(MATrix LABoratory)的基本含义是矩阵实验 室,它是由美国MathWorks公司研制开发的一套高性能的 集数值计算、信息处理、图形显示等于一体的可视化数学 工具软件。它是建立在向量、数组和矩阵基础之上的,除 了基本的数值计算、数据处理、图形显示等功能之外,还 包含功能强大的多个“工具箱”,如优化工具箱( optimization toolbox)、统计工具箱、样条函数工具箱和 数据拟合工具箱等都是优化计算的有力工具。在这里仅介 绍用MATLAB6.5优化工具箱求解线性规划问题。
即约束条件左边与右边的差值,对于“ ”的不等式,右边减
左边的差值为Slack(松弛),对于“ ”的不等式,左边减
的右边差值为Surplus(剩余),当约束条件两边相等时,松 弛或剩余的值等于零。
matlab经济管理建模PPT第8章-线性规划模型基础
8.2 线性规划函数linprog
输出参数:
x:最优方案(或者迭代结束时的方案),不可缺省输出变量
fval:最优值(或者迭代结束时的目标值),不可缺省输出变量
exitflag:迭代停止标识
1:算法收敛于解x,x是线性规划的最优解;
0:算法达到最大迭代次数,x不一定是线性规划最优解;
Aeq(i,j)=1
end
end
beq=[150;225;100;250;120;150]
lb=[0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0;0]
[x,z]=linprog(c,A,b,Aeq,beq,lb)
Optimization terminated.
x = 150,0,0,0,225,0,0,100,0,0,25,225,120,0,0,0,0,150
A:不等式约束系数矩阵,不可缺省输入变量
b:不等式约束限制向量,不可缺省输入变量
Aeq:等式约束系数矩阵
beq:等式约束限制向量
lb:决策变量x的可行域下界
ub:决策变量x的可行域上界
x0:决策变量初始值。单纯形法不需要初始点。
4
8.2 线性规划函数linprog
5
options:优化参数设置项,可以通过optimset函数设置或改变这些参数,如表8.1所示。其调
8.6 影子价格
16
课堂实验1补充-最优生产计划问题各资源的影子价格
在命令行中输入命令,可以得到相应的输出结果和分析,如表所示。
>> c=[-40;-30];A=[4 1;2 1;1 1];b=[90;50;40];lb=[0;0];ub=[];
Matlab求解线性规划和整数规划问题

1.线性规划问题:min f*xs.t. A*x<=bAeq*x=beqlb<=x<=ub其中:A为不等式约束的系数矩阵,Aeq表示等式约束的系数矩阵,b表示不等式约束的常向量,beq表示等式约束的常向量,lb和ub表示自变量的上下范围。
求解函数:linprog(f,A,b,Aeq,beq,lb,ub)其中:f,A,b ,Aeq,beq,lb,ub的定义如上。
2.整数规划问题:利用函数(linprog)先把BranchBound函数存在matlab的路径下,BranchBound函数的内容如下:function [y,fval]=BranchBound(c,A,b,Aeq,beq)NL=length(c);UB=inf;LB=-inf;FN=[0];AA(1)={A};BB(1)={b};k=0;flag=0;while flag==0;[x,fval,exitFlag]=linprog(c,A,b,Aeq,beq);if (exitFlag == -2) | (fval >= UB)FN(1)=[];if isempty(FN)==1flag=1;elsek=FN(1);A=AA{k};b=BB{k};endelsefor i=1:NLif abs(x(i)-round(x(i)))>1e-7kk=FN(end);FN=[FN,kk+1,kk+2];temp_A=zeros(1,NL);temp_A(i)=1;temp_A1=[A;temp_A];AA(kk+1)={temp_A1};b1=[b;fix(x(i))];BB(kk+1)={b1};temp_A2=[A;-temp_A];AA(kk+2)={temp_A2};b2=[b;-(fix(x(i))+1)];BB(kk+2)={b2};FN(1)=[];k=FN(1);A=AA{k};b=BB{k};break;endendif (i==NL) & (abs(x(i)-round(x(i)))<=1e-7)UB=fval;y=x;FN(1)=[];if isempty(FN)==1flag=1;elsek=FN(1);A=AA{k};b=BB{k};endendendendy=round(y);fval=c*y;再利用命令[y,fval]=BranchBound(c,A,b,Aeq,beq)即可。
10.应用MATLAB软件求解线性规划

1 1
x1, x2 0
min S x1 x2
(5)
s.t. x1x13xx22
2 1题
max
min
m
ai1xi ,
m
ai2 xi ,L
,
m
ain xi
i 1
i 1
i 1
s.t.
x1 xi
x2 0,
L xm i 1, 2,L
1 ,m
5.如果x(1),x(2), ,x(k)都是线性规划问题(LP):
max S cx, Ax b, x o
的可行解,则它们的任意凸组合也是(LP)的可行解;如果x(1),x(2),
(2)
s.t
x1 2 x1
x2 2 x2
x3 x3
10 20
x1, x2 , x3 0
max S 14x1 13x2 6x3
2x1 4x2 x3 60
应用MATLAB软件求解 线性规划
• MATLAB(MATrix LABoratory)的基本含义是矩阵实验室 ,它是由美国MathWorks公司研制开发的一套高性能的集数 值计算、信息处理、图形显示等于一体的可视化数学工具软 件。它是建立在向量、数组和矩阵基础之上的,除了基本的 数值计算、数据处理、图形显示等功能之外,还包含功能强 大的多个“工具箱”,如优化工具箱(optimization toolbox) 、统计工具箱、样条函数工具箱和数据拟合工具箱等都是优 化计算的有力工具。在这里仅介绍用MATLAB6.5优化工具箱 求解线性规划问题。
烟酸(mg)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、了解无约束规划问题的求解原理与方法 ; 2、会用Matlab软件求解无约束规划问题。
二、实验原理和方法
无约束规划问题的解法一般按目标函数的形式分为两大类: 一类是一元函数的一维搜索法,如黄金分割法、插值法等; 另一类是求解多元函数的下降迭代法。
11
迭代的基本思想和步骤大致可分为以下四步:
然后建立函数文件fun703.m
function f fun703(x) f (x(1)^2 x(2) 1)^2 ((x(1) 2)^2
(x(2) 0.5)^2 1)^2
16
在命令窗口输入: x0=[0;0]; x=fminunc(‘fun703’,x0)
Matlab程序: ch701.m
9
以ch701作为文件名保存此M文件后,在命令窗口 输入ch701后即可得到结果:
x = 4.0000 1.0000 9.0000
同时返回fval=-2
对应到原来的线性规划中即知目标函数的最大值为2,此时 x1=4,x2=1,x3=9。
10
第二节 无约束规划计算方法
min
f cTx
s.t.
Ax b, x 0
3
线性规划的可行解是满足约束条件的解;线性规划 的最优解是使目标函数达到最优的可行解。 线性规划关于解的情况可以是: 1、无可行解,即不存在满足约束条件的解; 2、有唯一最优解,即在可行解中有唯一的最有解; 3、有无穷最优解,即在可行解中有无穷个解都可使目
x= 1.0000 1.0000
即极小值为-1,是x1=1,x2=1时取得。
Matlab程序: ch702.m
15
【例 3】 解非线性方程组
x12
( x1
x2 1 0 2)2 (x2
0.5) 2
1
0
解:解此非线性方程组等价于求解无约束非线性规划问题:
min (x12 x2 1)2 (( x1 2)2 (x2 0.5)2 1)2
第七章 最优化计算方法
1
第一节 线性方程组的应用
一、实验目的:
1、了解线性规划问题及可行解、最优解的概念 ;
2、掌握Matlab软件关于求解线性规划的语句和方法。
二、实验原理和方法:
在生活实践中,很多重要的实际问题都是线性的(至少能 够用线性函数很好的近似表示),所以我们一般把这些问 题化为线性的目标函数和约束条件进行分析,通常将目标 函数和约束都是线性表达式的规划问题称为线性规划 。
在Matlab优化工具箱中,linprog函数是使用单纯形法求解 下述线性规划问题的函数。
min s.t.
f cT x Ax b , aeqx beq; vlb x vub
6
它的命令格式为:
[x, fval ] linprog(c, A,b, aeq,beq, vlb, vub) [x, fval ] linprog(c, A,b, aeq,beq, vlb, vub, x0)
8
min
f 3x1 x 2 x3
2x1 x3 1
s.t.
x1 2x 2 x3 11 4x1 x 2 2x3 3
xi 0, i 1,2,3
然后建立M文件如下:
c=[-3;1;1];A=[1 -2 1;4 -1 -2];b=[11;-3]; aeq=[2 0 -1];beq=-1;vlb=[0;0;0]; [x,fval]=linprog(c,A,b,aeq,beq,vlb)
12
三、实验内容与步骤
在Matlab软件中,求解无约束规划的常用命令是: x=fminunc(‘fun’,x0)
其中,fun函数应预先定义到ห้องสมุดไป่ตู้文件中,并设置初始 解向量为x0。
13
【例 2】 求解 min
f
(x)
3 2
x12
1 2
x
2 2
x1x 2
2x1
取 x(0) (2,4)T
解:首先建立函数文件fun702.m
function f fun702 (x) f 3 / 2 x(1)^2 1/ 2 x(2)^2 x(1) x(2) 2 x(1)
14
以fun702为文件名保存此函数文件。 在命令窗口输入: x0=[-2;4]; x=fminunc('fun702',x0) 结果显示:
f= -1.0000
其中:A为约束条件矩阵,b,c分别为目标函数的系数向量和 约束条件中最右边的数值向量;也可设置解向量的上界vlb和 下界vub,即解向量必须满足vlb<=x<=vub;还可预先设置 初始解向量x0。
如没有不等式,而只有等式时,A=[ ],b=[ ]; 输出的结果:x表示最优解向量;fval表示最优值。
7
【例 1】 求解线性规划问题:
max
f 3x1 x2 x3
x1 2x2 x3 11
s.t.
4x1 x2 2x3 3 2x1 x3 1
xi 0,i 1,2,3
min
解:考虑到linprog函数只解决形如
s.t.
的线性规划。所以先要将线性规划 变为如下形式:
f cT x Ax b, aeqx beq; x 0
1) 选取初始点x0 ,并令k 0; 2) 得到xk 后,选取一个搜索方向Pk ,使得沿着这个方向的
目标函数f (x)的值时下降的;
3) 由xk出发,沿Pk 方向选取适当的步长k ,使得 f (xk k Pk ) f (xk ) 由此得到下一个点xk 1 xk k Pk
4) 检验新得到的点xk1是否满足精度要求的最优解。 如果是,则结束运算;否则,令k k 1,返回(2)继续迭代
2
它的一般形式是:
min
f c1x1 c2x 2 cn x n
a11x1 a12x 2 a1n x n b1
s.t.
a 21x1
a 22x
2
a 2n x
n
b2
a m1x1 a m2x 2 a mnx n bm
xi 0
(i 1,2, , n)
也可以用矩阵形式来表示:
标函数达到最优; 4、有可行解,但由于目标函数值无界而无最优解。
4
一般求解线性规划的常用方法是单纯形法和改进 的单纯形法,这类方法的基本思路是先求得一个可行 解,检验是否为最优解;若不是,可用迭代的方法找 到另一个更优的可行解,经过有限次迭代后,可以找 到可行解中的最优解或者判定无最优解。
5
三、内容与步骤: