ansys齿轮接触分析命令流
基于ANSYS_LS_DYNA的直齿锥齿轮动力学接触仿真分析
基于ANSYS/LS 2DY NA 的直齿锥齿轮动力学接触仿真分析高 翔,程建平(江苏大学汽车与交通工程学院,江苏镇江 212013)摘要:针对直齿锥齿轮疲劳破坏中出现儿率最高的齿面接触疲劳强度问题,在UG 中建立齿轮几何模型,利用ANSYS/LS 2DY NA 对齿轮进行动力学接触仿真分析,计算了齿轮副在啮合过程中齿面接触应力、应变的变化情况及两对轮齿同时接触过程中接触压力的分布情况。
关键词:直齿锥齿轮;AN S YS /LS 2D Y NA;动力学;接触仿真分析中图分类号:TH132.421 文献标识码:A 文章编号:1006-0006(2008)02-0050-02Dynam ic Contact Emulate Analysis of Bevel Gear with ANSYS/LS 2DY NAGAO X iang,CHEN G J ian 2ping(School of Aut omotive and Traffic Engineering,J iangsu University,Zhenjiang 212013,China )Ab s tra c t:Geometrical model of a bevel gear is established and bevel gear dyna m ic emulati on analysis is operatedwith ANSYS/LS 2DY NA s oft w are f or that the fatigue failure p r obability of bevel gear is the highest in t ooth surfaces contact fatigue resistance .The contact stress and def or mati on during the meshing p r ocess are calculated .And the distributi on of contact f orce is calculated when t w o pairs of teeth contact si m ultaneously .Key wo rd s:Bevel gear;ANSYS/LS 2DY NA;Dyna m ic;Contact si m ulati on analysis 由于车用齿轮的传动比和传递功率大,加工难度与成本都相当高,所以如何提高车用齿轮的传动性能与使用寿命,近年来一直深受社会各界的广泛关注。
基于ANSYS的Logix齿轮啮合接触分析
0引言差速器作为汽车动力传动系统的重要组成部分,在汽车于凹凸不平的路面上行驶或转弯时,能够限制左右(或前后)驱动轮以不同的速度旋转,确保驱动轮以纯滚动状态行驶。
差速器齿轮的优化设计对保证差速器强度和耐久度,保证车辆安全可靠行驶,提高整车驾驶性,减少能源消耗等具有重要意义。
差速器的齿轮传动性能的影响因素之一是齿形;目前广泛应用于差速器的齿廓曲线齿轮有渐开线齿轮、圆弧齿轮和Logix 齿轮。
日本学者小守勉首次提出了名为Logix 齿轮(Logix Gear )的新型齿轮。
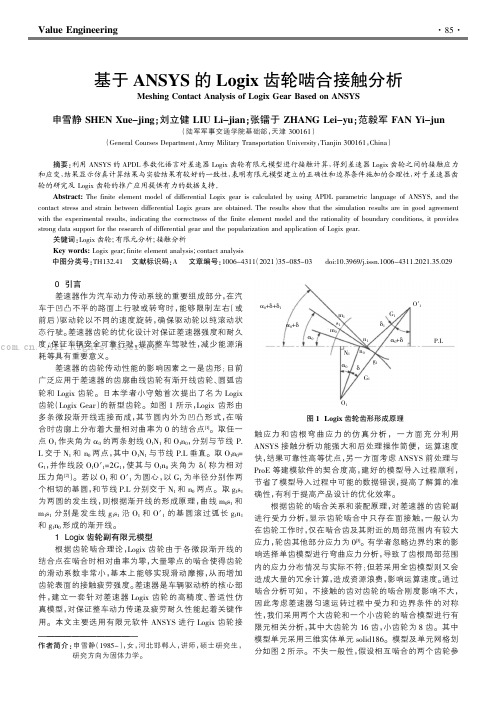
如图1所示,Logix 齿形由多条微段渐开线连接而成,其节圆内外为凹凸形式,在啮合时齿廓上分布着大量相对曲率为0的结合点[1]。
取任一点O 1作夹角为α0的两条射线O 1N 1和O 1n 0,分别与节线P.L 交于N 1和n 0两点,其中O 1N 1与节线P.L 垂直。
取O 1n 0=G 1,并作线段O 1O′1=2G 1,使其与O 1n 0夹角为δ(称为相对压力角[2])。
若以O 1和O′1为圆心,以G 1为半径分别作两个相切的基圆,和节线P.L 分别交于N 1和n 0两点。
取g 1s 1为两圆的发生线,则根据渐开线的形成原理,曲线m 0s 1和m 1s 1分别是发生线g 1s 1沿O 1和O′1的基圆滚过弧长g 1n 1和g 1n 0形成的渐开线。
1Logix 齿轮副有限元模型根据齿轮啮合理论,Logix 齿轮由于各微段渐开线的结合点在啮合时相对曲率为零,大量零点的啮合使得齿轮的滑动系数非常小,基本上能够实现滑动摩擦,从而增加齿轮表面的接触疲劳强度。
差速器是车辆驱动桥的核心部件,建立一套针对差速器Logix 齿轮的高精度、普适性仿真模型,对保证整车动力传递及疲劳耐久性能起着关键作用。
本文主要选用有限元软件ANSYS 进行Logix 齿轮接触应力和齿根弯曲应力的仿真分析,一方面充分利用ANSYS 接触分析功能强大和后处理操作简便,运算速度快,结果可靠性高等优点,另一方面考虑ANSYS 前处理与ProE 等建模软件的契合度高,建好的模型导入过程顺利,节省了模型导入过程中可能的数据错误,提高了解算的准确性,有利于提高产品设计的优化效率。
基于ANSYS软件的接触问题分析及在工程中的应用

基于ANSYS软件的接触问题分析及在工程中的应用基于ANSYS软件的接触问题分析及在工程中的应用一、引言接触问题是工程领域中常见的一个重要问题,它在很多实际应用中都具有关键作用。
接触分析能够帮助工程师设计和改进各种产品和结构,从而提高其性能和寿命,减少故障和事故的发生。
ANSYS作为一款强大的工程仿真软件,提供了多种接触分析方法和工具,为工程师们解决接触问题提供了便利。
本文将重点介绍基于ANSYS软件的接触问题分析方法和其在工程中的应用。
二、接触问题的分析方法接触问题的分析方法主要包括两种:解析方法和数值模拟方法。
解析方法基于一系列假设和理论分析,能够给出理论解析解,但局限于简单的几何形状和边界条件。
数值模拟方法通过建立几何模型和边界条件,利用数值计算的方法求解接触过程的力学行为和变形情况,可以适用于复杂的几何形状和边界条件。
ANSYS软件采用的是数值模拟方法,它基于有限元法和多体动力学原理,可以使用接触元素来建立模型,模拟接触过程中的相互作用,得到接触点的应力、应变以及变形信息,从而分析接触的性能和行为。
接下来将介绍ANSYS软件中的接触分析方法和其在工程中的应用。
三、接触分析方法1. 接触元素:ANSYS软件提供了多种接触元素供用户选择,包括面接触元素、体接触元素和线接触元素。
用户可以根据具体的接触问题选择合适的接触元素,建立几何模型来模拟接触行为。
2. 接触定义:在ANSYS软件中,用户可以通过定义接触性质、接触参数和接触约束来描述接触问题。
接触性质包括摩擦系数、接触行为模型等;接触参数包括接触初始状态、接触刚度等;接触约束包括接触面间的约束条件等。
3. 接触分析:通过在ANSYS软件中建立模型,定义接触参数和加载条件,进行接触分析,得到接触点的应力、应变和变形信息。
可以通过分析结果来评估接触性能,发现可能存在的问题,并进行改进和优化。
四、ANSYS软件在工程中的应用1. 机械工程领域:在机械工程中,接触问题广泛存在于各种设备和结构中,如轴承、齿轮、支撑结构等。
(完整版)ANSYS最常用命令流+中文注释(超级大全)

(完整版)ANSYS最常用命令流+中文注释(超级大全)ANSYS最常用命令流+中文注释VSBV, NV1, NV2, SEPO, KEEP1, KEEP2 —Subtracts volumes from volumes,用于2个solid相减操作,最终目的是要nv1-nv2=?通过后面的参数设置,可以得到很多种情况:sepo项是2个体的边界情况,当缺省的时候,是表示2个体相减后,其边界是公用的,当为sepo的时候,表示相减后,2个体有各自的独立边界。
keep1与keep2是询问相减后,保留哪个体?当第一个为keep时,保留nv1,都缺省的时候,操作结果最终只有一个体,比如:vsbv,1,2,sepo,,keep,表示执行1-2的操作,结果是保留体2,体1被删除,还有一个1-2的结果体,现在一共是2个体(即1-2与2),且都各自有自己的边界。
如vsbv,1,2,,keep,,则为1-2后,剩下体1和体1-2,且2个体在边界处公用。
同理,将v换成a 及l是对面和线进行减操作!mp,lab, mat, co, c1,…….c4 定义材料号及特性lab: 待定义的特性项目(ex,alpx,reft,prxy,nuxy,gxy,mu,dens)ex: 弹性模量nuxy: 小泊松比alpx: 热膨胀系数reft: 参考温度reft: 参考温度prxy: 主泊松比gxy: 剪切模量mu: 摩擦系数dens: 质量密度mat: 材料编号(缺省为当前材料号)co: 材料特性值,或材料之特性,温度曲线中的常数项c1-c4: 材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数定义DP材料:首先要定义EX和泊松比:MP,EX,MA T,……MP,NUXY,MAT,……定义DP材料单元表(这里不考虑温度):TB,DP,MA T进入单元表并编辑添加单元表:TBDATA,1,CTBDATA,2,ψTBDATA,3,……如定义:EX=1E8,NUXY=0.3,C=27,ψ=45的命令如下:MP,EX,1,1E8MP,NUXY,1,0.3TB,DP,1TBDATA,1,27TBDATA,2,45这里要注意的是,在前处理的最初,要将角度单位转化到“度”,即命令:*afun,degVSEL, Type, Item, Comp, VMIN, VMAX, VINC, KSWP Type,是选择的方式,有选择(s),补选(a),不选(u),全选(all)、反选(inv)等,其余方式不常用Item, Comp 是选取的原则以及下面的子项如volu 就是根据实体编号选择,loc 就是根据坐标选取,它的comp就可以是实体的某方向坐标!其余还有材料类型、实常数等MIN, VMAX, VINC,这个就不必说了吧!,例:vsel,s,volu,,14vsel,a,volu,,17,23,2上面的命令选中了实体编号为14,17,19,21,23的五个实体VDELE, NV1, NV2, NINC, KSWP: 删除未分网格的体nv1:初始体号nv2:最终的体号ninc:体号之间的间隔kswp=0:只删除体kswp=1:删除体及组成关键点,线面如果nv1=all,则nv2,ninc不起作用其后面常常跟着一条显示命令VPLO,或aplo,nplo,这个湿没有参数的命令,输入后直接回车,就可以显示刚刚选择了的体、面或节点,很实用的哦!Nsel, type, item, comp, vmin, vmax, vinc, kabs 选择一组节点为下一步做准备Type: S: 选择一组新节点(缺省)R: 在当前组中再选择A: 再选一组附加于当前组U: 在当前组中不选一部分All: 恢复为选中所有None: 全不选Inve: 反向选择Stat: 显示当前选择状态Item: loc: 坐标node: 节点号Comp: 分量Vmin,vmax,vinc: ITEM范围Kabs: “0” 使用正负号“1”仅用绝对值下面是单元生死第一个载荷步中命令输入示例:!第一个载荷步TIME,... !设定时间值(静力分析选项)NLGEOM,ON !打开大位移效果NROPT,FULL !设定牛顿-拉夫森选项ESTIF,... !设定非缺省缩减因子(可选)ESEL,... !选择在本载荷步中将不激活的单元EKILL,... !不激活选择的单元ESEL,S,LIVE !选择所有活动单元NSLE,S !选择所有活动结点NSEL,INVE !选择所有非活动结点(不与活动单元相连的结点)D,ALL,ALL,0 !约束所有不活动的结点自由度(可选)NSEL,ALL !选择所有结点ESEL,ALL !选择所有单元D,... !施加合适的约束F,... !施加合适的活动结点自由度载荷SF,... !施加合适的单元载荷BF,... !施加合适的体载荷SA VESOLVE请参阅TIME,NLGEOM,NROPT,ESTIF,ESEL,EKILL,NSLE,NSEL,D, F,SF和BF命令得到更详细的解释。
ansys齿轮接触分析案例

加载与求解
01
施加约束
根据实际情况,对齿轮的轴孔、 端面等部位施加适当的约束,如 固定约束、旋转约束等。
02
03
施加接触力
求解设置
根据齿轮的工作状态,在齿面之 间施加接触力,模拟实际工作情 况。
设置合适的求解器、迭代次数、 收敛准则等,确保求解的准确性 和稳定性。
后处理
结果查看
查看齿轮接触分析的应力分布、应变分布、接触压力分布等 结果。
02
分析接触区域的大小、应力分布情况,评估齿轮的传动性能和
寿命。
根据分析结果,优化齿轮的设计和制造工艺,提高其传动性能
03
和寿命。
06
CATALOGUE
ansys齿轮接触分析案例四:蜗轮蜗杆
问题描述
蜗轮蜗杆传动是一种常见的减速传动 方式,具有传动比大、传动平稳、噪 音低等优点。但在实际应用中,蜗轮 蜗杆的接触问题常常成为影响其性能 和寿命的关键因素。
属性。
边界条件和载荷
01
约束蜗杆的轴向位移,固定蜗轮的底面。
02 在蜗杆的输入端施加扭矩,模拟实际工作状态。
03 考虑温度场的影响,在模型中设置初始温度和环 境温度,并考虑热传导和热对流。
求解和结果分析
进行静力分析和瞬态动力学分析,求解接触应力 分布、摩擦力变化以及温度场分布等。
对求解结果进行后处理,提取关键数据,进行可 视化展示。
通过齿轮接触分析,可以发现潜在的 应力集中区域和齿面磨损问题,提高 齿轮的可靠性和寿命。
齿轮接触分析的应用领域
汽车工业
用于研究汽车变速器、发动机和传动系统中的齿轮接触行为,优 化齿轮设计以提高燃油经济性和可靠性。
风电领域
用于研究风力发电机组中齿轮箱的齿轮接触行为,提高风力发电设 备的效率和可靠性。
ANSYS高级接触问题处理
• -支持大的相对滑动;
• -支持大应变和大转动。
• 例如: 面一面接触可以模拟金属成型,如轧 制过程。
• 2. 点一面接触单元用于某一点和任意形状 的面的接触
• -可使用多个点-面接触单元模拟棱边和 面的接触;
• -不必事先知道接触的准确位置; • -两个面可以具有不同的网格; • -支持大的相对滑动; • -支持大应变和大转动。 • 例:点面接触可以模拟棱边和面之间的接
• -创建关键点(KMESH)-控制节点(Pilot)
• 刚性目标面能与控制点联系起来,Pilot实际上是只有一个 节点的单元,通过这个节点的运动可以控制整个目标面的 运动。ANSYS只在Pilot节点上检查边界条件而忽略其它 节点的约束。
• ·对可变形体目标面建立目标单元的步骤是:
• 1.先选择可变形体表面上的节点
§2 面-面接触单元
• 使用面-面接触单元计算刚-柔、柔-柔接触分析。 • 把一个面指定为目标面(Targe),另一个面指定为接触
面(conta),合起来叫接触对。 • 接触单元被约束不能侵入目标面,然而目标单元能侵入接
触面。 • ·2D目标单元 • TARGE169 :
• ·2D面-面接触单元
• 采用足够小的时间步长以获得收敛。 • -对于瞬态分析,冲击时必须使用足够数
量的计算步以描述表面间的动量转移。
• -对于路径相关现象(如接触摩擦),相 对较小的最大时间步长对计算精度是必须 的。
面一面接触单元
• §1 概述 • 面-面接触单元,是模拟任意两个表面间接触的方法。表面可以具有任意形
状。是ANSYS中最通用的接触单元。精度高、特性丰富还可使用接触向导建 模方便。(其它接触单元目前尚不能用向导)。 • ·面-面接触单元在面的高斯点处传递压力,这种先进技术使面-面接触单元 具有很多优点: • -与低阶单元和高阶单元都兼容 • -提供更好的接触结果(于后处理接触压力和摩擦应力) • -可考虑壳和梁的厚度,以及壳的厚度变化 • -半自动接触刚度计算 • -刚性表面由“控制节点”控制 • -热接触特性 • -众多的高级选项来处理复杂问题。 • ·具有众多的高级选项(20个可用的实常数、2个材料属性和30个可用的单元 选项)提供了丰富的特征库,能够用于模拟特殊的效果和处理困难的收敛情 况。 • 然而众多的选项的智能缺省选项可以有效求解许多接触问题而不需要用户介 入太多。 • 通常的做法是:开始使用高级选项之前,先试着采用缺省设置:只指定罚刚 度,穿透容差和子步数,然后进行分析。只在采用缺省设置遇到困难时才采 用高级选项。 • ·所有的高级选项也可以通过接触向导来控制。
《2024年基于ANSYS软件的接触问题分析及在工程中的应用》范文
《基于ANSYS软件的接触问题分析及在工程中的应用》篇一一、引言随着现代工程技术的快速发展,接触问题在各种工程领域中扮演着越来越重要的角色。
ANSYS软件作为一种强大的工程仿真工具,被广泛应用于解决各种复杂的工程问题,包括接触问题。
本文将详细介绍基于ANSYS软件的接触问题分析,并探讨其在工程中的应用。
二、ANSYS软件接触问题分析1. 接触问题基本理论接触问题是一种高度非线性问题,涉及到两个或多个物体在力、热、电等作用下的相互作用。
在ANSYS软件中,接触问题主要通过定义接触对、设置接触面属性、设定接触压力等参数进行模拟。
2. ANSYS软件中接触问题的分析步骤(1)建立模型:根据实际问题,建立相应的几何模型和有限元模型。
(2)定义接触对:在ANSYS软件中,需要定义主从面以及相应的接触类型(如面-面接触、点-面接触等)。
(3)设置接触面属性:根据实际情况,设置接触面的摩擦系数、粘性等属性。
(4)设定载荷和约束:根据实际情况,设定载荷和约束条件。
(5)求解分析:进行求解分析,得到接触问题的解。
3. 接触问题分析的难点与挑战接触问题分析的难点主要在于高度的非线性和不确定性。
此外,还需要考虑多种因素,如接触面的摩擦、粘性、温度等。
这些因素使得接触问题分析变得复杂且具有挑战性。
三、ANSYS软件在工程中的应用1. 机械工程中的应用在机械工程中,ANSYS软件被广泛应用于解决各种接触问题。
例如,在齿轮传动、轴承、连接件等部件的设计和优化中,ANSYS软件可以模拟出部件之间的接触力和应力分布,为设计和优化提供有力支持。
2. 土木工程中的应用在土木工程中,ANSYS软件可以用于模拟土与结构之间的接触问题。
例如,在桥梁、大坝、建筑等结构的分析和设计中,ANSYS软件可以模拟出结构与土之间的相互作用力,为结构的设计和稳定性分析提供依据。
3. 汽车工程中的应用在汽车工程中,ANSYS软件被广泛应用于模拟汽车零部件之间的接触问题。
ANSYS齿轮接触
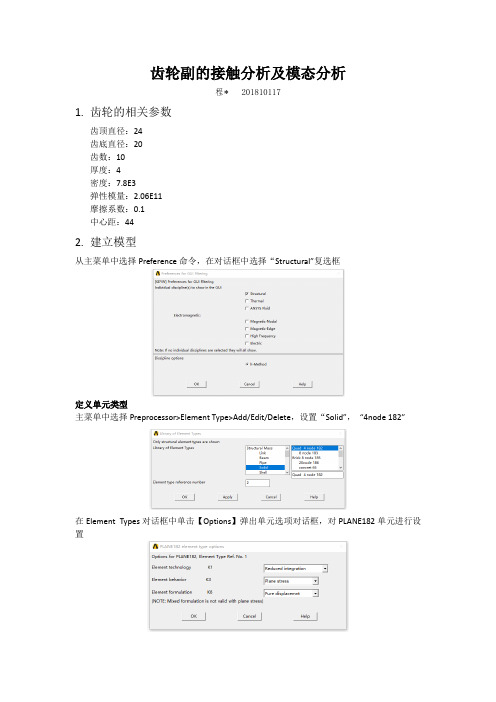
齿轮副的接触分析及模态分析程* 2018101171.齿轮的相关参数齿顶直径:24齿底直径:20齿数:10厚度:4密度:7.8E3弹性模量:2.06E11摩擦系数:0.1中心距:442.建立模型从主菜单中选择Preference命令,在对话框中选择“Structural”复选框定义单元类型主菜单中选择Preprocessor>Element Type>Add/Edit/Delete,设置“Solid”,“4node 182”在Element Types对话框中单击【Options】弹出单元选项对话框,对PLANE182单元进行设置定义实常数选择Preprocessor>Real Constants>Add/Edit/Delete,设置常数单元类型,中将厚度设置为4定义材料属性从主菜单中选择Preprocessor>Material Props>Material Models,设置材料的弹性模量EX=2.06E11、泊松比PRXY=0.3,材料密度为7.8E3,摩擦系数为0.1建立齿轮面模型将当前坐标系设置为总体柱坐标系。
从实用菜单中选择WorkPlane>Change Actives CS to>Global Cylindrical定义关键点:Preprocessor>Modeling>Create>Keypoints>In Active CS,编号1(20,0);定义辅助点:Preprocessor>Modeling>Create>Keypoints>In Active CS偏移工作平面到给定位置选择WorkPlane>Offset WP to>Keypoints +,选择110号辅助点旋转工作平面选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX,ZXAngles”文本框中输入-50,0,0将激活的坐标系设置为工作平面坐标系:选择WorkPlane>Change Actives CS to>Working Plane建立第二个关键点,Preprocessor>Modeling>Create>Keypoints>In Active CS ,2(12.838,0)设置总体柱坐标系,选择WorkPlane>Change Actives CSto>Global Cylindrical建立其余辅助点:Preprocessor>Modeling>Create>Keypoints>In Active CS,设置编号依次为120,130,140,150,160,其坐标依次为(16,43)、(16,46)、(16,49)、(16,52)、(16,55)a.偏移工作平面到给定位置选择WorkPlane>Offset WP to>Keypoints +,选择120号辅助点b.旋转工作平面,选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX,ZXAngles”文本框中输入3,0,0c. 将激活的坐标系设置为工作平面坐标系:选择WorkPlane>Change Actives CS to>Working Plane建立第三个关键点:Preprocessor>Modeling>Create>Keypoints>In Active CS,3(13.676,0)重复以上a—c,建立其余的辅助点和关键点,分别把工作平面平移到编号为130,140,150,160的辅助点,然后旋转工作平面,旋转角度均为3,0,0,再讲工作平面设为当前坐标系,在工作平面中分别建立编号为4,5,6,7的关键点,其坐标依次为(14.513,0)、(15.351,0)、(16.189,0)、(17.027,0)建立编号为8,9,10的关键点,选择WorkPlane>Change Actives CSto>Global Cylindrical、Preprocessor>Modeling>Create>Keypoints>In Active CS,建立关键点8(24,9.875)、9(24,13)、10(20,5)创建圆弧线选择Preprocessor>Modeling>Create>Lines>Straight Line,按顺序连接关键点,再将其相加使其成为一条线Preprocessor>Modeling>Operate>Booleans>Add>Lines,删除原来的线偏移工作平面到总坐标系的原点:WorkPlane>Offset WP to>Global Origin将工作平面与总体坐标系对齐:WorkPlane>Align WP with>Global Cartesian将工作平面旋转13°,选择WorkPlane>Offset WP by Increments,在“XY,YZ,ZX Angles”文本框中输入13,0,0将所有线沿着X-Z面进行镜像(在Y方向),选择Preprocessor>Modeling>Reflect>Lines把每个齿顶上的两条线粘起来,选择Preprocessor>Modeling>Operate>Booleans>Glue>Lines 把齿顶上的两条线加起来,成为一条线,Preprocessor>Modeling>Operate>Booleans>Add>Lines 在柱坐标系下复制线,设置坐标系选择WorkPlane>Change Actives CS to>Global Cylindrical,主菜单选择Preprocessor>Modeling>Copy>Lines把齿底上的所有线粘起来,Preprocessor>Modeling>Operate>Booleans>Glue>Lines,分别选择齿低的两条线,再把齿底上的所有线加起来把所有线粘起来,选择Preprocessor>Modeling>Operate>Booleans>Glue>Lines用当前定义的所有线生成一个面,选择Preprocessor>Modeling>Create>Areas>Arbitrary>By Lines创建圆面,选择Preprocessor>Modeling>Create>Areas>Circle>Solid Circle从齿轮面中减去圆面,选择Preprocessor>Modeling>Operate>Booleans>Subtract>Areas在直角坐标系下复制面,设置坐标系选择WorkPlane>Change Actives CS to>Global Cartesian,复制Preprocessor>Modeling>Copy>Areas创建局部坐标系,选择WorkPlane>Local Coordinate Systems>Create Local CS>At Specified Loc+将当前坐标系设置为局部坐标系,选择WorkPlane>Change Actives CS to>Specified Coord Sys在局部坐标系下复制面,选择Preprocessor>Modeling>Copy>Areas删除第二个面,选择Preprocessor>Modeling>Delete>Area and Below,生成结果划分网格对齿面划分网格,选择Preprocessor>Meshing>MeshTool定义接触对(1)从应用菜单中选择Select>Entities,在类型下拉列表中选“Lines”,点击【Apply】(2)打开先选择对话框,选择一个齿轮上可能与另一个齿轮相接触的线,点击【OK】(3)在实体选择对话框中选择“Nodes”,在选择方式中选择“Attached to ”,在单选列表中选择“Lines, all”(4)选择Select>Como/Assembly>Create Component,在“Component name”文本框中输入”node1”,点击【OK】(5)从实用菜单中选择Select>Everything(6)在实体选择对话框中在类型下拉列表中选“Lines”,选择方式选“By Num/Pick”,点击【Apply】,弹出线选择对话框,选择另一个齿轮上可能与前一个齿轮相接触的线,点击【OK】在实体选择对话框中选择“Nodes”,在选择方式中选择“Attached to ”,在单选列表中选择“Lines, all”(7)选择Select>Como/Assembly>Create Component,在“Component name”文本框中输入”node2”,点击【OK】(8)从实用菜单中选择Select>Everything(9)点击工具栏中的【接触定义向导】(10)选择工具条中的第一项,会打开下一步操作向导,在对话框中选择”NODE2”,并点击【Next】(12)在对话框选取“NODE1”,点击【NEXT】(13)点击【Create】,建立接触对3.定义边界条件并求解(1)施加位移边界,选择WorkPlane>Change Actives CS to>Global Cylindrical;选择Preprocessor>Modeling>Move/Modify>Rotate Node CS>To Active CS,打开节点选择的对话框,要求选择欲旋转的坐标系的节点;选择第一个齿轮内径上所有节点,从实用菜单中选择Select>Entities,弹出实体选择对话框,选择第一个齿轮内径上所有的节点选择Solution>Define Loads>Apply>Structural>Displacement>on Nodes,点开节点选择对话框,要求选择欲施加位移约束的节点。
全面详细讲解ansys接触分析
搜集整理的资料,详细讲解ansys接触分析,有实例命令流,亲测过。
包括以下部分。
一般的接触分类ANSYS接触能力点─点接触单元点─面接触单元面─面的接触单元执行接触分析面─面的接触分析.接触分析的步骤:步骤1:建立模型,并划分网格步骤二:识别接触对步骤三:定义刚性目标面步骤4:定义柔性体的接触面步骤5:设置实常数和单元关键字步骤六:步骤7:给变形体单元加必要的边界条件步骤8:定义求解和载步选项第十步:检查结果点─面接触分析点─面接触分析的步骤点-点的接触接触分析实例(GUI方法)非线性静态实例分析(命令流方式)接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS 使用的接触单元和使用它们的过程,下面分类详述。
ANSYS齿轮接触分析案例.
齿轮的接触分析实例
(6)将激活的坐标系设置为工作平面坐标系: WorkPlane>Change Actives CS to>Working Plane。 (7)建立第二个关键点。 a.从主菜单选择 Preprocessor>Modeling>Create>Keypoints>In Active CS。 b.建立关键点2。如下图,完毕点击【OK】。
打开材料摩擦系数对话框。如下图,设置摩擦系 数为0.1。完毕点击【OK】,并退出材料属性设 置对话框。
齿轮的接触分析实例
2.5 建立齿轮面模型
(1)将当前坐标系设置为总体柱坐标系。从实用菜单中选择 WorkPlane>Change Actives CS to>Global Cylindrical。 (2)定义一个关键点。 a.从主菜单选择 Preprocessor>Modeling>Create>Keypoints>In Active CS。 b.建立关键点1。如下图,完毕点击【OK】。
(3)在下图的Element Types对话框中单击【Options】 弹出单元选项对话框,对PLANE182单元进行设 置。设置完成后点击【OK】,然后【Close】。
齿轮的接触分析实例
2.3 定义实常数 (1)从主菜单中选择Preprocessor>Real Constants>Add/Edit/Delete,打开如下图的“实 常数”对话框,点击【Add】,设置实常数单元类 型。
齿轮的接触分析实例
(14)重复以上步骤,建立其余的辅助点和关键点:按照 (10)-(13)步,分别把工作平面平移到编号为130, 140,150,160的辅助点,然后旋转工作平面,旋转角度 均为3,0,0,再讲工作平面设为当前坐标系,在工作平面中 分别建立编号为4,5,6,7的关键点,其坐标依次为 (14.513,0)、(15.351,0)、(16.189,0)、 (17.027,0)。建立完毕后的结果如下图所示:
基于ANSYS的直齿面齿轮的接触应力分析
1072013年9月下 第18期 总第174期1 概述随着齿轮传动向重载、高速、低噪、高可靠性方向发展,现代齿轮设计对齿轮传动系统的静、动态特性提出了更高的要求。
齿轮设计的主要内容之一是强度设计,因此,建立比较精确的分析模型,准确的掌握齿轮应力的分布特点和变化规律具有重要的意义。
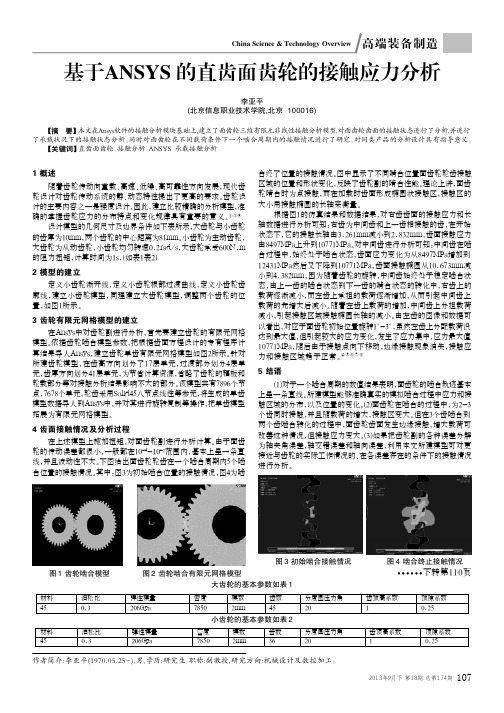
①③④设计模型的几何尺寸及边界条件如下表所示,大齿轮与小齿轮的齿厚为10mm,两个齿轮的中心距离为81mm。
小齿轮为主动齿轮,大齿轮为从动齿轮,小齿轮均匀转速0.2rad/s,大齿轮承受600N.m 的阻力扭矩,计算时间为1s.(如表1表2)2 模型的建立定义小齿轮渐开线,定义小齿轮根部过渡曲线,定义小齿轮齿廓线,建立小齿轮模型,同理建立大齿轮模型,调整两个齿轮的位置,如图1所示。
3 齿轮有限元网格模型的建立在Ansys中对齿轮副进行分析,首先要建立齿轮的有限元网格模型。
依据齿轮啮合模型参数,把根据齿面方程设计的专有程序计算结果导人Ansys,建立齿轮单齿有限元网格模型如图2所示。
针对所建齿轮模型,在齿高方向划分了17层单元,过渡部分划分4层单元,齿厚方向划分41层单元,为节省计算资源,省略了齿轮的辐板和轮载部分等对接触分析结果影响不大的部分。
该模型共有7896个节点,7678个单元,轮齿采用Solid45八节点线性等参元,将生成的单齿模型数据导人到Ansys中,并对其进行旋转复制等操作,把单齿模型拓展为有限元网格模型。
4 齿面接触情况及分析过程在上述模型上施加扭矩,对面齿轮副进行分析计算。
由于面齿轮的传动误差都很小,一般都在10-4-10-2范围内,基本上呈一条直线,并且波动性不大。
下图给出面齿轮轮齿在一个啮合周期内5个啮合位置的接触情况。
其中:图3为初始啮合位置的接触情况,图4为啮合终了位置的接触情况。
图中显示了不同啃合位置面齿轮轮齿接触区域的位置和形状变化,反映了齿轮副的啃合性能。
理论上讲,面齿轮啃合时为点接触,而在加载时齿面形成椭圆状接触区,接触区的大小用接触椭圆的长轴来衡量。
ansys齿轮接触分析命令流

ansys齿轮接触分析命令流/prep7!单位是n,和mm!先建立两个齿轮模型(没又齿根过渡线,只适合基圆半径小于齿根圆的情况) m=4 !齿轮模数z1=45 !齿轮齿数pi=3.1415926ang=20 !分度圆上的压力角ha_c=1 ! 齿顶高系数c_c=0.25 !顶隙系数ha=ha_c*m !齿顶高hf=(ha_c+c_c)*m !齿根高d=m*z1 !分度圆直径db=d*cos(ang*pi/180) !基圆直径da=d+2*ha !齿顶圆直径df=d-2*hf !齿根圆直径x=0s=pi*m/2+2*x*m*tan(ang*pi/180) !分度圆齿厚 theta_s=tan(ang*pi/180)-ang*pi/180fai_s=s/dalfa_a=acos(db/da)*180/pi !齿顶圆压力角(角度表示)alfa_f=acos(db/df)*180/pi !齿根圆压力角(角度表示) dfr=0.38*m !齿根圆角半径!b=0.012 !齿宽deata_ang=360/z1 !齿轮两齿间的夹角*dim,alfa,array,10*dim,rk,array,10*dim,theta,array,10*dim,fai,array,10*do,i,1,10alfa(i)=(alfa_f+((alfa_a-alfa_f)/9)*(i-1))*pi/180 !每条渐开线上生成10各关键点所对应的压力角大小(用弧表示)*enddo*do,i,1,10rk(i)=(db/2)/cos(alfa(i)) theta(i)=tan(alfa(i))-alfa(i) !弧度表示*enddo*do,i,1,10fai(i)=(theta_s+fai_s-theta(i))*180/pi !角度*enddoCSYS,1*do,i,1,10k,i,rk(i),fai(i) *enddoksel,allBSPLIN,ALL !绘制齿廓线csys,0LSYMM,Y,1K,30000LARC,10,12,30000,da/2 csys,1LSEL,ALLLGEN,Z1,ALL,,,0,-deata_angkpoint=10+1*do,i,1,z1-1,1larc,kpoint,kpoint+2,30000,df/2kpoint=kpoint+4*enddolarc,187,1,30000,df/2 LSEL,ALLAL,ALLCYL4, , ,50ASBA, 1, 2 csys,0AGEN,2,3, , ,1.00*d, , , ,0!********************************************************* ET,1,PLANE82MP,EX,1,500000MP,NUXY,1,0.3MP,EX,2,400000MP,NUXY,2,0.3TYPE, 1MAT, 1 REAL,ESYS, 0SECNUM,!*SMRT,3MSHAPE,0,2D MSHKEY,0AMESH,3!*MAT, 2AMESH,1FLST,5,90,2,ORDE,73FITEM,5,5 FITEM,5,-6 FITEM,5,61 FITEM,5,-62 FITEM,5,83 FITEM,5,-84 FITEM,5,89 FITEM,5,-90 FITEM,5,145 FITEM,5,-147 FITEM,5,180 FITEM,5,-181 FITEM,5,187 FITEM,5,211 FITEM,5,-212 FITEM,5,216 FITEM,5,-217FITEM,5,242 FITEM,5,-243 FITEM,5,248 FITEM,5,-249 FITEM,5,393 FITEM,5,-394 FITEM,5,444 FITEM,5,-446 FITEM,5,461 FITEM,5,-464 FITEM,5,483 FITEM,5,-484FITEM,5,525 FITEM,5,584 FITEM,5,587 FITEM,5,624 FITEM,5,635FITEM,5,641 FITEM,5,643 FITEM,5,681 FITEM,5,703 FITEM,5,-704 FITEM,5,732 FITEM,5,737 FITEM,5,774 FITEM,5,-775 FITEM,5,864 FITEM,5,-865FITEM,5,882 FITEM,5,-883 FITEM,5,895 FITEM,5,903 FITEM,5,-904FITEM,5,922 FITEM,5,941 FITEM,5,961 FITEM,5,967 FITEM,5,-968 FITEM,5,982 FITEM,5,1000 FITEM,5,-1003FITEM,5,1114 FITEM,5,-1117FITEM,5,1127 FITEM,5,1163 FITEM,5,-1166FITEM,5,1171 FITEM,5,-1176FITEM,5,1266 FITEM,5,1270 FITEM,5,1310 FITEM,5,-1312FITEM,5,1343 FITEM,5,-1346FITEM,5,1350 FITEM,5,-1351CM,_Y,ELEMESEL, , , ,P51X CM,_Y1,ELEMCMSEL,S,_YCMDELE,_Y!*!*EREF,_Y1, , ,1,0,1,1CMDELE,_Y1CM,_NODECM,NODE CM,_ELEMCM,ELEM CM,_KPCM,KPCM,_LINECM,LINE CM,_AREACM,AREA CM,_VOLUCM,VOLU /GSAV,cwz,gsav,,temp MP,MU,1,0.2MAT,1R,3REAL,3ET,2,169ET,3,172KEYOPT,3,9,0KEYOPT,3,10,2 R,3,RMORE,RMORE,,0RMORE,0! Generate the target surfaceLSEL,S,,,1LSEL,A,,,2LSEL,A,,,3LSEL,A,,,4LSEL,A,,,5LSEL,A,,,6LSEL,A,,,7LSEL,A,,,8LSEL,A,,,9LSEL,A,,,10LSEL,A,,,128LSEL,A,,,130LSEL,A,,,131LSEL,A,,,132 LSEL,A,,,133 LSEL,A,,,134 LSEL,A,,,135 LSEL,A,,,136 LSEL,A,,,137 LSEL,A,,,138 LSEL,A,,,178 LSEL,A,,,179 LSEL,A,,,180 CM,_TARGET,LINETYPE,2NSLL,S,1ESLN,S,0ESURFCMSEL,S,_ELEMCM! Generate the contact surfaceLSEL,S,,,264 LSEL,A,,,265 LSEL,A,,,266 LSEL,A,,,267 LSEL,A,,,268 LSEL,A,,,269 LSEL,A,,,270 LSEL,A,,,271 LSEL,A,,,272 LSEL,A,,,273LSEL,A,,,274 LSEL,A,,,275 LSEL,A,,,276 LSEL,A,,,277 LSEL,A,,,278 LSEL,A,,,279 LSEL,A,,,280 LSEL,A,,,281 LSEL,A,,,282 LSEL,A,,,283 LSEL,A,,,284 LSEL,A,,,285 LSEL,A,,,286 LSEL,A,,,287 LSEL,A,,,288CM,_CONTACT,LINETYPE,3NSLL,S,1ESLN,S,0ESURFALLSELESEL,ALLESEL,S,TYPE,,2 ESEL,A,TYPE,,3 ESEL,R,REAL,,3 /PSYMB,ESYS,1/PNUM,TYPE,1/NUM,1EPLOTESEL,ALLESEL,S,TYPE,,2 ESEL,A,TYPE,,3 ESEL,R,REAL,,3 CMSEL,A,_NODECM CMDEL,_NODECM CMSEL,A,_ELEMCM CMDEL,_ELEMCM CMSEL,S,_KPCM CMDEL,_KPCM CMSEL,S,_LINECM CMDEL,_LINECM CMSEL,S,_AREACM CMDEL,_AREACM CMSEL,S,_VOLUCM CMDEL,_VOLUCM /GRES,cwz,gsav CMDEL,_TARGETCMDEL,_CONTACT NROPT,UNSYMLOCAL,11,1,180,0,0, , , ,1,1,EPLOTCSYS,1LSEL,ALLFLST,5,4,4,ORDE,2FITEM,5,181FITEM,5,-184LSEL,S, , ,P51X NSEL,ALL NSLL,S,1NPLOTFLST,2,88,1,ORDE,4 FITEM,2,181 FITEM,2,-184FITEM,2,635FITEM,2,-718NROTAT,P51XFINISH/SOLFLST,2,88,1,ORDE,4 FITEM,2,181 FITEM,2,-184FITEM,2,635FITEM,2,-718!*/GOD,P51X, , , , , ,UX, , , , , FLST,2,88,1,ORDE,4 FITEM,2,181 FITEM,2,-184FITEM,2,635FITEM,2,-718!*/GOD,P51X, ,0.6, , , ,UY, , , , , ALLSEL,ALLCSYS,11,EPLOTLSEL,ALLFLST,5,4,4,ORDE,2 FITEM,5,365 FITEM,5,-368LSEL,S, , ,P51X NSEL,ALL NSLL,S,1NPLOTFINISH/PREP7FLST,2,88,1,ORDE,4 FITEM,2,2815 FITEM,2,-2818 FITEM,2,3269 FITEM,2,-3352 NROTAT,P51X FINISH/SOLFLST,2,88,1,ORDE,4 FITEM,2,2815 FITEM,2,-2818 FITEM,2,3269 FITEM,2,-3352 !*/GOD,P51X, ,0, , , ,UX, , , , ,ALLSEL,ALLEPLOT!*!*OUTRES,ALL,ALL, !*TIME,1AUTOTS,-1DELTIM,0.05,0.05,0.05,1KBC,0!*TSRES,ERASEsolve/POST1!*/EFACET,1/DSCALE,ALL,1.0 PLNSOL, S,EQV, 0,1.0。
ANSYS高级接触问题处理
• -开始估计时,选用 • FKN = 1.0 大面积实体接触 • FKN = 0.01-0.1 较柔软(弯曲占主导的)部分 • -另外,也可以指定一个绝对刚度值,单位:(力/长度)
/ 面积。 • ·点一点(除CONTA178)和点-面接触单元需要为罚刚
度KN输入绝对值: • -初始估计时: • 对于大变形: 0.1*E < KN < 1.0*E • 对于弯曲: 0.01*E < KN < 0.1*E • E 为弹性模量
ANSYS 高级接触问题
• 接触问题概述 • 在工程中会遇到大量的接触问题,如齿轮的啮合、法兰
联接、机电轴承接触、卡头与卡座、密封、板成形、冲 击等等。接触是典型的状态非线性问题,它是一种高度 非线性行为。接触例子如图1:
• 分析中常常需要确定两个或多个相互接触 物体的位移、接触区域的大小和接触面上 的应力分布。
触
• 3. 点-点接触单元用于模拟单点和另一个确定点 之间的接触。
• -建立模型时必须事先知道确切的接触位置;
• -多个点-点接触单元可以模拟两个具有多个单 元表面间的接触;
• ·每个表面的网格必须是相同的; • ·相对滑动必须很小; • ·只对小的转动响应有效。
• 例如: 点一点接触可以模拟一些面的接触。如地 基和土壤的接触
• 3、选取接触刚度的指导:
• Step 1.开始采用较小的刚度值 • Step 2.对前几个子步进行计算 • Step 3.检查穿透量和每一个子步中的平衡迭代次数
• ·在粗略的检查中,如以实际比例显示整个模型时就能观察到穿透, 则穿透可能太大了,需要提高刚度重新分析。
• ·如果收敛的迭代次数过多(或未收敛),降低刚度重新分析。 • 注意:罚刚度可以在载荷步间改变,并且可以在重启动中调整。 • 牢记:接触刚度是同时影响计算精度和收敛性的最重要的参数。如
Ansys接触分析和设置
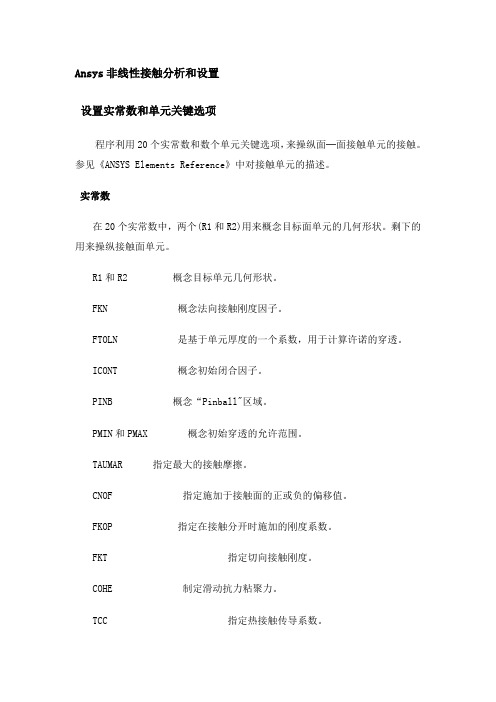
Ansys非线性接触分析和设置设置实常数和单元关键选项程序利用20个实常数和数个单元关键选项,来操纵面─面接触单元的接触。
参见《ANSYS Elements Reference》中对接触单元的描述。
实常数在20个实常数中,两个(R1和R2)用来概念目标面单元的几何形状。
剩下的用来操纵接触面单元。
R1和R2 概念目标单元几何形状。
FKN 概念法向接触刚度因子。
FTOLN 是基于单元厚度的一个系数,用于计算许诺的穿透。
ICONT 概念初始闭合因子。
PINB 概念“Pinball"区域。
PMIN和PMAX 概念初始穿透的允许范围。
TAUMAR 指定最大的接触摩擦。
CNOF 指定施加于接触面的正或负的偏移值。
FKOP 指定在接触分开时施加的刚度系数。
FKT 指定切向接触刚度。
COHE 制定滑动抗力粘聚力。
TCC 指定热接触传导系数。
FHTG 指定摩擦耗散能量的热转换率。
SBCT 指定 Stefan-Boltzman 常数。
RDVF 指定辐射观看系数。
FWGT 指定在接触面和目标面之间热散布的权重系数。
FACT 静摩擦系数和动摩擦系数的比率。
DC 静、动摩擦衰减系数。
命令: RGUI:main menu> preprocessor>real constant对实常数 FKN, FTOLN, ICONT, PINB, PMAX, PMIN, FKOP 和 FKT,用户既能够概念一个正值,也能够概念一个负值。
程序将正值作为比例因子,将负值作为绝对值。
程序将下伏单元的厚度作为ICON,FTOLN,PINB,PMAX 和 PMIN 的参考值。
例如 ICON = 说明初始闭合因子是“*基层单元的厚度”。
但是,ICON = 那么表示真实调整带是单位。
若是下伏单元是超单元,那么将接触单元的最小长度作为厚度。
参见图5-8。
图5-8 基层单元的厚度在模型中,若是单元尺寸转变专门大,而且在实常数如 ICONT, FTOLN, PINB, PMAX, PMIN 中应用比例系数,那么可能会显现问题。
基于ANSYS有限元软件的直齿轮接触应力分析

基于ANSYS有限元软件的直齿轮接触应力分析一、本文概述随着现代机械工业的飞速发展,齿轮作为机械设备中的关键传动元件,其性能的稳定性和可靠性对于设备的长期运行和维护至关重要。
直齿轮作为齿轮传动的一种基本形式,其接触应力的分布与大小直接影响着齿轮的工作性能和使用寿命。
因此,对直齿轮接触应力的深入研究与分析,对于提高齿轮的设计水平、优化制造工艺以及提升设备的整体性能具有重要意义。
本文旨在利用ANSYS有限元软件对直齿轮的接触应力进行分析。
简要介绍了直齿轮的基本结构和传动原理,阐述了接触应力分析的必要性和重要性。
详细阐述了ANSYS有限元软件在齿轮接触应力分析中的应用,包括建模、网格划分、材料属性设定、接触设置、求解及后处理等关键步骤。
通过实例分析,展示了ANSYS软件在直齿轮接触应力分析中的具体操作流程,并对分析结果进行了详细的解读。
总结了利用ANSYS进行直齿轮接触应力分析的优势和局限性,并对未来的研究方向进行了展望。
本文旨在为齿轮设计师和工程师提供一种有效的直齿轮接触应力分析方法,帮助他们更好地理解直齿轮的应力分布特性,优化齿轮设计,提高齿轮的工作性能和可靠性。
本文也为相关领域的学者和研究人员提供了一种有益的参考和借鉴。
二、直齿轮接触应力的理论基础在直齿轮传动过程中,接触应力是决定齿轮使用寿命和性能的关键因素之一。
因此,对其进行准确的接触应力分析至关重要。
接触应力的分析主要基于弹性力学、材料力学和摩擦学的基本理论。
弹性力学是研究弹性体在外力作用下变形和应力分布规律的学科。
在直齿轮接触问题中,通常假设齿轮材料为线性弹性材料,满足胡克定律。
齿轮在啮合过程中,由于接触力的作用,齿面会产生弹性变形,进而产生接触应力。
材料力学是研究材料在受力作用下的应力、应变和强度等性能表现的学科。
对于直齿轮,材料的选择对齿轮的接触应力分布和承载能力有重要影响。
通常,齿轮材料需要具备较高的弹性模量、屈服强度和疲劳强度等。
基于ANSYS的圆锥齿轮参数化建模及接触分析_韩兴乾
96
机械传动
Байду номын сангаас
2013 年
面, 生成规则网格。网格划分时, 对计算精度贡献较大 的部分的网格应细化, 而适当粗划对计算精度贡献不 大的部分。综合考虑以上因素及直齿圆锥齿轮的几何 特征, 对齿部细分网格, 其他部分采用相对较稀的网 格, 如图 3 所示。
化, 齿轮的实体模型和有限元模型很相似, 使得齿轮模 型的建立具有很大的重复性。因此, 如能建立齿轮的参 数化模型就能大大减少工作量, 提高工作效率。本文中 齿轮参数化建模思想是: 先基于齿轮基本参数建立一对 啮合齿轮, 划分好网格之后, 将主动齿轮和从动齿轮分 别旋转复制, 再将各齿轮节点和关键点融合, 形成整体 齿轮接触有限元模型。具体建模过程如下所述。
由于从动齿轮齿数较少, 采用轴齿轮的形式, 且考虑 到划分网格的需要, 从动齿轮分成 3 部分分别建模, 建模 方法与主动齿轮相类似[ 2] 。整对齿轮模型如图 2 所示。
图 1 啮合圆锥齿轮的几何尺寸
图 2 一对啮合齿轮模型
1. 2 定义单元类型和材料属性 首 先, 选 择 PLANE42 单 元 作 为 二 维 单 元。
图 4 部分模型的扩展
1. 5 定义接触对 采用面 面接触单元对齿轮进行三维接触分析,
由于小齿轮的齿面曲率比大齿轮的大, 所以小齿轮的 齿面是目标面, 大齿轮的齿面是接触面[ 4] 56- 57。对于 实常数的 设置, ANSYS 同 样提 供了较 简便 的 GUI 方 式: Preprocessor > Real Constants> Add/ Edit/ Delete, 在弹 出的 Real Constants 对话框中选择 CONTA 174 单元, 点 击 Edit, 弹 出/ Real Constant Set Number 3, For CONTA 1740对话框, 在其中可以设置接触分析的各项实常数。 1. 6 接触分析载荷及边界条件的施加
有限元分析软件ANSYS命令流中文说明)
有限元分析软件ANSYS命令流中文说明)有限元分析软件ANSYS命令流中文说明CommandVSBV, NV1, NV2, SEPO, KEEP1, KEEP2 — Subtracts volumes from volumes,用于2个solid相减操作,最终目的是要nv1-nv2=?通过后面的参数设置,可以得到很多种情况:sepo项是2个体的边界情况,当缺省的时候,是表示2个体相减后,其边界是公用的,当为sepo的时候,表示相减后,2个体有各自的独立边界。
keep1与keep2是询问相减后,保留哪个体?当第一个为keep时,保留nv1,都缺省的时候,操作结果最终只有一个体,比如:vsbv,1,2,sepo,,keep,表示执行1-2的操作,结果是保留体2,体1被删除,还有一个1-2的结果体,现在一共是2个体(即1-2与2),且都各自有自己的边界。
如vsbv,1,2,,keep,,则为1-2后,剩下体1和体1-2,且2个体在边界处公用。
同理,将v换成a及l是对面和线进行减操作!mp,lab, mat, co, c1,…….c4 定义材料号及特性lab: 待定义的特性项目(ex,alpx,reft,prxy,nuxy,gxy,mu,dens)ex: 弹性模量nuxy: 小泊松比alpx: 热膨胀系数reft: 参考温度reft: 参考温度prxy: 主泊松比gxy: 剪切模量mu: 摩擦系数dens: 质量密度mat: 材料编号(缺省为当前材料号)c 材料特性值,或材料之特性,温度曲线中的常数项c1-c4: 材料的特性-温度曲线中1次项,2次项,3次项,4次项的系数定义DP材料:首先要定义EX和泊松比:MP,EX,MAT,……MP,NUXY,MAT,……定义DP材料单元表(这里不考虑温度):TB,DP,MAT进入单元表并编辑添加单元表:TBDATA,1,CTBDATA,2,ψTBDATA,3,……如定义:EX=1E8,NUXY=0.3,C=27,ψ=45的命令如下:MP,EX,1,1E8MP,NUXY,1,0.3TB,DP,1TBDATA,1,27TBDATA,2,45这里要注意的是,在前处理的最初,要将角度单位转化到“度”,即命令:*afun,degVSEL, Type, Item, Comp, VMIN, VMAX, VINC, KSWPType,是选择的方式,有选择(s),补选(a),不选(u),全选(all)、反选(inv)等,其余方式不常用Item, Comp 是选取的原则以及下面的子项如 volu 就是根据实体编号选择,loc 就是根据坐标选取,它的comp就可以是实体的某方向坐标!其余还有材料类型、实常数等MIN, VMAX, VINC,这个就不必说了吧!,例:vsel,s,volu,,14vsel,a,volu,,17,23,2上面的命令选中了实体编号为 14,17,19,21,23的五个实体VDELE, NV1, NV2, NINC, KSWP: 删除未分网格的体nv1:初始体号nv2:最终的体号ninc:体号之间的间隔kswp=0:只删除体kswp=1:删除体及组成关键点,线面如果nv1=all,则nv2,ninc不起作用其后面常常跟着一条显示命令VPLO,或aplo,nplo,这个湿没有参数的命令,输入后直接回车,就可以显示刚刚选择了的体、面或节点,很实用的哦!Nsel, type, item, comp, vmin, vmax, vinc, kabs 选择一组节点为下一步做准备Type: S: 选择一组新节点(缺省)R: 在当前组中再选择A: 再选一组附加于当前组U: 在当前组中不选一部分All: 恢复为选中所有None: 全不选Inve: 反向选择Stat: 显示当前选择状态Item: loc: 坐标node: 节点号Comp: 分量Vmin,vmax,vinc: ITEM范围Kabs: “0” 使用正负号“1”仅用绝对值下面是单元生死第一个载荷步中命令输入示例:!第一个载荷步TIME,... !设定时间值(静力分析选项)NLGEOM,ON !打开大位移效果NROPT,FULL !设定牛顿-拉夫森选项ESTIF,... !设定非缺省缩减因子(可选)ESEL,... !选择在本载荷步中将不激活的单元EKILL,... !不激活选择的单元ESEL,S,LIVE !选择所有活动单元回复:(AaronSpark)有限元分析软件ANSYS命令流中文说...破坏准则如果kmod为strain,且temp为空,则其后tbdata数据为mkin 中特性。
ansys齿轮模态分析命令流

FITEM,2,9
LGLUE,P51X
!把齿顶上的两条线加起来,成为一条线
FLST,2,2,4,ORDE,2
FITEM,2,5
FITEM,2,-6
LCOMB,P51X, ,0
!在柱坐标系下进行复制线
!将激活的坐标系设置为总体柱坐标系
CSYS,1
FLST,3,5,4,ORDE,2
FITEM,3,1
FITEM,3,-5
LGEN,10,P51X, , , ,36, , ,0
!把齿底上的所有线粘接起来
FLST,2,2,4,ORDE,2
FITEM,2,38
FITEM,2,41
LGLUE,P51X
KWPAVE, 110
!旋转工作平面
wprot,-50,0,0
!将激活的坐标系设置为工作平面坐标系
CSYS,4
!建立第二个关键点
K,2,10.489,0,,
!激活的坐标系设置为总体柱坐标系
CSYS,1
!建立其余的辅助点
K,120,12.5,44.5,,
CSYS,4
!建立第三个关键点
K,3,12.221,0,,
!将工作平面平移到第三个辅助点
KWPAVE, 130
!旋转工作平面
wprot,4.5,0,0
!建立第四个关键点
K,4,14.182,0,,
!将工作平面平移到第四个辅助点
KWPAVE, 140
K,10,15,-8.13,,
!在柱面坐标系中创建圆弧线
LSTR, 10, 1
LSTR, 1, 2
LSTR, 2, 3
ANSYS齿轮建模命令流
Finish$/clear$/prep7M=5$z=55$refa=20Hax=1$cx=0.25Rouf=0.38*m$ks=6Ha=hax*m$hf=(hax+cx)*m Pi=acos(-1)D=m*zDb=d*cos(refa*pi/180) Da=d+2*ha$df=d-2*hf Alfad=acos(db/da)*if,db,gt,df,thenAlfag=0.0$*elseAlfag=acos(db/df)$*endif B=0.22*dDta=6*mDax=d/5D2=1.6*daxD1=0.25*(da-2*dta-d2)D0=0.5*(da-2*dta+d2)C=0.3*bNj=0.5*m$nj1=0.5*mR=5S=1.5*daxCsys,1$n=20*do,i,1,nAlfai=alfag+((alfad-alfag)/(n-1))*(i-1) Roui=0.5*db/cos(alfai)Ctai=tan(alfai)-alfaiK,i,roui,ctai*180/pi$*enddo*do,i,1,n-1$l,i,i+1$*enddoCtai=(tan(refa*pi/180)-refa*pi/180)*180/pi Ctai=ctai+360/(4*z)Lgen,,all,,,,-ctai,,,,1Csys,0*if,db,gt,df,thenK,n+1,kx(1)-(db-df)/2,ky(1)L,1,n+1$*endifLcomb,all$numcmp,allLsymm,y,allCsys,1K,5,0.5*df,360/(2*z)K,6,0.5*df,-360/(2*z)Kp1=knear(6)$l,6,kp1Kp1=knear(5)$l,5,kp1Lfillt,1,3,rouf$lfillt,2,4,roufKsel,s,loc,x,da/2*get,kp1,kp,0,num,minKp2=kpnext(kp1)$l,kp1,kp2AllselNumcmp,allLgen,z,all,,,,360/zNummrg,kp$al,allCyl4,,,da/2-0.5*(dta+ha+hf)Asba,1,2$numcmp,allCsys,0$agen,1,1,,,,,b/2,,,1*get,kp0,kp,0,num,maxK,kp0+1,0,dax/2$k,kp0+2,0,dax/2,s/2-nj1$k,kp0+3,0,dax/2+nj1,s/2K,kp0+4,0,d2/2-nj,s/2$k,kp0+5,0,d2/2,s/2-nj$k,kp0+6,0,d2/2,c/2K,kp0+7,0,da/2-dta,c/2$k,kp0+8,0,da/2-dta,b/2-nj$k,kp0+9,0,da/2-dta+nj,b/2 K,kp0+10,0,da/2-0.5*(dta+ha+hf),b/2$k,kp0+11,0,da/2-0.5*(dta+ha+hf)*do,i,1,10$l,kp0+i,kp0+i+1$*enddoLsel,s,loc,x,0Lsel,r,loc,y,d2/2,da/2-dta-0.01L2=lsnext(l1)Lfillt,l1,l2,rLsel,s,loc,x,0Lsel,r,loc,y,dax/2,da/2-0.5*(dta+ha+hf) Lsymm,z,allNummrg,kp$numcmp,allAl,all*get,kp0,kp,0,num,maxK,kp0+100,,,b/2$k,kp0+101,,,-b/2 Vrotat,2,,,,,,kp0+100,kp0+101,,ks L,kp0+100,kp0+101*get,l1,line,0,num,maxVdrag,1,,,,,,l1AllselNummrg,all$numcmp,allCm,v1cm,volu*afun,deg$wpoff,,,-bX0=d0/2*sin(180/ks)Y0=d0/2*cos(180/ks)Cyl4,x0,y0,d1/2,,,,2*bWpcsysCsys,1Vgen,ks,v1,,,,360/ks Cmsel,u,v1cm Cm,v2cm,volu AllselVsbv,v1cm,v2cm/view,1,1,1,1$vplot。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FITEM,5,180
FITEM,5,-181
FITEM,5,187
FITEM,5,211
FITEM,5,-212
FITEM,5,216
FITEM,5,-217
FITEM,5,242
FITEM,5,-243
FITEM,5,248
FITEM,5,-249
ESEL,R,REAL,,3
CMSEL,A,_NODECM
CMDEL,_NODECM
CMSEL,A,_ELEMCM
CMDEL,_ELEMCM
CMSEL,S,_KPCM
CMDEL,_KPCM
CMSEL,S,_LINECM
CMDEL,_LINECM
CMSEL,S,_AREACM
MP,NUXY,1,0.3
MP,EX,2,400000
MP,NUXY,2,0.3
TYPE, 1
MAT, 1
REAL,
ESYS, 0
SECNUM,
!*
SMRT,3
MSHAPE,0,2D
MSHKEY,0
AMESH,3
MP,MU,1,0.2
MAT,1
R,3
REAL,3
ET,2,169
ET,3,172
KEYOPT,3,9,0
KEYOPT,3,10,2
R,3,
RMORE,
RMORE,,0
RMORE,0
! Generate the target surface
LSEL,S,,,1
*dim,alfa,array,10
*dim,rk,array,10
*dim,theta,array,10
*dim,fai,array,10
*do,i,1,10
alfa(i)=(alfa_f+((alfa_a-alfa_f)/9)*(i-1))*pi/180 !每条渐开线上生成10各关键点所对应的压力角大小(用弧表示)
*enddo
CSYS,1
*do,i,1,10
k,i,rk(i),fai(i)
*enddo
ksel,all
BSPLIN,ALL !绘制齿廓线
csys,0
LSYMM,Y,1
K,30000
LARC,10,12,30000,da/2
csys,1
LSEL,Aபைடு நூலகம்L
FITEM,5,882
FITEM,5,-883
FITEM,5,895
FITEM,5,903
FITEM,5,-904
FITEM,5,922
FITEM,5,941
FITEM,5,961
FITEM,5,967
FITEM,5,-968
FITEM,5,982
FITEM,5,1000
NSLL,S,1
ESLN,S,0
ESURF
CMSEL,S,_ELEMCM
! Generate the contact surface
LSEL,S,,,264
LSEL,A,,,265
LSEL,A,,,266
LSEL,A,,,267
LSEL,A,,,268
LSEL,A,,,269
ESEL,ALL
ESEL,S,TYPE,,2
ESEL,A,TYPE,,3
ESEL,R,REAL,,3
/PSYMB,ESYS,1
/PNUM,TYPE,1
/NUM,1
EPLOT
ESEL,ALL
ESEL,S,TYPE,,2
ESEL,A,TYPE,,3
/prep7
!单位是n,和mm
!先建立两个齿轮模型(没又齿根过渡线,只适合基圆半径小于齿根圆的情况)
m=4 !齿轮模数
z1=45 !齿轮齿数
pi=3.1415926
ang=20 !分度圆上的压力角
ha_c=1 ! 齿顶高系数
c_c=0.25 !顶隙系数
ha=ha_c*m !齿顶高
!*
MAT, 2
AMESH,1
FLST,5,90,2,ORDE,73
FITEM,5,5
FITEM,5,-6
FITEM,5,61
FITEM,5,-62
FITEM,5,83
FITEM,5,-84
FITEM,5,89
FITEM,5,-90
FITEM,5,145
fai_s=s/d
alfa_a=acos(db/da)*180/pi !齿顶圆压力角(角度表示)
alfa_f=acos(db/df)*180/pi !齿根圆压力角(角度表示)
dfr=0.38*m !齿根圆角半径
!b=0.012 !齿宽
deata_ang=360/z1 !齿轮两齿间的夹角
LSEL,A,,,270
LSEL,A,,,271
LSEL,A,,,272
LSEL,A,,,273
LSEL,A,,,274
LSEL,A,,,275
LSEL,A,,,276
LSEL,A,,,277
LSEL,A,,,278
LSEL,A,,,279
LSEL,A,,,280
LSEL,A,,,281
LSEL,A,,,132
LSEL,A,,,133
LSEL,A,,,134
LSEL,A,,,135
LSEL,A,,,136
LSEL,A,,,137
LSEL,A,,,138
LSEL,A,,,178
LSEL,A,,,179
LSEL,A,,,180
CM,_TARGET,LINE
TYPE,2
hf=(ha_c+c_c)*m !齿根高
d=m*z1 !分度圆直径
db=d*cos(ang*pi/180) !基圆直径
da=d+2*ha !齿顶圆直径
df=d-2*hf !齿根圆直径
x=0
s=pi*m/2+2*x*m*tan(ang*pi/180) !分度圆齿厚
theta_s=tan(ang*pi/180)-ang*pi/180
LSEL,A,,,2
LSEL,A,,,3
LSEL,A,,,4
LSEL,A,,,5
LSEL,A,,,6
LSEL,A,,,7
LSEL,A,,,8
LSEL,A,,,9
LSEL,A,,,10
LSEL,A,,,128
LSEL,A,,,130
LSEL,A,,,131
FITEM,5,-1312
FITEM,5,1343
FITEM,5,-1346
FITEM,5,1350
FITEM,5,-1351
CM,_Y,ELEM
ESEL, , , ,P51X
CM,_Y1,ELEM
CMSEL,S,_Y
CMDELE,_Y
!*
CMDEL,_AREACM
CMSEL,S,_VOLUCM
CMDEL,_VOLUCM
/GRES,cwz,gsav
CMDEL,_TARGET
CMDEL,_CONTACT
NROPT,UNSYM
LOCAL,11,1,180,0,0, , , ,1,1,
EPLOT
*enddo
*do,i,1,10
rk(i)=(db/2)/cos(alfa(i))
theta(i)=tan(alfa(i))-alfa(i) !弧度表示
*enddo
*do,i,1,10
fai(i)=(theta_s+fai_s-theta(i))*180/pi !角度
FITEM,2,3269
FITEM,2,-3352
NROTAT,P51X
FINISH
/SOL
FLST,2,88,1,ORDE,4
FITEM,2,2815
FITEM,2,-2818
FITEM,2,3269
FITEM,2,-3352
!*
/GO
D,P51X, ,0, , , ,UX, , , , ,
ALLSEL,ALL
EPLOT
!*
!*
OUTRES,ALL,ALL,
!*
TIME,1
AUTOTS,-1
DELTIM,0.05,0.05,0.05,1
FITEM,2,635
FITEM,2,-718
NROTAT,P51X
FINISH
/SOL
FLST,2,88,1,ORDE,4
FITEM,2,181
FITEM,2,-184
FITEM,2,635
FITEM,2,-718
!*
/GO
D,P51X, , , , , ,UX, , , , ,
LGEN,Z1,ALL,,,0,-deata_ang
kpoint=10+1
*do,i,1,z1-1,1
larc,kpoint,kpoint+2,30000,df/2
kpoint=kpoint+4
*enddo
larc,187,1,30000,df/2
LSEL,ALL
AL,ALL
FLST,2,88,1,ORDE,4
FITEM,2,181
FITEM,2,-184