全景图像拼接技术研究现状综述
图像拼接调研报告
图像拼接的调研报告1.图像拼接的意义和国内外研究现状1.1 意义图像拼接(image mosaic)技术是将一组相互间存在重叠部分的图像序列进行空间配准,经重采样融合后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。
图像拼接是数字图像处理领域的一个重要的研究方向,在摄影测量学、计算机视觉、遥感图像分析、计算机图形等领域有着广泛的应用价值。
图像拼接技术一个日益流行的研究领域,是虚拟现实、计算机视觉、计算机图形学和图像处理等领域的重要研究课题,在宇宙空间探测、海底勘测、医学、气象、地质勘测、军事、视频压缩和传输、视频的索引和检索、物体的3D重建、军事侦察和公安取证、数码相机的超分辨率处理等领域都有广泛的应用。
因此,图像拼接技术的研究具有很好的应用前景和实际应用价值。
1.2 国内外研究现状。
关于图像拼接的方法国内外已有不少的论文发表,其算法大致可分为基于模型的方法,基于变换域的方法,基于灰度相关的方法和基于特征的方法,而如何提高图像拼接的效率,减少处理时间和增强拼接系统的适应性一直是研究的重点。
①基于模型:1996年,微软研究院的Richard Szeliski提出了一种2D空间八参数投影变换模型,采用Levenberg-Marquardt迭代非线性最小化方法(简称L-M算法)求出图像间的几何变换参数来进行图像配准。
这种方法在处理具有平移、旋转、仿射等多种变换的待拼接图像方面效果好,收敛速度快,因此成为图像拼接领域的经典算法,但是计算量大,拼接效果不稳定。
2000年,Shmuel Peleg等人在Richard Szeliski的基础上做了进一步的改进,提出了自适应图像拼接模型,根据相机的不同运动而自适应选择拼接模型,通过把图像分成狭条进行多重投影来完成图像的拼接。
这一研究成果推动了图像拼接技术的进一步的发展,从此自适应问题成为图像拼接领域新的研究热点。
匹兹堡大学的Sevket Gumustekin对消除在固定点旋转摄像机拍摄自然景物时形成的透视变形和全景图像的拼接进行了研究。
图像处理技术的研究现状和发展趋势

图像处理技术的研究现状和发展趋势庄振帅数字图像处理又称为计算机图像处理,它是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
数字图像处理最早出现于20世纪50年代,当时的电子计算机已经发展到一定水平,人们开始利用计算机来处理图形和图像信息。
数字图像处理作为一门学科大约形成于20世纪60年代初期。
早期的图像处理的目的是改善图像的质量,它以人为对象,以改善人的视觉效果为目的。
图像处理中,输入的是质量低的图像,输出的是改善质量后的图像,常用的图像处理方法有图像增强、复原、编码、压缩等。
首次获得实际成功应用的是美国喷气推进实验室(JPL)。
他们对航天探测器徘徊者7号在1964年发回的几千张月球照片使用了图像处理技术,如几何校正、灰度变换、去除噪声等方法进行处理,并考虑了太阳位置和月球环境的影响,由计算机成功地绘制出月球表面地图,获得了巨大的成功。
随后又对探测飞船发回的近十万张照片进行更为复杂的图像处理,以致获得了月球的地形图、彩色图及全景镶嵌图,获得了非凡的成果,为人类登月创举奠定了坚实的基础,也推动了数字图像处理这门学科的诞生。
在以后的宇航空间技术,如对火星、土星等星球的探测研究中,数字图像处理都发挥了巨大的作用。
数字图像处理取得的另一个巨大成就是在医学上获得的成果。
1972年英国EMI公司工程师Housfield发明了用于头颅诊断的X射线计算机断层摄影装置,也就是我们通常所说的CT(Computer Tomograph)。
CT的基本方法是根据人的头部截面的投影,经计算机处理来重建截面图像,称为图像重建。
1975年EMI公司又成功研制出全身用的CT装置,获得了人体各个部位鲜明清晰的断层图像。
1979年,这项无损伤诊断技术获得了诺贝尔奖,说明它对人类作出了划时代的贡献。
与此同时,图像处理技术在许多应用领域受到广泛重视并取得了重大的开拓性成就,属于这些领域的有航空航天、生物医学过程、工业检测、机器人视觉、公安司法、军事制导、文化艺术等,使图像处理成为一门引人注目、前景远大的新型学科。
全景图像拼接技术综述与改进

全景图像拼接技术综述与改进概述:全景图像拼接技术是指将多张相互有重叠区域的图像通过某种算法的处理,合成为一张无缝衔接的全景图像的过程。
全景图像拼接技术在虚拟现实、摄影、地理信息系统等领域具有广泛应用。
本文将对全景图像拼接技术的原理、算法以及当前的改进方法进行综述。
一、全景图像拼接技术的原理全景图像拼接技术的实现主要包含以下几个步骤:1. 特征提取与匹配:通过检测图像中的特征点,并计算特征描述子,从而实现不同图像之间的特征匹配。
2. 图像对齐:通过特征点匹配结果,确定图像之间的相对位置关系,并进行图像的配准,使得其能够对齐。
3. 图像融合:将对齐后的图像进行融合,消除拼接边缘的不连续性,实现无缝衔接的全景图像输出。
二、当前的全景图像拼接算法1. 基于特征点的算法:例如SIFT(尺度不变特征变换)和SURF(加速稳健特征)算法,通过提取图像的局部特征点,并进行匹配。
这种算法能够识别出旋转、尺度和视角变化,但对于大尺度图像的拼接效果有限。
2. 基于全局变换的算法:例如全景图像的球面投影映射(Spherical Projection Mapping)算法和全景图像的柱面投影映射(Cylindrical Projection Mapping)算法。
这些算法通过将图像映射为球面或柱面,并进行参数化变换来实现图像的拼接,能够处理大尺度图像,但在局部区域的拼接上可能存在一定的失真。
3. 基于深度学习的算法:近年来,深度学习技术在图像处理领域取得了重大突破。
通过使用深度卷积神经网络,如Pix2Pix和CycleGAN等模型,能够将拼接任务转化为图像到图像的转换问题,取得了较好的拼接效果。
三、全景图像拼接技术的改进方法1. 自动拼接线选取算法:采用自适应拼接线选取算法,根据特征点的分布和拼接图像的几何结构,自动选择合适的拼接线,减少拼接过程中的人工干预,提高拼接效率和准确性。
2. 拼接失真校正算法:解决基于全局变换的算法中局部区域存在的失真问题。
基于深度学习的全景图像拼接技术研究

基于深度学习的全景图像拼接技术研究随着科技的飞速发展,相机成为了我们日常生活中最为普遍的物品之一,拍摄照片也已经成为了人们生活中不可或缺的一部分。
而全景图像拼接技术就是在这样一个背景下逐渐走入人们的视野。
它利用图像处理技术,将多张不同角度或位置的图片拼接到一起,生成一个完整的全景图像。
本文将探讨基于深度学习的全景图像拼接技术,从理论到实践,从优点到缺点剖析这一技术。
一、基本原理全景图像拼接技术是将多张图片进行拼接,形成一个整体,使其具有一定的连续性和逼真度。
全景图像拼接技术的基本原理是利用摄像机捕捉连续的局部图像,然后将这些图像进行拼接。
在全景拼接中,最常用的方法是通过计算机程序将多幅图像进行配准,然后通过图像拼接技术将这些图像无缝拼接实现全景效果。
二、基于深度学习的全景图像拼接技术研究现状近年来,随着深度学习技术的不断发展,其在图像处理方面也得到了广泛的应用。
基于深度学习的全景图像拼接技术,尤其是卷积神经网络和生成对抗网络等技术的应用,大大提高了全景图像拼接的效果和速度。
在基于深度学习的全景图像拼接技术研究方面,不管是视角的拼接还是场景的拼接,都有很多成果。
例如,有一种名为DeepImageMeld的方法,它利用全景模板和深度图像将多张图片进行配准和拼接,从而产生了一些令人惊叹的结果。
同样,Swirski等人所提出的方法也可以将多张图片配准在一起,并在拼接过程中考虑到了姿态和光照的变化,从而实现更好的拼接效果和更完整的场景。
除了这些方法之外,还有一些其他的方法,如图像融合和全景运动重建等方法,都可以在一定程度上提高全景图像拼接效果。
三、基于深度学习的全景图像拼接技术的优点基于深度学习的全景图像拼接技术有很多优点。
首先,这种技术可以大幅提高全景图像拼接的效果和速度。
其次,这种技术能够自动进行图像配准、调整和拼接,减少了大量人工干预。
此外,基于深度学习的全景图像拼接技术在应对图像下采样和噪声等问题时也有所优势。
基于SIFT的全景图像拼接方法研究
基于SIFT的全景图像拼接方法研究全景图像拼接主要解决由于普通成像设备视角限制,难以拍摄到高分辨率大视场图像的问题。
本文以具有平移、旋转、尺度变换、视角变换及复杂变化的图像作为研究对象,借助经典SIFT算法的良好鲁棒性,设计了针对序列图像的SIFT 配准方法,并进行了实验验证。
实验结果表明:改进后的算法不仅能缩短拼接时间,还具有较高的正确匹配率。
标签:全景图像拼接改进意义一、基于SIFT的全景图像拼接的研究意义全景图像拼接是指把一系列拥有重叠区域的局部图像通过图像配准、图像变换和图像融合拼合成一大幅高清晰并且无明显接缝的全局图像。
其能够很好地解决成像场景的视角范围与分辨率间难以共存的问题,被广泛地应用在碎片图像合成、虚拟现实等领域[1]。
然而,用于拼接的图像间仅有一部分重叠区域,特征匹配对也只会在这个重叠区域内建立,与重叠区域外特征点匹配只会增加建立错误匹配对的可能并增加匹配时间。
针对现有的因提取整幅图像特征而导致算法计算量大、非重叠区域特征容易造成后续匹配错误和计算冗余等问题,设计了本文的算法,以求在降低匹配计算量的同时有效降低误匹配率。
二、基于SIFT的全景图像拼接算法改进由于SIFT特征性能卓越,在图像发生平移、旋转、缩放、亮度变化时能保持良好不变性,且对视角变化、仿射变换、噪声也保持一定程度的稳定性,所以通用性很强。
但SIFT特征应用于图像拼接时存在大量冗余,导致运算量大,并且在非重叠区域的特征点容易出现匹配错误[2]。
而用于提纯匹配点的RANSAC 算法是以每次随机抽取初步匹配点样本来计算模型参数,以至于会导致迭代次数偏多,带来运算量偏大大的问题。
基于以上考虑,本文设计的改进算法的执行步骤如下:1.首先将两幅拥有重叠区域的序列图像I1和I2分别提取SIFT特征点;2.在图像中I1,选取与图像I2相邻的边缘区域(文中设定边缘区域宽为200像素)内的SIFT特征点,跟图像I2中的特征点建立匹配对,然后记录在图像I2中对应点,进行直线拟合得到直线I1,这样直线I1将图像I2分成了两块区域,与图像边缘围成的区域就是初始重叠区域H1;3.用同样的方法反向匹配,在图像I1中获得对应直线I2和初始的重叠区域H2;4.最后仅在建立的初始重叠区域H1和H2中寻找匹配对,建立两幅图像的对应关系(参数变换模型)。
全景视频实时拼接技术研究与实现

全景视频实时拼接技术探究与实现1. 引言随着虚拟现实技术的蓬勃进步,全景视频越来越受到人们的喜爱。
全景视频能够给观众带来身临其境的感觉,以全景的方式呈现场景,使观众感觉自己置身于其中。
然而,在实时拼接全景视频方面,仍存在许多挑战。
本文旨在解决这一问题,提出一种全景视频实时拼接技术,以实现高效、高质量的全景视频拼接。
2. 相关技术探究2.1 图像采集全景视频拼接的第一步是对场景进行图像采集。
采集设备通常接受鱼眼相机或全景相机,通过广角镜头实现较大范围的图像拍摄。
采集设备的参数设置对后续的图像处理具有重要影响,需要依据详尽应用场景进行合理调整。
2.2 特征提取与匹配在实时拼接全景视频过程中,需要对采集的图像进行特征提取与匹配。
常用的特征提取算法有SIFT、SURF等,通过对图像进行关键点提取,并计算关键点的描述子,实现图像的特征表示。
在特征匹配阶段,通过计算特征匹配得分,确定不同图像之间的对应干系。
2.3 图像拼接算法基于特征匹配的图像拼接算法是实现全景视频拼接的核心。
常见的图像拼接算法有基于特征点的RANSAC算法、基于图像金字塔的平面拼接算法等。
在拼接过程中,需要思量图像的对齐、光照调整、边缘平滑等问题,以实现无缝拼接的效果。
3. 全景视频实时拼接技术为了实现全景视频的实时拼接,本文提出了一种基于快速特征提取和匹配的全景视频实时拼接技术。
该技术主要包括以下步骤:(1)预处理:对采集的图像进行预处理,如去噪、图像增强等,以提高后续特征提取与匹配的准确性。
(2)特征提取与匹配:接受快速特征提取算法对图像进行关键点提取,并计算关键点的描述子。
通过特征匹配算法,确定不同图像之间的对应干系。
(3)图像拼接:依据特征匹配结果,进行图像的对齐、光照调整、边缘平滑等处理,实现全景图像的拼接。
(4)实时实现:为了保证全景视频的实时性,需要对算法进行优化和加速,如接受多线程并行计算、GPU加速等技术手段。
4. 试验与结果分析为验证本文提出的全景视频实时拼接技术的可行性和有效性,进行了一系列试验。
航空照相机的全景图像拼接技术
航空照相机的全景图像拼接技术随着无人机技术的快速发展,航空照相机作为无人机上的重要组成部分,越来越被广泛应用于航空摄影、地理测绘、农业科学等领域。
而其中一项关键技术——航空照相机的全景图像拼接技术,则成为了许多专业摄影师和测绘工作者所关注和探索的重点。
全景图像拼接技术是指将多幅局部重叠的照片通过计算机算法进行自动拼接,生成一幅无缝衔接的大尺寸全景图像的过程。
这项技术的发展,使得我们可以更好地捕捉和保存大范围的景观,更准确地记录和表达真实世界的细节和信息。
航空照相机的全景图像拼接技术的关键在于如何实现照片之间的准确定位和重叠区域的自动识别。
在航空摄影中,由于无人机在拍摄过程中会发生姿态变化和高度变化,这就造成了照片之间的尺度差异和视角变化,在进行图像拼接时增加了一定的难度。
为了解决这一问题,研究人员提出了多种算法和方法。
其中,图像特征点匹配是一种常用的方法。
该方法通过寻找图像中的关键点,并计算关键点的描述子,然后通过匹配关键点和描述子来找到对应的点,从而实现图像的对齐和融合。
此外,还可以利用传感器数据、GPS信息和惯性导航系统等,提高航空照相机姿态、位姿的估计精度,进一步优化图像拼接的结果。
除了关键点匹配,多图像融合算法也是实现航空照相机全景图像拼接的重要手段之一。
该算法通过对多幅图像进行颜色、亮度、对比度等方面的调整,使得图像在拼接后具有一致的外观。
同时,还可以采用多重融合方法,将不同的图像特征和信息进行优化和融合,从而得到更准确的全景图像。
除了技术点的研究,航空照相机全景图像拼接技术的发展还需要考虑到实际应用中的需求和使用场景。
例如,对于航空摄影来说,拼接后的全景图像对于地理测绘、城市规划、农业科学等领域的应用至关重要。
因此,算法的稳定性、拼接效果的准确性和高效性等方面都需要进行综合考虑。
此外,在航空照相机全景图像拼接技术的研究和应用过程中,还需要关注数据的存储和处理。
航空照片的体积通常很大,因此如何高效地存储、传输和处理这些数据,也是一个需要解决的问题。
全景视频技术及应用研究综述

全景(Panorama)一词源于希腊,其含义是“都能看见”。
广义上讲,全景是指视角超过人类正常视角范围的图像。
早在19世纪中期,全景相机就已经出现,但受到当时技术水平的限制,早期全景相机存在体积笨重、操作不便、记录媒介和光机系统不完善等诸多工艺和技术问题。
进入21世纪后,随着数字媒体、网络通信等相关技术的飞速发展,全景技术也取得了极大的进步,现已成为虚拟现实技术的重要研究方向和热门应用领域。
1. 全景技术特点及分类近几年,随着互联网巨头YouTube、Facebook 相继开通360度视频内容体验平台,使得以沉浸性、真实性、趣味性为显著特征的全景技术受到越来越多人们的关注和喜爱。
根据场景设计和实现方式不同,全景视频开发通常分为两种:一种称为虚拟现实视频(VR视频),是一种基于计算机图形学的纯虚拟CG制作形式,先用全景视频技术及应用研究综述文/天津商业大学 张伟摘要 :作为一种新兴媒体呈现技术,全景视频技术在许多领域都取得了引人注目的成就,是“虚”与“实”两种世界相结合的成功典范,本文对目前全景视频技术流程和相关核心环节进行了简要整理和概述。
关键词 :全景视频;虚拟现实;VR视频;全景技术Maya、Rhino3D、Blender等三维软件完成三维建模、再用Unity、Unreal等游戏引擎完成交互场景搭建和交互任务的设计等工作;另一种称为360度全景视频,取景范围通常为水平360度、垂直180度,由相机阵列或一体式全景相机对真实场景以图片或视频方式进行多角度环视采集,支持多角度播放和轻度互动体验,观看效果就像体验者站在空心球内部观看球体内表面上的实景画面。
目前,基于全景技术的360度视频形式主要有三种:360度2D视频(普通2D视频的水平360度、垂直180度环绕)、360度3D视频(特定视角范围内具有动态景深信息的三维立体视频)、360度3D体式视频(也叫体三维视频,是将光场摄像机采集到的光线色彩、光线强度以及不同角度射入的光线信息,通过特殊算法进行分析运算、逆向建模,进而还原出真实三维环境模型的技术)。
图像处理技术的研究现状和发展趋势
图像处理技术的研究现状和发展趋势图像处理技术的研究现状和发展趋势庄振帅数字图像处理又称为计算机图像处理,它是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
数字图像处理最早出现于20世纪50年代,当时的电子计算机已经发展到一定水平,人们开始利用计算机来处理图形和图像信息。
数字图像处理作为一门学科大约形成于20世纪60年代初期。
早期的图像处理的目的是改善图像的质量,它以人为对象,以改善人的视觉效果为目的。
图像处理中,输入的是质量低的图像,输出的是改善质量后的图像,常用的图像处理方法有图像增强、复原、编码、压缩等。
首次获得实际成功应用的是美国喷气推进实验室(JPL)。
他们对航天探测器徘徊者7号在1964年发回的几千张月球照片使用了图像处理技术,如几何校正、灰度变换、去除噪声等方法进行处理,并考虑了太阳位置和月球环境的影响,由计算机成功地绘制出月球表面地图,获得了巨大的成功。
随后又对探测飞船发回的近十万张照片进行更为复杂的图像处理,以致获得了月球的地形图、彩色图及全景镶嵌图,获得了非凡的成果,为人类登月创举奠定了坚实的基础,也推动了数字图像处理这门学科的诞生。
在以后的宇航空间技术,如对火星、土星等星球的探测研究中,数字图像处理都发挥了巨大的作用。
数字图像处理取得的另一个巨大成就是在医学上获得的成果。
1972年英国EMI公司工程师Housfield发明了用于头颅诊断的X射线计算机断层摄影装置,也就是我们通常所说的CT(Computer Tomograph)。
CT的基本方法是根据人的头部截面的投影,经计算机处理来重建截面图像,称为图像重建。
1975年EMI公司又成功研制出全身用的CT装置,获得了人体各个部位鲜明清晰的断层图像。
1979年,这项无损伤诊断技术获得了诺贝尔奖,说明它对人类作出了划时代的贡献。
与此同时,图像处理技术在许多应用领域受到广泛重视并取得了重大的开拓性成就,属于这些领域的有航空航天、生物医学过程、工业检测、机器人视觉、公安司法、军事制导、文化艺术等,使图像处理成为一门引人注目、前景远大的新型学科。
全景行业报告分析

全景行业报告分析全景技术是一种通过将多个图像或视频进行拼接,从而实现全方位、全景视角的显示技术。
随着虚拟现实(VR)和增强现实(AR)技术的发展,全景技术在各个领域得到了广泛的应用,包括旅游、房地产、教育、娱乐等。
本报告将对全景行业进行深入分析,包括市场规模、发展趋势、应用场景以及未来发展前景等方面。
首先,我们来看全景行业的市场规模。
根据市场研究机构的数据显示,全景行业在过去几年呈现出快速增长的态势。
随着VR和AR技术的普及,越来越多的企业和个人开始采用全景技术来展示产品、服务和场景。
据预测,未来几年全景行业的市场规模将进一步扩大,成为VR和AR技术中的重要组成部分。
其次,全景行业的发展趋势也备受关注。
随着全景摄像机和全景显示设备的不断升级,全景技术的成本逐渐降低,性能逐渐提升。
这将进一步推动全景技术在各个领域的应用,包括虚拟旅游、虚拟房地产、虚拟教育等。
同时,全景视频和全景图片的制作工具也在不断完善,使得更多的人可以轻松地制作和分享全景内容。
在应用场景方面,全景技术已经在多个领域得到了广泛的应用。
在旅游行业,全景技术可以为游客提供更加真实的旅游体验,帮助他们更好地了解目的地的风景和文化。
在房地产行业,全景技术可以为购房者提供虚拟看房体验,帮助他们更好地选择心仪的房屋。
在教育行业,全景技术可以为学生提供更加生动的学习体验,帮助他们更好地理解知识点。
在娱乐行业,全景技术可以为用户提供更加沉浸式的娱乐体验,带来更加丰富的娱乐内容。
最后,展望未来,全景行业有着广阔的发展前景。
随着5G技术的普及和应用,全景技术将得到进一步的推动,实现更高清、更流畅的全景内容传输和展示。
同时,随着人工智能和大数据技术的不断发展,全景内容的制作和推广将变得更加智能和个性化。
这将为全景行业带来更多的机遇和挑战,需要行业内的企业和从业者共同努力,不断创新和提升技术水平,以满足用户日益增长的需求。
综上所述,全景行业在市场规模、发展趋势、应用场景和未来发展前景等方面都表现出了强劲的势头。
图像拼接论文

基于特征点的图像拼接算法研究指导教师:学生姓名:学号:专业:计算机技术院(系):信息工程学院完成时间:2013年11月摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。
图像拼接的过程由图像获取,图像配准,图像合成三步骤组成。
其中图像配准是整个图像拼接的基础。
本文研究了基于特征图像配准算法。
利用基于特征Harris角点检测算法提取出初始特征点对,实现实现特征点对的精确匹配。
最后用加权平均对实现图像融合。
实验证明该算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。
同时该算法准确率高,鲁棒性强,具有较高的使用价值。
关键词::图像拼接图像配准特征点图像合成Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot.The image mosaic process consists of the following steps.Image acquisition, image registration, image fusion.fusion.Image registration is the important foundation of image mosaic.This article has studied a image registration algorithrm feature-based image registration algorithm.Firstly, corners are extracted using improved Harris operator to extract the initial feature point pairs. Then, the correct matching feature point pairs are used to realize the image registration.Finally,use the Weighted Average Fusion Rule to fuse the images.The experiment results indicate this algorithmhas better registration results under a variety of conditions such as different light ,bigger rotation and repetitive texture.At the same time, this algorithm has good effect in image registration, high accurate rate, strong robustness,higher use value.Key words:Image mosaic Image registration Feature points Image fusion目录第一章绪论 (1)1.1图像拼接的研究意义 (1)1.2国外研究现状 (1)第二章图像拼接基本理论 (3)2.1成像基础 (3)2.1图像变换模型 (3)2.2 图像拼接流程 (6)2.3图像配准算法 (6)2.4图像合成 (8)第三章基于特征的图像配准 (9)3.1 基于点的特征提取 (9)3.2 基于Harris角点检测算法 (9)3.3 特征点匹配 (10)3.3 图像融合 (11)第四章实验分析 (11)4.1 实验 (11)实验结论 (13)参考文献 (14)第一章绪论1.1图像拼接的研究意义随着计算机技术的发展,计算机在各个学科领域得到了应用。
大视场视频全景图拼接方法研究的开题报告
大视场视频全景图拼接方法研究的开题报告一、研究背景与意义在当前数字图像技术不断发展的时代,全景图拼接技术已经被广泛运用于虚拟现实、文化遗产数字化保护、网络全景游览等领域。
随着人们对全景图相关技术研究的深入,大视场全景视频的拼接问题也日益引起关注。
大视场全景视频是指利用多个摄像机拍摄场景,将其整合成一个超广角视频,将场景呈现给观众。
然而由于大视场全景视频涉及多摄像机的拼接,自然情景的复杂性使得其背景、形状、亮度、投影中心等视觉特征都难以统一,因此,大视场全景视频的拼接是一个非常复杂的技术问题。
本文旨在研究大视场全景视频拼接技术,解决该问题,实现大视场全景视频的精准拼接,对于提高大视场全景视频的质量、可靠性和应用范围将具有重要的研究意义和现实应用价值。
二、研究内容和技术路线本文主要研究大视场全景视频的拼接技术,通过以下步骤实现视频拼接:1.场景的拍摄和数据预处理。
利用多个摄像机拍摄目标场景,并对拍摄到的视频数据进行前期预处理,包括扭曲矫正、去噪等。
2.视频的特征提取。
对于拍摄的每一段视频数据提取其特征,包括背景、形状、亮度、投影中心等视觉特征。
3.视角估计。
根据视频的特征对视频进行配准和对齐,确定不同摄像机的视角,实现视频在不同角度下的拼接。
4.图像融合。
将配准后的图像进行融合,消除色差、亮度差异和镜头畸变等问题,实现图像的无缝拼接。
5.视频重构。
将融合后的图像重新组合形成大视场全景视频,实现视频拼接。
三、研究目标和预期结果本文旨在研究大视场全景视频拼接技术,解决该问题,实现大视场全景视频的精准拼接,对于提高大视场全景视频的质量、可靠性和应用范围将具有重要的研究意义和现实应用价值。
其预期结果有以下几方面:1.实现大视场全景视频的无缝拼接,消除拼接过程中的颜色、亮度、焦距等问题。
2.对比各种拼接算法,探索不同算法对大视场全景视频拼接的影响,确定最佳拼接算法。
3.设计一个高效的大视场全景视频拼接系统,提供高质量的全景视频输出,满足观众的需求。
全景照相机研究报告
全景照相机研究报告
全景照相机是一种能够捕捉全景图像的照相机。
它通过将多张照片拼接在一起,形成一个完整的、具有三维效果的360度全景图像。
这种照相机可以应用于多种领域,如房地产、旅游、建筑等行业。
全景照相机的工作原理是通过特殊的透镜将多个视角的图像拍
摄下来,然后通过软件将这些图像拼接在一起,形成全景图像。
全景照相机的透镜一般有两种类型:球形透镜和圆柱形透镜。
球形透镜可以拍摄360度全景图像,圆柱形透镜则主要用于拍摄水平方向的全景图像。
全景照相机的拍摄效果受到多种因素的影响,如拍摄环境、透镜质量、拼接软件等。
为了获得更好的拍摄效果,需要选择合适的拍摄环境和透镜,并采用高质量的拼接软件进行处理。
目前市场上的全景照相机种类繁多,主要分为专业级和消费级两种。
专业级全景照相机一般具有更高的分辨率和更多的功能,价格也较高。
消费级全景照相机则价格较为亲民,适合普通用户使用。
总的来说,全景照相机是一种十分实用的照相机,可以为多种领域提供高质量的全景图像。
随着技术的不断进步,相信全景照相机将会越来越普及。
- 1 -。
图像融合研究综述
11科技创新导报 Science and Technology Innovation Herald 技 术 创 新序言当今,在计算机、电子信息等科学技术迅速发展的同时,也带动了传感器技术的飞速发展。
多传感器使系统获得的信息量急剧增加并且呈现多样性和复杂性,以往的信息处理方法已无法满足这种新的情况,必须发展新的方法和技术来解决我们所面临的新问题[1]。
信息融合正是为了满足这种需求而发展起来的一种新技术。
多传感器信息融合是指对来自多个传感器的信息进行多级别、多方面、多层次的处理与综合,从而获得更丰富、更精确、更可靠的有用信息。
图像融合技术是多传感器信息融合的一个重要的分支,近二十年来,引起了世界范围内的广泛关注和研究[2]。
目前,图像融合技术在自动目标识别、遥感、机器人、医学图像处理以及军事应用等领域都表现出巨大的应用潜力。
例如,红外图像与可见光图像的融合可以帮助飞行员进行导航;CT 与核磁共振MR I图像的融合有利于医生对疾病进行准确的诊断等。
因此,对图像融合技术展开深入的研究,对于国民经济的发展和国防事业的建设均有重要的意义。
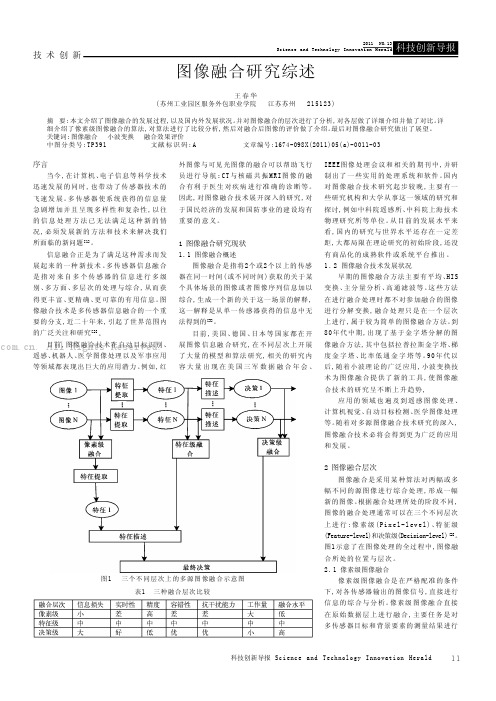
1 图像融合研究现状1.1图像融合概述图像融合是指将2个或2个以上的传感器在同一时间(或不同时间)获取的关于某个具体场景的图像或者图像序列信息加以综合,生成一个新的关于这一场景的解释,这一解释是从单一传感器获得的信息中无法得到的[3]。
目前,美国、德国、日本等国家都在开展图像信息融合研究,在不同层次上开展了大量的模型和算法研究,相关的研究内容大量出现在美国三军数据融合年会、IEEE图像处理会议和相关的期刊中,并研制出了一些实用的处理系统和软件。
国内对图像融合技术研究起步较晚,主要有一些研究机构和大学从事这一领域的研究和探讨,例如中科院遥感所、中科院上海技术物理研究所等单位。
从目前的发展水平来看,国内的研究与世界水平还存在一定差距,大都局限在理论研究的初始阶段,还没有商品化的成熟软件或系统平台推出。
360全景系统发展现状

360全景系统发展现状360全景系统是一种以全景摄影、全景图像处理和全景展示为核心技术的智能化产品。
它可以将一个场景的所有方向的图像捕捉并处理成一个连续的全景图像,在用户点选或手动滑动时可以实现全景图像的展示,使用户可以360度无死角地欣赏所拍摄场景。
360全景系统的发展可以追溯到20世纪90年代,当时全景图像的拼接与合成技术还处于初级阶段,且需要大量的计算资源和时间。
随着计算机算力的提升和图像处理算法的不断改进,全景图像处理技术得到了迅速发展。
2005年,全景图像的拼接与合成技术在计算机图形学领域取得了重要突破,使得全景图像的拍摄与制作变得更加简单和高效。
随着移动互联网的兴起,360全景系统进一步得到了普及和应用。
2007年,苹果公司发布了第一款iPhone,为用户提供了方便的拍摄和分享全景照片的功能。
接着,出现了一系列的全景相机和应用程序,如Nokia的PureView相机和Google的Photosphere应用程序,使得拍摄和浏览全景照片变得更加便捷和流行。
当前,360全景系统已经发展成为一个庞大的产业链。
从全景相机的制造、全景图像的处理到全景展示平台的开发,都涉及到多个硬件和软件供应商的合作。
以全景相机为例,目前市面上已经出现了许多不同品牌和型号的全景相机,如GoPro Fusion、Insta360 ONE R和Ricoh Theta等。
这些相机不仅具备高分辨率和广角拍摄的能力,还支持各种全景图像的处理和分享。
与此同时,全景展示平台也在不断地完善和发展。
谷歌公司推出了Google Street View,用户可以通过这个平台欣赏来自世界各地的全景图像。
此外,还有一些专门的全景展示软件和应用程序,如Kuula和Panoraven等,使用户可以将全景图像制作成虚拟现实(VR)和增强现实(AR)内容。
360全景系统的发展还面临一些挑战和问题。
首先,全景相机的体积和重量仍然比较大,不太适合携带和移动使用。
图像处理技术在全景拼接中的应用与发展趋势

图像处理技术在全景拼接中的应用与发展趋势全景拼接技术是一种将多幅图像拼接成一幅无缝、连续的大尺寸图像的技术。
随着数字摄影的普及和技术的不断进步,全景拼接技术得到越来越广泛的应用。
图像处理技术在全景拼接中发挥了重要的作用,既提高了拼接效果的精度和质量,又推动了全景拼接技术的发展。
本文将探讨图像处理技术在全景拼接中的应用及发展趋势。
首先,图像预处理是全景拼接的关键步骤之一。
图像预处理主要包括图像去噪、图像增强、图像校正等操作。
图像去噪可以通过降噪算法,如中值滤波和小波软阈值法减少图像中的噪声,提高图像质量;图像增强则可以通过调整亮度、对比度、饱和度等参数,使得图像更加鲜艳生动;图像校正可以通过几何校正和色彩校正等方法,消除图像中的畸变,使得各幅图像的色调和光照保持一致。
其次,特征提取和匹配是实现全景拼接的关键步骤。
特征提取是通过检测图像中的特征点或特征区域,如角点、边缘和关键点来描述图像的特征。
特征匹配则是在不同图像中找到相对应的特征点,以建立图像间的对应关系。
目前常用的特征提取算法包括SIFT(尺度不变特征转换)和SURF(加速鲁棒特征)等,特征匹配算法则包括RANSAC(随机一致性算法)和最小二乘法等。
这些算法在全景拼接中起到了至关重要的作用,可以提高拼接效果和减少误差。
接下来,图像融合是全景拼接的核心步骤之一。
图像融合是将多幅图片有机地融合在一起,形成无缝、自然的全景图。
目前常用的图像融合算法主要包括基于像素的融合算法和基于多变量分析的融合算法。
基于像素的融合算法将图像像素逐一作为融合单位,通过对像素进行加权平均求和来实现图像融合。
基于多变量分析的融合算法则通过对图像进行频域、时域和空域的分析,将多幅图像的特定区域或特征进行融合,以达到更好的效果。
此外,近年来还出现了深度学习在图像融合中的应用,通过训练神经网络模型,实现图像的自动融合,进一步提高全景拼接的质量和效率。
最后,全景拼接技术在不断发展中,也面临着许多挑战和发展趋势。
高空无人机系统中的图像拼接技术研究
高空无人机系统中的图像拼接技术研究随着无人机技术的飞速发展,高空无人机系统在航空、农业、地质勘探等领域发挥着重要作用。
在实际应用中,高空无人机系统需要获取全景图像以进行地理信息采集和监测分析。
然而,由于无人机在高空飞行时拍摄的图像具有视角变化、图像畸变和背景变化等问题,将多幅图像拼接成一张无缝全景图成为了一个具有挑战性的任务。
为了克服上述问题,图像拼接技术在高空无人机系统中得到了广泛的研究和应用。
本文将介绍高空无人机系统中的图像拼接技术及其研究现状。
首先,高空无人机系统中的图像拼接需要解决视角变化的问题。
由于无人机在飞行过程中可能发生姿态变化和俯仰角变化,拍摄的图像视角存在差异。
为了解决这个问题,研究人员提出了多幅图像的特征点匹配算法,并利用图像配准的方法将多幅图像从不同视角投影到同一坐标系下,最终获得全景图像。
例如,利用特征点提取和匹配算法,可以实现在高空飞行中拍摄的多幅图像之间的准确配准,从而消除视角变化对图像拼接的影响。
其次,图像畸变也是高空无人机系统图像拼接的一个重要问题。
由于无人机相机的镜头和姿态会导致图像出现不同程度的畸变,直接拼接图像可能会引入较大的误差。
为了解决这个问题,研究人员提出了图像去畸变的方法。
常用的去畸变方法有校正模型、标定系数和几何变换等,通过对图像进行去畸变处理,可以消除畸变引起的图像不连续现象,提高图像拼接的准确性。
另外,在高空无人机系统中,背景变化也会对图像拼接造成困扰。
由于高空无人机系统在不同时间和位置拍摄的多幅图像之间存在背景的变化,直接进行图像拼接可能会导致背景不连续。
为了解决这个问题,研究人员提出了背景一致性优化方法。
通过对图像进行光照补偿和颜色校正等处理,可以减少图像之间的背景差异,提高图像拼接的连续性。
此外,高空无人机系统中的图像拼接技术还面临一些挑战。
例如,高速飞行时,无人机拍摄的图像可能存在运动模糊和拍摄间隔不连续的问题,这会导致图像拼接的不准确性。
图像拼接技术研究综述

变换 , 在 对 齐 两 幅 图 像 的 位移 位 置后 , 两 幅 算 法 来 选 择 相 应 的 预 处 理 算 法 , 从 而 提 高 图像 的 对 齐 点可 以通 过 搜 索 最 大 值 的 位 置
得 到。
或体育赛 事 , 或 参 加 远 程 教 育 和 虚 拟 教 室
等。
图像 拼 按 精 度 和 速 度 。 此外, 拼 接 图像 变 换
模 型 的 选 定 还 可 以 根 据 原 始 图 像 的 特 性 来 , 这 样 就 可 以 选 择 合 适 的 图像 拼 接 预 处
1 . 2提 高 图像 的分辨 率
利 用 具 有 重 叠 区 域 的 多幅 图 像 或 者 视 图像 的 重 叠 区 域 包 含 实 际 场 景 的 很 多 冗 余
略 定位 。 以便在进 行精确配准时 , 减小误 ,
幅 或 者 多幅 图 像 在 空 间 位 置 上 的 对 准 。 如
1 . 3 增 大光 学 系统 的视场 角
差缩小搜索范围。 首先, 一 个 彩 色 图像 转 换 果 对 同 一 目标 的 两 个 图 像 是 相 同 的 , 即 可
常 复杂 的技 术 过 程 , 由 于 捕捉 到 不 同时 刻 ,
2 . 1 . 3灰 度 图投 影 算 法
如果 垂直方 向上 的平移可 以忽略 , 而 理 算 法 和 图像 行 粗 图 像 配 准 的 定 义 是 关 于 同 一 目标 的 两
频 图 像 序 列 可 以 生 成 超 分 辨 率 图像 , 因 为 且 水 平 方 向 上 平 移 较 小 的 时 候 , 可 以 使 用 2 . 2 图像 配准 信息。
全景图像处理中的图像拼接与去畸变技术

全景图像处理中的图像拼接与去畸变技术图像拼接和去畸变是全景图像处理中的两个重要技术,它们能够将多幅图像拼接成一幅无缝的全景图像,并且去除由于摄像机镜头畸变引起的图像形变。
这些技术在虚拟现实、机器视觉和摄影等领域中得到广泛应用。
图像拼接技术是将多个局部图像拼接成一个完整的全景图像。
在图像拼接过程中,主要涉及到特征提取、特征匹配和图像融合等步骤。
首先,特征提取是通过图像中的关键点来描述图像局部特征的过程。
常用的特征提取算法有SIFT (Scale-Invariant Feature Transform)、SURF (Speeded Up Robust Features)和ORB (Oriented FAST and Rotated BRIEF)等。
这些算法通过检测图像中的角点、边缘、纹理等关键点,并计算出其描述子来表示图像的局部特征。
其次,特征匹配是将不同图像中的特征点进行匹配的过程。
特征匹配可以通过计算特征点之间的相似度来找到对应的匹配点对。
常用的特征匹配算法有基于距离的匹配方法,如最近邻匹配和最佳匹配,以及基于几何关系的匹配方法,如RANSAC (Random Sample Consensus)算法。
这些算法能够在多幅图像中找到对应的特征点,并进行匹配,从而建立局部图像之间的对应关系。
最后,图像融合是将匹配的局部图像拼接成一幅无缝的全景图像的过程。
图像融合主要包括图像配准和图像合成两个步骤。
图像配准是将不同图像中的匹配特征点进行坐标变换,使得它们能够在同一坐标系下对齐。
图像合成是将配准后的图像进行融合,常用的图像融合方法有重叠区域的像素平均、像素加权平均和多重保留等方法,以实现无缝的全景图像拼接。
与图像拼接相对应的是图像去畸变技术。
当使用广角或鱼眼镜头拍摄图像时,由于光学畸变的存在,图像中的直线可能会产生弯曲的效果。
去畸变技术旨在通过数学模型和算法来消除光学畸变,以还原图像中的真实场景。
常见的图像去畸变方法包括基于几何模型的方法和基于校正图像的方法。
全景图像视频的场景分析与内容处理方法综述
全景图像视频的场景分析与内容处理方法综述全景图像视频的场景分析与内容处理方法综述摘要:随着全景图像和视频的快速发展,对于全景场景的分析和内容处理方法变得越来越重要。
本文将首先介绍全景图像和视频的定义和特点,然后综述当前流行的全景图像视频场景分析与内容处理方法,包括场景分割、特征提取、图像拼接和变换、对象识别和跟踪等。
最后,我们讨论了当前存在的挑战和未来的发展方向。
1.引言全景图像和视频是一种能够全方位展示场景的图像和视频。
与传统的平面图像和视频相比,全景图像和视频拥有更大的视野范围和更真实的沉浸式感受。
全景图像和视频广泛应用于虚拟现实、增强现实、无人驾驶、安防监控等领域。
然而,由于全景图像和视频包含大量信息,对其进行场景分析和内容处理变得非常困难。
2.全景图像和视频的定义和特点全景图像是指能够在一个视野范围内全方位展示场景的图像。
全景视频是指在时间序列上连续采集的全景图像集合,能够呈现动态场景。
全景图像和视频的特点包括视野范围广、沉浸感强、信息量大和复杂度高等。
3.全景图像视频场景分析与内容处理方法3.1 场景分割场景分割是将全景图像或视频中的像素分类为不同的场景区域。
传统的分割方法包括基于颜色、纹理和边缘等特征的方法,但在全景图像和视频中效果较差。
近年来,基于深度学习的场景分割方法得到了广泛应用,通过使用卷积神经网络进行像素级别的分类,取得了较好的效果。
3.2 特征提取特征提取是为了从全景图像和视频中获取有用的信息用于后续处理。
传统的特征提取方法包括颜色直方图、纹理特征和形状特征等。
近年来,基于深度学习的特征提取方法在全景图像和视频处理中取得了显著的进展,通过使用卷积神经网络提取图像和视频的高级语义特征,能够获得更准确和具有语义信息的特征。
3.3 图像拼接和变换图像拼接是将多个全景图像或视频帧拼接成一个完整的全景图像或视频。
传统的图像拼接方法包括基于特征匹配和投影变换的方法,但在全景图像和视频处理中容易出现拼接不准确或者拼接接缝明显的问题。