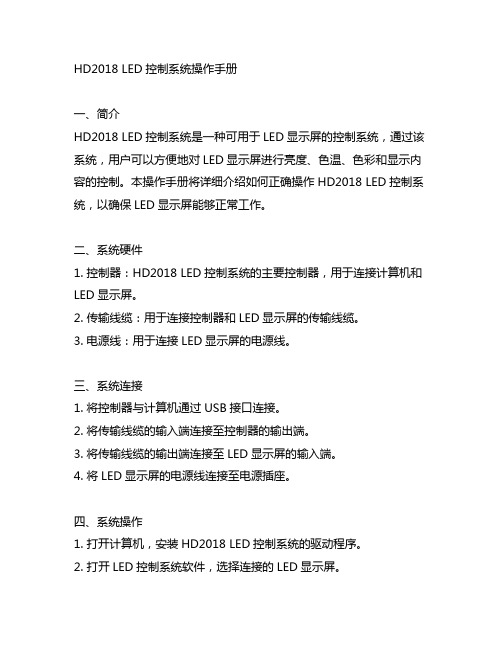
系统连接
hd2018led控制系统操作手册
HD2018 LED控制系统操作手册一、简介HD2018 LED控制系统是一种可用于LED显示屏的控制系统,通过该系统,用户可以方便地对LED显示屏进行亮度、色温、色彩和显示内容的控制。
本操作手册将详细介绍如何正确操作HD2018 LED控制系统,以确保LED显示屏能够正常工作。
二、系统硬件1. 控制器:HD2018 LED控制系统的主要控制器,用于连接计算机和LED显示屏。
2. 传输线缆:用于连接控制器和LED显示屏的传输线缆。
3. 电源线:用于连接LED显示屏的电源线。
三、系统连接1. 将控制器与计算机通过USB接口连接。
2. 将传输线缆的输入端连接至控制器的输出端。
3. 将传输线缆的输出端连接至LED显示屏的输入端。
4. 将LED显示屏的电源线连接至电源插座。
四、系统操作1. 打开计算机,安装HD2018 LED控制系统的驱动程序。
2. 打开LED控制系统软件,选择连接的LED显示屏。
3. 在软件界面上,选择要显示的内容,并进行亮度、色温和色彩的调节。
4. 点击“发送”按钮,将设置的内容发送至LED显示屏。
五、操作注意事项1. 在操作控制系统前,请确保传输线缆和电源线连接正确,以免影响正常显示。
2. 调节亮度、色温和色彩时,需谨慎调节,避免造成LED显示屏损坏。
3. 使用过程中如遇到异常情况或故障,请及时通联售后服务人员处理。
六、常见故障及排查方法1. LED显示屏无法正常显示可能原因:传输线缆连接不良排查方法:重新检查传输线缆连接是否松动2. LED显示屏亮度不均匀可能原因:灯珠损坏排查方法:检查LED显示屏是否存在灯珠损坏情况,如有,及时更换七、系统维护1. 定期清洁LED显示屏表面,避免灰尘积累影响显示效果。
2. 定期检查传输线缆和电源线是否出现损坏,如有,及时更换。
以上便是HD2018 LED控制系统的操作手册,希望通过本手册的详细介绍,能够让用户正确、方便地操作LED显示屏,确保LED显示效果的正常,延长使用寿命。
FAS系统与第三方系统的连接(共20张PPT)
半自动控制 半自动控制
(FAS→ISCS→)操作员工作站下达控制指令→BAS→防排烟设备 IBP盘下达控制指令→IBP盘控制器→BAS→防排烟设备
通信接口 通信接口
联动控制信息(指令)流向
手动控制
环控电控柜人工单台启停设备
无无FA锡锡S系地 地屏统铁铁蔽与F火A门第灾S三与自方第动系三报统方警连连系IS接接统C:S(数FA据S通)讯按半半类两自自接级动动口监控控控制制方式设置,(第F一AS级→IB为IPS盘中CS下央→达级)控,操制设作指置员令于工→无作I锡B站P地下控铁达制控控器制制→中指屏心令蔽;→门屏控蔽制门器控制器
FANUC数控系统硬件的连接

7.I/O Link[JD1A],本接口是连接到I/O Link的。注意按照从 JD1A到JD1B的顺序连接,即从系统的JD1A出来,到I/O Link的JD1B为止 ,下一个I/O设备也是如此,如若不然,则会出现通讯错误而检测不到 I/O设备。
3)模拟主轴控制信号接口 JA40 用于模拟主轴伺服单元或变频器模拟电压的给定。
NC与模拟主轴的连接:
注: 1)SVC和EC为主轴指令电压和公共端,ENB1和ENB2为主轴使能信 号 2)当主轴指令电压有效时,ENB1,ENB2接通。当使用FANUC主轴 伺服单元时,不使用这些信号。 3)额定模拟电压输出如下:
(2)每一个DOCOM都连在印刷版上,如果使用连接器的DO信号(Y ),请确定输入DC24V到每个连接器的DOCOM。
COB104输入单元连接图
COB106输入单元连接图
COB104输出单元连接图
对于I/O LINK的所有单元来说,JD1A和JD1B的引脚分配都是一致。 I/O LINK的电缆连接如下图所示
RS232接口还可以传输或监控梯形图、DNC加工运行。
RS232传输线
DB9常用信号脚接口说明
针 接受数据 发送数据
数据终端准备 信号地
缩 针号 写 DCD 6 RXD 7 TXD 8 DTR 9 GND
功能说明
数据设备准备好 请求发送 清楚发送 振铃提示
(1)I/O单元电源接口 (2)I/O单元手轮信号接口
(3)I/O单元输入/输出接口
(3)I/O单元输入/输出接口
名称的解释:
0i-表明的是FANUC 系统的类型(名称),由这个名称 可知系统的种类和档次。
伺服驱动系统的连接与调试
• • • • • • • 重点: 1、步进电动机及驱动电路及线路连接 2、交流电动机伺服系统 3、直流伺服电动机 4、进给驱动装置的连接与调试 难点: 进给驱动装置的连接与调试
情境3:伺服驱动系统的连接与调试 情境 :
进给伺服系统是数控系统主要的子系统。如果说CNC 装置是数控系统的“大脑”,是发布“命令”的“指 挥所”,那么进给伺服系统则是数控系统的“四肢”, 是一种“执行机构”。它忠实地执行由CNC装置发来 的运动命令,精确控制执行部件的运动方向,进给速 度与位移量。
t
NC机床对数控进给伺服系统的要求 机床对数控进给伺服系统的要求
⒌ 能可逆运行和频繁灵活启停。 ⒍ 系统的可靠性高,维护使用方便,成本低。 综上所述:对伺服系统的要求包括静态和动态特性两方 面,对于高精度的数控机床,对动态性能的要求要更严一些。
进给伺服驱动系统是指进给伺服系统中的 驱动电机及 进给伺服驱动系统
位置控制单元 CNC 插补 指令 + 位置控制调节 器 速度控制单元 +
-
速度控制 调节与驱动
机械执行部件
实际 位置 反馈
实际 速度 反馈 检测与反馈单 元
电机
NC机床对数控进给伺服系统的要求 机床对数控进给伺服系统的要求
1.调速范围要宽且要有良好的稳定 性(在调速范围内) 调速范围: 一般要求:
情境3 情境3:伺服驱动系统的连接与调试 概述
一进给伺服系统的定义及组成 进给伺服系统的定义及组成
1 . 定义: 进给伺服系统(Feed Servo System)——以移动 部件的位置 速度 位置和速度 位置 速度作为控制量的自动控制系统。
ห้องสมุดไป่ตู้
项目二 数控系统硬件连接

任务二:数控系统的硬件连接训练 6) 伺服电机动力电源连接
主要包含伺服主轴电机与伺服进给电机的动力电源连接,伺服主轴电 机的动力电源是采用接线端子的方式连接,伺服进给电机的动力电源是采
用接插件连接,在连接过程中,一定要注意相序的正确。
任务一:数控机床的组成(FANUC)
主 轴 电 动 机
普通型和变频专用电动机
串行数字主轴电动机
任务一:数控机床的组成(FANUC)
主 轴 传 动 机 构
带传动(经过一级降速)
经过一级齿轮的带传动
任务一:数控机床的组成(FANUC)
主 轴 传 动 机 构
内装式电机主轴单元 (电主轴) 几级降速齿轮传动
6.αi伺服模块(SVM2)
TB1: DC300V直 流母线 CXA2B:DC 24V工作电 源与控制信 号总线
CXA2A:DC 24V工作电 源与控制信 号总线
COP10B: 驱动器 FSSB总线
JF1:伺服电 机位置编码 器反馈 CZ2L/2M: 伺服电动机 电源输出
COP10A: 驱动器FSSB 总线 JF2:伺服电 机位置编码 器反馈
CM65: SA1信 号输入
CA65: 强电信号 输出(急停)
任务一:数控机床的组成(FANUC)
CE57/53: I/O LINK 总线接口
开/关 程序保护
XS1: SS01J信号 输入
急停 开关
SS01N: 进给轴倍率 波段开关
SS01J: 主轴倍率 波段开关
XS2: SS01N信号 输入
任务一:数控机床的组成(FANUC) 三.PMC单元与I/O LINK连接
数控系统的连接及调试

实训二数控系统的连接及调试一、实验目的1、熟悉HED—21S数控系统综合试验台各个组成部件的接口。
2、读懂电气原理图,通过电气原理图独立进行数控系统各部件之间的连接。
3、了解数控系统的调试运行方法。
二、实训设备HED—21S数控系统综合实验台万用表工具三、相关知识包括数控装置,由变频器和三相异步电机构成主轴驱动系统,由交流伺服单元和交流伺服电机构成的进给伺服驱动系统,由步进电机构成的进给伺服驱动系统等的数控系统,可实现主轴驱动系统的速度控制,进给伺服驱动系统的开环、半闭环、闭环控制。
1.电源部分图 4—1 电源部分接线图2.继电器与输入/输出开关量图4-2电器部分接线图图 4—3 继电板部分接口图 4—4 输入开关量接线图图 4—5 输出开关量接线图3.数控装置与手摇单元和光栅尺图 4—6 手摇单元接线图图 4—7 数控装置与光栅尺连接4.数控装置与主轴的连接图 4—8 数控装置与主轴连接5.数控装置与步进驱动单元连接图 4—9 数控装置与步进驱动单元的连接6.数控装置与交流伺服单元的连接图 4—10 数控系统与交流伺服单元的连接7.数控系统刀架的连接图 4—11 刀架电动部分四、实训内容及骤1.数控系统的连接(1)电源回路的连接按前图接线,并用万用表检查电源电压和变压器输出端电压。
(2)数控系统继电器的输入/输出开关量连接按前图连接继电器和接触器,以及输入/输出开关量。
(3)数控装置和手摇单元的连接按前图连接手摇单元和光栅尺。
(4)数控装置和变频主轴的连接连接变频器和主轴电机强电电缆,以及数控装置和变频器信号线。
确保地线可靠。
(5)数控装置和交流伺服器的连接按前图连接交流伺服电机的强电电缆和码盘信号线,接入伺服单元电源。
地线可靠正确接地。
(6)数控装置和步进电机驱动器的连接按前图连接步进电机驱动器和步进电机,以及驱动器电源。
(7)数控系统刀架电动机的连接连接刀架电机。
2、数控系统调试(1)线路检查。
FANUC 0I系统的连接与调试

C)伺服电机动力线和反馈线都带有屏蔽,一定要将屏蔽做接地处理,并且信号线和动力线要分开接地,以免由于干扰产生报警。如下所示:
D)对于PSM的MCC(CX3)一定不要接错,CX3的1,3之间只是一个内部触点,如果错接成200V,将会烧坏PSM控制板。如下图所示正确接法。
・按[SETING]软键。(若显示警告信息,请重新设定)。
・在轴设定画面上,指定关于轴的信息,如分离型检测器接口单元的连接器号。
・按[SETING]键(若显示警告信息,重复上述步骤)。此时,应关闭电源,然后开机,如果没有出现5138报警,则设定完成。
・首先把3111#0 SVS设定为1显现伺服设定和伺服调整画面。翻到伺服参数设定画面,如下图示,设定各项(如果是全闭环,先按半闭环设定)。
FANUC系统的连接与调试
第一节硬件连接
简要介绍了0IC/0I Mate C的系统与各外部设备(输入电源、放大器,I/O等)之间的总体连接,放大器(αi系列电源模块,主轴模块,伺服模块,βis系列放大器,βiSVPM)之间的连接以及和电源,电机等的连接,和RS232C设备的连接。最后介绍了存储卡的使用方法(数据备份,DNC加工等)。
G)对于I/O Link[JD1A]是连接到I/O模块或机床操作面板的,必须连接。
H)存储卡插槽(在系统的正面),用于连接存储卡,可对参数、程序、梯形图等数据ቤተ መጻሕፍቲ ባይዱ行输入/输出操作,也可以进行DNC加工。
1)伺服/主轴放大器的连接
以上是以0iC带主轴放大器为例的连接图。
注意:A)PSM、SPM、SVM(伺服模块)之间的短接片(TB1)是连接主回路的直流300V电压用的连接线,一定要拧紧,如果没有拧的足够紧,轻则产生报警,重则烧坏电源模块(PSM)和主轴模块(SPM)。
气体报警器与DCS系统常见连接方式
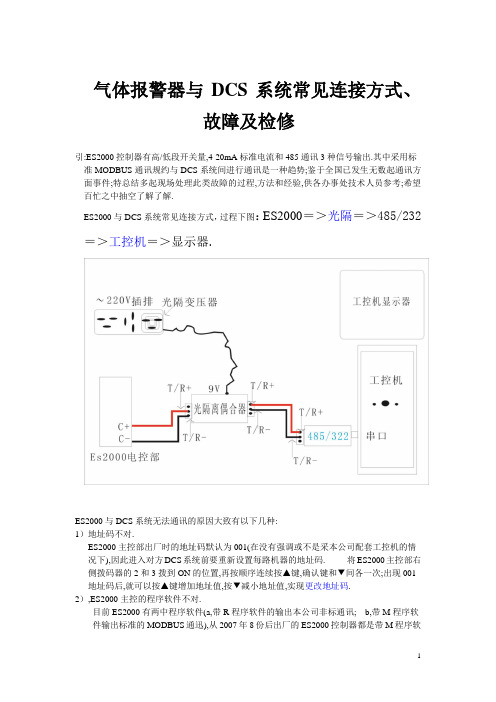
气体报警器与DCS系统常见连接方式、故障及检修引:ES2000控制器有高/低段开关量,4-20mA标准电流和485通讯3种信号输出.其中采用标准MODBUS通讯规约与DCS系统间进行通讯是一种趋势;鉴于全国已发生无数起通讯方面事件;特总结多起现场处理此类故障的过程,方法和经验,供各办事处技术人员参考;希望百忙之中抽空了解了解.ES2000与DCS系统常见连接方式,过程下图:ES2000=>光隔=>485/232=>工控机=>显示器.ES2000与DCS系统无法通讯的原因大致有以下几种:1)地址码不对.ES2000主控部出厂时的地址码默认为001(在没有强调或不是采本公司配套工控机的情况下),因此进入对方DCS系统前要重新设置每路机器的地址码._____将ES2000主控部右侧拨码器的2和3拨到ON的位置,再按顺序连续按▲键,确认键和▼间各一次;出现001 地址码后,就可以按▲键增加地址值,按▼减小地址值,实现更改地址码.2),ES2000主控的程序软件不对.目前ES2000有两中程序软件(a,带R程序软件的输出本公司非标通讯; b,带M程序软件输出标准的MODBUS通迅),从2007年8份后出厂的ES2000控制器都是带M程序软件输出为标准的MODBUS通迅信号;以上两种458通讯都有相对应的测试软件.A,若对方需要输出为标准的MODBUS通迅信号,用标准的MODBUS通迅测试软件无法通信上,但用非标通讯测试软件能通讯上;说明此批控制器程序不对,需要重新烧写程序或更换ES2000主控部.B,反之,对方已有本公司ES2000产品,后升级购用本公司DCS系统时,需要带R的程序软件输出本公司非标通讯信号,若不能非标测试软件测试;只能用标准的测试软件测试上,侧说明此批ES2000控制器程序不对,需要重新烧写程序或更换ES2000主控部.3),ES2000主控的通讯输出波特率与DCS系统输入波特率不一至.ES2000主控部的通讯波特率可以从1200到9600任意1200的整数倍设置_____将ES2000 主控部右侧拨码器的2,3和4都拨到ON的位置, 再按顺序连续按▲键,确认键和▼间各一次,此时ES2000显示屏的左上角有4800或9600等数字; 按▲键增大波特率值,按▼减小波特率值,若对方采用波特率为9600,调整ES2000的波特率也为9600即可.4),E2000与DCS系统之间的通讯回路不畅通.E2000与DCS系统的工控机之间一般要加光隔离偶合器(以下简称光隔)和485/322模快, 通讯回路不畅通故障一般先观察的电源指示灯是否正常指示,若正常指示就检查485/322模块是否插好在工控机的串口内。
发那科数控系统的硬件连接

任务实施一: 任务实施一: 完成数控系统、X轴放大器、(Y轴放大器)、 Z轴放大器的FSSB总线的连接。
任务实施二:完成 的连接。 任务实施二:完成I/O LINK 的连接。
任务实施三:完成伺服电机、 任务实施三:完成伺服电机、伺服放大器的连接
3) 主电源连接 主电源是用于伺服放大器动力电源。
4) 输出接伺服电机连接
5) 伺服电机反馈(编码器)的连接
6) 急停与MCC 连接 该部分主要用于对伺服主电源的控制与伺服放大 器的保护,如发生报警、急停等情况下能够切断 伺服放大器主电源。
(1)急停控制回路 急停控制回路一般有两个部分构 成,一个是PMC 急停控制信号 X8.4;另外一路是伺服放大器的 ESP 端子,这两个部分中任意一 个断开就出现报警,ESP 断开出 现SV401 报警,X8.4 断开出现 ESP 报警。但这两个部分全部是 通过一个元件来处理的,就是急 停继电器KA1。 (2) 伺服上电回路 伺服上电回路是给伺服放大器主 电源供电的回路,伺服放大器的 主电源一般采用三相220V 的交 流电源,通过交流接触器接入伺 服放大器,交流接触器的线圈受 到伺服放大器的CX29 的控制, 当CX29 闭合时,交流接触器的 线圈得电吸合,给放大器通入主 电源。
布置任务:现场认识FANUC Oi布置任务:现场认识FANUC Oi-C系统主板接 口。 步骤: 步骤: 学生使用六角扳手打开系统后板; 1)学生使用六角扳手打开系统后板; 观察系统接口,掌握每个接口的作用。 2)观察系统接口,掌握每个接口的作用。
主轴指令信号连接: 发那科的主轴控制采用两种类型,分别是 模拟主轴与串行主轴,模拟主轴的控制对 象是系统JA40 口输出0-10V的电压给变频 器,从而控制主轴电机的转速。 思考:主轴正反转如何控制的?
患者主索引(EMPI)是医疗信息系统的连接点

患者主索引在医院的作用随着医院信息化建设的发展,从原有HIS 系统的基础上,逐步发展出LIS 、RIS/PACS 、手术麻醉、病理、心电、重症监护(ICU/CCU )、ERP 等系统。
这些不同的系统可能来自不同的提供商,每个系统的架构、数据格式、编码标准可能不同,致使不同系统的患者信息和临床信息不能实现共享。
为了解决这样的问题,一些HIS 厂商托管了患者信息管理的职能,而且加强了对其他系统的开放接口。
尽管目前医院信息系统的架构能够基本满足医疗服务的需求,但也存在着很多问题。
一些医院的住院患者是以住院号为轴,贯穿整个住院流程并集成患者诊疗信息。
而门诊患者是以当次就诊的就诊号为轴,贯穿整个门诊流程并集成单次门诊的诊疗信息。
由于患者每次门诊的就诊号不同,致使患者的门诊就诊记录变为“死档”。
另外,由于同一患者的住院号和门诊号不同,致使患者的住院和门诊信息难以整合和共享。
近几年,医疗信息技术的飞速发展给医疗行业带来巨大的变革。
为了提高医疗质量和效率,减少差错,降低医疗事故和纠纷,新一代“以患者为中心,以电子病历为核心”的医疗服务系统逐渐被医疗行业所采纳和推崇。
在医院内部,通过患者主索引作为唯一的患者身份识别系统,将同一患者分散在不同临床系统中的诊疗信息整合在一起,形成一份完整的患者电子病历,对于强化临床管理,提高医疗质量和水平具有重要意义。
以患者主索引实现患者信息的综合管理,对于集团医院意义尤为明显。
由于集团医院大都采用垂直的管理体系,而实现垂直管理的关键是集团内医疗资源和信息的共享,因此患者主索引对集团医院实现共享起着不可或缺的作用。
患者主索引在区域医疗中的作用对于区域医疗而言,每个地区都拥有多家不同性质的医疗机构,如综合性医院、专科医院、社区卫生中心、疾控中心、公共卫生机构以及医疗保险机构等等。
除此之外,每个机构又都有自己单独的信息系统和患者管理系统。
要实现区域内不同机构、不同信息系统之间的信息交换和共享,必须首先解决相同患者在不同机构、不同系统中的身份识别和统一问题。
酷比魔方安卓4.0系统平板连接电脑方法
特别注意:
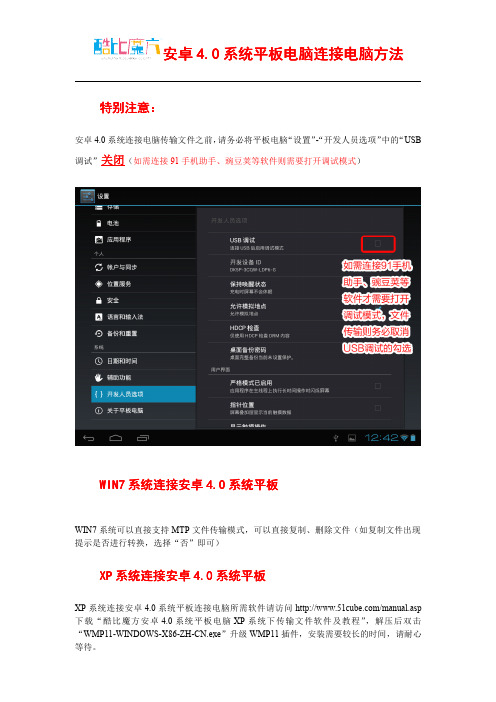
安卓4.0系统连接电脑传输文件之前,请务必将平板电脑“设置”-“开发人员选项”中的“USB 调试”关闭(如需连接91手机助手、豌豆荚等软件则需要打开调试模式)
WIN7系统连接安卓4.0系统平板
WIN7系统可以直接支持MTP文件传输模式,可以直接复制、删除文件(如复制文件出现提示是否进行转换,选择“否”即可)
连接安卓4.0系统平板
系统连接安卓
XP系统
XP系统连接安卓4.0系统平板连接电脑所需软件请访问/manual.asp 下载“酷比魔方安卓4.0系统平板电脑XP系统下传输文件软件及教程”,解压后双击“WMP11-WINDOWS-X86-ZH-CN.exe”升级WMP11插件,安装需要较长的时间,请耐心等待。
软件安装完毕后,必须重启电脑。
重启电脑后用USB数据线连接酷比魔方安卓4.0系统平板电脑,会出现如下画面:
点击屏幕右下角,会出现扩展栏,点击“作为媒体设备连接”选项
勾选“媒体设备(MTP)”选项
此时,打开我的电脑,会出现下图所示的MTP设备。
打开后,会出现下图所示的本机自带内存和TF卡(在插入TF卡的状态下),如下图所示。
至此,就可以在WINDOWS XP系统下自由复制文件了。
祝大家用机愉快~
酷比魔方官网:。
项目二 数控系统硬件综合连接

●机床运动部件 限位开关、电磁 阀 ●液压、气压、 润滑装置 ●继电器电路 ●机床其它强电 电路
1.数控系统主板结构与接口(11)
(4)模拟主轴接口JA40
■如果采用非FANUC公司主轴电机,则可以采用变频器驱动。 ■变频器和CNC之间通过JA40接口连接,这时CNC通过JA40 接口给变频器提供-10V~+10V模拟指令信号。 ■CNC、变频器、主轴电机连接图如图所示。
SPM JYA2
JA41
JA7B
1.数控系统主板结构与接口(6)
关于串行主轴接口,有以下几点需要说明:
1)该接口所连接的放大器一定是串行主轴放大器;
2)当系统使用模拟主轴时应使CNC模拟主轴接口
与放大器连接,JA41接口此时连接模拟主轴位置编码器;
1.数控系统主板结构与接口(7)
关于串行主轴接口,有以下几点需要说明:
3.数控系统主轴放大器SPM(Spindle Amplifier Module)接口 (10)
3.数控系统主轴放大器SPM(Spindle Amplifier Module)接口 (11)
15—JY3。磁感应开关信号接口。 数控铣床、加工中心主轴具有定向或准停功能, 这样才能实现镗孔加工循环指令(G76、G86)
⑤—CX2A。直流24V输出接口。
该接口与电源模块CX2B接口连接。
⑥—CX2B。直流24V输入接口。 该接口与紧邻伺服放大器的CX2A相连接。
3.数控系统主轴放大器SPM(Spindle Amplifier Module)接口 (7)
⑦—直流回路连接点状态指示。 在该指示灯完全熄灭后,方可对模块电缆进行 各种操作,否则有危险。 ⑧—JX4。主轴放大器工作状态检查接口。 ⑨—JX1A。模块连接接口。
Win7系统网络连接正常却不能上网
Win7系统网络连接正常却不能上网人们使用电脑时候最不想看到的事情之一就是上不了网了,无论是工作还是玩游戏时候都很不爽。
很多用户都试过网络连接正常,但是还是无法上网情况,其实导致这样的问题出现,是因为系统中的winsock出现了问题,我们只需要重置winsock就可以解决这样的问题了。
这里就让小编来为大家介绍下具体的解决方法吧!Win7系统网络连接正常却不能上网的解决方法如下所示:1.点击开始-运行或按Win+R,在运行中输入“cmd” ,回车。
2.在cmd中输入“netsh winsock reset” 回车。
3.重启电脑就好了。
补充:电脑突然无法上网如何解决右击网络图标,打开网络共享中心,查看我们的网络连接目前的情况。
在网络共享中心中第一条就是我们目前网络连接的示意图,查看在那个位置有问题。
一般会在连接有问题的地方出现黄色的叹号或者红色的叉号。
单击黄色的叹号或者红色的叉号系统就会自动的检测问题,等待一会结果就会出来了,能否解决问题系统也会给出提示。
系统提示无法修复,但是其实问题已经解决了,再次进行连接即可。
如果自动修复以后还是不行,那就是我们的网络连接设置需要手动的进行一些设置。
打开网络共享中心,在左侧有一个管理适配器的选项,单击进入。
在里面可以看到电脑中所有的网络连接使用的适配器开启状态。
右击,选择诊断操作看是否能够正常修复。
注意选择诊断的适配器是我们需要使用的,如网线就是本地连接,无线就是无线网络。
诊断之后我们需要对其进行禁用然后重启的操作。
我们还可以使用软件进行修复,电脑管家里面就有很好的修复功能,这里就以它为例。
打开软件,里面有各种关于网络的修复方法,可以使用这个快速修复你的网络问题。
linux 系统优化tcp连接

提高服务器的负载能力,是一个永恒的话题。
在一台服务器CPU和内存资源额定有限的情况下,最大的压榨服务器的性能,是最终的目的。
要提高Linux系统下的负载能力,可以先启用Apache的Worker模式(参考我写的《Ubuntu下配置Apache的Worker模式》一文),来提高单位时间内的并发量。
但是即使这么做了,当网站发展起来之后,连接数过多的问题就会日益明显。
在节省成本的情况下,可以考虑修改Linux的内核TCP/IP参数,来最大的压榨服务器的性能。
当然,如果通过修改内核参数也无法解决的负载问题,也只能考虑升级服务器了,这是硬件所限,没有办法的事。
Linux系统下,TCP/IP连接断开后,会以TIME_WAIT状态保留一定的时间,然后才会释放端口。
当并发请求过多的时候,就会产生大量的TIME_WAIT状态的连接,无法及时断开的话,会占用大量的端口资源和服务器资源(因为关闭后进程才会退出)。
这个时候我们可以考虑优化TCP/IP的内核参数,来及时将TIME_WAIT状态的端口清理掉。
本文介绍的方法只对拥有大量TIME_WAIT状态的连接导致系统资源消耗有效,不是这个原因的情况下,效果可能不明显。
那么,到哪儿去查TIME_WAIT状态的连接呢?那就是使用netstat命令。
我们可以输入一个复核命令,去查看当前TCP/IP连接的状态和对应的个数:#netstat -n | awk ‘/^tcp/ {++S[$NF]} END {for(a in S) print a, S[a]}’这个命令会显示出类似下面的结果:LAST_ACK 14SYN_RECV 348ESTABLISHED 70FIN_WAIT1 229FIN_WAIT2 30CLOSING 33TIME_WAIT 18122我们只用关心TIME_WAIT的个数,在这里可以看到,有18000多个TIME_WAIT,这样就占用了18000多个端口。
Windows系统的常见网络连接问题及解决方法
Windows系统的常见网络连接问题及解决方法Windows操作系统是目前最为常见的桌面操作系统之一,但在使用过程中,有时会遇到各种网络连接问题。
本文将介绍几种常见的Windows系统网络连接问题,并提供一些解决方法。
一、无法连接到互联网当无法连接到互联网时,首先需检查常见的网络故障可能性,如断网、路由器故障等。
若确认这些因素无误,以下解决方法可以尝试:1. 重启网络适配器:在任务栏右下角的网络图标处右键点击“网络和Internet设置”,再点击“更改适配器选项”,找到当前使用的网络适配器,右键点击选择“禁用”,然后再次右键点击选择“启用”。
2. 更新网卡驱动程序:进入设备管理器(可通过按下Win + X键,选择“设备管理器”来打开),展开“网络适配器”选项,找到当前使用的网卡设备,右键点击选择“更新驱动程序”,按步骤操作完成驱动程序的更新。
3. 检查IP地址和DNS设置:在控制面板中,选择“网络和Internet”并点击“网络和共享中心”选项,点击“更改适配器设置”,找到当前使用的网络适配器,右键点击选择“属性”,双击“Internet协议版本4(TCP/IPv4)”选项,确保该选项中的IP地址和DNS服务器地址设置为自动获取。
二、无法访问特定网页或资源当Windows系统可以连接到互联网,但无法访问特定网页或资源时,可以考虑以下解决方法:1. 清除浏览器缓存和Cookie:打开浏览器,进入“设置”或“选项”,找到清除浏览数据或清除历史记录的选项,选择清除缓存和Cookie,并重启浏览器试试访问目标网页。
2. 检查防火墙设置:进入控制面板,选择“系统和安全”并点击“Windows Defender防火墙”选项,点击“高级设置”,检查是否有阻止特定网页或资源的规则,若有,可尝试删除对应规则或添加例外。
3. 重置网络设置:在命令提示符中执行以下命令来重置网络设置:netsh winsock reset,然后按“Enter”键重启电脑。
FANUC数控系统的硬件连接

CX2B:为DC24V电源、*ESP急停信号、XMIF报警信息输出接 口,与后一个模块的CX2A相连。
C0P10A:伺服高速串行总线(HSSB)输出接口。与下一个伺服 单元的C0P10B连接(光缆)。 C0P10B:伺服高速串行总线(HSSB)输入接口。与CNC系统 的C0P10A连接(光缆)。 JX5:为伺服检测板信号接口。 JF1、JF2:为伺服电动机编码器信号接口。 CZ2L、CZ2M:为伺服电动机动力线连接插口。
布置任务:现场认识主轴变频器的接口。
(2)串行主轴(数字主轴) FANUC的α 系列主轴模块主要分为SPM、SPMC、SPM-HV三种。 1)α 系列FANUC 0i主轴驱动装置的型号参数 主轴驱动装置的型号参数如下所示。 SPM口-口口 ① ② ③④ ①主轴驱动装置型号; ②电动机类型,“无”为α 系列,C为α C系列; ③额定输出功率; ④输入电压,“无”为200 V,HV为400 V。 2)SPM-15主轴驱动装置接口信号的定义 SPM-15主轴驱动装置接口信号的定义如图所示。
JV1B、JV2B:A型接口的伺服控
制信号输入接口。
JS1B、JS2B:B型接口的伺服控
制信号输入接口。
JF1、JF2:B型接口的伺服位置反
接口(6V)。
CX3: 伺服装置内MCC动作确认接口,一般可用于伺服单元
主电路接触器的控制。
CX4:伺服紧急停止信号输入端,用于机床面板的急停
二、FANUC 进给伺服放大器接口
进给伺服系统主要由进给伺服驱动装置及其伺服电动机组 成。 伺服驱动装置接受从主控制单元发出的进给速度和位移指令 信号,作一定的转换和放大后,驱动伺服电动机,从而通过机 械传动机构,驱动机床的执行部件实现精确的工作进给和快速 移动。
系统连接
系统连接是指控制系统各个单元之间的间接。
既包括通过电线、电缆各个实体单元之间的 连接,也包括控制系统中虚拟单元(如DCS 中控制器、转换单元、运算单元等)的连接。
第一节
控制系统的整体连接
控制系统中各个单元大体上可分为:
安装在现场的单元
测量变送单元 和执行单元;
安装在中央控制室内的单元
第二节 电缆的连接与敷设
电缆的铺设
电缆敷设常常采用埋 设和架空两种敷设方法。 当多芯长电缆需要穿越 建筑物和道路时,或者 现场不具备架空敷设时 常常用埋设方法进行敷 设,这种敷设比较坚固 安全,但是不便于电缆 的检修、更换操作。
电缆
0.00
电缆
第二节 电缆的连接与敷设
电缆敷设图
第二节 电缆的连接与敷设
电缆的连接 控制室仪表与现场仪表之间通常采用电缆连接。这 是因为现场仪表所处的工作环境比较恶劣,引向这 些仪表的导线就需要有一定的保护措施,防护措施 主要从两个方面考虑,即连接导线的电气防护措施 与机械损伤防护措施,一般导线都不能满足这些要 求。另一方面,控制室和现场之间的距离一般都比 较长,每个信号都使用单芯的电线进行连接,则势 必增加电线的敷设工作量,造成工程费用开支加大。
采用DCS的回路图
采用DCS的回路图
第一节
控制系统的整体连接
图中将现场部分分为工艺区和接线箱区两部分, 由于采用DCS,控制室内没有仪表盘,根据DCS的组 成,将控制室内分为端子柜、控制站和操作员站三部 分。 各区内的仪表按《过程测量和控制仪表的功能标 志及图形符号 (HG/T 20505-2000) 》规定绘制出相应 的符号与位号,同时在该仪表附近标示出其型号。为 了表达出仪表之间的相互连接,应绘制出该仪表相应 的接线端子,不用的端子可不绘出。
系统远程连接设置电脑分辨率的步骤
系统远程连接设置电脑分辨率的步骤
大家都知道显示分辨率一定的情况下,显示屏越小图像越清晰,反之,显示屏大小固定时,显示分辨率越高图像越清晰。
当win10预览版系统用户远程管理其他电脑时我们该如何自定义分辨率呢?由于自己的屏幕分辨率和远程电脑分辨率不同,为了避免远程机器桌面分辨率过大而造成操作上的不便,下面店铺就教你如何设置自定义分辨率来更好管理其他电脑,需要的朋友可以参考下!
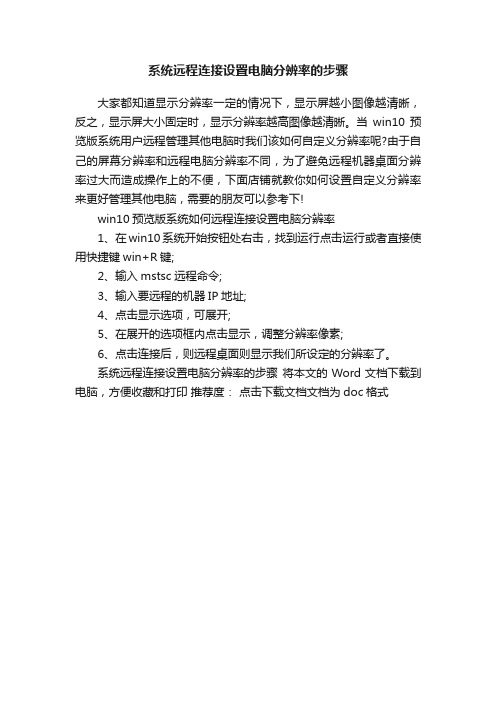
win10预览版系统如何远程连接设置电脑分辨率
1、在win10系统开始按钮处右击,找到运行点击运行或者直接使用快捷键win+R键;
2、输入mstsc远程命令;
3、输入要远程的机器IP地址;
4、点击显示选项,可展开;
5、在展开的选项框内点击显示,调整分辨率像素;
6、点击连接后,则远程桌面则显示我们所设定的分辨率了。
系统远程连接设置电脑分辨率的步骤将本文的Word文档下载到电脑,方便收藏和打印推荐度:点击下载文档文档为doc格式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Page 2/10
安装准备——检查各硬件是否齐全
MCPA(选件): 一个(可用于模拟主轴) 订货号: 6FC5312-0DA01-0AA0 模拟驱动器接口ADI4(选件): 一个 订货号:6FCS211-0BA01-0AA2 SITOP电源模块: 订货号:6EP1434-2BA00 Profibus DP 总线电缆: 订货号:6XV1 830-0EH10
转换器
© Siemens AG 2009. All Rights Reserved. Industry Sector
X333
X333 输出:Q2.0~Q3.7 端子
PP 72/48
X111
X4 X5 X20 X1
X1
X3 ADI4
X1201 X1202
X1201
X1201
X2
DP/DP 耦合器 X2
X224
CUA31
X202
驱动部分连接——模块式标准连接
系统部分
X200
X201
X202
X500
L1 L2 L3
X200
X210
X201
X210
主电源开关
RDY OUT>5V
RDY OUT>5V
X224
SMC0
CUA31
PM340 进线滤波器 进线电抗器
1Vpp – SMC20 TTL – SMC30
1 2 3 4
1 2 3 4
熔断器 主电源开关
进线电抗器 外接24V
Ready Warning I2t EP +24V EP M X200 X201 X202 X200 X201 EP M EP +24V
Active Line Module & Smart Line Module(16/36kw) Smart Line Module(5/10KW)
系统连接
1. 硬件连接准备 2. 系统硬件连接 3. 驱动eserved.
安装准备——检查各硬件是否齐全
PCU210.3: 一台 订货号: 6FC5370-0AA00-1AA0:value ( S1 ) 订货号: 6FC5370-0AA00-2AA0:plus ( S2 ) 订货号: 6FC5370-0AA00-3AA0:pro ( S3 ) 键盘: 一个 订货号:6FC5303-0DT12-1AA0(垂直安装) 订货号:6FC5303-0DM13-1AA0(水平安装) 输入输出模块PP72/48 :一块(总共可选配三块) 订货号: 6FC5611-0CA01-0AA0 配套件:1. 50芯扁平电缆(非西门子提供) 2. 50芯扁平电缆端子转换器(非西门子提供) 机床控制面板MCP(选件) 订货号:6FC5603-0AD00-0AA3(接PP72/48) 订货号:6FC5303-0AF30-1AA0(接MCPA)
RDY DC-Link
RDY DC-Link
24V + Disable Reset M RDY DC-Link
系统部分
Thank you for your attention!
© Siemens AG 2009. All Rights Reserved.
X111
X111
转换器 输出:Q0.0~Q1.7 X222 X222 端子 输入:I3.0~I5.7 转换器 X333
PP 72/48
PP 72/48
X222
X222
编码器信号
X333
驱动部分
Page 7/10
24V电源 输入:I6.0~I8.7 ADI4:地址16 ADI4:地址15 模块1:地址9 模块2:地址8输出:Q4.0~Q5.7 模块3:地址7
○书本型驱动
电源模块 : 订货号: 6SL3131-6AE-0AA0 (非调节型) 订货号: 6SL3131-7TE-6AA1 (调节型) 配套件:
电机模块 订货号:6SL3121-1TE-AA(单轴模块) 订货号: 6SL3121-2TE-AA(双轴模块) 配套件:
Page 4/10 © Siemens AG 2009. All Rights Reserved. Industry Sector
安装准备——检查各硬件是否齐全
传感器模块(若电机不带Drive-CliQ接口或外接编码器): 订货号: 6SL3055-0AA00-5BA1(SMC20) 订货号: 6SL3055-0AA00-5CA0(SMC30) 电抗器: 订货号: 6SN1111-0AA00-0V 电源滤波器 (需与电抗器配合使用): 订货号: 6SL3000-0E- A0 Drive-CliQ 电缆 订货号:6SL3060-4AU00-AA
Page 5/10
© Siemens AG 2009. All Rights Reserved. Industry Sector
安装准备——检查各硬件是否齐全
伺服电机1FK7: 订货号: 1FK7-5AF71-1K5 主轴电机1PH7: 订货号: 1PH7-2QF02-00 动力电缆: 订货号: 6FX002-5-….
X9
MCPA 接口
MCPA
X1
X2
可选用垂直键盘 电子手轮必须选 PP72/48通过Profibus X111、X222、X333 DP/DP耦合器主要用于 ADI4可以提供4组模拟 使用Drive-CliQ线与驱 MCPA直接安装在系统 推荐使用西门子 ADI4的地址可以设为 操作面板必须接 第二、三块PP72/48模 第一块PP72/48模块 需先确保安装MCPA, 通过端子转接器与 自定义操作面板只能接 别忘了接电源,可 或者水平键盘 用差分信号 与系统相连 对应PLC地址为 量输出,需要外接电源 两个Profibus网络连接 动部分相连 背板上 PP72/48的X111与 标准电源模块 15或者16,具体配置 块地址分别设为8和7 PROFIBUS地址设为9 机床电器部件相连 并且MCP接口为37芯D PP72/48,并需要修改 从SITOP模块引线 SITOP X222 过程请参看调试手册 型口 PLC程序
进线滤波器 进线电抗器
PM340
熔断器
Page 9/10
© Siemens AG 2009. All Rights Reserved. Industry Sector
X224
CUA31
X202
)
L1 L2 L3
驱动部分连接——书本型驱动标准连接
安装电源模块
Single Motor Module
X202
X200 X201 1 2 3 4 EP M EP +24V
X202 1 2 3 4 EP M EP +24V
Double Motor Module
X203
SMC0
© Siemens AG 2009. All Rights Reserved. Industry Sector
X500
1 2 3 4
Page 10/10 进线滤波器 前置触点
X201
X210
主电源开关
RDY OUT>5V
RDY OUT>5V
X224
SMC0
CUA31
PM340 进线滤波器 进线电抗器
1Vpp – SMC20 TTL – SMC30
进线滤波器 进线电抗器
PM340
熔断器
Page 8/10
© Siemens AG 2009. All Rights Reserved. Industry Sector
X6
X1202
X1202
模拟驱动器
X111
X1 X2 X1 X2 X1 X2 输入:I0.0~I2.7
端子
其他总线 设备
机 床 电 器 部 件
X5-2 X5-1 X4-2 X4-1
I/O
X2 X1
驱动部分连接——模块式标准连接
系统部分
X200
X201
X202
X500
L1 L2 L3
X200
X210
…
Page 3/10
© Siemens AG 2009. All Rights Reserved. Industry Sector
安装准备——检查各硬件是否齐全
●模块型驱动(只适用于Vaule)
控制单元适配器CUA31: 订货号: 6SL3040-0PA00-0AA0 功率模块PM340: 订货号: 6SL3210-1SE-UA0
系统部分——标准配置连接
SITOP 24V电源
802D sl PCU X30
至PP72/48模块
连接驱动器 其他可选部件连接 安装MCPA 安装MCP操作面板 安装I/O模块 连接电子手轮 连接键盘 安装电源 连接DP/DP耦合器 MCP(接PP72/48) PP72/48
连接ADI4 自定义MCP MCP(接MCPA)
U V W
信号电缆 订货号:6FX002-2….(带Driver-CliQ口) 订货号: 6FX002-2CA31-10 (不带Drive-CliQ口)
Page 6/10
© Siemens AG 2009. All Rights Reserved. Industry Sector