全自动卫星天线定位伺服控制系统概要
全自动卫星天线定位伺服控制系统概要

全自动卫星天线定位伺服控制系统本控制系统是专门为4.5M卫星天线设计制作,通过本控制系统可方便地进行天线的方位、俯仰和极化的角度调整。
由于采用了新型交流伺服控制器,使天线的各角度的控制精度得以大幅提高,在目前国内同类系统中应用技术较为先进。
(一)卫星天线控制系统的方案采用我公司生产的交流伺服控制器和交流异步电机组成的伺服驱动单元,以可编程控制器、可编程终端等组成控制单元。
系统构成方案如图所示。
(二)系统功能及技术指标该系统由室内控制单元和室外伺服驱动单元组成,通过可编程终端显示的文字提示进行操作。
交流伺服控制器驱动天线机构上的交流异步电机实现精确的位置、速度控制,以实现天线的方位、俯仰和极化的角度调整。
安装在电机上的编码器不仅为交流伺服控制提供反馈信息,而且为室内控制单元提供天线的方位、俯仰信息,经数据处理后用于控制和显示角度。
软件在实现系统的各种功能中起着非常重要的作用。
本系统的软件有交流伺服控制器(3台)的程序、可编程控制器的程序和可编程终端的程序。
这几种程序分别担负着人机界面、数据处理、动作控制以及状态监视等各种作用。
与天线方位有关的软件部分对应于天线和本系统安装在北半球。
动作范围:方位90.00°(东)~270.00°(西)[正南为180°]俯仰 5.00°(俯)~90.00°(仰)极化±90°动作方式:⑴角度操作:设定角度值,运动至设定位置。
(对好第一颗星之后)⑵步进操作:选择步进距(小步距0.01°、中步距0.05°、大步距0.25°)后,单键操作,按1次键,运动1步。
⑶启停操作:选择电机转速(方位、俯仰和极化的速度分挡不同)后,单键操作,按1次运动、再按1次停止。
换星操作:按序号登录5颗星的方位角、俯仰角数据。
设定目标星号后执行换星。
非常快捷、方便。
若所设定的星号未登录则不执行并提示“无效”。
基于电压空间矢量控制的卫星天线伺服系统

比较 ,如有误差则进行位置调节算法计算 ,其计算结果作为速度给定输入 ,并进行速度调节算法计 算 ,其 计算 结果 再作 为 电流给 定输 入 ,与 电流反馈 信 号 比较 后进 行 电 流调节 ,电流 调节 信号 作为 产
生电压 向量 幅值 的依据 ,通过查 表 法查 出 P WM 的波形 分配 ,并 产生 P WM 控 制 波形 。该 P WM 波
一
速 度 调
电 — + 电
I 节一 ▲ l 节
L 电 检 + — 流 测I —
. 码I 解 ・
l
动 机
J r
旋 编 转
码 器
速 计 度算
千
图 l 伺 服 驱 动 控 制 器 框 图
系统控 制 是根据 转 速要求 ,计 算 出 当前 电机 应 处的转 子位 置并 给 定信号 ,与位 置反 馈信 号进 行
略 ,组成 电流 、速 度 和位置 的三 环 调速 控制 系统 l 。无 槽 正 弦 波 电机 的采 用 保证 了力 矩 的平稳 性 , 2 ] 进 一 步提 高 了稳 态 和瞬 态精 度 。系 统 中 电流 环 、速 度 环 、位 置 环 的 采 样 频 率 分 别 为 0 2 、l 、 . ms ms
在 卫 星天线 的伺服 控制 系统 中 ,伺 服 电机驱 动 天线 进 行 周 期 扫 描 ,为 成 像设 备 提供 成 像 数据 。
它 要求 有扫 描 周期 起始 的位 置信 号 ,同时要求 扫 描 周期非 常 精确 ,且 要 求扫 描天 线在 理 论上 应该 严 格 地 匀速旋 转 。伺 服驱 动控 制 系统 原理框 图如 图 1 示 。由于转 速精 度 要求 万分 之二 ,其他 方式 控 所 制 难 以保证 精度 ,故采 用 同步运 行方 式控 制 。系统 中 A/ D为 1 bt WM 为 1 bt 0 i,P 6 i,速度 传 感器 为 1 位 绝 对位 置式 光 电编码 器 ,而 且 由于驱 动 电机 采 用 的是 同步 电机 ,其 稳 态 转速 完 全 由施 加 在 电 6
卫星天线伺服控制系统研究

| 工程技术与应用| Engineering Technology and Application·24·2016年10月卫星天线伺服控制系统研究景丹玉,韩 刚(91917部队,北京 102400)摘 要:在进行卫星通信过程中,天线的快速、准确、精密、稳定将会直接决定其通信质量的高低,因此需要采取措施构建一个安全、可靠、稳定的通信链路,以确保其通信过程的顺利进行。
文章对卫星天线伺服控制系统给予介绍和探讨。
关键词:卫星天线;伺服控制系统;工作原理;数学模型中图分类号:TN828.5 文献标志码:A 文章编号:2096-2789(2016)10-0024-011 卫星天线伺服控制系统简介1.1 卫星天线伺服系统的工作原理在进行卫星天线伺服系统设计过程中,要按照星载计算机预先设定的天线转向命令,来使两个方向天线转向设定的位置,从而进行数据传输任务。
其卫星天线系统常用频段主要有C、Ku、Ka等。
而卫星电视广播常选择C 频段。
Ka频段主要是向客户提供千兆比特级的数字传输、高速的卫星通信、高清数字电视以及一些个人通信业务。
以Ku频段的机载卫星天线伺服控制系统为例,它可以高精度的快速、准确的实现对目标卫星的校正,构建安全、稳定的持续信号输出链路,以实现通信服务。
天线平台和伺服平台是双系统的两种平台体制,后者具有两个不同的正交自由的天线座,分别是俯仰天线座和方位天线座。
与单平台的设计方案相比,上述结构的设计不仅可以有效提高伺服系统的带宽范围,而且还能够在一定程度上提升系统的谐振效率。
卫星天线伺服系统主要由以下几部分组成,分别是伺服电动机、限位开关、角度传感器、伺服控制器、测速电动机、PWM伺服控制驱动器、减速器等。
在伺服控制器系统中,俯仰和方位以对星开始,根据GPS数据来对计算机和卫星实现控制,并实时监测天线载机的飞行状态,以准确的得出俯仰的角度、天线的方位等信息,通过坐标换算可以得到相应的载体坐标系角度,最后借助一定的手段进行方位闭环的调整,可以使天线准确对准卫星,从而有效的实现卫星通信。
伺服控制器在航空航天领域的应用简介

伺服控制器在航空航天领域的应用简介简介:伺服控制器是一种用于控制和驱动伺服电机的电子设备。
在航空航天领域,伺服控制器发挥着重要的作用。
它们被广泛应用于航空航天器、导弹、卫星等空中和太空探索任务中的各种应用。
本文将介绍伺服控制器在航空航天领域的应用及其重要性。
1.导航和飞行控制:伺服控制器在飞机和其他航空器的导航和飞行控制系统中起着关键作用。
航空航天器的导航系统需要准确地测量飞行姿态、位置和速度,并进行实时调整。
伺服控制器通过控制伺服电机的转动来实现飞行器的稳定性和姿态控制。
它们能够根据飞行数据进行准确的修正,并调整飞行器的角度、位置和速度,确保飞行的安全和平稳。
2.地面控制系统:在航空航天领域中,地面控制系统扮演着重要的角色,用于监控和控制航空航天器的飞行。
伺服控制器广泛应用于地面控制系统中,通过远程控制机构、执行命令以及对飞行器进行实时状态监测和故障检测。
伺服控制器在地面控制系统中起到了连接和协调的作用,确保飞行器能够正常工作和完成任务。
3.卫星通信系统:在航空航天领域中,卫星通信系统对于空中和太空任务的成功至关重要。
伺服控制器用于控制卫星的定位和稳定,确保通信天线能够准确对准地面目标。
伺服控制器通过控制卫星的姿态和方向,使卫星能够稳定地保持与地面通信站点的联系。
它们确保了高质量的通信信号传输,提高了通信系统的可靠性和效率。
4.空间探测任务:伺服控制器在航天领域的空间探测任务中也发挥着重要作用。
例如,探测器和卫星需要精确的定位和导航能力,以便在太空中准确地执行任务。
伺服控制器用于控制太阳能电池板的方向和角度,以及控制航天器的定位和速度。
它们帮助探测器保持稳定和精确的运行状态,以收集和传输重要的科学数据。
总结:伺服控制器在航空航天领域的应用起到了关键的作用。
它们在飞行控制、导航和定位、通信系统以及空间探测任务中发挥着重要的功能。
伺服控制器通过精确控制伺服电机的运动,确保了航空航天器的稳定性、安全性和准确性。
便携式全自动卫星通信天线系统

便携式全自动卫星通信天线系统一.产品概述全自动卫星通信系统主要针对政府应急通信部门、人防、新闻媒体、移动通信运营商、公安、消防、边防、武警、部队、企事业等用户而设计的新一代卫星通信设备。
系统配备等效口径为1米的高性能偏馈型碳纤维抛物面天线及馈源系统,并采用短焦距设计,具有更强的便携性和易操作性。
高精度的卫星天线系统具有全自动的一键对星功能工作模式,设备从展开、跟踪、对星、调整、收藏均可全自动完成,安装简单,无须较准,快速对星,并具有全自动和手动两种工作模式。
断电时,配备有手摇柄可手动操作。
系统借助于高性能的信标接收机、高精度LNB、高可靠性传动系统和可靠稳定的天线控制系统及跟踪控制软件,使得其具有优秀的跟踪精度和100%的寻星准确率。
二.系统设计特点1.高度集成:天线反射系统采用短焦距距一体化的结构设计理念,充分实现了设备的一体化、小型化、智能化、简单化的特点,并在一个箱体中高度集成了天伺馈跟及射频信道的所有设备;2.通用性设计理念:整机结构通用设计,可安装市场主流的BUC和LNB,BUC功率目前BUC可配置到40W,同时BUC的用电可由天线内部综合供给电源提供;3.低仰角工作能力:天线设计工作仰角为+5~+90°,配合优异的旁瓣性能,可满足低仰角状态下的使用要求;4.高效率的通信系统:高性能天馈系统配备高效率BUC,使得系统具有更为强大的EIRP能力。
配置6.5W BUC时系统的上行EIRP达到48.7dBw,可满足多种需求下的使用要求;5.极低的上行插入损耗:采用专用旋转关节和异型波导连接BUC,配合专用的赋形喇叭,使得系统具备极低的插入损耗和良好的驻波特性,极大的增加了上行功率的可用度;6.卓越的信标接收机:专用双锁相环设计的信标接收机,配合防错锁软件功能,使得天线系统具有100%的对星准确率,同时具有低功耗以及信标、大载波两种工作模式;7.高效的电源供给系统:定制开发的综合供给电源,能够为集成到天线上的所有设备供电,包括BUC(满足40WBUC的供电需求)和LNB,并对外提供220VAC和18~60VDC两种接口供用户选择。
伺服控制系统的原理和应用
伺服控制系统的原理和应用伺服控制系统是一种广泛应用于工业自动化领域的控制系统,它能够实现对机械设备运动的高精度控制。
本文将介绍伺服控制系统的原理和应用。
一、原理伺服控制系统的基本原理是通过对反馈信号的检测和控制,实现对输出信号的精确控制。
它由三个主要组成部分构成:传感器、控制器和执行机构。
1.传感器:传感器的作用是将运动装置的位置、速度等物理量转换为电信号,以便于控制器对其进行处理。
常用的传感器有编码器、光电开关等。
2.控制器:控制器是伺服控制系统的核心部分,它根据输入信号和反馈信号的差异,计算出控制量,并输出控制信号。
常用的控制器有PID控制器、模糊控制器等。
3.执行机构:执行机构是根据控制信号进行动作的部件,它将控制器输出的信号转化为力、力矩或位置调整等具体动作,从而实现机械设备的运动控制。
执行机构常见的有伺服马达、电动缸等。
伺服控制系统通过反馈控制的方式,不断调整输出信号,使得系统能够快速、准确地响应输入信号的变化。
在控制过程中,控制器根据设定值和反馈值之间的差异,采取相应的控制算法,输出控制信号,进而使执行机构调整位置、速度或力矩。
二、应用伺服控制系统广泛应用于工业生产中的各种机械设备,如机床、印刷设备、包装设备等。
它具有以下几个主要的应用特点:1.高精度控制:伺服控制系统能够实现高精度的位置、速度和力矩控制,因此在需要精确运动控制的工业生产中得到广泛应用。
例如,机械加工行业对零件加工的精度要求较高,采用伺服控制系统能够提高加工精度和质量。
2.快速响应能力:伺服控制系统能够快速响应输入信号的变化,并通过反馈控制实现快速调节。
因此,在需要高速运动和频繁变换工作状态的设备中,伺服控制系统具备明显的优势。
例如,自动化物流设备中的输送带、机器人等,需要在短时间内实现快速移动和动作切换,伺服控制系统能够满足这些需求。
3.稳定性好:伺服控制系统具有较好的稳定性和抗干扰能力。
通过合理的控制算法和反馈机制,能够有效抑制外部干扰对系统的影响,从而保证系统的稳定性。
卫星天线指向跟踪伺服系统容错性设计
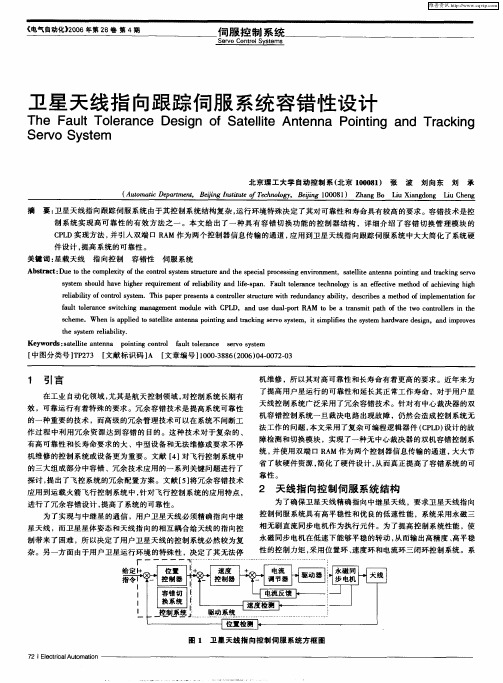
机维修 ,所 以其对高可靠性和长寿命有着更高的要求。近年来 为 了提高用户星运 行的可靠性和延长其正 常工作寿命 ,对于用户星 天线控制系统广 泛采用 了冗余 容错技术 。针对有 中心裁决器的双
关键词 : 星载天线
指 向控制
容错性
伺服系统
Absra t Duet h o t c: ot e c mplxt ft o r ls se sr t e a es ca r c s ig e vr n nt s t li ne a p itnga d ta kig s r o e iyo he c nto y t m tucur nd t pe ilp o e sn n io me , aelt a tnn on i rc n e v h e n s se s o l v ih rr q r me to la lt d l e s a . Fa l oe a c e hn lg sa f tv t o fa h e i g h g y t m h u d ha e hg e e ui e n fr ibii a i —p e yn f n u ttlr n e t c oo y i n e ecie me h d o c iv n i h e i l yo o to y tm rla i t fc n rls se . Thspa rprs nsa c nr le tucu ewih r d nd c ii b i i pe e e t o to lrsr t r t e u a y a lt n b y,de c b s ame o o s r e t d fi e n ain fr i h mplme tto o fu ttlr c wic n n g me tm o ue wi a l o e a e s thig ma a e n d l t CPLD, a d u e d l— r n h n s ua p tR M o b rns tpah o e t o t le s i h o A t e a ta mi t ft wo c n r lr n t e h o
自动跟踪GPS卫星的伺服转台天线对准系统

技术指标
1) 天线转台:机电伺服式、1 至 4 个天线 2) 参数输入:具有经纬度、时间、高度及时间参数输入(通过控制接口) ; 3) 数据精度:≤ 0.1 ; (按最新星历进行伺服控制) 4) 接口方式:RS422 与 CAN 口 5) 数据格式与协议:含经度、纬度、高度、时间、方位、俯仰的数据传输 6) 自动修正功能:能根据天线返回时间对方位及俯仰角进行修正; 7) 输入工作电压:5V DC±10%;
式中: X s 、 Ys 、 Z s 为卫星在 ECEF 坐标系中的直角坐标,由于 ECEF 坐标系是基于 WGS84 坐标系的椭球模型建立起来的,所以 X s 、 Ys 、
Z s 也就是卫星在 WGS84 坐标系中的直角坐标。
1.2 卫星的可见性 利用上述卫星位置的推算方法可以计算出某一时刻的 GPS 、 GLONASS 卫星的坐标位置。但是这样的坐标并不能直接体现出卫星 对用户的可见性。可见性是与站心坐标直接相关联的。站心坐标系有 两种形式:一种是站心直角坐标系;另一种是站心极坐标系。 站心直角坐标系的定义为(图二) :坐标系原点 Or 位于接收机,Z r
Yr 轴 轴与 Or 点的椭球法线相重合,X r 轴垂直于 Z r 轴指向椭球的短轴,
构成左手坐标系。 实际上, 它是一个当地地平 (北 垂直于 X r Or Z r 平面, 东天)坐标系, X r 指向北, Yr 指向东。 设 ( X ,Y , Z )T 、 ( X 0 , Y0 , Z 0 ) T 分别为卫星、在协议地球系中地坐标,
自动跟踪卫星的伺服转台天线对准系统
自动跟踪 GPS 卫星的伺服转台天线对准系统
自动跟踪 GPS 卫星的伺服转台天线对准系统主要功能是完成对 GPS 卫星的跟踪,最初选择卫星时(初始跟踪)应根据卫星分部保证 所选择的 4 颗卫星具有最好的几何布局 (几何精度因子 GDOP 最佳) , 接着根据轨道参数计算所跟踪卫星下一时刻的方位及俯仰, 保证连续 跟踪;同时,在跟踪过程中若发现有任何一颗跟踪卫星的俯仰角小于 25 度,则此时重新计算当前时刻几何精度因子 GDOP 最佳的 4 颗卫 星并重新设定为初值;正常情况下,每隔 60 分钟重新计算当前时刻 几何精度因子 GDOP 最佳的 4 颗卫星并重新设定为初值;总之,应 保证用跟踪的 4 颗卫星进行定位解算时能获得较佳的定位精度 (保证 所跟踪的 4 颗卫星中至少有 2 颗以上是 GPS 接收机用于定位的卫星) 。
卫星天线9220V天线控制系统说明书(修改

9221型天线控制系统使用说明书西安航天恒星科技股份有限公司电话:029-*******传真:029-******* 1.系统概述9221S型天线控制系统(ACS)是针对卫星通信地球站天线开发的伺服控制系统,系统具有可靠性高,操作简便等优点。
系统以单片微机作为控制器,显示采用240×64点阵图形式液晶显示器(LCD),所有工作模式及参数设置均采用菜单方式,使用户操作更加直观方便。
ACU根据天线方位(Az)、俯仰(El)轴传感器的位置,显示天线实时角度;根据面板操控键盘的状态、跟踪接收机的信号电平及天线状态产生到PDU的控制命令,并把PDU送来的状态(限位、系统故障等)显示出来。
ACU为19″标准机箱,高度为3.5 inch。
外型尺寸为482×88×410 mm (宽×高×深)。
PDU是天线控制系统的执行机构,9221SV型(选项)采用台达公司的VFD-M 型变频调速器实现调速控制。
PDU既可接收ACU的控制命令驱动天线转动,又可独立操作驱动天线转动。
驱动速度可由面板开关进行切换,以实现天线在换星、偏移、和收藏操作时的高速转动,以及为了保证平稳跟踪时的低速转动的要求。
而这两档速度由可根据需要(在天线结构允许的情况下)在变频调速器上设置。
在设计生产过程中,从元器件的选购、老化筛选到整机的可靠性实验都依照国军标执行,使系统可靠性得到了根本保证。
该系统主要包括天线控制单元(ACU)、天线驱动单元(PDU)、传感器及连接电缆等。
系统框图如图1所示:图 1 天线控制系统框图注:虚框内设备为外部设备,不属于本系统。
2.天线控制单元2.1主要功能和技术指标2.1.1主要功能a)天线实时位置显示ACU 根据天线方位、俯仰轴的位置,进行角度编码,并把方位、俯仰角度显示在LCD屏上。
为了醒目,角度采用图形方式用12×16点阵显示。
b)手动控制通过ACU面板上转向键的控制,可使天线在顺时针(CW)、逆时针(CCW)、上抬(UP)、或下俯(DOWN)四个方向上转动。
浅谈卫星天线伺服控制系统

浅谈卫星天线伺服控制系统摘要:随着社会的不断发展,人们对于卫星通信服务的需求越来越大,甚至人们的生活已经无法脱离卫星通信服务,在这样的背景下,必须要对卫星天线伺服控制系统进行进一步的研究,从技术层面保障人们的卫星通信需求为人类科技的进一步发展作出贡献。
为此,本文将简单探讨卫星天线伺服控制系统的相关内容。
关键词:卫星天线;伺服控制系统;卫星通信引言:卫星通信主要是利用中低轨道的卫星作为中继站,接收来自范围内的语音通信,并将信号转发给对应的接收目标。
随着卫星通信的不断发展,除了原有的语音通信功能之外,卫星还实现了全球范围内的通信功能,除此之外,所衍生出的全球定位系统也成为了人类日常生活和各行各业发展的重要技术,在军事、生产和交通领域。
产生了极为深远的影响。
伺服控制系统是机载卫星在运行过程中的一项重要系统,它能够保障地面目标与机载卫星之间实现实时连接,因此研究伺服控制系统对于卫星通信的发展有很大的帮助。
1.相关概述1.伺服控制系统的概述伺服控制系统是一项自动化控制系统,它是指通过机械位置和角度的方式对系统实现自动化控制的系统,该项技术被广泛应用于卫星通信或机械制造中,能够实现对控制目标进行准确快速定位的作用。
伺服控制系统相较于其他的自动化控制系统,在控制过程中具有响应速度快、定位足够准确、转动惯量较大的优点,为了满足伺服控制系统的工作,通常要配备专门的伺服电机,伺服电机的驱动单元便称之为伺服驱动单元[1]。
1.卫星伺服控制系统的原理为了满足卫星天线的特殊需求,要在将伺服控制系统设计在卫星天线的转向中,而在对卫星天线进行伺服系统的开发设计时,要根据卫星的星载计算机设置而满足工作目标。
通常要想实现卫星天线更快更精准的对准目标卫星,通常需要对其建立两个方位的伺服平台的天线座,从方位和仰俯两个角度实现天线方位自由自动化控制。
目前我国所采用的卫星天线伺服控制系统。
常见的频段包括Ka、Ku和C频段,C频段主要是卫星广播电台在使用,在电视频道或电台频道这些信号需求量较小的地方,通常会借助C频段实现较的数字业务传输。
移动接收卫星电视的天线自动跟踪系统分析

移动接收卫星电视的天线自动跟踪系统分析随着科技的不断发展,卫星电视已经成为人们日常生活中不可或缺的娱乐方式。
在过去,卫星电视接收设备通常需要固定安装在一个位置,而且需要手动对准卫星信号。
随着移动卫星电视的普及,人们需要更加灵活的接收方式,这就需要一种自动跟踪系统,能够随着车辆或船只的移动,自动调整天线的方向,以确保持续地接收卫星信号。
本文将对移动接收卫星电视的天线自动跟踪系统进行分析,并讨论其原理和应用。
1. 系统原理移动接收卫星电视的天线自动跟踪系统通常由天线、控制器和定位系统组成。
天线部分主要包括接收器和发射器,用于接收和发射卫星信号。
控制器是整个系统的核心部分,它可以通过GPS或其他定位系统获取当前的位置信息,然后根据卫星的参数,计算出天线应该调整的方向和角度。
定位系统则用来提供实时的位置信息,以便控制器及时调整天线的方向。
整个系统通过这三部分的协作,可以实现对移动车辆或船只的跟踪,并持续地接收卫星信号。
2. 技术难点移动接收卫星电视的天线自动跟踪系统在实现过程中面临着一些技术难点。
首先是如何精准地获取当前位置信息。
虽然GPS可以提供较为准确的位置信息,但是在一些特殊环境下,例如在高楼群中或者在密集的树林中,GPS信号可能会受到干扰,导致定位不准确。
天线的自动调整也需要考虑到天线本身的性能和机械结构,确保在高速运动和恶劣环境下仍能稳定地工作。
卫星信号的频率、极化和方向也需要考虑在内,以确保系统能够正确地接收到卫星信号。
3. 应用展望移动接收卫星电视的天线自动跟踪系统在旅游、户外活动、船只和车辆等领域有着广泛的应用前景。
在旅游方面,人们可以在自驾游或露营中使用移动卫星电视,随时随地观看喜欢的节目。
在户外活动中,移动卫星电视可以为人们提供更多的娱乐选择。
在船只和车辆中,移动卫星电视可以为船员和司机提供娱乐和信息服务,提高工作和生活质量。
由于移动卫星电视的便利性和灵活性,相信在未来的市场中会越来越受到人们的欢迎。
一种卫星天线伺服控制系统的设计

一种卫星天线伺服控制系统的设计施未勋;徐建萍【期刊名称】《自动化应用》【年(卷),期】2011(000)012【摘要】介绍应用于某卫星天线机构上的天线伺服控制系统。
系统基于FPGA,将计算机给定的转向角度指令转换成脉冲,实现平稳地转动天线达到指定位置,同时,旋变模块将天线实际转动的角度信息反馈给天线伺服控制系统,实现天线跟踪指向运动等功能。
%The antenna servo control system for a satellite antenna is introduced. The system is based on FPGA. The system converses the given steering angle instruction form the computer into pulse and smoothly rotates antenna to the specified location. In the same time, the rotate and converse module feed the actual angle of the antenna back to the servo system. The antenna motion tracking and pointing functions are implemented.【总页数】3页(P15-17)【作者】施未勋;徐建萍【作者单位】上海航天局804所,上海201109;上海航天局804所,上海201109【正文语种】中文【中图分类】TN711.3【相关文献】1.一种新型卫星天线寻星仪的设计构想 [J], 喻强2.一种车载静中通卫星天线的设计 [J], 宋建虎;吴云皓;张义坡3.一种卫星天线热变形测量系统设计 [J], 柏宏武;刘博学;马小飞4.一种远程动中通卫星天线的设计与实现 [J], 李凌凌; 刘羽; 林光阳5.基于自适应滑模变结构的卫星天线指向伺服控制系统设计 [J], 余创;刘向东因版权原因,仅展示原文概要,查看原文内容请购买。
某卫星通信天线伺服系统的设计与实现
某卫星通信天线伺服系统的设计与实现章百宝;陈涛【摘要】To realize the rapidity and veracity of aligning with the satellitefor vehicle⁃mounted satellite communication an⁃tenna,a satellite communication antenna servo system with DSP+FPGA as its control core was designed. The composition,working principle and hardware block diagram for the system are described. The parameters of motor are calculated particularly. The pro⁃cess of the antenna′s satellite founding and servo control algorithm are elaborated and designed. The implementation of the servo system is helpful to cost reduction of satellite communication system,and the rapidity and veracity improvement of aligning with the satellite.%为实现车载卫星通信天线对星的快速性和准确性,设计了一套以DSP+FPGA架构为控制核心的卫星通信天线伺服系统,介绍了该系统的组成、工作原理及硬件原理框图,并对电机选型参数做了详细计算,对天线寻星过程和伺服控制算法做了详细描述和设计。
该伺服系统的设计与实现对降低卫星通信系统成本、提高卫星通信天线对星的快速性和准确性具有一定的工程参考价值。
基于自适应滑模变结构的卫星天线指向伺服控制系统设计

系统仿真学报
Vol. 19 No. 6 Mar., 2007
∆θn
ASMC
ωn*+
−
ωn
PI
iq* +
−
id* = 0 + iq
−
id
光电编码器
PI PI
uq* d
uα*
ud* q α uβ* β
SV PWM
三相 逆变 器
θ d iα
q α iβ β
α
ia
β
ib
a b c ic
射频敏感器
天线
齿轮传动
X=
3uβ
Tm ud
,
Y
=(
3 2
uβ
+
3 2
uα
)
Tm ud
,
Z=(
3 2
uβ
−
3 2
uα
)
Tm ud
;
If N =1, T1=Z and T2 =Y ; If N =2, T1=Y and T2 = − X ;
If N =3, T1= − Z and T2 =X ; If N =4, T1= − X and T2 =Z;
个电压标量变换成 1 个电压矢量。
us
=
2 3 (ua
+
ube
j
2 3
π
+
uce
j
4 3
π
)
(2)
按照式(2)的定义,控制电机三相逆变器上下桥臂的不同
开关状态将输出如图 2 所示在空间分布的八个基本电压矢
量。利用这八个基本空间矢量,通过控制相邻两空间矢量的
作用时间和作用顺序,可以得到在空间旋转的电压矢量,而
卫星天线伺服控制系统设计与开发

学位论文作者签名: 签字日期: 年 月 日
导师签名: 签字日期: 年 月 日
摘 要
随着社会的发展,人们对卫星通信的需求越来越大,而实现卫星通信的关键 在于天线能够准确的对准目标卫星。本文以某 Ku 频段的机载卫星天线为基础, 对卫星天线的伺服系统进行研究,目的是使天线能够快速、稳定、准确的对准目 标卫星,以建立稳定、可靠的通信链路。 本文首先对卫星天线伺服系统的原理进行了介绍,并分别对伺服系统的各个 组成部分做了详尽的描述。然后通过对伺服控制系统各个组成元器件的建模,推 导出了伺服系统双闭环位置回路的数学模型,并对环路进行分析。最后对数字 PID 控制器进行了介绍和分析。 本文详述了伺服控制系统控制器的硬件和软件的设计和具体实现方法。硬件 部分主要介绍了轴角编码解码电路、 限位检测电路、 电源电路和差分放大器电路。 软件部分介绍了软件的开发环境,对主程序及各子程序模块进行了讲解,并对数 字 PID 控制算法进行了研究。 对伺服系统的性能进行验证和分析, 并给出了测试 的结果。 最后通过对传统 PID 控制器的分析,引出并介绍了自抗扰控制技术,对自抗 扰控制器的组成部分进行了详细的介绍。 然后讨论了基于自抗扰技术的卫星天线 伺服系统控制器的设计,给出了控制器设计方案,并进行 Matlab 仿真验证。
学位论文作者签名:
签字日期:
年
月
日
学位论文版权使用授权书
本学位论文作者完全了解 天津大学
有关保留、使用学位论文的规定。
特授权 天津大学 可以将学位论文的全部或部分内容编入有关数据库进行检 索,并采用影印、缩印或扫描等复制手段保存、汇编以供查阅和借阅。同意学校 向国家有关部门或机构送交论文的复印件和磁盘。 (保密的学位论文在解密后适用本授权说明)
伺服技术在卫星跟踪中的应用

伺服技术在卫星跟踪中的应用卫星技术在现代化社会中发挥着重要作用,如卫星通信、卫星导航等。
在卫星跟踪和控制方面,伺服技术是关键技术之一。
它通过对系统输出与期望值进行比较,控制执行器的运动,实现对卫星轨道的控制,使其满足任务要求。
一、伺服技术简介伺服技术是一种基于反馈的控制系统,它通过检测输出信号和期望信号之间的误差,用该误差信号来控制执行器的运动,使得输出信号可以跟随期望信号变化而变化。
伺服技术应用广泛,如航空、导航、卫星跟踪等。
二、伺服技术在卫星跟踪中的应用在卫星跟踪中,伺服技术主要应用于卫星的轨道控制。
卫星跟踪中的目标是使卫星在正确的轨道上运动,保持正确的位置和速度。
伺服技术可以通过控制执行器的运动来实现这一目标。
卫星跟踪中的伺服系统主要由两个部分组成:反馈环节和执行环节。
反馈环节主要用于检测卫星的位置和速度,将检测到的信号与期望信号进行比较,计算误差信号。
执行环节则根据误差信号来控制卫星的运动,使其达到期望值。
三、伺服技术的进展和挑战伺服技术在卫星跟踪中的应用已经有了长足的进展。
随着科技的发展,伺服技术不断升级,可以更加准确地控制卫星的运动。
但是,也面临着一些挑战。
首先,伺服系统需要具有高精度的检测和运动控制能力。
其次,卫星的位置和速度等参数可能受到一些干扰因素的影响,在这种情况下,伺服技术需要具有一定的鲁棒性。
此外,伺服技术还需要考虑能源消耗和电磁兼容等问题。
四、结论伺服技术在卫星跟踪中的应用具有重要意义,可以保证卫星的正常运行,同时也对卫星技术的发展起到了积极的推动作用。
随着技术不断升级,伺服技术将会在卫星跟踪中发挥更加重要的作用,同时也需要不断进行研究和探索,以应对未来的挑战。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全自动卫星天线定位伺服控制系统
本控制系统是专门为4.5M卫星天线设计制作,通过本控制系统可方便地进行天线的方位、俯仰和极化的角度调整。
由于采用了新型交流伺服控制器,使天线的各角度的控制精度得以大幅提高,在目前国内同类系统中应用技术较为先进。
(一)卫星天线控制系统的方案
采用我公司生产的交流伺服控制器和交流异步电机组成的伺服驱动单元,以可编程控制器、可编程终端等组成控制单元。
系统构成方案如图所示。
(二)系统功能及技术指标
该系统由室内控制单元和室外伺服驱动单元组成,通过可编程终端显示的文字提示进行操作。
交流伺服控制器驱动天线机构上的交流异步电机实现精确的位置、速度控制,以实现天线的方位、俯仰和极化的角度调整。
安装在电机上的编码器不仅为交流伺服控制提供反馈信息,而且为室内控制单元提供天线的方位、俯仰信息,经数据处理后用于控制和显示角度。
软件在实现系统的各种功能中起着非常重要的作用。
本系统的软件有交流伺服控制器(3台)的程序、可编程控制器的程序和可编程终端的程序。
这几种程序分别担负着人机界面、数据处理、动作控制以及状态监视等各种作用。
与天线方位有关的软件部分对应于天线和本系统安装在北半球。
动作范围:方位90.00°(东)~270.00°(西)[正南为180°]
俯仰 5.00°(俯)~90.00°(仰)
极化±90°
动作方式:
⑴角度操作:设定角度值,运动至设定位置。
(对好第一颗星之后)
⑵步进操作:选择步进距(小步距0.01°、中步距0.05°、大步距0.25°)后,单键操作,按1次键,运动1步。
⑶启停操作:选择电机转速(方位、俯仰和极化的速度分挡不同)后,单键操作,按1次运动、再按1次停止。
换星操作:按序号登录5颗星的方位角、俯仰角数据。
设定目标星号后执行换星。
非常快捷、方便。
若所设定的星号未登录则不执行并提示“无效”。
防护操作:俯仰运动至87.00°使天线朝上,在遇强风时防止机构或基础的损害。
限位保护:设有限位开关和极限开关。
方位可设定软极限。
设定后限制方位角度范围,防止干涉或碰撞。
控制精度:与电机同轴装有2500线的编码器,作为位置及速度的传感器。
天线的方位轴是经减速器后,0.01°间距对应2333个脉冲;俯仰轴是经减速器后,0.01°间距对应约20000个脉冲。
交流伺服控制器将编码器的信息是按4倍频(10000脉冲/转)进行数据处理。
而且,它的位置控制精度可达±1个脉冲。
因此、天线的综合控制精度相当高。
间隙补偿: 每当电机转动改变方向时,减速器和机构等机械部件会有换向间隙。
用伺服控制能补偿实测的间隙量。
角度显示:卫星天线的位置数据是以有2位小数的角度值表示。
方位角度是3位整数2位小数。
4舍5入至小数点后第2位。
俯仰角度是2位整数2位小数。
4舍5入至小数点后第2位。
极化角度不显示。
报警提示:交流伺服控制器监视,异常时有文字提示。
限位和原点传感器监视,异常时有文字提示。
使用电源:控制单元AC 220V±10%(单相) 50Hz 100W 伺服驱动单元AC220V±10%(单相) 50Hz 1000Wmax
外型尺寸:室内控制单元 (标准19吋3U) L:300 W:430 H:134(mm)
室外伺服驱动单元 L:250 W:600 H:800(mm)
工作环境温度:室内控制单元0℃~40℃
室外伺服驱动单元-30℃~40℃(内有温度调节单元)
(三)特点
⑴.与卫星通讯设备一致,本系统采用单相交流220V电源。
⑵.以对准第一颗卫星时登录的天线方位、俯仰角度为数据,方便、快速地进行对星、换星的操作。
基准
⑶.使用交流伺服控制器,定位控制精度高,重复好。
⑷.有互锁、限位等多项安全防护功能。
⑸.交流异步电机是在温度、湿度变化很大的露天中使用,能够免维护的正常运行。
(四)结论
采用我公司的伺服产品构成系统,用于中大直径的卫星天线的角度调整,其控制精度高、功能多、操作方便、安全可靠、成本节约。