飞思卡尔MC9S12XS128各模块初始化程序--超详细注释
飞思卡尔MC9S12XS128串口相关功能函数
} // 返回目标数据长度 returnSrcLength / 2; } // 字节数据转换为可打印字符串 // 如:{0xC8, 0x32, 0x9B, 0xFD, 0x0E, 0x01} --> "C8329BFD0E01" // pSrc: 源数据指针 // pDst: 目标字符串指针 // nSrcLength: 源数据长度 // 返回: 目标字符串长度 int gsmBytes2String(const unsigned char*pSrc, char* pDst, int nSrcLength) { const char tab[]="0123456789ABCDEF"; // 0x0-0xf的字符查找表 for(int i=0; i { // 输出低4位 *pDst++ = tab[*pSrc >> 4]; // 输出高4位 *pDst++ = tab[*pSrc & 0x0f]; pSrc++; } // 输出字符串加个结束符
飞思卡尔MC9S12XS128单片机各模块使用方法及寄存器配置

飞思卡尔MC9S12XS128单片机各模块使用方法及寄存器配置手把手教你写S12XS128程序--PWM模块介绍该教程以MC9S12XS128单片机为核心进行讲解,全面阐释该16位单片机资源。
本文为第一讲,开始介绍该MCU的PWM模块。
PWM 调制波有8个输出通道,每一个输出通道都可以独立的进行输出。
每一个输出通道都有一个精确的计数器(计算脉冲的个数),一个周期控制寄存器和两个可供选择的时钟源。
每一个P WM 输出通道都能调制出占空比从0—100% 变化的波形。
PWM 的主要特点有:1、它有8个独立的输出通道,并且通过编程可控制其输出波形的周期。
2、每一个输出通道都有一个精确的计数器。
3、每一个通道的P WM 输出使能都可以由编程来控制。
4、PWM 输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM 计数器为0时,改变周期和脉宽才起作用。
6、8 字节或16 字节的通道协议。
7、有4个时钟源可供选择(A、SA、B、SB),他们提供了一个宽范围的时钟频率。
8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每一个通道都可以通过编程实现左对齐输出还是居中对齐输出。
1、PWM启动寄存器PWMEPWME 寄存器每一位如图1所示:复位默认值:0000 0000B图1 PWME 寄存器每一个PWM 的输出通道都有一个使能位P WMEx 。
它相当于一个开关,用来启动和关闭相应通道的PWM 波形输出。
当任意的P WMEx 位置1,则相关的P WM 输出通道就立刻可用。
用法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第一个波形可能是不规则的。
当输出通道工作在串联模式时(PWMCTL 寄存器中的CONxx置1),那么)使能相应的16位PWM 输出通道是由PWMEx 的高位控制的,例如:设置PWMCTL_CON01 = 1,通道0、1级联,形成一个16位PWM 通道,由通道 1 的使能位控制PWM 的输出。
飞思卡尔16位单片机9S12XS128使用和程序

飞思卡尔16位单片机9S12XS128使用收藏最近做一个关于飞思卡尔16位单片机9S12XS128MAA的项目,以前未做过单片机,故做此项目颇有些感触。
现记录下这个艰辛历程。
以前一直是做软件方面的工作,很少接触硬件,感觉搞硬件的人很高深,现在接触了点硬件发现,与其说使用java,C#等语言写程序是搭积木,不如说搞硬件芯片搭接的更像是在搭积木(因为芯片是实实在在拿在手里的东西,而代码不是滴。
还有搞芯片内部电路的不在此列,这个我暂时还不熟悉)。
目前我们在做的这个模块,就是使用现有的很多芯片,然后根据其引脚定义,搭接出我们需要的功能PCB板,然后为其写程序。
废话不多说,进入正题。
单片机简介:9S12XS128MAA单片机是16位的单片机80个引脚,CPU是CPU12X,内部RAM 8KB,EEPROM:2KB,FLASH:128KB,外部晶振16M,通过内部PLL可得40M总线时钟。
9S12XS128MAA单片机拥有:CAN:1个,SCI:2个,SPI:1个,TIM:8个,PIT:4个,A/D:8个,PWM:8个下面介绍下我们项目用到的几个模块给出初始化代码1、时钟模块初始化单片机利用外部16M晶振,通过锁相环电路产生40M的总线时钟(9S12XS128系列标准为40M),初始化代码如下:view plaincopy to clipboardprint?/******************系统时钟初始化****************/void Init_System_Clock(){asm { // 这里采用汇编代码来产生40M的总线LDAB #3STAB REFDVLDAB #4STAB SYNRBRCLR CRGFLG,#$08,*//本句话含义为等待频率稳定然后执行下一条汇编语句,选择此频率作为总线频率BSET CLKSEL,#$80}}/******************系统时钟初始化****************/void Init_System_Clock(){asm { // 这里采用汇编代码来产生40M的总线LDAB #3STAB REFDVLDAB #4STAB SYNRBRCLR CRGFLG,#$08,*//本句话含义为等待频率稳定然后执行下一条汇编语句,选择此频率作为总线频率BSET CLKSEL,#$80}}上面的代码是汇编写的,这个因为汇编代码量比较少,所以用它写了,具体含义注释已经给出,主函数中调用此函数即可完成时钟初始化,总线时钟为40M.2、SCI模块初始化单片机电路做好了当然少不了和PC之间的通信,通信通过单片机串口SCI链接到PC 端的COM口上去。
飞思卡尔MC9S12XS128单片机重点模块讲解

基于飞思卡尔 MC9S12XS128MCU 的模块讲解及测试
安徽工业大学 自动化系 刘昌元 delay(500); if(LED==0x80) LED=0x01; } } 综合以上的两段代码看在 52 单片机和 128 单片机上编程思路基本上没大的区别,唯一的区 别就是 128 单片机有数据方向寄存器来管理 I/O 口。 � 将部分端口做输入口使用,另外一部分端口做输出口使用时:例如我们将 PORTB 的端 口 B7 用来做输入口,B0-B5 口做输出指示,测试代码如下:
�
以端口 A 和端口 B 为例讲解,以上是我截取的技术手册上的,从上来看 A 口和 B 口各 有 8 个口,且 A0-A7;B0-B7 全部作为 GPIO (通用输入输出口 )使用。此处 A 口和 B 口 使用方法是一样的,我姑且就以端口 A 来讲解。 A 口和 B 口作为通用输入输出口使用时我们只需要掌握 4 个寄存器即可。 PORTA (A 口
�
这一点和 51 单片机的 I/O 口有区别,在典型的 51 单片中 P0 口内部没有上拉电阻,但作为 I/O 口使用时需要外接排阻。其他 P1-P3 口则可以直接作为双向口使用,51 单片在上电复位 后端口被默认的置 1.在 51 单片中端口的某一位置 0 时端口作为输出口使用,置 1 时作为输 入口使用。例如如果我们想把 P1 作为输出口使用时我们可以在程序开始时写 P1=0x00; 如果 我们想把 P1 口作为输入口使用时我们可以写 P1=0xff; 这一点正好和飞思卡尔的 128 单片机 相反,另外 128 单片有专门的数据方向寄存器 DDRA 或者 DDRB 等来管理各个端口的输入 输出选择,51 单片没有。如果我们想把端口 A 作为输入口使用,我们只需写 DDRA=0x00; 即所有位都置 0,如果我们想把端口 A 作为输出口使用,我们只需要写 DDRA=0xff; 即所有 位都置 1 ,而如 果我们想要 把端口 A 的高四 位做输入口 ,低 4 位做输 出口时我们 就 写 DDRA=0x0f; 当我们需要将该端口的某一位做输出或者输入口使用时只需要将该端口对应的 方向位置 1 或者置 0 即可。例如我们想把 A3 口作输入口, A4 口作输出口使用时我们只需 要写: DDRA_DDRA3=0; DDRA_DDRA4=1; 即可。 � � 对于数据方向寄存器的使用只要记住:置 1——输出 置 0——输入 PORTA 数据寄存器也是由 8 位组成,任何时候都可以对它进行读写操作。
飞思卡尔MC9S12XS128功能模块驱动
用了一年多飞思卡尔MC9S12XS128这款处理器,现在总结下各个功能模块的驱动.//锁相环时钟的初始化总线频率为40MHz(总线时钟为锁相环时钟的一半)//晶振为11.0592MHzvoid PLL_init(void) //PLLCLK=2*OSCCLK*(SYNR+1)/(REFDV+1) { //锁相环时钟= 2*11.0592*(39+1)/(10+1)=80MHz 总线时钟为40MHzREFDV=0x0A;SYNR=0x67; //0110_0111 低6位的值为19,高两位的值为推荐值while(CRGFLG_LOCK != 1);CLKSEL_PLLSEL = 1; //选定锁相环时钟//FCLKDIV=0x0F; //Flash Clock Divide Factor 16M/16=1M}//周期中断定时器的初始化-// //周期中断通道1用于脉冲累加器的定时采样,定时周期为: 10ms= (199+1)*(1999+1)/(40M) (没有使用)//周期中断通道0用于控制激光管的轮流发射,定时周期为: 2000us= (399+1)*(199+1)/(40M)//2011/4/4 15:24 定时时间改为1msvoid PIT_init(void){PITCFLMT_PITE = 0; // 禁止使用PIT模块 PITCFLMT :PIT 控制强制加载微计数器寄存器。
PITCE_PCE0 = 1; // 使能定时器通道0//PITCE_PCE1 = 1; //使能定时器通道1PITMUX = 0; //通道0,和通道1均选择8位微计数器0//修改时间只需要改下面四行PITMTLD0 = 199; //向8位微计数器中加载的值PITLD0 = 199; //向16位计数器中加载的值//PITMTLD1 = 39; //向8位微计数器中加载的值 8位,最大值不要超过255//PITLD1 = 1999; //向16位计数器中加载的值PITINTE |= 0x01; //使能定时器通道0的中断PITCFLMT_PITE = 1;//使能PIT模块}//脉冲累加器的初始化, PT7口外接光电编码器//最新修改: 2011/3/25 16:53void PT7_PulAcc_Init(void){DDRT &= 0x77;//设置PT7,PT3口为输入(硬件上PT7,PT3通过跳线联到了一块)PERT |= 0x80; //使能通道7的上拉电阻PPST &= 0x7f; //电阻设为上拉电阻TCTL4 &= 0x3f; //禁止PT3的输入捕捉功能PACTL = 0x50; //启动脉冲累加计数器,上升沿触发,禁止触发中断和溢出中断,主定时器禁止}//通道1用于控制舵机1 PWM 高电平有效,//通道3用于控制电机1 PWM 低电平有效,这与前两代车高电平有效有区别!!!!!//通道7用于给上排激光管提供PWM信号 PWM高电平有效!!!!!//通道6用于给下排激光管提供PWM信号 PWM高电平有效!!!!!// 2011-03-17 7:56 增加了A端口的使用新增通道6//2011-6-9 23:03 //增加了通道4,5的联合使用,用于控制下排方向舵机 void PWM_init(void){PWME = 0x00;//PWM禁止PWMPRCLK = 0x03; // ClockA=40M/8=5M, Clock B = 40M/1=40M PWMSCLB = 10; // Clock SB= 40/2*10= 2MHz(供电机)PWMSCLA = 5; // SA = Clock A/2*5 = 5M/10 = 500K = SA 用于控制舵机PWMPOL = 0xe2; //1110_0010通道7,通道6与通道1、通道5先输出高电平然后输出低电平,POLx=1先输出高电平后输出低电平; PPOLx=0先输出低电平)PWMCAE = 0x00; // 左对齐输出(CAEx=0为左对齐,反之为中心对齐)//PWMCLK = 0010_1010 (0 1 4 5位控制SA_1;或A_0; 2 3 6 7位控制SB_1 或B_0)//为PWM通道1选择时钟 SA(500KHz),//为PWM通道5选择时钟 SA(500KHz),//为通道3选择时钟 SB(10MHz)//为通道7选择时钟B(40MHz)//为通道6选择时钟B(40MHz)PWMCLK = 0x2A; //0010_1010PWMCTL = 0x70; //0111_0000 CON45=1,把通道4,5联合使用。
飞思卡尔MC9S12XS128各模块初始化程序--超详细注释
飞思卡尔MC9S12XS128各模块初始化程序--超详细注释//**************************************************************************// 武狂狼2014.5.1 整理// 新手入门的助手////***************************************************************************注释不详细/*********************************************************/函数名称:void ATD0_init(void)函数功能:ATD初始化入口参数:出口参数:/***********************************************************/void ATD0_init(void){ATD0DIEN=0x00; //使用模拟输入功能|=1;数字输入功能// ATD0CTL0=0x07; //Bit[3:0]WRAP[3:0] 反转通道选择位ATD0CTL1=0x40; // 12位精度,采样前不放电 Bit[7]ETRIGSEL(外部触发源选择位。
=0选择A/D通道AN[15:0] |=1选择 ERTIG3~0)和Bit[3:0]ETRIGCH[3:0]选择外部触发通道// Bit[6:5]SRES[1:0]A/D分辨率选择位。
Bit[4]SMP_DIS =0采样前不放电|=1采样前内部电容放电,这会增加2个A/D时钟周期的采样时间,有助于采样前进行开路检测ATD0CTL2=0x40; // 快速清零,禁止中断,禁止外部触发ATD0CTL3=0x90; // 右对齐,转换序列长度为2,非FIFOATD0CTL4=0x03; // 采样时间4个周期,PRS=31,F(ATDCLK)=F(BUS)/(2(PRS+1))// ATD0CTL5=0x30; //启动AD转换序列//:对每项数据采集时,用到哪个通道采样可在相应子函数内设置某一通道(见Sample_AD.c)while(!ATD0STAT2L_CCF0);/*********************************************************/函数名称:void PIT_init(void)函数功能:初始化PIT 设置精确定时时间(1s)入口参数:无出口参数:无说明:无/***********************************************************/void PIT_init(void){PITCFLMT=0x00; //禁止PIT模块Bit[7] PITE:PIT模块使能位,0禁用|1使能// Bit[6] PITSWAI:等待模式下PIT停止位,0等待模式下,PIT模块正常运行| 1等待模式下,PIT模块停止产生时钟信号,冻结PIT模块// Bit[5] PITFRZ: 冻结模式下PIT计数器冻结位。
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤w
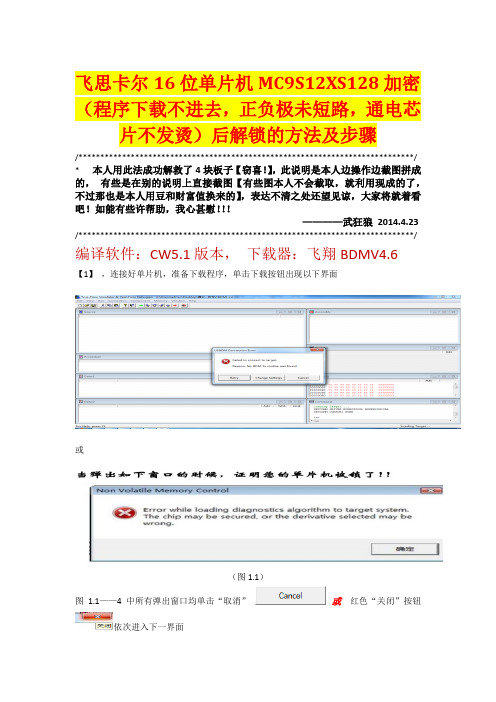
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤/*****************************************************************************/ *本人用此法成功解救了4块板子【窃喜!】,此说明是本人边操作边截图拼成的,有些是在别的说明上直接截图【有些图本人不会截取,就利用现成的了,不过那也是本人用豆和财富值换来的】,表达不清之处还望见谅,大家将就着看吧!如能有些许帮助,我心甚慰!!!————武狂狼2014.4.23 /*****************************************************************************/编译软件:CW5.1版本,下载器:飞翔BDMV4.6 【1】,连接好单片机,准备下载程序,单击下载按钮出现以下界面或(图1.1)图 1.1——4中所有弹出窗口均单击“取消”或红色“关闭”按钮依次进入下一界面(图1.2)(图1.3)(图1.4)******************************************************************************* *******************************************************************************【2】单击出现如下图所示下拉列表,然后单击(图2.1)出现下图(图2.2)对话框,按下面说明操作(图2.2)弹出图2.3,单击按钮,依次出现如图2.4--5窗口,均单击(图2.3)(图2.4)******************************************************************************* *******************************************************************************【3】单击出现下拉列表,然后单击下拉列表中单击按钮出现如下界面,单击选择相对应的单片机型号(我选的红色方框里的HCS12X….),单击OK. PS:【此步骤是本人自己试出来的,若不进行此操作,图3.3中下拉列表中无要找选项】(图3.1)(图3.3)(图3.4)(图3.5)红色方框2中默认即为所要选的文件,此步只需单击确认按钮即可,如有不同读者酌情处置。
飞思卡尔MC9S12XS128(定时器)ECT寄存器详解

1、定时器IC/OC功能选择寄存器TIOSIOS[7..0]IC/OC功能选择通道0 相应通道选择为输入捕捉(IC)1 相应通道选择为输出比较(OC)2、定时器比较强制寄存器 CFORCFOC[7..0]设置该寄存器某个FOCn位为1将导致在相应通道上立即产生一个输出比较动作,在初始化输出通道时候非常有用。
【说明】这个状态和正常状态下输出比较发生后,标志位未被置位后的情况相同。
3、输出比较7屏蔽寄存器 OC7MOC7M[7..0]OC7(即通道7的输出比较)具有特殊地位,它匹配时可以直接改变PT7个输出引脚的状态,并覆盖各个引脚原来的匹配动作结果,寄存器OC7M决定哪些通道将处于OC7的管理之下。
OC7M中的各位与PORTT口寄存器的各位一一对应。
当通过TIOS将某个通道设定为输出比较时,将OC7M中的相应位置1,对应的引脚就是输出状态,与DDR中的对应位的状态无关,但OC7Mn并不改变DDR相应位的状态。
【说明】OC7M具有更高的优先级,它优于通过TCTL1和TCTL2寄存器中的OMn和OLn设定的引脚动作,若OC7M中某个位置1,就会阻止相应引脚上由OM和OL设定的动作。
4、输出比较7数据寄存器 OC7DOC7D[7..0]OC7M对于其他OC输出引脚的管理限于将某个二进制值送到对应引脚,这个值保存在寄存器OC7D中的对应位中。
当OC7匹配成功后,若某个OC7Mn=1,则内部逻辑将OC7Dn送到对应引脚。
OC7D中的各位与PORTT口寄存器的各位一一对应。
当通道7比较成功时,如果OC7M中的某个位为1,OC7D中的对应位将被输出到PORTT的对应引脚。
【总结】通道7的输出比较(OC7)具有特殊的位置,在OC7Mn和OC7Dn两个寄存器设置以后,OC7成功输出后将会引起一系列的动作。
比如:OC7M0=1,则通道0处在OC7的管理下,在OC7成功后,系统会将OC7D0的逻辑数据(仅限0或者1)反应在PT0端口上。
飞思卡尔2014mc9s12xs128学习及智能车制作笔记
S128学习笔记(一)GPIO 模块S128 IO操作主要有三个寄存器数据寄存器(PORTX)数据方向寄存器(DDRX) 上拉上拉电阻控制寄存器PUCR)一. GPIO概述通用I/O:GPIO(General Purpose I/O),是I/O的最基本形式,它是一组输入或输出引脚,有时也称为并行I/O(parallel I/O)。
作为普通输入引脚,MCU内部程序可以读取该引脚,知道该引脚是“1”(高电平)或“0”(低电平),即开关量输入。
作为普通输出引脚,MCU内部程序由该引脚输出“1”(高电平)或“0”(低电平),即开关量输出。
大多数通用I/O引脚可以通过编程来设定工作方式为输入或输出,称之为双向通用I/O。
2. I/O口的使用方法MC9S12DG128 MCU有10个普通I/O口,分别是A口、B口、E口、H口、J口、K口、M 口、P口、S口、T口。
这些引脚中的大部分具有双重功能,其中A、B、E、K口只用做GPIO 功能,这里仅讨论它们编程方法。
使用这些I/O口主要设置如下寄存器:1)数据方向寄存器(Data Direction Register x,DDRx)DDRx的第7~0位分别记为DDRx7~DDRx0,这些位分别控制着x口引脚PORTx7~PORTx0是输入还是输出,若DDRxn=0,则引脚PORTAxn为输入,若DDRxn=1,则引脚PORTxn为输出。
复位时DDRx为$00。
(注:x代表A、B、E、K口中的某一个,n表示某一位)2)数据寄存器(Port x I/O Register,PORTx)PORTx的第7~0位分别记为PORTx7~PORTx0。
若A口的某一引脚PORTxn被定义。
成输出,程序使x口I/O寄存器PORTx的相应位PORTxn=0,则引脚PORTxn输出“低电平”;程序使PORTxn=1,则引脚PORTxn输出“高电平”。
若x口的某一引脚PORTxn被定义成输入,程序通过读取x口I/O寄存器PORTx,获得输入情况,0表示输入为“低电平”,1表示输入为“高电平”。
飞思卡尔PWM程序(含详细指令说明)

//在任何时间都是可读、可写的,复位时全置0。应当注意的是,如果当一个 PWM
//输出波形正在产生时,时钟改变,这时就会产生一个平头的或线形脉冲。
//用法: PCLK1=1; 1 通道的时钟源设为 SA。 PCLK1=0; 1 通道的时钟源设为 A。
//如果通道不可用,那么对周期寄存器进行写操作,将会直接导致周期寄存器同缓冲器一起
//闭锁。
//周期的计算方法:(因为左对齐和居中对齐方式输出时的计数器工作方式不一样)
//1) 当 CAEx=0时,即进行左线性输出时:
// `PWMx 周期=通道时钟周期*PWMPERx
PWMPOL_PPOL3=1; // Duty=High Time 极性设置
//3通道对外输出为先高后低(PWMPOL_PPOL3=0 则3通道对外输出为先低后高)
PWMCAE_CAE3=0; // Left-aligned 对齐方式设置
//------------------------------------------------------------------------------------------------------------------//
//功能说明:MC9S12XS128--PWM例程
//使用说明:实现通道3(PTP3)输出频率为1KHz,占空比为50%的方波,用示波器观察
//决定了相关 PWM 通道的周期。 每一个通道的周期寄存器都是双缓冲的,因此如果当通
//道使能后,改变他们的值,将不会发生任何作用,除非当下列情况之一发生:
//*有效的周期结束。
MC9S12XS128例程
MC9S12XS128例程SCI程序串行通信时MCU与外部设备之间进行通信的一种简单而有效的硬件方法。
无论用查询方式还是中断方式进行串行通信编程,在程序初始化时均必须对SCI进行初始化。
初始化主要包括波特率设置、通信格式的设置、发送接收数据方式的设置等。
对SCI进行初始化,需要设置如下几部分:(1)定义波特率一般选内部总线时钟为串行通信的时钟源。
通过设置SCI波特率寄存器SCI0BD的波特率选择位SBR[12:0],来选择合适的分频系数。
(2)写控制字到SCI控制寄存器1(SCI0CR1)设置是否允许SCI、数据长度、输出格式、选择唤醒方法、是否校验等。
(3)写控制字到SCI控制寄存器2(SCI0CR2)设置是否允许发送与接收、是中断接收还是查询接收等。
串行通信程序如下:/** write in “Init.h” **/#include /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */ //void InitBusClk(void); //可以不使用锁相环void InitSci(void);/** write in “Init.c” **///初始化程序#include "Init.h"/*//------------初始化Bus Clock------------//void InitBusClk(void) {DisableInterrupts;CLKSEL=0X00; //PLLSEL 1 : Bus Clock=PLLCLK/2// 0 : Bus Clock=OSCCLK/2PLLCTL_PLLON=1; //开启PLLSYNR=0; //OSCCLK=16MHzREFDV=0X0F;//PLLCLK=2*OSCCLK*[(1+SYNR)/(1+REFDV]=32/16=2MHz while(!(CRGFLG_LOCK==1)); //直到LOCK=1,when PLL is ready,退出循环CLKSEL_PLLSEL=1; //PLLSEL 1 : Bus Clock=PLLCLK/2=2MHz/2=1MHz// 0 : Bus Clock=OSCCLK/2=16M/2=8MHz}*///---------------初始化SCI---------------//void InitSci(void){SCI0BD=4545; //设波特率为110//SCI baud rate = SCI module clock/(16*SCIBD)=Bus Clock/(16*SCIBD)// = 8MHz/(16*4545)=500kHz/4545=110bps//SCIBD : SBR12-SBR0,Value from 1 to 8191SCI0CR1=0;SCI0CR2=0X2C; // 0010 1100 RIE=1,TE=1,RE=1// RIE=1 RDRF and OR interrupt requests enabled// TE=1 Transmitter enabled// RE=1 Receiver enabled}/** write in “SCI.h” **///函数声明unsigned char SciRead();void SciWrite(byte);/** write in “SCI.c” **///串行通信程序#include "Init.h"#include "SCI.h"//---------------读SCI数据---------------//unsigned char SciRead(){if(SCI0SR1_RDRF==1){//数据从移位寄存器传送到SCI数据寄存器SCIDRL//SCI0SR1_RDRF==1表明数据寄存器SCI0DRL为满,可以接收新的数据SCI0SR1_RDRF=1; //读取SCI数据寄存器会将RDRF清除,重新置位return SCI0DRL; //返回数据寄存器的数值}}//---------------写SCI数据---------------//void SciWrite(byte sci_value){while(!(SCI0SR1&0X80));//SCI0SR1_TDRE==1表明数据寄存器SCI0DRL为空,可以发送新的数据SCI0DRH=0;SCI0DRL=sci_value; //发送新的数据至数据寄存器SCI0DR}//---------------中断程序-----------------//#pragma CODE_SEG NON_BANKEDinterrupt 20 void Sci_Intrrupt(void){ //SCI的中断向量号为20 byte text;DisableInterrupts; //关中断text=SciRead(); //接收数据寄存器SCI0DRL中的数据asm nop;asm nop;SciWrite(text); //发送数据至数据寄存器SCI0DRLDDRA=0XFF; //设A口为输出,用来显示是否执行中断,可以不用PORTA_PA6=!PORTA_PA6;EnableInterrupts; //开中断}#pragma CODE_SEG DEFAULT/** write in “main.c”” **/#include "Init.h"#include "SCI.h"void main(void) {/* put your own code here */_DISABLE_COP(); //关看门狗DisableInterrupts; //关中断//InitBusClk();InitSci();EnableInterrupts; //开中断for(;;) {// _FEED_COP(); /* feeds the dog */} /* loop forever *//* please make sure that you never leave main */}A/D转换应用实例要让ATD 开始转换工作,必须经过以下三个步骤:1.将ADPU 置1,使ATD 启动;2.按照要求对转换位数、扫描方式、采样时间、时钟频率及标志检查等方式进行设置;3.发出启动命令;如果上电默认状态即能满足工作要求,那么只要将ADPU 置1,然后通过控制寄存器发出转换命令,即可实现转换。
飞思卡尔MC9S12XS128PLL初始化

01 2<=f(ref)<=6
10 6<=f(ref)<=12
11 f(ref)>12
Bit[5:0] REFDV[5:0] 确定公式中REFDV的值
*/
*/
SYNR=0xc0|0x (04) ;//此处根据需要设置
/*时钟参考分频寄存器(REFDV) Bit[7:6] REFFRQ1 REFFRQ0(用于配置PLL内部滤波器以获得频率最佳稳定性并锁定)
REFFRQ[1: 0] REFCLK频率范围 MHz
{
;
}
CLKSEL_PLLSEL=1; //使能锁相环时钟
}
POSTDIV!=0 f(pll)=f(vco)/(2*POSTDIV)
*/
POSTDIV=0x00; //VCO_clock=PLL_clock
_asm(nop); //短暂延时等待时钟频率稳定
_asm(nop);
while(!(CRGFLG_LOCK==1)) //时钟频率已稳定,锁相环时钟锁定
// =1; 系统时钟由PLLCLK(锁相环时钟)分频f(bus)=f(pll)/2
PLLCTL_PLLON=1; //锁相环启动
///******************************************************//
// f(vco)=2*f(osc)*(SYNDIV+1)/(REFDIV+1)
///******************************************************//
/*CRG时钟合成寄存器(SYNR) Bit[7:6] VCOFRQ1 VCOFRQ0 (用于确定压控振荡器VCO的增益以获得频率最佳稳定性并锁定)
飞思卡尔单片机MC9s12xs128调试PS2

========================PS2.h=====================================#ifndef _PS2_H#define _PS2_H#define PS2_CLK PTJ_PTJ1#define PS2_RW PORTA_PA1typedef struct PS2_V alueType {char PS2_V alueData; /* 码表Num :77 /:E04A*:7C -:7B7: 6C 8:75 9:7D +:794: 6B 5:73 6:74 +:791: 69 2:72 3:7A Enter:E05A0: 70 .:71*//* 对应返回值Num :-5 /:-4 *:7C -:-27: 7 8:8 9:9 +:-14: 4 5:5 6:6 +:-11: 1 2:2 3:3 Enter:100: 0 .:-3 空格-6*/unsigned char PS2_V alueKind; //0 按下,1松手}PS2_V alueType;#endif _PS2_H======================================PS2.c============================ #include "PS2.h"#include "MC9S12XS128.h"//extern unsigned char PS2_Buffer[3];//extern unsigned char PS2_StopCodeFlag=0;//从PS/2中获取一个按键unsigned char PS2_GetData(void){unsigned char temp,i,res;for(i=0;i<11;i++) {while(PS2_CLK);if(i>0 && i<9) {res=res>>1;if(PS2_RW) {res=res|0x80;}}while (!PS2_CLK);}return res;}void Key_Interrupt(void) {//DDRJ=0X00;PIEJ_PIEJ1=1;PPSJ_PPSJ1=0;}void PS2_InsertBuffer(unsigned char *buffer,unsigned char bufferdata) {unsigned char *tempdata=buffer+1;(*buffer++)=(*tempdata++);(*buffer++)=(*buffer++);(*buffer)=bufferdata;}void PS2_GetChar(PS2_V alueType *PS2_V alue){unsigned char temp;temp=PS2_GetData();(*PS2_V alue).PS2_V alueKind=0;if(temp!=0xe0 && temp!=0xf0){switch (temp){/* 对应返回值Num :-6 /:-4 *:-5 -:-27: 7 8:8 9:9 +:-14: 4 5:5 6:6 +:-11: 1 2:2 3:3 Enter:100: 0 .:-3*/case 0x70 : (*PS2_V alue).PS2_V alueData=0; return;case 0x69 : (*PS2_V alue).PS2_V alueData=1; return;case 0x72 : (*PS2_V alue).PS2_V alueData=2; return;case 0x7A : (*PS2_V alue).PS2_V alueData=3; return;case 0x6B : (*PS2_V alue).PS2_V alueData=4; return;case 0x73 : (*PS2_V alue).PS2_V alueData=5; return;case 0x74 : (*PS2_V alue).PS2_V alueData=6; return;case 0x6C : (*PS2_V alue).PS2_V alueData=7; return;case 0x75 : (*PS2_V alue).PS2_V alueData=8; return;case 0x7D : (*PS2_V alue).PS2_V alueData=9; return;case 0x71 : (*PS2_V alue).PS2_V alueData=-3; return;case 0x79 : (*PS2_V alue).PS2_V alueData=-1; return;case 0x7B : (*PS2_V alue).PS2_V alueData=-2; return;case 0x7C : (*PS2_V alue).PS2_V alueData=-5; return;case 0x77 : (*PS2_V alue).PS2_V alueData=-6; return;case 0x66 : (*PS2_V alue).PS2_V alueData=-7; return;}}else if(temp==0xe0){temp=PS2_GetData();if(temp==0xf0){temp=PS2_GetData();(*PS2_V alue).PS2_V alueKind=1;if(temp==0x5A){(*PS2_V alue).PS2_V alueData=10; return;}else if(temp==0x4A){(*PS2_V alue).PS2_V alueData=-4; return;}}else{(*PS2_V alue).PS2_V alueKind=0;if(temp==0x5A){(*PS2_V alue).PS2_V alueData=10; return;}else if(temp==0x4A){(*PS2_V alue).PS2_V alueData=-4; return;}}}else if (temp==0xf0){(*PS2_V alue).PS2_V alueKind=1;temp=PS2_GetData();switch (temp){/* 对应返回值Num :-6 /:-4 *:-5 -:-27: 7 8:8 9:9 +:-14: 4 5:5 6:6 +:-11: 1 2:2 3:3 Enter:100: 0 .:-3 空格-7*/case 0x70 : (*PS2_V alue).PS2_V alueData=0; return;case 0x69 : (*PS2_V alue).PS2_V alueData=1; return;case 0x72 : (*PS2_V alue).PS2_V alueData=2; return;case 0x7A : (*PS2_V alue).PS2_V alueData=3; return;case 0x6B : (*PS2_V alue).PS2_V alueData=4; return;case 0x73 : (*PS2_V alue).PS2_V alueData=5; return;case 0x74 : (*PS2_V alue).PS2_V alueData=6; return;case 0x6C : (*PS2_V alue).PS2_V alueData=7; return;case 0x75 : (*PS2_V alue).PS2_V alueData=8; return;case 0x7D : (*PS2_V alue).PS2_V alueData=9; return;case 0x71 : (*PS2_V alue).PS2_V alueData=-3; return;case 0x79 : (*PS2_V alue).PS2_V alueData=-1; return;case 0x7B : (*PS2_V alue).PS2_V alueData=-2; return;case 0x7C : (*PS2_V alue).PS2_V alueData=-5; return;case 0x77 : (*PS2_V alue).PS2_V alueData=-6; return;case 0x66 : (*PS2_V alue).PS2_V alueData=-7; return;}}}。
飞思卡尔MC9S12XS128单片机中断优先级设置简易教程
本教程试图用最少的时间教你飞思卡尔XS128单片机的中断优先级设置方法和中断嵌套的使用,如果是新手请先学习中断的基本使用方法。
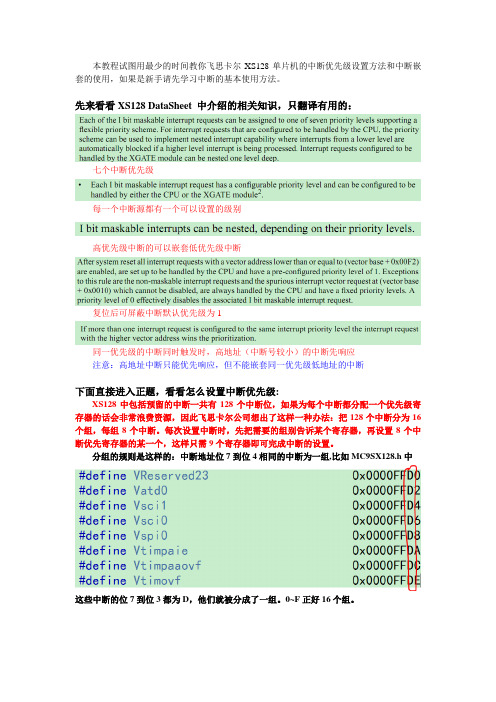
先来看看XS128 DataSheet 中介绍的相关知识,只翻译有用的:七个中断优先级每一个中断源都有一个可以设置的级别高优先级中断的可以嵌套低优先级中断复位后可屏蔽中断默认优先级为1同一优先级的中断同时触发时,高地址(中断号较小)的中断先响应注意:高地址中断只能优先响应,但不能嵌套同一优先级低地址的中断下面直接进入正题,看看怎么设置中断优先级:XS128中包括预留的中断一共有128个中断位,如果为每个中断都分配一个优先级寄存器的话会非常浪费资源,因此飞思卡尔公司想出了这样一种办法:把128个中断分为16个组,每组8个中断。
每次设置中断时,先把需要的组别告诉某个寄存器,再设置8个中断优先寄存器的某一个,这样只需9个寄存器即可完成中断的设置。
分组的规则是这样的:中断地址位7到位4相同的中断为一组,比如MC9SX128.h中这些中断的位7到位3都为D,他们就被分成了一组。
0~F正好16个组。
INT_CFADDR就是上面说到的用来设置组别的寄存器:我们需要设置某个组别的中断时,只要写入最后8位地址就行了,比如设置SCI0的中断优先级,就写入0xD0。
设置好组别之后,我们就要该组中相应的中断进行设置,设置中断的寄存器为这其实是一组寄存器,一共有8个,每个都代表中断组中的一个中断。
对应规则是这样的:中断地址的低四位除以2比如还是SCI0,低四位是6,除以二就是3,那么我们就需要设置INT_CFDATA3 往INT_CFDATAx中写入0~7就能设置相应的中断优先级了拿我本次比赛的程序来举个例子:我们的程序中需要3个中断:PIT0,PORTH,SCI0。
PIT0定时检测传感器数值,PORTH连接干簧管进行起跑线检测,SCI0接收上位机指令实现急停等功能。
因此中断优先级要SCI0>PORTH>PIT0。
飞思卡尔智能车-XS128芯片中文资料
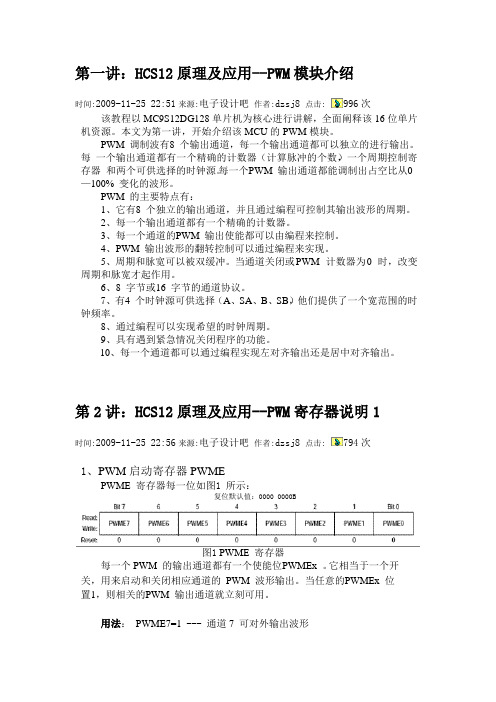
第一讲:HCS12原理及应用--PWM模块介绍时间:2009-11-25 22:51来源:电子设计吧作者:dzsj8 点击:996次该教程以MC9S12DG128单片机为核心进行讲解,全面阐释该16位单片机资源。
本文为第一讲,开始介绍该MCU的PWM模块。
PWM 调制波有8个输出通道,每一个输出通道都可以独立的进行输出。
每一个输出通道都有一个精确的计数器(计算脉冲的个数),一个周期控制寄存器和两个可供选择的时钟源。
每一个P WM 输出通道都能调制出占空比从0—100% 变化的波形。
PWM 的主要特点有:1、它有8个独立的输出通道,并且通过编程可控制其输出波形的周期。
2、每一个输出通道都有一个精确的计数器。
3、每一个通道的P WM 输出使能都可以由编程来控制。
4、PWM 输出波形的翻转控制可以通过编程来实现。
5、周期和脉宽可以被双缓冲。
当通道关闭或PWM 计数器为0时,改变周期和脉宽才起作用。
6、8 字节或16 字节的通道协议。
7、有4个时钟源可供选择(A、SA、B、SB),他们提供了一个宽范围的时钟频率。
8、通过编程可以实现希望的时钟周期。
9、具有遇到紧急情况关闭程序的功能。
10、每一个通道都可以通过编程实现左对齐输出还是居中对齐输出。
第2讲:HCS12原理及应用--PWM寄存器说明1时间:2009-11-25 22:56来源:电子设计吧作者:dzsj8 点击:794次1、PWM启动寄存器PWMEPWME 寄存器每一位如图1所示:复位默认值:0000 0000B图1 PWME 寄存器每一个PWM 的输出通道都有一个使能位P WMEx 。
它相当于一个开关,用来启动和关闭相应通道的PWM 波形输出。
当任意的P WMEx 位置1,则相关的P WM 输出通道就立刻可用。
用法:PWME7=1 --- 通道7 可对外输出波形PWME7=0 --- 通道7 不能对外输出波形注意:在通道使能后所输出的第一个波形可能是不规则的。
飞思卡尔智能车S12XS128PWM控制程序编写
飞思卡尔智能车S12XS128PWM控制程序编写SeptStringS原创,转载请注明。
对于飞思卡尔智能车,电机和舵机的控制通常使⽤的都是以PWM脉冲宽度调制的⽅法实现的,其可⾏性基于电机可以由占空⽐控制转速,⽽舵机也由脉宽控制摆动。
PWM 调制波有 8 个输出通道,每⼀个输出通道都可以独⽴的进⾏输出。
每⼀个输出通道都有⼀个精确的计数器(计算脉冲的个数),⼀个周期控制寄存器和两个可供选择的时钟源。
每⼀个 PWM 输出通道都能调制出占空⽐从 0—100% 变化的波形。
PWM控制程序的编写⼀般按照以下的⼀种流程:1,禁⽌PWM模块;//这是由于改变周期和脉宽等操作需要在PWM禁⽌的情况下才能被设置2,PWM级联选择,是否级联通道67,45,23,01;//最多单独使⽤8个8位和级联使⽤4个16位3,给通道选择时钟源控制位;//0,1,4,5通道可选择ClockA和ClockSA;2,3,6,7通道可选择ClockB和ClockSB4,给时钟源A\B预分频;//可对总线时钟进⾏预分频,确定ClockA和ClockB,满⾜1,2,4,8,16,32,64,128这8个分频量5,根据时钟源A\B确定时钟源SA\SB;//由ClockA和ClockB、分频设值来确定ClockA和ClockB,满⾜1-255的分频量6,输出极性的选择;//也就是选择输出极性先低后⾼还是先⾼后低7,对齐⽅式的选择;//可设置为左对齐或者中间对齐⽅式8,实际通道频率的计算;//也就是周期的设定9,占空⽐寄存器的设置;//占空⽐常数的设定,可以以此决定占空⽐10,使能PWM模块。
//你已经⾸尾呼应了,有⽊有接下来通过寄存器的介绍,以上⾯流程为⼤纲,详细地说明⼀下该如何操作~~【PWME】寄存器PWME = (PWME~7 | PWME~6 | PWME~5 | PWME~4 | PWME~3 | PWME~2 | PWME~1 | PWME~0)将每⼀位设置为1即可使能该位,0对应的既是禁⽌。
飞思卡尔智能车 XS128 PE编程入门教程
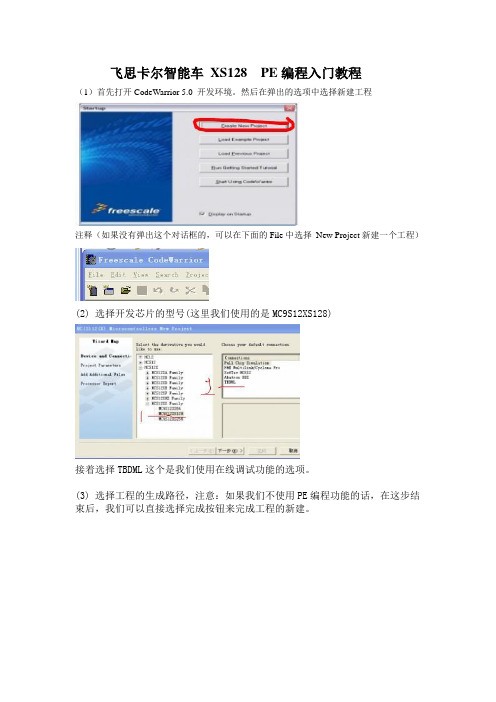
飞思卡尔智能车XS128 PE编程入门教程(1)首先打开CodeWarrior 5.0 开发环境。
然后在弹出的选项中选择新建工程注释(如果没有弹出这个对话框的,可以在下面的File中选择New Project新建一个工程)(2) 选择开发芯片的型号(这里我们使用的是MC9S12XS128)接着选择TBDML这个是我们使用在线调试功能的选项。
(3) 选择工程的生成路径,注意:如果我们不使用PE编程功能的话,在这步结束后,我们可以直接选择完成按钮来完成工程的新建。
(4) (PE编程功能的步骤)下一步,这个对话框我们什么都不用选择,直接点击下一步。
(5)选择下面这个选项来启动PE编程功能。
(6) 红色边框中的选项的功能为是否启动浮点数据的使用,默认第一个是不启用,第二个是启用,float数据为32位。
double为32位,第三个是启用,float 数据为32位,double数据为64位。
(7)最后一步什么都不要设置,直接点击完成。
(8) 以上步骤我们完成了一个XS128工程的新建步骤。
PE的使用步骤:(1) 新建工程后,会自动弹出个芯片封装型号的选择,选择好后点击OK。
(注意:我们学校有些芯片是80管脚的,也有112管脚的,所以注意选择红线标注的选项)(2) 点击OK后,就会出现我们要编程的环境了。
如下(3)红色标注的地方就是我们该工程的工作区了。
细心的同学就会发现,它生成的文件中没有我们需要写的源文件XXX.c 。
那我们现在就来生成这些文件。
找到下图的按键Processor Expert。
然后点击第二个选项的Generate Code ' XXXX .mcp' (这里的XXXX表示该工程名称).下面是自动生成的文件。
这时候我们发现软件为我们自动的生成了一个Project.c(Project 是我这个工程建立的文件命,不同的工程文件名将导致这个名字不同)的文件。
这个就是我们将要编写的源文件了,它里面包含了我们的主函数main()。
MC9S12XS128万能初始化函数
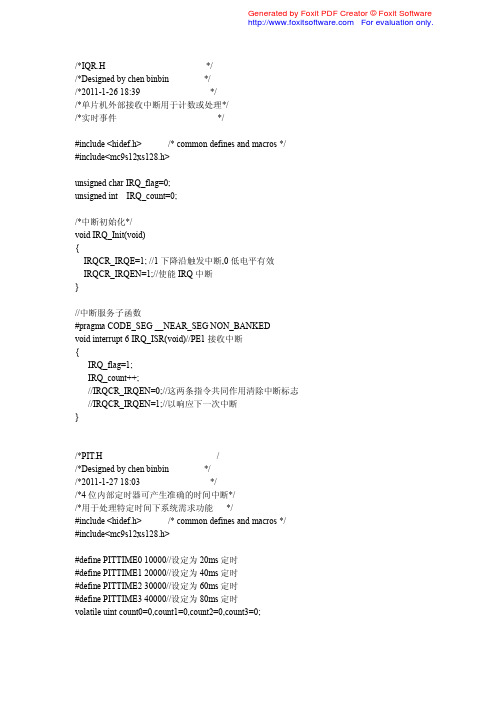
/*IQR.H *//*Designed by chen binbin *//*2011-1-26 18:39 *//*单片机外部接收中断用于计数或处理*//*实时事件*/#include <hidef.h> /* common defines and macros */ #include<mc9s12xs128.h>unsigned char IRQ_flag=0;unsigned int IRQ_count=0;/*中断初始化*/void IRQ_Init(void){IRQCR_IRQE=1; //1下降沿触发中断,0低电平有效IRQCR_IRQEN=1;//使能IRQ中断}//中断服务子函数#pragma CODE_SEG __NEAR_SEG NON_BANKEDvoid interrupt 6 IRQ_ISR(void)//PE1接收中断{IRQ_flag=1;IRQ_count++;//IRQCR_IRQEN=0;//这两条指令共同作用清除中断标志//IRQCR_IRQEN=1;//以响应下一次中断}/*PIT.H //*Designed by chen binbin *//*2011-1-27 18:03 *//*4位内部定时器可产生准确的时间中断*//*用于处理特定时间下系统需求功能*/#include <hidef.h> /* common defines and macros */ #include<mc9s12xs128.h>#define PITTIME0 10000//设定为20ms定时#define PITTIME1 20000//设定为40ms定时#define PITTIME2 30000//设定为60ms定时#define PITTIME3 40000//设定为80ms定时volatile uint count0=0,count1=0,count2=0,count3=0;//定时器初始化void PIT_Init(void)//定时中断初始化函数{//通道0初始化,20ms定时中断设置//PITCFLMT_PITE=0; //定时中断通道关,4个通道均关闭PITCE_PCE0=1;//定时器通道0使能PITMUX_PMUX0=0;//0:8位定时器0与16位定时器共同作用,需设定PITMTLD0初值//1:8位定时器1与16位定时器共同作用,需设定PITMTLD1初值PITMTLD0=160-1;//8位定时器0初值设定,80MHzBusClock下为1us,设定一次即可//PITMTLD1=160-1;//8位定时器1初值设定,80MHzBusClock下为2us,设定一次即可PITLD0=PITTIME0-1;//16位定时器初值设定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f(bus)=f(osc)/2
//
=1; 系统时钟由 PLLCLK(锁相环时钟)分频
f(bus)=f(pll)/2 PLLCTL_PLLON=1;
//锁相环启动
///******************************************************//
// f(vco)=2*f(osc)*(SYNDIV+1)/(REFDIV+1)
// f(vco)=2*f(osc)*(SYNDIV+1)/(REFDIV+1)
///******************************************************//
/*CRG 时钟合成寄存器(SYNR) Bit[7:6] VCOFRQ1 VCOFRQ0 (用于确定压控振荡器
Bit[5:0]
REFDV[5:0] 确定公式中 REFDV 的值
*/ REFDV=0x80|0x (01);//此处根据需要设置
/*时钟后分频寄存器 (POSTDIV) 确定 VCOVLK 频率和 f(vco)和 PLLCLK 频率 f(pll)之间的
比率
POSTDIV=0x00; f(pll)=f(vco)
注释不详细
/*********************************************************/ 函数名称:void ATD0_init(void) 函数功能:ATD 初始化 入口参数:
出口参数:
/***********************************************************/
通道使能位。 若 PCE 位清 0,则禁用 PIT 通道 PITTF 寄存器中的相应标志位清 0
//
若 PCE 位置 1,且 PITE=1,则 16 位定时计数器将
装载初始计数值 ,初始值开始向下递减计数。
PITMUX=0x00;//定时器通道 0 使用了微定时基准 0(Base Timer 0)|=1 使用了微定时基 准 1;有效位 Bit[3:0] PMUX[3:0]定时器 3,2,1,0 通道的复用选择位,确定相应
PFLMT=1,相应的 8 位微定时器的装载寄存器值将立即装载到 8 位微定
//
时器的递减计数器。写 0 操作无效;读取
这两位总是返回 0
//
注:强制装载微定时器值会影响到使用该微定时基准的所有定时
器通道
PITCE_PCE0=1; //使能定时器通道 0|=0 禁用; Bit[3:0] PCE[3:0] PIT 定时器 3,2,1,0
{
CLKSEL_PLLSEL=0; //不使能锁相环时钟 =0;系统时钟由 OSCCLK(外部晶振)分频
f(bus)=f(osc)/2
//
=1; 系统时钟由 PLLCLK(锁相环时钟)分频
f(bus)=f(pll)/2
PLLCTL_PLLON=1;
//锁相环启动
///******************************************************//
VCO 的增益以获得频率最佳稳定性并锁定)
VCOFRQ[1:0]
VCOCLK 频率范围 MHz
00
32<=f(vco)<=48
01
48<=f(vco)<=80
10
保留
11
80<=f(vco)<=120
Bit[5:0] SYNR[5:0] 确定公式中 SYNDIV 的值 */ SYNR=0xc0|0x (04) ;//此处根据需要设置
while(!(CRGFLG_LOCK==1)) {
; }
//时钟频率已稳定,锁相环时钟锁定
CLKSEL_PLLSEL=1; //使能锁相环时钟
}
/*********************************************************
函数名称:void PLL_INT(void)
运行| 1 等待模式下,PIT 模块停止产生时钟信号,冻结 PIT 模块
//
Bit[5] PITFRZ: 冻结模式下 PIT 计数器冻结位。冻结模式下,断点调试
时,该位冻结 PIT 计数器,可有效避免中断的发生。
//
冻结模式下 0 PIT 模块正常运行 | 1PIT 模块停止计数
//
Bit[1:0]PFLMT[1:0] PIT 微定时器 1 和 0 强制装载位 。PTE=1 时,
*/ POSTDIV=0x00;
Bit[4:0] POSTDIV[4:0] 用于确定公式中 POSTDIV 的值 POSTDIV!=0 f(pll)=f(vco)/(2*POSTDIV)
//VCO_clock=PLL_clock
_asm(nop); //短暂延时等待时钟频率稳定 _asm(nop);
/*时钟参考分频寄存器(REFDV) Bit[7:6] REFFRQ1 REFFRQ0(用于配置 PLL 内部滤
波器以获得频率最佳稳定性并锁定)
REFFRQ[1: 0]
REFCLK 频率范围 MHz
00
1<ref)<=6
10
6<=f(ref)<=12
11
f(ref)>12
// ATD0CTL5=0x30;
//启动 AD 转换序列
//:对每项数据采集时,用到哪个通道采样可在相应子函数内设置某一通道(见
Sample_AD.c)
}
while(!ATD0STAT2L_CCF0);
/*********************************************************/ 函数名称:void PIT_init(void) 函数功能:初始化 PIT 设置精确定时时间 (1s) 入口参数:无 出口参数:无 说明:无
///******************************************************//
// REF_cloc f(ref)=f(osc)/(REFDIV+1)
///******************************************************//
//
中断。当中断被挂起,该位使能,PIT=1 将会立即产生
中断;为避免该中断发生,必须先清零相应的 PIT 标志位。
PITCFLMT=0x80; //使能 PIT 模块
}
/********************************************************* 函数名称:interrupt VectorNumber_Vpit0 void PIT_ISR(void) 函数功能:PIT 通道 0 中断服务子程序 入口参数: 出口参数: ***********************************************************/
样时间,有助于采样前进行开路检测
ATD0CTL2=0x40;
// 快速清零,禁止中断,禁止外部触发
ATD0CTL3=0x90;
// 右对齐,转换序列长度为 2,非 FIFO
ATD0CTL4=0x03; 期,PRS=31,F(ATDCLK)=F(BUS)/(2(PRS+1))
// 采 样 时 间 4 个 周
//定时周期=(PITMTLD0+1)*(PITLD0+1)*(1/f(BUS))=1s //置 1,重新装载该寄存器 值
PITINTE=0x01; //使能 PIT 定时器通道 0 中断|=0 禁止中断 Bit[3:0] PINTE[3:0] 定时器
3,2,1,0 中断使能位,该位使能,一旦相应 PIT 通道的 PTF(超时标志位)置位,允许相应
void ATD0_init(void)
{ ATD0DIEN=0x00;
//使用模拟输入功能 |=1;数字输入功能
// ATD0CTL0=0x07;
//Bit[3:0]WRAP[3:0] 反转通道选择位
ATD0CTL1=0x40;
// 12 位精度,采样前不放电 Bit[7]ETRIGSEL(外部触发源
///******************************************************//
/*CRG 时钟合成寄存器(SYNR) Bit[7:6] VCOFRQ1 VCOFRQ0 (用于确定压控振荡器
VCO 的增益以获得频率最佳稳定性并锁定)
VCOFRQ[1:0]
VCOCLK 频率范围 MHz
//set Bus clock
函数功能:设置总线频率为( 40 )MHz ,晶振频率为 16MHz
入口参数:无
出口参数:无
***********************************************************/
void PLL_INT (void)
{
CLKSEL_PLLSEL=0; //不使能锁相环时钟 =0;系统时钟由 OSCCLK(外部晶振)分频
函数名称:void PLL_INT(void)
//set Bus clock
函数功能:设置总线频率为( 40 )MHz ,晶振频率为 16MHz
入口参数:无
出口参数:无
***********************************************************/
void PLL_INT (void)
飞思卡尔 MC9S12XS128 各模块初始化程序-超详细注释
//**************************************************************************