NP-100固定翼自驾仪数据手册
APM2.5在固定翼飞机的应用

固定翼首次设置本文由CUAV-BIN编写,有些内容摘自WIKI 看此文章之前,请先了解好如何接线,以及刷好了固定翼固件,如果还不了解,请返回看入门篇。
固定翼设置主要就是分为这么几个步骤:1.校准遥控2.设置飞行模式3.检查舵面反应是否正确4.如果是常见机型,导入官方PID参数联机设置一定不能上动力电池或者螺旋桨,这个非常重要的安全习惯与地面站进行链接首先我们打开MP地面站,并选择好端口,波特率为115200,然后点connect,倒数到25秒后,地面站与飞控就会进行数据通讯链接。
链接上后,我们点firmware选项之后会弹出一个功能框,我们只需要从第一个开始往下做即可1:RADIO calibration遥控器校准校准前,请确保接收机与飞控正确插好。
一般情况,接收机1-4通道接入APM INPUT1-4然后接收机设置一个三段或者2段开关到指定通道,接入APM INPUT8,in8为飞行模式切换通道校准遥控前,需要把油门行程的最小值调整到1100+一点,很重要,可能会导致你的电调无法启动的问题(这个请看遥控说明书,一般都有菜单进行调整)你可以在这个界面波动遥控器摇杆,就会看见对应的通道的绿色条会动,如果对应的数值条正确后,我们开始点校准遥控然后会提示叫你不要连着动力电池和螺旋桨来做校准,以免发生意外,这个是很重要安全习惯我们点OK然后可以看见有红色的线条出现然后我们开始打杆,你会发现绿色的条会推动红色的线条这是由于标示每个通道的最大值和最小值我们只需要把1-4和模式切换开关都往最大最小值打一次正确的数值应该是如下图一样的,最大不超2000,最小值在1100左右确认没错后,我们点然后提示CH1-CH4CH8都有最大值最小值提示,如图才是正确的,然后我们点OK,就会自动保存下面设置飞行模式飞行模式设置切到Flight modes然后拨动设置好的三段开关你会发现会以绿色去选中一个模式而飞行模式6是固定为手动模式,是无法更改的,必须要的如果需要更换为其他模式,只需要点下拉框,然后选中需要的模式,最后点保存即可,新手推荐增稳和RTL模式关于模式的介绍可以看下表模式手动(MANUAL)常规遥控,没有稳定功能。
AST100汽车行车记录仪说明书

AST-100产品说明书1摘要1.1【产品说明】感谢您购买本公司出品的高清行车记录仪,本产品技术领先,外观独特,功能强大。
为了轻松让您体验产品,我们配备了祥细的使用说明,您从中可以获取有关产品的介绍,使用方法等方面的知识,您在开始使用本机之前请仔细阅读说明书,以便您能正确的使用本机。
1.2【基本参数】液晶屏尺寸 2.0寸TFT屏录像分辨率720*480照片分辨率4032*3024视频格式AVI镜头广角 120°存储卡格式TF存储卡(512M-32G),推荐使用高速卡1.3【产品特性】·内建120度超广角镜头 1280*720P(差值) 640*480P画质·汽车发动就自动开机录影,熄火自动关机·内建大萤幕2.0寸TFT,发生行车纠纷时可马上播放影片,不必忙着找电脑读取影片影片画面内嵌日期时间水印,·最大支援32GB SDHC卡,满足长时间录影的需求·可掀式TFT萤幕,可随时关闭萤幕节省电力·夜视功能超级八个灯,射波更远,让你晚上看得更清楚(可设定关闭/开启)·循环录制功能,会自动删除旧档录新档·9国语言:简体、繁体、日语、俄语、英语、韩语、德语、葡萄牙、西班牙1.4【使用说明】首先将车充插入DC5V接口,然后连入车上电源接口进行充电,再将支架扣入顶部支架孔固定在车前挡风玻璃上。
1)产品功能结构图2)按键定义1:SD卡槽 2:喇叭 3: AV接口 4:电源接口5:主按键 6:摄像头 7:夜视灯 8:支架口9:电池指示灯 10:USB接口1.5【供电方式】A)使用内键可充电锂电池充电方式:1)连接车充2)用USB连接电脑。
注:有使用锂电池供电时,需要按电源键启动或关闭DVR録影。
B)连接5V车充汽车启动以后,DVR自动开始录影。
断电后停止工作,并自动保存其前面的档案。
注意:只能使用输出为5V的车充电源。
1.6【功能说明】1、功能介绍DVR带有录影/拍照/播放功能。
NP100(AP101)使用快速入门(含航摄)V1.1

弹射对齐
• 由于弹射架设计、安装问题,飞机俯仰角不为15度时,地面站人员 可采集、设臵当前的俯仰角作为初始状态,采集后升降舵应处于
中立位。
弹射起飞
发动机控制
• 弹射起飞前,由操作手手动控制,启动发动机,发动机状态调整完成 后,油门放臵怠速位,并切自驾;起飞指令下达后,发动机逐步增加
至预设待飞油门。
弹射起飞
起飞流程
航线 设置
飞前 检查
弹射 对齐
启动 发动 机
切换 自驾
下达 起飞 指令
弹射 释放
达到 起飞 空速
爬升 模式
飞行 模式
弹射起飞关键参数
起飞类型 爬升模式时间
• 弹射起飞
待飞油门
• 爬升模式持续的时间
爬升最大油门
• 1(100%)或最大油门
爬升速度系数
• 爬升模式时使用的油门
添加舵面
舵面校准
常见固定翼布局舵面配置 • 飞翼布局 • V尾布局 • 倒V尾布局 左升降副翼、右升降副翼 左方向升降舵、右方向升降舵 左倒V方向升降舵、右倒V方向升降舵
降落伞控制舵机 • 降落伞(停车联动)打开降落伞之前,将首先关闭发动机,再延 时若干秒后开伞。延时时间可配臵。 • 降落伞(停车不联动)打开降落伞时,将不管发动机是否关闭, 直接开伞。
磁罗盘校准
校准方法 • 缓慢、水平、平稳旋转飞机,约一分钟一圈。
自驾仪安装基本流程
自驾 仪位 置安 装设 置
天线 安装 设置
动静 压传 感器 安装 检查
AD接 口连 接
IO接 口配 置
遥控 器校 准检 查
舵机 舵面 配置 检查
磁罗 盘校 准
控制 器参 数配 置
APM全部参数表
ARSPD_RATIO ARSPD_SKIP_CAL
1.9936 0
ARSPD_TUBE_ORDE R
2
ARSPD_USE
0
AUTO_FBW_STEER
0
0:禁用 1:启用
AUTOTUNE_LEVEL BATT_AMP_OFFSET BATT_AMP_PERVOL T BATT_CAPACITY BATT_CURR_PIN BATT_MONITOR BATT_VOLT_MULT
603362704.doc
第 4 页 共 35 页
ARSPD_PIN
0
空速计连接到的模拟 IO 口. 设置这个参数为 0-9 来对应 APM2 的模拟 引脚. 使用 APM1 时设置为 64,对应于板子末端的空速计接口. 使用 PX4 时设为 11,对应于模拟空速计接口. 使用 Pixhawk 时设为 15, 对应于模拟空速计接口. 使用 EagleTree 或 MEAS I2C 空速计的 PX4 或者 Pixhawk,设置为 65. 空速计校准后的比率 这个参数允许你在皮托管里的连接顺序有影响时选择. 如果设置为 0 则顶部连接的传感器是动态压强. 如果设置为 1 则底部连接的传感 器是动态压强. 若设为 2(默认)则空速管驱动器将会接受任意一种 顺序.你可能想要指定顺序的原因在于它能够使你的空速计检测飞行 器是不是受到了过大的静压强,而这可能被解读成正空速. 1:使用 0:不使用 使用空速数据进行飞行控制 开启此项将使得在自动模式中可以使用 FBWA 的方式进行操控. 这可 以用来执行带有航点逻辑的人工增稳飞行,或可用于载荷[译注:即 飞的时候知道航点,一个个航点飞过去]. 启用后飞行员拥有和 FBWA 模式中一样的操控, 但普通的自动模式导航被完全禁用. 寻常情况 不推荐这个选项. 自动调参的激烈程度. 在较低等级的 AUTOTUNE_LEVEL 上自动调参较 为柔和, 增益较小. 对于大多数用户而言推荐 5 级. 在 0 电流情况下传感器的电压读数偏移值 当电流传感器读数为 1V 时转换得到的电流值. 对于使用 3DR 电源模 块的 APM2 或者 Pixhwak 这个值必须为 17. 对于使用 3DR 四合一电调 的 Pixhawk 这个值必须为 17. 满电电池的容量,以 mAh 计 -1:禁 用 1:A1 12:A12 2:A2 3:Pixhawk 101:PX4 设置这个参数为 0 至 13 将指定电池电流传感器的管脚对应于 A0 至 A13. 对于 APM2.5 的电源模块,这个值必须为 12. 在 PX4 上这个值 必须为 101. 对于使用电源模块的 Pixhawk 这个值必须为 3. 控制电池电流或电压监控 用来将电压传感器管脚检测到的电压值(BATT_VOLT_PIN)转换成实际 电压值(管脚电压*VOLT_MULT). 对于 APM2 或者 Pixhawk 的 3DR 电源
N300用户手册增加
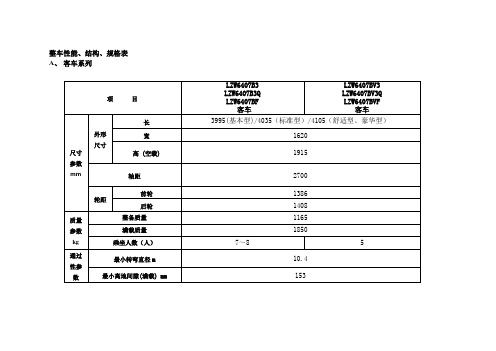
整车性能、结构、规格表A、客车系列倒车雷达(如装备)使用提示当变速杆挂入倒车档“R”时,此时系统进入自检状态:若两组传感器功能正常,则蜂鸣器发出“哔!”的一声。
若任一组传感器功能异常,则蜂鸣器发出“哔!哔!”的二声短音。
若两组传感器功能异常,则蜂鸣器发出“哔!哔!哔!”的三声短音。
正常状态下,在距离障碍物120cm 以上时,倒车蜂鸣器不应发出“哔!”的声音。
当你在倒车时听到“哔!”“哔!”“哔!”的长间歇警告音时,表示您车后传感器距离的障碍物已经进入120cm的范围内。
当你在倒车时听到“哔!”“哔!”“哔!”的短间歇警告音时,表示您车后传感器距离的障碍物已经进入90cm的范围内。
当你在倒车时听到“哔!”“哔!”“哔!”的急促间歇警告音时,表示您车后传感器距离的障碍物已经进入60cm 的范围内。
当你在倒车时听到“哔!”“哔!”“哔!”的长鸣警告音时,表示您车后传感器距离的障碍物已经进入40cm的范围内。
注:在长鸣区(0~40cm)内有障碍物时倒车,会导致测试距离不准确。
当障碍物进入40cm后,再退出60cm之前钥匙和遥控器( 如装备)钥匙有两把钥匙,用于点火和打开所有车门。
请将备用钥匙保存在汽车以外的安全地方, 以防车辆被盗。
遥控器( 如装备)您的汽车如果配备了遥控器,关于遥控器的使用请参见" 中控锁系统"。
请妥善保管您的遥控钥匙(两个)。
1. 遥控开(UNLOCK ): 。
2. 遥控关(LOCK ): 。
更换遥控器电池1. 用一把小十字起将遥控器表面的螺钉拧开,然后轻轻地将前体和后盖分开。
2. 小心将电池由遥控器中取出。
切勿用硬金属件将电池猛力撬出。
3. 更换电池。
4. 重装遥控器,确保前体和后盖结合紧密,以免进水。
5. 检查遥控器的操作。
OM2618中控锁系统( 如装备)中控锁是由驾驶员侧车门来控制的。
当驾驶员侧车门用钥匙或车门门锁钮来上锁或开锁时,所有车门都会同时被上锁或开锁。
彩途N100,N200,n300,N400,N600使用说明书

2.8 子菜单......................................................... 5 2.9 数据区......................................................... 6
3.3 航线与导航 ............................................... 18
3.3.1 创建航线 ....................................... 18 3.3.2 编辑航线 ....................................... 19 3.3.3 删除航线 ....................................... 20 3.3.4 航线导航 ....................................... 21 3.3.5 航线子菜单.................................... 23
4、使用配套的附件 请使用规定型号的电池,使用错误型号的电
池会对仪器造成伤害并可能发生爆炸;务必按照 说明处置用完的电池;只能使用配套的电缆和天 线,非配套的电缆和天线会严重降低性能并损坏 接收机,且无法得到保修。
5、许可协议 未经北京华辰北斗信息技术有限公司的书
面许可,任何人均不得以任何目的,任何方式复 制、翻版或传送此手册。
3.5 地图与查找 ............................................... 30
10C中文说明书_固定翼部分

10C中文说明书_固定翼部分目录简介 (1)销售及使用区域的限定 (2)使用、出口和改装 (2)特殊标志的意义 (2)安全飞行 (3)对10C/10CG系统的简介 (4)部件和技术特性 (7)配件 (9)发射机控制项和开关设置 (12)对镍镉电池充电 (16)操纵杆松紧度调整 (17)调整显示屏的对比度 (17)改变模式(TX SETTING) (18)省电模式 (18)CAMPac卡的初始化方法和数据转换(T9C/T9CS 到T10C): (18) 遥控设备的安装和距离检测 (19)飞行频率 (23)发射机显示屏&按键 (24)警告和错误显示 (25)固定翼机(ACRO)的功能菜单 (26)ACRO基本功能导览 (27)设置4通道固定翼的快速向导: (28)固定翼机(ACRO)的基础功能菜单 (30)MODEL子菜单 (30)参数(PARAMETER)子菜单 (33)逻辑开关选择( LQGIC SW) (38)舵机反转(SRRVO REVERSING) (38)舵机行程量的调整( END FOINT/EPA): (39) 发动机怠速控制管理 (40)双/三重比率和感度指数(D/R,EXP) (42)计时器(TIMER)菜单: (45)辅助通道功能AUX-CH: (46)教练功能TRAINER (46)微调TRIM和中立微调SUB-TRIM (48)舵机(SERVO)显示 (49)失控保护和电池低电量失控保护(F/S) (49) 固定翼机(ACRO)高级功能菜单: (50)机翼类型(固定翼机/滑翔机ACRO/GLID): (51) 襟副翼混控FLAPERON (52)襟翼—微调FLAP TRIM (53)副翼差动A1L-DIFF (54)使用5通道接收机的双副翼舵机 (54)尾翼类型 (55)升降舵副翼混控ELEVON (55)V型尾翼(V-TAIL) (57)快速横滚SNAP-ROLL (58)混控MIXS定义和类型 (59)升降舵-襟翼混控ELEV-FLAP (60)空气刹车AIRBRAKE/BUTTERFL Y(crow) (61) 油针混控THROTTLE-NEEDLE (62)油门延迟功能THR-DELAY (64)油门曲线THR-CURVE (64)线性编程混控LINER (65)曲线编程混控CURVE (67)GY A型陀螺仪混控(陀螺仪感度) (69)其它设备 (70)简介感谢您购买Futaba○R10C/10CG系列数字比例无线电遥控设备(FASST-2.4GHz*或PCM1024系统)。
PIX说明书V1.4.1

Pixhawk多轴使用说明书(V1.4.1)乐迪Pixhawk飞控四轴(ArduCopter)版本信息介绍 V1版本:完善基本操作说明V1.1版本:添加失控保护介绍V1.3版本:添加日志,EKF失控保护的介绍V1.4版本:飞行模式和解锁故障保护的详细介绍 V1.4.1版本:完善电流计设置简介非常感谢您购买深圳市乐迪电子有限公司生产的pixhawk飞控。
Pixhawk自动驾驶仪(简称pix)是一款非常优秀而且完全开源的自动驾驶控制器,他的前世就是大名鼎鼎的APM,由于APM的处理器已经接近满负荷,没有办法满足更复杂的运算处理,所以硬件厂商采用了目前最新标准的32位ARM处理器,第一代产品是PX4系列,他分为飞控处理器PX4FMU和输入输出接口板PX4IO。
PX4系列可以单独使用PX4FMU(但是接线很复杂),也可以配合输入输出接口板PX4IO来使用,但是因为没有统一的外壳,不好固定,再加上使用复杂,所以基本上属于一代实验版本。
通过PX4系列的经验,厂商终于简化了结构,把PX4FMU和PX4IO整合到一块板子上,并加上了骨头形状的外壳,优化了硬件和走线,也就是这款第二代产品Pixhawk。
可应用于固定翼、直升机、多旋翼、地面车辆等,建议:在您阅读本说明书时,边阅读边操作。
您在阅读这些说明时, 如遇到困难请查阅本说明书或致电我们售后( 0755-******** ) 及登陆航模类论坛( 如:/forum.php?mod=forumdisplay&fid=277泡泡老师教程,, 航模吧,乐迪微信公众平台,乐迪官方群:334960324)查看相关问题问答。
乐迪微信公众平台 乐迪官方群售后服务条款1,本条款仅适用于深圳市乐迪电子有限公司所生产的产品,乐迪通过其授权经销商销售的产品亦适用本条款。
2,乐迪产品自购买之日起,一周内经我司核实为质量问题,由乐迪承担返修产品的往返快递费,购买乐迪产品超过一周到一年内经我司核实为质量问题,用户和乐迪各自承担寄出返修产品的快递费。
APM全部参数表
6
0 10
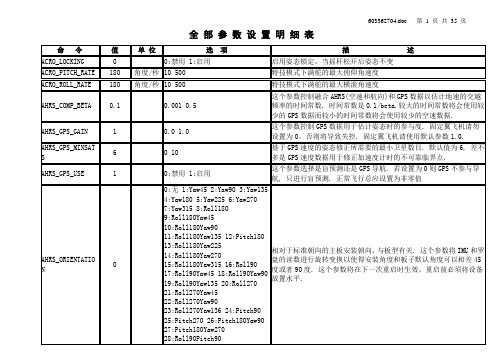
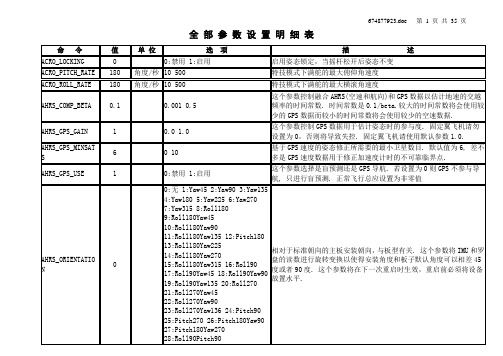
基于GPS速度的姿态修正所需要的最小卫星数目. 默认值为6, 差不多是GPS速度数据用于修正加速度计时的不可靠临界点.
AHRS_GPS_USE
1
0:禁用 1:启用
这个参数选择是盲预测还是GPS导航. 若设置为0则GPS不参与导航, 只进行盲预测. 正常飞行总应设置为非零值
ARSPD_AUTOCAL
0
如果启用这项,APM会在飞行时基于一个使用地速和实际空速的估计滤波器自动调整ARSPD_RATIO. 如果比率值变化超过5%,自动校准会将新的比率值每隔2分钟存入EEPROM
ARSPD_ENABLE
0
0:禁用 1:启用
开启空速计
ARSPD_FBW_MLT_MIX
1
百分比
0 1
GPS高度和气压计高度的混合比率. 0 = 100% GPS, 1 = 100% 气压计. 强烈建议你不要改动默认值1, 因为GPS高度数据是出了名地不可靠. 只有一种情况下我们建议你修改这个值,就是当你拥有一个高空开启的GPS, 例如你在离地几千米的地方从气球上抛下一个飞机时.
BATT_CAPACITY
3300
毫安时
满电电池的容量,以mAh计
BATT_CURR_PIN
12
-1:禁用 1:A1 2:A2 3:Pixhawk 12:A12 101:PX4
设置这个参数为0至13将指定电池电流传感器的管脚对应于A0至A13. 对于APM2.5的电源模块,这个值必须为12. 在PX4上这个值必须为101. 对于使用电源模块的Pixhawk这个值必须为3.
BATT_MONITOR
3
0:禁用 3:仅电压 4:电压和电流
APM中文使用手册Word版
一、介绍ArduPilotMega 自动驾驶仪(简称APM 自驾仪)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于固定翼、直升机、多旋翼、地面车辆等,同时还可以搭配多款功能强大的地面控制站使用。
地面站中可以在线升级固件、调参,使用一套全双工的无线数据传输系统在地面站与自驾仪之间建立起一条数据链,即可组成一套无人机自动控制系统,非常适合个人组建自己的无人机驾驶系统。
二、性能特点•免费的开源程序,支持多种载机。
ArduPlane 模式支持固定翼飞机,Arducoper 模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover 模式支持地面车辆;•人性化的图形地面站控制软件,通过一根Micro_USB 线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU 中,无需编程知识和下载线等其它硬件设备。
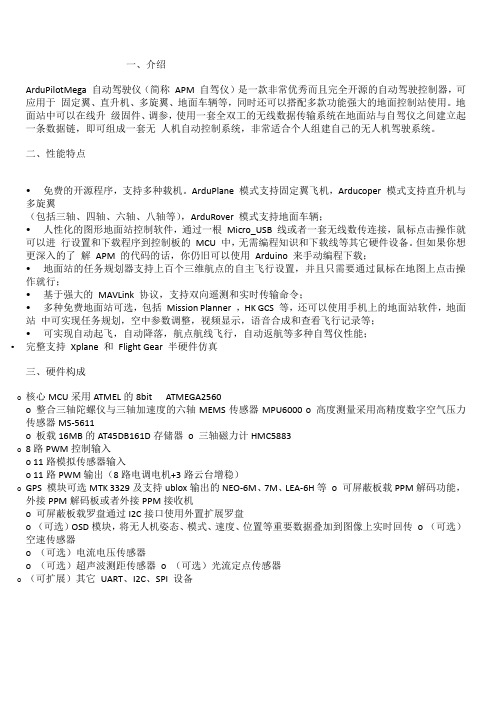
但如果你想更深入的了解APM 的代码的话,你仍旧可以使用Arduino 来手动编程下载;•地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;•基于强大的MAVLink 协议,支持双向遥测和实时传输命令;•多种免费地面站可选,包括Mission Planner ,HK GCS 等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;•可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能;•完整支持Xplane 和Flight Gear 半硬件仿真三、硬件构成o核心MCU采用ATMEL的8bit ATMEGA2560o 整合三轴陀螺仪与三轴加速度的六轴MEMS传感器MPU6000 o 高度测量采用高精度数字空气压力传感器MS-5611o 板载16MB的AT45DB161D存储器o 三轴磁力计HMC5883o8路PWM控制输入o 11路模拟传感器输入o 11路PWM输出(8路电调电机+3路云台增稳)o GPS 模块可选MTK 3329及支持ublox输出的NEO-6M、7M、LEA-6H等o 可屏蔽板载PPM解码功能,外接PPM解码板或者外接PPM接收机o 可屏蔽板载罗盘通过I2C接口使用外置扩展罗盘o (可选)OSD模块,将无人机姿态、模式、速度、位置等重要数据叠加到图像上实时回传o (可选)空速传感器o (可选)电流电压传感器o (可选)超声波测距传感器o (可选)光流定点传感器o(可扩展)其它UART、I2C、SPI 设备四、硬件方框图五、飞控板概览正面图1、数传接口2、模拟传感器接口3、增稳云台输出接口4、ATMEGA2560 SPI 在线编程接口(可用于光流传感器)5、USB 接口6、遥控输入7、功能选择跳线8、GPS 接口9、I2C 外接罗盘接口10、ATMEGA32U2 SPI 在线编程接口11、多功能可配置MUX 接口(默认为OSD 输出)12、电流电压接口13、电调供电选择跳线14、电调输出接口背面图1、SPI 的MISO 电压选择2、PPM 输入选择3、MUX 接口功能选择六、硬件安装在APM 主板拿到手后,首先应明确自己的用途,并且熟悉了上述功能和接口再进行后续的硬件安装和连接。
MP2028自驾仪参数
MP2028自驾仪参数1特点:超小封装:28g;4×10cm自带超声波高度传感器,能垂直起飞、降落(VTOL)支持固定翼和旋翼两种飞行模式产品应用:无人机(UA V,固定翼和旋翼)自动驾驶2详细说明1)伺服机/舵机支持3个机械伺服支持3个90°伺服,CCPM支持4个90°伺服,CCPM支持3个120°伺服,CCPM支持4个伺服,4个corner,CCPM伺服更新速率,50到200 Hz 可选择独立的伺服和main电池电源供应独立的伺服和main电压监视电池供电集成的RC伺服分辨率,11位可选择额外的模数转换(ADC)通道2)导航GPS更新速率:4Hz航点模式下可移动伺服舵机航点模式下可改变高度航点模式下可改变空速用户可自定义待命航线用户可自定义错误处理方式RPV和UA V模式支持DGPS精度缓冲区可存储多达1000个航点命令3)数传遥测,数据记录和视频遥测功能(每秒发送100个用户自定义数据)遥测更新速率,5到30Hz5到30 Hz数据记录更新速率,8个用户可自定义的数据域视频重叠(16个用户自定义数据域)4)控制系统增益调节用于最优控制可选择30/60/180 Hz内部闭环更新速率,支持在地平面之上的自主起飞和降落(VTOL)用户可自定义PID闭环,用户可自定义表查询功能插件同XTENDERmp软件兼容开发包可选5)HORIZONmp地面站软件系统包括HORIZONmp地面控制软件用于操作训练的MP2028g模拟器飞行中增益可调飞行中航点可调地面站可遥控负载伺服舵机支持鼠标点击编辑航点功能6)传感器高度计最大高度:12,000m3轴加速度计,2G3轴陀螺仪最大角速率:150°/s高度更新速率:200Hz12阶卡尔曼滤波7)物理特性重量:28g(包括GPS接收机,陀螺仪及所有的传感器)供电电压:4.2到26V长-宽-高:10-4-1.5cm支持现场软件升。
AVP100使用说明书

系统配置 系统配置如下所示。该图也说明了由一个 SVP、一个便携式设定显示屏、一个现场电流表和 一个齐纳式安全栅组成的一个本质安全系统的布局。 除连接至安全栅非本质安全侧的组件 之外,其它系统组件都必须由一个权威的测试机构进行认证。
图 S-1 本质安全型 SVP 的系统配置
iii 型号 AVP100/102-SVP3000 Alphaplus 智能阀门定位器
注
对用户有用的信息。
拆开包装
务必小心对待设备,防止任何损坏。 请确认包装中含有下列物品: • SVP3000 Alphaplus 智能阀门定位器
型号:AVP100 (1) / AVP102 (1) • 反馈杆 (1)和内六角螺钉 (2)。 • 用于反馈杆的六角扳手 (1) • 压力表 (选购) • 管接头 (选购) • 说明书 (选购)
第二章:安装
2-1 : SVP 装配 .......................................................................................................................................2-3 2-1-1: 安装 SVP 反馈杆 ...................................................................................................................2-3
C 2005!ᓀါ્!ᇊ!ۈཚჅᎌ
安全
安全注意事项
妥善的安装、正确的操作和安装后的维护对本智能型阀门定位器的安全使用都至关重要。 本说明书中提出的安全指示分为 警告 、注意 和 注 三种类型。
本田操作手册

FLY100(富莱100)汽车综合诊断平台操作手册目录前言 (1)欢迎使用FLY100(富莱100)汽车综合诊断平台操作手册 (1)手册使用对象 (2)开始使用FLY100(富莱100)汽车综合诊断平台 (2)登录系统 (2)在线帮助 (5)退出系统 (5)汽车诊断 (5)初始化 (6)车辆详细资料 (6)选择模式 (9)系统选择 (10)一、PGM-F1工具选择 (11)DTC显示 (12)数据表 (15)快摄 (16)ECU重新设置 (19)清除曲轴传感器匹配值 (20)检查 (21)调整 (22)行车记录器 (23)车上快摄 (27)二、AT工具选择 (30)DTC定格数据 (31)数据表 (34)快摄 (36)ECU重新设置 (38)检查 (39)行车记录器 (40)车上快摄 (44)FLY100(富莱100)汽车综合诊断平台其它功能 (45)前言本主题提供以下参考信息:⏹欢迎使用FLY100(富莱100)汽车综合诊断平台操作手册⏹产品背景及功能介绍⏹手册使用对象⏹使用约定欢迎使用FLY100(富莱100)汽车综合诊断平台操作手册欢迎使用FLY100(富莱100)汽车综合诊断平台操作手册,为便于快速了解和使用本系统,本手册提供了详细的操作说明,具有较强的实用性和可操作性。
通过本手册,可以了解到本系统的主要功能和相关的操作界面。
功能介绍FLY100(富莱100)汽车综合诊断平台作为富莱实业公司产品的组成部分,用于实现对汽车的所有电控系统进行检测,其主要功能如下:1.读取故障码和清除故障码支持永久故障码和临时故障码。
一旦故障码被触发,FL Y100(富莱100)即可检测出所有故障码,并且可以清除这些故障码。
目前总共可以检测出10000多条故障代码。
注:相对其他同类产品的优势:针对每一条故障码,都有对应的维修帮助,并且配有维修电路图。
2.数据流该功能可以查看所检测车辆所有系统支持的数据参数。
目前总共可以读出5000多条数据流信息。
曼昆v100gpstracker追踪王使用说明
曼昆V100G P S T R A C K E R追踪王使用说明(总7页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--GPS TRACKER追踪王(GPS+AGPS+LBS+GSM+SMS/GPRS)使用指南(版本)非常感谢你选择使用GPS TRACKER追踪王,使用指南将详细的说明如何操作本产品。
请你在使用之前认真阅读使用指南,以便得到正确使用方法。
如有更改,恕不另行通知,每次更改将统一在最新的一次产品销售中发布,制造商对于使用指南中的过失和疏漏不承担法律责任。
目录1.产品简介2.应用领域3.规格描述4.产品配件5.使用说明SIM卡的安装和设备启动设备充电主控号码设置单次定位基站定位中文地址查询SOS紧急求救远程监听震动报警位移报警电子围栏超速报警低电报警睡眠省电模式设置设防/重启和恢复出厂设置查询设备状态6.监控平台应用7.故障排除8.保修1.产品简介GPS TRACKER追踪王融合了GSM无线通信技术及GPS全球定位系统技术,采用工业级防火材料,6颗18MM×3MM强磁装置,IPX-5防水等级设计,内置8000MAH大容量电池,超长待机100天,通过短信和全球定位服务平台实现对远程目标进行定位和监控管理。
强磁免安装设计,简单易用。
2.应用领域●汽车租赁/小型车队管理●户外活动●儿童/老人/残疾人士/贵重物品的监护●个人安全●人员管理●跟踪定位●动物保护和放牧● 5V 1000MA充电器一个●充电线一条●使用指南和保修卡一本●GPS TRACKER追踪王设备一台5.使用说明SIM卡的安装和设备启动打开包装盒,检查设备型号是否正确,配件是否齐全,否则请联络你的经销商;SIM卡选择,设备需要插入一张GSM SIM卡,GSM卡联通或移动任选(GSM 网络全球通用)SIM卡的安装,拆开设备防水塞,依据标示,SIM卡芯片朝下插入卡槽,盖上防水塞。
NP-100固定翼自驾仪数据手册

AP系列自驾仪系统NP-100自动驾驶仪数据手册2015年3月成都纵横自动化技术有限公司2 / 5版权所有 © 成都纵横自动化技术有限公司 2006-2015 保留一切权利NP-100自驾仪是成都纵横自动化技术有限公司专为小型及微型无人机开发的一款低成本、高集成度的飞控与导航系统。
不仅集成了专业的IMU 、磁传感器、动静压传感器及GPS 模块,还集成了传输距离可达60Km 的微型数据链路,采用J30J 航空连接器,包括金属外壳的重量仅为120克。
性能特点非线性高精度GPS/SINS/AHRS 算法,具有200Hz 更新频率,无GPS 信号时自动平滑切换为AHRS 模式,确保飞行安全; 200Hz 控制指令更新频率,适合于性能要求高的特种微型无人机;采用基于总能量的自适应控制算法,对于常规布局的固定翼无人机,几乎不用调整参数,即装即飞;内置8MByte 数据记录仪,能够完整记录1~2小时飞行数据; 内置1W 跳频数传电台,通信距离最远可达60Km ; 体积小,重量轻。
主要用途微型及小型固定翼无人机 小型电动无人直升机 小型特种布局无人机关键指标电气参数供电:DC输入,电压范围8~26V功耗:<5W物理特性外形尺寸:100×55×19mm重量:120克(包括外壳)使用环境存储温度:-40ºC~+85ºC使用温度:-20ºC~+60ºC(校准温度范围)机械尺寸3 / 5版权所有©成都纵横自动化技术有限公司2006-2015 保留一切权利连接器定义AP-100自驾仪连接器采用J30J-31微矩形航空标准连接器,具有插接紧密,接触牢靠,抗振动性高等特点。
4 / 5版权所有©成都纵横自动化技术有限公司2006-2015 保留一切权利* GND 地在电路板内部被连接在一起5 / 5版权所有©成都纵横自动化技术有限公司2006-2015 保留一切权利。
NPS100停车场管理系统使用手册ver2.03
智能停车场管理系统使用手册Version 2.03目录一、系统简介 (8)二、系统组成 (8)2.1硬件设备配置清单 (8)2.2软件系统配置清单 (16)三、系统结构 (17)3.1系统结构图 (17)3.2系统工作流程 (17)四、系统安装调试 (19)4.1、硬件设备的安装调试 (19)4.1.1、100M局域网的安装调试 (19)4.1.2、票箱的安装调试 (21)4.1.3、连接网络 (24)4.1.4、连接读卡器 (24)4.1.5、连接道闸 (26)4.1.6、卡机、灯光、显示屏、喇叭、麦克风等安装 (26)4.1.7、地感线圈的安装调试 (28)4.1.8、摄像头的安装调试 (32)4.1.9、照明灯的安装调试 (34)4.2、NPS100主控制板设置 (34)五、服务器安装调试 (36)5.1服务器软件安装 (36)5.1.1 安装JRE (37)5.1.2 安装数据库 (37)5.1.3 WEB 程序的安装 (38)5.2服务器功能配置 (40)5.2.1 服务器的启动 (41)5.2.2 登陆服务器 (41)5.2.3 配置系统信息 (44)5.2.4 配置系统密钥 (46)5.2.5 配置系统费率 (46)5.2.6 分区设置 (47)5.2.7 添加收费终端以及控制器 (48)5.2.8 启动控制器服务程序 (56)..................................................................................... 5.2.9 发行值班员卡 .. (57)5.2.10 发行临时卡 (59)5.2.11 发行用户车卡(贵宾卡,免费卡,月卡,储值卡) (61)经过以上设置后,停车场系统配件—车卡与值班员卡就发行成功了.下一步,就是值班员登陆收费终端进行工作了.如何使用收费终端,请查看”收费终端电脑的安装调试”. (63)六、收费终端电脑的安装调试 (64)6.1、终端配置 (64)6.1.1、收费终端电脑读卡器的安装调试 (64)6.1.2、收费终端电脑采集卡的安装调试 (65)6.1.3、收费终端电脑麦克风的安装调试 (65)6.1.4、收费终端电脑音箱的安装调试 (66)6.2、收费终端软件系统的安装使用 (66)6.2.1 软件安装 (66)6.2.2 收费终端功能简介 (67)6.2.3 登录收费终端 (67)6.2.4 收费终端界面介绍 (69)6.2.5 收费终端配置 (73)6.2.6 车卡出场操作 (77)6.2.7 重印票据 (80)6.2.8 开钱柜 (81)6.2.9 手动计价 (81)6.2.10 遗失卡 (82)6.2.11 车卡延期 (85)6.2.12 车卡充值 (87)6.2.13 值班员下班 (88)七、系统管理与维护 (90)7.1、停车场管理系统WEB平台功能介绍 (90)7.1.1 菜单设置 (90)7.1.2 角色设置 (91)7.1.3 权限设置 (92)7.1.4 数据备份 (94)7.1.5 数据还原 (95)7.1.6 LED显示屏信息及语音下载 (96)7.1.7 IO测试 (98)7.1.8 卡片检测 (99)7.1.9 卡片延期 (100)7.1.10 卡片充值 (101)7.1.11 卡片挂失 (102)7.1.12卡片解挂 (105)7.1.13 卡片更换 (105)7.1.14 卡片回收 (106)7.1.15 车主档案 (107)7.1.16 车辆档案 (108)7.1.17 车卡档案 (108)7.1.18 车型卡发行 (109)7.1.19 记录查询 (110)7.1.20 报表统计 (112)7.2、维护停车场系统 (112)7.2.1、硬件设备的维护 (112)7.2.2、软件系统的维护 (113)7.3、升级停车场系统 (114)八、系统常见故障和排除 (115)8.1、硬件设备故障和排除 (115)8.2、软件系统故障和排除 (117)8.2.1、停车场管理系统Web管理平台的故障和排除 (117)8.2.2、停车场管理系统管理服务器软件的故障和排除 (118)8.2.3、停车场管理系统岗亭收费终端软件的故障和排除。
富士非金属管线测位器NPL100
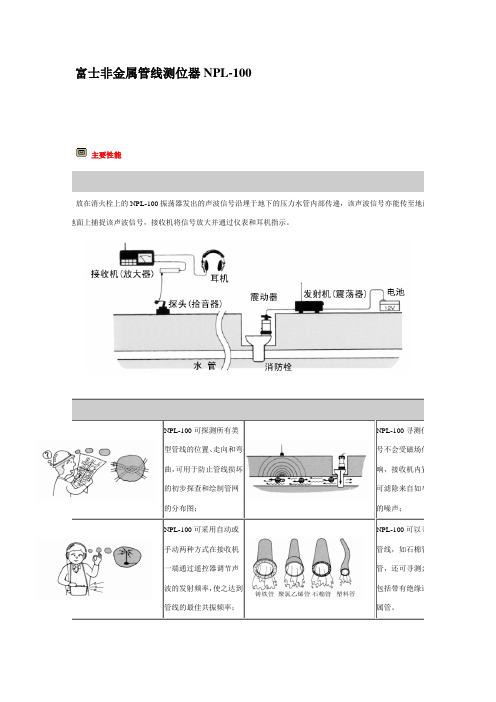
富士非金属管线测位器NPL-100
主要性能
示,放在消火栓上的NPL-100振荡器发出的声波信号沿埋于地下的压力水管内部传递,该声波信号亦能传至地面。
在地面上捕捉该声波信号,接收机将信号放大并通过仪表和耳机指示。
能
NPL-100可探测所有类型管线的位置、走向和弯曲,可用于防止管线损坏的初步探查和绘制管网的分布图;NPL-100寻测仪的号不会受磁场信号响,接收机内置滤可滤除来自如车辆的噪声;
NPL-100可采用自动或手动两种方式在接收机一端通过遥控器调节声波的发射频率,使之达到管线的最佳共振频率;NPL-100可以寻测管线,如石棉管或管,还可寻测金属包括带有绝缘连接属管。
仪器组成
成
机组成: 2.接收机组成:
.....................1放大器 (1)
.....................1 拾音器 (1)
.....................1 耳机 (1)
缆..................2 背带 (1)
(1)
携带箱
技术参数
点
:接收机:
12V DC 电源电池LR6 1.5V×6 (9V DC) 耗20W 电流损耗100mA
50~500Hz 放大倍数80dB
度范围-10℃~+55℃频率80~500Hz
170×210×120mm 工作温度范围-10℃~+55℃
1.0Kg 耳机输出阻抗8Ω(立体声)
显示方式指针式仪表
尺寸170×75×140mm。
车辆检测器说明书
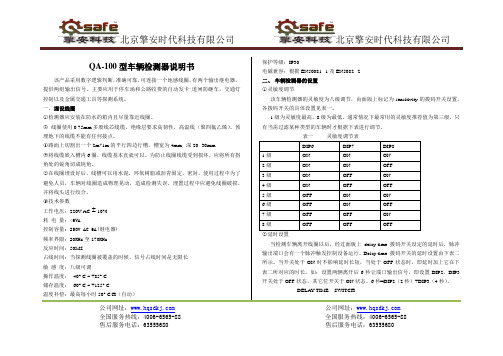
北京擎安时代科技有限公司北京擎安时代科技有限公司公司网址:公司网址:全国服务热线:4006-6565-88 全国服务热线:4006-6565-88北京擎安时代科技有限公司北京擎安时代科技有限公司公司网址: 公司网址:全国服务热线:4006-6565-88 全国服务热线:4006-6565-88 DIP1 DIP2 DIP3 ON No effect No effect No effect OFF Add 1 secondAdd 2 secondAdd 4 second表二 延时设置表○3输出状态选择 当拨码开关第四位为ON 时,同时输出两组状态信号当拨码开关第四位为OFF 时,输出一组状态信号,一组脉冲信号(即关闸信号)○4灵敏度加倍设置 当拨码开关第5位为ON 时,灵敏度加倍功能关闭当拨码开关第5位为OFF 时,灵敏度加倍功能开启,此时地感工作处于超灵敏度状态下,只适用于铺埋超大线圈的场合(超过3M*3M ),如线圈过小容易造成死机,需谨慎使用。
通常情况下此功能处于关闭状态。
○5接线端口 1. 220V 交流输入 2. 220V 交流输入 3. 脉冲输出常开端 4. 脉冲输出公共端 5. 状态输出常开端 6. 状态输出公共端 7. 接探测线圈 8. 接探测线圈 9. 空10. 状态输出常闭端 11. 脉冲输出常闭端○6 控制面板说明如上图所示Reset 为检测器复位钮,拨码设置后,需进行复位,新的设置才会生效。
Status 为工作状态时,当检测到车辆时亮,如因线圈抖动造成常亮,需按复位钮进行复位.Power 为电源指示灯,正常工作中常亮。
三、 与挡车器的连接○1防砸车,自动关闸功能的接线方式。
将状态输出常闭端和状态输出公告端的两个接线端与道闸机的红外输入端口连接(如果道闸机没有红外输入端口,可接到关闭控制或停止控制端口)。
将脉冲输出端口常开端和脉冲输出公共端的两个接线端与道闸机的关闭控制端口连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AP系列自驾仪系统
NP-100自动驾驶仪
数据手册
2015年3月
成都纵横自动化技术有限公司
2 / 5
版权所有 © 成都纵横自动化技术有限公司 2006-2015 保留一切权利
NP-100自驾仪是成都纵横自动化技术有限公司专为小型及微型无人机开发的一款低成本、高集成度的飞控与导航系统。
不仅集成了专业的IMU 、磁传感器、动静压传感器及GPS 模块,还集成了传输距离可达60Km 的微型数据链路,采用J30J 航空连接器,包括金属外壳的重量仅为120克。
性能特点
非线性高精度GPS/SINS/AHRS 算法,具有
200Hz 更新频率,无GPS 信号时自动平滑切换为AHRS 模式,确保飞行安全; 200Hz 控制指令更新频率,适合于性能要求
高的特种微型无人机;
采用基于总能量的自适应控制算法,对于常规布局的固定翼无人机,几乎不
用调整参数,即装即飞;
内置8MByte 数据记录仪,能够完整记录1~2小时飞行数据; 内置1W 跳频数传电台,通信距离最远可达60Km ; 体积小,重量轻。
主要用途
微型及小型固定翼无人机 小型电动无人直升机 小型特种布局无人机
关键指标
电气参数
供电:DC输入,电压范围8~26V
功耗:<5W
物理特性
外形尺寸:100×55×19mm
重量:120克(包括外壳)
使用环境
存储温度:-40ºC~+85ºC
使用温度:-20ºC~+60ºC(校准温度范围)
机械尺寸
3 / 5
版权所有©成都纵横自动化技术有限公司2006-2015 保留一切权利
连接器定义
AP-100自驾仪连接器采用J30J-31微矩形航空标准连接器,具有插接紧密,接触牢靠,抗振动性高等特点。
4 / 5版权所有©成都纵横自动化技术有限公司2006-201
5 保留一切权利
* GND 地在电路板内部被连接在一起
5 / 5
版权所有©成都纵横自动化技术有限公司2006-2015 保留一切权利。