电动扫地车执行机构电气控制设计.docx
扫地机智能控制系统设计

碰撞检测采用霍尔元件 EW462,芯片的内部原理框图如图3-4所示,芯片的工作方式 如图3-5所示。芯片的供电电压范围为 4.5V~18V,灵敏度高,阻抗低,工作的最大输出 电流为 15mA。当芯片的正上方有S极磁场时,霍尔元件输出高电平,当元件偏离磁场 后,元件输出低电平。通过控制霍尔元件正上方的磁场极性,可以控制元件输出信号 的变化趋势。当极性相反时,元件在偏离磁场时为高电平,正对磁场时为低电平。
Part Two
采用单片微机控制器
单片微控器
本设计以AT89C51单 片机作为检测和控制核
心。是美国ATMEL公司 生产的低电压,高性能
CMOS 8位单片机。兼容 标准MCS-51指令系统,
片内置通用8位中央处理 器(CPU)和Flash存储 单元。
AT89C51 主要性能参数
1.与MCS-51产品指令系统完全兼容 2.有4K字节可重擦写Flash闪速存储器 3.有1000次的擦写周期 4.全静态操作:0Hz~24MHz 5.有128×8字节的内部RAM 6.有32个可编程I/O 口 7.有2个16位定时/计数器 8.有6个中断源 9.低功率空闲和掉电模式
AT89C51 引脚
VCC:电源电压 GND:接地 P0口:P0口是一组8位漏极开路型双向I/O,也即地址/数据总线复用口。 P1口:P1口是一个携带内部上拉电阻的8位双向I/O口,P1的输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。 P2口:P2口是一个带有内部上拉电阻的8位双向I/O口,P2的输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。 P3口:P3口是一组带有内部上拉电阻的8位双向I/O口,P3口输出缓冲级可驱 动(吸收或输出电流)4个TTL逻辑门电路。
电动道路清扫车清扫系统设计

开题报告摘要作为一种频繁穿梭于城市街道的卫生工具,“道路清扫车”对城市的形象有很大的影响。
因此,一个小的道路清扫车不仅要提高它的性能,而且要有一个符合城市实际需要和城市形象的漂亮的外形。
中国道路清扫车行业经过几十年的发展,产品从单一的纯扫式发展到各种各样的类型,产品的性能和质量迅速增长,特别是在改革开放之后,进口的清扫装置关键部分使得道路清扫车产品性能和可靠性高。
但目前我国道路清扫车的水平仍与发达国家有较大的差距,特别是在产品可靠性方面。
文中介绍了道路清扫车清扫装置的设计说明。
本文介绍了电动道路清扫车的常见问题。
对除尘装置进行了详细设计,介绍了相关设备的原理,并进行了比较分析。
对扫盘、吸嘴、集尘箱、风机及其他设备的选择进行了仔细的比较和分析。
新的电动道路清扫车可以将路面的垃圾和尘土全面的清洁,清扫效率非常高,适合各种气候的干式路面清洁操作,以确保道路清洁操作的安全。
关键词:道路清扫车扫刷扫盘吸嘴集尘箱ABSTRACTAs a sanitary tool that frequently travels through city streets, "path sweeper" has a big impact on the city's image. As a result, a small road sweeper should not only improve its performance, but also have a beautiful look that matches the city's actual needs and the city's image. Road sweeper industry in China after decades of development, the development of products from a single pure sweep type all sorts of types, product quality and performance of rapid growth, especially after the reform and opening up, import a key part of cleaning device makes the road sweeper products performance and high reliability. However, the level of road sweeper in our country is still far from the developed countries, especially in terms of product reliability.This paper introduces the design of the cleaning equipment of road sweeper. This paper introduces the problem of electric road sweeper. The design of the dust removal device is detailed, the principle of related equipment is introduced, and the comparison analysis is carried out. The selection of sweep, mouth, dust box, fan and other equipment was carefully compared and analyzed. New electric road sweeper pavement can be garbage and comprehensive dust cleaning, cleaning efficiency is very high, suitable for all kinds of climate dry surface cleaning operation, to ensure the safety of road cleaning operations.Key words: the path sweeps clear the vehicle the scanning sweeps the plate attracts the mouth the collection dust box目录摘要 (I)ABSTRACT (V)第1章绪论 (1)1.1 道路清扫车的意义和目的 (1)1.1.1 道路清扫车的意义 (1)1.1.2 道路清扫车的目的 (1)1.2 道路清扫汽车的发展与展望 (1)1.2.1 道路清扫汽车的发展历史 (1)1.2.2 道路清扫汽车的现状 (2)1.2.3 道路清扫车的发展与展望 (2)1.3道路清扫车的比较 (2)1.4本设计的主要内容 (3)第2章电动道路清扫车的总体设计 (4)2.1设计思想 (4)2.2整车参数的确定 (4)2.2.1尺寸参数 (4)2.2.2质量参数 (4)2.3总体设计 (5)2.3.1工作原理 (5)2.3.2构造及功能 (5)2.4本章小结 (6)第3章主要零件的设计 (7)3.1集尘箱的设计 (7)3.2扫盘和扫刷的设计 (7)3.3扫盘的布置形式 (8)3.4吸嘴的设计 (9)第4章清扫和吸尘系统的动力选择 (11)4.1清扫系统的动力选择 (11)4.2扫盘的驱动马达选择 (11)4.3 风机的选择 (12)4.4本章小结 (12)第5章清扫车工作原理分析 (13)5.1清扫车清扫过程 (13)5.1.1 扫盘的工作方式 (13)5.1.2 吸尘装置的工作方式 (13)5.1.3 垃圾箱的清理 (13)5.2 本章小结 (13)结论 (14)致谢 (15)参考文献 (16)第1章绪论1.1 道路清扫车的意义和目的1.1.1 道路清扫车的意义随着我国综合国力的不断提升,工业的发展速度迅速,环境的污染也越来越严重,道路的垃圾和尘土也越来越多。
基于PLC的小型纯电动清扫车控制系统设计
基于PLC的小型纯电动清扫车控制系统设计作者:毛华峰海争平杨凡来源:《中小企业管理与科技·上旬刊》2013年第03期摘要:本文以小型纯电动清扫车为研究对象,根据清扫车的结构和工作原理,分析清扫系统的控制需求,基于PLC控制器设计了清扫系统的电路和控制程序,实车测试后表明该控制系统结构简单,操作方便,可靠性高。
关键词:纯电动清扫车控制系统 PLC0 引言汽车尾气排放所引起的空气污染问题和石油危机问题,使得采用绿色能源的电动汽车受到越来越多的人的关注。
人们普遍认为纯电动汽车将是未来汽车工业的发展趋势,但是受到现有电池技术水平的限制,电池能量密度普遍偏低,导致纯电动汽车的续驶里程有限,另外充电设施建设以及安全问题,使得纯电动化在家用乘用车和长途货运领域的发展受到极大的限制。
小型清扫车作为面向住宅区、厂区的清扫专用车,具有区域化工作,里程固定,使用时间短等特点,可以忽略上述限制,非常适合纯电动化。
本文将研究以铅酸电池为能源,电池为驱动系统的小型电动清扫车,设计出操作简单,工作可靠的控制系统。
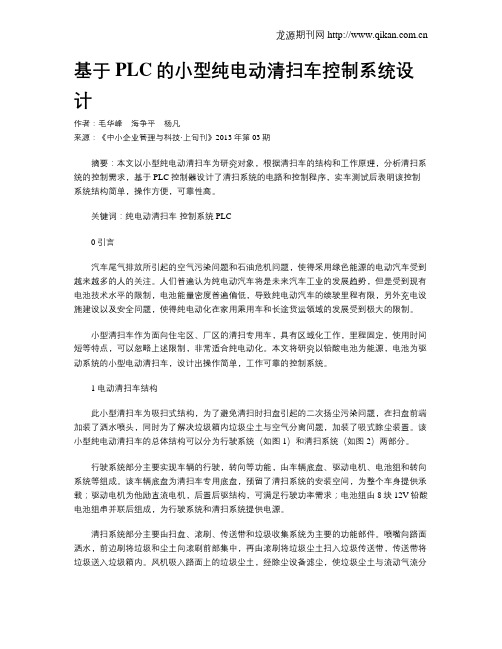
1 电动清扫车结构此小型清扫车为吸扫式结构,为了避免清扫时扫盘引起的二次扬尘污染问题,在扫盘前端加装了洒水喷头,同时为了解决垃圾箱内垃圾尘土与空气分离问题,加装了吸式除尘装置。
该小型纯电动清扫车的总体结构可以分为行驶系统(如图1)和清扫系统(如图2)两部分。
行驶系统部分主要实现车辆的行驶,转向等功能,由车辆底盘、驱动电机、电池组和转向系统等组成。
该车辆底盘为清扫车专用底盘,预留了清扫系统的安装空间,为整个车身提供承载;驱动电机为他励直流电机,后置后驱结构,可满足行驶功率需求;电池组由8块12V铅酸电池组串并联后组成,为行驶系统和清扫系统提供电源。
清扫系统部分主要由扫盘、滚刷、传送带和垃圾收集系统为主要的功能部件。
喷嘴向路面洒水,前边刷将垃圾和尘土向滚刷前部集中,再由滚刷将垃圾尘土扫入垃圾传送带,传送带将垃圾送入垃圾箱内。
自动扫地机的控制系统设计_毕业设计说明书

本科毕业设计说明书自动扫地机的控制系统设计DESIGN OF CONTROL SYSTEM OF AUTOMATICSWEEPING MACHINE自动扫地机的控制系统设计摘要近年来,随着社会的发展需要,清洁机器人已经渗透了我们的生活、工作和经济方面,并且起到了很大的作用。
清洁机器人的研究和发展对我们的经济发展有很多的影响。
这片文章主要通过阐述清洁机器人在服务行业的重要性,对清洁机器人在各国发展状况的一些综述,让读者了解将来清洁机器人发展对社会发展的重要性。
本文首先介绍了国内外自动清洁扫地机的研究现状,阐明了本课题研究的目的、意义。
然后进一步介绍本自动扫地机的总体结构,并详细分析了该扫地机各部分结构的工作原理,针对本清洁扫地机的机构特点,提出了一种能够保证扫地机稳定工作的单片机控制方案。
本文还添加了市场上没有出现的的功能,将扫地机和红外遥控结合起来,并与单片机有机结合起来,以达到对自动扫地机的各方面的控制和自控制;以及避障系统的改进方案。
关键词:扫地机,单片机控制,红外遥控,碰撞DESIGN OF CONTROL SYSTEM OF AUTOMATICSWEEPING MACHINEABSTRACTIn recent years, with the development of society, the cleaning robot has infiltrated our lives, work and the economy, and has played a significant role. Research and development of cleaning robot has a lot of influence on our economic development. This article mainly through expounding the importance of cleaning robot in the service industry, the development of cleaning robot in some countries, allowing readers to understand the importance of the future development of cleaning robot for social development.This paper firstly introduces the research status of automatic cleaning sweeping machine at home and abroad, discusses the research purpose, significance. And then introduce the automatic sweeping machine structure, and a detailed analysis of the working principle of each part of structure of the sweeping machine, according to the characteristics of the cleaning mechanism of sweeper, presented a can ensure the sweeping machine stable working single-chip microcomputer control scheme. This paper also added did not appear on the market the function, the sweeper and infrared remote control combined with MCU, and organic combination, in order to control all aspects of automatic sweeping machine and self control; and the obstacle avoidance system improvement program.KEYWARDS:Sweeping machine, microcomputer control, infrared remote control, collision目录摘要............................................................... I I ABSTRACT .......................................................... I II 1绪论.. (1)1.1 引言 (1)1.2 技术现状 (1)1.3 研究的目的和意义 (1)1.4 研究内容 (2)2关于单片机 (3)2.1 AT89C51简介 (3)2.2 AT89C51主要特性 (3)2.3 AT89C51功能特性概述 (3)2.4 AT89C51引脚功能说明 (4)2.5 AT89C51的基本操作 (6)3 自动扫地机总体设计 (7)3.1 组成结构 (7)3.2 系统的主控部分 (7)3.3 软件流程设计 (8)3.3.1 总体软件流程 (8)3.3.2 红外遥控系统流程 (10)3.3.3 驱动系统流程 (11)3.3.4 清扫避障系统流程 (12)4自动扫地机硬件电路设计 (13)4.1 系统总体设计 (13)4.2 传感器系统电路 (13)4.2.1 超声波传感器检测电路 (13)4.2.2 红外光电传感器检测电路 (13)4.2.2 红外光电传感器检测电路 (14)4.2.3 接触传感器检测电路 (15)4.3 继电器控制电路 (15)4.4 红外控制系统电路 (16)4.5 看门狗IMP813L电路 (17)4.6 驱动系统电路 (19)4.7 液晶显示电路 (20)4.8 电源模块 (21)4.9 清扫避障系统 (22)结论 (24)参考文献 (25)致谢 (27)1绪论1.1 引言自动扫地机是自动进行房间地而清洁的自主吸尘式家庭服务机器人,集机械学、电子技术、传感器技术、计算机技术、控制技术、机器人技术、人工智能等诸多学科为一体。
上传扫地机智能控制系统设计(27页)

电机fl|FB收糾技术所罚fW柠刺技术,就坫通过 控制f导 体卄左器件的关断,把ft流电报变成电 W脉冲序列并通过 控制电川眯冲宽度或周期以达到变讯 的目的,
边if毛< 1 AR
右
手坊祐及
3.3看门狗电路系统
肴门狗电路系统
单JL f mi的单片机累堆VP賴,对复位电ffi的荜本8求 TF
单片析t:屯时能町#S位.在下电Ittt期止序乱t导效 EPfiOM屮的费 据楗格改t另外,单片机廉》在工作时,由于F扰等 种因來的彩 场,有对使出现死机现象导致单片机系铕无法正常I 作,为f克繼 这,现象,除了充分利用单4机本身的•门fi定吋S (有呰攀片 机i肴门ft定I时器>外.还#外加荇门_电路:除此以外, 有些单g 机系铕还戛求庄抻屯瞬间单片机能格!6®数据保疗下來, 闵神 电的发生拄往是根畴机的,肉而此梵单片机系统霱鍪也镡监控 屯路+在掉电刚发卞时ffift知单片ft+ OF咖讎谲足这咚S 求,
% 3智能扫地机各系统分析
P [传感器系统
驱动系统
扫地机 咅系统
红外遥酿充
浮动开关电路
看门狗电路
液晶显示电路
红外通控是目前使用最广泛的种 通 信和遥控手段,主要用来來控制 皆 能扫地机的浦扫方式及开机与关 机.
浮动开关记-个安装在轮f内侧的机械 JF 关,轮r h有禅算装賣.1轮子浮起 时,开 关断开门地机停ik前进,实现了 防跌落
下面ft体介绍该芯片A/iit用狐
其双列gffittl甩所礼 煽 功—s•
®i利为r幼雙位输入,it'tiTinfflh. sw分别为电》和 地:_4啸 为电源故略输入:第5脚为电_故_出:®6W为看门 捕入,脚鳥隻 位桷出,第8脚为fiNftS出。
基于PLC的小型纯电动清扫车控制系统设计

基于PLC的小型纯电动清扫车控制系统设计本文以小型纯电动清扫车为研究对象,根据清扫车的结构和工作原理,分析清扫系统的控制需求,基于PLC控制器设计了清扫系统的电路和控制程序,实车测试后表明该控制系统结构简单,操作方便,可靠性高。
标签:纯电动清扫车控制系统PLC0 引言汽车尾气排放所引起的空气污染问题和石油危机问题,使得采用绿色能源的电动汽车受到越来越多的人的关注。
人们普遍认为纯电动汽车将是未来汽车工业的发展趋势,但是受到现有电池技术水平的限制,电池能量密度普遍偏低,导致纯电动汽车的续驶里程有限,另外充电设施建设以及安全问题,使得纯电动化在家用乘用车和长途货运领域的发展受到极大的限制。
小型清扫车作为面向住宅区、厂区的清扫专用车,具有区域化工作,里程固定,使用时间短等特点,可以忽略上述限制,非常适合纯电动化。
本文将研究以铅酸电池为能源,电池为驱动系统的小型电动清扫车,设计出操作简单,工作可靠的控制系统。
1 电动清扫车结构此小型清扫车为吸扫式结构,为了避免清扫时扫盘引起的二次扬尘污染问题,在扫盘前端加装了洒水喷头,同时为了解决垃圾箱内垃圾尘土与空气分离问题,加装了吸式除尘装置。
该小型纯电动清扫车的总体结构可以分为行驶系统(如图1)和清扫系统(如图2)两部分。
行驶系统部分主要实现车辆的行驶,转向等功能,由车辆底盘、驱动电机、电池组和转向系统等组成。
该车辆底盘为清扫车专用底盘,预留了清扫系统的安装空间,为整个车身提供承载;驱动电机为他励直流电机,后置后驱结构,可满足行驶功率需求;电池组由8块12V铅酸电池组串并联后组成,为行驶系统和清扫系统提供电源。
清扫系统部分主要由扫盘、滚刷、传送带和垃圾收集系统为主要的功能部件。
喷嘴向路面洒水,前边刷将垃圾和尘土向滚刷前部集中,再由滚刷将垃圾尘土扫入垃圾传送带,传送带将垃圾送入垃圾箱内。
风机吸入路面上的垃圾尘土,经除尘设备滤尘,使垃圾尘土与流动气流分离,最后将干净空气排出。
电动清扫车辆动力系统研究
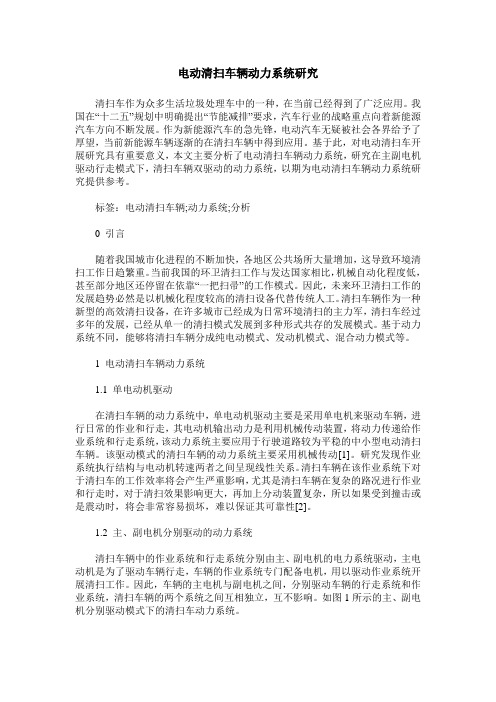
电动清扫车辆动力系统研究清扫车作为众多生活垃圾处理车中的一种,在当前已经得到了广泛应用。
我国在“十二五”规划中明确提出“节能减排”要求,汽车行业的战略重点向着新能源汽车方向不断发展。
作为新能源汽车的急先锋,电动汽车无疑被社会各界给予了厚望,当前新能源车辆逐渐的在清扫车辆中得到应用。
基于此,对电动清扫车开展研究具有重要意义,本文主要分析了电动清扫车辆动力系统,研究在主副电机驱动行走模式下,清扫车辆双驱动的动力系统,以期为电动清扫车辆动力系统研究提供参考。
标签:电动清扫车辆;动力系统;分析0 引言随着我国城市化进程的不断加快,各地区公共场所大量增加,这导致环境清扫工作日趋繁重。
当前我国的环卫清扫工作与发达国家相比,机械自动化程度低,甚至部分地区还停留在依靠“一把扫帚”的工作模式。
因此,未来环卫清扫工作的发展趋势必然是以机械化程度较高的清扫设备代替传统人工。
清扫车辆作为一种新型的高效清扫设备,在许多城市已经成为日常环境清扫的主力军,清扫车经过多年的发展,已经从单一的清扫模式发展到多种形式共存的发展模式。
基于动力系统不同,能够将清扫车辆分成纯电动模式、发动机模式、混合动力模式等。
1 电动清扫车辆动力系统1.1 单电动机驱动在清扫车辆的动力系统中,单电动机驱动主要是采用单电机来驱动车辆,进行日常的作业和行走,其电动机输出动力是利用机械传动装置,将动力传递给作业系统和行走系统,该动力系统主要应用于行驶道路较为平稳的中小型电动清扫车辆。
该驱动模式的清扫车辆的动力系统主要采用机械传动[1]。
研究发现作业系统执行结构与电动机转速两者之间呈现线性关系。
清扫车辆在该作业系统下对于清扫车的工作效率将会产生严重影响,尤其是清扫车辆在复杂的路况进行作业和行走时,对于清扫效果影响更大,再加上分动装置复杂,所以如果受到撞击或是震动时,将会非常容易损坏,难以保证其可靠性[2]。
1.2 主、副电机分别驱动的动力系统清扫车辆中的作业系统和行走系统分别由主、副电机的电力系统驱动,主电动机是为了驱动车辆行走,车辆的作业系统专门配备电机,用以驱动作业系统开展清扫工作。
扫地机的智能控制系统设计

扫地机的智能控制系统设计With the increasing XXX's daily lives。
they are doing service work closely related to people's lives。
XXX the method of area filling。
aiming to find a continuousXXX the set area。
Based on the established sweeping robot platform。
a XXX to cover the blank area of the room in a XXX it encounters obstacles。
it XXX XXX.Keywords: sweeping robot。
single chip puter。
XXX。
path planning.Nowadays。
there is an increasing XXX the quality of life as they handle tasks related to people's daily XXX。
XXX people with the us task of room cleaning。
XXX。
XXX must cover the entire room area using the area XXX moving path planning algorithm has been proposed based on the platform。
The XXX enlarging radius。
allowing it to explore and clean the blank areas。
As XXX furniture。
it will XXX。
single-chip puter。
XXX。
and path planning.引言:现今,自动扫地机器人是服务机器人领域的研究热点。
扫地车设计

机械系统大作业作业题目扫地车设计专业班级机设103班学号*********姓名艾福杨日期2013.11.29第一章总体方案设计1.1研究给定的设计任务表1扫地车设计任务书1.2设计任务抽象化扫地盘旋转扫地筒旋转 扫地盘传动 扫地滚传动 动力功能 传动功能扫地车 控制功能 安全保护转速控制速度控制图1扫地车黑箱1.3确定工艺原理方案扫地盘,扫地筒清扫1.4确定加工工艺方案,画工艺路线图图2工艺路线图1.5功能分解,画出功能树图3功能树1.6 确定每种功能方案、构造形态学矩阵扫地盘将垃圾集中 扫地筒将垃圾扫入垃圾箱 垃圾箱收集 垃 圾脏地面 干净地面表2功能方案表1.7确定边界条件对外部环境要求:干燥,空间对设备要求:噪声,振动,蓄电池1.8方案评价,确定一种方案A1—B1—C2—D11.9画出整机的方案简图图4方案简图1,扫地盘2,扫地筒3,垃圾箱1.10总体布置设计,画出总体布置图1 23图5总体布置图1,扫地盘2,扫地筒3,垃圾箱1.11 确定主要参数车架长宽高:1000×800×600mm扫地车扫地盘转速为60r/min,扫地筒40r/min第二章执行系统设计2.1 画出执行系统方案简图图6扫地滚筒图7扫地圆盘2.2 执行系统运动分析,确定执行系统的运动参数和运动尺寸设计圆盘毛刷受力约为F1=50N,滚筒清扫受力约为F=75N圆盘毛刷半径R=150mm,扫地滚筒半径R=250mm扫地车扫地盘转速为60r/min,扫地筒40r/min第三章传动系统设计3.1 动力机选择类比选用12V250W 齿轮减速电机,其输出转速为600r/min3.2 传动比分配电机到II 轴(扫地筒轴)之间的总传动比 i=1540600n n ==筒电 分配各级传动比设计电机到I 轴的传动比i=5,由I 轴(主轴)到II 轴的传动比i=3 电机到圆盘毛刷的总传动比i=1060600n n ==刷电 齿轮间传动比i=23.3 各轴功率、转矩和转速的确定查得:η齿=0.97、η承=0.99、η链=0.95、η带=0.96表4各轴功率、转矩和转速表 3.4 传动零件的设计计算1)确定计算功率计算功率P C 是根据传递功率P ,并考虑到载荷性质和每天运行时间长短等因素影响而确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
小型自行式电动扫地车执行机构PCU 控制器设计需求书一、项目概述1.1.自行式电动扫地车基本描述:(1)动力源:锂电池或免维护电池,直流,48V。
兼容 36V。
(2)行走机构:单电机链条传动后轮驱动。
(3)转向机构:前单轮人力转向,无转向助力。
(4)扫刷:可升降,每边 1 组 2 个,总计 4 个,工作时速度恒定;扫刷由直流电机经减速器驱动扫刷,扫刷升降机构由电推杆驱动,电推杆由直流电动机驱动。
(5)滚刷: 1 个,将扫刷扫入的垃圾滚卷、旋抛至垃圾箱,直流电动机经带传动驱动,工作时转速恒定。
滚刷升降机构,一种方式是滚刷与后边刷、集尘器刚性连接,由边刷电推杆驱动升降;一种是与集尘器刚性连接,独立设置电推缸驱动升降。
(6)风机: 1 个,吸尘,直接电动机直接驱动。
(7)振尘机构:采用振动的方式把滤网上吸附的垃圾剥离,掉入垃圾箱,由直流电动机直接驱动偏心振动器。
(8)垃圾箱上下车机构:由 2 个液压缸驱动,液压油由 1 台液压齿轮泵提供,三位四通电磁阀控制液压缸。
液压齿轮泵由电动机直接驱动, 2 台液压缸同步由同步阀和刚性连接共同实现同步控制。
(9)喷淋降尘机构:由 1 台直流电动机驱动离心泵供水喷淋,实现降尘。
1.2.项目实施的目的:项目实施的目的是为自行式电动扫地车控制系统设计提供技术参数要求和设计要求,项目实施不涉及自行式电动扫地车的结构设计及其相关计算。
1.3.项目实施时间要求:本项目要求在 6 月 10 日前完成“自行式电动扫地车电气控制设计需求报告”。
二、电动扫地车执行机构动作描述2.1.行走机构1 台 2.5kW、额定转速 1500r/min 直流无刷电动机的转速、转矩经减速器后(需要计算传动比、行走力矩等滞后,才可确定是否需要减速器),通过链条传动输入驱动桥,经主减速器、差速器、半轴,驱动车体行走。
行走驱动电动机为长时间工作制。
行走机构电动机采用无刷直流电动机,有霍尔速度传感器,需能够方便地实现正反转控制和转速控制。
2.2.转向机构前轮转向。
因车体较轻、行走速度较低,前轮又为小型单轮,可采用机械式转向机构,无需转向助力系统。
2.3.扫刷转动机构驱动电动机为直流有刷电动机,单向旋转,额定转速1200r/min ,额定功率100W ,长时间工作制。
电动机应带有减速器(传动比应与扫刷额定转速匹配),减速器输出轴直接驱动扫刷。
扫刷在工作时需长间不间断转动, 4 个扫刷分别采用独立直流电动机驱动。
应注意左侧边刷的两个电动机与右侧边刷的两个电动机转向相反:俯视时,右侧两个边刷旋向为逆时针方向,左侧两个边刷旋向为顺时针方向。
2.4.滚刷机构直流有刷电机,单向旋转,额定转速600r/min ,额定功率 800W,长时间工作制。
通过齿形带或V 形带与滚刷轴端连接(电动机轴端、滚刷轴端带轮直径需要根据滚刷额定工作转速确定)。
2.5.扫刷、滚刷、集料板升降机构升降系统电推杆的电动机须能方便地实现正反转控制和行程控制。
(1)前边刷升降机构前边刷是指车体前端左右两侧的两个边刷。
左右两个的两个边刷各由一台电推杆独自直接驱动升降。
电推杆电动机为直流有刷电机,需进行正反转控制,额定转速 3600r/min ,额定功率 36W。
电推杆行程需要根据具体机构及边刷升降行程计算确定。
(2)后边刷、滚刷、集料板升降机构后边刷是指车体后端左右两侧的两个边刷。
①一种方式是集中升降机构:后边刷、滚刷、集料板通过机械结构连接,同步升降。
左右两侧各由 1 台电推杆驱动。
电推杆电动机为永磁有刷电机,需进行正反转控制,额定转速3600r/min ,额定功率 36W。
电推杆行程需要根据具体机构及边刷升降行程计算确定。
需要注意的是,左右两侧两个电推杆必须通过机械结构和控制实现同步升降,防止左右不同步造成升降机构卡死或滚刷转轴倾斜。
滚刷倾斜会导致清扫质量严重下降,升降机构卡死会造成扫地车无法工作。
②第二种方式是单独驱动升降机构:后边刷升降机构采用前边刷升降方式,即两个边刷分别采用两个独立的电推杆实现升降。
电推杆电动机为永磁有刷电机,需进行正反转控制,额定转速3600r/min ,额定功率 36W。
电推杆行程需要根据具体机构及边刷升降行程计算确定。
而滚刷和集料板共同采用 1 台或 2 台电推杆实现升降(需根据具体的结构进行设计),电推杆电动机为永磁有刷电机,正反转,额定转速3600r/min ,额定功率 36W。
电推杆行程需要根据具体机构及边刷升降行程计算确定。
第二种升降系统的缺点是至少需要多 1 台电推杆。
2.6.风机系统风机系统由风机、电动机组成。
风机驱动电动机为 1 台直流有刷电机,单向旋转,额定转速3000r/min ,额定功率800W,长时间工作制。
电动机是否经减速器后再连接风机,需要根据风机额定转速确定。
建议确定风机额定转速后再确定电动机转速,避免再连接减速器;除非需要减速后提升转矩。
风机电动机必须要防尘、防水、防爆电动机,防止电动机过早损坏或出现危险。
2.7.振尘系统振尘系统由 1 台永磁有刷电机驱动偏心振动发生器,电动机单向旋转,额定转速 1000r/min ,额定功率 100W,短时工作制。
建议振尘电动机直接购买偏心振动电动机,避免再设计偏心振动发生器。
振尘电动机需要防尘、防水电动机。
2.8.喷淋降尘系统由 1 台永磁有刷电机驱动离心式水泵,电动机单向旋转,额定转速须与离心式水泵额定转速匹配(这样可直接与水泵连接,避免再增加减速器),额定功率30W,长时间工作制。
水泵电动机需要防尘、防水电动机。
2.9.液压系统液压系统动力元件由 1 台串励电机直流电动机驱动齿轮泵,电动机单向旋转,额定转速 2800r/min ,额定功率 2200W ,长时间工作制。
建议确定液压系统工作技术参数后选用齿轮泵,根据齿轮泵额定参数确定是否需要加装减速器。
如果需要加装减速器,可直接购买带有减速器的直流电动机(减速器可降速增矩)。
液压系统控制元件建议采用先导式三位四通自复位手动阀,更易控制液压缸运动的平顺性。
三、电器执行元件及其控制要求3.1.电源显示车控钥匙孔在OFF 位置时,车控钥匙插入钥匙孔,为车辆启动工作最好准备;当钥匙旋至 ON 位置时,为各执行系统驱动电动机工作做好通电准备。
当车控钥匙在 ON 位置时,车控钥匙不能拔出取下,只有车控钥匙在OFF 位置时,车控钥匙才能拔出取下。
车控钥匙拔出取下时,全车断电。
此时,电池的正负极与全车截断,防止漏电或维修时电池损坏。
设置电池电压状态显示板,显示电池电压和充电状态;设置电池电压预警和报警系统:当电池电压达到一定值时,预警指示灯(黄色频闪)预警;当电池电压达到极限时,报警蜂鸣器报警,报警指示灯(红色频闪)报警。
3.2.行走系统控制要求(1)行走速度控制与显示行走包括前进和后退。
①电动机转速控制行走驱动电动机为直流电动机,建议采用比例积分调节器进行无差控制。
输入信号为调速电压信号。
②行走速度显示驱动电动机带有霍尔速度传感器,控制系统根据霍尔速度传感器反馈的电动机转速,根据机械传动系统的传动比,建立电动机与行走速度之间的数学模型,通过控制器直接显示车辆行走速度。
(2)电动机启动与正反转控制档杆推至前进位或后退位时,直流电动机不能自行正转或反转,须由操作人员通过加速踏板给定旋转控制信号旋转和加速。
只有操作人员把刹车踏板踩到底,并霍尔转速传感器反馈转速为零时,控制器才会相应前进后退档位变化。
允许车辆前进会后退时,档杆由前进档位或后退档位推至空挡位,但当车辆前进时推到后退档位时,控制器执行空挡操作。
(3)有源逆变反馈控制当档杆在前进档位时,霍尔转速传感器的速度反馈信号大于给定信号时,有源逆变控制回路开始工作,驱动电动机变为发电机,把车辆的惯性能量转变为电能,反馈输送给蓄电池。
因车辆回退时间相对于前进时间过短,为避免有源逆变系统过于复杂,车辆后退时,无需有源逆变。
(4)行车制动由于电动扫地车整车质量相对较小,且行走速度较低,建议简化行车制动系统,采用一般机械拉线式盘刹(类似于摩托车行车制动系统)。
高级一些的摩托车行车制动也有手动液压助力刹车。
(5)驻车制动①一种形式是与行车制动并联,手动拉杆控制。
这样可使制动系统简化。
②在驱动电机输出端采用刹车带作为驻车制动。
带式驻车制动器结构简单,驻车效果良好。
3.3.边刷、滚刷、集料板控制系统(1)工作前的安全控制车控钥匙旋至 ON 位置时,若边刷、滚刷和集料板的 4 个升降电推杆任何一个没有处于上止点位,电推杆驱动电动机将立刻得电,驱动电推杆工作,提升边刷、滚刷和集料板上升至上止点位。
这种控制的目的是避免边刷、滚刷处于下止点位且没有旋转工作时,车辆直接行走造成刷毛受损。
(2)工作与行走控制①按下工作按钮, 4 个电推杆驱动电动机、 4 个边刷旋转驱动电动机、 1 个滚刷旋转驱动电动机同时得电工作;当电推杆下降至下止点(工作位置)时,电推杆驱动电动机停止工作,同时锁定 4 个边刷旋转驱动电动机、1 个滚刷旋转驱动电动机保持得电工作状态。
工作按钮按下的同时,驾驶室顶端工作灯、前后、左右两侧工作指示灯开始得电,显示扫地车处于工作状态;建议顶灯采用旋转式黄色旋转灯,前后、左右工作指示灯采用黄色频闪指示灯;驾驶室设置扫地工作指示灯,与驾驶室外侧工作指示灯同步,建议采用红色指示灯(最好不频闪,防止干扰操作人员驾驶)。
②按下停止按钮, 4 个电推杆驱动电动机得电,驱动电推杆上升;此时,1个滚刷驱动电动机、 4 个边刷驱动电动机不失电,继续旋转。
当电推杆提升边刷、滚刷和集料板上升至上止点时, 4 个电推杆驱动电动机、4 个边刷驱动电动机、 1 个滚刷驱动电动机失电停止工作,并锁定失电状态;同时,驾驶室顶端工作灯、前后、左右两侧工作指示灯失电,表示扫地车处于非工作状态。
建议采用非工作状态指示灯:与工作状态指示灯联锁,即工作指示灯得电时,非工作指示灯自动失电,当工作指示灯失电时,非工作指示灯自动得电。
非工作指示灯建议采用绿色(最好不频闪,防止干扰操作人员驾驶)。
3.4.风机控制建议风机单独控制。
在路面无尘状态下,可不开风机,节省电能。
路面尘较大或清扫扬尘较大时,独立控制风机开启。
设置风机工作指示灯:当风机工作时,指示灯亮;否则指示灯熄灭。
3.5.水泵电机控制①水泵电机工作控制建议水泵电机单独控制。
需要喷淋降尘时,单独开启水泵电机工作;不需要喷淋降尘时,关闭水泵电机,可节省电能和水箱水源。
设置水泵电动机工作指示灯:当水泵电动机工作时,指示灯亮;否则指示灯熄灭。
②水箱水位显示及水箱水位与水泵电动机互锁控制水箱应设置水位测定装置,并能够在驾驶室显示水箱水位。
水箱水位测定装置应能够锁定水泵电动机的得电状态,即当水位低于安全水位时,水泵电动机无法启动工作,防止水泵产生汽蚀。