[Labview经验]机器视觉系列—— Vision 基础知识下集
机器视觉系统原理及基础知识分解共56页

11、用道德的示范来造就一个人,显然比用法律来约束他更她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
6、最大的骄傲于最大的自卑都表示心灵的最软弱无力。——斯宾诺莎 7、自知之明是最难得的知识。——西班牙 8、勇气通往天堂,怯懦通往地狱。——塞内加 9、有时候读书是一种巧妙地避开思考的方法。——赫尔普斯 10、阅读一切好书如同和过去最杰出的人谈话。——笛卡儿
Thank you
LabVIEW与机器视觉像处理与分析的实践应用

LabVIEW与机器视觉像处理与分析的实践应用LabVIEW与机器视觉图像处理与分析的实践应用机器视觉图像处理与分析在现代工业中起着重要作用,能够实现自动检测、测量和控制。
而LabVIEW作为一款全面的虚拟仪器软件平台,提供了强大的图像处理与分析功能,成为了机器视觉应用的理想选择。
本文将着重介绍LabVIEW在机器视觉图像处理与分析方面的实践应用。
一、图像获取与处理实现机器视觉的第一步是获取图像数据,并对图像进行处理。
在LabVIEW中,可以通过各种图像采集设备获取图像,并利用图像处理工具箱提供的丰富功能进行处理。
例如,可以利用边缘检测算法准确地提取目标物体的轮廓,或者利用色彩空间转换技术实现颜色的识别与分类。
二、特征提取与分析在机器视觉应用中,特征提取是非常关键的一步。
LabVIEW提供了多种特征提取的方法,包括形状特征、纹理特征、颜色特征等。
通过这些特征提取方法,可以对目标物体进行描述和分类,并进行相关的分析。
例如,在产品质量检测中,可以通过提取特征判断产品是否合格。
三、目标检测与跟踪目标检测与跟踪是机器视觉应用的核心任务之一。
LabVIEW提供了多种目标检测与跟踪算法,包括背景减除、模板匹配和粒子滤波等。
这些算法可以帮助我们实现实时的目标检测与跟踪,并对目标物体进行定位与追踪。
例如,在自动驾驶领域,可以利用LabVIEW实现车辆的实时检测与跟踪。
四、图像分割与识别图像分割与识别是机器视觉应用中的重要环节。
LabVIEW提供了多种图像分割与识别算法,包括阈值分割、边缘分割和区域生长等。
这些算法可以帮助我们实现图像中目标物体的分割与识别。
例如,在人脸识别领域,可以利用LabVIEW实现人脸的准确分割与识别。
五、应用案例下面我们以一个实际的应用案例来展示LabVIEW与机器视觉图像处理与分析的实践应用。
假设我们需要实现一个自动化的水果分拣系统,该系统需要对水果进行分类,并将其放置在相应的容器中。
如何利用LabVIEW进行像处理和计算机视觉
如何利用LabVIEW进行像处理和计算机视觉如何利用LabVIEW进行图像处理和计算机视觉LabVIEW是一款功能强大且易于使用的图形化编程环境,广泛应用于各种工程领域。
在数字图像处理和计算机视觉方面,LabVIEW也提供了丰富的工具和函数,使得图像处理和计算机视觉的实现变得简单高效。
本文将介绍如何利用LabVIEW进行图像处理和计算机视觉,为初学者提供一些基础知识和实际操作案例。
一、LabVIEW图像处理工具简介LabVIEW提供了一系列强大的图像处理工具,包括滤波、边缘检测、直方图均衡化等。
这些工具可以帮助我们对图像进行增强、去噪、边缘提取等各种操作。
通过使用这些工具,我们可以改善图像质量,提取出感兴趣的信息,为后续的计算机视觉任务打下基础。
二、LabVIEW计算机视觉工具简介LabVIEW还提供了各种计算机视觉工具,如特征提取、对象检测、运动跟踪等功能。
这些工具可以帮助我们识别、跟踪、测量图像中的对象。
例如,通过特征提取,我们可以提取出图像中的边缘、角点等特征,从而实现目标检测和识别;通过运动跟踪,我们可以实现对运动物体的跟踪和定位。
三、LabVIEW图像处理和计算机视觉案例分析为了更好地理解和学习LabVIEW的图像处理和计算机视觉功能,我们可以结合一些实际案例进行分析。
1. 图像增强假设我们需要改善一幅模糊图像的质量,使其更加清晰。
我们可以使用LabVIEW提供的滤波工具进行模糊图像的去噪和增强。
首先,我们可以选择适当的滤波算法,如均值滤波、中值滤波等,对图像进行滤波处理;然后,我们可以利用直方图均衡化来增强图像的对比度,使图像更加清晰明亮。
2. 对象检测假设我们需要在一张图像中检测出目标对象的位置。
我们可以利用LabVIEW提供的特征提取工具,找到目标对象的特征点或特征线;然后,通过特征匹配,可以确定目标对象的位置和方向。
通过这种方式,我们可以实现对目标对象的自动检测和定位。
3. 运动跟踪假设我们需要实现对运动物体的跟踪和定位。
使用LabVIEW进行机器视觉应用开发

使用LabVIEW进行机器视觉应用开发机器视觉是一门涉及从图像和视频中获取、处理和分析信息的领域。
通过将机器视觉与LabVIEW这一强大的编程环境相结合,我们可以轻松地开发出各种应用,如图像处理、目标检测、物体识别等。
本文将介绍如何使用LabVIEW进行机器视觉应用开发。
一、LabVIEW简介及环境搭建LabVIEW是一种图形化编程语言,它采用数据流编程模型,使用图形化的块图形式进行程序设计。
在开始开发机器视觉应用之前,我们首先需要安装LabVIEW软件并搭建相应的环境。
1.1 软件安装LabVIEW可以从官方网站下载并安装,根据操作系统选择合适的版本进行安装。
安装完成后,我们可以启动LabVIEW并创建一个新的项目。
1.2 硬件准备在进行机器视觉应用开发之前,我们需要准备相关的硬件设备,如相机、图像采集卡等。
这些设备将帮助我们获取图像或视频数据,作为机器视觉应用的输入。
二、LabVIEW图形化编程基础在开始编写机器视觉应用之前,我们需要了解LabVIEW的图形化编程基础。
LabVIEW的图形化编程主要由前面板和块图两部分组成。
2.1 前面板在LabVIEW中,前面板类似于应用程序的用户界面,我们可以在前面板上添加控件来与用户交互。
对于机器视觉应用来说,我们可以添加图像显示控件、按钮控件等,以便用户观看图像并控制应用的运行。
2.2 块图块图是LabVIEW中程序的核心部分,我们可以在块图中添加、连接和配置各种功能模块。
对于机器视觉应用来说,我们可以添加图像获取模块、图像处理模块、识别算法模块等,以实现对图像数据的处理和分析。
三、机器视觉应用开发实例下面我们以一个简单的机器视觉应用开发实例来介绍LabVIEW的使用方法。
3.1 目标检测应用假设我们需要开发一个目标检测应用,用于在一幅图像中检测指定的物体。
首先,我们需要在前面板上添加一个图像显示控件,用于显示输入图像和检测结果。
然后,我们可以添加一个图像获取模块,以获取来自摄像头的图像数据。
机器视觉系统原理及基础知识课件

特征提取
从处理后的图像中提取出与目标相关的特征,如颜色、形状、纹理等。
图像采集通过相机、镜头源自设备获取原始图像。图像处理
对采集的图像进行预处理、增强、分割等操作,提取出有用的信息。
图像采集与处理
02
使用光电传感器将光信号转换为电信号,形成原始图像数据。
技术标准和互通性
目前机器视觉技术标准和互通性有待提高,需要制定统一的技术标准,促进不同厂商和系统之间的互通性和互操作性。
THANKS
感谢观看
特点
定义
工业自动化
农业科技
医疗影像分析
安全监控
01
02
03
04
用于生产线上的质量检测、定位、跟踪和引导机器人等。
用于智能农业中的植物生长监测、病虫害检测等。
用于医学影像的自动识别和辅助诊断。
用于公共安全监控、交通违规检测等。
结果输出
将识别结果以图像、文字等形式输出,供用户查看或控制其他设备。
图像识别
图像传感器
镜头选择
光源照明
选择合适的镜头焦距和光圈大小,以获取清晰、无畸变的图像。
合理选择和设计光源照明方案,以提高图像对比度和清晰度。
03
02
01
将彩色图像转换为灰度图像,减少计算量和处理时间。
灰度化
采用滤波器等方法去除图像中的噪声和干扰。
噪声去除
通过对比度拉伸、直方图均衡化等方法增强图像的细节和对比度。
医学影像中的定量分析
机器视觉系统能够对医学影像进行定量分析,如血管狭窄程度、组织密度等,为医生提供更加全面的诊断信息。
医学影像中的三维重建
通过机器视觉技术,可以将二维医学影像进行三维重建,更加直观地展示病灶结构和周围组织关系。
LabVIEW 中Vision各模块说明
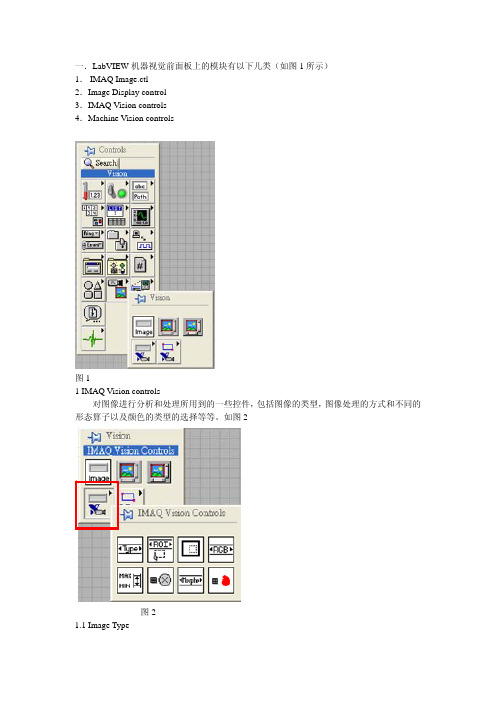
一.LabVIEW机器视觉前面板上的模块有以下几类(如图1所示)1.IMAQ Image.ctl2.Image Display control3.IMAQ Vision controls4.Machine Vision controls图11 IMAQ Vision controls对图像进行分析和处理所用到的一些控件,包括图像的类型,图像处理的方式和不同的形态算子以及颜色的类型的选择等等。
如图2图21.1 Image Type用于图片类型的选择,可以选择的类别有8bits,16bits,Float,Complex,RGB和HSL。
一般用在从文件中读取图片时类型的选择。
1.2 ROI DescriptorROI区域的描述。
ROI是Region Of Interesting的简称,中文应该翻译为目标区域。
一般用在一个大图中取一块特定形状的区域,以便后续的处理和分析。
ROI为一簇数据,包括一个整数数组和一个簇组成的数组。
整数数组内有4个元素,为图形最小外接矩形的四条边的坐标。
簇数组中的簇由轮廓类型(整数),ROI类型(整数)和图形坐标点(为数组,根据ROI类型的不同,数组的定义也不同)1.3Optional Rectangle选择的矩形区域,为四个元素的数组,代表矩形的四条边的坐标。
1.4Color Mode色彩模式,彩色图形的显示和处理模式,包括RGB,HSL,HSV,HIS四种。
1.5Threshold Range阀值范围,为一包含两个数组元素的簇,常用于灰度或色彩图像阀值处理模块中。
1.6 Convolution Kernel二维浮点数组成的数组,用于构造一些算法的算子。
1.7 Morphology Operation形态算法的选择。
可以选择不同的数据处理方式。
1.8 Structuring Element结构元素,为二维的整数数组。
2 Machine Vision controls机器视觉中用到的一些控件,只要是对图像画面进行选择的一些工具,包括点,线和面的选择以及坐标系的设定。
LabVIEW中的机器视觉像识别与跟踪
LabVIEW中的机器视觉像识别与跟踪机器视觉在当今的工业自动化领域中扮演着至关重要的角色,而LabVIEW作为一种功能强大且灵活的开发环境,为实现机器视觉应用提供了便利。
本文将探讨LabVIEW中的机器视觉像识别与跟踪的应用。
一、LabVIEW简介LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench)是一种基于图形化编程的开发环境,由美国国家仪器公司(National Instruments)开发。
该开发环境以其简单直观的使用方式和强大的功能而受到广泛欢迎。
LabVIEW适用于多种领域的应用,包括测试、测量、控制以及机器视觉等。
二、机器视觉像识别与跟踪的基本概念机器视觉像识别与跟踪(Machine Vision Object Recognition and Tracking)是指利用计算机和摄像设备等技术手段,对图像进行处理和分析,实现在不同场景下对特定对象进行识别和追踪的过程。
在工业自动化领域中,机器视觉像识别与跟踪广泛应用于产品检测、品质控制、自动导航等方面。
三、LabVIEW中的机器视觉工具LabVIEW为开发机器视觉应用提供了丰富的工具和函数库,使得像识别与跟踪的实现变得相对简单。
以下将介绍LabVIEW中几个重要的机器视觉工具。
1. 相机接口与图像采集LabVIEW提供了与相机接口的集成,通过相机可以获取实时的图像数据。
用户可以选择合适的相机,并利用LabVIEW的图像采集功能,将图像数据传输到计算机进行后续处理。
2. 图像预处理在进行像识别与跟踪之前,通常需要对图像进行预处理,以提高后续图像处理算法的准确性和效率。
LabVIEW提供了多种图像滤波、增强和几何校正等处理函数,用户可以根据具体需求选择适当的处理方法。
3. 特征提取与描述特征提取是机器视觉像识别与跟踪的关键步骤之一。
LabVIEW中提供了多种特征提取函数,包括边缘检测、角点检测、直线检测等。
LABVIEW基础知识

L A B V I E W基础知识(总3页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除1.LabVIEW包括前面板、程序框图、图标/连接器三部分。
2.框图程序由节点、端点、图框、连线元素构成。
3. 波形图数据输入的基本形式是 _数据数组___、___簇__、_波形数据__。
4. 数据采集简称 DAQ 。
5. 程序结构包括循环结构、分支结构、顺序结构、公式节点。
6.顺序结构分为堆叠、平铺。
7.数组由数据类型、数据索引、数据三部分组成。
8.数据采集系统组成转换器、信号调理、数据采集卡、 PC机、软件9. 图形显示主要控件波形图、波形图表。
11.循环程序结构包括 while 、 for 。
12. 簇包含不同的的数据类型,具有固定的大小。
14.一维数组的数据索引是只有一个索引。
15.For循环有两个固定的数据端子为计数端子、重复端子。
16.波形图可以显示的数据类型是双精度。
17.While循环有两个固定的数据端子重复端子和条件端子。
18.数组中数据元素类型应当是一致的。
19.波形图表显示的图形是被测量物理量的变化趋势。
20.二维数组的数据索引是两个索引(行索引、列索引)。
21.簇框架中添加元素不能同时包含控件和显示件。
22.分支结构选择端子的数据类型必须与选择器标签的数据类型一致。
23.数组的长度在运行时不可以自由改变。
24.局部变量只能在同一个程序内部使用。
25.数据类型的种类数值型、布尔型、字符串型、数组型、簇型、图表型、图形型26.While和for循环的区别和特点区别:While循环只要满足退出的条件则退出相应的循环,否则变成死循环;而for循环是预先确定循环次数,当循环体运行指定的次数后自动退出循环。
特点:当不需要指定循环次数时,使用While循环。
27.移位寄存器的用法作用:使用移位寄存器可以在循环体的循环之间传递数据,其功能是将上一个循环的值传给下一次循环。
[Labview经验]机器视觉系列—— Vision 基础知识上集汇总
![[Labview经验]机器视觉系列—— Vision 基础知识上集汇总](https://img.taocdn.com/s3/m/6a827f1e0912a21615792903.png)
[Labview经验]机器视觉系列——Vision 基础知识上集第1章节(上)1.1 机器视觉简介与硬体介绍1.1.1 前言对于首次接触「机器视觉」的朋友来说,对这个名词肯定有点陌生,所以我们先来简单介绍一下这个专有名词。
「机器视觉」是泛指搭载视觉影像系统的检测设备,影像系统主要是由相机、镜头与光源等光学仪器所建构而成的。
利用这些检测器材广泛地投入各种应用,如产品的瑕疵检测(Inspection)、辨识产品外观(Recognition)与量测产品尺寸(Measurement),而视觉对位(Alignment)与自动化做结合,搭配运动控制或机械手臂,可进行物料的定位与校正,完成手眼协调的视觉伺服系统(Visual Servo System)。
图1.1 - 搭载相机的机器手臂所构成的视觉伺服系统架构机器视觉一直以来都受到相关产业的重视,这边列出几项机械视觉的特色:∙安全性高∙Ÿ具备高解析度∙Ÿ拥有全检能力∙资料重现性好∙可降低人工成本∙可搭配高速运动控制∙可配合运动控制系统进行回馈控制(智慧型自动化)目前使用机器视觉的领域非常广泛,与它相关的热门产业包括半导体、光电、机密工业与製造业等,主要的应用是将这些技术导入产品检测与自动化生产,目的就是为了提升产能、增加良率与减少人员配置。
接着,我们来简单的了解一些与机器视觉相关的专有名词:影像系统(Image System)构成机器视觉最基本架构就是包含相机与镜头的影像系统,最重要的五个基本参数必须先弄清楚:图1.2 - 影像系统的示意图1. 感光元件大小(Sensor Size):相机内部感光元件的尺寸2. 工作距离(Working Distance):相机镜头前缘到物体表面的距离3. 景深(Depth of Field):能维持影像距焦清晰的有效距离4. 视野範围(Field of View):相机所能撷取到物体的实际範围5. 解析度(Resolution):指的是相机拍摄物体可辨识的最小尺寸,解析度越高,检测精度也较好,表示能从影像中获取有用的资讯越多光圈(F)用来表示所控制的光源进入镜头的总量,类似人类的瞳孔,光圈越大,表示能进入的光越多,反之越少。
NI vision详解
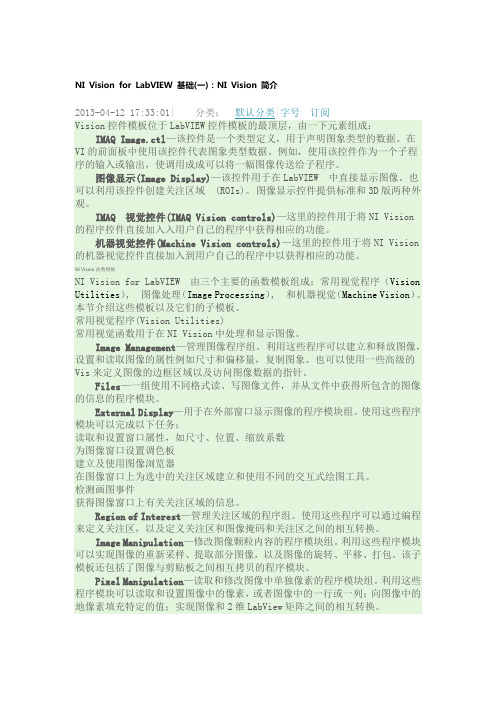
NI Vision for LabVIEW 基础(一):NI Vision 简介2013-04-12 17:33:01| 分类:默认分类|字号订阅Vision控件模板位于LabVIEW控件模板的最顶层,由一下元素组成:IMAQ Image.ctl—该控件是一个类型定义,用于声明图象类型的数据。
在VI的前面板中使用该控件代表图象类型数据。
例如,使用该控件作为一个子程序的输入或输出,使调用成成可以将一幅图像传送给子程序。
图像显示(Image Display)—该控件用于在LabVIEW 中直接显示图像。
也可以利用该控件创建关注区域(ROIs)。
图像显示控件提供标准和3D版两种外观。
IMAQ 视觉控件(IMAQ Vision controls)—这里的控件用于将NI Vision的程序控件直接加入入用户自己的程序中获得相应的功能。
机器视觉控件(Machine Vision controls)—这里的控件用于将NI Vision 的机器视觉控件直接加入到用户自己的程序中以获得相应的功能。
NI Vision 函数模板NI Vision for LabVIEW 由三个主要的函数模板组成:常用视觉程序(Vision Utilities), 图像处理(Image Processing), 和机器视觉(Machine Vision)。
本节介绍这些模板以及它们的子模板。
常用视觉程序(Vision Utilities)常用视觉函数用于在NI Vision中处理和显示图像。
Image Management—管理图像程序组。
利用这些程序可以建立和释放图像,设置和读取图像的属性例如尺寸和偏移量,复制图象。
也可以使用一些高级的Vis来定义图像的边框区域以及访问图像数据的指针。
Files—一组使用不同格式读、写图像文件,并从文件中获得所包含的图像的信息的程序模块。
External Display—用于在外部窗口显示图像的程序模块组。
利用LabVIEW进行运动控制和机器视觉
利用LabVIEW进行运动控制和机器视觉LabVIEW是一款功能强大的图形化编程环境,可用于各种工程和科学应用。
其中,运动控制和机器视觉是LabVIEW的两个重要应用领域。
本文将介绍如何利用LabVIEW进行运动控制和机器视觉的开发,以及相关的技术和方法。
一、LabVIEW运动控制运动控制是一种控制机器或设备进行精确位置和速度控制的技术。
利用LabVIEW进行运动控制可以实现机器人的精确运动、生产线的自动化以及其他众多应用。
1. LabVIEW的运动控制模块LabVIEW提供了运动控制模块,通过该模块可以实现对各种运动设备的控制,包括伺服电机、步进电机、运动控制卡等。
利用该模块,可以轻松地编写程序进行运动控制应用的开发。
2. 运动控制的基本原理运动控制的基本原理是通过对电机施加适当的电流或电压来控制其转动。
LabVIEW通过调节输出信号的强度、频率和方向来实现对电机的控制。
3. 运动控制案例举例来说,我们可以利用LabVIEW实现一个小车的运动控制系统。
通过连接运动控制硬件和编写LabVIEW程序,可以实现对小车的精确控制,包括前进、后退、转弯等功能。
二、LabVIEW机器视觉机器视觉是利用摄像机和图像处理技术对物体进行识别、检测和分析的技术。
LabVIEW具有强大的图像处理功能,可以广泛应用于机器视觉领域。
1. LabVIEW的图像处理工具LabVIEW提供了丰富的图像处理工具,包括图像采集、图像处理、特征提取等功能。
通过这些工具,可以对图像进行处理和分析,实现机器视觉应用的开发。
2. 机器视觉的基本原理机器视觉的基本原理是通过对图像进行分析和处理,提取出有用的特征信息,实现对物体的识别和检测。
LabVIEW通过其图像处理工具包和丰富的函数库,提供了开发机器视觉应用所需的全部功能。
3. 机器视觉案例一个常见的机器视觉应用是自动检测和分类产品。
利用摄像机和LabVIEW的图像处理工具,可以对产品进行拍照,并通过分析图像中的特征进行自动分类和判定。
LabVIEW中的机器视觉和物体识别

LabVIEW中的机器视觉和物体识别LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一款由美国国家仪器公司(National Instruments)开发的图形化编程平台。
作为一种集成了数据采集、信号处理、控制系统以及物理实验等功能的软件系统,LabVIEW在科研、工程实践以及教育领域得到了广泛的应用。
其中,机器视觉和物体识别是LabVIEW提供的强大功能之一。
一、机器视觉在工业自动化中的应用机器视觉是通过图像处理与分析技术实现对物体形状、尺寸、颜色等特征的检测和识别的技术。
在工业自动化中,机器视觉的应用可以大大提高生产效率和质量,并减少人工干预。
LabVIEW提供了一套完善的机器视觉工具箱(Vision Development Module),其中包含了图像采集、预处理、特征提取以及模式识别等功能。
通过使用这些工具,用户可以方便地实现对图像的处理和分析。
二、LabVIEW中的物体识别技术物体识别是机器视觉的重要应用之一。
在工业生产中,对不同物体的自动识别可以帮助机器人或生产设备进行精确定位、判断和处理。
LabVIEW通过图像处理算法和人工智能技术,实现了高效准确的物体识别功能。
在实际应用中,LabVIEW可以通过调用摄像头获取图像信息,并对图像进行处理和分析。
通过使用适当的算法和特征提取技术,LabVIEW可以识别出目标物体,并给出相应的判断结果。
用户可以通过自定义的配置参数,使LabVIEW能够适应不同场景和不同类型的物体识别任务。
三、LabVIEW中的机器视觉开发流程对于使用LabVIEW进行机器视觉和物体识别开发的用户,以下是一个简要的开发流程:1. 图像采集:LabVIEW提供了与摄像头或其他图像采集设备对接的接口,用户可以方便地进行图像数据的获取。
2. 图像预处理:LabVIEW提供了一系列的图像处理函数和工具,用户可以对图像进行滤波、增强、几何变换等操作,以提高后续处理的效果。
LabVIEW与机器视觉实时像处理与分析

LabVIEW与机器视觉实时像处理与分析LabVIEW与机器视觉实时图像处理与分析LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一款基于图形化编程的集成开发环境,广泛应用于工程和科学领域。
机器视觉(Machine Vision)是一门利用计算机视觉技术实现对图像或视频分析的学科。
本文将探讨LabVIEW与机器视觉相结合的实时图像处理与分析的应用。
一、LabVIEW简介LabVIEW是由美国国家仪器公司(National Instruments)开发的一套工程软件,可以进行数据采集、信号处理、控制和测试等多种应用。
其特点是以图形化编程为核心,用户可以通过拖拽图标和连线的方式构建程序,而无需编写繁琐的代码。
二、机器视觉的基本原理机器视觉利用计算机视觉技术对图像或视频进行处理和分析,以实现自动化的视觉检测、测量和控制。
其基本步骤包括图像采集、预处理、特征提取、目标识别和分析等。
三、LabVIEW在机器视觉中的应用1. 图像采集LabVIEW可以与各种图像采集设备(如相机、摄像头等)进行无缝集成,并实时获取图像数据作为处理的输入。
2. 图像预处理LabVIEW提供了丰富的图像处理工具,可以对采集到的图像进行去噪、滤波、边缘检测等预处理操作,以提高后续处理的准确性和效果。
3. 特征提取LabVIEW提供了一系列的特征提取函数和工具,可以从图像中提取出关键的特征信息,如边缘、角点、颜色、纹理等,以进行后续的目标识别和分析。
4. 目标识别LabVIEW可以通过机器学习算法、模板匹配和特征匹配等技术,实现对图像中目标物体的自动识别和定位,从而实现自动化的视觉检测和控制。
5. 图像分析LabVIEW提供了丰富的图像分析工具,可以对图像进行测量、数量统计、形态分析等操作,以获取图像中各种目标的几何参数和统计信息。
6. 实时性能由于LabVIEW是一款实时图像处理平台,可以确保图像处理的实时性能,适用于对图像和视频进行实时监测和分析的应用场景。
[Labview经验]机器视觉系列—— Vision 基础知识下集
![[Labview经验]机器视觉系列—— Vision 基础知识下集](https://img.taocdn.com/s3/m/7b9adb3ecfc789eb172dc8aa.png)
[Labview经验]机器视觉系列——Vision 基础知识下集第1章节(下)rolex cellini replica在上回我们逐一介绍与机器视觉相关的专有名词与周边光学设备,在本回要开始来说明如何使用LabVIEW来截取相机的影像,并正确的显示在人机介面上﹔另外也针对NI Vision所提供的影像校正模式进行说明,以及如何利用软体方式来设定相机的属性与触发取像模式。
audemars piguet royal oak offshore chrono auto replica1.2 软体截取与显像1.2.1 NI MAX影像装置确认在前面一小节介绍了架设整个影像系统所需要的硬体相关设备,现在要来说明如何在NI MAX找到已安装的相机,并且从相机中取得影像。
当我们打开NI MAX,在「My System--》Devices and Interfaces--》NI-IMAQdx Devices」下,可找寻已安装成功的相机,点选相机后,按下右边画面的上方「Grab」键可进行连续取像,另外红色框选处可以找到一些关于相机的规格与内部参数设定,画面下方有显示影像的基本参数,包括目前影像大小、缩放比例与像素的颜色值,另外下方的tab表单处可以找到一些关于相机的规格与内部参数设定。
replica miu miu tote bags图1.26- 在NI MAX下进行取像作业1.2.2 IMAQ影像截取模式现在要来练习如何使用LabVIEW来取得相机的影像。
如果您过去曾经使用LabVIEW来开发NI相关产品,如DAQ设备等,不难发现LabVIEW在相关套件中都会提供两种开发模式:1. 高阶元件(HL);2. 低阶元件(LL),同样地在IMAQ套件裡也存在这两种开发模式。
高低阶模式并不是将元件区分为高低等级,所谓的高阶元件主要是将资源开启、撷取、关闭全包装成一个Express VI,可以帮助使用者快速地完成取像相关的程式设定,就能直接将影像输出到LabVIEW上;而低阶取像元件将功能切割为数个VI,需由使用者自行设定元件才能完成取像动作,好处在于能够让使用者更有弹性的唿叫参数设定,而另一个优点在于,与高阶元件相比,少了反覆建立与关闭资源的动作,可以有效降低系统资源浪费。
[Labview经验]机器视觉系列——Vision基础知识上集汇总
![[Labview经验]机器视觉系列——Vision基础知识上集汇总](https://img.taocdn.com/s3/m/9101e0b8561252d381eb6ebf.png)
[Labview经验]机器视觉系列——Vision 基础知识上集第1章节(上)1.1 机器视觉简介与硬体介绍1.1.1 前言对于首次接触「机器视觉」的朋友来说,对这个名词肯定有点陌生,所以我们先来简单介绍一下这个专有名词。
「机器视觉」是泛指搭载视觉影像系统的检测设备,影像系统主要是由相机、镜头与光源等光学仪器所建构而成的。
利用这些检测器材广泛地投入各种应用,如产品的瑕疵检测(Inspection)、辨识产品外观(Recognition)与量测产品尺寸(Measurement),而视觉对位(Alignment)与自动化做结合,搭配运动控制或机械手臂,可进行物料的定位与校正,完成手眼协调的视觉伺服系统(Visual Servo System)。
图1.1 - 搭载相机的机器手臂所构成的视觉伺服系统架构机器视觉一直以来都受到相关产业的重视,这边列出几项机械视觉的特色:安全性高?具备高解析度?拥有全检能力资料重现性好可降低人工成本可搭配高速运动控制可配合运动控制系统进行回馈控制(智慧型自动化)目前使用机器视觉的领域非常广泛,与它相关的热门产业包括半导体、光电、机密工业与製造业等,主要的应用是将这些技术导入产品检测与自动化生产,目的就是为了提升产能、增加良率与减少人员配置。
接着,我们来简单的了解一些与机器视觉相关的专有名词:影像系统(Image System)构成机器视觉最基本架构就是包含相机与镜头的影像系统,最重要的五个基本参数必须先弄清楚:图1.2 - 影像系统的示意图1. 感光元件大小(Sensor Size):相机内部感光元件的尺寸2. 工作距离(Working Distance):相机镜头前缘到物体表面的距离3. 景深(Depth of Field):能维持影像距焦清晰的有效距离4. 视野範围(Field of View):相机所能撷取到物体的实际範围5. 解析度(Resolution):指的是相机拍摄物体可辨识的最小尺寸,解析度越高,检测精度也较好,表示能从影像中获取有用的资讯越多光圈(F)用来表示所控制的光源进入镜头的总量,类似人类的瞳孔,光圈越大,表示能进入的光越多,反之越少。
LabVIEW中的机器视觉与目标识别
LabVIEW中的机器视觉与目标识别1. 引言机器视觉是一门涵盖图像处理、模式识别和人工智能等领域的技术,它在现代工业、农业、医疗、安防等众多领域中起着重要的作用。
而在应用机器视觉的过程中,目标识别是其中的核心任务之一。
LabVIEW作为一款流程编程语言和开发环境,为机器视觉与目标识别提供了强大的支持。
本文将介绍LabVIEW中的机器视觉相关工具和技术。
2. LabVIEW图像处理工具LabVIEW提供了丰富的图像处理工具,包括图像增强、滤波、边缘检测等功能。
这些工具可以对图像进行预处理,以便更好地进行目标识别。
此外,LabVIEW还支持图像的基本操作,如裁剪、旋转和缩放,方便用户根据需要对图像进行处理。
3. 特征提取与描述在目标识别中,特征提取是一个重要的步骤。
LabVIEW通过提供多种特征提取算法,如色彩直方图、纹理特征和形状特征等,帮助用户从图像中提取出有用的特征。
此外,LabVIEW还支持特征描述算法,如SIFT、SURF等,以提高目标识别的准确性和鲁棒性。
4. 目标检测与分类LabVIEW中的机器视觉模块提供了多种目标检测与分类算法,如Haar特征检测、HOG+SVM等。
这些算法可以帮助用户在图像中快速准确地找到感兴趣的目标,并将其分类为特定的类别。
通过选择合适的算法和参数,用户可以根据不同应用场景实现目标的自动检测与分类。
5. 实时运行与硬件支持LabVIEW是一个实时运行的开发环境,适用于嵌入式视觉应用。
用户可以将开发的机器视觉程序实时部署到硬件设备上,以实现对实时图像数据的处理和分析。
此外,LabVIEW还支持多种摄像头和传感器设备,如USB摄像头、工业相机等,为用户提供了丰富的硬件支持。
6. 应用案例LabVIEW中的机器视觉与目标识别技术已经在多个领域得到了广泛的应用。
例如,在工业自动化中,LabVIEW可以通过识别产品缺陷实现质量控制;在农业领域,LabVIEW可以通过图像处理和目标识别,实现对农作物的病虫害检测;在医疗行业,LabVIEW可以通过人脸检测和识别,实现病人身份的自动识别等。
机器视觉基础知识详解
机器视觉基础知识详解随着工业4.0时代的到来,机器视觉在智能制造业领域的作用越来越重要,为了能让更多用户获取机器视觉的相关基础知识,包括机器视觉技术是如何工作的、它为什么是实现流程自动化和质量改进的正确选择等。
小编为你准备了这篇机器视觉入门学习资料。
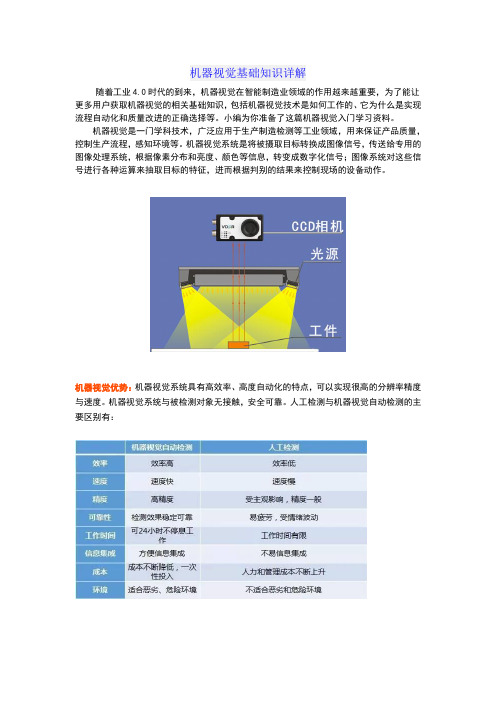
机器视觉是一门学科技术,广泛应用于生产制造检测等工业领域,用来保证产品质量,控制生产流程,感知环境等。
机器视觉系统是将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
机器视觉优势:机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度与速度。
机器视觉系统与被检测对象无接触,安全可靠。
人工检测与机器视觉自动检测的主要区别有:为了更好地理解机器视觉,下面,我们来介绍在具体应用中的几种案例。
案例一:机器人+视觉自动上下料定位的应用:现场有两个振动盘,振动盘1作用是把玩偶振动到振动盘2中,振动盘2作用是把玩偶从反面振动为正面。
该应用采用了深圳视觉龙公司VD200视觉定位系统,该系统通过判断玩偶正反面,把玩偶处于正面的坐标值通过串口发送给机器人,机器人收到坐标后运动抓取产品,当振动盘中有很多玩偶处于反面时,VD200视觉定位系统需判断反面玩偶数量,当反面玩偶数量过多时,VD200视觉系统发送指令给振动盘2把反面玩偶振成正面。
该定位系统通过玩偶表面的小孔来判断玩偶是否处于正面,计算出玩偶中心点坐标,发送给机器人。
通过VD200视觉定位系统实现自动上料,大大减少人工成本,大幅提高生产效率。
案例二:视觉检测在电子元件的应用:此产品为电子产品的按钮部件,产品来料为料带模式,料带上面为双排产品。
通过对每个元器件定位后,使用斑点工具检测产品固定区域的灰度值,来判断此区域有无缺胶情况。
该应用采用了深圳视觉龙公司的DragonVision视觉系统方案,使用两个相机及光源配合机械设备,达到每次检测双面8个产品,每分钟检测大约1500个。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[Labview经验]机器视觉系列——Vision 基础知识下集第1章节(下)rolex cellini replica在上回我们逐一介绍与机器视觉相关的专有名词与周边光学设备,在本回要开始来说明如何使用LabVIEW来截取相机的影像,并正确的显示在人机介面上﹔另外也针对NI Vision所提供的影像校正模式进行说明,以及如何利用软体方式来设定相机的属性与触发取像模式。
audemars piguet royal oak offshore chrono auto replica1.2 软体截取与显像1.2.1 NI MAX影像装置确认在前面一小节介绍了架设整个影像系统所需要的硬体相关设备,现在要来说明如何在NI MAX找到已安装的相机,并且从相机中取得影像。
当我们打开NI MAX,在「My System--》Devices and Interfaces--》NI-IMAQdx Devices」下,可找寻已安装成功的相机,点选相机后,按下右边画面的上方「Grab」键可进行连续取像,另外红色框选处可以找到一些关于相机的规格与内部参数设定,画面下方有显示影像的基本参数,包括目前影像大小、缩放比例与像素的颜色值,另外下方的tab表单处可以找到一些关于相机的规格与内部参数设定。
replica miu miu tote bags图1.26- 在NI MAX下进行取像作业1.2.2 IMAQ影像截取模式现在要来练习如何使用LabVIEW来取得相机的影像。
如果您过去曾经使用LabVIEW来开发NI相关产品,如DAQ设备等,不难发现LabVIEW在相关套件中都会提供两种开发模式:1. 高阶元件(HL);2. 低阶元件(LL),同样地在IMAQ套件裡也存在这两种开发模式。
高低阶模式并不是将元件区分为高低等级,所谓的高阶元件主要是将资源开启、撷取、关闭全包装成一个Express VI,可以帮助使用者快速地完成取像相关的程式设定,就能直接将影像输出到LabVIEW上;而低阶取像元件将功能切割为数个VI,需由使用者自行设定元件才能完成取像动作,好处在于能够让使用者更有弹性的唿叫参数设定,而另一个优点在于,与高阶元件相比,少了反覆建立与关闭资源的动作,可以有效降低系统资源浪费。
高阶(HL)取像元件使用步骤安装完LabVIEW的IMAQ套件后,可在Block Diagram(简称BD)下,按下右键跳出Function Template后依序往下搜寻「Function Template --》 Vision and Motion --》 Vision Express --》Vision Acquisition」(图1.27),将「Vision Acquisition」元件拉到BD上,会自动启动设定画面。
图1.27- Vision Acquisition元件位置A. 设定的取像来源(Select Acquisition Source)左侧「Acquisition Sources for Localhost」可以检视目前安装在电脑上所有相机名称,选择位于「NI-IMAQdx Devices」的相机「cam0:Balsler …」,为本次取像用的相机,接着可以按下右方连续取像按键,测试相机是否有正常被Initialize并取到像;右下角有提供一些关于相机的基础数值(参考图1.2.2)。
图1.28- 设定的取像来源B. 设定撷取影像操作方式(Select Acquisition Type)共分成4种类型:•取单张影像(Single Acquisition with processing)•连续取像(Continuous Acquisition with inline process)•一次取固定张数影像,边取像边做处理(Finite Acquisition with inline processing)•一次取固定张数影像,当所有影像取得完毕后再做处理(Finite Acquisition with post processing)图1.29- 设定撷取影像操作方式这个项目我们先选择「连续取像」模式,继续往下设定。
C. 设定取像参数「Configure Acquisition Settings」可依据环境因素来调整相机的参数达到最佳化,如增益值(Gain)、Gamma、取像模式等,设定过程可以同时按下右上方的「Test」键来观察设定结果,这边我们暂时不做任何需要设定,直接往下一步。
图1.30- 设定取像参数D. 设定是否将影像储存到硬碟(Configure Image Logging Settings)若将「Enable Image Logging」勾选,表示将撷取到的影像储存到下方指定的资料夹位置,并可设定储存的影像格式,值得注意的是,若开启此功能可能因为硬碟存取速度的关係,使得最大取像速度降低。
图1.31- 设定是否将影像储存到硬碟E. 设定影像参数输入与输出「Select Controls/Indicators」可依据应用,开放影像参数供外部控制元件(Control)设定,让该取像用的Express VI获得输入与输出的功能,在此我们勾选显示元件(Indicator)中的「Image Number」与「Frame Rate」,最后按下「Finish」键完成设定。
图1.32- 设定影像参数输入与输出图1.33- HL取像元件自动产生的程式码图1.34- HL取像元件自动产生的人机介面低阶(LL)取像元件使用步骤操作之前我们先来了解「NI-IMAQ」与「NI-IMAQdx」两者的差异;「NI-IMAQ」一般只能用于NI的影像撷取卡或相机,而「NI-IMAQdx」是可驱动第叁方的相机,如Basler的USB3.0相机,凡是通过影像传输介面协定联盟(如GigE、Camera Link或USB3.0)认证的相机,都可使用「NI-IMAQdx」来驱动。
使用低阶取像元件来驱动第叁方相机时,需同时使用到「NI-IMAQdx」与「NI-IMAQ」影像模组;主要是利用「IMAQdx」来撷取相机的影像,然后再利用「IMAQ」创立的影像空间来储存影像,「IMAQ」同时还提供影像处理工具及机器视觉工具,可依据使用者需求来做应用开发。
利用LL元件来完成连续取像的功能,操作流程图如下:图1.35- 使用IMAQdx与IMAQ取像流程图先在Front Panel建立一个「IMAQdx Session」与「Image Display」,物件分别位于「Control Template --》 Modern --》 I/O --》IMAQdx Session」与「Controls Template --》 Vision --》 Image Display」,最后再放置一个Boolean,名称设为「Stop」。
图1.36- Image Display物件放置区域跳到Block Diagram,分别在「Function Template --》 Vision and Motion --》 NI-IMAQdx --》 Low-Level」与「Function Template --》 Vision and Motion --》 Vision Utilities --》 Image Management」找到以下几个功能VI:图1.37- IMAQ Create与Dispose物件图1.38- IMAQdx的设定取像物件将这几个功能VI依照操作流程步骤完成,程式码如下:图1.39- Low Level取像元件程式码步骤说明:1. 指定开启相机名称,从「IMAQ Session」中选择对应的相机名称2. 设定相机取像模式为「连续」,Image Buffer设为「3」3. 开始取像4. 任何由外部取得的影像,都需透过IMAQ建立一组记忆体空间来储存,由于取像来源是彩色相机,每一张彩色(RGB)影像需要3*8bit的空间来储存,所以「Image Type」要选择「RGB U32」5. 进入While迴圈后,会不断将影像覆盖到记忆体区内,此时将影像接到Display Image即可在人机介面观察到影像,直到按下「Stop」或Error产生时才会跳出迴圈6. 停止取像7. 解除相机设定8. 结束指定名称的相机作业9. 清空储存影像的记忆体空间最后再转换画面到FP,启动程式后就会开始连续取像,直到有人按下人机上的「Stop」键,停止取像。
使用上述两种开发模式都可以成功将相机的影像撷取到LabVIEW,有了这些影像来源(Image Source)后,就可以再继续往下做影像后处理(Image Process)与机器视觉(Machine Vision)的应用了。
1.2.3 影像软体校正确认影像系统能正常取像后,首先要做的是对整个影像系统做校正,为何还要多此一举呢?主要塬因有两点:1. 真实世界描述物体的单位可能是吋(inch)或公厘(mm),但在影像系统裡,描述影像的是像素(pixel),这两者之间必须存在一单位转换公式,影像才有办法转换成真实比例,对于尺寸量测或视觉对位类型的应用特别重要。
2. 前面章节曾提到视觉系统可能因为镜头的失真(Distortion),或者因为相机投射方向与检测物表面非完全垂直,这两种情况都会造成影像变形,需透过影像校正来修正这些变形量。
在NI VISION(IMAQ)有提供以下几种校正模型,主要目的在于单位转换与修正变形量:图1.40- NI VISON提供的校正模型1. Point Distance Calibration:在影像变形量轻微且忽略不计下,利用真实世界两点距离与像素之间做单位转换2. Point Coordinates Calibration:已知真实世界点位置座标与影像中的像素座标做对应,用来修正非垂直透视投影所产生的变形3. Distortion Model (Grid):利用相机拍摄一张格点校正片的影像,可同时修正镜头失真与非垂直透视投影所造成的失真4. Camera Model (Grid):利用多张格点影像进行相机模型校正,包括焦距、影中心点与影像失真,一般常用于机械手臂定位应用5. Microplanes (Grid):修正在非平整的工作表面所造成的影像失真1.3 相机的属性与触发模式设定1.3.1 相机属性说明了解如何透过LabVIEW来取得影像后,另外可针对相机的部分属性进行参数的微调,一些常用的参数有:1. Analog Controls• Gain Auto:可设定自动或手动增益• Gain(Raw):设定增益值,会直接影响黑跟白的对比,调高Gain 值,不仅会强化影像的对比强度,同时也会将杂讯的放大2. Image Format Controls• Image Format Controls:若使用的是彩色相机,可将影像设为灰阶(Mono)或彩色格式(Color)﹔若使用的是黑白相机,则只能设定灰阶影像输出3. Acquisition Controls• Trigger Mode:开启或关闭触发功能• Trigger Source:可选择软体触发(Software)或者硬体触发(Line)• Generate Software Trigger:当触发模式设定为Software时,执行相机后,每按一下取一张影像• Exposure Auto:开启/关闭自动曝光,一般都设定为关闭• Exposure Mode:可设定固定曝光时间(Timed)模式,或者是脉衝宽度(Trigger Width)模式,由触发讯号的脉衝持续时间的来决定曝光时间• Exposure Time:设定固定曝光时间,曝光时间越长,画面亮度会有所提升,曝光时间如果拉得太长会产生过曝,如果遇到晃动也容易产生残影1.3.2 触发模式说明硬体触发(Line):一般工业相机都会提供数组硬体触发讯号(Line),可以接收来自外部IO卡的讯号,当相机收到触发后,立即撷取一张影像,常使用在高速影像撷取或Line Scan的应用。