粒子图像测速仪教学文案
粒子机器视频讲解课程设计
粒子机器视频讲解课程设计一、课程目标知识目标:1. 让学生理解粒子的基本概念,掌握粒子的性质和分类。
2. 通过视频讲解,让学生了解粒子机器的工作原理及其在现实生活中的应用。
3. 使学生掌握相关科学术语,并能运用术语描述粒子机器的运作过程。
技能目标:1. 培养学生观察、分析、解决问题的能力,能运用所学知识解释粒子现象。
2. 培养学生运用信息技术手段获取信息、整理信息的能力,通过观看视频,提炼关键信息,进行深入学习。
3. 培养学生的团队合作能力,学会在小组讨论中发表见解,倾听他人意见,共同完成任务。
情感态度价值观目标:1. 激发学生对科学的兴趣,培养科学探究精神,养成积极的学习态度。
2. 培养学生的环保意识,认识到粒子技术在环境保护方面的重要性。
3. 增强学生的国家认同感,了解我国在粒子技术领域的发展现状和成就。
课程性质:本课程为科学探究课程,旨在通过视频讲解,帮助学生掌握粒子机器的基本知识,培养科学素养。
学生特点:五年级学生对新鲜事物充满好奇,具备一定的观察和思考能力,但可能对抽象的科学概念理解有限。
教学要求:结合学生特点,以生动形象的视频讲解为主,结合实际案例,引导学生主动参与,提高学生的实践操作能力和探究精神。
在教学过程中,关注学生的学习反馈,及时调整教学策略,确保课程目标的实现。
将目标分解为具体的学习成果,便于后续的教学设计和评估。
二、教学内容1. 粒子基本概念:粒子的定义、性质、分类及其在自然界中的存在形式。
2. 粒子机器原理:介绍粒子机器的工作原理,包括粒子加速器、粒子探测器等关键设备的功能和作用。
3. 粒子机器应用:分析粒子机器在医学、环保、科研等领域的实际应用,以案例形式展示其重要作用。
4. 科学探究方法:学习科学探究的基本方法,培养学生观察、分析、解决问题的能力。
5. 环保意识培养:通过讲解粒子技术在环境保护方面的应用,引导学生树立环保意识。
教学内容安排与进度:第一课时:粒子基本概念的学习,了解粒子的性质和分类。
粒子影像测速技术概述
粒子影像测速技术概述粒子影像测速(Particle Image Velocimetry,PIV)技术是一种非侵入式流体力学测量方法,用于研究流体的运动和流场。
该技术通过在流体中悬浮微小颗粒,并利用激光照射和相机拍摄的方式,获得颗粒在不同时间间隔内的位置信息,从而推导出流体的速度场。
PIV技术的基本原理是利用流体中的颗粒作为标记物,在连续拍摄的图像序列中跟踪颗粒的运动轨迹,从而得到流体速度场的空间分布情况。
其中,激光光束被用来照射流体中的颗粒,通过相机拍摄颗粒图像,并计算相邻两幅图像中颗粒位置的变化,从而计算颗粒的位移和速度。
PIV技术的实施过程主要包括以下几个步骤:1.准备实验环境:选择合适的流场实验装置和流体介质,并在流体中悬浮微小颗粒,以便在图像中能够清晰地观察到颗粒的运动轨迹。
2.激光照射:通过激光光源照射流体,形成一个平面光束,并在流体中的颗粒上产生散射,从而在图像中形成明亮的颗粒光斑。
3.图像拍摄:使用高速相机或摄像机对照明的颗粒图像进行连续拍摄,并以一定的时间间隔记录图像序列。
4.图像处理:对连续的图像序列进行处理,包括背景校正、图像配准、颗粒定位等步骤,以获得颗粒位置信息。
5.数据分析:通过比较颗粒在不同时间间隔内的位置信息,计算颗粒的位移和速度,并进一步推导出整个流体区域的速度场分布。
PIV技术的优点在于它能够提供全场的速度信息,而不仅仅是单点或线性的数据。
这使得PIV技术在研究流体湍流、气动性能以及流体工程等领域具有广泛的应用。
同时,PIV技术还可以与其他测量技术相结合,如激光雷达、压力传感器等,以提供更加全面和准确的流体力学数据。
然而,PIV技术也存在一些局限性。
首先,要求流体中应有足够数量和密度的微小颗粒,以便在图像中清晰可见,这对于一些实验环境下的流体可能是困难的。
其次,由于颗粒在流体中的多次散射,会造成颗粒在一些位置上的位置模糊,从而影响速度计算的准确性。
总的来说,粒子影像测速(PIV)技术作为一种先进的非侵入式流体力学测量方法,具有高时空分辨率、全场测量等优点,被广泛应用于航空航天、水力学、气动学等领域的流体力学研究。
三维粒子图像测速
互相关数值实验
乘法互相关公式:
NN
C(X,Y) f1(Xi,Yj)f2(XiX,YjY) i1j1
乘法互相关相关谱:
x 106 3
2.5
2
1.5
1 10
5
10
5
0
-5
0
-5
-10 -10
减法互相关公式:
NN
C ( X , Y) f1(X i,Y j)f2(X i X ,Y j Y) i 1j 1
二维到三维的信息丢失
左图为三维空间粒子场的动画
从三维空间粒子场的动 画中看到各种角度下三 维空间粒子场的二维度 结构形态
层析ART重构数值模拟实验
左图用于层析重构的成像模型。在个顶 视成像平面里展示了,像素单元线,测 量空间是二维体素阵列。灰度水平表示 出对应于像素 的权重系数 的值
下面是数值实验的结果
2.从湍流研究看:湍流具有非定常、三维和非线性等特征,增加了 湍流实验观测的难度,所以开展对湍流场的实验测量方法和技术的研 究,来进一步了解湍流的发展演化机理是非常必要和迫切的。PIV等流 动显示和测量技术近年来得到了迅速发展,但是针对三维性、非定常 等湍流特征,现代技术还没有完全解决,需要新的更有效方法来从机 理上分析湍流中流动结构及其形成原因,因此,这方面的研究已成为 湍流研究的前沿课题。开展新的流体力学实验测量手段—基于多相机 的瞬态三维激光层析测量关键技术的研究,包括多相机流场测量的标 定技术和速度重构算法。
左,右下图说明:原图是一个大格子的黑白间隔图,我们把它视为三维空间里的一个水平截面 重构图就是对原图的还原,可以把黑色格子看成是粒子(相对来说是非常非常的粒子),重构 后,可以看出,黑色格子—粒子的图像周边变得模糊,黑色粒子重构后有了“影子”
piv(粒子图像测速仪)操作使用手册
PIV操作使用手册一、注意事项(使用前必看)1.操作一定要按规定的方法执行。
2.激光开启时,人眼绝对不能看激光源。
3.用相机标定时,需要拆下滤光镜,不能打开激光器;实验时,打开激光器前,必须盖上相机镜头盖。
4.相机不能长时间连接电源,实验完成后一定要将电源线拔掉。
5.激光器必须每周至少使用一次,否则性能下降。
6.实验时,实验台不容许有多于3个人停留。
二、开机步骤先检查线路连接是否正确,然后打开所有仪器的电源(包括相机、激光器、移动架和计算机)。
开启计算机,启动DynamicStudio操作软件。
三、标定步骤采用三维标定靶标定1.运行DynamicStudio软件,新建一个Database并切换到采集模式,在System Control中,点击“Free Run”模式调整两个相机,使标定靶在两个相机拍摄区域的中间位置(注意此时需使标定靶大概在片光平面内调整)。
2.点击“stop”关闭相机,并盖上相机盖,打开激光,激光强度要弱,使用标定靶确定准确的片光平面。
3.标定靶不动,将激光关闭(用激光控制面板),打开相机盖。
4.选择Single Frame Mode单帧拍摄模式,采集图片数量输入1,点击Acquire采集图片,选择Do Not Start(此时激光器处于关闭状态),切换到Acquired Data栏,点击Save for Calibration,把数据存为标定数据,确保拍到图片中心及四周都很清楚(调节相机焦距);然后分别向前或向后移动坐标靶,对称的采集几个位置(一般6个就可以,步骤如粗体字所示)。
5.采集并存储完成后,点击采集按钮回到Database模式。
右键点击Calibration里面的FlowSenseEO 4M#1,选择Calibrate...,进去后选择Calibrations,选择Multi Camera Calibration,点OK。
进去后观察绿色网格是否充满整个标定纸,如果没有充满需重新标定(返回第4步),如果充满,点击OK,此时图片下方出现Multi Calibration。
粒子图像测速技术

热灾害实验技术粒子图像测速技术实验目的:测量流场的速度分布实验装置:摄像头,片光源,计算机实验原理与方法:互相关算法:根据DPIV 互相关算法理论,过一采样窗口,同一特定位置,可顺序获取两幅数字图像。
粒子的位移可从一幅图像到另一幅相对应的图像经互相关计算获得。
两幅顺序获取图像中相同位置的两个查问窗口函数 f(m ,n)和g(m ,n),从信号系统的观点出发,g(m ,n)可以看作是f(m ,n)经线性转换后叠加以噪声而成,如图所示。
1、预先在流场中撒入一定浓度和大小的示踪粒子,用脉冲激光片光源照明二维流场,在垂直片光的方向上摄像,获得两次或者多次曝光的粒子图像。
2、对采取的图像使用Photoshop进行处理使之变成长宽为256x256的灰度图像,使用matlab和互相关算法编程,对图像进行处理,得到二维流场中速度矢量分布图。
实验结果:隔两帧得到的灰度图:得到速度矢量图如图所示:得到速度矢量图如图所示:源程序:function [XNum,YNum,AutoFlag]=g(a1,a2,OutFile) fid1=fopen('a1.jpg','r');fid2=fopen('a2.jpg','r');fid3=fopen('OutFile.jpg','w');XL=256;YL=256;frewind(fid1);Image1=fread(fid1,[XL,YL]);frewind(fid2);Image2=fread(fid2,[XL,YL]);WinSizeX=64;WinSizeY=64;DeltaX=16;DeltaY=16;XNum = (XL-WinSizeX)/DeltaX;YNum = (YL-WinSizeY)/DeltaY;a=3.4968e+006 +4.7425e-010i;frewind(fid3);for j1=1:YNum+1;for i1=1:XNum+1;CorrWin1=Image1((i1-1)*DeltaX+1:(i1-1)*DeltaX+WinSizeX,(j1-1)*Del taY+1:(j1-1)*DeltaY+WinSizeY);CorrWin2=Image2((i1-1)*DeltaX+1:(i1-1)*DeltaX+WinSizeX,(j1-1)*Del taY+1:(j1-1)*DeltaY+WinSizeY);F1=fft2(CorrWin1);F2=fft2(CorrWin2);S=F2.*conj(F1);Pks=ifft2(S);Pks=fftshift(Pks);Pks=Pks/a;if (i1==2)SURF(abs(Pks));pauseend[temp1,maxx]=max(Pks);[temp2,maxy]=max(temp1);if temp2==0.0 || abs(maxx(maxy)-WinSizeX/2-1)> WinSizeX/3.0 || abs(maxy-WinSizeY/2-1)>WinSizeY/3.0VX(i1,j1)=0;VY(i1,j1)=0;Corr(i1,j1)=0;elseTX=maxx(maxy);TY=maxy;Corr(i1,j1)=temp2;%---------用高斯拟合峰值的精确位置-----------y0=Pks(TX-1,TY); %横向y1=Pks(TX,TY);y2=Pks(TX+1,TY);CX1=(y0-y2)/(2.0*(y0+y2-2.0*y1));y0=Pks(TX,TY-1); %纵向y1=Pks(TX,TY);y2=Pks(TX,TY+1);CY1=(y0-y2)/(2.0*(y0+y2-2.0*y1));y0=Pks(TX-1,TY-1); %第一对角线y1=Pks(TX,TY);y2=Pks(TX+1,TY+1);CX2=(y0-y2)/(2.828*(y0+y2-2.0*y1));CY2=(y0-y2)/(2.828*(y0+y2-2.0*y1));y0=Pks(TX+1,TY-1); %第二对角线y1=Pks(TX,TY);y2=Pks(TX-1,TY+1);CX3=-(y0-y2)/(2.828*(y0+y2-2.0*y1));CY3=(y0-y2)/(2.828*(y0+y2-2.0*y1));%--------------------------------------------------VX(i1,j1)=TX+CX1+CX2+CX3-WinSizeX/2-1;VY(i1,j1)=TY+CY1+CY2+CY3-WinSizeY/2-1;endX(i1,j1)=WinSizeX/2+(i1-1)*DeltaX;Y(i1,j1)=WinSizeY/2+(j1-1)*DeltaY;%if(abs(Corr(i1,j1))>abs(a))% a=Corr(i1,j1);%end;fprintf(fid3,'%8.2f,%8.2f,%12.6f,%12.6f,%8.2f\n',X(i1,j1),Y(i1,j1 ),VX(i1,j1),VY(i1,j1),Corr(i1,j1));end%j1end%aquiver(X,Y,VX,VY);fclose(fid1);fclose(fid2);fclose(fid3);cx=5;cy=5;sigma=0;for j1=1:YNum+1,for i1=1:XNum+1,sx=cx*abs(VX(i1,j1)-cx)/(cx*cx+cy*cy);sy=cy*abs(VY(i1,j1)-cy)/(cx*cx+cy*cy);sigma=sigma+sqrt(sx*sx+sy*sy);endendsigma=sigma*100/((XNum+1)*(YNum+1)); %百分比[s,errmsg]=sprintf('sigma=%f\n',sigma);s。
粒子影像测速(PIV)技术概述

粒子影像测速(PIV)技术概述1.PIV技术介绍1.1.引言目前为止,人类对流体力学仍有许多疑难问题,如对湍流、非定常流动等现象了解甚少,而在许多工程应用如飞行器外形设计、内燃机燃烧室中的多相流动等中又迫切需要解决这些问题,因而使流场测量问题变得极为重要。
流场测速新方法研究中,至今已发展了激光多普勒测速LDV(Laser Doppler Velocimetry)、粒子影像测速PIV(Particle Image Velocimetry)等技术。
LDV的综合性能较高,具有高精度、高分辨率和非接触测量等优点,通常作为仪器标校技术使用,但LDV只能实现单点测量。
PIV技术是一种全场、动态、非接触测量手段,已获得广泛使用,成功应用于风洞、水洞、水槽燃烧及喷射等实验中。
PIV研究始于上个世纪80年代,随着光学和计算机图像处理技术的迅猛发展,PIV取得了长足进步,测量精度已与LDV接近。
1.2.PIV原理图1是PIV 技术应用的简单原理图。
散播在流场中的跟随性及反光性良好的示踪粒子,由激光光束首先入射到一组球面透镜上,经聚焦后通过全反射镜至一组可调的柱面透镜形成具有一定厚度的片光,照亮流场中特定的区域,此时经过此区域的示踪粒子被照亮,通过CCD(CMOS)成像设备进行成像。
对这个特定的区域在一定时间间隔内利用图1 PIV简单原理图激光脉冲连续照亮两次,就能得到粒子在第一次照亮时间t 和第二次照亮时间t’的两个图像,对这两幅图像进行互相关分析,就能得到流场内部的二维速度矢量分布。
在利用PIV 技术测量流速时,需要在二维流场中均匀散布跟随性、反光性良好且比重与流体相当的示踪粒子。
将激光器产生的光束经透镜散射后形成厚度约1 mm 的片光源入射到流场待测区域,CCD 摄像机以垂直片光源的方向对准该区域。
利用示踪粒子对光的散射作用,记录下两次脉冲激光曝光时粒子的图像,形成两幅PIV 底片(即一对相同待测区域、不同时刻的图片) ,底片上记录的是整个待测区域的粒子图像。
粒子图像测速技术的研究与应用

粒子图像测速技术的研究与应用随着科技的发展,测量粒子和流体速度的需求越来越多,而粒子图像测速技术(Particle Image Velocimetry,PIV)作为一种全息、非接触、全场测量流体速度和颗粒运动的高速精密测量方法得到了广泛的应用。
一、粒子图像测速技术的原理和方法PIV技术基于成像法,利用高速摄像机记录流体中荧光微粒的运动图像,并通过处理荧光微粒的运动轨迹获得流体速度分布。
整个测量过程被分为两个步骤:荧光微粒标记和图像处理。
荧光微粒标记可以使用洛伦兹荧光微粒、纳米颗粒或者钴青天然磁性微粒等,这些微粒被注入到流体中并随之运动,拍摄到的图像经过处理后可得到流体速度平均值和方向。
图像处理可以采用相关方法、互相关法、小波变换等不同的算法,通过处理得到流体速度分布、涡量场和剪切应力等大量的物理量,并可以得到不同时间段内的流体运动轨迹等信息。
二、 PIV技术在流体力学和气象学中的应用PIV技术作为一种高速精密测量方法,在流体动力学和气象学领域得到了广泛的应用,具体有以下几个方面。
1. 流体动力学仿真与实验流体动力学是研究流体运动规律、流体力学特性以及流体与固体或流体与液体交互作用的学科。
PIV技术可用于流场定量表征、流体运动分析和涡旋识别等方面,尤其适用于分析颗粒物在流体中的运动行为。
同时,流体动力学仿真也可用PIV技术验证和修正模型。
2. 气象学观测PIV技术可以有效地研究大气速度、潜热通量等气象学参数,对气象、环境、应急预警等领域有着重要的应用价值。
3. 环境污染监测流体动力学方法可用于水流速度、水流压力的测量、以及水中污染物浓度和扩散规律的研究。
PIV技术可以准确地测量水流中的污染物流量、污染物分布情况和扩散规律,为环境污染监测提供了一种全新的手段。
三、 PIV技术的应用展望近年来,人们对PIV技术的应用发展提出了更高要求,需要能够更加精确、快速、实用和多样化地完成测量。
在此基础上,未来可望有以下方向的发展:1. 超高速PIV技术随着科技发展,各个领域对流体速度测量的需求不断增加,比如高速列车、飞行器等高速运动物体,需要测量的速度更高。
粒子图像测速技术.ppt
(a) 气压式粒子发生器原理图
(b) 气压式粒子发生器实物照片
图 3.1 气压式粒子发生器
3.1 超音速喷流试验
(A) 喷流试验光路布置 (B)喷流试验现场设备布置 图3.2 超音速喷流实验
实验照片
△T = 1 微秒
超音速喷流试验结果
Y(mm)
20
15
10
5
10
1520Biblioteka 25 X(mm)图 3.3 超音速速度向量场试验结果
激光片光
图3.12 漩涡分离器测量试验布置图
漩涡分离器试验结果
(a) 漩涡分离器截面等速度场
(b) 漩涡分离器截面等涡量场
图3.13 漩涡分离器试验结果
漩涡分离器试验结果分析
1.2 1.0 0.8 0.6 0.4 0.2
Y
0.0 -0.2 -0.4 -0.6 -0.8 0 20 40
X
60
80
100
体视成像(SPIV)原理
θ
α
图2.14平移机构体视PIV示意图
图2.15角移机构体视PIV示意图
体视成像(SPIV)校准原理
(a)网格校准板 标准图像
(b)左侧相机拍摄的图像 (C)右侧相机拍摄的图像
图 2.16 体视成像(SPIV)图像校准原理
体视三维PIV系统组成
3. DPIV系统的实际应用以及试验成果
2.2 DPIV系统的软件组成
图像辅助工具 图像显示采集
打开图像文件
满足试验要求
互相关 计算
不满足试验要求
保存图像文件
向量修正(人工/自动)
保存向量文件
打开向量文件
向量结果分析
保存分析结果
涡量场,等速线,流线,三维等值图
粒子图像测速系统(PIV)
PIV,全名:Particle Image Velocimetry,简单来说是一种二维的方式显示速度矢量,使流体可视化的一种测量技术。
该方法是七十年代末发展起来的一种瞬态、多点、无接触式的激光流体力学测速方法。
近几十年来得到了不断完善与发展,PIV技术的特点是超出了单点测速技术(如CTA、LDA)的局限性,能在同一瞬态记录下大量空间点上的速度分布信息,并可提供丰富的流场空间结构以及流动特性。
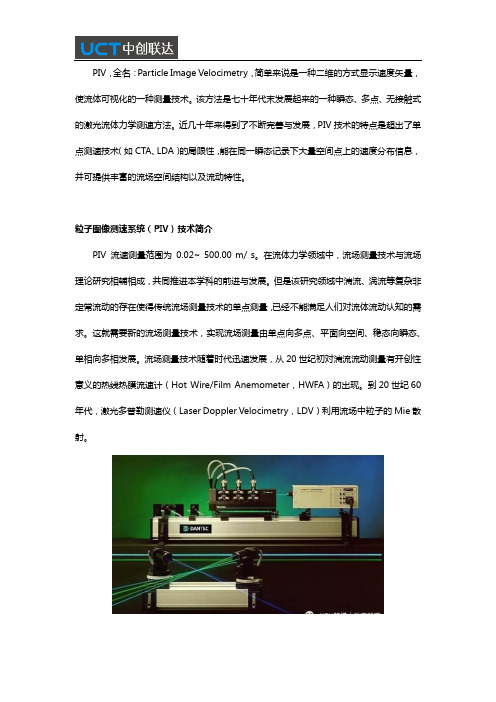
粒子图像测速系统(PIV)技术简介PIV 流速测量范围为0.02~ 500.00 m/ s。
在流体力学领域中,流场测量技术与流场理论研究相辅相成,共同推进本学科的前进与发展。
但是该研究领域中湍流、涡流等复杂非定常流动的存在使得传统流场测量技术的单点测量,已经不能满足人们对流体流动认知的需求。
这就需要新的流场测量技术,实现流场测量由单点向多点、平面向空间、稳态向瞬态、单相向多相发展。
流场测量技术随着时代迅速发展,从20世纪初对湍流流动测量有开创性意义的热线热膜流速计(Hot Wire/Film Anemometer,HWFA)的出现。
到20世纪60年代,激光多普勒测速仪(Laser Doppler Velocimetry,LDV)利用流场中粒子的Mie散射。
实现流场的无接触测量。
再到20世纪80年代,粒子图像测速技术(Particle ImageVelocimetry,PIV)实现了点向面的流场测量。
PIV技术是一种瞬态、多点、无接触式的流体力学(水和空气)测速方法。
可以在同一瞬时记录下大量空间上的速度矢量分布信息,并可以提供丰富的流场空间结构和流动特性。
目前,PIV技术也是在不断的发展,从一个切面发展到一个容积空间、从平面二维速度矢量的二维切片发展到二维切片内三位速度矢量、从瞬间速度场的测量发展到一个连续时间过程内的速度场测量。
粒子图像测速系统(PIV)的基本原理PIV技术的最基本原理是在待测流场中布散示踪粒子,示踪粒子代表流场空间中相应的流体质点,粒子会随着流场运动而运动,使用相机来记录不同时刻下示踪粒子的位置信息,通过计算机的图像处理算法分析相机所拍摄的粒子图片,将示踪粒子的位置信息和时间信息转换为流场流动的速度矢量信息,进而分析出流场的流动结构、涡量场等流动特性。
PIV(粒子图像测速系统)

PIV(粒子图像测速)全名:Particle Image Velocimetry,简单来说是一种二维的方式显示速度矢量,使流体可视化的一种测量技术。
该方法是七十年代末发展起来的一种瞬态、多点、无接触式的激光流体力学测速方法。
近几十年来得到了不断完善与发展,PIV技术的特点是超出了单点测速技术(如CTA、LDA)的局限性,能在同一瞬态记录下大量空间点上的速度分布信息,并可提供丰富的流场空间结构以及流动特性。
PIV技术除向流场散布示踪粒子外,所有测量装置并不介入流场。
另外PIV 技术具有较高的测量精度。
由于PIV技术的上述优点,已成为当今流体力学测量研究中的热门课题,因而日益得到重视。
PIV测速方法有多种分类,无论何种形式的PIV,其速度测量都依赖于散布在流场中的示踪粒子,PIV法测速都是通过测量示踪粒子在已知很短时间间隔内的位移来间接地测量流场的瞬态速度分布。
若示踪粒子有足够高的流动跟随性,示踪粒子的运动就能够真实地反映流场的运动状态。
因此示踪粒子在PIV测速法中非常重要。
在PIV测速技术中,高质量的示踪粒子要求为:(1)比重要尽可能与实验流体相一致;(2)足够小的尺度;(3)形状要尽可能圆且大小分布尽可能均匀;(4)有足够高的光散射效率。
通常在液体实验中使用空心微珠或者金属氧化物颗粒,空气实验中使用烟雾或者粉尘颗粒(超音速测量使用纳米颗粒),微管道实验使用荧光粒子等。
通过使用西华数码影像(日本Seika公司)开发的PIV专用控制和分析软件Koncerto II,就可以完成测量与分析(详情可咨询武汉中创联达科技有限公司,网址:)。
其技术原理为:对在一定空间中的粒子使用片状激光在极短的时间内连续照射两次,并且使用高分辨率相机于继光同时拍摄,取得两个粒子群的图像。
通过PIV专有算法(互相关)分析该图像的同一区域(解析窗口)中的粒子,可以获得表示速度矢量的二维数据。
PIV不仅可以获得二次元的数据(2D2C),还可以通过使用立体拍摄来获得二维三分量(2D3C)数据。
粒子成像测速

在实际的应用中,根据所使用PIV设备参数(激光强度, 照机分辨率等)和测量流场的具体情况,选择适合于 具体问题的示踪粒子来得到较好的图像质量,才能通 过图像后处理,提取出比较精确的测量结果。目前国 内外很多人都对各种不同类型的粒子进行了广泛的研 究,使得各领域流场测试结果更精确,更符合实际流 场情况。根据示踪粒子的不同,应用于空气流中的散 播设备可大致分为三种:一种是用来产生油粒子的, 其核心部件是拉斯金喷(Laskin nozzle);一种是适 用于固体粉末的,利用喷雾器来形成具有均匀粒子的 喷雾;还有一种是用来产生皂泡的系统,皂泡的运用 能够增大观察区域(FOV)。
在目前的实际应用中,PIV已经成功 的应用在很多流场测试中,并取的了重 大的突破。如在风洞试验中的流场测试, 超音速喷流瞬时的流畅测量,船体模型 周围流场分部的测试等等。PIV在研究瞬 态流动中提供了一个强而有力的手段。
1、/share/225371584/3289960 360 2、/zxxw/2013-0615/358.htm l 3、/link?url=Ky61w93DVl1JurKuY4G8nRIC8QSF_gmHxpGeGGhp_bZd7KrO29VsoSE4WGGUe1db6ITbAvPYGsBxAIAykIYyOds05 tYRh6AtSX0kO5e
激光在产生后通过一些光学镜的反 射、折射后,汇集成所需强度的激光束, 这一激光束再通过一些按照一定顺序和 规律排列的光学透镜,最终形成照亮观 察区域的片光。下图为利用透镜形成片 光的原理图。
PIV 的图像记录方式可以分为两大类:单 帧/多曝光PIV( single frame /mu lti - exposure PIV)和多帧/ 单曝光PIV(multi - frame/ s ingle exposure PIV),如图所示。单帧/多曝光PIV 通过在很短的时间内照相,获得明显的流线斑 图,再通过图像处理,就能得到流场信息。但 这种方式仍然存在一些缺陷,在对其进行处理 时比较复杂。相反,随着数字图像Байду номын сангаас录方式的 进步,多帧/单曝光PIV显示出其独特的优势, 在高速甚至高超音速的领域有更好的表现。
粒子图像测速技术与应用
粒子图像测速技术与应用粒子图像测速技术(Particle Image Velocimetry, PIV)是一种非侵入式流场测量技术,其原理是利用高速数字摄像机捕捉流体中由体积或表面轮廓的微粒所组成的图像序列,并通过计算处理来得到流体的速度场信息。
PIV技术的应用范围非常广泛,既可以用于研究天然流体运动现象,又可以用于工业流体力学领域的实验研究,还可以应用于医学、环境、生态等领域的研究。
1. PIV技术原理PIV技术主要基于两帧流场图像的匹配和计算,其中流体中的不透明微粒被认为是运动的跟踪标记。
首先,在被测流场中加入微粒探针,并用高速摄像机记录粒子在不同时刻的位置分布图像序列,然后通过图像处理技术,选定两个特定的时间点,提取出图像中的微粒位置,并进行匹配。
匹配后,根据匹配到的微粒在两个时间点的位置变化,即可得到流体中的速度矢量场分布。
最后,通过计算流体中的不同位置的速度值,得到流量、涡量、剪切应力等流体动力学参数。
2. PIV技术的应用2.1 工业流体力学领域PIV技术广泛应用于工业流体力学领域的实验研究,例如:航空、汽车等领域的气动力学研究。
在飞行器的设计和研发过程中,需要研究其外形对飞行性能的影响,包括气动阻力和升力,而PIV技术可以帮助识别飞行器表面的速度分布,为改善其性能提供参考。
同样,汽车的气动设计也需要通过PIV技术来评估不同外形对车速、空气阻力的影响。
2.2 医学、环境、生态研究PIV技术还可以应用于医学、环境、生态等领域的研究。
例如,PIV技术可以研究心脏壁的运动,进而分析心脏的收缩过程;还可以用于细菌、气溶胶等颗粒的测速和分布分析;在水流环境中,PIV技术可以帮助研究河流和海洋生态系统中的流体运动,以及水动力学问题,如洪水预警、海洋污染控制等方面。
3. PIV技术的优劣虽然PIV技术被广泛应用于流体力学领域中,但PIV技术本身存在一些局限性。
首先,由于流场中粒子的亮度和聚集程度可能受到流体物性、涡旋等因素的影响,粒子图像的质量会受到一定的影响,对测量结果的准确性产生影响。
粒子成像测速
下图是PIV应用的简单原理图。散播在流场 中的跟随性及反光性良好的示踪粒子,由激光光 束首先入射到一组球面透镜上,经聚焦后通过全 反射镜至一组可调的柱面透镜形成具有一定厚度 的片光,照亮流场中特定的区域,此时经过此区 域的示踪粒子被照亮,通过CCD(CMOS)成 像设备进行成像。对这个特定的区域在一定时间 间隔内利用激光脉冲连续照亮两次,就能得到粒 子在第一次照亮时间t 和第二次照亮时间t’的两 个图像,对这两幅图像进行互相关分析,就能得 到流场内部的二维速度矢量分布。
粒子成像测速
粒子成像测速(ParticleImageVelocimetry,PIV) 作为一种新的流场测试技术,不同于传统的热线、 探针、雷达等测速方法,是能够在不扰乱流场的 情况下(非介入),迅速地捕捉到整个流场速度 信息的测量技术。它的出现为复杂流场的研究提 供了更直接有效的方法。本PPT主要介绍了粒子 成像测速方法的工作原理,核心技术,讨论了 PIV 技术的发展趋势。
示踪粒子投入到流场中后,必须被照亮后 才能被相机记录下来,因此对流场的照明也是 PIV 核心技术之一。而激光作为一种高能量密 度的单色光源,能够轻松地汇集成质量较好的 薄光片照明流场而不产生色差,是适用于PIV 优质光源。根据不同的应用场合,可以选取不 同的激光来更好的实现,一些经常被选用的激 光如下:氦-氖激光(λ=633nm)、铜蒸汽激 光(λ=510nm,578nm)、氩离子激光 (λ=514nm,488nm)、红宝石激光 (λ=694nm)以及半导体激光。
PIV是一种基于光学的速度测量技术, 主要是通过在流体中加入跟随流体运 动的示踪粒子,这些粒子在流经一个 特定平面时被连续照亮两次,利用照 相技术将被照亮的粒子记录起来,通 过图像的后处理,就能够得到粒子在 两次照亮的时间间隔中的位移,从而 得出流体的速度场。
粒子图像测速
粒子图像测速(PIV)技术摘要:在流场显示测量技术中,粒子图像测速(PIV)技术占有相当重要的地位。
本文重点介绍了PIV的测试原理及应用要求。
关键词:流场显示测量;粒子图像测速(PIV);DPIV系统0.前言人类至今对流体力学中仍有许多疑难问题(如湍流、非定常流动等)了解其少,而在许多工程应用(如毪行器外形设计、内燃机燃烧室中的多相流动等)中又迫切需要解决这些问题,固而使流场测量涮题变得极为重要。
早期的热线热膜流速计(HWFA)在流动测量特别是湍流研究中占有相当重要的地位,但由于属于接触式测量,对流场干扰甚大,影响了测量的准确度。
随着激光,微电子及计算机技术的飞速旋展和光泛应用,以激光为光源,利用激光散射和干涉原理,人们开发了许多新的测试技术.如激光多谱勒技术、激光散射技术、激光全息技术、激光诱发荧光技术和PIV 技术等。
在所有这些流场显示与测量技术中,PIV.数字PIV(DPIV)技术及其演化发展而来的HPIV技术,因为可以实现埘二维和三维流场的全场非接触测_量并且具有精度高、对流体特性的适应性宽、实现成本不高等特点而广受关注,发展很快。
PIV即粒子图像速度场仪,是流场显示技术的新发展。
它是在传统流动显示技术基础上,利用图形图像处理技术发展起来的一种新的流动测量技术。
综台了单点测量技术和显示测量技术的优点,克服了两种测量技术的弱点而成的,既具各单点测量技术的精度和分辨率,又能获得平面流场显示的整体结构和瞬态图像。
PIV技术从原理发展到成为一种实用的技术.首先要归功于Adrian和Mcrzkirch所做的贡献。
迄今为止,在j维全场测速技术Ip,PIV是最成熟的一种新技术,已迅速变为测速的标准方法,其产品也已走向市场(美国的TSI公司和Aerometrics公司,德围的Lavision 公司以及丹麦的Dantec公司等均有成套产品推出)。
PIV技术的基本原理是:在流场中布撒示踪粒子,并将脉冲激光片光源入射到所测流场区域中,通过连续两谈或多次曝光,粒子的图像被记录在底片上或CCD相机上。
粒子探测技术教学设计 (2)

粒子探测技术教学设计在物理学和工程学领域中,粒子探测技术是研究和诊断各种材料和粒子的重要手段。
在现代物理学和天体物理学中,粒子探测器是探测宇宙射线,探索微观粒子,甚至检测质子和中子加以控制的关键实验设备。
在这种情况下,粒子探测技术的教学设计非常重要,学生需要了解该技术的基本原理、工作原理和应用场景。
本文将介绍关于粒子探测技术教学设计的内容。
教学目标1.了解粒子探测技术的基本原理2.理解探测器的基本构造和工作原理3.掌握常用的粒子探测器及其特点4.了解粒子探测技术在不同领域中的实际应用教学内容粒子探测技术基本原理粒子探测技术是利用物质与粒子相互作用的过程,将粒子的信息转换成测量信号。
在引入这个内容时,需要解释物质和粒子互相作用的原理。
粒子与物质之间的相互作用包括离子化,电离,电子激发,光电效应,康普顿效应,和导致沉积能量的能量损失等。
在教学过程中,应当包括粒子与物质之间交互作用的细节,以及不同类型粒子的相互作用方式有何不同。
探测器的基本构造和工作原理教学应涵盖单一粒子探测器的构造原理和特点,包括可见光和电离辐射探测器和计数器。
原理中应包括能寻址计数器,多条膜气室,荧光计,掺铕荧光体和各种闪烁体和半导体器件。
每种类型探测器应包括其优点和缺点。
常用的粒子探测器及其特点在教学过程中,需要介绍几种不同类型的粒子探测器,并讲述其优势、适用范围和特点。
包括计数器和室,荧光体和闪烁器,以及比较早期的光电计。
此外,还应包括能产生记录和解释输出信号的电路、电路元件和放大器,以及由粒子探测器辐射控制和测试组成的监控系统。
粒子探测技术在不同领域中的实际应用粒子探测技术主要应用于天体物理、物理学、生物学和医学科学。
在教学中,需要讲解粒子探测技术在这些领域中的应用,包括寻找中微子和粒子加速器在粒子物理学中的功能,以及粒子探测器在污染监测中的应用。
在生物学和医学科学中,探测器主要用于心电图和放射性同位素扫描等。
教学方法教学应该包括理论和实际应用,将学习和实践能力结合起来。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
粒子图像测速仪
PIV 1
TSI Incorporated
PIV - 原理
激光片光源
... .
.. ... .
..... . . ......
...... .... ..............................
.
.
.. .
.............
.... ....
TSI Incorporated
TSI POWERVIEW Plus 系列相机的独特功能
❖ 标准相机
– 基于普通光照下的图像拍摄设计 (无激光)
❖ POWERVIEW Plus 系列相机
– 基于激光照明下图像拍摄设计 – 独特的保护罩设计 ❖ POWERVIEW Plus 系列相机的保护罩
– 并不是对CCD阵列的遮挡 – 是对相机电子线路的保护
TSI Incorporated
CCD相机
❖ CCD相机是一个高敏感的元件 ❖ 工作温度-5度-40度,10%-80%湿度要求 ❖ 防止强光对于CCD的损坏 在实验中,避免出现大面积的过曝光 拆卸相机截圈时,注意防止光线直接进入CCD
PIV 1
Copyright© 2006 TSI Incorporated
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
系统连接原理图
外部触发
触发颗粒发生装置
相机 图像卡
激光控制
计算机
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
激光器
❖ (Nd:YAG)双脉冲激光器 ❖ 工作温度5-40度,10%-90%湿度 ❖ 内循环冷却水-采用去离子水作为冷却水,3个月
PIV 1
相机触发
Copyright© 2006 TSI Incorporated
TSI Incorporated
外触发锁相功能
❖ 同步器610036具备外触发锁相以及外部门控信号控制功能,例如: 测试搅拌槽流场,这个功能对于研究搅拌槽内流场非常重要,可有效 的避免拟湍流现象。在搅拌槽内,特别是桨叶排出流区附近,旋转 的桨叶会引起较强的周期性运动,采用外触发锁相功能得到的湍流 数据中将包含桨叶的周期性运动分量,即拟湍流成份。
....... ... ... ............
A
y
流动平面
x
t - 两个脉冲激光的时间间隔 x – X方向颗粒位移 y – Y方向颗粒位移
A点颗粒速度
ux = x/t 当 t 0 uy = y/t 当 t 0
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
– 使用环境
• 水下测量, 大型风洞 • 需要远距离控制CCD拍摄的场合
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
光臂
❖ 高能激光束全封闭传递
❖ YAG激光器最高能量输出可 达500mJ/脉冲
❖ 标准长度 - 1.8 米
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
PIV 系统连接
❖ 成像子系统
– 脉冲激光器 – 光臂 – 片光源
❖ 图像拍摄子系统
– CCD相机 – 图像采集板 – 同步器
❖ 实验辅助系统
-示踪粒子添加系统 -远程遥控系统 -立体标定系统及其底座 ❖ 处理软件 -提供采集、分析、处理和显示PIV结果 -Tecplot流场显示软件
外部触发
❖ 使得PIV测量可以在特定 的时刻进行
– 基于同步器接收到的外 部触发信号
❖ 实验触发同步器 (注时序 控制)
– 同步器触发激光器和 CCD并开始图像拍摄的 工作
❖ 需要一个可以被精确触发 的CCD相机
❖ 同步器可以在一个指定的 时间延迟后触发激光器
轴编码信号 时间延迟
阀门打开 延迟时间
震荡或周期流动 相机触发
TSI Incorporated
激光片光源
• 紧凑透镜组合设计 • 采用柱透镜和球透镜的组合
– 提供片光源厚度和扩展角度的控制
球透镜
光腰
柱透镜
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
同步器
❖ 610036型号:同步精度0.25ns ❖ 控制激光器、CCD相机的工作时序 ❖ 适合PIV,PLIF实验 ❖ 外触发功能:可用于条件采样、周期性流场、锁相
诊断区域 第一帧
第二帧
相关运算
互相关
诊断区域 颗粒位移
互相关运算结果
PIV 1
速度场
Copyright© 2006 TSI Incorporated
TSI Incorporated
POWERVIEWTM PIV 系统
二维系统
三维系统
PIV 1
Copyright© 2006 TSI Incorporated
• 防止强光照射下对CCD中电子线路的损坏
保护罩
CCD 阵列
Camera Circuitry
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
PIV系统中的相机远程控制系统
❖ 远程 Scheimpflug调节控制 ❖ 远程调焦 ❖ 远程光圈调节
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
脉冲能量 – 最大能量的百分数
脉冲激光能量 和 Q开关 延时之间的关系
100%
80%
60%
40%
20%
0%
50
100
150
200
250
300
Q开关延时 (微秒)
PIV 1
Copyright© 2006 TSI Incorporated
测量
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
工作时序
延迟时间
最短跨帧时间
帧1
帧2
相机曝光
t
脉冲间隔时间
脉冲 1
脉冲 2
激光脉冲
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
更换 ❖ 长途搬运前,先排干冷却水
PIV 1
Copyright© 2006 TSI Incorporated
TSI Incorporated
脉冲激光器安全
❖ 200mJ/pulse, 3-5ns脉宽 对应于瞬时功率最高: 200mJ/5ns=4*107W
禁止在激光光路上观察激光 实验时,戴激光保护眼镜 实验人员运行激光器时,注意提醒其他人员 防止激光穿过门、窗