fx-5800P_单一闭附合图根导线近似平差程序
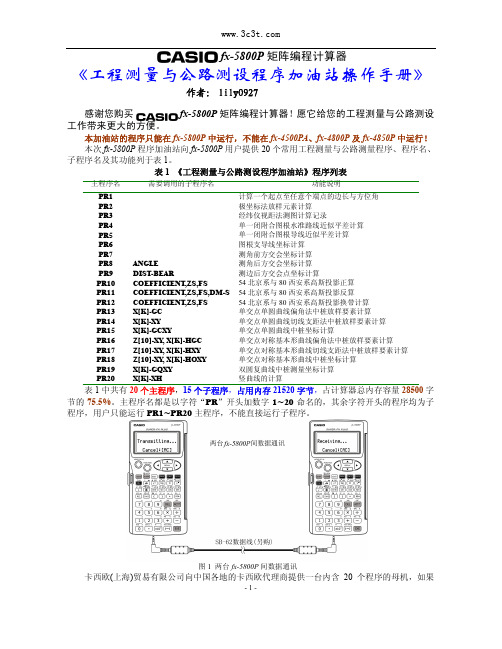
CASIO-fx-5800P实用工程测量程序

CASIO-fx-5800P实用工程测量程序今天,我想向大家介绍一款非常实用的工程测量程序:CASIO-fx-5800P。
CASIO-fx-5800P是一款非常实用的计算器,可以用于各种工程测量和计算。
在这篇文章中,我将详细介绍该计算器的功能和使用方法。
什么是CASIO-fx-5800P?CASIO-fx-5800P是CASIO公司的一款高级科学计算器,该计算器集成了丰富的计算功能和工程测量功能,可以帮助用户准确地进行各种计算和测量。
该计算器适用于各种工程测量、科学计算、数据分析等工作。
CASIO-fx-5800P的功能下面是CASIO-fx-5800P常用的功能:1. 基本运算功能CASIO-fx-5800P可以进行各种基本运算,如加减乘除、开方、开方根、倒数等等。
2. 三角函数和反三角函数CASIO-fx-5800P 提供了三角函数和反三角函数的计算功能,如正弦函数、余弦函数、正切函数、反正弦函数、反余弦函数、反正切函数等。
3. 统计学计算CASIO-fx-5800P 提供了各种统计学计算功能,如数据输入、平均数、方差、标准差、偏差等。
4. 矩阵功能CASIO-fx-5800P 可以完成任何矩阵的基本计算,如矩阵乘法、矩阵求逆、矩阵行列式、矩阵分解、矩阵特征向量和特征值等。
5. 工程测量CASIO-fx-5800P 可以进行各种工程测量计算,如距离计算、面积计算、容积计算、温度计算、时间计算等。
6. 复数运算CASIO-fx-5800P 可以进行各种复数运算,如加减乘除、转换成极坐标形式等。
7. 方程求解CASIO-fx-5800P 可以解各种方程,如一次方程、二次方程、三次方程、四次方程、多项式方程、微积分方程等。
CASIO-fx-5800P在工程测量中的应用下面,我将介绍CASIO-fx-5800P 在工程测量中的应用。
CASIO-fx-5800P 是一种非常实用的计算器,在工程测量中有着广泛的应用。
卡西欧fx-5800P计算器参考线程序(第三版)
卡西欧fx-5800P计算器参考线程序傻瓜教程文/白云面,按2:RUN//运行,选择相应程序名即可。
)命名一个叫CKX的名字,然后按EXE键,选1:COMP。
如下图:然后输入以下代码:Lb1 0:C1s:“K”?K:“A”?A:“B”?B:“C”?C:“D”? D(回车)Po1(C-A,D-B)⊿IfJ≥0:ThenJ→T:E1seJ+360→T:IfEnd(回车)Lb1 1:Fix4:“X”?X(回车)X=0⇒Goto0:“Y”?Y:Po1(X-A,Y-B)→S:IfJ≥0:ThenJ→Q:E1seJ+360→Q:IfEnd:“L=”:K+cos(Q-T)×S⊿“O=”:sin(Q-T)×S⊿Goto1(回车)解释: K为起点桩号(A,B)(C,D)分别为直线L上的两个点,(X,Y)为P点坐再如,要输入Lb1。
先按FUNCTION键(函数),再按3:PROG键。
在弹出来的菜单中选择7:Lb1。
估计最易输错的,莫过于倒数第四排的“⇒”,这里重点介绍一下:按FUNCTION键(函数),再按3:PROG键。
按上下键,翻页至第3页,选3: ⇒。
在了点里程,可以输入0。
2第二步输入点A的X坐标,此时的X坐标用,用字母A代替,即A→X1计算机会默认给用户显示一个,如果按回车EXE,就代表使用默认值。
)这里要特别注意,当弹出默认值时,没有任何提示(或者,机算机是这样提示的:如上图左上角所示的“K?”。
它代表计算机问用户:K是不是等于0?若不是,请输入新值吧!)让用户输入数值。
这时候不用管,直接输入数值即可。
输入数值的具体操作,请按上图红色字体提示操作。
同理,第二步输入B→Y的坐标(同样会默认显示一个),回车1的坐标,回车第三步输入C→X2的坐标,回车第四步输入D→Y2如下图所示:显示AB两个点之间的距离r,AB直线的方位角θ。
【注意这个θ,一定要让它显示为角度,不能是弧度!否则在对中杆立在直线的第三、四象限(假设以A点为坐标原点)就会出现问题!】第五步输入全站仪现场测的点P的X坐标,回车。
工程测量中fx5800P计算器基本程序
工程测量中fx-5800P计算器基本程序的编写及实际放线的应用刘兵策刘杰摘要在日常工程测量工作中,计算器是必不可少的工具。
目前行业内用fx-5800P。
本文介绍测量工作中坐标正反算、大地转施工、施工转大地等常用程序的原理及编写,并对其比较复杂的实际放线的灵活应用进行解析,为类似的测量工作提供借鉴。
关键词工程测量fx-5800P程序应用1 引言控制测量是施工的基础,为了便于施工,放线一般使用施工坐标系,坐标轴平行于建筑物主轴线。
对于建筑物主轴线与坐标轴不平行的,为了方便放线,一般不再改变坐标系,用计算器程序进行计算,迅速判断需要定位的点。
利用fx-5800P计算器根据测出的坐标数据计算出与设计图纸上的差值,指挥棱镜进行移动,找到准确的设计位置。
测量工作中主要用到坐标正反算,大地转施工,施工转大地等常用程序,下面介绍这几个程序的原理和编写,总结一些在实际工作中的应用。
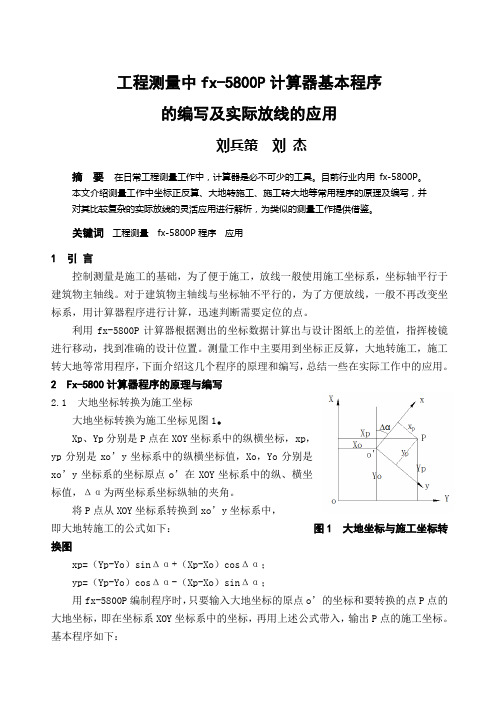
2 Fx-5800计算器程序的原理与编写2.1 大地坐标转换为施工坐标大地坐标转换为施工坐标见图1。
Xp、Yp分别是P点在XOY坐标系中的纵横坐标,xp,yp分别是xo’y坐标系中的纵横坐标值,Xo,Yo分别是xo’y坐标系的坐标原点o’在XOY坐标系中的纵、横坐标值,Δα为两坐标系坐标纵轴的夹角。
将P点从XOY坐标系转换到xo’y坐标系中,即大地转施工的公式如下:图1 大地坐标与施工坐标转换图xp=(Yp-Yo)sinΔα+(Xp-Xo)cosΔα;yp=(Yp-Yo)cosΔα-(Xp-Xo)sinΔα;用fx-5800P编制程序时,只要输入大地坐标的原点o’的坐标和要转换的点P点的大地坐标,即在坐标系XOY坐标系中的坐标,再用上述公式带入,输出P点的施工坐标。
基本程序如下:“X1=”?A:”Y1=”?B: (输入xoy的原点的大地坐标)“X2=”?U:”Y2=”?V: (输入要转换的P点的大地坐标)“F=”:F (输入方位角)“X=”:(V-B)sinF+(U-A)cosF->X (输出P点的施工坐标X值)“Y=”:(V-B)cosF-(U-A)sinF->Y (输出P点的施工坐标Y值)输出坐标时,可以用计算器中的一个极坐标的逆运算代替,即去掉最后两行,换成Pol(U-A,V-B):J<0=>J+360->J“W=”:J-F->WRec(I,W)这种方法计算器的运算效率比较高,编程也比较简便。
CASIO fx-5800p测量程序

CASIO fx-4800P、fx-5800P型计算器用于线路施工曲线中线点坐标的计算程序中铁十局三建公司工程技术部摘要:本文介绍了CASIO fx-4800P 、fx-5800P型计算器程序编制用于铁路、公路曲线线路内任意中线点的坐标计算程序及使用方法。
本计算程序具有操作简便、计算快捷、应用广泛等特点、极大地减轻了测量工作者的内业工作量,对于测量工作者有较大的参考和指导作用。
关键词:曲线线路施工测量计算程序1.概述过去,线路中线施工放样基本依靠经纬仪和钢尺了来进行角度及距离测量。
对于曲线线路一般的测量方法是:经纬仪置于某一中线点上,采用偏角法拨角再用钢尺量距来定出中线点。
随着电子技术进步和经济发展,测量仪器和测量方法的不断改进,目前,全站仪已广泛地应用于工程施工测量中,极大的提高了测量工作效率。
但是,在进行铁路、公路工程的曲线线路施工测设时,需要在线路所在区域建立统一坐标系或独立坐标系,利用坐标变换的方法,将整个曲线的三个部分(第一缓和曲线、中间圆曲线、第二缓和曲线)统一到同一坐标系中。
根据坐标系的建立,计算出整个曲线内任意点的坐标,再采用全站仪利用极坐标方法进行施工放样。
前提是首先利用计算器计算出各中线点坐标,然后才能进行放样。
而普通型计算器不仅计算速度慢,且要求计算者必须正确地记忆很多计算公式,计算繁琐而且容易出错,满足不了现场测设工作的要求。
为了能够快速准确地为全站仪提供测设数据,发挥全站仪快速测设的特点,提高测量工作效率,应采用可编程的计算器,编制计算程序。
本文主要介绍应用CASIO fx-4800P型计算器的计算程序,供公司测量同行们参照使用。
2.计算程序QXZBJS(文件名:曲线坐标计算fx-4800P)Defm2:R:L:A:N“ZH:X=”:E“ZH:Y=”:F:“FWJ=”:K“ZH:LC=”: P=L2/(24R)-L4/(2688R3):M=L/2-L3/(240R2):T“T”=(R+P)tng(A/2)+M ◢G=RAπ/180:“S”S=G+L◢LbiA:{C,V}:C“CSDLC=”:V“HXPJ=”:D=C-K:D≤L=>I=D-D5/(40R2L2):U=D3/(6RL)-D7/(336R3L3):J=√(I2+U2):Goto1:≠>D≤G=>O=90(2D-L)/( Rπ):I=RsinO+M:U=R(1-cosO)+P:J=√(I2+U2):Goto2:≠>D=S-(C-K): = D-D5/(40R2L2):Z[2]=D3/6RL-D7/(336R3L3):I=T+(T-Z[1])cosA-Z[2]sinA:U=(T-Z[1])sinA+Z[2]cosA:J=√(I2+U2):Goto3:Lbi1:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-30D2/ (RLπ):H=F-90D2/ (RLπ):≠>Q=F+30D2/ (RLπ):H=F+90D2/( RLπ)⊿ Goto4:Lbi2:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-O:≠>Q= F+tng-1(U/I):H=F+O⊿Goto4:Lbi3:{Q}:Q“Z=1;Y=2”:Q=1=>Q=F-tng-1(U/I):H=F-(A-90(S-(C-K))2/ (RLπ)): ≠>Q= F+tng-1(U/I):H=F+(A-90(S-(C-K))2/ (RLπ)):⊿ Goto4:Lbi4:B=90+H:H<0=>H“QXFWJ”=B+360◢≠>H≥360=>H“QXFWJ”=H-360 ◢≠>H“QXFWJ”=H◢⊿Goto5:Lbi5: X“CSD:X”=JcosQ+N+VcosB◢ Y“CSD:Y”=JsinQ+E+VsinB◢GotoA3.程序说明3.1 输入已知变量R—圆曲线半径,显示R?L—缓和曲线长,显示L?A—曲线转向角,显示A?E—直缓点纵坐标,显示ZH:X=?N—直缓点横坐标,显示ZH:Y=?F—第一切线方位角,即ZH至JD的方位角,显示FWJ=?K—直缓点里程,显示ZH:LC=?3.2 计算待求量T—切线长度,显示T= …S—曲线全长,显示S= …Z[3]—外矢距,即JD到QZ的距离,显示E0= …3.3 输入待求变量K—输入待求(测设)点的里程,显示LC=?V—横向偏距,即测设点左、右侧外移距的偏移量,若为中线点输入0;右侧输入“+”值,左侧输入“-”值。
fx-5800P程序QH1-8操作说明

目录前言第1章复数及基于统计串列存储数据的编程方法与程序1.1 复数的几何表示方法1.2 复数显示格式的应用1.3 共轭复数1.4 复数形式坐标反算程序(QH1-4)1.5 基于统计串列输入数据的极坐标法放样程序(QH1-5)1.6 复数形式高斯平面坐标线性变换参数计算及批量坐标变换程序(QH1-6)1.7 复数形式建筑坐标与测量坐标的相互变换程序(QH1-7)1.8 复数形式单一闭、附合与无定向导线近似平差原理与程序(QH1-8)1.9 复数形式支导线坐标计算程序(QH1-9)第2章公路与铁路路线平纵曲线正、反算原理与程序2.1 单交点基本型路线曲线坐标正算原理2.2 缓和曲线线元坐标正算原理2.3 缓和曲线线元坐标反算原理2.4 圆曲线与直线线元坐标正、反算原理2.5直线与缓和曲线线元斜交的交点坐标计算原理2.6直线与圆曲线及直线线元斜交的交点坐标计算原理2.7 单交点基本型曲线坐标正、反算程序(QH2-7)2.8 线元法任意路线与匝道曲线坐标正、反算程序(QH2-8)2.9 线元法任意路线与匝道曲线直线斜交程序(QH2-9)2.10 任意个变坡点的连续竖曲线高程计算程序(QH2-10)第3章公路与铁路路线施工测量综合程序3.1 圆曲线加宽值计算程序(QH3-1)3.2 缓和曲线加宽值计算程序(QH3-2)3.3 路线纵断面中平测量记录计算程序(QH3-3)3.4 路线填、挖方工程量计算程序(QH3-4)3.5 方格网法土方量计算程序(QH3-5)3.6 解析法带弓形多边形周长与面积计算程序(QH3-6)第4章公路与铁路路线施工控制测量程序4.1 1954北京坐标系与1980西安坐标系高斯投影正算、反算及换带程序(QH4-1)4.2 测角前方交会坐标计算程序(QH4-2)4.3 测角后方交会坐标计算程序(QH4-3)4.4 测边后方交会点坐标计算程序(QH4-4)4.5 施工水准测量记录计算程序(QH4-5)4.6 四等水准测量计算程序(QH4-6)4.7 单一闭附合图根水准路线近似平差程序(QH4-7)4.8 高斯平面坐标系正形变换程序(QH4-8)复数形式单一闭、附合与无定向导线近似平差程序(QH1-8)计算案例QH1-8程序位于图书第21~24页,单一闭合导线案例数据见第18页图1-13,单一附合导线案例数据见第18页图1-14,单一无定向导线案例数据见第19页图1-15。
fx-5800P_单一闭附合图根导线近似平差程序PM3-1N
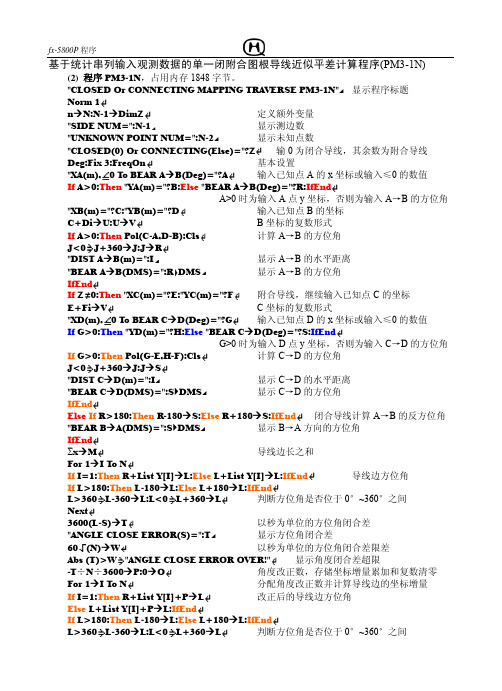
基于统计串列输入观测数据的单一闭附合图根导线近似平差计算程序(PM3-1N)(2) 程序PM3-1N,占用内存1848字节。
"CLOSED Or CONNECTING MAPPING TRAVERSE PM3-1N"\显示程序标题Norm 1n¼N:N-1¼DimZ定义额外变量"SIDE NUM=":N-1显示测边数"UNKNOWN POINT NUM=":N-2\显示未知点数"CLOSED(0) Or CONNECTING(Else)="?Z输0为闭合导线,其余数为附合导线Deg:Fix 3:FreqOn基本设置"XA(m),0 To BEAR A¼B(Deg)="?A输入已知点A的x坐标或输入≤0的数值If A>0:Then "YA(m)="?B:Else "BEAR A¼B(Deg)="?R:IfEndA>0时为输入A点y坐标,否则为输入A→B的方位角"XB(m)="?C:"YB(m)="?D输入已知点B的坐标C+Di¼U:U¼V B坐标的复数形式If A>0:Then Pol(C-A,D-B):Cls计算A→B的方位角J<0J+360¼J:J¼R"DIST A¼B(m)=":I显示A→B的水平距离"BEAR A¼B(DMS)=":R DMS显示A→B的方位角IfEndIf Z0:Then "XC(m)="?E:"YC(m)="?F附合导线,继续输入已知点C的坐标E+Fi¼V C坐标的复数形式"XD(m),0 To BEAR C¼D(Deg)="?G输入已知点D的x坐标或输入≤0的数值If G>0:Then "YD(m)="?H:Else "BEAR C¼D(Deg)="?S:IfEndG>0时为输入D点y坐标,否则为输入C→D的方位角If G>0:Then Pol(G-E,H-F):Cls计算C→D的方位角J<0J+360¼J:J¼S"DIST C¼D(m)=":I\显示C→D的水平距离"BEAR C¼D(DMS)=":S`DMS\显示C→D的方位角IfEndElse If R>180:Then R-180¼S:Else R+180¼S:IfEnd闭合导线计算A→B的反方位角"BEAR B¼A(DMS)=":S`DMS\显示B→A方向的方位角IfEndΣx¼M导线边长之和For 1¼I To NIf I=1:Then R+List Y[I]¼L:Else L+List Y[I]¼L:IfEnd导线边方位角If L>180:Then L-180¼L:Else L+180¼L:IfEndL>360L-360¼L:L<0L+360¼L判断方位角是否位于0°~360°之间Next3600(L-S)¼T以秒为单位的方位角闭合差"ANGLE CLOSE ERROR(S)=":T\显示方位角闭合差60(N)¼W以秒为单位的方位角闭合差限差Abs (T)>W"ANGLE CLOSE ERROR OVER!"显示角度闭合差超限-T÷N÷3600¼P:0¼O角度改正数,存储坐标增量累加和复数清零For 1¼I To N分配角度改正数并计算导线边的坐标增量If I=1:Then R+List Y[I]+P¼L改正后的导线边方位角Else L+List Y[I]+P¼L:IfEndIf L>180:Then L-180¼L:Else L+180¼L:IfEndL>360L-360¼L:L<0L+360¼L判断方位角是否位于0°~360°之间If I N:Then List X[I]∠L¼Z[I]:Z[I]+O¼O:IfEnd累加复数形式坐标增量Next3600(L-S)¼T以秒为单位的方位角闭合差检核计算"CHECK ANGLE CLOSE ERROR(S)=":T\显示方位角闭合差检核结果O-(V-U)¼O计算附合导线的坐标增量闭合差复数形式Int(M÷Abs(O))¼K计算导线全长相对闭合差"DELTA X(m)=":ReP(O)\显示导线X坐标增量闭合差"DELTA Y(m)=":ImP(O)\显示导线Y坐标增量闭合差"RELAT CLOSE ERROR=1÷":K\显示导线全长相对闭合差K<2000"RELAT CLOSE ERROR OVER!"显示全长相对闭合差超限For 1¼I To N-1分配坐标闭合差并计算未知点的坐标Z[I]-OList X[I]÷M¼X改正后的导线边坐标增量复数If I=1:Then U+X¼Y:Else Y+X¼Y:IfEnd未知点坐标复数形式Norm 1:"POINT n=":I\显示未知点号Fix 3:"Xp(m)=":Rep(Y)\显示未知点的X坐标"YP(m)=":ImP(Y)\显示未知点的Y坐标NextY-V¼Q计算导线的坐标检核结果"CHECK X(m)=":ReP(Q)\显示X坐标检核计算结果"CHECK Y(m)=":ImP(Q)\显示Y坐标检核计算结果"PM3-1N END"(3) 程序说明运行程序前,先按键进入REG模式,按键多次删除统计串列的数据,按坐标推算路线、从起点向终点方向将水平距离观测值顺序输入统计串列List X,将水平夹角观测值顺序输入统计串列List Y,当观测的水平夹角位于坐标推算路线左边时,输入正角度;当观测的水平夹角位于坐标推算路线右边时,输入负角度。
《2013卡西欧CASIO fx-5800P坐标计算程序》班刚立:整理

算程序》班刚立:整理2013.03.16《2013卡西欧CASIO fx-5800P坐标计算程序》班刚立:整理2013.03.16《2013卡西欧CASIO fx-5800P坐标计算程序》班刚立:整理2013.03.16算程序》班刚立:整理2013.03.16简介:卡西欧CASIO fx-5800P编程计算器,语言简单易懂,使用范围广泛,是工程测量技术人员的一项重要指标。
适用:卡西欧CASIO fx-5800P计算器使用。
《2013卡西欧CASIO fx-5800P坐标计算程序》班刚立:整理2013.03.16算程序》班刚立:整理2013.03.16NO.1:CASIO fx-5800P CYT 综合曲线坐标正反算程序V3.0说明:本程序适用于计算器 CASIO fx-5800P,可计算:第一夹直线段、第一缓和曲线段、圆曲线段、第二缓和曲线段、第二夹直线段的线路中、边桩坐标及切线方位角和坐标正反算、竖曲线高程。
下载:点击下载NO.2:CASIO fx-5800P ZXZFS 直线正反算坐标计算程序说明:该程序适用于计算器 CASIO fx-5800P,针对直线正反算设计,正算可算直线中边桩坐标及其斜交、反算可推算直线距线路中心的里程偏距。
下载:点击下载NO.3:CASIO fx-5800P QXZF隧道超欠挖坐标计算程序Beta1.21说明:适用于铁路隧道三圆心,超欠挖检测和轮廓线放样。
下载:点击下载NO.4:CASIO fx-5800P线元法坐标计算程序说明:该程序适用于CASIO fx5800P计算器,坐标正算、反算一体程序,适用性广(包括:复曲线、S型曲线、匝道)等。
下载:点击下载NO.5:CASIO fx-5800P FWJ方位角和距离计算程序说明:本程序可计算两坐标点之间距离和方位角。
下载:点击下载NO.6:CASIO fx-5800P多边形面积计算程序说明:适用于地形测量计算特征点多边形面积。
fx-5800p坐标正、反算;面积;土方量;单一水准路线平差;复数形式单一闭、附合与无定向导线近似平差程序。
fx-5800p坐标正、反算;面积计算;土方量计算;单一水准路线近似平差计算;复数形式单一闭、附合与无定向导线近似平差计算程序。
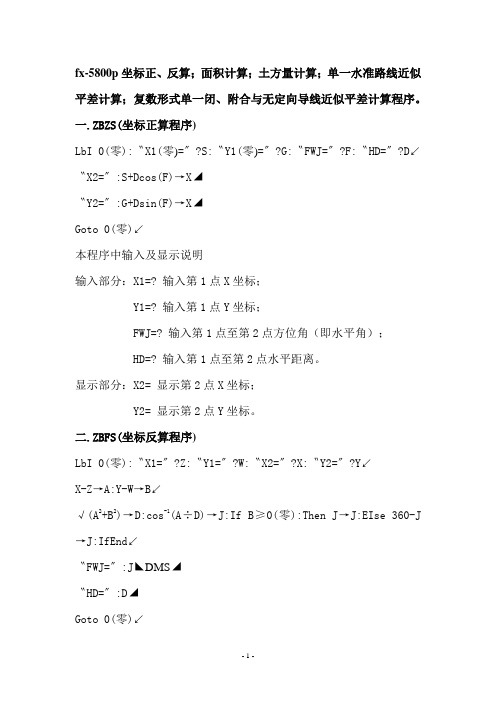
一.ZBZS(坐标正算程序)LbI 0(零):〝X1(零)=〞?S:〝Y1(零)=〞?G:〝FWJ=〞?F:〝HD=〞?D↙〝X2=〞:S+Dcos(F)→X◢〝Y2=〞:G+Dsin(F)→X◢Goto 0(零)↙本程序中输入及显示说明输入部分:X1=? 输入第1点X坐标;Y1=? 输入第1点Y坐标;FWJ=? 输入第1点至第2点方位角(即水平角);HD=? 输入第1点至第2点水平距离。
显示部分:X2= 显示第2点X坐标;Y2= 显示第2点Y坐标。
二.ZBFS(坐标反算程序)LbI 0(零):〝X1=〞?Z:〝Y1=〞?W:〝X2=〞?X:〝Y2=〞?Y↙X-Z→A:Y-W→B↙√(A2+B2)→D:cos-1(A÷D)→J:If B≥0(零):Then J→J:EIse 360-J →J:IfEnd↙〝FWJ=〞:J◣DMS◢〝HD=〞:D◢Goto 0(零)↙本程序中输入及显示说明输入部分:X1=? 输入第1点的X坐标;Y1=? 输入第1点的Y坐标;X2=? 输入第2点的X坐标;Y2=? 输入第2点的Y坐标;显示部分:FWJ= 显示第1点至第2点的方位角(即水平角); HD= 显示第1点至第2点的水平距离。
三.MIAN JI(面积计算程序)LbI 0(零):〝DIAN SHU=〞?N:〝X=〞?A:〝Y=〞?B↙0(零)→K:N-1→N:A→C:B→D↙LbI 1:〝X=〞?X:〝Y=〞?Y↙(X-C)(Y+D)÷2→Q:K+Q→K:X→C:Y→D↙Dsz N: Goto 1↙〝MIAN JI=〞:Abs(K+(A-C)(B+D)÷2→M◢Goto 0(零) ↙本程序中输入及显示说明输入部分:DIAN SHU=? 输入总点数;X=? 输入第1点的X坐标;Y=? 输入第1点的Y坐标;连续输入第2、3、4、………、各点的X、Y坐标。
卡西欧fx-5800p计算器测量程序
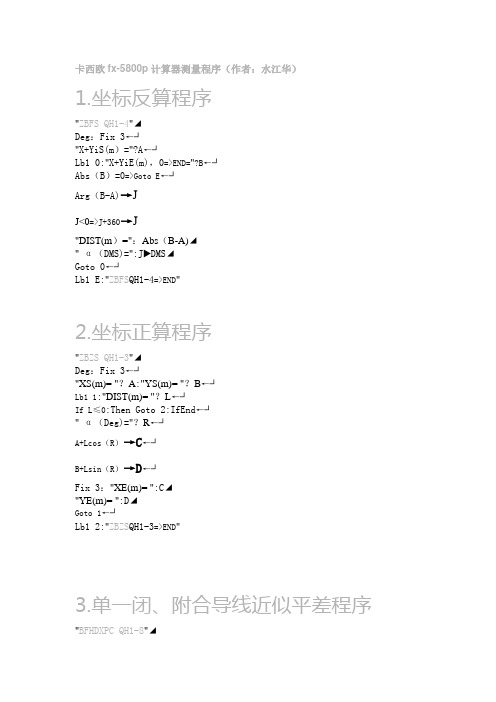
卡西欧fx-5800p计算器测量程序(作者:水江华)1.坐标反算程序"ZBFS QH1-4"◢Deg:Fix 3←┘"X+YiS(m)="?A←┘Lb1 0:"X+YiE(m),0=>END="?B←┘Abs(B)=0=>Goto E←┘Arg(B-A)→JJ<0=>J+360→J"DIST(m)=":Abs(B-A)◢"α(DMS)=":J▶DMS◢Goto 0←┘Lb1 E:"ZBFS QH1-4=>END"2.坐标正算程序"ZBZS QH1-3"◢Deg:Fix 3←┘"XS(m)= "?A:"YS(m)= "?B←┘Lb1 1:"DIST(m)= "?L←┘If L≤0:Then Goto 2:IfEnd←┘"α(Deg)="?R←┘A+Lcos(R)→C←┘B+Lsin(R)→D←┘Fix 3:"XE(m)= ":C◢"YE(m)= ":D◢Goto 1←┘Lb1 2:"ZBZS QH1-3=>END"3.单一闭、附合导线近似平差程序"BFHDXPC QH1-8"◢Deg:Norm 1:FreqOn←┘n→N←┘If List Y[N]=0:Then N-1→DimZ:Goto 0←┘Else N→DimZ:Goto 1: IfEnd←┘Lb1 0: "CLOSE Or CONECT TRA VE"◢"ANGLE NUM=":N◢"SIDE NUM=":N-1◢"UNKNOWN P NUM=":N-2◢"CLOSE(0),CONNECT(≠0)="?→Z←┘Fix 3:"XA(m),≤0=>αA→B(Deg)="?A←┘If A>0:Then "YA(m)= "?B:Else "αA→B(Deg)="?R:IfEnd←┘"XB(m)= "?C:"YB(m)= "?D←┘C+Di→U:U→V←┘If A>0:Then Pol(C-A,D-B):Cls←┘J<0=>J+360→J:J→R←┘"DIST A→B(m)=":I◢"αA→B(DMS)=":R▶DMS◢IfEnd←┘If Z≠0:Then "XC(m)= "?E:"YC(m)= "?F←┘E+Fi→V←┘"XD(m),≤0=>αC→D(Deg)="?G←┘If G>0:Then "YD(m)= "?H←┘Pol(G-E,H-F):Cls←┘J<0=>J+360→J:J→S←┘"DIST C→D(m)=":I◢"αC→D(DMS)=":S▶DMS◢Else "αC→D(Deg)="?S:IfEnd←┘Else If R>180:Then R-180→S:Else R+180→S:IfEnd←┘IfEnd←┘∑y→M←┘For 1→I To N←┘If I=1:Then R+List X[I]→L:Else L+List X[I]→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘Nent←┘3600(L-S)→T←┘"α CLOSE ERROR(S)=":T◢40→W←┘Abs(T)>W=>"α CLOSE ERROR OVRE!"←┘-T÷N÷3600→P:0→O←┘For 1→I To N←┘If I=1:Then R+List X[I]+P→L←┘Else L+List X[I] +P→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘If I<N:Then List Y[I]<L→Z[I] :Z[I]+O→O:IfEnd←┘Nent←┘3600(L-S)→T←┘"CHECK α CLOSE ERROR(S)=":T◢U+O-V→O←┘Int(M÷Abs(O))→K←┘"DELTA X(m)= ":ReP(O)◢"DELTA Y(m)= ":ImP(O)◢"RELAT CLOSE ERROR=1÷":K◢K<4000=>"RELAT CLOSE ERROR OVER! "←┘For 1→I To N-1←┘Z[I]-OList Y[I]÷M→X←┘If I=1:Then U+X→Y:Else Y+X→Y:IfEnd←┘Norm 1:"POINT n=":I◢Fix 3:"X(m)= ":ReP(Y)◢"Y(m)= ":ImP(Y)◢Nent←┘Y-V→Q←┘"CHECK X (m)= ":ReP(Q)◢"CHECK Y (m)= ":ImP(Q)◢Goto E←┘Lb1 1:"NO DIRECT TRA VE"◢"ANGLE NUM=":N-1◢"SIDE NUM=":N◢"UNKNOWN P NUM=":N-1◢"XA(m)= "?A:"YA(m)= "?B←┘"XB(m)= "?C:"YB(m)= "?D←┘A+Bi→U:C+Di→V←┘0→H:U+List Y[1]<H→Z[1]←┘For 1→I To N-1←┘H+List X[1]→H←┘If H>180:Then H-180→H:Else H+180→L:IfEnd←┘以下未完程序由读者完成。
卡西欧5800P矩阵编程计算器说明书
1、程序 PR1,计算一个起点至任意个端点的边长与方位角
"X,Y DIST And BEARING PR1" Deg:ClrStat:FreqOff:Fix 3 "X0(m)="?A:"Y0(m)="?B 0K
② 在您购买的 fx-5800P 上按 键打开机器电源,按
(LINK) (Receive)键使您
的机器处于接收数据状态,屏幕显示“Receiving…”,表示机器正等待接收母机发送来的数据;
③ 在代理商的母机上按 键打开机器电源,按
(LINK) (Transmit) (All)
(Yes)键启动代理商的母机发送数据,屏幕显示“Transmitting…”,表示正在发送数据。
六十进制的角度值,应将光标移动到 List Y 的某个单元,按
键。
2、程序 PR2,极坐标法放样元素计算
"POLAR SETTING-OUT PR2" Deg:ClrStat:FreqOff:Fix 3 "XO(m)="?A:"YO(m)="?B "X0(m)="?C:"Y0(m)="?D Pol(C-A,D-B):Cls If J<0:Then J+360 E:Else J E:IfEnd "DIST O 0(m)=":I "BEAR O 0(DMS)=":E DMS 1 K:I List X[K]:E List Y[K]
提示输入 n 点的 y 坐标 调用极坐标函数并清除屏幕显示
CASIOfx-5800p程序编写操作步骤
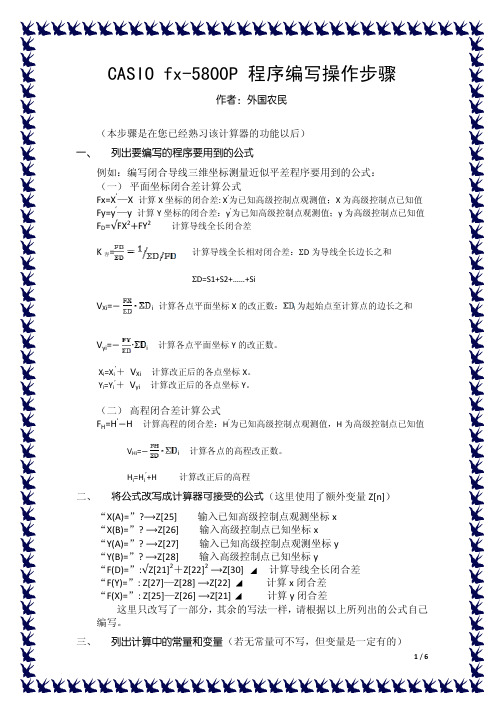
6/5
键 EXE 按 673.133 值程高点知已入输 键 EXE 按 193.133 值测观程高点知已入输 键 EXE 按 568.9347 值标坐 y 点知已入输 键 EXE 按 478.9347 值测观标坐 y 点知已入输 键 EXE 按 135.8493 值标坐 x 点知已入输 键 EXE 按 484.8493 值测观标坐 x 点知已入输 键 EXE 按、2 和之长全线导示显 419.9511 = ) D ( Σ 示显 键 EXE 按 和之长边点#6 至边始起示显 419.9511 =)6−1D(Σ 示显 键 EXE 按 和之长边点#5 至边始起示显 412.178 =)5−1D(Σ 示显 键 EXE 按 和之长边点#4 至边始起示显 295.746 =)4−1D(Σ 示显 键 EXE 按 和之长边点#3 至边始起示显 259.935 =)3−1D(Σ 示显 键 EXE 按 和之长边点#2 至边始起示显 956.663 =)2−1D(Σ 示显 键 EXE 按 „„� �边条 6 有 只线导本为因�0 入输都�8�S 和)7(S�意注�)8(S 到直键 EXE 按)1(S 入输 键 EXE 按”CPXDHB“序程开打、1 �下如作操体具序程的步六第 。序程有所除删为 seli F llA �序程定指除删为 eli F enO �序程除删�键�ETELED� �序程�改修或�辑编�键�TIDE� �序程行�运或�执�键�NUR� �序程建�新或�创�键�WEN� 4 3 2 1
面画程编建新现
出�键
1
5
EDOM
NO/CA
按�能功程编器算计入进、1
和之长边长全线导算计 ]02[Z ⟶N+M+W+G+E+C+B+A:”=)D(Σ“ W+G+E+C+B+A:” �6−1�DΣ“ G+E+C+B+A:” �5−1�DΣ“ E+C+B+A:” �4−1�DΣ“ �推类下以�和之边条三第至边始起算计 C+B+A:” �3−1�DΣ“ 和之边条二第至边始起算计 B+A:” �2−1�DΣ“ 据数长边各边线导入输 ↲N?”=)8(S“:M?”=)7(S“ :W? ”=)6(S“ :G? ”=)5(S“ :E? ”=)4(S“ :C? ”=)3(S“ :B? ”=)2(S“ :A? ”=)1(S“ 序程子和之长边算计 HZCB
fx5800P测量公式及程序汇总
卡西欧5800P 测量程序汇总CASIO fx5800P公路施工放线测量公式及程序一、已知座标,求平距和方位角(座标反算):公式:D=√(Xp-Xo)2+(Yp-Yo)2 α=arctg(Yp-Yo)/(Xp-Xo) 程序:“A”?→A:“B”?→B:Lbl 0:“X”?→X:“Y”?→Y:(X-A)→M:(Y-B)→N:“D=”:√(M2+N2)⊿ tan-1(N/M) →C:If M<0:Then “Q=”:180+C →Q ⊿ Else If N>0: Then “Q=”:C→Q ⊿ Else “Q=”:360+C→Q ⊿ If End : If End : Goto 0 说明:(A,B)为测站点坐标,(X,Y)为所求点坐标。
输出:D为平距,Q为方位角。
二、已知直线的坐标方位角Q和直线起点坐标(Xo,Yo),求直线上任一点的中桩坐标(X, Y),左右边桩坐标(XL,YL)、(XR,YR):公式:X =Xo+LcosQ Y=Yo+LsinQ程序:“A”?→A:“B”?→B:“Q”?→Q:“Z”?→Z:Lbl 1: “P”?→P:“J”?→J:“M”?→M:Abs(M-Z)→W:“X=”:A+W*cos(Q)+P cos(Q+J)→X ⊿“Y=”:B+W*sin(Q)+P sin(Q+J) →Y ⊿Goto 1 说明:(C,D)为直线起点坐标,Q为直线方位角,Z为起点桩号,L为所求坐标点桩号。
“U”为左边距,“T”为右边距,“V”为偏角;U=0时不算边桩坐标。
输出:(X,Y)为中桩坐标,(XL,YL)为左边桩坐标,(XR,YR)为右边桩坐标。
三、已知圆曲线起点坐标(U,V),切线方位角Q,桩号Z和圆半径R,求圆曲线上桩号为 L的点中桩坐标(X,Y),左右边桩坐标(XL,YL)、(XR,YR):公式:ψ=90L/(лR) (偏角公式) C=2Rsin ψ (对应弧的弦长公式)弦的方位角:Q=Qo±ψ(曲线左转时为“-”)程序:“U”?→U:“V”?→V:“Q”?→Q:“R”?→R:“Z”?→Z:“W=-1,1”:?→W:“ZJ=”:?→Z[1]:“YJ=”:?→Z[2]:“PIAN JIAO”:?→T:Lbl 2: “M”?→M:180*(M-Z)/(2π*R)→J:R*2sin(J)→K:If W=-1:Then“X=”:U+K*cos (Q-J)→X⊿ “Y=”:V+K*sin(Q-J)→Y ⊿“Q=”:Q-180*(M-Z)/(πR)→O⊿ Else If W=1:Then“X=”:U+K*cos(Q+J)→X⊿“Y=”:V+K*sin(Q+J)→Y ⊿ “Q=”:Q+180*(M-Z)/(πR)→O⊿ IfEnd:IfEnd:T=0=>Goto 2:“XL=”:X+Z[1]*cos(O-T)→F⊿“YL=”:Y+Z[1]*sin(O-T)→P⊿“XR=”:X+Z[2]*cos(O+T)⊿“YR=”:Y+Z[2]*sin(O+T) ⊿ Goto 2 说明:W=-1时曲线左转, W=1时曲线右转。
卡西欧fx-5800p计算器 公路测量常用程序
FX-5800p计算器公路测量常用程序一、程序功能本程序由6个主程序、5个次子程序及5个参数子程序组成。
主要用于公路测量中坐标正反算,设计任意点高程及横坡计算,桥涵放样,路基开挖口及填方坡脚线放样。
程序坐标计算适应于任何线型.二、源程序1.主程序1:一般放样反算程序(①正算坐标、放样点至置仪点方位角及距离;②反算桩号及距中距离)程序名:1ZD-XYLb1 0:Norm 2F=1:(正反算判别,F=1正算,F=2反算,也可以改F前加?,改F为变量)Z[1]=90(与路线右边夹角)Prog"THB":F=1=>Goto 1:F=2=>Goto 2Lb1 1:Fix 3:"X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:Lb1 2:Fix 3:"KM=":Locate 6,4,Z◢Goto 02.主程序2:高程序横坡程序(设计任意点高程及横坡)程序名:2GCLbI 0:Norm 2“KM”?Z:?D:Prog”H”:Fix3:”H=”:Locate 6,4,H◢“I=”: Locate 6,4,I◢Goto 03.主程序3:极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:3JSX:Y:1268.123→K(置仪点X坐标)2243.545→L(置仪点Y坐标,都是手工输入,也可以建导线点数据库子程序,个人认为太麻烦)Y-L→E:X-K→F:Pol(F,E):IF J<0:ThenJ+360→J:Int(J)+0.01Int(60Frac(J))+0.006Frac(60Frac(J)) →J:(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示) Fix 4:” FWJ=”: Locate 6,4,J◢(不习惯小数点后四位为角度显示的,也可以用命令J◢DMS◢来直接显示)Fix 3:”S=”:Locate 6,4,I◢4.主程序4:涵洞放样程序(由涵中心桩号计算出各涵角坐标、在主程序3中输入置仪点坐标后计算放样点至置仪点方位角及距离)程序名:4JH-XYLbI 0:Norm 290→Z[1](涵洞中心桩与右边夹角,手工输入,也可以修改成前面加?后变为变量)1→F:Prog”THB”:?L:Z[2]-Z[1] →E:X+Lcos(E) →X:Y+Lsin(E) →Y:Fix 3: "X=":Locate 6,4,X◢"Y=":Locate 6,4,Y◢Prog"3JS”:Goto 0:5.主程序5:路基开挖边线及填方坡脚线放样程序(输入大概桩号及测量坐标、地面标高计算出偏移距离、桩号、距中距离、填挖高度)程序名:5FBXLbI 0:Norm 2: 18→DimZ:2→F:90→Z[1]:Prog“THB”:Z:D:”M0”?M:M→Z[4]:D→Z[3]:Prog”6GD”:L→Z[6]:If D<0:Then 0.75-L→D:GotoH:Else L-0.75→D:Goto H:IfEndLbI H:Prog”H”:H-0.03-Z[4] →Z[5]:Z[6] →L:If Z[5]<0:Then –z[5] →G:Goto W:Else Z[5] →G:Goto T:LbI W:Prog “W0”:Z[10]+Z[11] →A: If G>A:Then Goto 1:Else If G>Z[10]:Then Goto 2:Else Goto 3:IfEnd:LbI 1:L+Z[12]+Z[13]+Z[14]+(G-A)×Z[9]+Z[11]×Z[8]+Z[10]×Z[7]:Goto Z:LbI 2:L+Z[12]+Z[13]+(G-Z[10])×Z[8]+Z[10]×Z[7]:Goto Z:LbI 3:L+Z[12]+G×Z[7]:Goto z:LbI T:L+0.5→N:If G>Z[17]:Then (N+Z[18]+(G-Z[17])×Z[16]+Z[17]×Z[15])→S:Goto Z:Else (N+G×Z[15])→S:Goto z:LbI Z:Z[3]→D:Fix 2:Abs(D)-S→T:”L0=”:L Locate 6,4,T◢"D=":Locate 6,4,D◢“TW=”: Locate 6,4,Z[5]◢Goto 06.主程序6:路基标准半幅宽度计算程序(对于设计有加宽渐变的有用,如路基宽度无变化,则把此程序直接输入半幅宽度值至L)程序名:6GDProg “G0”Z-C→E:(B-A)×E/S+A→L:L:7.坐标计算次程序(THB)程序名:THB18→DimZ:"KM"?Z:Prog "X0"1÷P→C: (P-R)÷(2HPR) →S:180÷π→E:F=1=>Goto 1:F=2=>Goto 2←┘Lbl 1:?D: Abs(Z-O) →W:Prog "A":X:Y:Goto 3LbI 2:X:Y:X→I:Y→J:Prog "B":O+W→Z:D→D:Goto 3LbI 3:IF F=1Then X:Y:Else Z:D8. 正算子程序(A)程序名:A0.1184634425→A: 0.2393143352→B:0.2844444444→N 0.046910077→K:0.2307653449→L:0.5→M: U+W(Acos(G+QEKW(C+KWS))+Bcos(G+QELW(C+LWS))+Ncos(G+QEMW(C+MWS))+Bcos(G+QE(1-L)W(C+(1-L)WS))+Acos(G+QE(1-K)W(C+(1-K)WS))) →X:V+W(Asin(G+QEKW(C+KWS))+Bsin(G+QELW(C+LWS))+Nsin(G+QEMW(C+MWS))+Bsin(G+QE(1-L)W(C+(1-L)WS))+Asin(G+QE(1-K)W(C+(1-K)WS))) →Y:G+QEW(C+WS)+Z[1]→Z[2]:X+Dcos(Z[2])→X: Y+Dsin(Z[2])→Y9. 反算子程序(B)程序名:BG-90→T: Abs((Y-V)cos(T)-(X-U)sin(T)) →W:0→D:Lbl 0:Prog "A": T+QEW(C+WS) →L: (J-Y)cos(L)-(I-X)sin(L)→D:IF Abs(D)<0.01:Then Goto1:Else W+D→W:Goto 0←┘Lbl 1:0→D:Prog "A":(J-Y)÷sin(Z[2]) →D:10.高程计算子程序(H)程序名:HProg “S0”:R:T:C:G:I:C-T→F:Z-F→L:C+T→E:G-TI→Q:If T=O:Then Q+LI→H:Goto 0:Else IfZ<F:Then Q+LI→H:Goto 0:Else If Z≤E:Then Q+LI+L2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto I:LbI I:H:I:11.高程超高计算程序(I)程序名:IProg”I0”:W=1=> Goto 0:W=2=>Goto 1:LbI 0:If L=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷L+M)→V:Goto 2:IfEnd: LbI 1:If L=0:Then Abs(D)×M→V:Goto 2:ElseAbs(D)×(((3((Z-C)÷L)2-2((Z-C)÷L)∧(3))×(N-M))+M)→V:Goto 2:IfEnd:LbI 2:Abs(D)→E:V÷E→I:I(E-K)→V:12.数据子程序(附后示例)①程序名:X0(坐标计算要素程序)If Z≥25900 And Z≤26615.555:Then 25900→O:11587.421→U:1847.983→V:101。
FX-5800P线路计算程序

FX-5800P线路计算程序F[NPT](主程序)Lbl Q(选择单点或多点计算模式)4→DimZ“SELECT MODE”“F0:ONE POINT”“F1:N POINT”?→Z[4]If Z[4]=0:Then Goto B: Else If Z[4]=1:Then Goto A: Else Cls :Goto Q:IfEnd: IfEndLbl A(批量计算直角坐标和极坐标元素入口)Norm 1:Deg:FreqON:ClrStat:0→N:ClsProg"STATION":IF Z[3]=-1:Then Cls:Stop:IfEndClsZ[1]→E“[KS]+Ke]i=”?E:E→Z[1]:Cls“STEP=”?→Z[2]:Cls“Zp=”?Z90→C:Cls:”ANG=”?CLbl 1(循环生成桩号序列)ReP(E)→List Freq[1]ReP(E)+(Z[2]-10(Frac(0.1ReP(E)))→List Freq[2]For 3→M To (Int(((ImP(E)-ReP(E))÷Z[2])+2-1)List Freq[M-1]+Z[2]→List Freq[M]NextLbl 2(循环计算坐标)ImP(E)→List Freq[M+1]For 1→M To (Int((ImP(E)- ReP(E))÷Z[2])+2)List Freq[M]→SProg"DATP[MC]"Prog"TURN[YS]"Prog"ZS"Fix3X→ListX[M]Y→ListY[M]Cls:Norm 1Locate 2,2,”COMPUTER…”Locate 13,2, Intg(((ImP(E)- ReP(E))÷Z[2])+2-M)Fix 3NextLbl 3(提取结果并显示)Cls:”PRESS[MODE][4]=>AnsF[XYK]Or[EXE] =>SET OUT”◄For 1→M To Int((ImP(E)- ReP(E))÷Z[2])+2List X[M]→XList Y[M]→YList Freq[M]→SProg"POL"Prog"DISP.KZ"◄Prog"DISP.XY"◄NextGoto ALbl B(单点计算模式入口)Norm 1:Deg:0→N(置零)Prog"STATION"Cls:90→C:”ANG=”?CLbl 4(单点计算模式)Cls:”Kp=”?SIF S=-1:Then Cls:Stop:IfEndCls:”Zp=”?ZProg"DATP[MC]"Prog"TURN[YS]"Prog"ZS"Prog"POL":Prog"DISP.XY"◄Goto 4STATION(测站输入子程序)ClsZ [2N+3]→E"St[X]+St[Y]i"?EE→Z[2N+3]ReturnDATP[MC](平面数据库子程序)If S≤K ei:Then [ [ K si,X Si , Y Si , T Si , R Si ,R ei,K ei,Q i] ]→Mat A :Return:IfEndIf S≤K e i+1:Then [ [ K si+1,X si+1 , Y si+1 , T si+1, R si+1 ,R ei+1,K ei+1,Q i+1] ]→Mat A:Return:IfEnd .............TURN[YS](将存在矩阵中的线元数据赋给正算标准变量)Mat A[1,1]→OMat A[1,2]→UMat A[1,3]→VMat A[1,4]→GMat A[1,5]→PMat A[1,6]→RMat A[1,7]→HMat A[1,8]→QReturnZS(线路正算预备子程序)Abs(S-O)→W(P-R)÷(2PR(H-O))→DProg"G[ZS]"ReturnG[ZS](高斯-勒戎德4节点近似积分计算线元坐标子程序)Lbl 00.1739274226→A: 0.32607257774→B0.0694318442→K: 0.3300094782→LLbl 1U+W(ACos(G+180QKW(1÷P+KWD)÷π)+BCos(G+180QLW(1÷P+LWD)÷π)+BCos(G+180(1-L)QW(1÷P+(1-L)WD)÷ π)+ACos(G+180(1-K)QW(1÷P+(1-K)WD)÷π))→X V+W(ASin(G+180QKW(1÷P+KWD)÷π)+BSin(G+180QLW(1÷P+LWD)÷π)+BSin(G+180(1-L)QW(1÷P+(1-L)WD)÷π)+ASin(G+180(1-K)QW(1÷P+(1-K)WD)÷π))→Y G+180QW(1÷P+WD)÷π+C→FX+Z Cos(F)→XY+Z Sin(F)→Y360Frac((360+F-C)÷360)→TReturnPOL(极坐标计算子程序)Pol(X-ReP( Z [2N+3 ]),Y-ImP(Z [2N+3 ])+10^(-5))J<0=>J+360→JReturnDISP.K Z(桩号及偏距显示子程序)Fix 3:Cls"K p=":Locate 5,2,SLocate 1,3," Z p="Locate 5,4,ZReturnDISP.XY(极坐标要素及直角坐标显示子程序)Fix 3:Cls"HR=":Locate 5,1,J0"HD=":Locate 5,2,I"X p=":Locate 5,3,X"Y p=":Locate 5,4,YReturn关于程序的几点说明1.写此程序的初衷是应网友“K0+000"之邀,提供一份基本程序供初学者参考之用。
CASIO Fx-5800P计算器测量计算程序

CASIO Fx-5800P计算器测量计算程序一、井下斜距改成平距和高差的计算程序“SJ=”?S:“CZJ=”?B:“YQG=”?C:“QSG=”?DS×cos(B)→LS×sin(B)-C+D→V“L=”:L◢“GC=”:V◢CLS说明:SJ→斜距;CZJ→垂直角;YQG→仪器高;QSG→前视高;L→平距;GC→高差。
二、测量基本控制导线坐标计算程序“L=”?L:“GC=”?V:“SBJ=”?AW+A→WIF W<180:Then W+180→W: Else W-180→W: IFEndIF W<360:Then W→W: Else W-360→W: IFEndIF W<360:Then W→W: Else W-360→W: IFEndX+L×cos(W)→X:Y+ L×sin(W)→Y:Z+V→Z“FWJ=”:W DMS◢“X=”:X◢“Y=”:Y◢“Z=”:Z◢CLS说明:(1)、把已知的X坐标先存入X、Y坐标存入Y、高程存入Z、方位角存入W(2)、L→平距;GC→高差;SBJ→水平角;FWJ→方位角;X→X坐标;Y→Y坐标;Z→高程。
三、井下测量导线坐标计算程序“SJ=”?S:“CZJ=”?B:“YQG=”?C:“QSG=”?D :“SBJ=”?A S×cos(B)→LS×sin(B)-C+D→VZ+V→ZW+A→WIF W<180:Then W+180→W:Else W-180→W:IFEndIF W<360:Then W→W:Else W-360→W:IFEndIF W<360:Then W→W:Else W-360→W:IFEndX+L×cos(W)→X:Y+ L×sin(W)→Y:Z+V→Z“L=”:L◢“GC=”:V◢“FWJ=”:W DMS◢“X=”:X◢“Y=”:Y◢“Z=”:Z◢CLS说明:(1)、把已知的X坐标先存入X、Y坐标存入Y、高程存入Z、方位角存入W(2)、SJ→斜距;CZJ→垂直角;YQG→仪器高;QSG→前视高;L →平距;GC→高差;SBJ→水平角;FWJ→方位角;X→X坐标;Y→Y坐标;Z→高程。
Fx-5800计算器程序(含定向及放样方位角、距离计算)

Fx-5800计算器程序一、道路放样(含定向及放样方位角、距离计算)1、主程序:1JDZB(利用第一交点坐标,第二交点坐标,第三交点坐标及里程,偏角,半径,缓和曲线长度计算)20→DimZ“JD1X=”:?X:X→Z[1]:“JD1Y=”:?Y:Y→Z[2]: 输入JD1坐标“JD2X=”:?X:X→U:“JD2Y=”:?Y:Y→V: 输入JD2坐标“JD3X=”:?X:X→Z[3]:“JD3Y=”:?Y:Y→Z[4]: 输入JD3坐标I=PoI(U-Z[1],V-Z[2]):If J<0:Then J+360→J:EIse J→J:IfEnd:J→F:"F12=":F►DMS▲显示起始边方位角I=PoI(Z[3]-U,Z[4]-V):If J<0:Then J+360→J:EIse J→J:IfEnd:J→Z[5]:"F23=":Z[5]►DMS▲显示结束边方位角F-Z[5]→A:If A<-180:Then A+360→A:EIse A→A:If End:"A=":A►DMS▲显示偏角Prog“2FJDA”2、次主程序:2FJDA(利用起始方位角,交点坐标及里程,偏角,半径,缓和曲线长度计算)"HX="?X:"HY="?Y: 输入定向(后视点)坐标"ZX="?H:"ZY="?K: 输入测站点坐标Prog“J”显示定向(后视点)距离和方位角“A=”?A:输入偏角(左“-”右“+”),当利用1JDZB程序时,不用再次输入“R=”?R:输入平曲线半径“LS=”?L:输入缓和曲线长度“JDL=”?N:输入平曲线交点里程“JDX=”?U:输入交点X坐标,当利用1JDZB程序时,不用再次输入“JDY=”?V:输入交点Y坐标,当利用1JDZB程序时,不用再次输入“F=”?F:输入起边方位角,当利用1JDZB程序时,不用再次输入180/R/π→Z:ZL/2→B: “B=”:B►DMS▲缓和曲线角“P=”:L^(2)/(24R)-L^(4)/(2688R^(3))→P▲内移距“Q=”:L/2-L^(3)/(240R^(2))+L^(5)/(34560R^(4))→Q▲切线增长“T=”:(R+P)tan(Abs(A/2))+Q→T▲显示平曲线切线长度“E=”:(R+P)/Cos(Abs(A/2))-R→E▲显示平曲线外距值“L=”:(Abs(A)-2B)/Z+2L→o▲显示平曲线曲线长度“D=”:2T-o→D▲显示球曲差30→DimZ“ZH=”:N-T→Z[1]▲显示直缓点里程“HY=”:Z[1]+L→Z[2]▲显示缓圆点里程“QZ=”:Z[1]+o/2→Z[3]▲显示曲中点里程“YH=”:Z[1]+o-L→Z[4]▲显示圆缓点里程“HZ=”:Z[1]+o→Z[5]▲显示缓直点里程“ZHX=”:U+Tcos(F+180)→Z[7]▲显示直缓点X坐标“ZHY=”:V+Tsin(F+180)→Z[8]▲显示直缓点Y坐标“HZX=”:U+Tcos(F+A)→Z[15]▲显示缓直点X坐标“HZY=”:V+Tsin(F+A)→Z[16]▲显示缓直点Y坐标0→C:0→W:L-L^(3)/(90R^(2))→C:ZL/6→W:If A<0:Then -W→W: EIse W→W: If End:“HYX=”:Z[7]+Ccos(F+W)→Z[9]▲显示缓圆点X坐标“HYY=”:Z[8]+Csin(F+W)→Z[10]▲显示缓圆点Y坐标“YHX=”:Z[15]+Ccos(F+A+180-W)→Z[13]▲显示圆缓点X坐标“YHY=”:Z[16]+Csin(F+A+180-W)→Z[14]▲显示圆缓点Y坐标If A<0:Then -B→B:EIse B→B:If End:0→S:0→C:0→W:o/2-L→S:SZ/2→W:2Rsin(W)→C:If A<0:Then -W→W: EIse W→W:If End:“QZX=”:Z[9]+Ccos(F+B+W)→Z[11]▲显示曲中点X坐标“QZY=”:Z[10]+Csin(F+B+W)→Z[12]▲显示曲中点Y坐标LbI8:“LP=”?→M:Prog“3ZBJS”:Goto8 输入放样点P里程3、子程序:3ZBJS20→DimZ0→S:0→W:0→D:0→G:If M≤Z[1]:Then F+180→W:F+90→G:N-M→S:U→P:V→Q:Goto5: Else If M≤Z[2]:Then M-Z[1]→S:Z[7]→P:Z[8]→Q:Goto1:Else If M<Z[4]:Then M-Z[2]→S:Z[9]→P:Z[10]→Q:Goto2:Else If M<Z[5]:Then Z[5]-M→S:Z[15]→P:Z[16]→Q:Goto1: Else F+A→W:W+90→G:T+M-Z[5]→S:U→P:V→Q:Goto5:If End:LbI 1:ZS^(2)/(6L)→W:3W→G:S-S^(5)/(90R^(2)L^(2))→S:If A<0:Then -W→W:-G→G:EIse W→W:G→G:If End:If M<Z[2]:Then F+W→W:F+G+90→G:EIse F+A+180-W→W:F+A+180-G-90→G:If End:Goto5:LbI 2:SZ/2→W:2W→G:2Rsin(W)→S:If A<0:Then -W→W:-G→G:EIse W→W:G→G:If End:F+B+W→W:F+B+G+90→G:Goto5:LbI 5:“X=”:P+Scos(W)→Z[13]▲“Y=”:Q+Ssin(W)→Z[14]▲Z[13]→X:Z[14]→Y:Prog“J”:显示放样点(前视点)距离和方位角Goto6:LbI 6:“BZ=”?D: 输入偏距(左“-”右“+”)“X=”:Z[13]+Dcos(G)→Z[17]▲“Y=”:Z[14]+Dsin(G)→Z[18]▲Z[17]→X:Z[18]→Y:Prog“J”显示放样点(前视点)距离和方位角4、子程序:JI=PoI(X-H,Y-K):If J<0:Then J+360→J:EIse J→J:IfEnd:"S=":I▲"F=":J►DMS▲。
5800P合导线平差

5800P附(闭)合导线坐标平差程序名:DX-XY-PC程序清单:32 → DimZ (额外变量寄存器定义 ( 本程序以 11 个导线边数定义 , 如超过应修改此定义和程序内额外变量寄存器的变量表达式 ) ) : Lb1 0: " DX-DS (导线点数(含终点)) = "? W: " YZ-ZD-X (已知终点 X 坐标) = "?A: " YZ-ZD-Y (已知终点 Y 坐标) = "? B: " SC-ZD-X (实测终点 X 坐标) = "? C: " SC-ZD-Y (实测终点 Y 坐标) = "? D:C-A → E:D-B → F: √ (E2+F2) → G: Cls:Fix 4: " X-BHC ( X 闭合差) = " :Locate 7,1,E: " Y-BHC ( Y 闭合差) = " :Locate 7,2,F: " BC-BHC (边长闭合差) = ":Locate 8,3,G ◢Cls: " YZ-QD-X (己知起点 X 坐标) = "? O :O→ Z[31]: " YZ-QD-Y (己知起点 Y 坐标) = "?P:P → Z[32]: 0 → H:0 → N: Lb1 1:N+1 → N: Cls: " N= ":Locate 4,1,N ◢" SCD-X (实测点 X 坐标) = "?X:X → Z[N]: " SCD-Y (实测点 Y 坐标) = "?Y:Y → Z[N+11]: Po1 ( X-O, Y-P ): I → Z[N+21]: H+I → H:X →O: Y → P: If N<W: Then Goto 1:IfEnd : If N=W: Then Goto 2:IfEnd ←」L b1 2:H ÷ G → K: Cls:Fix 5: " DX-QC (导线全长) = " :Locate 7,1,H: " DX-QC-XD-BHC-FM (导线全长相对闭合差的分母) = " :Locate 1,3,K ◢0 → N:0 → R:If 1 ÷ K <1 ÷ 10000 (导线全长相对闭合差允许值的分母) : Then Goto 3:E1se Goto 4: IfEnd ←」Lb1 3:N+1 → N: Cls: " N= ":Locate 4,1,N ◢Po1 ( Z[N]-Z[31] , Z[N+11]-Z[32] ):R+Z[N+21] → R:Z[N]-(ER) ÷ H → U:Z[N+11]-(FR) ÷ H → V: Cls:Fix 4: " N= " :Locate 4,1,N: " PCH-X (平差后的 X 值) = " :Locate 7,2,U: " PCH-Y (平差后的 Y 值)= ":Locate 7,3,V ◢0 → Z[31]:0 → Z[32]: Z[N] → Z[31]:Z[N+11] → Z[32]: If N<W: Then Goto 3:E1se Goto 5:IfEnd ←」Lb1 4: " BHC (闭合差) - CX (超限)⇒ CX (重新) -CL (测量)"◢Lb1 5: "FH → 1 ,TC → 0 "? Z:Z=1 ⇒ Goto 0: Z=0 ⇒ Return程序功能:本程序可以利用全站仪在闭(符)合导线点上实测的 X 、 Y 坐标值,计算出坐标闭合差、边长闭合差和导线全长闭合差以后,若闭合差小于允许闭合差,则将坐标闭合差反号后按各导线边长占导线全长的比例进行改正数计算,正确的计算出各导线点的平差后坐标值;若闭合差大于允许闭合差,则自动停止计算,显示 BHC (闭合差)→ CX (超限)⇒ CX (重新) -CL (测量)。
卡西欧fx-5800p计算器测量程序
卡西欧fx-5800p计算器测量程序(作者:水江华)1.坐标反算程序"ZBFS QH1-4"◢Deg:Fix 3←┘"X+YiS(m)="?A←┘Lb1 0:"X+YiE(m),0=>END="?B←┘Abs(B)=0=>Goto E←┘Arg(B-A)→JJ<0=>J+360→J"DIST(m)=":Abs(B-A)◢"α(DMS)=":J▶DMS◢Goto 0←┘Lb1 E:"ZBFS QH1-4=>END"2.坐标正算程序"ZBZS QH1-3"◢Deg:Fix 3←┘"XS(m)= "?A:"YS(m)= "?B←┘Lb1 1:"DIST(m)= "?L←┘If L≤0:Then Goto 2:IfEnd←┘"α(Deg)="?R←┘A+Lcos(R)→C←┘B+Lsin(R)→D←┘Fix 3:"XE(m)= ":C◢"YE(m)= ":D◢Goto 1←┘Lb1 2:"ZBZS QH1-3=>END"3.单一闭、附合导线近似平差程序"BFHDXPC QH1-8"◢Deg:Norm 1:FreqOn←┘n→N←┘If List Y[N]=0:Then N-1→DimZ:Goto 0←┘Else N→DimZ:Goto 1: IfEnd←┘Lb1 0: "CLOSE Or CONECT TRA VE"◢"ANGLE NUM=":N◢"SIDE NUM=":N-1◢"UNKNOWN P NUM=":N-2◢"CLOSE(0),CONNECT(≠0)="?→Z←┘Fix 3:"XA(m),≤0=>αA→B(Deg)="?A←┘If A>0:Then "YA(m)= "?B:Else "αA→B(Deg)="?R:IfEnd←┘"XB(m)= "?C:"YB(m)= "?D←┘C+Di→U:U→V←┘If A>0:Then Pol(C-A,D-B):Cls←┘J<0=>J+360→J:J→R←┘"DIST A→B(m)=":I◢"αA→B(DMS)=":R▶DMS◢IfEnd←┘If Z≠0:Then "XC(m)= "?E:"YC(m)= "?F←┘E+Fi→V←┘"XD(m),≤0=>αC→D(Deg)="?G←┘If G>0:Then "YD(m)= "?H←┘Pol(G-E,H-F):Cls←┘J<0=>J+360→J:J→S←┘"DIST C→D(m)=":I◢"αC→D(DMS)=":S▶DMS◢Else "αC→D(Deg)="?S:IfEnd←┘Else If R>180:Then R-180→S:Else R+180→S:IfEnd←┘IfEnd←┘∑y→M←┘For 1→I To N←┘If I=1:Then R+List X[I]→L:Else L+List X[I]→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘Nent←┘3600(L-S)→T←┘"α CLOSE ERROR(S)=":T◢40→W←┘Abs(T)>W=>"α CLOSE ERROR OVRE!"←┘-T÷N÷3600→P:0→O←┘For 1→I To N←┘If I=1:Then R+List X[I]+P→L←┘Else L+List X[I] +P→L:IfEnd←┘If L>180:Then L-180→L:Else L+180→L:IfEnd←┘If I<N:Then List Y[I]<L→Z[I] :Z[I]+O→O:IfEnd←┘Nent←┘3600(L-S)→T←┘"CHECK α CLOSE ERROR(S)=":T◢U+O-V→O←┘Int(M÷Abs(O))→K←┘"DELTA X(m)= ":ReP(O)◢"DELTA Y(m)= ":ImP(O)◢"RELAT CLOSE ERROR=1÷":K◢K<4000=>"RELAT CLOSE ERROR OVER! "←┘For 1→I To N-1←┘Z[I]-OList Y[I]÷M→X←┘If I=1:Then U+X→Y:Else Y+X→Y:IfEnd←┘Norm 1:"POINT n=":I◢Fix 3:"X(m)= ":ReP(Y)◢"Y(m)= ":ImP(Y)◢Nent←┘Y-V→Q←┘"CHECK X (m)= ":ReP(Q)◢"CHECK Y (m)= ":ImP(Q)◢Goto E←┘Lb1 1:"NO DIRECT TRA VE"◢"ANGLE NUM=":N-1◢"SIDE NUM=":N◢"UNKNOWN P NUM=":N-1◢"XA(m)= "?A:"YA(m)= "?B←┘"XB(m)= "?C:"YB(m)= "?D←┘A+Bi→U:C+Di→V←┘0→H:U+List Y[1]<H→Z[1]←┘For 1→I To N-1←┘H+List X[1]→H←┘If H>180:Then H-180→H:Else H+180→L:IfEnd←┘以下未完程序由读者完成。
fx-5800P_单一闭附合图根水准路线近似平差程序PM3-6N

基于统计串列输入观测数据的单一闭附合图根水准路线近似平差程序(PM3-6N)
(1) 计算原理
单一闭附合图根水准路线近似平差的原理是,将高差闭合差反号、按测段路线长或测站数比例
分配计算各水准测段的高差改正数,并据此计算出未知点的高程。
(2) 程序——PM3-6N,占用内存 544 字节。
"START H(m)="?A
输入起点已知高程
"END H(m)="?B
输入终点已知高程,闭合水准路线时为起点已知高程
Σx¼X:Σy¼L
累加高差与路线长
A+X-B¼C
计算高差闭合差
If P=1:Then 0.04 (L)¼W:Else 0.012 (L)¼W:IfEnd 图根水准高差闭合差限差
"h CLOSE ERROR(mm)=":1000C\ 显示高差闭合差
"CLOSED Or CONNECTING MAPPING LEVEL PM3-6N"\
显示程序标题
Fix 3:FreqOn n¼N:N¼DimZ
基本设置 从统计串列获取测段数,定义额外变量
"h NUM=":N\
显示测段高差数
"UNKNOWN POINT NUM=":N-1\ 显示未知点数
"LEVEL:PLATE(1) Or HILLY(Else)="?P 输入 1 代表平坦,其余数代表山地
站数)。当闭合差超限时,程序给出提示"CLOSE ERROR OVER!",并继续计算。 程序按从起点到终点方向的顺序分别显示测段高差平差值、未知点高程值及检核计算结果。
CASIOfx-5800P矩阵编程计算器测量程序集锦梁宝禄

测量程序集锦梁宝禄2008.7.12CASIO fx-5800P 矩阵编程计算器测量程序集锦梁宝禄1、单交点对称基本形曲线偏角法中桩放样计算最近看了覃辉老师的CASIO fx-5800P 矩阵编程计算器《工程测量与公路测设程序加油站操作手册》后,发现个别语句中缺乏命令或符号,如PR16主程序中两句Else If F=0:Then X[K] List X[K+1]都缺List,程序不能正常运行,应该修改为Else If F=0:Then List X[K] List X[K+1]。
本人根据CASIO fx-5800P 矩阵编程计算器的特点整编了这个程序。
与覃辉老师的CASIO fx-5800P 矩阵编程计算器《工程测量与公路测设程序加油站操作手册》中的PR13、 PR16相比,它不管有没有缓和曲线都能用(没有缓和曲线提示Lh=?时,输入0即可),而且本程序还考虑到了有缓和曲线的圆曲线测设多数在HY、YH上置镜,设置了提示是否在HY、YH 上置镜,并将在HY、YH 上置镜的偏角、弦长计算出来,用起来更方便。
主程序:Deg:ClrStat:FreqOn:Norm 1 设置角度单位为十进制度15 DimZ 定义额外数组变量"JDZH="?Z 输入以m 为单位的交点桩号"JDLXZJ(-L,+R)="?D 输入交点路线转角,左偏为负,右偏为正D Z[6]:Abs(D) D 保存转角及符号Fix 3"R="?R 输入圆曲线半径"Lh="?H 输入缓和曲线长"ZZJJL=" ?I 输入整桩间距H2÷(24R) P:0.5H-H^(3)÷(240R2 ) Q 计算切线增量与内移值(R+P)tan(0.5D)+Q T 计算切线长90H÷( πR) B 计算缓和曲线偏角πR(D-2B)÷180 A 计算圆曲线长A+2H L 计算曲线长(R+P)cos(0.5D)^(-1)-R E 计算外距2T-L J:Fix 3 计算切曲差"T=":T 显示切线长"LY=":A 显示圆曲线长"L=":L 显示曲线长"E=":E 显示外距"J=":J 显示切曲差"B=":2B÷3 DMS 显示缓和曲线β角Z-T Z[1] 计算ZH 点桩号 1Z[1]+H Z[2] 计算HY 点桩号2Z[2]+0.5A Z[3] 计算QZ 点桩号3Z[3]+0.5A Z[4] 计算YH 点桩号4Z[4]+H Z[5] 计算HZ 点桩号5H=0 Goto 1 没有缓和曲线进入Lbl 1 "ZHZH=":Z[1] 显示ZH 点桩号 1"HYZH=":Z[2] 显示HY 点桩号2"QZZH=":Z[3] 显示QZ 点桩号3"YHZH=":Z[4] 显示YH 点桩号4"HZZH=":Z[5] 显示HZ 点桩号5Z[1] List X[1]:0 List Freq[1] 存储ZH 点桩号2 K 为计数变量赋初值H Z[10]:Prog "Z[10]-XY" 调子程序计算HY 或YH 点的独立坐标Z[13] Z[11]:Z[14] Z[12] 存储HY 点的独立坐标Int(Z[1]÷I)I+I List X[K] 计算并存储从ZH 点开始的第一个整桩号Prog "X[K]-HGC" 调子程序计算并显示弦切角G 与弦长C0 F 清除HY 点计算标记Do 计算ZH 点至QZ 点K+1 K 计数变量计数List X[K-1]+I List X[K] 计算并存储整桩号If List X[K]<Z[2] ZH~HY 点间Then Prog "X[K]-HGC" 调子程序计算ZH~HY 点间的点Else If F=0:Then List X[K] List X[K+1]Z[2] List X[K]Prog "X[K]-HGC" 调子程序计算HY 点1 F:K+1 K 标记HY 点已完成,计数变量计数,再计算逐桩点Prog "X[K]-HGC" 调子程序计算HY 点后的第一个整桩点Else Prog "X[K]-HGC" 调子程序计算HY~QZ 点间的点IfEnd:IfEndLpWhile List X[K]+I<Z[3] 还没有计算到 QZ 点时继续循环K+1 K 计数变量计数Z[3] List X[K] QZ 点的桩号Prog "X[K]-HGC" 调子程序计算QZ 点K+1 K 计数变量计数Int(Z[3]÷I)I+I List X[K]Prog "X[K]-HGC" 调子程序计算QZ 点开始的第一个整桩号0 F 清除YH 点计算标记Do 计算QZ~HZ 点间的点K+1 K 计数变量计数List X[K-1]+I List X[K] 计算并存储整桩号If List X[K]<Z[4] QZ~YH 点间Then Prog "X[K]-HGC" 调子程序计算ZH~HY 点间的点Else If F=0:Then List X[K] List X[K+1]Z[4] List X[K]Prog "X[K]-HGC" 调子程序计算YH 点1 F:K+1 K 标记YH 点已完成,计数变量计数,再计算逐桩点Prog "X[K]-HGC" 调子程序计算YH 点后的第一个整桩点Else Prog "X[K]-HGC" 调子程序计算YH~HZ 点间的点IfEnd:IfEndLpWhile List X[K]+I<Z[5] 还没有计算到HZ 点时继续循环 K+1 K:Z[5] List X[K]:0 List Freq[K] 存储HZ 点桩号0 List X[K]:2B÷3 List Y[K]Goto 2 完成计算进入Lbl 2Lbl 1"ZYZH=":Z[1] 显示ZY 点桩号 1"QZZH=":Z[3] 显示QZ 点桩号2"YZZH=":Z[5] 显示YZ 点桩号3Z[1] List X[1]:0 List Freq[1] 存储ZY 点桩号2 K 为计数变量赋初值Int(Z[1]÷I)I+I List X[K] 计算并存储从ZY 点开始的第一个整桩号 Prog "X[K]-GC" 调子程序计算并显示弦切角G 与弦长CDo 计算ZY 点至QZ 点K+1 K 计数变量计数List X[K-1]+I List X[K] 计算并存储整桩号Prog "X[K]-GC" 调子程序计算并显示弦切角G 与弦长CLpWhile List X[K]+I<Z[3] 还没有计算到 QZ 点时继续循环K+1 K 计数变量计数Z[3] List X[K] QZ 点的桩号Prog "X[K]-GC" 调子程序计算并显示弦切角G 与弦长CK+1 K 计数变量计数Int(Z[3]÷I)I+I List X[K] 计算并存储从QZ 点开始的第一个整桩号Prog "X[K]-GC" 调子程序计算并显示弦切角G 与弦长CDo 计算YZ 点至逐桩点的弦长K+1 K 计数变量计数List X[K-1]+I List X[K] 计算并存储整桩号Prog "X[K]-GC" 调子程序计算并显示弦切角G 与弦长CLpWhile List X[K]+I<Z[5] 还没有计算到 QZ 点时继续循环K+1 K:Z[5] List X[K]:0 List Freq[K] 存储YZ 点桩号Lbl 2Return没有缓和曲线时由逐桩点桩号计算弧长、弦切角与弦长子程序:X[K]-GC入口参数为逐桩点桩号 List X[K] ,计算出的弦切角存储在 List Y[K] ,弦长存储在 List Freq[K]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单一闭附合图根导线近似平差计算程序(PM3-1)(2) 程序PM3-1,占用内存1848字节。
"CLOSED Or CONNECTING MAPPING TRAVERSE PM3-1"显示程序标题Norm 1"CLOSED(0) Or CONNECTING(1)="?Z导线类型,0为闭合导线,1为附合导线"UNKNOWN POINT n="?P未知导线点数Deg:Fix 3设置十进制度为单位"XA(m),0 To BEAR A B(Deg)="?A输入已知点A的x坐标或输入≤0的数值If A>0:Then "YA(m)="?B:Else "BEAR A B(Deg)="?R:IfEndA>0时为输入A点y坐标,否则为输入A→B的方位角"XB(m)="?C:"YB(m)="?D输入已知点B的坐标If A>0:Then Pol(C-A,D-B):Cls计算A→B的方位角If J<0:Then J+360R:Else J R:IfEnd"DIST A B(m)=":I显示A→B的水平距离"BEAR A B(DMS)=":R显示A→B的方位角IfEndIf Z=1:Then "XC(m)="?E:"YC(m)="?F附合导线,继续输入已知点C的坐标"XD(m),0 To BEAR C D(Deg)="?G输入已知点D的x坐标或输入≤0的数值If G>0:Then "YD(m)="?H:Else "BEAR C D(Deg)="?S:IfEndG>0时为输入D点y坐标,否则为输入C→D的方位角If G>0:Then Pol(G-E,H-F):Cls计算C→D的方位角If J<0:Then J+360S:Else J S:IfEnd"DIST C D(m)=":I显示C→D的水平距离"BEAR C D(DMS)=":S显示C→D的方位角IfEndElse If R>180:Then R-180S:Else R+180S:IfEnd闭合导线计算A→B的反方位角"BEAR B A(DMS)=":S显示B→A方向的方位角IfEndClrStat:FreqOn清除统计串列List X,List Y,List Freq,打开频度串列0M累加边长和变量清零For 1I To P+1Norm 1:"POINT n=":I显示当前输入的观测数据计数"ANGLE(Deg)="?List X[I]输入水平角观测值"DIST(m)="?List Y[I]输入水平距离观测值List Y[I]+M M累加水平距离和If I=1:Then R+List X[I]L:Else List Freq[I-1]+List X[I]L:IfEnd推算导线边方位角If L>180:Then L-180L:Else L+180L:IfEndIf L>360:Then L-360L:IfEnd判断方位角是否大于360L List Freq[I]存储导线边方位角Next"LAST ANGLE(Deg)="?List X[P+2]输入最后一个水平角List Freq[P+1]+List X[P+2]LIf L>180:Then L-180L:Else L+180L:IfEndIf L>360:Then L-360L:IfEnd判断方位角是否大于360L List Freq[P+2]存储最后一个方位角3600(L-S)U以秒为单位的方位角闭合差Fix 1:"ANGLE CLOSE ERROR(S)=":U显示方位角闭合差60(P+2)W以秒为单位的方位角闭合差限差If Abs (U)>W:Then "ANGLE CLOSE ERROR OVER.":IfEnd显示角度闭合差超限-U÷(P+2)V计算角度改正数2DimZ:0Z[1]:0Z[2]定义额外变量数组用于存储坐标增量累加和For 1I To P+1分配角度改正数并计算导线边的坐标增量List X[I]+V÷3600List X[I]计算并存储改正后的角度If I=1:Then R+List X[I]L:Else List Freq[I-1]+List X[I]L:IfEnd推算导线边方位角If L>180:Then L-180L:Else L+180L:IfEndIf L>360:Then L-360L:IfEnd判断方位角是否大于360L List Freq[I]存储角度改正后的导线边方位角List Y[I]cos(L)X:List Y[I]sin(L)Y计算导线边坐标增量X+Z[1]Z[1]:Y+Z[2]Z[2]累加导线边坐标增量NextList Freq[P+1]+List X[P+2]+V÷3600L计算最后一条导线边的方位角If L>180:Then L-180L:Else L+180L:IfEndIf L>360:Then L-360L:IfEnd判断方位角是否大于360L List Freq[P+2]存储最后一条导线边的方位角3600(L-S)U以秒为单位的方位角闭合差检核计算"CHECK ANGLE CLOSE ERROR(S)=":U显示方位角闭合差检核结果If Z=0:Then Z[1]U:Z[2]V计算闭合导线的坐标增量闭合差Else C+Z[1]-E U:D+Z[2]-F V:IfEnd计算附合导线的坐标增量闭合差M÷(U2+V2)K计算导线全长相对闭合差Fix 3:"DELTA X(m)=":U显示导线X坐标增量闭合差"DELTA Y(m)=":V显示导线Y坐标增量闭合差Fix 0:"RELAT CLOSE ERROR=":K显示导线全长相对闭合差-U÷M U:-V÷M V计算坐标增量闭合差每米改正数If K<2000:Then "RELAT CLOSE ERROR OVER.":IfEnd显示全长相对闭合差超限2(P+1)DimZ定义额外变量数组用于存储未知点的坐标For 1I To P+1分配坐标闭合差并计算未知点的坐标List Y[I]cos(List Freq[I])X:List Y[I]sin(List Freq[I])Y计算导线边坐标增量X+UList Y[I]X:Y+VList Y[I]Y计算改正后的导线边坐标增量If I=1:Then C+X Z[2I-1]:D+Y Z[2I]Else Z[2(I-1)-1]+X Z[2I-1]: Z[2(I-1)]+Y Z[2I]:IfEndNorm 1:"POINT n=":I显示未知点号Fix 3:"XP(m)=":Z[2I-1]显示未知点的X坐标"YP(m)=":Z[2I]显示未知点的Y坐标NextIf Z=0:Then Z[2(P+1)-1]-C X:Z[2(P+1)]-D Y计算闭合导线的坐标检核结果Else Z[2(P+1)-1]-E X:Z[2(P+1)]-F Y:IfEnd计算附合导线的坐标检核结果"CHECK X(m)=":X显示X坐标检核计算结果"CHECK Y(m)=":Y显示Y坐标检核计算结果ClrStat:FreqOff清除统计串列List X,List Y,List Freq,关闭频度串列For 1I To P分配坐标闭合差并计算未知点的坐标Z[2I-1]List X[I]:Z[2I]List Y[I]将未知点的坐标存储到统计串列List X,List Y中Next"PM3-1END"(3) 程序说明程序先提示用户输入导线类型与未知点总数。
提示导线类型时,按键为选择闭合导线,其后要求输入A,B两点的已知坐标,或A→B的方位角及B点坐标;当输入A,B两点的已知坐标时,程序自动计算出A→B的方位角。
按键为选择附合导线,其后要求输入A,B,C,D四点的已知坐标,或A→B的方位角及B点坐标,C→D的方位角及C点坐标;当输入A,B两点的已知坐标时,程序自动计算出A→B的方位角;当输入C,D两点的已知坐标时,程序自动计算出C→D的方位角。
观测数据为导线边的水平角与水平距离,设导线点总数为P,则应输入P+2个水平角,P+1条水平距离。
程序设计闭合导线的方位角推算路线为A→B→1→2→3→……→B→A,附合导线的方位角推算路线为A→B→1→2→3→……→C→D,当水平角位于方位角推算路线左边时,角度应输入正数;水平角位于方位角推算路线右边时,角度应输入负数。
完成已知数据与观测数据的输入后,屏幕依次显示以秒为单位的方位角闭合差、分配方位角闭合差后的检核结果、x,y坐标增量闭合差、导线全长相对闭合差、未知点的坐标、坐标计算检核结果等。
用户输入的已知点坐标依次存储在变量A,B,C,D,E,F,G,H中,角度观测数据存储在统计串列List X中,边长观测数据存储在统计串列List Y中,两次推算的方位角存储在统计串列List Freq中。
计算完成后,为了便于用户使用计算成果,将全部未知点的坐标成果存储在统计串列中,其中X坐标存储在List X中,Y坐标存储在List Y中,同时关闭统计串列List Freq。
程序运行完成后,可以按(REG)键进入双变量统计回归模式查看未知点的坐标成果。