最新-01-30相机标定的原理与意义及opencv、matlab实现差异小结汇总
摄像机标定的基本原理实现及性能分析_小论文
摄像机标定的基本原理实现及性能分析_小论文1.采集标定图像:通过摄像机拍摄一系列已知的标定板图像,标定板上通常有明确的特征点或者标定物体,这些特征点被用来进行摄像机标定的计算。
2. 特征点提取:使用图像处理算法,如Harris角点检测或SIFT算法等,从标定图像中找到特征点,并提取其特征描述子。
3.特征点匹配:将标定板图像中的特征点与实际世界坐标点进行匹配,建立特征点之间的对应关系。
4.摄像机的内参数标定:通过已知的标定板图像和其对应的实际世界坐标点,利用摄像机模型的投影关系,计算出摄像机的内参数,包括焦距、主点和畸变参数等。
5.摄像机的外参数标定:利用摄像机的内参数和特征点的对应关系,通过最小化重投影误差的方法,估计出摄像机的外参数,包括旋转矩阵和平移矩阵。
6.误差评估:对标定结果进行误差评估和优化,例如通过重投影误差的计算和最小化、重复采样一致性算法(RANSAC)等方法,对标定的准确性进行验证和改进。
1.精度:即标定结果与实际情况之间的误差。
精度的评估通常通过计算摄像机内外参数的重投影误差来进行,重投影误差较小则说明标定结果较为准确。
2.稳定性:即标定结果对输入数据的变化的稳定性。
稳定性的评估可以通过在不同条件下进行多次标定实验,计算不同实验结果之间的差异之来进行。
3.鲁棒性:即标定方法对噪声和异常值的容忍能力。
鲁棒性的评估可以通过向标定图像中加入噪声或异常值,并观察标定结果的变化情况来进行。
4.计算效率:即标定过程所需的计算时间。
计算效率的评估可以通过记录标定过程的耗时来进行。
5.实际应用:即标定方法在实际应用中的可行性和有效性。
实际应用的评估可以通过将标定结果应用到三维重构、姿态估计等任务中,观察其效果和性能来进行。
总之,摄像机标定是计算机视觉领域中的一个重要研究课题,其基本原理是通过建立摄像机内外参数与实际世界坐标的对应关系,实现图像坐标与实际世界坐标之间的转换。
标定的实现包括采集标定图像、特征点提取与匹配、摄像机内外参数标定和误差评估等步骤。
基于MATLAB对相机标定的研究
基于MATLAB对相机标定的研究摘要:相机标定是对相机成像的逆过程求解,是建立二维图像坐标和三维世界坐标之间的对应关系,是机器视觉的重要组成部分。
文章对针孔相机成像原理进行分析,考虑相机成像过程的径向畸变和偏心畸变。
利用棋盘格标定原理,基于MATLAB对相机进行标定。
关键词:相机标定;MATLAB;二值化随着科技的迅猛发展,机器视觉越来越多的被运用到工业生产。
相机的标定是机器视觉的重要组成部分,是对由三维世界坐标到二维图像坐标的映射求解。
并广泛运用于逆向工程、空间测距、图像识别、3D电影、游戏等工程。
相机的标定方法分为两大类,分别为传统标定方法和自标定方法。
传统标定方法利用标定块的角点坐标和对应的图像坐标,计算出相机的内外参数,这种标定方法可以标定任意相机模型,标定过程复杂但是结果精确。
包括利用最优化算法的标定、考虑畸变补偿的两步法、张正友标定法。
自标定法是利用Krupp方程为相机建立绝对二次曲线曲面方程进行求解。
这种方法灵活性强,但是鲁棒性和标定结果相对较差。
1 相机的标定原理对相机进行标定首先需要建立相机的成像模型,首先利用针孔模型对相机的成像原理进行分析,然后考虑实际相机的畸变模型,利用张正友标定方法求解。
1.1 线性模型分析相机标定的针孔模型是利用小孔成像的原理来描述相机的成像模型。
针孔相机模型如下图1。
要描述针孔相机模型,需要介绍四种坐标以及这四种的坐标的相互关系。
如图1所示,世界坐标系(OW-XWYWZW)表示世界的绝对坐标,能描述相机及其物理的空间位置。
相机坐标(OC-XCYCZC)以相机的光心为坐标的原点,光轴为ZC轴,而XC、YC轴分别平行于图像坐标系的X,Y轴。
图像坐标(o-xy)是以光轴与图像平面的交点为原点,描述的成像的平面坐标。
图像像素坐标(o-uv)是图像的存储坐标,以图像左上端点为原点,以像素为单位描述图像其u、v轴分别平行于图像坐标的x、y轴。
其中fx=f/dx,dx表示像素在x轴方向的物理尺寸,f为相机的焦距。
摄像机标定技术的研究与应用
摄像机标定技术的研究与应用随着科技的不断发展,摄像机应用越来越广泛,从普通家庭摄像机、监控摄像机,到行车记录仪、工业机器视觉等,摄像机已经成为了人们生活、工作中必不可少的设备。
而在摄像机的应用过程中,为了保证摄像机的准确性和稳定性,摄像机标定技术也越来越受到了研究者和工程师们的关注。
一、摄像机标定技术的意义摄像机标定技术可以通过一系列的计算和校准来对摄像机进行精度校准,使摄像机的结果准确可靠,为后续的图像处理和识别技术提供了必要的前提条件。
同时,摄像机标定技术也为摄像机的应用提供了重要的技术保障。
二、摄像机标定技术的基本原理1、摄像机内部参数标定摄像机的内部参数指的是摄像机镜头的具体参数,包括焦距、主点坐标和畸变参数等。
对于不同的摄像机,这些参数的值都是不同的。
因此,摄像机标定的第一步就是对其内部参数进行标定。
一般情况下,使用三维点对来标定这些参数的数值,通过一系列的计算和校准,得到了摄像机的一些基本参数,如焦距、主点坐标和畸变参数等。
2、摄像机外部参数标定摄像机的外部参数指的是摄像机在三维空间中的位置和方向等参数。
通过标定摄像机的外部参数,可以将摄像机与三维物体建立起关系,并从中获取一些重要的图像信息。
一般情况下,使用多组三维点对来标定这些参数的数值,通过一系列的计算和校准,得到了摄像机在三维空间中的位置和方向等参数。
三、摄像机标定技术的应用摄像机标定技术在很多领域都有着广泛的应用和意义。
1、3D重建与模拟技术通过摄像机标定技术,可以捕捉真实世界中的三维信息,进而实现三维重建与模拟技术。
例如,以飞机机身的三维重建为例,通过多组摄像机对同一物体的拍摄,运用摄像机标定技术对每一组影像进行处理,最终得到了整个机身的三维图像和模型。
这种技术可以广泛应用于航空、汽车、机器人等领域。
2、工业制造领域摄像机标定技术在机器视觉和自动化生产中也有着广泛的应用。
例如,在智能制造中,通过安装摄像机和标定器,在流程中捕获数据并计算出每一台机器的性能参数,检测实时数据来提高制造效率和操作质量等,从而达到智能制造的目的。
相机标定的来龙去脉(详解标定原理、畸变矫正原理、使用经验)

相机标定的来龙去脉(详解标定原理、畸变矫正原理、使用经验)1、相机标定的意义在机器视觉领域,相机的标定是一个关键的环节,它决定了机器视觉系统能否有效的定位,能否有效的计算目标物。
相机的标定基本上可以分为两种,第一种是相机的自标定;第二种是依赖于标定参照物的标定方法。
前者是相机拍摄周围物体,通过数字图像处理的方法和相关的几何计算得到相机参数,但是这种方法标定的结果误差较大,不适合于高精度应用场合。
后者是通过标定参照物,由相机成像,并通过数字图像处理的方法,以及后期的空间算术运算计算相机的内参和外参。
这种方法标定的精度高,适用于对精度要求高的应用场合。
本文主要写一写后者,至于前者,是一个研究的难点和热点,以后有空再写。
2、坐标系的变换2.1、小孔成像的原理小孔成像的原理可以用下图来说明:2.2、各个坐标系的定义为了说明白,建议先介绍图像的坐标系,再逐步推广到世界坐标系,最后说明各个坐标系是如何变化的,从而给出相机的内参和外参。
2.2.1、像素坐标系像素坐标就是像素在图像中的位置。
一般像素坐标系的左上角的顶点就是远点,水平向右是u,垂直向下是v轴。
例如,在上图中,任意一个像素点的坐标可以表示为(ui,vi)。
2.2.2、图像坐标系在像素坐标系中,每个像素的坐标是用像素来表示的,然而,像素的表示方法却不能反应图像中物体的物力尺寸,因此,有必要将像素坐标转换为图像坐标。
将像素坐标系的原点平移到图像的中心,就定为图像坐标系的原点,图像坐标系的x轴与像素坐标系的u轴平行,方向相同,而图像坐标系的y轴与像素坐标系的v轴平行,方向相同。
在图中,假设图像中心的像素坐标是(u0,v0),相机中感光器件每个像素的物力尺寸是dx * dy,那么,图像坐标系的坐标(x,y)与像素坐标系的坐标(u,v)之间的关系可以表示为:写成矩阵的形式就为改写为齐次坐标的形式2.2.3、相机坐标系相机坐标系是以相机的光轴作为Z轴,光线在相机光学系统的中心位置就是原点Oc(实际上就是透镜的中心),相机坐标系的水平轴Xc与垂直轴Yc分别于图像坐标系的X轴和Y轴平行。
相机标定方法 matlab

相机标定方法 matlab相机标定是计算机视觉中的重要部分之一,它是通过测量图像上的物体点和其在相机坐标系下对应的点坐标,来估算相机内部参数和外部参数的过程。
相机内部参数通常包括焦距、主点位置和畸变参数等,它们决定了图像中的物体大小和位置。
相机外部参数包括相机的旋转和平移参数,它们决定了物体在相机坐标系下的坐标。
在 MATLAB 中,相机标定是通过图像处理工具箱中的“camera calibration”函数实现的。
在执行相机标定之前,需要准备一组称为标定板的物体,并在不同位置和姿态下拍摄多个图像。
标定板可以是长方形或正方形的棋盘格,也可以是自定义形状的物体,但是必须有已知的三维坐标和相应的二维坐标对。
以下是一个基本的相机标定流程,详细介绍了如何使用 MATLAB 实现相机标定。
1. 准备标定板需要准备一个标定板。
标定板可以是一个黑白棋盘格或自定义形状的物体。
在这里,我们将使用一个 9x7 的黑白棋盘格。
2. 采集标定图像接下来,需要拍摄多个标定图像,并记录标定板在每个图像中的位置和姿态。
对于每个图像,需要至少拍摄 10 张,以确保图像的质量和特征的稳定性。
可以使用不同的相机设置,例如不同的焦距、光圈和曝光时间等,来捕捉标定板的不同姿态。
3. 读取图像和标定板角点在 MATLAB 中,可以使用“imageDatastore”函数读取标定图像并创建一个图像数据存储对象。
接下来,可以使用“detectCheckerboardPoints”函数来检测标定板上的角点。
这个函数会返回一个 Nx2 的矩阵,其中 N 是标定板上检测到的角点数。
4. 定义标定板上角点的空间坐标现在需要定义标定板上角点的空间坐标。
这些坐标可以使用“generateCheckerboardPoints”函数自动生成。
该函数会返回一个 Nx3 的矩阵,其中N 是标定板上的角点数,每一行代表一个角点的空间坐标。
5. 进行相机标定用于相机标定的主要函数是“cameraCalibration”函数。
相机标定算法
相机标定算法摄像机标定是用来计算摄像机的运动参数的重要步骤,它可以把摄像机的物理坐标系与图像坐标系(像素坐标系)相关联。
与处理传统图像不同,机器视觉要处理数字信号,因此摄像机标定是机器视觉系统中一个非常重要的环节。
本文介绍了摄像机标定的原理、方法和结果分析,并介绍了常用的摄像机标定算法及其特点,以便于更多的应用。
一、摄像机标定的原理摄像机标定是一种从照片中识别物体坐标系的方法,它的原理是基于三角测量算法,需要在机器视觉系统中提前定义了实物内部的若干个特征点,根据这些临时点的位置,就可以计算出摄像机坐标系和图像坐标系之间的关系,从而实现机器视觉系统的精确测量。
二、摄像机标定的方法摄像机标定有多种方法,一般来说,采用的方法有极小二乘法(least squares)、基于模板的方法、单应矩阵,以及深度学习法等。
1.极小二乘法(least squares)极小二乘法是用来计算实物在摄像机空间中坐标系下的坐标,它可以通过计算实物上光学特征点在摄像机坐标系下的坐标与摄像机图像上由特征点检测得到的坐标之间的差值来实现标定,从而给出摄像机的参数。
2.基于模板的方法基于模板的方法也叫多视场校正,是最常见的摄像机标定方法之一,它的原理是将位置处于固定的模板特征点投射到摄像机图像坐标系中,并结合摄像机图像坐标系中的特征点来求解摄像机的参数。
由于模板的临时点可以很容易被识别,该方法简单快捷,是机器视觉系统中常用的标定方法。
3.单应矩阵单应矩阵法是比较常用的摄像机标定算法之一,它使用了两个平面上的点对来对摄像机运动进行标定,它可以将视场中的三维空间投射到图像平面形成新的图像,从而得到摄像机运动参数及内参。
4.深度学习法深度学习法是近几年新兴的技术,它也可用于摄像机标定。
该方法主要是使用深度学习网络来识别图像中的特征点,再针对特征点及其相对位置关系来对摄像机运动参数进行标定。
优点是数据量不大,标定效果较好,但由于目前深度学习技术尚不成熟,其计算速度和准确度仍是技术上的瓶颈。
相机标定过程(opencv)+matlab参数导入opencv+matlab标定和矫正
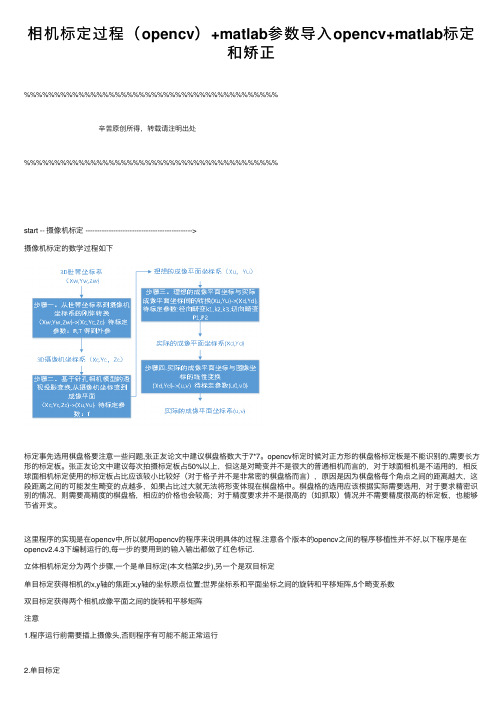
相机标定过程(opencv)+matlab参数导⼊opencv+matlab标定和矫正%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%⾟苦原创所得,转载请注明出处%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%start -- 摄像机标定 ---------------------------------------------->摄像机标定的数学过程如下标定事先选⽤棋盘格要注意⼀些问题,张正友论⽂中建议棋盘格数⼤于7*7。
opencv标定时候对正⽅形的棋盘格标定板是不能识别的,需要长⽅形的标定板。
张正友论⽂中建议每次拍摄标定板占50%以上,但这是对畸变并不是很⼤的普通相机⽽⾔的,对于球⾯相机是不适⽤的,相反球⾯相机标定使⽤的标定板占⽐应该较⼩⽐较好(对于格⼦并不是⾮常密的棋盘格⽽⾔),原因是因为棋盘格每个⾓点之间的距离越⼤,这段距离之间的可能发⽣畸变的点越多,如果占⽐过⼤就⽆法将形变体现在棋盘格中。
棋盘格的选⽤应该根据实际需要选⽤,对于要求精密识别的情况,则需要⾼精度的棋盘格,相应的价格也会较⾼;对于精度要求并不是很⾼的(如抓取)情况并不需要精度很⾼的标定板,也能够节省开⽀。
这⾥程序的实现是在opencv中,所以就⽤opencv的程序来说明具体的过程.注意各个版本的opencv之间的程序移植性并不好,以下程序是在opencv2.4.3下编制运⾏的,每⼀步的要⽤到的输⼊输出都做了红⾊标记.⽴体相机标定分为两个步骤,⼀个是单⽬标定(本⽂档第2步),另⼀个是双⽬标定单⽬标定获得相机的x,y轴的焦距;x,y轴的坐标原点位置;世界坐标系和平⾯坐标之间的旋转和平移矩阵,5个畸变系数双⽬标定获得两个相机成像平⾯之间的旋转和平移矩阵注意1.程序运⾏前需要插上摄像头,否则程序有可能不能正常运⾏2.单⽬标定(1).获取棋盘格图像for (int i=1; i<=19; i++)//输⼊左标定板图像{std::stringstream str;//声明输⼊输出流str << "./left" << i << ".jpg";//以名字⽅式把图像输⼊到流std::cout << str.str() << std::endl;//.str("")清除内容 .clear()清空标记位leftFileList.push_back(str.str());//.push_back从容器后向前插⼊数据leftBoardImage = cv::imread(str.str(),0);//⽤来显⽰即时输⼊的图像cv::namedWindow("left chessboard image");cv::imshow("left chessboard image",leftBoardImage);cv::waitKey(10);}(2).定义棋盘格的⾓点数⽬cv::Size boardSize(14,10)(3).程序定位提取⾓点这⾥建⽴的是理想成像平⾯(三维,第三维为0,单位为格⼦数)和图像坐标系(⼆维,单位是像素)之间的关系(a)⾸先声明两个坐标容器std::vector<cv::Point2f> imageCorners;//⼆位坐标点std::vector<cv::Point3f> objectCorners;//三维坐标点(b)初始化棋盘⾓点,令其位置位于(x,y,z)=(i,j,0),⼀个棋盘格为⼀个坐标值for (int i=0; i<boardSize.height; i++){for (int j=0; j<boardSize.width; j++){objectCorners.push_back(cv::Point3f(i, j, 0.0f));}}(c)直接使⽤opencv内函数找到⼆维⾓点坐标,并建⽴标定标定格⼦和实际坐标间的关系(像素级别)这个函数使⽤时,当标定板是长⽅形时可以找到⾓点,但是标定板是正⽅形时,就找不到,原因还未知.cv::findChessboardCorners(image, boardSize, imageCorners);(d)获得像素精度往往是不够的,还需要获得亚像素的精度cv::cornerSubPix(image,imageCorners, //输⼊/输出cv::Size(5,5),//搜索框的⼀半,表⽰在多⼤窗⼝定位⾓点cv::Size(-1,-1), //死区cv::TermCriteria(cv::TermCriteria::MAX_ITER + cv::TermCriteria::EPS,30, // max number of iterations//迭代最⼤次数0.01)); // min accuracy//最⼩精度注:TermCriteria模板类,取代了之前的CvTermCriteria,这个类是作为迭代算法的终⽌条件的,这个类在参考⼿册⾥介绍的很简单,我查了些资料,这⾥介绍⼀下。
matlab相机内参数标定原理 -回复

matlab相机内参数标定原理-回复导语:相机内参数标定是摄影测量中的一项重要工作,它通过确定相机的内部参数来提高图像的质量和精度。
本文将介绍相机内参数标定的原理和步骤,以及在Matlab中进行相机标定的具体实现。
一、相机内参数标定的意义和概述(150字)相机内参数是指相机的内部构造和特性,包括焦距、主点位置、像素尺寸、畸变等。
标定相机的内参数可以提高图像的质量和精度,用于计算三维空间中点的坐标。
相机内参数标定是摄影测量的关键步骤之一,对于计算机视觉、机器人导航等应用领域起着重要的作用。
二、相机内参数标定的原理(300字)相机内参数标定的原理是基于针孔成像模型,即相机捕捉到的物体影像是通过相机的中心投影到成像平面上的。
由于相机存在像素尺寸不一致、镜头畸变等问题,所以需要通过标定来确定相机的内参数。
相机内参数标定主要包括焦距、主点位置、径向畸变和切向畸变等参数的确定。
其中,焦距和主点位置确定相机的相对尺度和相对位置,径向畸变参数通过拟合成像圆的畸变效果实现,切向畸变参数通过拟合成像椭圆的畸变效果实现。
标定相机的过程通常需要采集多组不同位置和姿态的标定板图像,并通过标定板上已知的特征点来计算出相机的内参数。
这些特征点通过角点检测算法获取,然后通过最小二乘法拟合得到相机的内参数矩阵。
三、Matlab相机内参数标定的步骤(600字)在Matlab中,可以使用Computer Vision Toolbox提供的函数来实现相机内参数标定。
以下是一步一步的实现过程:1. 准备标定板:选择一个标定板,常见的有棋盘格、圆点标定板等。
确保标定板的特征点能够被准确检测到。
2. 采集标定板图像:在不同位置和姿态下,使用相机采集多组标定板图像。
图像的数量越多,标定结果越准确。
3. 检测标定板角点:使用角点检测算法,如Harris角点检测或亚像素角点检测,来获取标定板图像中的特征点坐标。
4. 优化角点坐标:使用亚像素精确化算法对检测到的角点坐标进行优化,提高标定的精度。
matlab 相机标定原理
matlab 相机标定原理Matlab相机标定原理相机标定是计算机视觉中的重要任务之一,它是指确定相机的内部参数和外部参数的过程。
内部参数包括焦距、主点位置等,外部参数包括相机的位置和朝向。
相机标定的目的是为了能够准确地将图像坐标与现实世界坐标进行对应,从而实现图像测量、三维重建等应用。
Matlab是一种强大的数值计算软件,提供了许多用于相机标定的工具和函数。
接下来,我们将介绍Matlab中相机标定的原理和方法。
相机标定的基本原理是利用已知的物体空间坐标和对应的图像坐标之间的关系来确定相机的内部参数和外部参数。
这个关系可以表示为以下的数学模型:s * [u, v, 1]T = K * [R | t] * [X, Y, Z, 1]T其中,s是一个尺度因子,表示图像坐标和物体空间坐标之间的比例关系;[u, v]是图像坐标;K是相机的内部参数矩阵,包括焦距和主点位置等;[R | t]是相机的外部参数矩阵,包括相机的旋转矩阵R 和平移向量t;[X, Y, Z]是物体空间坐标。
在Matlab中,可以使用相机标定工具箱(Camera Calibration Toolbox)来进行相机标定。
该工具箱提供了一组函数,用于实现相机标定的各个步骤,包括图像采集、角点检测、标定参数计算等。
需要采集一组包含已知物体的图像,这些图像需要涵盖不同的视角和距离。
然后,使用角点检测函数来自动检测图像中的角点,这些角点是用于计算相机参数的关键点。
接下来,使用标定函数来计算相机的内部参数和外部参数。
标定函数会根据已知的图像坐标和物体空间坐标之间的对应关系,通过最小化重投影误差来确定相机参数。
重投影误差是指通过已知的相机参数将物体空间坐标投影到图像平面上得到的图像坐标与实际图像坐标之间的差异。
可以使用标定结果来进行图像测量、三维重建等应用。
Matlab提供了一系列函数,用于将图像坐标转换为物体空间坐标,或将物体空间坐标转换为图像坐标。
Matlab中的图像配准和摄像机标定方法

Matlab中的图像配准和摄像机标定方法摄影和图像处理是现代科学技术中的重要组成部分。
无论是计算机视觉、机器人技术还是虚拟现实,图像配准和摄像机标定是其中不可或缺的环节。
本文将探讨Matlab中的图像配准和摄像机标定方法,并探讨它们的应用及意义。
图像配准是指通过空间变换将一个或多个图像对准,在同一坐标系下进行比较、融合或者进一步处理。
对于各种图像处理应用,如图像拼接、医学影像分析、人脸识别等都涉及到图像配准。
Matlab提供了一系列函数和工具箱来帮助用户进行图像配准。
图像配准的一个常见任务是图像拼接。
当存在多幅具有重叠区域的图像时,将它们无缝拼接成一幅大图像是很有意义的。
Matlab中的`imregister`函数可以实现图像的配准和拼接。
其原理是通过计算两幅图像之间的相似度来确定空间变换的参数。
具体来说,可以使用比较两图像之间的亮度、颜色、纹理等特征的方法来计算相似度,并通过优化方法寻找最佳的空间变换。
通过该函数,可以实现多幅图像的拼接,从而获得更大视野的图像。
图像拼接在地理信息系统、遥感等领域具有广泛的应用。
另一个重要的图像配准任务是医学影像分析。
在医学领域,常常需要对多幅不同时间、不同成像设备下的医学影像进行配准。
这种配准可以帮助医生实现精确的对比,从而提升诊断效果。
Matlab中的`imregtform`函数可以用于医学影像的配准。
该函数可以根据基准图像和待配准图像之间的特征点进行匹配,并计算出相应的空间变换矩阵。
这些变换矩阵可以用于将待配准图像变换到基准图像的坐标系下。
医学影像配准在疾病筛查、手术导航等方面具有重要的作用。
除了图像配准,摄像机标定也是计算机视觉领域中的关键问题。
摄像机标定是通过测量和计算相机的内外参数,来校正图像中的畸变,从而获得更加准确的图像信息。
Matlab提供了`cameraCalibrator`工具箱,可以帮助用户进行摄像机标定。
其原理是通过在标定板上放置一系列已知位置的标定点,并使用相机拍摄这些标定板,根据标定点的图像坐标和实际世界坐标的对应关系,计算摄像机的内外参数。
相机标定的原理与意义及OpenCVMatlab实现差异小结
2018-01-30 相机标定的原理与意义及OpenCV、Matlab实现差异小结分类:OpenCV点滴2018-01-30 20:35 2292人阅读评论(3> 收藏举报本文是一篇关于相机标定意义和原理的个人总结,包含了OpenCV和Matlab中常用的相机标定函数的注解。
相机标定是机器视觉的基础,标定结果的好坏直接决定了机器视觉的系统精度,作用可见一斑。
在这一年半的时间里,我个人也是随着实验和程序的进一步理解,对标定的原理和意义有了更多的想法。
同样,由于博文的关系,仍有一些朋友会常常询问标定的程序问题。
本人的2018-05-17OpenCV标定程序的问题也多次被朋友询问,由于当时对标定的认识还不够系统,因此现在认为该文对标定的意义和原理有很多误解,并在此推荐一些较好的博文拱大家学习:双目测距与三维重建的OpenCV实现问题集锦<一)图像获取与单目标定;双目测距与三维重建的OpenCV实现问题集锦<二)双目标定与双目校正;双摄像头测距的OpenCV实现;分享一些OpenCV实现立体视觉的经验;下面结合本人的毕业论文及一年半来对机器视觉的学习,对相机标定的意义和原理进行叙述。
1.单目相机模型单目相机模型中的三种坐标系关系如图1所示,相机坐标系即是以光轴中心O为原点的坐标系,其z轴满足右手法则,成像原点所代表平面即为像平面坐标系<实际应用中,均以图像左上角为坐标系原点),实际物体坐标系即为世界坐标系。
图1 单目相机模型的三坐标系统关系其中,在世界坐标系的值为,是在像平面坐标系的投影点,其相机坐标系的值为。
是相机坐标系轴与像平面夹角,一般情况下轴与像平面垂直,值为。
且相机坐标系与像平面平行,为相机的焦距。
对于从相机坐标系到像平面坐标系的变换,像平面坐标系是用像素单位来表示的,而相机坐标系则是以毫M为单位来表示,因此,要完成改变换过程就需要先得到像平面的像素单位与毫M单位之间的线性关系。
matlab 标定工具箱解读
matlab 标定工具箱解读matlab标定工具箱是一个用于相机标定和立体视觉标定的强大工具。
相机标定是在摄像机成像过程中,将像素坐标和实际世界坐标之间的映射关系建立起来的过程。
立体视觉标定是将两个或多个相机的相对位置和内部参数进行估计的过程。
本文将详细介绍matlab标定工具箱的使用方法,包括相机标定、立体视觉标定以及标定结果的评估与应用。
一、相机标定1. 数据采集在进行相机标定之前,首先需要准备一组由摄像机拍摄的标定图像。
标定图像中应该包含已知尺寸的标定板,比如棋盘格。
在matlab标定工具箱中,先使用`cameraCalibrator`函数创建一个相机标定应用。
然后可以使用`cameraCalibrationDatastore`函数读取图像文件,或者直接使用采集视频流的方式获取图像数据。
2. 标定器创建与运行在标定工具箱中,可以通过以下几个步骤来创建相机标定器:a) 使用`cameraCalibrator`函数创建一个相机标定应用。
可以选择不同的标定模型和算法。
b) 通过`addImage`函数向标定应用中添加标定图像。
可以通过手动添加单张图像或者批量添加整个图像文件夹。
c) 使用`estimateCameraParameters`函数估计相机内部参数和畸变参数。
这个过程将根据已添加的标定图像计算出相机的内部参数矩阵、畸变系数和误差估计等。
3. 标定结果评估与保存一旦相机标定器创建完成,可以通过`showExtrinsics`函数来可视化标定后的结果。
使用该函数可以显示相机在不同位置和姿态下的外部参数估计结果。
同时,还可以通过`showReprojectionErrors`函数来显示重投影误差的直方图和统计信息。
重投影误差是指标定后的相机将标定板三维点投影回图像上的二维点与实际标定板上的二维点之间的差异。
二、立体视觉标定1. 数据采集进行立体视觉标定时,需要准备一组由两个摄像机同时拍摄的标定图像对。
相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)

相机标定简介与MatLab相机标定⼯具箱的使⽤(未涉及原理公式推导)⼀、相机标定的⽬的确定空间物体表⾯某点的三维⼏何位置与其在图像中对应点之间的相互关系,建⽴摄像机成像的⼏何模型,这些⼏何模型参数就是摄像机参数。
⼆、通⽤摄像机模型世界坐标系、摄像机坐标系和像平⾯坐标系都不重合。
同时考虑两个因素:(1)摄像机镜头的畸变误差,像平⾯上的成像位置与线性变换公式计算的透视变换投影结果有偏差;(2)计算机中图像坐标单位是存储器中离散像素的个数,所以像平⾯上的连续坐标还需取整转换。
摄像机参数l摄像机内部参数(Intrinsic Parameters)摄像机坐标和理想坐标系之间的关系图像坐标系、摄像机坐标系The list of internal parameters:Focal length(焦距): The focal length in pixels is stored in the 2x1 vector fc.Principal point(主点): The principal point coordinates are stored in the 2x1 vector cc.Skew coefficient (偏斜系数): The skew coefficient defining the angle between the x and y pixel axes is stored in thescalar alpha_c.Distortions (畸变): The image distortion coefficients (radial and tangential distortions) are stored in the 5x1 vector kc.l 摄像机外部参数 (Extrinsic Parameters)摄像机在世界坐标系⾥的位置和⽅向摄像机坐标系、世界坐标系主要包括:旋转矩阵 R 的9个参数和平移矩阵的3个参数。
标定板原理
标定板原理
标定板是一种用于相机校准的工具,它可以帮助我们调整相机的焦距、畸变、色彩等参数,使得拍摄出来的照片更加准确、真实。
那么,标定板的原理是什么呢?
我们需要了解相机的成像原理。
相机的成像是通过镜头将光线聚焦在感光元件上,形成一张照片。
但是,由于镜头的制造和使用过程中的误差,会导致照片出现畸变、色差等问题。
因此,我们需要对相机进行校准,以消除这些误差。
标定板就是用来进行相机校准的工具。
它通常是一张印有黑白格子或圆点的纸片,这些格子或圆点的大小和间距都是已知的。
我们将标定板放在相机前方,拍摄下来的照片就可以用来进行校准了。
具体来说,标定板的原理是通过分析照片中格子或圆点的形变,来计算出相机的畸变、焦距、色彩等参数。
这个过程需要借助计算机软件来完成,比如OpenCV、MATLAB等。
在进行标定之前,我们需要先确定标定板的大小和摆放位置。
一般来说,标定板应该占据照片的大部分区域,而且要保证标定板的平面与相机的成像平面平行。
此外,我们还需要拍摄多张照片,以不同的角度和距离来覆盖尽可能多的情况。
标定板的原理虽然比较复杂,但是它可以帮助我们提高相机的成像
质量,让照片更加真实、准确。
因此,如果你是一名摄影爱好者或者专业摄影师,不妨尝试一下使用标定板来校准相机,相信你会有更好的拍摄体验和成果。
matlab相机标定工具箱原理

matlab相机标定工具箱原理Matlab相机标定工具箱原理相机标定是计算机视觉中的重要问题,通常是指为计算机视觉系统提供准确的相机内参数和外参数的过程。
内参数包括焦距、主点、畸变等,外参数包括相机在世界坐标系中的位置和方向。
相机标定的目的是确定这些参数,以便后续的图像处理和计算机视觉应用。
Matlab相机标定工具箱是一个流行的相机标定工具,它提供了一系列的函数,可以方便地进行相机标定。
Matlab相机标定工具箱的原理基于张正友的相机标定方法。
该方法基于一组已知的三维点和它们在相机中的二维投影点,通过最小二乘法计算相机内外参数。
具体来说,该方法通过最小化重投影误差来求解相机参数。
重投影误差是指将三维点投影到图像平面上后,再将其反投影回三维空间,并计算其与原始三维点的距离。
最小二乘法的目标是最小化所有重投影误差的平方和。
通过这种方法,可以得出相机内部参数矩阵、畸变系数和相机的外部旋转和平移矩阵。
这些参数可以用来对新的图像进行校正和测量。
Matlab相机标定工具箱的使用非常简单。
首先需要准备一组三维点和它们在相机中的二维投影点。
这些点可以由人工测量或通过三维扫描获取。
然后,将这些点作为输入,使用Matlab相机标定工具箱中的函数进行相机标定。
具体而言,可以使用calibrateCamera函数来计算相机参数,使用undistortImage函数来校正图像畸变。
在计算相机参数时,需要指定标定板的大小和格子的数量,以及每个格子的大小。
这些参数对标定结果的准确性有重要影响。
可以使用Matlab相机标定工具箱中的showExtrinsics函数来可视化相机的外部参数,以便更好地理解相机的朝向和位置。
除了张正友的相机标定方法,Matlab相机标定工具箱还支持其他标定方法,如Tsai方法和Bouguet方法。
这些方法在计算相机参数时采用不同的技术和假设,适用于不同的场景和需求。
Matlab相机标定工具箱提供了一些函数来比较这些方法的性能和准确性,以便选择最适合的方法。
使用Matlab进行标定与定位的技巧

使用Matlab进行标定与定位的技巧引言:随着计算机技术的不断进步,标定与定位在现代科学研究与工程应用中变得越来越重要。
而Matlab作为一种广泛应用于科学计算的工具,被广泛应用于标定与定位的研究与开发中。
本文将介绍使用Matlab进行标定与定位的技巧,包括标定理论和方法、定位算法与模型等。
一、标定理论与方法1.1 相机标定相机标定是进行摄像机内外参数确定和畸变纠正的过程。
在Matlab中,可以使用Camera Calibration Toolbox进行相机标定操作。
首先,需要准备一些用于标定的图像,这些图像中应包含已知参数(例如标定板大小和格点数)的标定板。
然后,在Matlab中加载图像数据,使用标定板图像来标定相机并求解相机内外参数。
1.2 IMU标定惯性测量单元(IMU)通常包括加速度计和陀螺仪等多种传感器。
IMU标定的目的是确定IMU的误差模型,以便在后续的定位中进行误差补偿。
在Matlab中,可以使用传感器标定和估计工具箱进行IMU标定操作。
首先,需要设计一套标定实验,包括旋转和加速度等多个运动过程。
然后,使用这些实验数据来标定IMU的误差模型。
二、定位算法与模型2.1 基于测距的定位基于测距的定位是通过测量到达定位节点的信号传播时间或信号强度等信息来实现的。
在Matlab中,可以使用距离测量数据进行多边定位或三边定位。
多边定位是通过测量到多个定位节点的距离信息来确定目标位置,可以使用最小二乘法等进行求解。
三边定位是通过测量到三个定位节点的距离信息来确定目标位置,可以使用三角测量法进行求解。
2.2 基于惯性导航的定位惯性导航是利用IMU等传感器测量物体的加速度和角速度等信息进行定位和导航的方法。
在Matlab中,可以使用十字光束法进行惯性导航定位。
首先,需要根据IMU数据求解出物体的位置、速度和姿态等信息。
然后,通过十字光束法计算出相对定位误差,从而实现精确定位。
2.3 基于地标的定位基于地标的定位是通过识别已知地标进行定位的方法。
摄像机标定的基本原理、实现及性能分析
37
1
摄像机标定的基本原理、实现及性能分析
摘要:在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置 与其在图像中对应点之间的相互关系,必须建立摄像机成像的几何模型, 并由此重建和识 别物体。这些几何模型参数就是摄像机参数。在大多数条件下这些参数必须通过实验与计 算才能得到,这个求解参数的过程就称之为摄像机标定。摄像机参数标定是光学非接触式 三维测量的首要步骤,其结果的精度及算法的稳定性直接影响摄像机工作产生结果的准确 性。本文首先分析了摄像机标定的基本原理,然后重点讨论了摄像机标定的几种方法以及 其实现的过程。摄像机标定的基本方法可以分为两个大类:传统的摄像机标定方法,如直 接线性变换方法(DLT 方法)、R. Tsai 的 RAC 方法、 张正友的平面标定方法、 孟晓桥、 胡占义的圆标定方法、吴毅红等的平行圆标定方法等,以及摄像机自标定方法,如基于 Kruppa 方程的自标定方法、分层逐步标定法、基于二次曲面的自标定方法等。还有一些 方法难以归类到这两类中,如主动视觉摄像机标定方法。本文在研究摄像机成像的几何模
3 传统摄像机标定方法................................ 12
3.1 直接线性变换(DLT变换) ...................................12 3.2 Tsai 的 RAC的定标算法 .....................................14 3.3 张正友的平面标定方法 ......................................17
opencv相机标定原理

opencv相机标定原理
相机标定是计算机视觉领域中重要的一步,它是指确定相机内部参数和外部参数的过程。
内部参数包括焦距、光心等,它们是相机本身固有的参数。
外部参数包括相对位置和方向,它们是相机和被摄物体之间的相对关系。
OpenCV提供了一种简化的相机标定方法,称为棋盘格标定法。
它通过观察相机拍摄的棋盘格图像,求出相机的内部参数和外部参数。
具体做法是先拍摄多张棋盘格图像,然后提取每张图像中棋盘格内角点的坐标,以此建立相机坐标系和图像坐标系之间的映射关系。
最后使用非线性最小二乘法优化得到最优的相机参数。
要实现棋盘格标定,首先需要定义一个棋盘格模板,它是一个二维网格,每个格子内都是黑色和白色交替的正方形。
拍摄时需要保证棋盘格与相机成一个角度,这样才能够在图像中正确识别出每个角点的坐标。
而在识别角点时,OpenCV中提供了一个cornerSubPix函数,它可以对提取的角点坐标进行亚像素级别的精确处理。
总之,相机标定是计算机视觉领域中重要的一个步骤。
OpenCV提供了基于棋盘格标定的简便方法,它能够快速准确地确定相机内部参数和外部参数,从而实现更为精确的视觉识别与定位。
matlab摄像机标定实验报告

摄像机标定实验报告一、实验任务使用工业摄像机拍摄9张标定图片,利用matlab中Camera Calibration Toolbox对摄像机进行标定。
二、实验原理针孔摄像机模型图1 摄像机针孔模型成像摄像机采集图像原理如图1。
物体上发出的光线投射到图像平面,仿佛所有的光线都经过针孔平面上的针孔点,垂直于针孔平面过针孔点的直线为光轴,从针孔到图像平面的距离就是焦距,在图中,摄像机焦距f,物体到摄像机的距离为Z,物体长S,物体在图像上的长度为s。
物体光线、光轴与物体之间组成相似三角形,得到这样的关系−s/f=S/Z。
图2 针孔模型图像平面一针孔点为中心旋转180°把图像平面以针孔点为中心旋转180°。
物体和图像在针孔平面的一边,仿佛所有光线从物体走到图像平面成像的对应点,最后汇集到一点,这个点定义为投影中心[33]。
图3-22中点O为投影中心。
在抽象的针孔模型中点P(X w,Y w,Z w)由通过投影中心O的光线投影到图像平面上,相应的图像点为p(x,y,f)。
成像芯片的中心通常不在光轴上,定义图像平面与光轴交点为主点o c坐标(c x,c y)。
f为透镜的物理焦距,定义f x为焦距长度与像素x轴方向长度的比,定义f y 为焦距长度与像素y轴方向长度的比。
可以得到x=f x(X wZ w)+c x(1)y=f y(Y wZ w)+c y(2)将坐标为(X,Y,Z)的物理点映射到投影平面上坐标为(x,y)的过程叫投影变换。
齐次坐标可以建立这种变换。
齐次坐标把维数为n投影空间的点表示成(n+1)维向量。
图像平面为二维投影空间,可用三维向量表示该平面上的点。
将摄像机参数f x、f y、c x、c y重新排列为一个3×3的矩阵,如M,该矩阵就是摄像机内部参数矩阵。
将物理世界中的点投射到摄像机上,用下式表示:p=MP,其中p=[x yw ],M=[f x0c x0f y c y001],P=[X wY wZ w](3)标定过程摄像机参数f x、f y、c x、c y、倾斜系数需要通过计算得到,这一过程为摄像机标定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011-01-30相机标定的原理与意义及O p e n C V、M a t l a b实现差异小结2011-01-30 相机标定的原理与意义及OpenCV、Matlab实现差异小结分类:OpenCV点滴2011-01-30 20:35 2292人阅读评论(3) 收藏举报本文是一篇关于相机标定意义和原理的个人总结,包含了OpenCV和Matlab中常用的相机标定函数的注解。
相机标定是机器视觉的基础,标定结果的好坏直接决定了机器视觉的系统精度,作用可见一斑。
在这一年半的时间里,我个人也是随着实验和程序的进一步理解,对标定的原理和意义有了更多的想法。
同样,由于博文的关系,仍有一些朋友会常常询问标定的程序问题。
本人的2010-05-17OpenCV标定程序的问题也多次被朋友询问,由于当时对标定的认识还不够系统,因此现在认为该文对标定的意义和原理有很多误解,并在此推荐一些较好的博文拱大家学习:双目测距与三维重建的OpenCV实现问题集锦(一)图像获取与单目标定;双目测距与三维重建的OpenCV实现问题集锦(二)双目标定与双目校正;双摄像头测距的OpenCV实现;分享一些OpenCV实现立体视觉的经验;下面结合本人的毕业论文及一年半来对机器视觉的学习,对相机标定的意义和原理进行叙述。
1.单目相机模型单目相机模型中的三种坐标系关系如图1所示,相机坐标系即是以光轴中心O为原点的坐标系,其z轴满足右手法则,成像原点所代表平面即为像平面坐标系(实际应用中,均以图像左上角为坐标系原点),实际物体坐标系即为世界坐标系。
图1 单目相机模型的三坐标系统关系其中,在世界坐标系的值为,是在像平面坐标系的投影点,其相机坐标系的值为。
是相机坐标系轴与像平面夹角,一般情况下轴与像平面垂直,值为。
且相机坐标系与像平面平行,为相机的焦距。
对于从相机坐标系到像平面坐标系的变换,像平面坐标系是用像素单位来表示的,而相机坐标系则是以毫米为单位来表示,因此,要完成改变换过程就需要先得到像平面的像素单位与毫米单位之间的线性关系。
在图1中,相机光轴中心z轴方向上与像平面的交点称为投影中心,坐标为,是像素单位,而每个像素在和的物理尺寸为和,单位是像素/毫米,则像平面的像素与毫米间的线性关系如式(1):(1)根据小孔模型下投影变换原理,像平面的物理坐标对应的相机坐标系满足式(2):(2)其对应的矩阵形式为式(3):(3)联立式(1)和式(3),得到式(4)即为相机坐标系与像平面坐标系变换的矩阵。
(4)其中,即为相机的6个内参数,其组成的矩阵即为内参数矩阵。
对于从相机坐标系到世界坐标系的变换,是通过旋转矩阵R和平移矩阵T完成的,如图2所示。
图2 相机坐标系与世界坐标系的变换关系其中,平移矩阵T是三维列向量,旋转矩阵R是坐标轴依次绕和轴旋转角度和所形成的三个矩阵的总乘积。
它们的定义如式(5):(5)则矩阵R的计算公式如式(6):(6)因此,从相机坐标系到世界坐标系的变换如式(7),其中,表示,为旋转矩阵,为平移矩阵,该变换矩阵称为外参数矩阵。
(7)最后,联立式(4)和式(7)求得像平面坐标系与世界坐标系之间的变换关系,如式(8):(8)其中,即为透视投影矩阵,表示空间中三维点坐标与图像平面二维坐标之间的线性关系,表示的像平面齐次坐标值,表示的世界坐标系齐次坐标值。
基于以上几何原理和相机模型得到的图像信息和三维信息之间的关系,存在不可逆性,即可以通过已知世界坐标系的坐标值求得二维坐标值,如果要进行二维坐标到三维坐标的反求还需要其他的数学模型辅助求解。
2.Matlab标定工具箱应用1) 制作标定板,标定板尺寸为324(mm)X252(mm),即7行9列63个36mm 的正方形方格组成,如图3所示。
图3 标定方格板2) 将水平平行的左右相机同时采集标定板的不同位姿图像,共计12组位姿(对于采集的图像,位姿越多,标定结果也会越精确,建议在10组到20组之间)如图4,5所示。
图4 左相机的标定图像图5 右相机的标定图像3) 在工具箱中通过Extract grid corners提取每幅标定图像的特征点(即黑方格与白方格的交点)。
4) 进行单目标定,得到左右相机的内外参数以及畸变系数,并将参数保存到Calib_Results_left和Calib_Results_right两个mat格式的文件中。
3.Matlab标定结果与OpenCV标定结果的比较与分析Matlab标定结果:通过上节的步骤(1)-(4),可以得到如图6和7所示的左右相机的内参数、畸变系数结果。
图6 左相机的内参数和畸变系数图7 右相机的内参数和畸变系数对于左右相机由于透镜畸变造成的误差使用工具箱中的visualize_distortions 功能进行分析,可以得到左相机的畸变图,如8、9、10所示,相应的右相机畸变图,如11、12、13所示。
图8 左相机镜头畸变图图9 左相机径向畸变图图10 左相机切向畸变图对于图8到10,图中的0点即为左相机光学中心,图中的箭头显示相机图像的畸变方向。
图8左相机整体畸变模型中,该相机的左侧畸变不明显,若物体的图像在此则不易受畸变因素影响造成线条的弯曲;图9左相机径向畸变模型中,该相机的畸变系数由中心向外增大,即物体的图像越靠近图像边缘,其线条的弯曲程度就越大;图10左相机切向畸变模型中,箭头方向显示该相机切向畸变的增大方向,在相机的左侧其切向畸变与径向畸变的方向相反,使得整体畸变模型中,相机左侧的畸变较小。
图11 右相机镜头畸变图图12 右相机径向畸变图图13 右相机切向畸变图对于图11到13,图中的0点与左相机相同,即为右相机光学中心,图中的箭头显示相机图像的畸变方向。
图11右相机整体畸变模型中,该相机的中间及偏左侧畸变不明显,若物体的图像在此则不易受畸变因素影响造成线条的弯曲;图12右相机径向畸变模型中,该相机的畸变系数由中心向外增大,但右相机比左相机在光轴中心附近有更大的区域畸变很小,因此位于右侧相机光学中心的图像,其线条因受畸变造成的弯曲很小;图13右相机切向畸变模型中,箭头方向显示该相机切向畸变的增大方向,在相机的左侧其切向畸变与径向畸变的方向相反,使得整体畸变模型中,位于右相机图像左侧的线条受畸变影响较小。
OpenCV标定结果:在此列举的OpenCV标定结果是我双目视觉标定且优化后的结果,与Matlab的会有差异。
左侧相机的内参数矩阵:(9)右侧相机的内参数矩阵:(10)该式(9)-(10)与式(1)相对应。
而Matlab中的cc对应于式(1)中的相机光轴中心在图像平面的投影坐标,fc即为式(1)中的和。
至此,讲解完了OpenCV与Matlab所对应的相机标定内参数矩阵的含义。
OpenCV与Matlab标定中的差异:OpenCV的标定参数中,对于镜头畸变采用的方法是Brown博士在71年发表的文章中提到的;而Matlab中的镜头畸变参数采用基于Heikkil博士提出的方法,将非线性干扰因素引入到内外参数的求解过程。
Heikkil采用的矩阵来表示以上的两种畸变系数。
根据Brown的非线性模型,和表示镜头的径向畸变系数,通常只使用两项,只是针对即便较大的镜头(例如鱼眼镜头,其余情况下该系数值为0),而和表示切向畸变系数,由式(11)和式(12)求解该矩阵,本文的畸变系数求解伴随在相机标定过程中。
(11)其中,是像平面上的任一点坐标值,是进行径向畸变矫正后的坐标值,是作为光学中心畸变为0的点进行泰勒级数展开后得到的。
(12)其中,是像平面上的任一点坐标值,是进行切向畸变矫正后的坐标值,如式(11)的定义相同。
4.外参数的作用及其在相机标定中的意义外参数定义了如图2所示的图像平面到世界坐标系的变换关系。
而标定就是通过相机寻找图像平面中如图3所示的标定板的特征点位置,所以得到的外参数是图像平面与标定板所处平面的线性变换关系。
在我的2010-06-14基于Matlab的双目视觉定位问题研究中,通过Matlab标定工具箱产生的图4与图5就可以表达上述含义。
因此,对于不同的棋盘格标定板空间位置,必然对应于不同的外参数矩阵。
同样的,在视觉伺服中,雅可比矩阵也有同样的数学意义。
对于视觉伺服,个人认为可以看些徐德的论文入门。
5.OpenCV标定程序说明用于寻找图像中的棋盘格标定板的特征点:CvSize board_sz = cvSize( board_w, board_h );IplImage* imgLeft=cvCreateImage(cvSize(imgL->width,imgL->height),imgL->depth,imgL->nChannels);IplImage* imgRight=cvCreateImage(cvSize(imgR->width,imgR->height),imgR->depth,imgR->nChannels);CvPoint2D32f* cornersLeft = new CvPoint2D32f[ board_n ];CvPoint2D32f* cornersRight = new CvPoint2D32f[ board_n ];int corner_countLeft, corner_countRight;cvResize(imgL,imgLeft,CV_INTER_LINEAR);cvResize(imgR,imgRight,CV_INTER_LINEAR);if(frame++ % board_dt == 0) {//Find chessboard corners:int foundLeft = cvFindChessboardCorners(imgLeft, board_sz, cornersLeft, &corner_countLeft,CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);int foundRight = cvFindChessboardCorners(imgRight, board_sz, cornersRight, &corner_countRight,CV_CALIB_CB_ADAPTIVE_THRESH |CV_CALIB_CB_FILTER_QUADS);//Get Subpixel accuracy on those cornerscvCvtColor(imgLeft, grayLeft, CV_BGR2GRAY);//if input is colorful then use thiscvCvtColor(imgRight, grayRight, CV_BGR2GRAY);cvFindCornerSubPix(grayLeft, cornersLeft, corner_countLeft,cvSize(11,11),cvSize(-1,-1),cvTermCriteria(CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));//寻找棋盘格标定板的特征点cvFindCornerSubPix(grayRight, cornersRight, corner_countRight,cvSize(11,11),cvSize(-1,-1),cvTermCriteria(CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 )); //寻找棋盘格标定板的特征点//画出找到的特征点cvDrawChessboardCorners(imgLeft, board_sz, cornersLeft,corner_countLeft, foundLeft);cvDrawChessboardCorners(imgRight, board_sz, cornersRight,corner_countRight, foundRight);if (corner_countLeft>=board_n && foundLeft &&corner_countRight>=board_n && foundRight){//保存特征点在图像坐标中的坐标值,用于Calibrate2和StereoCalibration 的调用step = success*board_n;for( int i=step, j=0; jCV_MAT_ELEM(*image_pointsLeft, float,i,0) = cornersLeft[j].x;CV_MAT_ELEM(*image_pointsLeft, float,i,1) = cornersLeft[j].y;CV_MAT_ELEM(*image_pointsRight, float,i,0) = cornersRight[j].x;CV_MAT_ELEM(*image_pointsRight, float,i,1) = cornersRight[j].y;CV_MAT_ELEM(*object_points,float,i,0) = (float)(j/board_w);CV_MAT_ELEM(*object_points,float,i,1) = (float)(j%board_w);CV_MAT_ELEM(*object_points,float,i,2) = 0.0f;}CV_MAT_ELEM(*point_counts, int,success,0) = board_n;}}随后调用cvCalibateCamera2和cvStereoCalibate函数进行相机的标定。