基于OpenCV的双目摄像机标定技术研究_王长元
《基于棋盘格和圆标定物的双目相机标定方法研究》范文

《基于棋盘格和圆标定物的双目相机标定方法研究》篇一一、引言在三维重建、机器视觉、立体测量等领域中,双目立体视觉技术具有重要地位。
而为了获得高精度的双目视觉系统,准确的相机标定是必不可少的步骤。
本文旨在研究基于棋盘格和圆标定物的双目相机标定方法,通过分析棋盘格和圆标定物的特点,结合双目相机的成像原理,提出一种高效、准确的标定方法。
二、相关技术背景2.1 棋盘格标定法棋盘格标定法是计算机视觉中常用的一种相机标定方法。
该方法通过拍摄包含棋盘格的图像,并检测棋盘格的角点位置来获得相机的内参和外参。
由于棋盘格具有明显的特征点,易于被检测和定位,因此该方法具有较高的精度和稳定性。
2.2 圆标定物法圆标定物法是一种基于圆特征的相机标定方法。
该方法通过拍摄包含圆标定物的图像,并检测出圆心位置来获得相机的参数。
与棋盘格相比,圆标定物具有更好的旋转不变性和尺度不变性,能够更好地适应不同的拍摄环境和角度。
三、基于棋盘格和圆标定物的双目相机标定方法3.1 棋盘格与圆标定物的结合本文将棋盘格和圆标定物相结合,提出一种新的双目相机标定方法。
该方法首先利用棋盘格标定法获取相机的初始参数,然后通过拍摄包含圆标定物的图像,利用圆心位置对相机参数进行进一步优化。
3.2 标定过程(1)准备阶段:制作棋盘格和圆标定物,并将其放置在双目相机的视野范围内。
(2)拍摄阶段:分别拍摄包含棋盘格和圆标定物的图像,并确保图像清晰、无畸变。
(3)角点与圆心检测:利用计算机视觉算法检测棋盘格的角点位置和圆标定物的圆心位置。
(4)参数估计:根据检测到的角点和圆心位置,利用相机成像原理和双目立体视觉技术,估计相机的内外参数。
(5)参数优化:利用非线性优化算法对相机参数进行优化,以提高标定的精度和稳定性。
四、实验与分析为了验证本文提出的基于棋盘格和圆标定物的双目相机标定方法的可行性和有效性,我们进行了大量的实验和分析。
实验结果表明,该方法能够有效地提高双目视觉系统的精度和稳定性,具有较高的实用价值。
《基于棋盘格和圆标定物的双目相机标定方法研究》

《基于棋盘格和圆标定物的双目相机标定方法研究》篇一一、引言随着计算机视觉技术的不断发展,双目相机系统在机器人导航、三维重建、物体识别等领域得到了广泛应用。
为了实现双目相机的精确标定,本文提出了一种基于棋盘格和圆标定物的双目相机标定方法。
该方法通过棋盘格和圆标定物,结合双目相机的成像原理,实现了对双目相机系统的精确标定,提高了三维重建的精度和可靠性。
二、双目相机成像原理双目相机系统通过模拟人眼的立体视觉原理,利用两个相机从不同角度获取同一场景的图像信息,从而实现对场景的三维重建。
为了实现精确的三维重建,需要对双目相机系统进行精确的标定。
三、棋盘格标定方法棋盘格标定方法是一种常用的双目相机标定方法。
该方法通过在棋盘格上放置已知尺寸的方格,利用双目相机从不同角度拍摄棋盘格图像,提取出棋盘格上的角点信息,从而实现对双目相机的标定。
该方法具有简单易行、操作方便等优点,但在标定过程中需要保证棋盘格的平移和旋转运动能够覆盖足够大的空间范围,否则可能导致标定结果的不准确。
四、圆标定物标定方法圆标定物标定方法是一种基于圆形的标定方法。
该方法通过在标定物上放置已知尺寸的圆形标记点,利用双目相机从不同角度拍摄标定物图像,提取出圆形标记点的中心位置信息,从而实现对双目相机的标定。
该方法具有更高的灵活性,可以在任意形状的平面上进行标定,并且可以通过增加标记点的数量和改变其在空间中的分布来提高标定的精度和可靠性。
五、基于棋盘格和圆标定物的双目相机标定方法本文提出的基于棋盘格和圆标定物的双目相机标定方法,结合了棋盘格和圆标定物的优点。
首先,利用棋盘格进行初步的标定,获取双目相机的初始参数。
然后,利用圆标定物进行进一步的精标定,通过增加标记点的数量和改变其在空间中的分布来提高标定的精度和可靠性。
在标定过程中,我们采用了一种迭代优化的算法,通过对不同角度下提取的角点和圆形标记点的中心位置信息进行迭代优化,实现对双目相机参数的精确估计。
基于OpenCV的双目立体视觉测距_摄像机标定
基于OpenCV的双目立体视觉测距_摄像机标定论文导读::双目立体视觉模型。
摄像机标定。
立体匹配采用OpenCV库中的块匹配立体算法。
目前的测距方法主要有主动测距和被动测距两种方法。
论文关键词:双目立体视觉,摄像机标定,立体匹配,测距(一)引言基于计算机视觉理论的视觉测距技术是今后发展的一个重要方向,它在机器人壁障系统、汽车导航防撞系统等领域有着广泛的应用前景。
目前的测距方法主要有主动测距和被动测距两种方法。
论文采用的是被动测距法。
被动测距法是在自然光照条件下,根据被测物体本身发出的信号(如光信号)来测量距离,主要包括立体视觉测距法、单目测距法、测角被动测距法等[1]。
立体视觉测距法是仿照人类利用双目感知距离信息的一种测距方法,直接模拟人的双眼处理景物,简便可靠,但该方法的难点是选择合理的匹配特征和匹配准则[2]。
双目立体视觉系统采用两台摄像机同时从两个不同视点获取同一景物的多幅图像,即立体图像对,通过测量景物在立体图像对中的视差,再利用双目视觉成像原理就可以计算出目标到摄像机的距离。
立体匹配采用OpenCV库中的块匹配立体算法,在得到摄像机参数和匹配点后再利用最小二乘法即可算出三维信息。
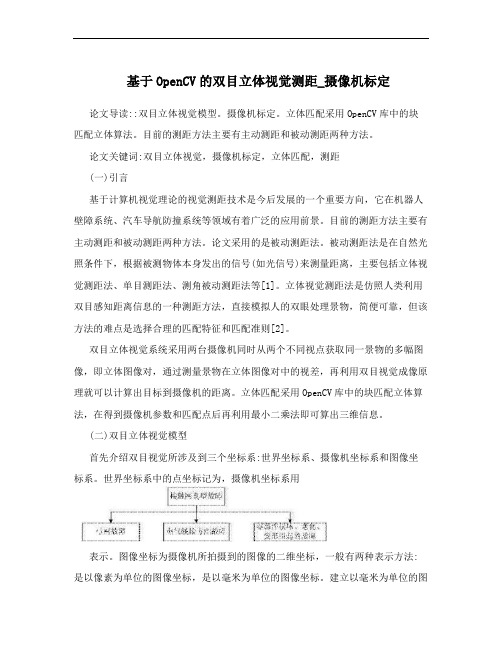
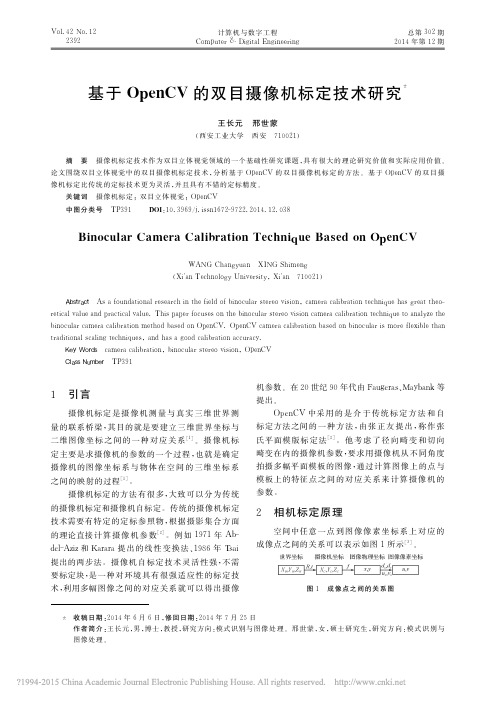
(二)双目立体视觉模型首先介绍双目视觉所涉及到三个坐标系:世界坐标系、摄像机坐标系和图像坐标系。
世界坐标系中的点坐标记为,摄像机坐标系用表示。
图像坐标为摄像机所拍摄到的图像的二维坐标,一般有两种表示方法:是以像素为单位的图像坐标,是以毫米为单位的图像坐标。
建立以毫米为单位的图像坐标是因为坐标只表示了像素在数字图像中的行数和列数,并没有表示出该像素在数字图像中的物理位置[3]论文范文。
图1为平行双目视觉模型,即参数相同的两个摄像机平行放置,两光轴互相平行且都平行于z 轴,x 轴共线摄像机标定,两摄像机光心的距离为B(即基线距)。
图中O1、O2为左右两摄像机的焦点,I1 、I2为左右摄像机的像平面,P1 、P2 分别是空间点P(X,Y,Z)在左右像平面上的成像点,f是摄像机的焦距。
《基于棋盘格和圆标定物的双目相机标定方法研究》

《基于棋盘格和圆标定物的双目相机标定方法研究》篇一一、引言随着计算机视觉技术的不断发展,双目相机系统在机器人导航、三维重建、物体识别等领域得到了广泛应用。
为了实现双目相机的精确标定,本文提出了一种基于棋盘格和圆标定物的双目相机标定方法。
该方法通过棋盘格和圆标定物对双目相机进行联合标定,提高了标定的精度和鲁棒性。
二、相关技术概述2.1 双目相机标定原理双目相机标定是通过建立相机之间的几何关系,从而实现对三维空间中物体的精确测量。
通常使用一系列已知尺寸和形状的物体(如棋盘格)作为参考物进行标定。
2.2 棋盘格和圆标定物特点棋盘格作为一种常用的标定工具,具有结构简单、易于制作和识别等特点。
而圆标定物则具有较高的几何特征,能够提供更多的信息用于相机标定。
三、基于棋盘格和圆标定物的双目相机标定方法3.1 棋盘格的标定步骤首先,在双目相机系统中放置棋盘格,并确保棋盘格在相机的视野范围内。
然后,通过相机拍摄棋盘格图像,提取出棋盘格的角点信息。
最后,根据角点信息计算相机的内外参数,完成棋盘格的标定。
3.2 圆标定物的标定步骤将圆标定物放置在双目相机系统中,并拍摄圆标定物的图像。
然后,利用图像处理技术提取出圆心坐标信息。
根据圆心坐标信息和已知的圆半径,可以计算出相机的透视变换矩阵,进而实现相机的精确标定。
3.3 联合标定过程在完成棋盘格和圆标定物的单独标定后,将两者的结果进行融合,以实现双目相机的联合标定。
通过比较和分析棋盘格和圆标定物在双目相机系统中的位置关系,可以进一步优化相机的内外参数,提高标定的精度和鲁棒性。
四、实验与分析为了验证本文提出的基于棋盘格和圆标定物的双目相机标定方法的可行性和有效性,我们进行了实验分析。
实验结果表明,该方法能够有效地提高双目相机的标定精度和鲁棒性,为后续的三维重建、物体识别等任务提供了可靠的相机参数。
五、结论本文提出了一种基于棋盘格和圆标定物的双目相机标定方法。
该方法通过联合使用棋盘格和圆标定物进行双目相机的精确标定,提高了标定的精度和鲁棒性。
《2024年基于棋盘格和圆标定物的双目相机标定方法研究》范文

《基于棋盘格和圆标定物的双目相机标定方法研究》篇一一、引言在三维重建、机器视觉、立体测量等应用中,双目相机技术被广泛应用。
其标定技术则是影响其测量精度与可靠性的关键因素之一。
目前,针对双目相机的标定方法主要分为传统标定方法和自标定方法。
其中,传统标定方法因其标定精度高、稳定性好而受到广泛关注。
本文提出了一种基于棋盘格和圆标定物的双目相机标定方法,通过优化算法提高标定精度和效率。
二、相关工作传统的双目相机标定方法通常使用高精度的三维标定物,如棋盘格等。
然而,这些方法在复杂环境下存在一定局限性,如标定物制作难度大、对光照条件敏感等。
近年来,一些研究者开始尝试使用圆标定物进行双目相机标定,这种方法具有制作简单、对光照条件不敏感等优点。
但如何将这两种标定方法有效地结合起来,提高标定精度和效率,仍是一个待解决的问题。
三、方法本文提出的基于棋盘格和圆标定物的双目相机标定方法,主要包括以下步骤:1. 制作棋盘格和圆标定物:棋盘格用于初步标定双目相机的内外参数,圆标定物则用于进一步提高标定精度。
2. 棋盘格初步标定:将棋盘格放置在双目相机的视野中,通过图像处理技术提取棋盘格的角点信息,计算出双目相机的初步内外参数。
3. 圆标定物进一步优化:将圆标定物放置在已知的空间位置,通过双目视觉系统检测圆心位置。
利用最小二乘法等方法对双目相机的内外参数进行优化,提高标定精度。
4. 优化算法设计:采用迭代算法和最小二乘法相结合的方法,对双目相机的内外参数进行迭代优化,提高标定效率。
四、实验与分析为了验证本文提出的基于棋盘格和圆标定物的双目相机标定方法的可行性和有效性,我们进行了多组实验。
实验结果表明,该方法能够有效地提高双目相机的标定精度和效率。
与传统的标定方法相比,该方法具有更高的鲁棒性和实用性。
五、结论本文提出了一种基于棋盘格和圆标定物的双目相机标定方法,通过优化算法提高了标定精度和效率。
实验结果表明,该方法具有较高的鲁棒性和实用性。
opencv里双目系统标定方法

opencv里双目系统标定方法
双目视觉标定,真的有那么重要吗?
说实话,标定双目系统就像是给相机配上一副“眼镜”。
只有
眼镜配得准,看得才清楚。
所以,标定双目视觉系统,就是为了让
它更准确地“看”世界。
标定是个啥样的过程?
标定啊,简单来说,就是通过一系列操作,给相机找出它的
“眼睛”参数。
比如,它看东西的焦距、畸变,还有它跟世界之间
的位置关系。
听说张氏标定法挺火的?
对啊,张氏标定法就像是个“网红”方法。
它用个棋盘格模板,拍拍照片,就能算出相机的参数。
简单、快速,而且效果还不错。
Tsai两步法是不是也很厉害?
Tsai两步法啊,听起来就像是那种“老江湖”的方法。
它分两
步来,先大概算算,再精细调整。
虽然现在已经有些新方法比它更火,但在相机标定的历史上,它可是个里程碑。
标定要注意哪些事儿?
标定啊,可得小心点儿。
照片得拍清楚,数量也得够。
相机别动,不然结果就歪了。
最后,还得验证一下参数准不准,别白忙一场。
标定完了能干啥?
标定完了,相机就“开光”了,能更准确地看世界。
立体匹配、三维重建,啥都能干。
就像给你配了副好眼镜,看什么都清晰多了。
所以啊,标定双目视觉系统,真的挺重要的。
得好好对待,别
马虎了事儿。
基于OpenCV和本质矩阵的双目立体视觉摄像机标定方法
基于OpenCV和本质矩阵的双目立体视觉摄像机标定方法蓝福明;杨宜民【期刊名称】《自动化与信息工程》【年(卷),期】2012(33)6【摘要】为克服传统标定过程复杂、不适用于现场操作等弱点,采用基于OpenCV 和本质矩阵的双目视觉摄像机标定方法。
该方法利用OpenCV编程在线标定摄像机的内部参数,通过图像对应特征点匹配,结合极线约束方程,线性求解出本质矩阵,从而快速地得到摄像机的外部参数。
实验结果表明,该标定算法简单快速,可适用于户外场合的标定。
% Most traditional approaches for stereo sensors calibration often require accurate calibration objects and complex procedures, which limit their capability in out-door work. The paper of binocular vision camera calibration method works on OpenCV and essential matrix. The method uses the program of OpenCV to calibrate the parameters of camera's internal on line. Equation of the essential matrix is formed by finding matched points in the image-pair, combined with the epipolar constraint and solved linearly. The internal parameters of the camera are rapidly got. The experimental results show that the calibration algorithm is simple and fast, and can apply to calibrate the occasion of out-door.【总页数】4页(P4-7)【作者】蓝福明;杨宜民【作者单位】广东工业大学自动化学院;广东工业大学自动化学院【正文语种】中文【相关文献】1.基于OpenCV的双目摄像机标定 [J], 袁利;刘海华;陆雪松2.基于 OpenCV 的双目摄像机标定技术研究 [J], 王长元;邢世蒙3.基于MATLAB与OpenCV相结合的双目立体视觉测距系统 [J], 汪珍珍;赵连玉;刘振忠4.基于OpenCV的双目立体视觉测距 [J], 罗丹;廖志贤5.基于OpenCV的双目立体视觉监控跟踪系统 [J], 万智萍;叶仕通因版权原因,仅展示原文概要,查看原文内容请购买。
基于OpenCV改进的摄像机标定法
K e y Wo r d s c a me r a mo d e l ,l e n s d i s t o r t i o n,Op e n CV,c a me r a c a l i b r a t i o n Cl a s s Nu mb e r TP3 9 】
W ANG Ch a n g y u a n HOU J i n g
( Xi ’ a n Te c h n o l o g i c a 1 Un i v e r s i t y.Xi ’ a n 7 1 0 0 2 1 )
Ab s t r a c t Fo r t h e f i e l d o f c o mp u t e r v i s i o n c a me r a c a l i b r a t i o n ,t a k i n g i n t o a c c o u n t d i s t o r t i o n o n c a l i b r a t i o n a c c u r a c y,t h e o p e n c o mp u t e r v i s i o n l i b r a r y Op e n C V a n d c a me r a mo d e l a r e i n t r o d u c e d,c a me r a c a l i b r a t i o n a l g o r i t h m b a s e d o n t h e Op e n CV i s g i v e n . Th e a l g o r i t h m ma k e s f u l l u s e o f t h e Op e n C V l i b r a r y f u n c t i o n,wi t h h i g h c a l i b r a t i o n a c c u r a c y a n d c o mp u t a t i o n a l e f f i — c i e n c y ,a n d c a n me e t t h e n e e d s o f s t e r e o v i s i o n s y s t e m.
基于opencv的双目视觉影像测量标定方法优化设计
基于opencv的双目视觉影像测量标定方法优化设计作者:吴世迪石成江何万涛来源:《科技创新与应用》2017年第10期摘要:逆向工程技术采用了通过测量实际物体的尺寸转换为3D模型的方法。
文章着眼于长距离广角度下相对低精度的视觉影像测量标定,对此进行了优化设计。
通过CCD摄像机获得平面图像后使用opencv滤波处理,精确识别测量物外观轮廓和激光点,综合激光角度和光斑到像平面的距离求解相机在世界坐标系下的参数矩阵。
关键词:结构光测量;相机标定;opencv滤波;轮廓提取1 绪论结构光测量原理及相机标定简介光栅投影仪CCD相机安装位置如图1所示。
从光栅投影仪发出的光栅投射到零坐标平面上经过物体表面轮廓阻挡产生包含高度信息的相位偏移信息的反射光,由CCD相机获取分时多帧图像识别分析后得到像点实际高度。
作为描述被测物体空间位置的绝对坐标系被称为世界坐标系,用来描述摄像机像素平面成像的2D位置关系的平面坐标系称为摄像机坐标系。
摄像机坐标系与世界坐标系的相对位置关系可以用一个旋转矩阵和一个平移向量来描述。
由于测量对象为较大尺寸和较大视角的情况,所以忽略透镜的径向轴向畸变可以得到透视变换矩阵A。
其中[XW YW ZW 1]T为世界坐标系下的三维坐标,[u v 1]T为对应的像平面坐标aij为透视变换矩阵A的元素,化简后得到一个线性方程组。
对于每个世界坐标系下已知其对应关系的图像点,由上述方程组可知,在不少于六个对应坐标点带入后可求解矩阵A。
较多的对应点带入后可以得到更多更多的线性约束关系方程组,用最小二乘法求解矩阵A取值更精确,从而降低误差影响。
基于以上取点需求,引入一种激光测距配合角度旋转的方式完成相机标定。
2 光斑图像采集(1)图2中坐标原点位光源位置,由卡尺和激光测距度数配合安装调试为零位置。
固定在可以水平旋转和竖直垂直于纸面方向旋转的两个旋转台上。
当两个转台安不同角度旋转定位时,就可以分别取到图示网格状交点的各个位置。
一种基于无共视区域的多双目相机运动标定方法

一种基于无共视区域的多双目相机运动标定方法
双目相机是一种用于三维测量和计算机视觉应用的重要设备,其中相机间的外部标定
是实现立体视觉的关键技术。
现有的双目相机标定方法主要依赖于共视区域内的特征点匹配,但在某些情况下,由于图像遮挡或视线受阻等原因,相机间的共视区域受限,这种方
法就变得困难。
针对这一问题,本文提出了一种基于无共视区域的多双目相机运动标定方法。
该方法
利用了多个相机的重叠区域以及相机运动的连续性,通过多个相机对目标场景进行观测,
对相机外部参数进行标定,并构建了一个多相机标定系统。
具体地,该方法的实现步骤如下:
1. 选取多个双目相机,并放置在目标场景不同的视点位置上。
2. 在每个相机的视场范围内,采集一系列的图像。
3. 利用模板匹配等方法,确定不同相机视场中相同目标物的位置。
4. 利用相邻图像间的运动信息,确定相机间的外部参数。
5. 借助于多个相机的重叠区域,检查标定结果的稳定性和可靠性。
6. 最终得到多个相机的外部参数,以及标定系统的相对姿态信息。
该方法的主要特点在于它能够处理相机间无共视区域的场景,并具有以下优点:
1. 可以利用多个相机的信息,提高标定的精度和稳定性。
2. 不需要用户手动选取标志物,同时适用范围更广。
3. 实验结果表明,该方法的标定误差相对于传统方法缩小了一半以上。
这种基于无共视区域的多双目相机运动标定方法具有很强的实用性和广泛的应用前景,可为各种三维测量和计算机视觉领域的应用提供有力的技术支持。
《2024年基于棋盘格和圆标定物的双目相机标定方法研究》范文

《基于棋盘格和圆标定物的双目相机标定方法研究》篇一一、引言随着计算机视觉技术的不断发展,双目相机系统在机器人导航、三维重建、物体识别等领域得到了广泛应用。
为了实现双目相机的精确标定,本文提出了一种基于棋盘格和圆标定物的双目相机标定方法。
该方法利用棋盘格的矩形特征和圆标定物的圆形特征进行双目相机的内外参数标定,从而提高标定的准确性和鲁棒性。
二、双目相机系统及标定原理概述双目相机系统是通过两个相机的视差来实现深度感知的,因此,两个相机的精确标定对于三维重建的准确性至关重要。
标定过程主要是通过已知的标定物(如棋盘格或圆标定物)来获取相机的内外参数。
内外参数包括相机的焦距、主点坐标、畸变系数等内参,以及两个相机之间的相对位置和旋转关系等外参。
这些参数的准确获取对于双目相机的立体匹配和三维重建具有重要意义。
三、基于棋盘格的标定方法基于棋盘格的标定方法是一种常用的相机标定方法。
该方法通过在棋盘格上布置已知大小和间隔的方格,利用相机拍摄棋盘格图像,然后通过图像处理技术提取棋盘格的角点信息,进而计算相机的内外参数。
在双目相机系统中,我们可以在同一棋盘格上进行双目相机的拍摄,分别提取左右相机拍摄的棋盘格角点信息,然后通过算法计算两个相机之间的相对位置和旋转关系,实现双目相机的标定。
四、基于圆标定物的标定方法除了棋盘格外,我们还可以使用圆标定物进行双目相机的标定。
圆标定物具有圆形特征,能够提供更多的信息用于相机的标定。
我们可以在圆标定物上布置一定数量和分布的圆形标记,然后利用相机拍摄圆标定物的图像,通过图像处理技术提取圆形标记的中心位置信息。
与基于棋盘格的标定方法类似,我们可以分别提取左右相机拍摄的圆标记中心位置信息,然后通过算法计算两个相机之间的相对位置和旋转关系,实现双目相机的标定。
五、基于棋盘格和圆标定物的双目相机标定方法本文提出的基于棋盘格和圆标定物的双目相机标定方法,是结合了上述两种方法的优点。
我们首先使用棋盘格进行粗略的标定,获取相机的初步内外参数。
基于OpenCV的双目摄像机标定技术研究_王长元
一般我们考虑前四个畸变参数 。 k p 2, 3, 即 O e n C V 提供了一个直接 使 用 的 矫 正 算 法 , p ) 输入 原 始 图 像 和 由 函 数 c 得 v C a l i b r a t e C a m e r a 2( 到的畸变系数 。
( )
( ) 1
4 双目摄像机标定原理
2 2 ) ] x x+ [ 2 r +2 x p y+p c o r r e c t e d= 1 2( 2 2 ( ) r +2 +2 x] 3 y y+ [ p y) p c o r r e c t e d= 1( 2 因此 , 共 有 五 个 需 要 的 畸 变 参 数: k k p 1, 2, 1,
V o l . 4 2N o . 1 2 2 3 9 2
计算机与数字工程 C o m u t e r &D i i t a l E n i n e e r i n p g g g
总第 3 0 2期 2 0 1 4 年第 1 2期
基于 O e n C V 的双目摄像机标定技术研究 p
王长元 邢世蒙
标定实现过程本设计是在windows2007平台下在vc环境下配置opencv1使用的求解焦距和偏移的算法是基于张有正的方法求解畸变参数的方法是基于brownopencv所使用的标定物是用不同黑白方块构成的平面格子通常称为棋盘原理上任何合适的表征物体都可以作为标定物由于三维标定物难以制作故opencv使用的不是基于3d构造物体的场景而是使用平面物体的多个场景opencv有内建的把棋盘当作定标设备的方法参见cvfindchessboardcorners双目摄像机标定的流程如图4所示
图 1 成像点之间的关系图
*
收稿日期 : 修回日期 : 2 0 1 4年6月6日, 2 0 1 4年7月2 5日 作者简介 : 王长元 , 男, 博士 , 教授 , 研究方向 : 模式识别与 图 像 处 理 。 邢 世 蒙 , 女, 硕士研究生, 研究方 向: 模式识别与 图像处理 。
一种基于OpenCV的摄像机标定方法
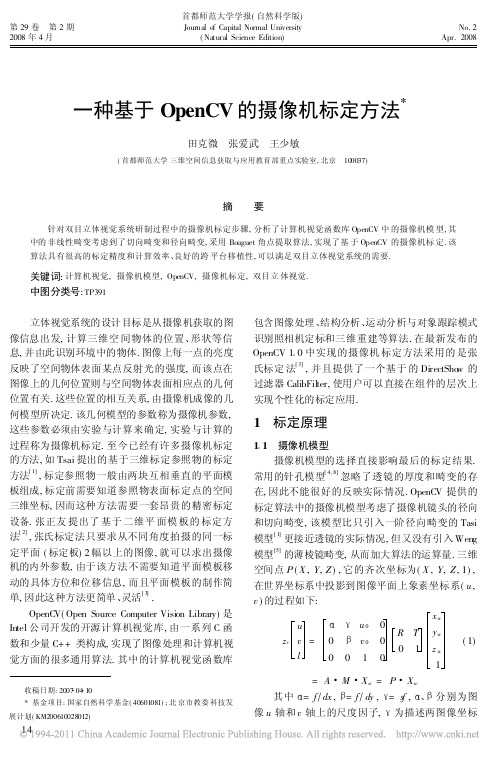
一种基于OpenCV 的摄像机标定方法*田克微 张爱武 王少敏(首都师范大学三维空间信息获取与应用教育部重点实验室,北京 100037)摘要针对双目立体视觉系统研制过程中的摄像机标定步骤,分析了计算机视觉函数库OpenCV 中的摄像机模型,其中的非线性畸变考虑到了切向畸变和径向畸变,采用Bouguet 角点提取算法,实现了基于OpenCV 的摄像机标定.该算法具有很高的标定精度和计算效率、良好的跨平台移植性,可以满足双目立体视觉系统的需要.关键词:计算机视觉,摄像机模型,OpenCV,摄像机标定,双目立体视觉.中图分类号:TP391收稿日期:2007 04 10*基金项目:国家自然科学基金(40601081);北京市教委科技发展计划(KM200610028012)立体视觉系统的设计目标是从摄像机获取的图像信息出发,计算三维空间物体的位置、形状等信息,并由此识别环境中的物体.图像上每一点的亮度反映了空间物体表面某点反射光的强度,而该点在图像上的几何位置则与空间物体表面相应点的几何位置有关.这些位置的相互关系,由摄像机成像的几何模型所决定.该几何模型的参数称为摄像机参数,这些参数必须由实验与计算来确定,实验与计算的过程称为摄像机标定.至今已经有许多摄像机标定的方法,如Tsai 提出的基于三维标定参照物的标定方法[1],标定参照物一般由两块互相垂直的平面模板组成,标定前需要知道参照物表面标定点的空间三维坐标,因而这种方法需要一套昂贵的精密标定设备.张正友提出了基于二维平面模板的标定方法[2],张氏标定法只要求从不同角度拍摄的同一标定平面(标定板)2幅以上的图像,就可以求出摄像机的内外参数,由于该方法不需要知道平面模板移动的具体方位和位移信息,而且平面模板的制作简单,因此这种方法更简单、灵活[3].OpenC V(Open Source Computer Vision Library)是Intel 公司开发的开源计算机视觉库,由一系列C 函数和少量C++类构成,实现了图像处理和计算机视觉方面的很多通用算法.其中的计算机视觉函数库包含图像处理、结构分析、运动分析与对象跟踪模式识别照相机定标和三维重建等算法.在最新发布的OpenCV 1 0中实现的摄像机标定方法采用的是张氏标定法[3],并且提供了一个基于的DirectSho w 的过滤器CalibFilter,使用户可以直接在组件的层次上实现个性化的标定应用.1 标定原理1 1 摄像机模型摄像机模型的选择直接影响最后的标定结果.常用的针孔模型[4,8]忽略了透镜的厚度和畸变的存在,因此不能很好的反映实际情况.OpenC V 提供的标定算法中的摄像机模型考虑了摄像机镜头的径向和切向畸变,该模型比只引入一阶径向畸变的Tasi 模型[1]更接近透镜的实际情况,但又没有引入Weng 模型[5]的薄棱镜畸变,从而加大算法的运算量.三维空间点P (X ,Y ,Z ),它的齐次坐标为(X ,Y ,Z ,1),在世界坐标系中投影到图像平面上象素坐标系(u ,v )的过程如下:z cu v l= u 000 v 0001R T1x wy w z w 1(1)=A M X w =P X w其中 =f dx , =f dy , =s f , 、 分别为图像u 轴和v 轴上的尺度因子, 为描述两图像坐标第29卷 第2期2008年4月首都师范大学学报(自然科学版)Journal of Capital Normal University(Natural Science Edition)No.2Apr.2008轴倾斜程度的参数,称为倾斜因子,(u 0,v 0)为摄像机主点.R 为摄像机坐标系相对于世界坐标系的3 3的旋转矩阵,T 为摄像机坐标系相对于世界坐标系的3 1平移矩阵.由于实际成像系统中存在着各种误差因素,如透镜和成像平面与透镜光轴并不垂直等,因此,像点、光心和物点在同一条直线上的假设并不成立.实际中的成像模型并不满足线性关系,而是一种非线性关系,需要引入透镜畸变如下:x =x d +!x (x ,y )y =y d +!y (x ,y )(2)其中,!x 和!y 表示非线性畸变值的X 、Y 轴分量.OpenC V 中的非线性畸变采用下述公式描述:!x (x ,y )=k 1x (x 2+y 2)+(p 1(3x 2+y 2)+2p 2xy )!y (x ,y )=k 2y (x 2+y 2)+(p 2(3x 2+y 2)+2p 2xy )(3)其中,!x 或!y 的第一项k 1、k 2称为径向畸变,第二项p 1、p 2称为切向畸变,确定畸变系数是摄像机标定的重要步骤之一.1 2 标定方法张氏标定法要求一个精确定位点阵的平面模板,如图1所示.然后通过自由移动摄像机或标定模板,使得摄像机至少在2个不同的位置(相对标定模板)拍摄模板图像,通过模板上的点和其图像的单应性(Homograph)来确定摄像机的内参,可以进一步解出摄像机的外参.然后再以这些参数为初始值,在考虑畸变的同时应用Levenberg Marquardt 算法对图像点与再投影点间的距离之和进行非线性最小优化,以得到一组精度更高的值.图1 平面标定模板和成功提取2 标定系统实现由于OpenC V 提供的cvCalibrateCamera2()只适用于n n 的图像,因此设计的标定模板为图1的88棋盘格图像,并打印出来.使用Matrox I ma ging Library 接口编程实现对摄像机的实时控制,并且由于对I O 设备的调用需求远多于对C PU 的占用,因此使用多线程技术控制摄像机的采集,采用多线程后,两路视频数据的采集分别进行,同时我们在内存中开辟了两块缓存来存放视频数据,有效地避免了内存的竞争,同时也保证了两个摄像头采集数据的同步性.同步采集界面如图2所示:图2 同步采集先将评估用的棋盘格图像读入计算机,再采用Jean Yves Bouguet 提出的角点提取算法[6],对每个格点分别利用高精度角点探测器进行精确定位.文中提取到的格点像素坐标可达到亚像素精度.拍摄过程中要求保持一定的光照,这样cvFindChessboard Corners()才能有效的提取到棋盘内侧的角点.成功提取到49个角点如图1所示.3 实 验实验使用两台B ASLER A102kc CCD 相机,焦距为14mm 的镜头和两个METE OR2 CL 32图像采集卡.所采集图像的分辨率为1392 1040像素.标定模板采用Bouguet 方法的模板(如图1所示),模板离摄像机的距离约为500mm 左右.实验分两步进行:第一步是标定摄像机,首先将双摄像机置于两个不同的位置拍摄3对处于不同方位的平面模板的图像(如图3所示),然后根据这3对图像对摄像机进行标定:图3 用于标定摄像机的3对图像第2期田克微等:一种基于OpenCV 的摄像机标定方法第二步是检验标定结果,利用上面标定好的摄像机对第一幅平面模板图像进行重建,根据立体视觉中的三角测量原理重建模板中49个角点的空间位置,重投影回二维平面,平均重投影误差如表1所示,可以看出采用OpenCV 实现的标定和张正友的标定例程具有相当的精度.恢复7 7共49个匹配点所对应的空间的三维坐标,实验结果是一组离散的空间点.图4和图5分别给出在OpenGL 下显示的点云图以及纹理映射,可以看出,根据标定结果重建出的离散点视觉效果良好,基本可以反映原物体的原貌.表1 平均重投影误差重投影误差左摄像机右摄像机重建后X 轴0 206130 323320 33597Y 轴0 225210 3546844193图4重建后的空间离散点图5 纹理映射结果4 结 论OpenC V 采用张氏标定法和Jean Yves B ouguet 角点提取算法,在些基础上开发的摄像机标定程序标定结果精确,而且其中的函数在设计和汇编时被Intel 公司对其所生产的处理器做了优化,因而具有很高的性能,并可以移植到Linux 平台.本文的结果表明OpenC V 开发的标定程序可以有效的应用在双目立体视觉系统的标定中.参考文献[1] Tsai R Y.A versatile camera calibration technique for high accuracy 3D machine vision metrology using off the shelf TV camerasand lenses[J].IEEE Journal of Robotics and Automation,1987,3(4):323-344.[2] Zhngyou Zhang.A flexible new technique for camera calibration[J].Technical Report MSR TR 98 71,Microsoft Research,December 1998.[3] Zhang Z.A flexible new technique for camera calibration[J].IEEE transactions on pattern analysis and machine intelligence,200,22(11):1330-1334.[4] 马颂德,张正友.计算机视觉-计算理论与算法基础[M].北京:科学出版社,2003[5] Weng J Y,Cohen P,Herniou M.Camera Calibration with distorti on models and accuracy evaluation[J].IEEE Trans on PAMI,1992,14(10):965-98[6] Jean Yves Bouguet.Camera calibration toolbox for Matlab[DB OL].2004.http: www.vision.cal Bouguetj calib !doc.[7] Zhengyou Zhang.A flexible new technique for camera calibration[EB OL].2007.http: %7Ezhangcalib #Application.首都师范大学学报(自然科学版)2008年第2期田克微等:一种基于OpenCV的摄像机标定方法A Camera Calibration Method Based on OpenCVTian Ke wei Zhang Ai w u Wang Shaomin(M i nistry of Educati on Key Laboratory of3D Information Acquisi ti on and Application,Capital Normal Universi ty,Beiji ng 100037,China)AbstractConsidering the calibration process steps for binocular stereo vision system,the camera model in OpenC V(open source computer vision library)was discussed,the non linear distortion of the tangential and radial distortion aberration is considered,the Bouguet corner e xtraction algorithm was used,and an arithmetic of camera calibration based on OpenCV was given.The algorithm has a very high standard of accuracy and computational efficiency,a good cross platform portability,is able to meet the needs of binocular stereo vision system.Key words:Computer vision,camera model,OpenC V,camera calibration,double CCD stereo vision(上接第10页)参考文献[1] 武康平.高级玫观经济学[M].北京:清华大学出版社,2001:103-114,103-114,55-56.[2] Markowi tz H M.资产选择!投资的有效分散化[M](1991).刘军霞,一弛译.北京:首都经济贸易大学出版社,2000:267-284.[3] Chi fu Huan g,Li t zenberger R H.金融经济学[M](1998).宋逢明译.北京:清华大学出版社,2003:1-10.[4] Fi shburn P C.Utili ty theory for deci sion making[M].New York:Wiley,1970.[5] Debreu G.Theory of value[M].New York:Wiley,1959:50-73[6] Hildenbrand W,Sonnenschein H.Introduction to Volu me VI,in:Hildenbrand W,Sonnenschein H,Handbook of Maths Eco.,Vol VI[C].Elsevier Science Publshers B.V.,1991:15-19.[7] Barten A P,Volker B hm.Consumer theory[C].Ch9,in:Arrow K,Intriligator M D,Handbook of Maths Eco.,Vol II.Elsevier Science Publshers B.V.,1984.[8] Karni E,Schmeidler D.Utility theory with uncertainty[C].i n:Hildenbrand W,Sonnenschein H,Handbook of Maths Ec.,Vo.VI[C].Elsevier Science Publshers B.V.,1991:1763-1771[9] 毛二万.金融经济学[M].沈阳:辽宁教育出版社,2002:4-12.The Other Proof of Existence Theorem of Expected Utility FunctionLiu Zongqian1 Fu Weiqiang1 Feng Sufen1,2(1. 2.School of Mathematical Science,Capital Normal Uni versity,Beini ng 100037,China;2.Beijing Polytechnic College,Beijing 100042,China)AbstractThis paper introduces the set of selection under risk and the e xpected utility properties through lottery that is based on WuSang ping(2001),and gives the concept of expected utility ing expected utility func tion and preference relation,and expec ted utility axioms which is different to Markowits(1991,2000)or Chi fu Huang and Litzenberger(1998,2003),it proves some natures.Its main result is that obtains the other proof of sufficient and necessary condition,uniqueness of existence theorem of expected utility functions by probability distribution being one to one to distribution function,and using the set of selection under risk being taken a bounded,closed and convex subset in Euclidean space R m,and it has applied the above properties.Key words:risk choice,e xpectation utility,preference.。
基于OpenCV的双目摄像头标定研究及实现

通 常 ,任 何 维 的 旋 转 可 以 表 述 为 坐 标 向 量 与 合 适 尺 寸 的 方
阵 的 乘 积 。在 三 维 空 间 中 ,我 们 可 以 把 旋 转 分 解 为 绕 各 自 坐 标
轴 的 二 维 旋 转 。由 此 可 得 ,摄 像 机 坐 标 系 、世界坐标 系之间 的转
换关系为:
行 建 立 摄 像 机 坐 标 系 ,如 图 1 - 2 所 示 。
根 据 三 角 测 量 原 理 可 得 图 像 物 理 坐 标 、摄 像 机 坐 标 之 间 的
转换关系:
(x = f * (xc/zc)
l y = / * (y c/々)
(1-3)
用齐次坐标和矩阵形式表示为:
00 /0 01
〇■
Байду номын сангаас
-x c-
物 理 尺 寸 为 d x 、d y 则 两 个 坐 标 系 之间的转换关系为:
fu = w〇+ x/dx (v = + y/dy
用齐次坐标和矩阵形式表示为:
(1-1)
1.1.2摄 像 机 坐 标 系
00 1/dy 0
0 1.
(1-2)
以 摄 像 机 光 心 为 坐 标 原 点 ,X 。轴 、Y c 轴 分 别 与 x 轴 、y 轴平
•x c-
y〇 = \r
z c L〇r
(1-5)
2018年 第 8 期 福 建 电 脑 .121-
建电脑
COMPUTER
其 中 R 为 3 * 3 正 交 旋 转 矩 阵 ,T 为 3 * 1 平 移 向 量 ,0T= (0,0,0)。
综 合 式 (1-2)、(1-4)、(1-5)可得 :
\fx 0 u 0 0
《基于双目视觉的植物定位和测量算法研究与实现》范文

《基于双目视觉的植物定位和测量算法研究与实现》篇一一、引言随着现代农业科技的飞速发展,精确的植物定位和测量技术对于农业生产、病虫害监测、作物产量评估等领域显得尤为重要。
本文提出了一种基于双目视觉的植物定位和测量算法,通过深度学习和计算机视觉技术,实现对植物的高效定位和精准测量。
该算法不仅能够快速识别植物,还能准确获取其三维空间信息,为农业生产提供有力的技术支持。
二、相关工作在植物定位和测量领域,传统的方法主要依赖于人工观测和手工测量,效率低下且精度不高。
近年来,随着计算机视觉技术的发展,基于单目视觉的植物定位和测量方法逐渐成为研究热点。
然而,单目视觉受光照、角度等因素影响较大,难以实现高精度的三维空间定位。
因此,本文采用双目视觉技术,通过两个相机从不同角度获取图像信息,实现更准确的植物定位和测量。
三、算法原理本算法基于双目视觉原理,通过两个相机从不同角度获取植物图像,利用图像处理技术对两幅图像进行匹配和融合,从而得到植物的三维空间信息。
具体步骤如下:1. 图像获取:利用两个相机从不同角度拍摄植物图像。
2. 图像预处理:对获取的图像进行去噪、灰度化等预处理操作,以便后续处理。
3. 特征提取:利用特征提取算法(如SIFT、SURF等)从两幅图像中提取出特征点。
4. 特征匹配:通过特征匹配算法(如暴力匹配、FLANN匹配等)将两幅图像中的特征点进行匹配。
5. 三维重建:根据匹配的特征点,利用双目视觉的三角测量原理,计算植物的三维空间信息。
6. 植物定位与测量:根据得到的三维空间信息,实现对植物的定位和测量。
四、算法实现本算法采用Python语言实现,主要依赖于OpenCV、NumPy 等计算机视觉和数学计算库。
具体实现步骤如下:1. 相机标定:首先对两个相机进行标定,获取相机的内参和外参。
2. 图像获取与预处理:利用相机拍摄植物图像,并进行去噪、灰度化等预处理操作。
3. 特征提取与匹配:采用SIFT算法从两幅图像中提取特征点,并利用FLANN匹配算法进行特征点匹配。
基于微分进化遗传算法的双目摄像机标定

基于微分进化遗传算法的双目摄像机标定
江祥奎
【期刊名称】《西安邮电学院学报》
【年(卷),期】2011(016)006
【摘要】为提高遗传算法全局寻优的性能,将标准遗传算法改进并运用到摄像机标定,提出一种新的双目摄像机标定方法。
通过改进编码方法,自适应调整变量搜索区间;引入微分进化进行交叉和变异,使群体呈多元化发展。
该方法与现有的非线性标定方法相比,标定精度更高,可有效解决传统优化方法难以解决的多参数、非线性的复杂函数优化问题。
实验结果表明,该方法具有较强的泛化能力,鲁棒性好。
【总页数】4页(P20-23)
【作者】江祥奎
【作者单位】西安邮电学院自动化学院,陕西西安710121
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于OpenCV的双目摄像机标定 [J], 袁利;刘海华;陆雪松
2.基于HALCON的双目摄像机标定 [J], 于春和;祁乐阳
3.基于 OpenCV 的双目摄像机标定技术研究 [J], 王长元;邢世蒙
4.基于改进型神经网络的双目摄像机标定 [J], 延和;吴斌
5.基于PSO-ELM的双目视觉摄像机标定 [J], 周东凯;李刚;王学琨
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Xw烌 烄1 0 u 烌 0 烄 u d x 0 00 f 烄烌 烄 烌 R t Yw 1 1 00 v = 0 f T v0 Z c 0 O 1 Zw d y 1 0 0 1 0 烆 烎 烆 烎 烆1 烎 0 1烎 烆0
( )
Xw烌 烄 0 u 0 α x 0 烄 烌 R t Y w = s0 α 0 0 y v T O 1 Zw 0 0 1 0 烆 烎 烆1 烎 = s M1M2Xw =MXw
B i n o c u l a r C a m e r a C a l i b r a t i o n T e c h n i u e B a s e d o n O e n C V q p
WANG C h a n u a n X I NG S h i m e n g y g ( , ) X i a n T e c h n o l o U n i v e r s i t i a n 1 0 0 2 1 7 g y y X , A b s t r a c t s a f o u n d a t i o n a l r e s e a r c h i n t h e f i e l d o f b i n o c u l a r s t e r e o v i s i o n c a m e r a c a l i b r a t i o n t e c h n i u e h a s r e a t t h e o A - q g r a c t i c a l a e r r e t i c a l v a l u e a n d v a l u e . T h i s f o c u s e s o n t h e b i n o c u l a r s t e r e o v i s i o n c a m e r a c a l i b r a t i o n t e c h n i u e t o a n a l z e t h e p p p q y b i n o c u l a r c a m e r a c a l i b r a t i o n m e t h o d b a s e d o n O e n C V. O e n C V c a m e r a c a l i b r a t i o n b a s e d o n b i n o c u l a r i s m o r e f l e x i b l e t h a n p p , s c a l i n t e c h n i u e s a n d h a s a c a l i b r a t i o n a c c u r a c . t r a d i t i o n a l o o d g q y g , , K e W o r d s a m e r a c a l i b r a t i o n b i n o c u l a r s t e r e o v i s i o n O e n C V c p y C l a s s N u m b e r P 3 9 1 T
图 3 双目立体成像原理图
如图 3 所 示 为 双 目 立 体 成 像 原 理 图 。 左 摄 像
2 3 9 4
王长元等 : 基于 O e n C V 的双目摄像机标定技术研究 p
第4 2卷
机坐标 系 为 OC1 - 图 像 坐 标 系 为o XC1YC1Z x1 C 1, i 1- 有效焦距为 f 有 摄 像 机 坐 标 系 为 OC2 - XC2 YC2 y 1, 1; 图像坐标系为o 有效焦距为 f Z x2 y C 2, i 2- 2, 2。 由摄像机透视变换模型可以分别得到左 、 右两 个摄像机 中 摄 像 机 坐 标 与 图 像 坐 标 之 间 的 关 系 。 而 OC1 - XC1 YC1Z XC2 YC2Z C 1坐 标 系 与 O C 2- C 2坐标系 之间相互位置关系可以通过空间转换矩阵 Ml r 表示 为
2 2 ) ] x x+ [ 2 r +2 x p y+p c o r r e c t e d= 1 2( 2 2 ( ) r +2 +2 x] 3 y y+ [ p y) p c o r r e c t e d= 1( 2 因此 , 共 有 五 个 需 要 的 畸 变 参 数: k k p 1, 2, 1,
双目立体视觉 一 般 由 双 摄 像 机 从 不 同 角 度 同 时 获 取同一景物的两幅数字图像 , 基于视差原理即可获
6] 。 得物体的三维几何信息 [
摄像机标定 是 实 现 双 目 立 体 视 觉 三 维 模 型 重 构中最基本且 最 关 键 的 一 步 。 摄 像 机 标 定 的 目 的 是为了确定摄像机的几何位置 、 属性参数和建立成 像模型以及确 定 世 界 坐 标 系 中 物 体 的 点 与 它 在 图
( ) 西安工业大学 西安 7 1 0 0 2 1
*
摘 要 摄像机标定技术作为双目立体视觉领域的一个基础性研 究 课 题 , 具有很大的理论研究价值和实际应用价值。 论文围绕双目立体视觉中的双目摄像机标定 技 术 , 分析基于 O e n C V 的 双 目 摄 像 机 标 定 的 方 法。基 于 O e n C V 的双目摄 p p 像机标定比传统的定标技术更为灵活 , 并且具有不错的定标精度 。 关键词 摄像机标定 ;双目立体视觉 ; O e n C V p : / 中图分类号 T P 3 9 1 D O I 1 0. 3 9 6 9 9 7 2 2. 2 0 1 4. 1 2. 0 3 8 . i s s n 1 6 7 2 - j
摄像机标定的方法有很多 , 大致可以分 为 传 统 的摄像机标定和摄像机自标定 。 传统的摄像机标定 技术需要有特定的定标参照物 , 根据摄影集合方 面
] 2 。例 如 1 的理论直接 计 算 摄 像 机 参 数[ 9 7 1年 A b -
2 相机标定原理
空间中任意 一 点 到 图 像 像 素 坐 标 系 上 对 应 的
阵, 称 为 投 影 矩 阵; 由于 M1 由 α u v α x、 0、 0 决 定, y、 称这些参数 u v α α x、 0、 0 只与摄像机内部参数有关 , y、 为摄像机内 部 参 数 ; M2 由 摄 像 机 相 对 于 世 界 坐 标 系的方位决定 , 称为摄像机外部参数 。 0 u α x 0 0 烄 烌 故, 摄像机的内部参数为 0 α 自由 0, 0 y v 0 0 1 0 烆 烎 r 1 r 2 r 3 t 1 烄 烌 烄 烌 ; 、 r r r 度为 4 外部参数为 R 4 5 6 t 2 , 3 ×3 = 3 ×1 = t
根据世界坐标与摄像机坐标之间的旋转 、 平移 关系 , 摄像机坐标与图像物理坐标之间的相似三角 形的正比关系 , 图像物理坐标与图像像素坐标之间 比例关系可得图像像素坐标与世界坐标之 的平移 、
3] 。 见式 ( ) 。 间的关系 [ 1
切向畸变是 由 于 透 镜 制 造 上 的 缺 陷 使 得 透 镜 可以用两个另 外 本身与图像平面不平行而产生的 , 的参数 p p 1、 2 来描述 :
3] 。 成像点之间的关系可以表示如图 1 所示 [
d e l z i z和 K a r a r a提 出 的 线 性 变 换 法、 1 9 8 6年 T s a i -A 提出的两步法 。 摄像机自标定技术灵 活 性 强 , 不需 是一种对环境具有很强适应性的标定 技 要标定块 , 术, 利用多幅图像之间的对应关系就可以得出摄 像
1 引言
摄像机标定 是 摄 像 机 测 量 与 真 实 三 维 世 界 测 量的联系桥梁 , 其目的就是要建立三维世界坐标与
1] 。摄像机标 二维图像 坐 标 之 间 的 一 种 对 应 关 系 [
、 机参数 。 在2 0 世纪9 0 年代由 F a u e r a s M a b a n k等 g y 提出 。 O e n C V 中采 用 的 是 介 于 传 统 标 定 方 法 和 自 p 标定方法之间 的 一 种 方 法 , 由 张 正 友 提 出, 称作张
计算机与数字工程
2 3 9 3
分别为世界坐标 标定过程中用到三个坐标系 , 系、 摄像机坐标系和图像坐标系 。 如图 2 所示 。
)由于机 从而引起透镜的径向畸变 ; 是那么规范 , 2 械方面的原因 , 很难做到使得透镜与成像仪完全平 由整个摄像机的组装而引起的畸变就是透 镜的 行,
3] 。 切向畸变 [
一般我们考虑前四个畸变参数 。 k p 2, 3, 即 O e n C V 提供了一个直接 使 用 的 矫 正 算 法 , p ) 输入 原 始 图 像 和 由 函 数 c 得 v C a l i b r a t e C a m e r a 2( 到的畸变系数 。
( )
( ) 1
4 双目摄像机标定原理
5] 。只有当摄 像坐标系 中 对 应 的 像 点 之 间 的 关 系 [
像机被准确标定之后 , 才能根据二维图像平面中的 坐标推导出对应物体的三维空间的实际位置 。
r r r 烆 7 8 9烎
。 自由度为6
t 3 烆 烎
3 透镜的畸变及校正
理论 上 讲 , 透 镜 是 不 应 该 引 起 任 何 畸 变 的, 但 现实中没有完 美 的 透 镜 。 应 其 畸 变 的 原 因 主 要 有 )由于制造方面的原因 , 两点 : 使得透镜的形状不 1
径向畸 变 现 象 来 源 于 “ 筒 形” 或“ 鱼 眼” 影 响。 其原因是远离 透 镜 中 心 的 光 线 弯 曲 比 靠 近 中 心 的 严重 。 成像 仪 中 心 的 畸 变 为 0, 随 着 向 边 缘 移 动, 畸变越来越严重 :
图 2 常用坐标系关系图
2 4 6 ) x x( 1+ k r + k r + k r c o r r e c t e d= 1 2 3 2 4 6 ) ( ) 1+ k r + k r + k r 2 y y( c o r r e c t e d= 1 2 3 这里 ( 是 畸 点 在 成 像 仪 上 的 原 始 位 置, x, y) 2 2 2 ( 是校正后的新位置 , x r =x + y y。 c o r r e c t e d, c o r r e c t e d)