adc转换程序
中微单片机多通道adc程序

中微单片机多通道adc程序
中微电子公司的单片机常用的多通道ADC程序可以使用它们的STM32系列单片机为例进行说明。
在STM32系列单片机中,多通道ADC程序通常涉及以下几个步骤:
1. 初始化ADC模块,首先需要初始化ADC模块,包括设置时钟、引脚配置、转换模式、采样时间等。
这些参数会影响ADC的精度和
采样速度。
2. 配置多通道,接下来需要配置ADC的多通道转换,即选择要
转换的通道和通道顺序。
在STM32中,可以通过设置SQR寄存器来
配置多通道转换的顺序。
3. 启动转换,配置完成后,可以启动ADC转换。
可以选择单次
转换模式或连续转换模式,根据应用需求来决定。
4. 读取转换结果,当转换完成后,可以从数据寄存器中读取转
换结果。
在多通道转换中,需要根据设置的转换顺序逐个读取各个
通道的转换结果。
5. 数据处理,最后,根据应用需求对转换结果进行处理,比如数据滤波、数据存储、数据传输等。
需要注意的是,不同型号的单片机可能会有不同的寄存器和配置方法,因此在编写多通道ADC程序时需要参考具体的芯片手册和相关资料。
以上是关于中微电子公司单片机多通道ADC程序的基本步骤,希望能对你有所帮助。
AD转换
模拟电压输入 1LSB
模拟电压输入 1/2LSB
5
3、偏移误差
偏移误差是指输入信号为零时,输出信号不为零的 值,所以有时又称为零值误差。假定ADC没有非线 性误差,则其转换特性曲线各阶梯中点的连线必定 是直线,这条直线与横轴相交点所对应的输入电压 值就是偏移误差。
积分器输出
VIN
时钟
T1 T T2
t
3
三、A/D转换器的主要技术指标 1、分辨率 ADC的分辨率是指使输出数字量变化一个 相邻数码所需输入模拟电压的变化量。常用 二进制的位数表示。例如12位ADC的分辨率 就是12位,或者说分辨率为满刻度FS的 1/2 1 2 。一个10V满刻度的12位ADC能分辨输 入电压变化最小值是10V×1/ 2 1 2 =2.4mV。
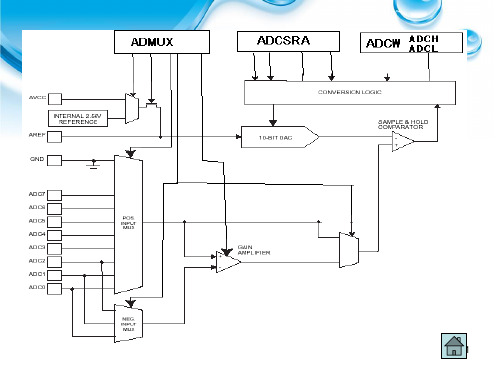
ADC_CONTR寄存器
ADC_RES、 ADC_RESL寄存器
ADC中断控制寄存器
ADC典型应用电路
电压基准源
ADC实现按键输入功能
10VIN 20VIN AG
CE STS
-5V~+5V -10V~+10V
23
采用双极性输入方式,可对±5V或±10V的模拟信号
进行转换。当AD574A与80C31单片机配置时,由于 AD574A输出12位数据,所以当单片机读取转换结果 时,应分两次进行:当A0=0时,读取高8位;当A 0=1时,读取低4位。
需三组电源:+5V、VCC(+12V~+15V)、
VEE(-12V~-15V)。由于转换精度高,所 提供电源必须有良好的稳定性,并进行充分滤波, 以防止高频噪声的干扰。 低功耗:典型功耗为390mW。
py32 adc 例程
py32 adc 例程对于Python 3.2版本的ADC(模数转换器)例程,我们可以使用单片机或者嵌入式开发板来进行ADC的示例程序编写。
以下是一个简单的示例程序,假设我们使用的是树莓派(Raspberry Pi)开发板,并且已经连接了一个模拟信号源到ADC引脚。
python.import spidev.import time.# 初始化SPI.spi = spidev.SpiDev()。
spi.open(0, 0)。
# 从ADC读取数据。
def read_adc(channel):adc = spi.xfer2([1, (8 + channel) << 4, 0])。
data = ((adc[1] & 3) << 8) + adc[2]return data.try:while True:# 读取ADC值。
val = read_adc(0)。
print("ADC值: {}".format(val))。
time.sleep(1)。
except KeyboardInterrupt:spi.close()。
这个示例程序使用了spidev库来进行SPI通信,并通过SPI接口读取ADC转换的数值。
在主循环中,我们不断读取ADC的值并打印出来。
当用户按下Ctrl+C时,程序会捕获KeyboardInterrupt异常并关闭SPI连接。
需要注意的是,具体的ADC连接方式和通信协议可能因硬件而异,上述示例仅供参考。
在实际应用中,需要根据所使用的具体硬件和ADC芯片的规格来编写相应的ADC读取程序。
除了SPI接口外,还有其他的ADC接口和通信协议,如I2C、UART等,具体的例程会根据不同的接口和硬件而有所不同。
希望这个简单的示例程序能够帮助到你理解如何在Python 3.2中编写ADC 例程。
DSP_TMS320F28062模数转换ADC程序

if(tU32>0xFFFF)
{
tU32 = 0xFFFF;
}
return (UINT16)tU32;
}
/* **************************************************************
* 函数名称:LibAdcGetPhotoDiodeVoltage
* 函数名称:LibAdcInit
* 功能描述:初始化 ADC 配置
*作
者:
* 修改记录:20130603 v1.0
* *********************************************************** */
void LibAdcInit()
{
// Configure ADC
tU32 = tU32*3300;
tU32 = tU32/4095;
tU32 *= (7150+560);
tU32 = tU32/560;
if(tU32>0xFFFF)
{
tU32 = 0xFFFF;
}
return tU32;
}
/* **************************************************************
* *********************************************************** */
__interrupt void LibAdcIsr(void)
{
LibVarAdcResult[0] = AdcResult.ADCRESULT0;
LibVarAdcResult[1] = AdcResult.ADCRESULT1;
九齐单片机AD转换程序代码
九齐单片机AD转换程序代码解析与优化引言单片机的模数转换(Analog-to-Digital Conversion,简称ADC)是许多嵌入式系统中的重要功能之一。
九齐单片机广泛应用于各种应用领域,因此了解如何有效地进行ADC转换至关重要。
本文将深入探讨九齐单片机的AD转换程序代码,并提供优化建议,以确保高质量、高效率的ADC数据采集。
九齐单片机AD转换简介九齐单片机是一种常用的嵌入式系统开发平台,其内置模数转换器(ADC)允许用户将模拟信号转换为数字值,以供微控制器进行处理。
通常,AD转换程序代码的目标是获取模拟信号的准确数字表示。
以下是一个简单的九齐单片机AD转换程序代码的示例:#include <stdio.h>#include "jz_adc.h"int main() {jz_adc_init(); // 初始化ADCint result;while (1) {result = jz_adc_read(); // 读取ADC值printf("ADC Value: %d\n", result);}return 0;}在这个示例中,我们首先包含了必要的库和头文件,然后初始化了ADC,接着在一个无限循环中读取ADC值,并将其打印出来。
虽然这个代码足够简单,但它可以进一步优化以提高性能和可维护性。
代码优化建议1. 错误处理在上述代码中,没有包含错误处理机制。
如果初始化或读取过程中出现错误,代码将无法处理,这可能导致不稳定的系统行为。
我们建议添加错误处理代码,以确保程序可以适当地处理异常情况。
#include <stdio.h>#include "jz_adc.h"int main() {if (jz_adc_init() != 0) {printf("ADC initialization failed.\n");return 1;}int result;while (1) {result = jz_adc_read();if (result < 0) {printf("ADC reading failed.\n");return 2;}printf("ADC Value: %d\n", result);}return 0;}2. 中断处理上述代码是一个简单的轮询方式来读取ADC值,但这种方式会占用CPU时间,不适用于需要高效率的应用。
三相电压电流adc算法程序

三相电压电流adc算法程序
三相电压电流ADC算法程序。
在电力系统中,对三相电压和电流进行准确的测量和采集是非
常重要的。
为了实现对三相电压和电流的准确采集,通常会使用
ADC(模数转换器)来进行数字化处理。
ADC算法程序是用来对采集
到的模拟信号进行数字化处理的关键工具。
首先,我们需要对三相电压和电流进行采集。
这可以通过传感
器或者变压器来实现。
采集到的模拟信号需要经过滤波和放大处理,然后再输入到ADC中进行数字化处理。
ADC算法程序需要考虑到电压和电流的波形特性,以及系统的
采样率和精度要求。
通常会采用差分输入方式来对三相电压和电流
进行采集,以提高抗干扰能力和准确性。
在数字化处理过程中,需要进行采样、量化和编码等步骤,以
将模拟信号转换为数字信号。
此外,还需要考虑到数据通信和存储
的需求,以便将采集到的数据传输给上位机或者进行存储和分析。
ADC算法程序的设计需要综合考虑系统的实际需求和性能指标,以确保对三相电压和电流的准确采集和处理。
同时,还需要考虑到
系统的稳定性和可靠性,以确保系统在各种工作条件下都能够正常
运行。
总之,三相电压电流ADC算法程序是实现对三相电压和电流准
确采集和数字化处理的关键技术,它对于电力系统的运行和监测具
有重要意义。
通过不断优化和改进ADC算法程序,可以提高电力系
统的运行效率和安全性,为电力系统的智能化和自动化发展提供有
力支持。
ADC转换程序
二,ADC0808/0809與8031單片機的介面設計ADC0808/0809與8031單片機的硬體介面有三種方式,查詢方式,中斷方式和等待延時方式.究竟採用何種方式,應視具體情況,按總體要求而選擇.1.延時方式ADC0809編程模式在軟體編寫時,應令p2.7=A15=0;A0,A1,A2給出被選擇的模擬通道的地址;執行一條輸出指令,啟動A/D轉換;執行一條輸入指令,讀取A/D轉換結果.通道地址:7FF8H~7FFFH下麵的程式是採用延時的方法,分別對8路模擬信號輪流採樣一次,並依次把結果轉存到數據存儲區的採樣轉換程式.START: MOV R1, #50H ;置數據區首地址MOV DPTR, #7FF8H ;P2.7=0且指向通道0MOV R7, #08H ;置通道數NEXT: MOVX @DPTR,A ;啟動A/D轉換MOV R6, #0AH ;軟體延時DLAY: NOPNOPNOPDJNZ R6, DLAYMOVX A, @DPTR ;讀取轉換結果MOV @ R1, A ;存儲數據INC DPTR ;指向下一個通道INC R1 ;修改數據區指針DJNZ R7, NEXT ;8個通道全採樣完了嗎........2.中斷方式將ADC0808/0809作為一個外部擴展的並行I/O口,直接由8031的P2.0和脈衝進行啟動.通道地址為FEF8H~FEFFH用中斷方式讀取轉換結果的數字量,模擬量輸入通路選擇端A,B,C分別與8031的P0.0,P0.1,P0.2(經74LS373)相連,CLK由8031的ALE提供.INTADC:SETB IT1 ;選擇為邊沿觸發方式SETB EA ;開中斷SETB EX1 ;MOV DPTR, #0FEF8H ;通道地址送DPTRMOVX @DPTR,A ;啟動A/D轉換……PINT1: ……MOV DPTR, #0FEF8H ; 通道地址送DPTRMOVX A, @ DPTR;讀取從IN0輸入的轉換結果存入MOV 50H, A ;50H單元MOVX @DPTR,A ;啟動A/D轉換RETI ;中斷返回3.2 主程序主程序主要是設置數據區的起始地址為60H ,模擬路數為8路,設置外部中斷方式是下降沿觸發,開總中斷,向ADC0809寫數據啟動AD 轉換圖1 主流程圖的設計框架3.3中斷服務程式中斷服務程式主要完成取AD 轉換結果存儲,模擬路數自增1,存儲區自增1,判斷8路是否轉換完畢,若完畢則返回。
STM32利用DMA实现多通道ADC转换程序实例
网上很多类似资料,总结就是要么给出不完整的一部分,要么就是没有标注说明之类的,鞋面我给大家贴出实用型的,包括如何配置DMA和ADC,如何采集数据,如何处理数据//系统时钟使用72MHZunsigned short AD_Value[5]={0};//定义成半字节数组void RCC_Config(void){ErrorStatus HSEStartUpStatus;//定义枚举型变量RCC_DeInit();RCC_HSEConfig(RCC_HSE_ON);HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus==SUCCESS){RCC_HCLKConfig(RCC_SYSCLK_Div1);RCC_PCLK2Config(RCC_HCLK_Div1);RCC_PCLK1Config(RCC_HCLK_Div2);FLASH_SetLatency(FLASH_Latency_2);FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_9);RCC_PLLCmd(ENABLE);while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY)==RESET);RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);while(RCC_GetSYSCLKSource()!=0x08);}//---打开设备时钟---//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Pe riph_GPIOF,ENABLE);//RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//开串口1和ADC1的时钟}void ADC_Start(void){DMA_Cmd(DMA1_Channel1, ENABLE); //启动DMA通道ADC_SoftwareStartConvCmd(ADC1, ENABLE);//软件启动转换}void DMA_ADC_Config(void){ADC_InitTypeDef ADC_InitStructure;DMA_InitTypeDef DMA_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //设置成模拟输入GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_0);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //设置成模拟输入GPIO_Init(GPIOB, &GPIO_InitStructure);RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);//开ADC1的时钟RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); //开DMA时钟RCC_ADCCLKConfig(RCC_PCLK2_Div8);//配置ADC时钟,为PCLK2的8分频,即9MHzDMA_DeInit(DMA1_Channel1);//ADC挂接在DMA的通道1上DMA_InitStructure.DMA_PeripheralBaseAddr = ADC_DR_ADDRESS; //DMA外设ADC基地址DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&AD_Value;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //内存作为数据传输的目的地DMA_InitStructure.DMA_BufferSize = 5; //DMA通道的DMA缓存的大小系统用5个通道DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变即地址ADC1->DR不变DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增即数组AD_Value地址增加DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //数据宽度为16位,这里尤其注意因为选择的是半字节的,所以定义数组的时候也要定义成半字节数组,否则采集数据出乱,很多人是贴出资料来了,但是根本没有把这些注意点写明DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //数据宽度为16位DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //工作在循环缓存模式DMA_InitStructure.DMA_Priority = DMA_Priority_High; //DMA通道x拥有高优先级DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x设置为非内存到内存传输DMA_Init(DMA1_Channel1, &DMA_InitStructure);//DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,ENABLE);ADC_DeInit(ADC1);ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式ADC_InitStructure.ADC_ScanConvMode =ENABLE; //模数转换工作在扫描模式ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//连续转换//ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //注意不要使用持续转换模式,否则只要触发一次后续的转换就会永不停歇(除非CONT清0),这样第一次以后的ADC,就不是由TIM1_CC1来触发了ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐ADC_InitStructure.ADC_NbrOfChannel = 5; //顺序进行规则转换的ADC通道的数目ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器//设置指定ADC的规则组通道,设置它们的转化顺序和采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 1, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 2, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_6, 3, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_7, 4, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 5, ADC_SampleTime_239Cycles5);ADC_ExternalTrigInjectedConvCmd(ADC1,DISABLE);ADC_DMACmd(ADC1, ENABLE); // 开启ADC的DMA支持(要实现DMA功能,还需独立配置DMA通道等参数)ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1ADC_ResetCalibration(ADC1);//复位校准寄存器while(ADC_GetResetCalibrationStatus(ADC1)); //获取ADC1复位校准寄存器的状态,设置状态则等待ADC_StartCalibration(ADC1); //开始指定ADC1的校准状态while(ADC_GetCalibrationStatus(ADC1)); //获取指定ADC1的校准程序,设置状态则等待ADC_Start();}//数据采集处理void ADC_DateProcess(void){unsigned char i,k,h;unsigned int Buf=0;//递推先进先出原理ADCCollect.PVVoltageBuf[9]=get_ChannelVale(ADC_Channel_4)&0xfff;ADCCollect.BatteryVoltageBuf[9]=get_ChannelVale(ADC_Channel_5)&0xfff;ADCCollect.CirTem1Buf[9]=get_ChannelVale(ADC_Channel_6)&0xfff;ADCCollect.BatteryChargeCurrentBuf[9]=get_ChannelVale(ADC_Channel_7)&0xfff;ADCCollect.BatteryDisChargeCurrentBuf[9]=get_ChannelVale(ADC_Channel_8)&0xfff;for(i=0;i<9;i++){ADCCollect.PVVoltageBuf[i]=ADCCollect.PVVoltageBuf[1+i];ADCCollect.BatteryVoltageBuf[i]=ADCCollect.BatteryVoltageBuf[1+i];ADCCollect.CirTem1Buf[i]=ADCCollect.CirTem1Buf[1+i];ADCCollect.BatteryChargeCurrentBuf[i]=ADCCollect.BatteryChargeCurrentBuf[1+i];ADCCollect.BatteryDisChargeCurrentBuf[i]=ADCCollect.BatteryDisChargeCurrentBuf[1+i];}//排序for(k=0; k<9; k++ )//{for(h=0 ; h<9 - k ; h++)//{Buf=0;if(ADCCollect.PVVoltageBuf[h] > ADCCollect.PVVoltageBuf[h+1]){Buf = ADCCollect.PVVoltageBuf[h+1];ADCCollect.PVVoltageBuf[h+1] = ADCCollect.PVVoltageBuf[h];ADCCollect.PVVoltageBuf[h] = Buf;}Buf=0;if(ADCCollect.BatteryVoltageBuf[h] > ADCCollect.BatteryVoltageBuf[h+1]){Buf = ADCCollect.BatteryVoltageBuf[h+1];ADCCollect.BatteryVoltageBuf[h+1] = ADCCollect.BatteryVoltageBuf[h];ADCCollect.BatteryVoltageBuf[h] = Buf;}Buf=0;if(ADCCollect.CirTem1Buf[h] > ADCCollect.CirTem1Buf[h+1]){Buf = ADCCollect.CirTem1Buf[h+1];ADCCollect.CirTem1Buf[h+1] = ADCCollect.CirTem1Buf[h];ADCCollect.CirTem1Buf[h] = Buf;}Buf=0;if(ADCCollect.BatteryChargeCurrentBuf[h] > ADCCollect.BatteryChargeCurrentBuf[h+1]){Buf = ADCCollect.BatteryChargeCurrentBuf[h+1];ADCCollect.BatteryChargeCurrentBuf[h+1] = ADCCollect.BatteryChargeCurrentBuf[h];ADCCollect.BatteryChargeCurrentBuf[h] = Buf;}}}ADCCollect.CirTem1=0;ADCCollect.BatteryChargeCurrent=0;ADCCollect.BatteryDisChargeCurrent=0;ADCCollect.BatteryVoltage=0;ADCCollect.PVVoltage=0;//去掉最大值和最小值取平均值for(i=3;i<7;i++)//{ADCCollect.CirTem1+=ADCCollect.CirTem1Buf[i];ADCCollect.BatteryChargeCurrent+=ADCCollect.BatteryChargeCurrentBuf[i];ADCCollect.BatteryDisChargeCurrent+=ADCCollect.BatteryDisChargeCurrentBuf[i];ADCCollect.BatteryVoltage+=ADCCollect.BatteryVoltageBuf[i];ADCCollect.PVVoltage+=ADCCollect.PVVoltageBuf[i];}ADCCollect.CirTem1=ADCCollect.CirTem1/4;ADCCollect.BatteryChargeCurrent=ADCCollect.BatteryChargeCurrent/4;ADCCollect.BatteryDisChargeCurrent=ADCCollect.BatteryDisChargeCurrent/4;ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage/4;ADCCollect.PVVoltage=ADCCollect.PVVoltage/4;//充电电流ADCCollect.BatteryChargeCurrent=(ADCCollect.BatteryChargeCurrent*33)/4096;ADCCollect.BatteryChargeCurrent=(ADCCollect.BatteryChargeCurrent*30)/31;if(ADCCollect.BatteryChargeCurrent<0.2){ADCCollect.BatteryChargeCurrent=0;}//电池电压ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage*33/40960;ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage*3068/68;//放电电流ADCCollect.BatteryDisChargeCurrent=(ADCCollect.BatteryDisChargeCurrent*33)/4096;ADCCollect.BatteryDisChargeCurrent=(ADCCollect.BatteryDisChargeCurrent*30)/31;if(ADCCollect.BatteryDisChargeCurrent<0.2){ADCCollect.BatteryDisChargeCurrent=0;}//PV电压ADCCollect.PVVoltage=ADCCollect.PVVoltage*33/40960;ADCCollect.PVVoltage=ADCCollect.PVVoltage*3068/68;//温度ADCCollect.CirTem1=NTC_Temperature(ADCCollect.CirTem1);ADCCollect.CirTem1=ADCCollect.CirTem1/10;}。
ADC0804工作原理其程序
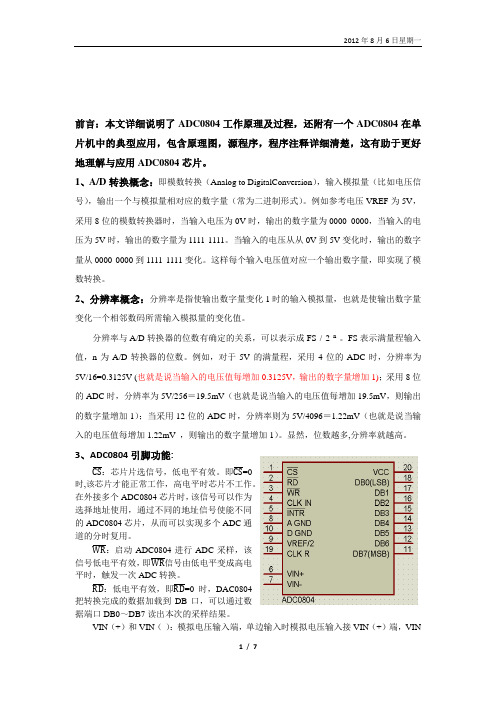
前言:本文详细说明了ADC0804工作原理及过程,还附有一个ADC0804在单片机中的典型应用,包含原理图,源程序,程序注释详细清楚,这有助于更好地理解与应用ADC0804芯片。
1、A/D转换概念:即模数转换(Analog to DigitalConversion),输入模拟量(比如电压信号),输出一个与模拟量相对应的数字量(常为二进制形式)。
例如参考电压VREF为5V,采用8位的模数转换器时,当输入电压为0V时,输出的数字量为0000 0000,当输入的电压为5V时,输出的数字量为1111 1111。
当输入的电压从从0V到5V变化时,输出的数字量从0000 0000到1111 1111变化。
这样每个输入电压值对应一个输出数字量,即实现了模数转换。
2、分辨率概念:分辨率是指使输出数字量变化1时的输入模拟量,也就是使输出数字量变化一个相邻数码所需输入模拟量的变化值。
分辨率与A/D转换器的位数有确定的关系,可以表示成FS / 2 n 。
FS表示满量程输入值,n为A/D转换器的位数。
例如,对于5V的满量程,采用4位的ADC时,分辨率为5V/16=0.3125V (也就是说当输入的电压值每增加0.3125V,输出的数字量增加1);采用8位的ADC时,分辨率为5V/256=19.5mV(也就是说当输入的电压值每增加19.5mV,则输出的数字量增加1);当采用12位的ADC时,分辨率则为5V/4096=1.22mV(也就是说当输入的电压值每增加1.22mV ,则输出的数字量增加1)。
显然,位数越多,分辨率就越高。
3、ADC0804引脚功能:CS:芯片片选信号,低电平有效。
即CS=0时,该芯片才能正常工作,高电平时芯片不工作。
在外接多个ADC0804芯片时,该信号可以作为选择地址使用,通过不同的地址信号使能不同的ADC0804芯片,从而可以实现多个ADC通道的分时复用。
WR:启动ADC0804进行ADC采样,该信号低电平有效,即WR信号由低电平变成高电平时,触发一次ADC转换。
STM32使用HAL库实现ADC单通道转换

STM32使⽤HAL库实现ADC单通道转换 STM32的ADC转换还是很强⼤的,它具有多个通道选择,这⾥我就不细说,不了解的可以⾃⾏百度,这⾥只是选取单通道,实现ADC 转换。
在⽂章开始之前,我说⼀下数据左对齐跟右对齐的差别,以前⼀直糊⾥糊涂的,记录下来以免以后⾃⼰忘记。
12位⼆进制最⼤值为0x0FFF 左对齐操作后的结果是 0xFFF0,右对齐后还是0x0FFF。
反过来看,若寄存器⾥左对齐的数据值X (相当于实际数据*16,所以左对齐转换的值要/16才是实际的值),则X>>4才是实际的数据。
⽽右对齐,则是数据保持不变,采集到多少就多少。
⾄于是按左对齐保存到寄存器还是按照右对齐,就看你的配置⾥如何选了。
好了,下⾯就开始说明怎么⽤STM32CUBEMX实现ADC单通道转换吧。
利⽤中断模式1、配置ADC引脚2、开定时跟串⼝,定时器⽤来定时打开ADC转换,这样可以达到1S内控制ADC转换次数的⽬的,不过有个限制,这⾥样⼦控制ADC转换次数的话,如果采样次数多,配置ADC采样速度时⼀定要够快,正常配置ADC的采样频率可以通过改变其采样速度来设置的,这⾥我是为了⽅便处理,就直接⽤定时器去开启了;⽽串⼝则是打印转换后的电压⽤的。
3、配置时钟4、配置ADC设置 `5、开启中断模式6、串⼝配置默认即可7、定时器配置,定时器配置的是进⼊定时器中断的频率,定时时间可以根据这个频率换算出来,这⾥定时器的频率 = 72M / 72 /1000=1000Hz,所以定时时间为 T = 1S/f = 1S/1000 = 1ms,所以我这⾥配置定时为1ms。
8、基本配置我们完成了,现在我们⽣成⼯程⽤KEIL5打开9、打开⼯程,我们现在进⼊代码部分 这⾥我们只需要重写定时器中断回调函数跟,ADC转换回调中断函数即可。
在main⽂件⾥添加这下⾯这两个函数void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) //定时器中断回调{HAL_ADC_Start_IT(&hadc1); //定时器中断⾥⾯开启ADC中断转换,1ms开启⼀次采集}void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) //ADC转换完成回调{HAL_ADC_Stop_IT(&hadc1); //关闭ADCHAL_TIM_Base_Stop_IT(&htim3); //关闭定时器AD_Value=HAL_ADC_GetValue(&hadc1); //获取ADC转换的值Value_1=(float)(AD_Value*3.3/4096); //ADC换算,这⾥参考电压3.3V,12位的ADC满量程为2^12=4096,转换出来的单位是Vprintf("%.4f\r\n",Value_2[j-10000]); //串⼝打印信息HAL_TIM_Base_Start_IT(&htim3); //开启定时器} 到这⾥就完成单通道ADC中断转换的所有步骤啦,通过串⼝助⼿实测转换结果误差为0.0008v。
STM32利用DMA实现多通道ADC转换程序实例.docx
网上很多类似资料,总结就是要么给出不完整的一部分,要么就是没有标注说明之类的,鞋面我给大家贴出实用型的,包括如何配置DMA和ADC,如何采集数据,如何处理数据//系统时钟使用72MHZunsigned short AD_Value[5]={0};//定义成半字节数组void RCC_Config(void){ErrorStatus HSEStartUpStatus;//定义枚举型变量RCC_DeInit();RCC_HSEConfig(RCC_HSE_ON);HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus==SUCCESS){RCC_HCLKConfig(RCC_SYSCLK_Div1);RCC_PCLK2Config(RCC_HCLK_Div1);RCC_PCLK1Config(RCC_HCLK_Div2);FLASH_SetLatency(FLASH_Latency_2);FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable);RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_9);RCC_PLLCmd(ENABLE);while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY)==RESET);RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);while(RCC_GetSYSCLKSource()!=0x08);}//---打开设备时钟---//RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOF,ENABLE);//RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//开串口1和ADC1的时钟}void ADC_Start(void){DMA_Cmd(DMA1_Channel1, ENABLE); //启动DMA通道ADC_SoftwareStartConvCmd(ADC1, ENABLE);//软件启动转换}void DMA_ADC_Config(void){ADC_InitTypeDef ADC_InitStructure;DMA_InitTypeDef DMA_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //设置成模拟输入GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_0);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //设置成模拟输入GPIO_Init(GPIOB, &GPIO_InitStructure);RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);//开ADC1的时钟RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE); //开DMA时钟RCC_ADCCLKConfig(RCC_PCLK2_Div8);//配置ADC时钟,为PCLK2的8分频,即9MHzDMA_DeInit(DMA1_Channel1);//ADC挂接在DMA的通道1上DMA_InitStructure.DMA_PeripheralBaseAddr = ADC_DR_ADDRESS; //DMA外设ADC基地址DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&AD_Value;DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //内存作为数据传输的目的地DMA_InitStructure.DMA_BufferSize = 5; //DMA通道的DMA缓存的大小系统用5个通道DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变即地址ADC1->DR不变DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增即数组AD_Value地址增加DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //数据宽度为16位,这里尤其注意因为选择的是半字节的,所以定义数组的时候也要定义成半字节数组,否则采集数据出乱,很多人是贴出资料来了,但是根本没有把这些注意点写明DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //数据宽度为16位DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //工作在循环缓存模式DMA_InitStructure.DMA_Priority = DMA_Priority_High; //DMA通道x拥有高优先级DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x设置为非内存到内存传输DMA_Init(DMA1_Channel1, &DMA_InitStructure);//DMA_ITConfig(DMA1_Channel1,DMA_IT_TC,ENABLE);ADC_DeInit(ADC1);ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式ADC_InitStructure.ADC_ScanConvMode =ENABLE; //模数转换工作在扫描模式ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;//连续转换//ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //注意不要使用持续转换模式,否则只要触发一次后续的转换就会永不停歇(除非CONT清0),这样第一次以后的ADC,就不是由TIM1_CC1来触发了ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐ADC_InitStructure.ADC_NbrOfChannel = 5; //顺序进行规则转换的ADC通道的数目ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器//设置指定ADC的规则组通道,设置它们的转化顺序和采样时间ADC_RegularChannelConfig(ADC1, ADC_Channel_4, 1, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_5, 2, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_6, 3, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_7, 4, ADC_SampleTime_239Cycles5);ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 5, ADC_SampleTime_239Cycles5);ADC_ExternalTrigInjectedConvCmd(ADC1,DISABLE);ADC_DMACmd(ADC1, ENABLE); // 开启ADC的DMA支持(要实现DMA效用,还需独立配置DMA通道等参数)ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1ADC_ResetCalibration(ADC1);//复位校准寄存器while(ADC_GetResetCalibrationStatus(ADC1)); //获取ADC1复位校准寄存器的状态,设置状态则等待ADC_StartCalibration(ADC1); //开始指定ADC1的校准状态while(ADC_GetCalibrationStatus(ADC1)); //获取指定ADC1的校准程序,设置状态则等待ADC_Start();}//数据采集处理void ADC_DateProcess(void){unsigned char i,k,h;unsigned int Buf=0;//递推先进先出原理ADCCollect.PVVoltageBuf[9]=get_ChannelVale(ADC_Channel_4)&0xfff;ADCCollect.BatteryVoltageBuf[9]=get_ChannelVale(ADC_Channel_5)&0xfff;ADCCollect.CirTem1Buf[9]=get_ChannelVale(ADC_Channel_6)&0xfff;ADCCollect.BatteryChargeCurrentBuf[9]=get_ChannelVale(ADC_Channel_7)&0xfff;ADCCollect.BatteryDisChargeCurrentBuf[9]=get_ChannelVale(ADC_Channel_8)&0xfff;for(i=0;i<9;i++){ADCCollect.PVVoltageBuf[i]=ADCCollect.PVVoltageBuf[1+i];ADCCollect.BatteryVoltageBuf[i]=ADCCollect.BatteryVoltageBuf[1+i];ADCCollect.CirTem1Buf[i]=ADCCollect.CirTem1Buf[1+i];ADCCollect.BatteryChargeCurrentBuf[i]=ADCCollect.BatteryChargeCurrentBuf[1+i];ADCCollect.BatteryDisChargeCurrentBuf[i]=ADCCollect.BatteryDisChargeCurrentBuf[1+i];}//排序for(k=0; k<9; k++ )//{for(h=0 ; h<9 - k ; h++)//{Buf=0;if(ADCCollect.PVVoltageBuf[h] > ADCCollect.PVVoltageBuf[h+1]){Buf = ADCCollect.PVVoltageBuf[h+1];ADCCollect.PVVoltageBuf[h+1] = ADCCollect.PVVoltageBuf[h];ADCCollect.PVVoltageBuf[h] = Buf;}Buf=0;if(ADCCollect.BatteryVoltageBuf[h] > ADCCollect.BatteryVoltageBuf[h+1]){Buf = ADCCollect.BatteryVoltageBuf[h+1];ADCCollect.BatteryVoltageBuf[h+1] = ADCCollect.BatteryVoltageBuf[h];ADCCollect.BatteryVoltageBuf[h] = Buf;}Buf=0;if(ADCCollect.CirTem1Buf[h] > ADCCollect.CirTem1Buf[h+1]){Buf = ADCCollect.CirTem1Buf[h+1];ADCCollect.CirTem1Buf[h+1] = ADCCollect.CirTem1Buf[h];ADCCollect.CirTem1Buf[h] = Buf;}Buf=0;if(ADCCollect.BatteryChargeCurrentBuf[h] > ADCCollect.BatteryChargeCurrentBuf[h+1]){Buf = ADCCollect.BatteryChargeCurrentBuf[h+1];ADCCollect.BatteryChargeCurrentBuf[h+1] = ADCCollect.BatteryChargeCurrentBuf[h];ADCCollect.BatteryChargeCurrentBuf[h] = Buf;}}}ADCCollect.CirTem1=0;ADCCollect.BatteryChargeCurrent=0;ADCCollect.BatteryDisChargeCurrent=0;ADCCollect.BatteryVoltage=0;ADCCollect.PVVoltage=0;//去掉最大值和最小值取平均值for(i=3;i<7;i++)//{ADCCollect.CirTem1+=ADCCollect.CirTem1Buf[i];ADCCollect.BatteryChargeCurrent+=ADCCollect.BatteryChargeCurrentBuf[i];ADCCollect.BatteryDisChargeCurrent+=ADCCollect.BatteryDisChargeCurrentBuf[i];ADCCollect.BatteryVoltage+=ADCCollect.BatteryVoltageBuf[i];ADCCollect.PVVoltage+=ADCCollect.PVVoltageBuf[i];}ADCCollect.CirTem1=ADCCollect.CirTem1/4;ADCCollect.BatteryChargeCurrent=ADCCollect.BatteryChargeCurrent/4; ADCCollect.BatteryDisChargeCurrent=ADCCollect.BatteryDisChargeCurrent/4; ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage/4;ADCCollect.PVVoltage=ADCCollect.PVVoltage/4;//充电电流ADCCollect.BatteryChargeCurrent=(ADCCollect.BatteryChargeCurrent*33)/4096; ADCCollect.BatteryChargeCurrent=(ADCCollect.BatteryChargeCurrent*30)/31;if(ADCCollect.BatteryChargeCurrent<0.2){ADCCollect.BatteryChargeCurrent=0;}//电池电压ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage*33/40960;ADCCollect.BatteryVoltage=ADCCollect.BatteryVoltage*3068/68;//放电电流ADCCollect.BatteryDisChargeCurrent=(ADCCollect.BatteryDisChargeCurrent*33)/4096; ADCCollect.BatteryDisChargeCurrent=(ADCCollect.BatteryDisChargeCurrent*30)/31;if(ADCCollect.BatteryDisChargeCurrent<0.2){ADCCollect.BatteryDisChargeCurrent=0;}//PV电压ADCCollect.PVVoltage=ADCCollect.PVVoltage*33/40960;ADCCollect.PVVoltage=ADCCollect.PVVoltage*3068/68;//温度ADCCollect.CirTem1=NTC_Temperature(ADCCollect.CirTem1);ADCCollect.CirTem1=ADCCollect.CirTem1/10;}科教兴国。
STM32ADC多通道转换DMA模式与非DMA模式两种方法(HAL库)
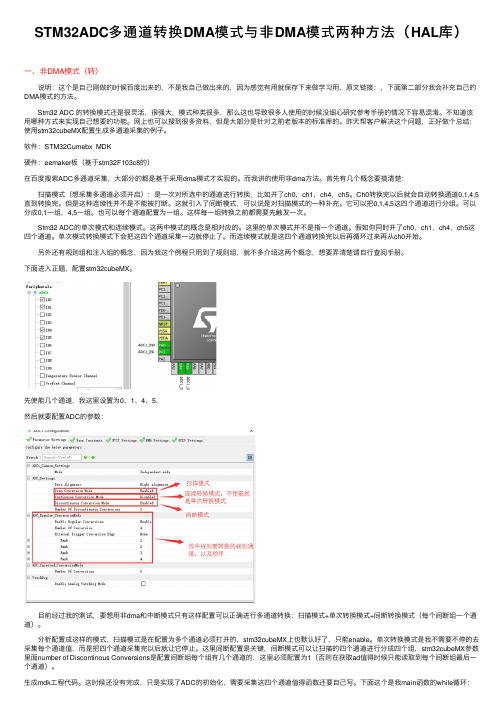
STM32ADC多通道转换DMA模式与⾮DMA模式两种⽅法(HAL库)⼀、⾮DMA模式(转) 说明:这个是⾃⼰刚做的时候百度出来的,不是我⾃⼰做出来的,因为感觉有⽤就保存下来做学习⽤,原⽂链接:,下⾯第⼆部分我会补充⾃⼰的DMA模式的⽅法。
Stm32 ADC 的转换模式还是很灵活,很强⼤,模式种类很多,那么这也导致很多⼈使⽤的时候没细⼼研究参考⼿册的情况下容易混淆。
不知道该⽤哪种⽅式来实现⾃⼰想要的功能。
⽹上也可以搜到很多资料,但是⼤部分是针对之前⽼版本的标准库的。
昨天帮客户解决这个问题,正好做个总结:使⽤stm32cubeMX配置⽣成多通道采集的例⼦。
软件:STM32Cumebx MDK硬件:eemaker板(基于stm32F103c8的)在百度搜索ADC多通道采集,⼤部分的都是基于采⽤dma模式才实现的。
⽽我讲的使⽤⾮dma⽅法。
⾸先有⼏个概念要搞清楚: 扫描模式(想采集多通道必须开启):是⼀次对所选中的通道进⾏转换,⽐如开了ch0,ch1,ch4,ch5。
Ch0转换完以后就会⾃动转换通道0,1,4,5直到转换完。
但是这种连续性并不是不能被打断。
这就引⼊了间断模式,可以说是对扫描模式的⼀种补充。
它可以把0,1,4,5这四个通道进⾏分组。
可以分成0,1⼀组,4,5⼀组。
也可以每个通道配置为⼀组。
这样每⼀组转换之前都需要先触发⼀次。
Stm32 ADC的单次模式和连续模式。
这两中模式的概念是相对应的。
这⾥的单次模式并不是指⼀个通道。
假如你同时开了ch0,ch1,ch4,ch5这四个通道。
单次模式转换模式下会把这四个通道采集⼀边就停⽌了。
⽽连续模式就是这四个通道转换完以后再循环过来再从ch0开始。
另外还有规则组和注⼊组的概念,因为我这个例程只⽤到了规则组,就不多介绍这两个概念,想要弄清楚请⾃⾏查阅⼿册。
下⾯进⼊正题,配置stm32cubeMX。
先使能⼏个通道,我这⾥设置为0、1、4、5.然后就要配置ADC的参数: ⽬前经过我的测试,要想⽤⾮dma和中断模式只有这样配置可以正确进⾏多通道转换:扫描模式+单次转换模式+间断转换模式(每个间断组⼀个通道)。
ATmega16之AD转换与ADC中断程序
1、ATmega16内部ADC特点
12
2、模拟噪声抑制技术
• 设备内部及外部的数字电路都会产生电磁 干扰(EMI),从而影响模拟测量的精度。如 果转换精度要求较高,那么可以通过以下 方法来减少噪声:
- 1. 模拟通路越短越好。保证模拟信号线位于模拟地之上 ,并使它们与高速切换的数字信号线分开。 - 2. AVCC 应通过 LC 网络与数字电压源 VCC 连接。 - 3. 使用 ADC 噪声抑制器来降低来自 CPU 的干扰噪声。 - 4. 如果有其他 ADC 端口被用作数字输出,那么必须保 证在转换进行过程中它们不会有电平的切换。
39
• 平均滤波:对一个参数进行连续的多次采样,然后取其平 均值。因为是在很短的时间内进行的多次采样,对消除高 频干扰是较有效的。
• 一阶滞后滤波:设上个采样周期的测量结果为Yn-1,本次 转换值为xn,滤波系数为α,0<=α<1,本次的测量结果为 Yn,则Yn=α×Yn-1+(1-α)×xn。α越大,滤波作用越强。
36
SFIOR
4、ADC及相关寄存器
• 中断寄存器 - SREG
- Bit 7 – I: 全局中断使能
I 置位时使能全局中断。单独的中断使能由其他独立的控制寄存器控制 。如果 I 清零,则不论单独中断标志置位与否,都不会产生中断。任意一个 中断发生后 I 清零,而执行 RETI 指令后 I 恢复置位以使能中断。I 也可以通 过 SEI 和 CLI 指令来置位和清零。
ADPS1 0 0 1 1 0 0 1 1
ADPS1 0 1 0 1 0 1 0 1
分频因子 2 2 4 8 16 32 64
128
28
ADCL 及 ADCH
stm32无感六步换相adc反电势程序

stm32无感六步换相adc反电势程序STM32是一种常用的嵌入式开发平台,具有强大的功能和灵活的配置选项。
在许多应用中,需要测量电机的转速和位置,以便控制其运行。
为了实现这一功能,可以使用STM32的无感六步换相ADC 反电势程序。
在电机控制中,无感六步换相是一种常用的控制策略。
它通过测量电机相电流的反电势来确定电机的转速和位置。
反电势是由电机转子的磁场感应产生的,可以用来推断电机的运动状态。
在STM32中,可以使用ADC(模数转换器)来测量电机相电流的反电势。
ADC是一种将模拟信号转换为数字信号的设备。
通过将电机相电流的反电势连接到ADC引脚上,可以实时测量电机的转速和位置。
为了实现无感六步换相ADC反电势程序,需要进行以下步骤:1. 配置ADC模块:首先,需要配置ADC模块的参数,包括采样率、分辨率等。
可以使用STM32提供的库函数来完成这一步骤。
2. 设置引脚:将电机相电流的反电势连接到ADC引脚上。
可以使用STM32的引脚映射功能来实现这一步骤。
3. 初始化ADC:在程序开始时,需要初始化ADC模块。
可以使用库函数来完成初始化操作。
4. 启动ADC转换:一旦ADC模块初始化完成,就可以启动ADC 转换。
通过调用库函数,可以开始ADC采样。
5. 获取ADC数据:在ADC转换完成后,可以通过读取ADC寄存器来获取采样数据。
这些数据表示电机相电流的反电势。
6. 计算转速和位置:通过分析ADC数据,可以计算电机的转速和位置。
根据无感六步换相的原理,可以推断电机转子的位置。
通过以上步骤,就可以实现STM32的无感六步换相ADC反电势程序。
这个程序可以准确地测量电机的转速和位置,为电机控制提供重要的反馈信息。
同时,由于使用了STM32的强大功能和灵活配置选项,这个程序具有高效性和可扩展性。
STM32的无感六步换相ADC反电势程序是一种重要的电机控制策略。
通过测量电机相电流的反电势,可以准确地推断电机的转速和位置。
ADC0809模数转换器的使用详解与程序

值得一提的是,我按照上面电路,把 AD 的 ABC 三脚共同接接地时,AD0809088 始终输 出高电平,最后当我把 BC 共同接地,在程序中给 A 一个 0,则 AD0809 正常运行,有输出, 并且发现当所给的时钟频率越低, 最高精度的那位输出越稳定, 具体参数范围从芯片资料里 有详细介绍,不过十全英文,专业词汇哦。哈哈 现将程序记录如下: 完整的程序从这里下载: /ziliao/file/0809c51x.rar
ADC0809 模数转换器的使用详解与程序
带我们的王老师刚评上硕导了,下学期开始带研究生了。 从他那里了解到每做一次实验或者实践,应该把它用规范的格式记录下来,一来自己可以 日后查看,二来同学间可以相互交流,共通过进步,甚为必要。现将本次实验记录如下。
实验 名称:根据光强控制外围器件的通断。 实验原理;使用 AD 芯片将太阳能电池产生的光生伏打电压转化为数字信号,再通过单片 机处理后,在数码管上显示电压,同时根据设定电压伐值,控制外围器件的通断。 实验所需的设备:51 单片机烧写器一个,电脑一台,数字式示波器一个,数字式万用表一 个
// //
开始转换 关地址//等来自 eoc 变为 1//
打开输出
temp=P1; oe=0; //
//
取 p1 到 p3 关输出
temp=temp*50; temp=temp/256;
qian=temp/1000; bai=temp%1000/100; shi=temp%100/10; ge=temp%10;
编辑本段转换方法
模数转换器
模数转换过程包括量化和编码。量化是将模拟信号量程分成许多离散量级,并确定输 入信号所属的量级。编码是对每一量级分配唯一的数字码,并确定与输入信号相对应 的代码。最普通的码制是二进制,它有 2n 个量级( n 为位数) , 可依次逐个编号。模 数转换的方法很多,从转换原理来分可分为直接法和间接法两大类。 直接法是直接 将电压转换成数字量。它用数模网络输出的一套基准电压,从高位起逐位与被测电压 反复比较,直到二者达到或接近平衡(见图) 。控制逻辑能实现对分搜索的控制,其 比较方法如同天平称重。先使二进位制数的最高位 Dn-1 = 1 ,经数模转换后得到一个 整个量程一半的模拟电压 VS ,与输入电压 Vin 相比较,若 V in> VS , 则保留这一位;若 V in< V in ,则 Dn-1 = 0 。然后使下一位 Dn -2 = 1, 与上一次的结果一起经数模转换后与 V in 相比较 , 重复这一过程,直到使 D 0 = 1 ,再与 V in 相比较 , 由 V in> VS 还是 V in< V 来 决定是否保留这一位。经过 n 次比较后, n 位寄存器的状态即为转换后的数据。这种 直接逐位比较型(又称反馈比较型)转换器是一种高速的数模转换电路,转换精度很 高,但对干扰的抑制能力较差,常用提高数据放大器性能的方法来弥补。它在计算机
如何实现STM32F407单片机的ADC转换

如何实现STM32F407单片机的ADC转换用到的引脚是PA3也就是ADC1的通道31、ADC的主要参数a、分辨率----stm32f407的分辨率有6位、8位、10位、12位,参考电压如果是3.3 那么最小分辨率就是3.3/4095。
b、转换时间----stm32f407的最高允许频率是36M,最快转换时间= 3+12个周期=0.71us。
c、参考电压----2.4至3.3v。
2、工作过程分析ADC转换是把外面输入到引脚的电压值转换成数字信号,单片机里面有一个模拟至数字的转换模块,我们可以控制它采集引脚的电压,stm32F407可以利用void ADC_SoftwareStartConv(ADC_TypeDef* ADCx)这个函数来控制转换。
3、详细的步骤一、开启时钟设置端口IORCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//使能GPIOA时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);//使能ADC1时钟/*端口设置为模拟输入*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;/*模拟输入*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;/*通道3*/GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;/*-不带上下拉*/GPIO_Init(GPIOA,/*初始化*/上面主要是设置了GPIOA 和ADC1的时钟,并且把PA3设置为模拟输入。
二、设置通用控制寄存器ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled;/*DMA失能*/。
ADC0809进行AD转换
ADC0809进行A/D转换(C描述)2008-06-24 16:53指针:可对内存地址直接操作基于存贮器的指以贮器类为参量,它在编译时才被确定。
因此为指针选择存贮器的方法可以省掉,以这些指针的长度可为1个字节(idata *,data *,pdata *)或2个这节(code *,xdata *)。
char xdata *address;ADC0809具有8个模拟量输入通道,采用中断方式,在中断函数中读取8个通道的A/D转换值,分别存储在外部RAM的1000H~1007H单元。
ADC0809端口地址为00F0H。
程序定义了两个指针变量* ADC和* ADCdata,分别指向ADC0809端口地址(00F0H)和外部RAM单元地址(1000H~1007H)由*ADC=I送入通道数,启动ADC0809进行A/D转换,转换结束时产生INT1中断。
在中断服务函数int1()中通过temp=*ADC和*ADCdata=temp;读取A/D转换结果并存到外部RAM 中。
#include<reg51.h>unsigned int xdata *ADC; /*定义ADC0809端口指针*/unsigned int xdata *ADCdata; /*定义ADC0809数据缓冲器指针*/unsigned char I;void main( ){ADC=0x00f0; /*定义端口地址和数据缓冲器地址*/ADCdata=0x1000;I=8; /* ADC0809有8个模拟输入通道*/EA=1; EX1=1;IT1=1; /*开中断*/*ADC=I; /*启动ADC0809*/WHILE(I); /*等待8个通道A/D转换完*/}void int1() interrupt 2{unsigned char tmp;temp=*ADC; /*读取A/D转换结果*/*ADCdata=temp; /*结果值存到数据缓冲区*/ADCdata++; /*数据缓冲区地址加1*/i—;*ADC=I; /*启动下一个模拟输入通道A/D转换*/}除了用指针变量来实现对内存地址的直接操作外,c51编译器还提供一组宏,该宏定义文件为:“absacc.h”,利用它可十分方便地实现对任何内存空间的直接操作,改写上面的程序: #include<reg51.h>#include<absacc.h> /*包含绝对地址操作预定义头文件*/#define ADC 0x00f0; /*定义ADC0809端口地址*/#define ADCdata 0X1000 /*定义数据缓冲器地址*/unsigned char I;void main( ){I=8; / *ADC0809有8个模拟输入通道*/EA=1;ex1=1;it1=1; / *开中断*/XBYTE[ADC]=I; /*启动0809 */While(i); /*等待8个通道转换完毕*/}void int1() interrupt2 {unsigned char tmp;tmp=XBYTE[ADC]; /*读取A/D转换结果*/i--;XBYTE[ADCdata+I]=tmp; /**结果值存储到数据缓冲器*/XBYTE[ADC]=I; /*启动下一个模拟输入通道A/D转换*/}利用单片机AT89S51与ADC0809设计一个数字电压表(图)[ 来源:机电论文| 类别:技术| 时间:2009-2-24 10:47:12 ] [字体:大中小]1.实验任务利用单片机AT89S51与ADC0809设计一个数字电压表,能够测量0-5V之间的直流电压值,四位数码显示,但要求使用的元器件数目最少。
stm32f103c8t6使用adc转换的2路正负信号的程序计算相位差的方法和程序
stm32f103c8t6使用adc转换的2路正负信号的程序计算相位差的方法和程序在STM32F103C8T6上使用ADC转换器来测量两个正负信号的相位差,首先需要将两个信号分别连接到ADC的两个通道,然后对这两个信号进行连续的ADC转换。
接着,你可以通过比较这两个信号的幅度或时间差来计算相位差。
以下是一个简单的例子,说明如何实现这个过程。
这个例子假设你已经有了读取ADC值的函数(例如 `HAL_ADC_GetValue()`),并且信号已经经过了适当的处理(例如通过电阻网络进行偏置和归一化)。
```cinclude "stm32f1xx_"// 假设你已经初始化了ADC和其它相关硬件// ADC_HandleTypeDef hadc1;// 初始化代码...int16_t adc1_value = 0;int16_t adc2_value = 0;void ADC_IRQHandler(void){if ( == ADC1){if (HAL_ADC_IRQHandler(&hadc1) == HAL_OK){adc1_value = HAL_ADC_GetValue(&hadc1);adc2_value = HAL_ADC_GetValue(&hadc2); // 假设hadc2是第二个ADC的句柄}}}int main(void){HAL_Init();// 初始化代码...// 开始连续转换模式,并启用中断HAL_ADC_Start_DMA(&hadc1, (uint32_t)&adc1_value, 1);HAL_ADC_Start_DMA(&hadc2, (uint32_t)&adc2_value, 1);HAL_NVIC_SetPriority(ADC1_IRQn, 0, 0);HAL_NVIC_EnableIRQ(ADC1_IRQn); // 假设ADC1的中断优先级更高,首先启用它// 初始化代码...while (1){int phase_diff = calculate_phase_difference(adc1_value,adc2_value); // 根据你的应用来编写这个函数// 使用phase_diff做你想做的事...}}```在这个例子中,当ADC完成转换时,会触发一个中断,然后在中断服务程序中更新`adc1_value`和`adc2_value`。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
//
// Make sure the CPU clock speed is properly defined in
// DSP2833x_examples.h before compiling this example.
//
// Connect the signal to be converted to Channel A0.
//
// Original source by: S.S.
//
// $TI Release: 2833x/2823x Header Files V1.32 $
// $Release Date: June 28, 2010 $
//###########################################################################
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
#define BUF_SIZE 1024 // Sample buffer size
// Global variable for this example
Uint16 SampleTable[BUF_SIZE];
main()
{
Uint16 i;
Uint16 array_index;
// Step 1. Initialize System Control:
// 1 0 0 0 Jump to XINTF x32
// 0 1 1 1 Jump to OTP
// 0 1 1 0 Parallel GPIO I/O boot
// 0 1 0 1 Parallel XINTF boot
// 0 1 0 0 Jump to SARAM<- "boot to SARAM"
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
// Determine when the shift to right justify the data takes place
// Only one of these should be defined as 1.
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
// Enable the pin GPIO34 as output
EALLOW;
GpioCtrlRegs.GPBMUX1.bit.GPIO34 = 0; // GPIO pin
GpioCtrlRegs.GPBDIR.bit.GPIO34 = 1; // Output pin
EDIS;
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize the PIE control registers to their default state.
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
InitSysCtrl();
// Specific clock setting for this example:
// = 1/(3*40ns) =8.3MHz (for 150 MHz SYSCLKOUT)
// = 1/(3*80ns) =4.17MHz (for 100 MHz SYSCLKOUT)
// If Simultaneous mode enabled: Sample rate = 1/[(3+ACQ_PS)*ADC clock in ns]
// Boot_Table_End$
//
// DESCRIPTION:
//
// Channel A0 is converted forever and logged in a buffer (SampleTable)
// Using sequencer1 in sequencer override mode. Sequencer is Sequential mode
// The other two should be defined as 0.
#define POST_SHIFT 0 // Shift results after the entire sample table is full
#define INLINE_SHIFT 1 // Shift results as the data is taken from the results regsiter
// FILE: Example_2823xAdcSeq_ovdTest.c
//
// TITLE: DSP2823x ADC Seq Override mode Test.
//
// ASSUMPTIONS:
//
// This program requires the DSP2823x header files.
// TI File $Revision: /main/1 $
// Checkin $Date: May 27, 2009 13:04:17 $
//###########################################################################
//
// please refer to the documentation included with the eZdsp,
//
// $Boot_Table:
//
// GPIO87 GPIO86 GPIO85 GPIO84
// XA15 XA14 XA13 XA12
// PU PU PU PU
// ==========================================
InitPieVectTable();
// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2833x_InitPeripherals.c
// InitPeripherals(); // Not required for this example
// with sample rate of1/(3*40ns) =8.3MHz
//
// Open a memory window to SampletTable to observe the buffer
// RUN for a while and stop and see the table contents.
//
// As supplied, this project is configured for "boot to SARAM"
// operation. The 2823x Boot Mode table is shown below.
// For information on configuring the boot mode of an eZdsp,
InitAdc(); // For this example, init the ADC
// Specific ADC setup for this example:
AdcRegs.ADCTRL1.bit.ACQ_PS = ADC_SHCLK; // Sequential mode: Sample rate = 1/[(2+ACQ_PS)*ADC clock in ns]
#define ADC_SHCLK 0x1 // S/H width in ADC module periods = 2 ADC cycle
#define AVG 1000 // Average sample limit
#define ZOFFSET 0x00 // Average Zero offset
// 0 0 1 1 Branch to check boot mode
// 0 0 1 0 Boot to flash, bypass ADC cal
// 0 0 0 1 Boot to SA 0 0 0 Boot to SCI-A, bypass ADC cal
//
// Watch Variables:
// SampleTable - Log of converted values.