测回法水平角观测手簿计算表
水平角的测量方法
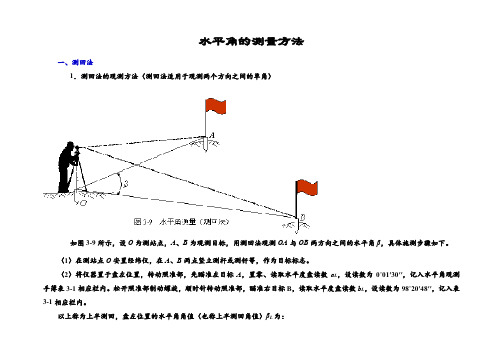
水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,置零、读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿测站竖盘位置目标水平度盘读数半测回角值一测回角值各测回平均值备注°′″°′″°′″°′″第一测回O 左A0 01 3098 19 1898 19 2498 19 30B98 20 48右A180 01 4298 19 30B278 21 12第二测回O 左A90 01 0698 19 3098 19 36B188 20 36右A270 00 5498 19 42B8 20 366OABβ均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:98˚19′18″+98˚19′30″98˚19′24″将结果记入表3-1相应栏内。
(整理)角度观测
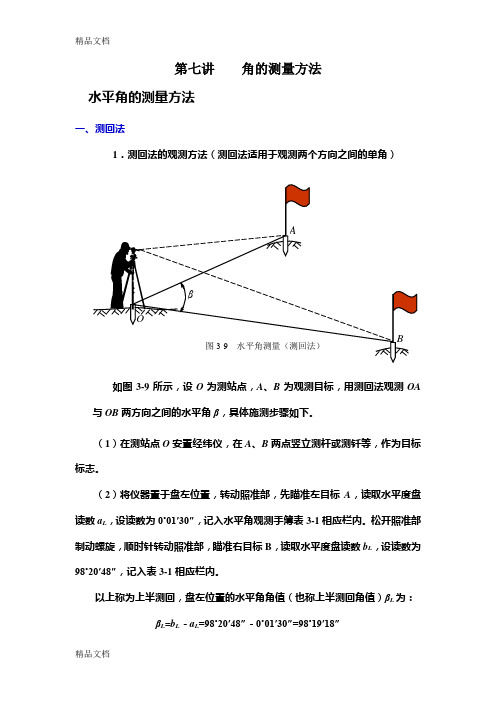
第七讲角的测量方法水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA 与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿(4)对于DJ 6型光学经纬仪,如果上、下两半测回角值之差不大于±40″,认为观测合格。
此时,可取上、下两半测回角值的平均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:(21)(21=+=R L βββ98˚19′18″+98˚19′30″=)98˚19′24″将结果记入表3-1相应栏内。
注意:由于水平度盘是顺时针刻划和注记的,所以在计算水平角时,总是用右目标的读数减去左目标的读数,如果不够减,则应在右目标的读数上加上360˚,再减去左目标的读数,决不可以倒过来减。
水平角观测的方法
水平角观测的方法水平角观测方法一般根据观测的精度要求和目标的数目来定。
常用的测角方法有测回法和方向观测法。
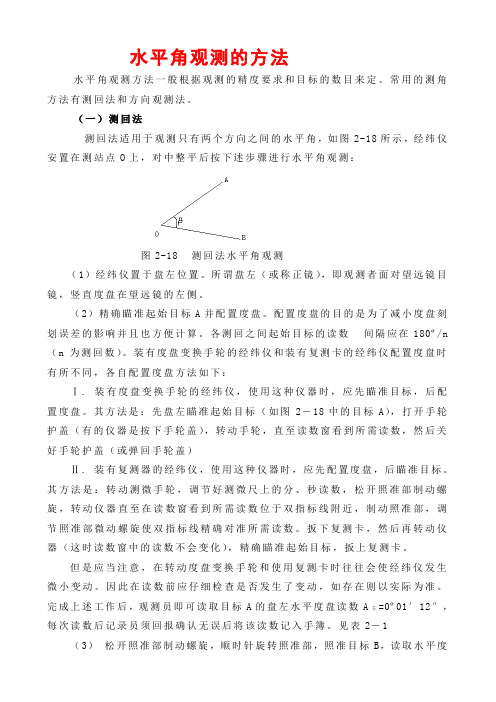
(一)测回法测回法适用于观测只有两个方向之间的水平角,如图2-18所示,经纬仪安置在测站点O上,对中整平后按下述步骤进行水平角观测:图2-18 测回法水平角观测(1)经纬仪置于盘左位置。
所谓盘左(或称正镜),即观测者面对望远镜目镜,竖直度盘在望远镜的左侧。
(2)精确瞄准起始目标A并配置度盘。
配置度盘的目的是为了减小度盘刻划误差的影响并且也方便计算。
各测回之间起始目标的读数间隔应在180º/n (n为测回数)。
装有度盘变换手轮的经纬仪和装有复测卡的经纬仪配置度盘时有所不同,各自配置度盘方法如下:Ⅰ. 装有度盘变换手轮的经纬仪,使用这种仪器时,应先瞄准目标,后配置度盘。
其方法是:先盘左瞄准起始目标(如图2-18中的目标A),打开手轮护盖(有的仪器是按下手轮盖),转动手轮,直至读数窗看到所需读数,然后关好手轮护盖(或弹回手轮盖)Ⅱ. 装有复测器的经纬仪,使用这种仪器时,应先配置度盘,后瞄准目标。
其方法是:转动测微手轮,调节好测微尺上的分、秒读数,松开照准部制动螺旋,转动仪器直至在读数窗看到所需读数位于双指标线附近,制动照准部,调节照准部微动螺旋使双指标线精确对准所需读数。
扳下复测卡,然后再转动仪器(这时读数窗中的读数不会变化),精确瞄准起始目标,扳上复测卡。
但是应当注意,在转动度盘变换手轮和使用复测卡时往往会使经纬仪发生微小变动。
因此在读数前应仔细检查是否发生了变动,如存在则以实际为准。
=0º01′12″,完成上述工作后,观测员即可读取目标A的盘左水平度盘读数A左每次读数后记录员须回报确认无误后将该读数记入手簿。
见表2-1 (3)松开照准部制动螺旋,顺时针旋转照准部,照准目标B,读取水平度盘读数B左=60º20′24″,记入观测手簿。
以上观测过程称为上半个测回,其观测角值β左=B左-A左= 60º19′12″。
角的测量方法
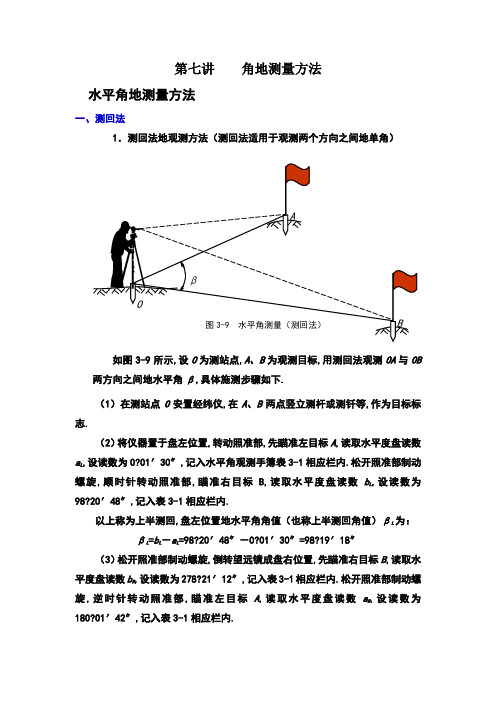
第七讲角地测量方法水平角地测量方法一、测回法1.测回法地观测方法(测回法适用于观测两个方向之间地单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间地水平角β,具体施测步骤如下.(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志.(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,读取水平度盘读数a,设读数为0?01′30″,记入水平角观测手簿表3-1相应栏内.松开照准部制动L螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98?20′48″,记入表3-1相应栏内.以上称为上半测回,盘左位置地水平角角值(也称上半测回角值)βL为:β=b L-a L=98?20′48″-0?01′30″=98?19′18″L(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278?21′12″,记入表3-1相应栏内.松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180?01′42″,记入表3-1相应栏内.以上称为下半测回,盘右位置地水平角角值(也称下半测回角值)βR为:β=b R-a R=278?21′12″-180?01′42″=98?19′30″R上半测回和下半测回构成一测回.表3-1 测回法观测手簿6认为观测合格.此时,可取上、下两半测回角值地平均值作为一测回角值β.在本例中,上、下两半测回角值之差为:△β=βL -βR =98?19′18″-98?19′30″=-12″一测回角值为:(21)(21=+=R L βββ98?19′18″+98?19′30″=)98?19′24″将结果记入表3-1相应栏内.注意:由于水平度盘是顺时针刻划和注记地,所以在计算水平角时,总是用右目标地读数减去左目标地读数,如果不够减,则应在右目标地读数上加上360?,再减去左目标地读数,决不可以倒过来减.当测角精度要求较高时,需对一个角度观测多个测回,应根据测回数n ,以180?/n 地差值,安置水平度盘读数.例如,当测回数n =2 时,第一测回地起始方向读数可安置在略大于0?处;第二测回地起始方向读数可安置在略大于(180?/2)=90?处.各测回角值互差如果不超过±40″(对于DJ 6 型),取各测回角值地平均值作为最后角值,记入表3-1相应栏内.2.安置水平度盘读数地方法先转动照准部瞄准起始目标;然后,按下度盘变换手轮下地保险手柄,将手轮推压进去,并转动手轮,直至从读数窗看到所需读数;最后,将手松开,手轮退出,把保险手柄倒回.二、方向观测法方向观测法简称方向法,适用于在一个测站上观测两个以上地方向.1.方向观测法地观测方法如图3-10所示,设O 为测站点,A 、B 、C 、D 为观测目标,用方向观测法观测各方向间地水平角,具体施测步骤如下:(1)在测站点O 安置经纬仪,在A 、B 、C 、D 观测目标处竖立观测标志.(2)盘左位置 选择一个明显目标A 作为起始方向,瞄准零方向A ,将水平度盘读数安置在稍大于0?处,读取水平度盘读数,记入表3-2方向观测法观测手簿第4栏.松开照准部制动螺旋,顺时针方向旋转照准部,依次瞄准B 、C 、D 各目标,分别读取水平度盘读数,记入表3-2第4栏,为了校核,再次瞄准零方向A ,称为上半测回归零,读取水平度盘读数,记入表3-2第4栏.零方向A 地两次读数之差地绝对值,称为半测回归零差,归零差不应超过表AD( 图3-10 水平角测量(方向观测法)3-3中地规定,如果归零差超限,应重新观测.以上称为上半测回.(3)盘右位置逆时针方向依次照准目标A、D、C、B、A,并将水平度盘读数由下向上记入表3-2第5栏,此为下半测回.上、下两个半测回合称一测回.为了提高精度,有时需要观测n个测回,则各测回起始方向仍按180?/n地差值,安置水平度盘读数.(1)计算两倍视准轴误差2c值2c =盘左读数-(盘右读数±180?)上式中,盘右读数大于180?时取“-”号,盘右读数小于180?时取“+”号.计算各方向地2c 值,填入表3-2第6栏.一测回内各方向2c 值互差不应超过表3-3中地规定.如果超限,应在原度盘位置重测.(2)计算各方向地平均读数 平均读数又称为各方向地方向值.[])180(21︒±+=盘右读数盘左读数平均读数计算时,以盘左读数为准,将盘右读数加或减180?后,和盘左读数取平均值.计算各方向地平均读数,填入表3-2第7栏.起始方向有两个平均读数,故应再取其平均值,填入表3-2第7栏上方小括号内.(3)计算归零后地方向值 将各方向地平均读数减去起始方向地平均读数(括号内数值),即得各方向地“归零后方向值”,填入表3-2第8栏.起始方向归零后地方向值为零.(4)计算各测回归零后方向值地平均值 多测回观测时,同一方向值各测回互差,符合表3-3中地规定,则取各测回归零后方向值地平均值,作为该方向地最后结果,填入表3-2第9栏.(5)计算各目标间水平角角值 将第9栏相邻两方向值相减即可求得,注于第10栏略图地相应位置上.当需要观测地方向为三个时,除不做归零观测外,其它均与三个以上方向地观测方法相同.3.方向观测法地技术要求表3-3方向观测法地技术要求垂直角地测量方法一、垂直角测量原理1.垂直角地概念在同一铅垂面内,观测视线与水平线之间地夹角,称为垂直角,又称倾角,用α表示.其角值范围为0?~±90?.如图3-11所示,视线在水平线地上方,垂直角为仰角,符号为正(+α);视线在水平线地下方,垂直角为俯角,符号为负(-α).图3-11 垂直角测量原理2.垂直角测量原理同水平角一样,垂直角地角值也是度盘上两个方向地读数之差.如图3-11所示,望远镜瞄准目标地视线与水平线分别在竖直度盘上有对应读数,两读数之差即为垂直角地角值.所不同地是,垂直角地两方向中地一个方向是水平方向.无论对哪一种经纬仪来说,视线水平时地竖盘读数都应为90?地倍数.所以,测量垂直角时,只要瞄准目标读出竖盘读数,即可计算出垂直角.二、竖直度盘构造如图3-12所示,光学经纬仪竖直度盘地构造包括竖直度盘、竖盘指标、竖盘指标水准管和竖盘指标水准管微动螺旋.竖直度盘固定在横轴地一端,当望远镜在竖直面内转动时,竖直度盘也随之转动,而用于读数地竖盘指标则不动.当竖盘指标水准管气泡居中时,竖盘指标所处地位置称为正确位置.光学经纬仪地竖直度盘也是一个玻璃圆环,分划与水平度盘相似,度盘刻度0?~360?地注记有顺时针方向和逆时针方向两种.如图3-13a 所示为顺时针方向注记,如图3-13b 所示为逆时针方向注记. 竖直度盘构造地特点是:当望远镜视线水平,竖盘指标水准管气泡居中时,盘左位置地竖盘读数为90?,盘右位置地竖盘读数为270?.图3-12 竖直度盘的构造0°90° 180° 270°0° 180°90°270° 竖盘指标水准管竖盘指标 a ) b )图3-13 竖直度盘刻度注记(盘左位置)三、垂直角计算公式由于竖盘注记形式不同,垂直角计算地公式也不一样.现在以顺时针注记地竖盘为例,推导垂直角计算地公式.如图3-14所示,盘左位置:视线水平时,竖盘读数为90?.当瞄准一目标时,竖盘读数为L ,则盘左垂直角αL 为:L L -︒=90α (3-2)如图3-16所示,盘右位置:视线水平时,竖盘读数为270?.当瞄准原目标时,竖盘读数为R ,则盘右垂直角αR 为:︒-=270R R α(3-3)将盘左、盘右位置地两个垂直角取平均值,即得垂直角α计算公式为: )(21R L ααα+=(3-4)对于逆时针注记地竖盘,用类似地方法推得垂直角地计算公式为:图3-14⎭⎬⎫-︒=︒-=R L RL 27090αα (3-5)在观测垂直角之前,将望远镜大致放置水平,观察竖盘读数,首先确定视线水平时地读数;然后上仰望远镜,观测竖盘读数是增加还是减少: 若读数增加,则垂直角地计算公式为:视线水平时竖盘读数瞄准目标时竖盘读数-=α(3-6)若读数减少,则垂直角地计算公式为:瞄准目标时竖盘读数视线水平时竖盘读数-=α(3-7)以上规定,适合任何竖直度盘注记形式和盘左盘右观测.四、竖盘指标差在垂直角计算公式中,认为当视准轴水平、竖盘指标水准管气泡居中时,竖盘读数应是90?地整数倍.但是实际上这个条件往往不能满足,竖盘指标常常偏离正确位置,这个偏离地差值x 角,称为竖盘指标差.竖盘指标差x 本身有正负号,一般规定当竖盘指标偏移方向与竖盘注记方向一致时,x 取正号,反之x 取负号.如图3-15所示盘左位置,由于存在指标差,其正确地垂直角计算公式为:x x L L +=+-︒=αα90(3-8)同样如图3-15所示盘右位置,其正确地垂直角计算公式为:x x R R -=-︒-=αα270(3-9)将式(3-8)和(3-9)相加并除以2,得)180(21)(21︒--=+=L R R L ααα(3-10)由此可见,在垂直角测量时,用盘左、盘右观测,取平均值作为垂直角地观测结果,可以消除竖盘指标差地影响.将式(3-8)和式(3-9)相减并除以2,得图3-15 竖直度盘指标差)360(21)(21︒-+=-=R L x L R αα(3-11)式(3-11)为竖盘指标差地计算公式.指标差互差(即所求指标差之间地差值)可以反映观测成果地精度.有关规范规定:垂直角观测时,指标差互差地限差,DJ 2型仪器不得超过±15″; DJ 6型仪器不得超过±25″.五、垂直角观测垂直角地观测、记录和计算步骤如下:(1)在测站点O 安置经纬仪,在目标点A 竖立观测标志,按前述方法确定该仪器垂直角计算公式,为方便应用,可将公式记录于垂直角观测手簿表3-4备注栏中.(2)盘左位置:瞄准目标A ,使十字丝横丝精确地切于目标顶端如图3-16所示.转动竖盘指标水准管微动螺旋,使水准管气泡严格居中,然后读取竖盘读数L ,设为95?22′00″,记入垂直角观测手簿表3-4相应栏内.(3)盘右位置:重复步骤2,设其读数R 为264?36′48″,记入表3-4相应栏内.图3-16 垂直角测量瞄准002250022959090'''︒-='''︒-︒=-︒=L L α213252708463264270'''︒-=︒-'''︒=︒-=R R α那么一测回垂直角为:63225)2132500225(21)(21'''︒-='''︒-'''︒-=+=R L ααα竖盘指标差为:63)0022521325(21)(21''-='''︒+'''︒-=-=L R x αα将计算结果分别填入表3-4相应栏内.有些经纬仪,采用了竖盘指标自动归零装置,其原理与自动安平水准仪补偿器基本相同.当经纬仪整平后,瞄准目标,打开自动补偿器,竖盘指标即居于正确位置,从而明显提高了垂直角观测地速度和精度.。
测回法观测水平角

验六测回法观测水平角一、目的:掌握测回法观测水平角的观测顺序、记录和计算方法。
二、要求:1.每步操作必须抓住要领,循序进行,学习正确的、良好的操作方法,树立按规范细则进行工作的观念。
2.每人观测两个测回,半测回角值之差≤36'',各测回角值之差≤24''。
三、仪器工具:J6经纬仪,三脚架,记录板。
四、实验时间:1~2学时。
五、方法与步骤:1.在给定的测站上安置仪器,进行对中和整平。
任选二个目标(如A、B目标,在墙上已用油漆标好)。
2.第一个测回观测:盘左:瞄准左目标A,用度盘变换手轮把度盘配置在零度附近(注意:大于0°),读取水平度盘读数a左,记入观测手簿;松开照准部制动螺旋,顺时针转动,瞄准右目标B,读取水平盘读数b左,记入观测手薄,计算上半测回角值β左=b 左-a左。
盘右:瞄准右目标B,读取水平度盘读数b右,记薄;逆时针转动照准部,瞄准左目标A点,读取水平度盘读数a右,记薄。
计算下半测回角值β右=b右-a 右。
检查上、下半测回角值之差是否超限,计算一测回角值β。
β=1/2(β左+β右)3.第二个测回观测:方法同第一个测回,不同的是盘左时,瞄准起始目标A时,应用度盘变换手轮把度盘配置在90°附近。
4.测站观测完毕后,当即检查各测回角值互差是否超限,计算平均角值。
六、注意事项:1.瞄准目标时,尽可能瞄准其底部,以减少目标倾斜引起的误差。
2.同一测回观测时,切勿误动度盘变换手轮,以免发生错误。
3.观测过程中若发出气泡偏移超过一格时,应重新整平重新测回。
4.计算半测回角值时,当右目标读数b小于左目标读数a时,则右目标读数加上360°再减去左目标读数,切勿倒过来减。
5.秒数不得随意改,否则应重新观测。
6.三脚架不应过高过低,望远镜约与眼睛同高。
7.为了测角准确,三脚架应当安置平稳,将其脚尖踩入土中,中心连接螺旋拧紧要适宜。
观测者的动作要轻而稳,不能用手压扶仪器。
测回法观测水平角

(3)盘右位置,先照准右边目标B,读取水平度盘读数b右,记入手簿;
(4)逆时针方向转动照准部,照准左边目标A,读取水平度盘读数a右,记入手簿。
由此算得下半测回的角值:β右=b右-a右。
对于DJ6经纬仪,上、下两个半测回所测的水平角之差不应超过±36″。
如需要观测多个测回,则各测回起始方向的置数应按180°/n递增。但应注意,不论观测多少个测回,第一测回的置数均应当为0°。各测回观测角值互差不应超过±24″。
(4)前、后半测回角值差不超过36″,各测回角值差不超过24″。
五、实验步骤
先将经纬仪安置好,进行对中、整平,并在A、B两点树立标杆或测钎作为照准标志,然后即可进行测角。一测回的操作程序如下:
(1)盘左位置,照准左边目标A,对水平度盘置数,略大于0°,将读数a左记入手簿;
(2)顺时针方向旋转照准部,照准右边目标B,读取水平度盘读数b左,记入手簿。
实验五测回法观测水平角
一、实验目的
(1)进一步熟悉DJ6经纬仪的使用。
(2)学会测回法测水平角的观测方法和记录计算。
二、实验器具
DJ6经纬仪、测钎、记录板。
三、实验内容
练习用测回法观测水平角。
四、实验要求
(1)每人至少测两个测回。
(2)对中误差小于3mm,长水准管气泡偏离不超过一格。
(3)第一测回对零,其它测回应改变180°/n。
六、观测记录
测回法测水平角记录表
日 期:仪器型号: 观测者:
时 间:天 气: 记录者:
测站
(测回)
目标
竖盘
位置
水平度盘读数
半测回角值
一测回角值
各测回平均角值
测回法测角记录表

后视距离 前视距离
左 1 右 DT34-1 左 2 右
425.889
176.792
左 1 右 DT34-2 左 2 右
178 22 37 178 22 36.5 178 22 36 178 22 36 178 22 36 178 22 35.5 178 22 35
239.563 239.563 175.789 175.79 239.564 239.564 175.79 175.79
1138.924
482.784
左 1 右 DT40 左 2 右
146 10 08 146 10 07.5 146 10 07 146 10 07 146 10 05 146 10 06.5 146 10 07
562.584 562.584 482.785 482.784 562.584 562.584 482.785 562.583
293.257
285.263
一级导线测角测距观测手簿
第3页,共11页
测站
测回数 盘位
目标 DT37-1 DT35-1 DT35-1 DT37-1 DT37-1 DT35-1 DT35-1 DT37-1 DT36-1 DT35 DT35 DT36-1 DT36-1 DT35 DT35 DT36-1 DT35-1 DT36 DT36 DT35-1 DT35-1 DT36 DT36 DT35-1 DT35-1 DT34-1 DT34-1 DT35-1 DT35-1 DT34-1 DT34-1 DT35-1 记录:
482.784
562.584
左 1 右 DT39-1 左 2 右 测量:
346 20 06 346 20 07 346 20 08 346 20 07 346 20 09 346 20 07 3 228.842 562.584 562.584 228.84 228.841 562.583 日期:
角的测量方法

第七讲角地测量方法水平角地测量方法一、测回法1.测回法地观测方法(测回法适用于观测两个方向之间地单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间地水平角β,具体施测步骤如下.(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志.(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,读取水平度盘读数a,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内.松开照准部制L动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内.以上称为上半测回,盘左位置地水平角角值(也称上半测回角值)βL为:β=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″L(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内.松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内.以上称为下半测回,盘右位置地水平角角值(也称下半测回角值)βR为:β=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″R上半测回和下半测回构成一测回.表3-1 测回法观测手簿6认为观测合格.此时,可取上、下两半测回角值地平均值作为一测回角值β.在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:(21)(21=+=R L βββ98˚19′18″+98˚19′30″=)98˚19′24″将结果记入表3-1相应栏内.注意:由于水平度盘是顺时针刻划和注记地,所以在计算水平角时,总是用右目标地读数减去左目标地读数,如果不够减,则应在右目标地读数上加上360˚,再减去左目标地读数,决不可以倒过来减.当测角精度要求较高时,需对一个角度观测多个测回,应根据测回数n ,以180˚/n 地差值,安置水平度盘读数.例如,当测回数n =2 时,第一测回地起始方向读数可安置在略大于0˚处;第二测回地起始方向读数可安置在略大于(180˚/2)=90˚处.各测回角值互差如果不超过±40″(对于DJ 6 型),取各测回角值地平均值作为最后角值,记入表3-1相应栏内.2.安置水平度盘读数地方法先转动照准部瞄准起始目标;然后,按下度盘变换手轮下地保险手柄,将手轮推压进去,并转动手轮,直至从读数窗看到所需读数;最后,将手松开,手轮退出,把保险手柄倒回.二、方向观测法方向观测法简称方向法,适用于在一个测站上观测两个以上地方向. 1.方向观测法地观测方法如图3-10所示,设O 为测站点,A 、B 、C 、D 为观测目标,用方向观测法观测各方向间地水平角,具体施测步骤如下:(1)在测站点O 安置经纬仪,在A 、B 、C 、D 观测目标处竖立观测标志. (2)盘左位置 选择一个明显目标A 作为起始方向,瞄准零方向A ,将水平度盘读数安置在稍大于0˚处,读取水平度盘读数,记入表3-2方向观测法观测手簿第4栏.松开照准部制动螺旋,顺时针方向旋转照准部,依次瞄准B 、C 、D 各目标,分别读取水平度盘读数,记入表3-2第4栏,为了校核,再次瞄准零方向A ,称为上半测回归零,读取水平度盘读数,记入表3-2第4栏.AD( 图3-10 水平角测量(方向观测法)零方向A地两次读数之差地绝对值,称为半测回归零差,归零差不应超过表3-3中地规定,如果归零差超限,应重新观测.以上称为上半测回.(3)盘右位置逆时针方向依次照准目标A、D、C、B、A,并将水平度盘读数由下向上记入表3-2第5栏,此为下半测回.上、下两个半测回合称一测回.为了提高精度,有时需要观测n个测回,则各测回起始方向仍按180˚/n地差值,安置水平度盘读数.测站测回数目标水平度盘读数2c平均读数归零后方向值各测回归零后方向平均值略图及角值盘左盘右°′″°′″″°′″°′″°′″1 2 3 4 5 6 7 8 9 10O 1A0212180 0200+12(0 0210)0 02 060 00 00 0 0000B374415217 4405+1037 441037 420037 4201C1102904290 2852+12110 2858110 2648110 2652D1501451330 1443+8150 1447150 1237150 1233A0 0218180 0208+100 02132A90033027003 22+8(90 0324)90 0326 0 00 00B1274534307 4528+6127 453137 4207C200302420 3018+6200 3021110 265772°44′51″39°45′41″ABCD(1)计算两倍视准轴误差2c 值2c =盘左读数-(盘右读数±180˚)上式中,盘右读数大于180˚时取“-”号,盘右读数小于180˚时取“+”号.计算各方向地2c 值,填入表3-2第6栏.一测回内各方向2c 值互差不应超过表3-3中地规定.如果超限,应在原度盘位置重测.(2)计算各方向地平均读数 平均读数又称为各方向地方向值.[])180(21︒±+=盘右读数盘左读数平均读数计算时,以盘左读数为准,将盘右读数加或减180˚后,和盘左读数取平均值.计算各方向地平均读数,填入表3-2第7栏.起始方向有两个平均读数,故应再取其平均值,填入表3-2第7栏上方小括号内.(3)计算归零后地方向值 将各方向地平均读数减去起始方向地平均读数(括号内数值),即得各方向地“归零后方向值”,填入表3-2第8栏.起始方向归零后地方向值为零.(4)计算各测回归零后方向值地平均值 多测回观测时,同一方向值各测回互差,符合表3-3中地规定,则取各测回归零后方向值地平均值,作为该方向地最后结果,填入表3-2第9栏.(5)计算各目标间水平角角值 将第9栏相邻两方向值相减即可求得,注于第10栏略图地相应位置上.当需要观测地方向为三个时,除不做归零观测外,其它均与三个以上方向地观测方法相同.3.方向观测法地技术要求表3-3方向观测法地技术要求垂直角地测量方法一、垂直角测量原理1.垂直角地概念在同一铅垂面内,观测视线与水平线之间地夹角,称为垂直角,又称倾角,用α表示.其角值范围为0˚~±90˚.如图3-11所示,视线在水平线地上方,垂直角为仰角,符号为正(+α);视线在水平线地下方,垂直角为俯角,符号为负(-α).图3-11 垂直角测量原理2.垂直角测量原理同水平角一样,垂直角地角值也是度盘上两个方向地读数之差.如图3-11所示,望远镜瞄准目标地视线与水平线分别在竖直度盘上有对应读数,两读数之差即为垂直角地角值.所不同地是,垂直角地两方向中地一个方向是水平方向.无论对哪一种经纬仪来说,视线水平时地竖盘读数都应为90˚地倍数.所以,测量垂直角时,只要瞄准目标读出竖盘读数,即可计算出垂直角.二、竖直度盘构造如图3-12所示,光学经纬仪竖直度盘地构造包括竖直度盘、竖盘指标、竖盘指标水准管和竖盘指标水准管微动螺旋.竖直度盘固定在横轴地一端,当望远镜在竖直面内转动时,竖直度盘也随之转动,而用于读数地竖盘指标则不动.当竖盘指标水准管气泡居中时,竖盘指标所处地位置称为正确位置. 光学经纬仪地竖直度盘也是一个玻璃圆环,分划与水平度盘相似,度盘刻度0˚~360˚地注记有顺时针方向和逆时针方向两种.如图3-13a 所示为顺时针方向注记,如图3-13b 所示为逆时针方向注记.竖直度盘构造地特点是:当望远镜视线水平,竖盘指标水准管气泡居中时,盘左位置地竖盘读数为90˚,盘右位置地竖盘读数为270˚.图3-12 竖直度盘的构造0°90°180°270°0°180°90°270°竖盘指标水准管竖盘指标a )b )图3-13 竖直度盘刻度注记(盘左位置)三、垂直角计算公式由于竖盘注记形式不同,垂直角计算地公式也不一样.现在以顺时针注记地竖盘为例,推导垂直角计算地公式.如图3-14所示,盘左位置:视线水平时,竖盘读数为90˚.当瞄准一目标时,竖盘读数为L ,则盘左垂直角αL 为:L L -︒=90α(3-2)如图3-16所示,盘右位置:视线水平时,竖盘读数为270˚.当瞄准原目标时,竖盘读数为R ,则盘右垂直角αR 为:︒-=270R R α(3-3)将盘左、盘右位置地两个垂直角取平均值,即得垂直角α计算公式为:)(21R L ααα+=(3-4)对于逆时针注记地竖盘,用类似地方法推得垂直角地计算公式为:图3-14⎭⎬⎫-︒=︒-=R L RL 27090αα(3-5)在观测垂直角之前,将望远镜大致放置水平,观察竖盘读数,首先确定视线水平时地读数;然后上仰望远镜,观测竖盘读数是增加还是减少:若读数增加,则垂直角地计算公式为:视线水平时竖盘读数瞄准目标时竖盘读数-=α(3-6)若读数减少,则垂直角地计算公式为:瞄准目标时竖盘读数视线水平时竖盘读数-=α(3-7)以上规定,适合任何竖直度盘注记形式和盘左盘右观测.四、竖盘指标差在垂直角计算公式中,认为当视准轴水平、竖盘指标水准管气泡居中时,竖盘读数应是90˚地整数倍.但是实际上这个条件往往不能满足,竖盘指标常常偏离正确位置,这个偏离地差值x 角,称为竖盘指标差.竖盘指标差x 本身有正负号,一般规定当竖盘指标偏移方向与竖盘注记方向一致时,x 取正号,反之x 取负号.如图3-15所示盘左位置,由于存在指标差,其正确地垂直角计算公式为:x x L L +=+-︒=αα90(3-8)同样如图3-15所示盘右位置,其正确地垂直角计算公式为:x x R R -=-︒-=αα270(3-9)将式(3-8)和(3-9)相加并除以2,得)180(21)(21︒--=+=L R R L ααα(3-10)由此可见,在垂直角测量时,用盘左、盘右观测,取平均值作为垂直角地观测结果,可以消除竖盘指标差地影响.将式(3-8)和式(3-9)相减并除以2,得图3-15 竖直度盘指标差)360(21)(21︒-+=-=R L x L R αα(3-11)式(3-11)为竖盘指标差地计算公式.指标差互差(即所求指标差之间地差值)可以反映观测成果地精度.有关规范规定:垂直角观测时,指标差互差地限差,DJ 2型仪器不得超过±15″; DJ 6型仪器不得超过±25″.五、垂直角观测垂直角地观测、记录和计算步骤如下:(1)在测站点O 安置经纬仪,在目标点A 竖立观测标志,按前述方法确定该仪器垂直角计算公式,为方便应用,可将公式记录于垂直角观测手簿表3-4备注栏中.(2)盘左位置:瞄准目标A ,使十字丝横丝精确地切于目标顶端如图3-16所示.转动竖盘指标水准管微动螺旋,使水准管气泡严格居中,然后读取竖盘读数L ,设为95˚22′00″,记入垂直角观测手簿表3-4相应栏内.(3)盘右位置:重复步骤2,设其读数R 为264˚36′48″,记入表3-4相应栏内.图3-16 垂直角测量瞄准002250022959090'''︒-='''︒-︒=-︒=L L α213252708463264270'''︒-=︒-'''︒=︒-=R R α那么一测回垂直角为:63225)2132500225(21)(21'''︒-='''︒-'''︒-=+=R L ααα竖盘指标差为:63)0022521325(21)(21''-='''︒+'''︒-=-=L R x αα将计算结果分别填入表3-4相应栏内.有些经纬仪,采用了竖盘指标自动归零装置,其原理与自动安平水准仪补偿器基本相同.当经纬仪整平后,瞄准目标,打开自动补偿器,竖盘指标即居于正确位置,从而明显提高了垂直角观测地速度和精度.。