重大研究计划视听觉信息的认知计算
车辆工程系列讲座有感
车辆工程系列讲座有感本学期学院为了开阔我们的视野,再次为我们即将毕业的学生开设了车辆工程专业系列讲座的课程。
一共由7位老师为我们带来了五大方面的启发课程。
其中有些知识是我从未了解过的,有些是已经了解过的,但是听了老师们的讲解后,还是有很深的启发。
下面我将主要从这五大方面简单谈谈我的收获。
在用车尾气排放检测:简易工况法——由刘昭度老师为我们讲解了我国在用车辆是如何进行尾气排放检测的,原来从未深入了解尾气排放检测的方法,听了刘老师的讲解还是对这方面的知识有了一定的了解。
我国汽车保有总量的大幅增长导致其排放污染物总量不断增加, 已成为破坏城市空气质量的主要因素。
因此我国必须有效地控制车辆排放,防止环境被严重污染。
有效控制机动车污染不仅要从新车开始控制好污染物的排放,满足新车排放法规要求,更重要的是要对在用车实行严格的排放检测制度,保证车辆排放长期处于正常状态。
简易工况法中,我国主要推行汽油车稳态加载加速模拟ASM法和柴油车加载减速Lugdown法。
该方法只有稳定的匀速过程, 加载保持固定值, 有两个等速工况段: 一是ASM5025 工况, 二是ASM2540 工况。
污染物分析仪器采用下列原理: CO、HC 和CO2采用不分光红外法( NDIR) , NO 和O2采用电化学法。
检测结果以浓度表示。
柴油车加载减速Lugd ow n 法对发现高排放的黑烟车很有效。
香港环保署首先于2000 年6 月颁布了修订后的柴油车加载减速L ugdow n法排放限值及测量方法, 先后控制了20000多辆黑烟车,十分有效地减少了道路上的柴油车颗粒物排放。
越野汽车悬架技术——陈思忠老师让我们了解到了越野车上所装备的各种先进的悬架技术。
认知计算和认知智能的研究进展
认知计算和认知智能的研究进展认知计算和认知智能是人类最为普遍、微观的智能,也是最接近机器人智能的一种智能。
认知计算与认知智能都是由人脑模型演化而来的,通过人类认知和思维的模拟,实现人工智能的发展。
自人工智能领域出现以来,人们在认知计算和认知智能方面的研究一直没有停歇。
实际上,正是因为这些研究的深入开展,才让人工智能有了今天的高速发展和被广泛应用的局面。
下面,我们将从认知计算和认知智能的研究进展方面进行探讨。
一、认知计算的研究进展认知计算是从人类认知的角度出发研究计算理论与方法的一种新兴学科。
它的基本思想是通过自然语言处理、知识表示和推理、学习等方式,将人类大脑的认知过程复制到计算机上。
1、自然语言处理自然语言处理是信息和语言学等多学科交叉的热门研究领域之一。
它的核心思想是模拟人类语言学能力的过程,即建立计算机系统并模拟人脑处理语言的过程。
为了实现这一目标,近年来,学者们开展了大量的自然语言处理技术研究和应用开发。
比如,基于深度学习的自然语言理解和生成机器人系统、面向智能客服的语音对话系统等,这些系统都是在认知计算方面的进一步推进和应用。
2、知识表示与推理知识表示和推理是认知计算的另一个研究重点,主要研究如何描述和处理人类知识的形式体系,并设计能够自动演绎和运用这些知识的推理系统。
比如,基于机器学习和逻辑推理的知识表示和自然语言形式化处理方法等,都是近年来认知计算领域的重要进展。
3、学习学习是认知计算领域内另一项重要的研究方向。
近年来,在计算机视觉、语音识别、自然语言处理、推荐系统等领域,机器学习得到了广泛应用。
未来,随着更多的数据和算法的发展,机器学习必将在认知计算和认知智能领域发挥更大的作用。
二、认知智能的研究进展认知智能是计算机在理解和应用人类认知的方面表现出来的一种能力。
目前,人们在认知智能领域的研究关注点包括视觉感知、语音处理和自然语言理解、人机交互等方面,下面具体展开讨论一下。
1、视觉感知视觉感知属于人体感知信息处理的一种方式,在计算机领域,研究者们通常采用图像处理和模式识别的方法,来解决计算机对图像的理解和识别问题。
2023年中考阅读理解-人类自动驾驶的百年情结
2023年中考阅读理解-人类自动驾驶的百年情结人类自动驾驶的百年情结①人类对于自动驾驶,有着百年之久的情结。
②早在1912年,出于战争的需要,美国科学家发明了一种用光电感光器件设计的能自动驶向光源的小车。
这辆小车取名叫“战争狗”,它能自动驶向敌营去引爆。
这是人类对自动驾驶最初的尝试。
1925年,美国工程师通过无线电装置对汽车进行遥控,使得一辆无人驾驶车可以通过远程控制进行前进、转向和刹车等操作。
1939年,在纽约世界博览会上,通用汽车展示了一辆能够通过铺设在道路下的电缆来进行自动驾驶的汽车,这辆车可以沿着规划好的路线自动行驶。
③到20世纪70年代末,人工智能开始引入自动驾驶的研究。
1979年,美国斯坦福大学设计了一辆依赖摄像头捕捉地面上的白线进行自动驾驶的汽车,这辆小车成功地穿越了一个放满椅子的房间。
20世纪80年代,美国卡内基梅隆大学研发了一种自动驾驶的货车。
1987年,德国慕尼黑联邦国防军大学也研发出一种自动驾驶汽车。
④1989年,中国开始了自动驾驶的研究。
2001年,西安交通大学组建了无人驾驶研究的课题组,并于2003年研制出“思源1号”自动驾驶汽车,这辆自动驾驶汽车能以每小时10公里—15公里的速度在校园内进行自主行驶。
当时,课题组制订了一个雄心勃勃的计划,要让这辆车走出校门,从西安行驶到敦煌。
但是,这辆车开出校园后几乎寸步难行,因为真实的交通场景远比校园里进行的道路测试要复杂多变,□□,在大多数的场合与环境下,这辆车都需要经过人工干预。
只有在沙漠地带的公路上才能平稳地行驶。
这是一次不成功的挑战,□□给我们带来了对所存在问题深刻思考和应对挑战的决心。
⑤2008年,国家自然科学基金委启动了“视听觉信息的认知计算”重大研究计划。
为了验证实验室的研究成果,2009年国家自然科学基金委举办了中国智能车未来挑战赛。
从2009年到2020年,挑战赛已经成功举办了12届,现在很多企业从事自动驾驶的骨干人员中有不少人都参加过中国智能车未来挑战赛,我们称这个挑战赛是“中国自动驾驶技术研究的摇篮”。
认知计算技术的最新研究成果

认知计算技术的最新研究成果引言认知计算技术是指模拟人类智能的各种计算方法和相关技术的总称,是目前计算技术领域的重要研究方向。
近年来,随着深度学习、神经网络等技术的快速发展,认知计算技术也取得了许多重要的进展。
本文将介绍认知计算技术的最新研究成果,分为自然语言处理、图像识别、语音识别和智能计算四个方面进行讲解。
自然语言处理自然语言处理是指使用计算机对自然语言进行处理和分析的技术,是人工智能领域的重要分支。
最近,自然语言处理领域发生了一些重要进展,其中最热门的是BERT(Bidirectional Encoder Representations from Transformers)模型。
BERT模型是2018年谷歌发布的一种预训练语言表示模型,采用Transformer网络结构,使得模型在处理自然语言时能够更好地把握上下文信息,并且能够快速适应各种任务。
BERT模型在多项自然语言处理任务中取得了优异的表现,如问答系统、文本分类、命名实体识别等。
图像识别图像识别是指对图像进行智能分析和理解的过程,属于计算机视觉领域的核心技术。
最近,图像识别领域也取得了很多成果,其中最热门的是目标检测技术。
目标检测是指在图像中找到指定目标的位置和边界框,在实际应用中广泛应用于人脸识别、目标跟踪等领域。
当前,最先进的目标检测技术是基于深度学习的方法,如Faster R-CNN、YOLO等。
这些方法采用卷积神经网络对输入的图像进行特征提取,然后根据提取的特征来定位目标。
语音识别语音识别是将人类语音转换成对应文本的过程,是人机交互的重要方式。
最近,语音识别领域的研究也取得了许多进展,其中最值得关注的是基于深度神经网络的端到端语音识别方法。
传统的语音识别方法大多采用多个模块组合的方式,这些模块包括特征提取、声学模型和语言模型等,每个模块的输出都是之后模块的输入。
而端到端语音识别方法则直接将语音信号作为输入,输出对应的文本结果,避免中间环节对结果的干扰。
国家自然科学基金委员会重大研究计划“视听觉信息的认知 …
国家自然科学基金委员会重大研究计划“视听觉信息的认知计算”2013年“无人驾驶智能车暑期学校”主办:重大研究计划指导专家组承办:西安交通大学、中国科学院合肥物质科学研究院一、教学目的无人驾驶车辆涉及认知科学、人工智能、机器人技术、传感技术与车辆工程等多个学科,它既包括理论方法与关键技术的突破,也涉及到大量的工程与试验问题,其研究意义不仅体现在所包含的核心科学问题上,同时又体现在重大应用前景与战略价值上。
近年来,世界主要发达国家均将无人驾驶车辆的研发作为探索认知科学、突破人工智能技术,发展智能汽车产业的重要途径。
国家自然科学基金委员会于2008年启动了重大研究计划“视听觉信息的认知计算”,连续5年相继资助了73个相关项目,在“感知特征提取、表达与整合”、“感知数据的机器学习与理解”和“多模态信息协同计算”等核心科学问题上取得了一系列重要进展,并以自然环境感知与智能行为决策能力的无人驾驶车辆作为验证平台。
同时,国(Future 家自然科学基金委员会于2009年起已连续4年组织了“中国智能车未来挑战赛”Challenge),先后有国内20余个单位、近20个车队参与了比赛。
该赛事不仅有效地交流和验证我国“视听觉信息的认知计算”研究成果,促进了该重大研究计划顺利开展,也有力地推动了我国无人驾驶智能车辆相关领域的技术创新和发展。
目前,我国无人驾驶智能车辆的研究研究水平迅速提高,已经形成了具有一定规模的视听觉认知与无人驾驶车辆研究群体,并得到了国内外的广泛关注。
为了进一步加强研究团队间的学术交流与合作,促进研究水平的整体提高,并带动更多研究团队加入我国无人驾驶智能车辆的研究群体,国家自然科学基金委员会重大研究计划“视听觉信息的认知计算”指导专家组拟组织2013年“无人驾驶智能车暑期学校”,就无人驾驶智能车辆的感知与认知、智能决策、控制与执行、系统集成、测试与评估等各方面的理论方法、关键技术开展全面深入的学习、交流与研讨。
计算认知神经科学的研究及应用

计算认知神经科学的研究及应用一、绪论计算认知神经科学是深入研究人类认知和神经系统运作的一门学科,涉及计算机科学、神经科学和心理学等多个领域,近年来备受关注。
本文将从研究角度、应用角度两方面进行探讨。
二、研究方向1. 神经计算建模神经计算模型是利用计算机技术对人类神经系统进行模拟或仿真的一种方法。
通过神经计算模型,研究者可以重建人类大脑的微观结构和网络结构,从而深入研究人类大脑的认知机制。
最典型的神经计算模型是人工神经网络(Artificial Neural Network, ANN),该模型可以对收集到的神经科学数据进行分析和建模,推测出大脑各个区域的功能和表现。
2. 广义线性模型(Generalized Linear Models, GLM)广义线性模型是一种复杂的神经信号分析方法,是计算认知神经科学的重要研究方向之一。
它可以同时考虑神经信号的时间和空间特性,分析神经元的电活动信号与行为表现的关系。
3. 脑成像技术脑成像技术是计算认知神经科学的核心研究手段之一。
近年来,功能磁共振成像(Functional Magnetic Resonance Imaging, fMRI)和磁脑电图成像(Magnetoencephalography, MEG)成为了非侵入式成像技术的主要代表,可在现实环境下测量人体大脑的神经活动。
通过这些技术,研究人员可以捕捉到大脑的整体和局部功能模式,为认知控制研究提供了更全面的数据。
三、应用方向1. 神经假肢神经假肢是利用神经科学和计算机技术开发出来的一种假肢。
通过将电极植入神经或肌肉组织中,感知人体的意图并转换成机械运动信号,从而控制假肢进行相应的动作。
神经假肢的研究为残疾人提供了改善生活质量的重要途径。
2. 智能辅助康复训练计算认知神经科学可以为康复训练提供智能化支持和指导。
智能辅助康复训练系统可以利用计算机技术结合脑机接口技术,收集人体生理参数信息并进行处理分析,制定个性化的康复训练方案和中长期康复规划,促进患者康复治疗效果提高。
认知计算及其应用研究
认知计算及其应用研究近年来,随着计算机技术的发展和人工智能的兴起,认知计算成为了一个备受关注的研究领域。
认知计算是指将人类认知和计算机技术相结合,实现人机交互和智能决策的能力。
它旨在将人类的主观认知与客观计算相结合,用计算机对大量、复杂、模糊的信息进行处理和理解,以帮助人们更好地解决实际问题。
本文将对认知计算及其应用研究进行探讨。
一、认知计算的理论基础1. 认知科学认知计算的理论基础主要来自于认知科学。
认知科学是研究人类认知和心理活动的一门学科,其核心是人类的信息处理机制。
认知科学的研究对象包括:感知、记忆、学习、推理、问题解决、决策等各种心理活动。
通过对这些心理活动的研究,认知科学可以揭示人类大脑的信息处理机制,为认知计算提供理论基础。
2. 计算机科学认知计算的另一个理论基础是计算机科学。
计算机科学是研究计算机的设计、开发、应用以及计算原理和算法的学科。
计算机科学提供了计算机基本原理、计算机网络、人工智能、数据结构、操作系统等重要的技术支持,为认知计算的研究提供了相应的技术保障。
二、认知计算的应用1. 聊天机器人聊天机器人是一种基于人工智能和自然语言处理技术的应用,能够与人类进行自然、直接、高效的交流。
聊天机器人已经广泛应用于智能客服、在线咨询、家庭智能助理等领域。
通过模拟人类的语言和思维模式,聊天机器人可以实现语义理解、情感分析、知识推理等功能,为人类提供便利的交流方式。
2. 智能推荐智能推荐是指通过计算机分析用户的兴趣、喜好和行为,提供个性化的推荐服务。
智能推荐已经成为了电商、社交网络、新闻媒体等领域中的重要应用。
通过建立用户兴趣模型、物品特征模型和推荐算法,智能推荐可以实现精准的推荐服务,提高用户的满意度和购物体验。
3. 智能辅助决策智能辅助决策是指通过计算机对大量数据进行智能分析和决策支持,提供高效、准确、可靠的信息决策服务。
智能辅助决策已经成为了企业、政府和军事领域中的重要应用。
通过建立数据分析模型、可视化分析工具和预测算法,智能辅助决策可以帮助用户快速、准确的获取决策所需的关键信息,提高决策的效率和质量。
五、自然科学基础研究计划
五、自然科学基础研究计划(一)项目类别与申报要求2014年省自然科学基础研究计划设重点项目、青年人才项目、面上项目三类。
1.重点项目重点项目以应用基础研究为主,围绕本省经济社会发展的重点开展研究。
申请项目需具备充分的预研积累和良好的实验条件,一般应以省部级以上重点实验室为依托。
申请者应具有副高级以上专业技术职务,截止2014年1月1日年龄一般不超过55周岁。
研究期限一般为3年。
2.青年人才项目青年人才项目旨在促进青年科研人才的成长,培养一批优秀青年创新人才。
申请项目一般应是经单位资助培育的青年优秀人才主持的创新研究项目。
申请人截止2014年1月1日男性年龄在35周岁以下、女性年龄在40周岁以下,并已获得博士学位。
研究期限一般为2年。
3.面上项目面上项目旨在促进学科发展,激励原始创新研究。
申请人一般应具有副高级以上专业技术职务或已获得博士学位(具有中级专业技术职务但未获得博士学位者,须有两名具有正高职称的同行专家推荐)。
研究期限一般为2年,申请者年龄以保证在退休前按计划时间完成项目研究任务,办理结题手续为限。
(二)重点支持的研究方向1.装备制造领域装备模块化制造关键理论研究;装备数字化应用基础研究;有明显应用背景的机器人系统设计与制造技术研究;大飞机技术理论研究;新型激光器制造及应用关键理论与技术研究;太阳能光伏光电及半导体照明系统设计理论研究;资源开采、综合利用、环保装备设计理论及关键技术研究;其他相关基础问题研究。
2.能源化工领域节能减排新技术理论研究;化石能源高效洁净转化利用的物理化学基础问题研究;陕北煤、油、气的科学开采及综合高效利用研究;非常规油气资源(煤层气、油页岩、页岩气)有效利用关键技术研究;CO2高效分离捕集及资源化转化利用新技术理论研究;废弃物利用理论研究;“绿色”化学与清洁生产方法中的基础科学问题研究;新型/绿色催化剂设计、装备基础问题研究;纳米分析、芯片分析化学研究;其他相关基础问题研究。
重点研发计划项目指南
重点研发计划项目指南1.复杂场景感知的人工智能自适应计算机理与技术面向全时多域复杂场景智能感知领域,重点支持开展多源数据深度交互与融合技术研究、自适应视频增强与模型迁移技术研究、特定芯片或硬件加速技术研究、自适应学习路径优化技术研究,研制基于不同场景的智能感知芯片和感知设备。
2.基于大模型的跨模态知识图谱构建方法研究支持文本、图像及视频等多模态数据的知识抽取大模型预训练方法,研究基于大模型的多模态知识图谱嵌入与表示学习、基于大模型的多模态小样本学习、复杂场景下视觉知识抽取与转换等关键技术,实现细粒度多模态视觉特征和文本特征对齐,构建跨模态知识图谱。
3.类脑计算与脑机智能技术及应用研究新型无创脑机接口技术和柔性脑机接口技术,设计实现基于神经可塑性的脉冲网络模型与算法,研究面向类脑芯片的深度增强学习方法,设计实现仿生智能无人系统,研究高可信类脑听觉前端模型与系统,推动脑科学与类脑研究及应用水平。
4.基于深度学习的复杂工业场景高性能控制研究系统辨识与自适应深度学习相结合的端边云协同控制过程数字孪生模型,研发基于强化学习的在线自适应与自主控制器整定智能算法。
基于数字孪生模型,设计实现工业互联网的端边云协同平台及可编程逻辑控制系统的控制器参数整定架构和系统,并在矿业冶金等复杂流程工业过程领域应用验证。
5.装备制造系统质量解析与优化设计仿真平台针对高端装备制造,研究基于人工智能的产品设计、产品质量协同优化、多阶段质量解析等关键技术,研究多源数据感知及设备运行状态解析技术,设计实现装备制造系统质量解析与优化设计仿真平台并部署应用,解决高端装备制造全生命周期产品质量一致性与稳定性难题。
6.基于大模型的化工工艺自主设计与优化研究化工领域的多源异构数据处理技术,设计化工流程设计图的向量表示及嵌入技术,研究多模态化工领域专业大模型的预训练、优化及部署方法,构建化工领域的多模态大模型,基于多模态化工领域专业大模型,开发具有自主知识产权、稳定可靠的化工工艺智能设计与优化系统,突破结构化工艺设计、仿真与优化等技术,实现工艺快速自动生成。
重大研究计划视听觉信息的认知计算
附件2:重大研究计划“视听觉信息的认知计算”2008年度项目指南与人类视听觉感知密切相关的图像、语音和文本(语言)信息在社会、经济和国家安全等领域中扮演着重要角色,并在今后一段时间内仍将迅猛增长。
这类信息可被人类直接感知和理解,也可用计算机进行处理,但计算机的处理能力远逊于人类且处理效率远不能满足当今社会的发展需求。
如何借鉴人类的认知机理和相关数学的最新研究成果,建立新的计算模型和方法,从而大幅度提高计算机对这类信息的理解能力与处理效率,不仅可有力推动信息科学的快速发展,也将为国民经济和社会发展做出重大贡献。
一、科学目标本重大研究计划的总体科学目标是:围绕国家重大需求,充分发挥信息科学、生命科学和数理科学的交叉优势,从人类的视听觉认知机理出发,研究并构建新的计算模型与计算方法,提高计算机对非结构化视听觉感知信息的理解能力和海量异构信息的处理效率,克服图像、语音和文本(语言)信息处理所面临的瓶颈困难,为确保国家安全与公共安全、推动信息服务及相关产业发展以及提高国民生活和健康水平做出重要贡献。
具体表现为:在视听觉信息处理的基础理论研究方面取得重要进展;在视听觉信息协同计算、自然语言(汉语)理解以及与视听觉认知相关的脑―机接口等三项关键技术方面取得重大突破;集成上述相关研究成果,研制具有自然环境感知与智能行为决策能力的无人驾驶车辆验证平台,主要性能指标达到世界先进水平,从而提升我国在视听觉信息处理领域的整体研究实力,培养具有国际影响力的优秀人才与团队,为国家安全和社会发展提供相关研究环境与技术支撑。
二、核心科学问题本重大研究计划将围绕“感知特征提取、表达与整合”、“感知数据的机器学习与理解”和“多模态信息协同计算”等核心科学问题,组织并实施如下四个主要方面的研究工作。
(一)图像与视觉信息计算。
主要研究图像与视觉信息计算的认知机理,视觉基本特征的提取与选择,物体识别与图像内容理解,复杂场景下运动目标的行为分析等。
基于云模型的粒计算方法研究

第6章从云模型理解模糊集合的争论与发展第1章基于云模型的粒计算方法应用云模型是一个定性定量转换的双向认知模型,正向高斯云和逆向高斯云算法实现了一个基本概念与数据集合之间的转换关系;本文基于云模型和高斯变换提出的高斯云变换方法给出了一个通用的认知工具,不仅将数据集合转换为不同粒度的概念,而且可以实现不同粒度概念之间的柔性切换,构建泛概念树,解决了粒计算中的变粒度问题,有着广阔的应用前景。
视觉是人类最重要的感觉,人类所感知的外界信息至少有80%以上都来自于视觉[130]。
图像分割[131]是一种最基本的计算机视觉技术,是图像分析与理解的基础,一直以来都受到人们的广泛关注。
目前图像的分割算法有很多,包括大大小小的改进算法在内不下千种,但大致可以归纳为两类[132]。
第一类是采用自顶向下的方式,从数学模型的选择入手,依靠先验知识假定图像中的部分属性特征符合某一模型,例如马尔科夫随机场、引力场等,利用模型描述图像的邻域相关关系,将图像低层的原始属性转换到高层的模型特征空间,进而建模优化求解所采用模型的参数,通常是一个复杂度非常高的非线性能量优化问题。
在特征空间对图像建模,其描述具有结构性、分割结果也一般具有语义特征,但是由于对数据的未知性、缺乏足够先验知识的指导,导致模型的参数选择存在一定的困难。
第二类是采用自底向上的方式,从底层原始数据入手,针对图像灰度、颜色等属性采用数据聚类的方法进行图像分割,聚类所采用的理论方法通常包括高斯变换、模糊集、粗糙集等;或者预先假设图像的统计特性符合一定的分类准则,通过优化准则产生分割结果,例如Otsu方法的最大方差准则[133][134]、Kapur方法的最大熵准则[135][136]等。
这类方法虽然缺乏语义信息表达,但是直接在数据空间建模,方法更具普适性和鲁棒性。
随着计算机视觉研究的深入,简单的图像分割已经不能满足个性化的需求,有时候人们恰恰兴趣的是图像中亦此亦彼的那些不确定性区域,基于云模型的粒计算方法是一种不确定性计算方法,发现图像中存在的不确定性区域是它的一个重要能力。
孙富春简介pdf

孙富春简介pdf孙富春简历孙富春,清华大学计算机科学与技术系教授,博士生导师,国家863计划专家组成员,国家自然基金委重大研究计划“视听觉信息的认知计算”指导专家组成员,计算机科学与技术系学术委员会副主任, 智能技术与系统国家重点实验室常务副主任; 兼任国际刊物《IEEE Trans. on Fuzzy Systems》,《Mechatronics》和《International Journal of Control, Automation, and Systems》副主编或大区主编,《International Journal of Computational Intelligence Systems》和《Robotics and Autonumous Systems》编委;兼任国内刊物《中国科学F:信息科学》和《自动化学报》编委;兼任中国人工智能学会认知系统与信息处理专业委员会主任,IEEE CSS智能控制技术委员会委员。
98年3月在清华大学计算机应用专业获博士学位。
98年1月至2000年1月在清华大学自动化系从事博士后研究,2000年至今在计算机科学与技术系工作。
工作期间获得的主要奖励有:2000年全国优秀博士论文奖,2001年国家863计划十五年先进个人,2002年清华大学“学术新人奖”,2003年韩国第十八届Choon-Gang 国际学术奖一等奖第一名,2004年教育部新世纪人才奖,2005年清华大学校先进个人,2006年国家杰出青年基金。
获奖成果5项,两项分别获2010年教育部自然科学奖二等奖(排名第一)和2004年度北京市科学技术奖(理论类)二等奖(排名第一)、一项获2002年度教育部提名国家科技进步二等奖(排名第二)、三项获省部级科技进步三等奖。
译书一部,专著两部,在国内外重要刊物发表或录用论文150余篇,其中在IEE、IEEE汇刊、Automatica等国际重要刊物发表论文90余篇,80余篇论文收入SCI,SCI期刊他人引用700余次,200多篇论文收入EI,有两篇论文曾被评为国内二级学会的最佳优秀论文奖。
【论文资料】无人驾驶汽车国内外研究概况
无人驾驶汽车国内外研究概况无人驾驶车辆,又称为无人车、自主车、智能车辆、室外轮式移动机器人等,涉及认知科学、人工智能、机器人技术与车辆工程等交叉学科,是各种新兴技术的综合试验床与理想载体,也是当今前沿科技的重要发展方向。
它既包括理论方法与关键技术的突破,也涉及到大量的工程与试验问题,其重大研究意义不仅体现在所包含的核心科学问题上,同时又反映在其重大应用前景与战略价值上,社会关注度极高。
从二十世纪的50年代起,美英德等西方国家已经开始了无人驾驶汽车的研究工作,并且在无人车的控制和商用化方面取得了一定的进展。
在汽车工业非常发达的德国,各大汽车公司都资助或联合了高等院校以开发可在普通道路上行驶的无人车。
目前,欧盟已经开启了一个名为CyberCars的无人车项目,以推动无人车的研究和各国间的信息共享。
在二十世纪的80年代,我国部分大学开始了无人驾驶汽车的研究工作,但是虽然起步较晚且投入不足,但也取到了一定的成果。
目前从事这方面研究工作的主要是国防科技大学、军事交通学院以及清华大学等科研院所。
1 国外无人驾驶车辆研究现状1.1 美国美国于上世纪50年代开始对无人驾驶车辆进行研究,在1980年左右其技术得到高速发展。
上世纪八十年代,美国陆军开始与国防高级研究计划局(DARPA)进行合作,开展了自主地面车辆(A VL)项目。
1995年由卡耐基梅隆大学研制的Navlab-V智能车,完成了横穿美国东西部的无人驾驶试验。
美国国防部门在上世纪九十年代末开始进行DEMO系列无人驾驶车辆的研制,总共研制出了十代DEMO无人车。
从2004年开始到2007年,美国国防高级研究计划局(DARPA)举办了3次无人驾驶车辆比赛,主要为了考察在复杂环境下无人驾驶车辆的自主行驶能力。
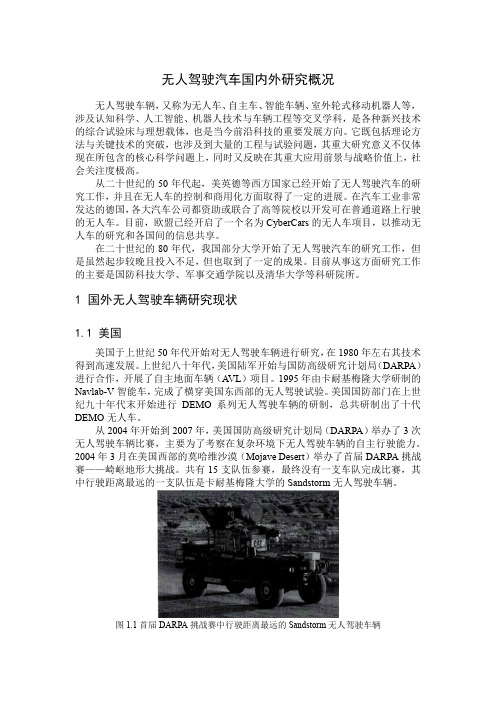
2004年3月在美国西部的莫哈维沙漠(Mojave Desert)举办了首届DARPA挑战赛——崎岖地形大挑战。
共有15支队伍参赛,最终没有一支车队完成比赛,其中行驶距离最远的一支队伍是卡耐基梅隆大学的Sandstorm无人驾驶车辆。
视听觉信息的认知计算重大研究计划
视听觉信息的认知计算重大研究计划2013年度项目指南本重大研究计划以社会、经济和国家安全等领域中与人类视听觉信息相关的图像、语音和文本(语言)的认知机制和计算模型为研究对象,以提高计算机对这类复杂感知信息的理解能力和对海量异构信息的处理效率为主要目标,实现相关技术的突破和信息处理方式的改变,为满足社会与国民经济发展以及国家安全等方面的重大需求做出贡献。
一、科学目标围绕国家重大需求,充分发挥信息科学、生命科学和数理科学的交叉优势,从人的视听觉认知机理出发,研究和构建新的计算模型与计算方法,提高计算机对视听觉感知信息的理解能力和非结构化海量信息的处理效率,为推动信息服务及相关产业发展、提高国民生活和健康水平和确保国家安全与公共安全做出重要贡献。
具体表现为:在视听觉信息处理的基础理论研究方面取得重要进展;在视听觉信息计算以及与视听觉认知相关的脑-机接口等关键技术方面取得重大突破;集成上述主要研究成果,研制具有自然环境感知与智能行为决策能力的无人驾驶车辆验证平台,主要性能指标达到世界先进水平;培养具有国际影响力的优秀人才与团队,为社会发展和国家安全提供相关研究环境与技术支撑。
二、2013年度重点资助领域和研究方向本重大研究计划自2008年启动至今已资助“重点支持项目”20项、“培育项目”53项和集成项目1项(有关信息参见/)。
目前,重大研究计划“视听觉信息的认知计算”已进入集成升华关键阶段,为了顺利实现本重大研究计划的总体科学目标,2013年度重点研究和支持如下两个领域:(一)基于视听觉认知机理的无人驾驶车辆与行驶环境理解。
针对无人驾驶车辆行驶需求,研究生物视听觉信息处理不同阶段的认知机理和计算模型:包括视听觉信息早期处理(视听觉信息预处理与增强)、中期处理(降维、特征选择与提取)和后期处理(分类、识别与理解)等不同阶段的认知机理与可计算模型。
1.基于视听觉认知机理的无人驾驶车辆。
资助集成项目1项,资助期限3年,资助经费约1100万。
中国科学信息科学 多模态认知计算
我国科学信息科学多模态认知计算一、背景介绍科学信息科学是一门旨在研究信息的获取、存储、处理和传递的学科,它涉及到信息科学、计算机科学、认知科学等多个学科的交叉领域。
随着科技的发展和社会的进步,信息量不断增加,信息形式也变得越来越多样化,这给科学信息科学的研究带来了新的挑战和机遇。
二、多模态认知计算的基本概念多模态认知计算是科学信息科学领域的一个重要研究方向,它主要研究如何实现对多种信息形式的认知和计算。
传统的信息处理方法基本上是基于文本或数字的,但现实生活中,人们接触到的信息形式是多种多样的,比如图像、视瓶、声音等。
多模态认知计算就是要研究如何使计算机能够理解和处理这些多种信息形式,以实现更加智能化的信息处理和应用。
三、多模态认知计算的研究内容1. 多模态数据融合多模态数据融合是多模态认知计算研究的基础和关键。
不同形式的信息数据之间存在着复杂的通联和相互影响,如何将这些数据有效地融合起来,是一个具有挑战性的问题。
多模态数据融合涉及到数据的表示、融合策略的选择、融合算法的设计等多个方面,是多模态认知计算研究的核心内容之一。
2. 多模态信息的理解和分析多模态认知计算要实现的一个重要目标是对多模态信息进行理解和分析。
这涉及到对不同形式信息的特征提取、语义理解、情感分析等多个方面的研究。
多模态信息的理解和分析可以帮助计算机更好地理解人类的语言、动作、情感等,为智能交互、智能搜索等方面的应用提供技术支持。
3. 多模态信息的应用多模态认知计算的最终目的是要将其研究成果应用到实际生活和工作中。
多模态信息的应用涉及到多个领域,比如多媒体检索、智能影像分析、人机交互、智能医疗等。
通过多模态认知计算技术的应用,可以更好地满足人们对信息的获取、理解和应用的需求,推动人工智能、大数据等领域的发展。
四、多模态认知计算的研究方法多模态认知计算的研究方法包括数学建模、机器学习、深度学习、认知科学等多个方向的技术和理论。
在多模态数据融合方面,研究者可以借鉴模式识别、统计学习等领域的成果,设计有效的数据表示和融合算法。
视听觉信息处理与认知研究
视听觉信息处理与认知研究第一章引言视听觉信息处理与认知研究是一门专业性强的学科,它主要关注人类的感知机制和认知过程以及它们与视听觉信息的交互关系。
本文将从不同角度对这一领域进行探讨,包括信息处理的基本原理、感知过程的神经机制、大脑认知与视听觉信息的关系以及应用领域的发展趋势。
第二章信息处理的基本原理视听觉信息处理是指将视听信号转化为有意义的认知信息的过程。
信息处理的基本原理包括感知、编码、存储和检索。
感知是感受外界刺激并将其转化为神经信号的过程,包括视觉感知和听觉感知。
编码是将感知到的信息转化为神经活动模式的过程,包括编码规则和编码模型。
存储是将信息储存到记忆系统中的过程,包括短时记忆和长时记忆。
检索是从记忆系统中提取信息的过程,包括记忆检索和注意力控制。
第三章感知过程的神经机制感知过程的神经机制是视听觉信息处理与认知研究的核心内容之一。
视觉感知神经机制主要包括感光细胞对光信号的感知、视网膜与脑内视觉核团的信息传递、大脑皮层对视觉信息的处理等。
听觉感知神经机制主要包括耳蜗对声音的感知、听觉神经传递声音信号、大脑皮层对听觉信息的处理等。
神经机制的研究有助于深入了解感知过程的生理学基础,从而进一步探索视听觉信息的认知过程。
第四章大脑认知与视听觉信息的关系大脑是人类视听觉信息处理与认知的中心,同时也是感知和认知之间的桥梁。
研究表明,感知和认知是相互依存的。
大脑皮层在视听觉信息的感知过程中起到重要作用,包括大脑皮层的特异性区域与视听觉感知功能的联系、大脑皮层的联合处理以及大脑皮层与其他脑区的功能连接等。
此外,大脑结构与认知能力之间也存在着一定的联系。
通过研究大脑认知与视听觉信息的关系,可以更好地理解人类的感知认知过程。
第五章应用领域的发展趋势视听觉信息处理与认知研究在科学研究和应用领域具有广阔的前景。
在科学研究方面,对视听觉信息处理与认知的深入研究可以为神经科学、认知心理学、人工智能等领域的发展提供理论支持和实际应用。
2010视听觉信息的认知计算

国家自然科学基金委员会重大研究计划 2010年“视听觉信息的认知计算”学术交流会程序册国家自然科学基金委员会信息科学部“视听觉信息的认知计算”重大研究计划指导专家组2010年12月23日—24日·北京西郊宾馆2010年学术交流会委员会会议主席柴天佑(国家自然科学基金委员会信息科学部)郑南宁(重大研究计划指导专家组/西安交通大学)李德毅(重大研究计划指导专家组/总参61所)组织委员会秦玉文(主任,国家自然科学基金委员会信息科学部)张兆田(副主任,国家自然科学基金委员会信息科学部)王成红(秘书长,国家自然科学基金委员会信息科学部)王岐东(国家自然科学基金委员会计划局)张文岭(国家自然科学基金委员会数理科学部)曹河圻(国家自然科学基金委员会生命科学部)孟太生(国家自然科学基金委员会信息科学部)程序委员会陈霖(主任,重大研究计划指导专家组/中国科学院生物物理研究所) 胡德文(副主任,重大研究计划指导专家组/国防科学技术大学)孙富春(重大研究计划指导专家组/清华大学)杨静宇(重大研究计划指导专家组/南京理工大学)宗成庆(重大研究计划指导专家组/中国科学院自动化研究所)常谦顺(重大研究计划指导专家组/中国科学院数学与系统科学研究院)辛景民(秘书,重大研究计划指导专家组/西安交通大学)日程安排时 间 内 容 地 点 12月22日(周三)14:00—22:00会议注册12月23日(周四)08:00—08:30 会议注册北京西郊宾馆五号楼一层大厅08:30—09:30 学术交流会开幕式主持人:组委会秦玉文主任领导讲话:孙家广院士(国家基金委副主任)柴天佑院士(国家基金委信息学部主任)郑南宁院士(指导专家组组长)李德毅院士(指导专家组副组长)会议介绍:组委会张兆田副主任/王成红秘书长北京西郊宾馆五号楼二层金缘厅时间会场A(一号楼第5会议室)会场B(一号楼第6会议室)12月23日(周四)09:40—10:00 茶歇10:00—11:20 A1:脑机接口—1(4篇)主持人:胡德文教授B1:图像处理—1(4篇)主持人:杨静宇教授12:00—13:30 午餐13:40—15:40 A6:人脸识别(6篇)主持人:胡德文教授B2:无人驾驶验证平台—1(6篇)主持人:孙富春教授15:40—15:50 茶歇15:50—17:50 A3:脑机接口—2(6篇)主持人:高上凯教授B3:无人驾驶验证平台—2(6篇)主持人:杨静宇教授18:00—19:30 晚餐19:45—21:00 缩微智能车驾驶行为演示(五号楼前集合乘车、前往清华大学)12月24日(周五)08:00—10:00 A4:图像处理—2(6篇)主持人:常谦顺研究员B4:自然语言(6篇)主持人:宗成庆研究员10:00—10:10 茶歇10:10—11:50 A5:多模态与视频处理(5篇)主持人:孙富春教授B5:无人驾驶验证平台—3(5篇)主持人:王成红研究员12:00—13:30 午餐14:00—16:00 A2:认知(6篇)主持人:陈霖院士B6:语音与听觉信息(5篇)主持人:颜永红研究员16:00—16:10 茶歇16:10—17:30 重大研究计划工作会议备注:12月23日分组报告的时间安排因故调整,具体安排请以此表为准。
认知计算和神经科学研究
认知计算和神经科学研究一、引言认知计算和神经科学研究是两个相似但不同的领域,它们都致力于理解人类智能的本质和大脑如何工作的机制。
认知计算关注人类智能是如何通过计算机来模拟的,而神经科学研究则关注大脑是如何进行信息处理和组织的。
然而,这两个领域的研究都受到了对人类智能与机器智能之间关系的兴趣的推动。
二、认知计算认知计算是一种研究方法,专注于构建计算模型以模拟人类智能的行为和思维过程。
认知计算是通过交叉学科的方法,包括控制论、信息论、人工智能、心理学和神经科学等学科来实现的。
在计算科学中,认知计算主要涉及到两个方面:一是基于人工智能研究人类智能的计算模型;二是利用计算机来模拟人类大脑的处理能力。
在人工智能方面,认知计算研究致力于构建计算模型,以模拟大脑决策-making、感知、思维、学习和记忆等能力,以此来探究これら能力的本质和其背后的计算逻辑。
与传统的基于规则的人工智能相比,认知计算更注重人脑的内部运作,将人类智能视作对信息的受理和加工,并通过计算建模的方式来反复模拟这一过程,以达到更准确的模拟人类智能行为。
在神经科学方面,认知计算研究将拓展以大脑为中心标志的研究视角,进而促进对大脑的认知机制更全面更深入的理解,包括大脑如何分别处理激发感官感知的多参数信息流、如何进行信息储存和检索,以及如何对复杂的环境与任务作出决策和响应等。
三、神经科学神经科学是一门致力于理解大脑与神经系统如何工作的学科。
人类大脑是一种最为演化而来的复杂生物器官,它处理着人类生活的各个方面,包括感知、思考、记忆、行动、甚至是个体的情绪和行为。
神经科学研究意在揭示大脑如何转变外部刺激、行为和记忆成为神经元活动。
神经科学家运用各种技术手段,例如细胞和电生理学,从不同角度记录和分析神经元之间的信号传递过程,不断发现大脑中日益复杂的信息处理和自组织的特性。
近年来,随着神经科学技术的飞速发展,研究者们取得了巨大的成就。
比如,在2018年6月28日的《Science》杂志上,美国罗切斯特大学等机构的神经科学家发表一篇论文,探讨了大脑中“时间窗”这一神经现象,并提供了新的脑模型解释其行为机制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件2:重大研究计划“视听觉信息的认知计算”2008年度项目指南与人类视听觉感知密切相关的图像、语音和文本(语言)信息在社会、经济和国家安全等领域中扮演着重要角色,并在今后一段时间内仍将迅猛增长。
这类信息可被人类直接感知和理解,也可用计算机进行处理,但计算机的处理能力远逊于人类且处理效率远不能满足当今社会的发展需求。
如何借鉴人类的认知机理和相关数学的最新研究成果,建立新的计算模型和方法,从而大幅度提高计算机对这类信息的理解能力与处理效率,不仅可有力推动信息科学的快速发展,也将为国民经济和社会发展做出重大贡献。
一、科学目标本重大研究计划的总体科学目标是:围绕国家重大需求,充分发挥信息科学、生命科学和数理科学的交叉优势,从人类的视听觉认知机理出发,研究并构建新的计算模型与计算方法,提高计算机对非结构化视听觉感知信息的理解能力和海量异构信息的处理效率,克服图像、语音和文本(语言)信息处理所面临的瓶颈困难,为确保国家安全与公共安全、推动信息服务及相关产业发展以及提高国民生活和健康水平做出重要贡献。
具体表现为:在视听觉信息处理的基础理论研究方面取得重要进展;在视听觉信息协同计算、自然语言(汉语)理解以及与视听觉认知相关的脑―机接口等三项关键技术方面取得重大突破;集成上述相关研究成果,研制具有自然环境感知与智能行为决策能力的无人驾驶车辆验证平台,主要性能指标达到世界先进水平,从而提升我国在视听觉信息处理领域的整体研究实力,培养具有国际影响力的优秀人才与团队,为国家安全和社会发展提供相关研究环境与技术支撑。
二、核心科学问题本重大研究计划将围绕“感知特征提取、表达与整合”、“感知数据的机器学习与理解”和“多模态信息协同计算”等核心科学问题,组织并实施如下四个主要方面的研究工作。
(一)图像与视觉信息计算。
主要研究图像与视觉信息计算的认知机理,视觉基本特征的提取与选择,物体识别与图像内容理解,复杂场景下运动目标的行为分析等。
提出若干图像与视觉信息的高效计算模型,取得国际公认的原创性研究成果(在Nature, Science, IEEE Trans. PAMI等刊物上发表高水平论文),培养具有国际影响力的优秀人才与研究团队。
(二)语音与听觉信息计算。
主要研究听感知机理与音频场景分析,自然环境下的语音识别与合成,口语对话分析与理解等。
取得国际上有影响的原创性研究成果,提出若干语音与听觉信息的有效计算模型,在本领域国际权威刊物上发表高水平论文,培养具有国际影响力的优秀人才与研究团队。
(三)自然语言(汉语)理解。
主要研究语言加工的认知机理,语言知识建模和语义计算模型,基于语义理解的机器翻译方法,面向网络的汉语适度理解模型和系列分析工具,支持自然环境下口语对话分析、识别与理解的关键技术等。
在国内已有相关成果的基础上,统筹构建大规模高标准汉语语义知识库。
将上述研究成果应用到语言(汉语)信息处理典型系统中,显著提高对自然语言(句子、段落、篇章)的理解能力,并在网络信息检索、过滤和知识获取方面得到验证。
(四)多模态信息的协同计算与脑—机接口。
主要研究多模态感知信息协同的认知机理与计算模型,基于视听觉信息融合的模式识别与环境交互方法,跨模态视频信息检索与网络敏感信息过滤技术等。
大幅度提高跨模态视频信息检索的查准率,显著提升本领域整体研究实力。
研究与视听觉认知相关的脑信号提取、脑区定位与脑功能网络分析方法和技术,脑—机交互中的信号传输、处理与控制技术,与视听觉认知相关的脑—机接口典型应用。
在改善残疾人生活质量和功能康复等方面得到验证或应用,为延伸和提高人类行为控制能力提供新技术。
三、关键技术与集成验证平台在上述研究工作的基础上,本重大研究计划进一步开展与视听觉信息处理相关的关键技术和集成验证平台研究。
(一)视听觉信息协同计算的关键技术。
研究机器视听觉信息的协同计算模型及系统实现技术,基于视听觉信息融合的模式识别技术与验证系统,跨模态视频信息检索与网络敏感信息过滤技术及应用。
基于多模态协同计算模型的网络视频信息搜索的查准率比同期国外最好水平高5%—10%,并在网络信息安全与服务等领域得到验证。
(二)自然语言(汉语)理解关键技术。
研究汉语通用词汇的规范化语义知识库及其构建技术,面向网络的汉语适度理解模型及系列分析工具的实现技术,支持自然环境下口语对话分析、识别与理解的关键技术。
在国内现有相关成果的基础上,统筹构建汉语语义知识库,汉语通用词汇规模不小于5万词,带有语义标注的汉语平衡语料库规模不小于1千万字。
将研究成果应用到网络环境下的汉语处理系统中,信息检索与知识获取的准确率比现有最好技术提高20%以上。
(三)与视听觉认知相关的脑―机接口关键技术。
研究与视听觉认知相关的脑信号提取、脑区定位与脑功能网络分析技术,脑—机交互中的信号传输、处理、控制技术及系统实现,与视听觉认知相关的脑—机接口典型应用。
所提无创脑―机接口信息提取与分析等技术处于同期国际领先水平,在改善残疾人生活质量和功能康复等方面得到验证或应用。
(四)无人驾驶车辆集成验证平台。
集成上述基础理论与关键技术的相关研究成果,将传统视觉计算模型与新的视觉认知模型相结合,实现环境感知与建模方法新突破;实现多传感器跨模态跨尺度信息融合,生成高质量三维场景认知地图,构建高性能智能车辆无人驾驶验证平台;提供新的基于人—车—路状态综合分析的智能辅助安全驾驶关键技术;在国防、智能辅助安全驾驶等相关领域得到验证或应用并产生重要影响。
四、2008年度拟资助的研究项目本重大研究计划主要以“培育项目”、“重点支持项目”和“集成项目”的形式予以资助,三类项目在资助强度和实现目标上有所不同。
对有较好的创新学术思路和研究价值,但尚需进一步探索研究的申请项目,将以“培育项目”方式予以资助。
对有很好的创新学术思想和研究价值,有良好的研究基础和成果积累,且对研究计划总体目标有较大贡献的申请项目,将以“重点支持项目”的方式予以资助。
对实现研究计划总体目标有决定作用的研究方向,将以更大支持强度的“集成项目”方式予以资助。
根据项目执行的年度进展情况或考察结果,本重大研究计划将适度调整获准项目的资助经费(中止课题或追加经费)。
2008年度拟资助如下领域的“重点支持项目”及与其相关的“培育项目”。
(一)多模态信息协同计算方面。
1.“重点支持项目”的研究方向:面向互联网的跨媒体挖掘与搜索引擎融合自然语言理解、图像与视频分析及跨媒体数据挖掘等多领域交叉的新方法,研究有效的网络文本、图像与视频内容挖掘方法和有效的网页分析技术,构建精度高、速度快和鲁棒性强的垂直搜索算法,研发面向特定用户的互联网跨媒体搜索引擎。
考核目标:特定领域文本内容的查准、查全率均在90%以上;特定领域图像与视频内容的查准、查全率均在70%以上;可实现准实时的互联网跨媒体内容挖掘与搜索。
2.“培育项目”的研究方向:(1)文本、图像和语音感知信息交互的选择性注意机理、语义特征提取;(2)“情境(Ambient)智能”的多模态信息协同计算。
(二)自然语言(汉语)理解方面。
1.“重点支持项目”的研究方向一:网络文本的语义计算与理解建立高标准、规模化、易扩展的语义知识库(包括词条、句子和篇章级的核心语义标注);建立面向大规模汉语文本的语义计算框架和计算模型;研究基于内容的网络文本信息检索、事件检测和内容文摘等的关键技术,实现特定语义目标的网络内容理解。
考核目标:研究所得的语义计算与理解方法明显优于非语义方法,特定网络文本信息检索的准确率较现有技术至少提高20%。
2.“重点支持项目”的研究方向二:多模态口语对话内容的分析与理解以口语为主,综合语音、视觉、行为、情感等跨模态信息,研究建立人类口语对话模型,支撑口语对话的理解和人机语音交互。
考核目标:面向汽车语音导航和语音通讯等领域,研制多模态口语人机自然对话原型系统,特定对话主题的理解准确率大于90%,人机对话的正确响应率大于80%,任务完成率大于90%。
3.“培育项目”的研究方向:(1)汉语认知机理的语言心理学研究;(2)适于句子和篇章的汉语语义计算模型;(3)听觉感知机理与音频场景分析;(4)语义计算与理解的资源共享与测评。
(三)脑—机接口方面。
1.“重点支持项目”的研究方向:与视听觉认知相关的人机交互关键技术研究与视听觉认知相关的脑信号提取与脑区定位技术;脑—机交互中的信息传输、处理与控制技术;与视听觉相关的脑—机接口应用技术。
考核目标:提出并实现脑—机交互的在线自动模式学习策略,提高脑―机接口系统的鲁棒性和自适应性;在脑电信息的提取、分析和应用方面处于同期国际领先水平;在与视听觉相关的残疾人功能康复方面得到验证或应用。
2.“培育项目”的研究方向:(1)基于脑―机接口的车辆导航与控制技术;(2)脑电信号的无创采集、传输和处理;(3)脑―机交互范式的新概念与新方法。
(四)驾驶行为的认知机理方面。
1.“重点支持项目”的研究方向:驾驶行为的认知机理和神经表达—选择性注意及与动作的相互关系选择性注意是人类驾驶行为的一个不可缺少的认知功能。
对选择性注意的研究以及对驾驶行为注意研究的一个根本问题是:“注意选择的究竟是什么?”。
本项目要求在这个认知科学的重大问题上取得实质性突破,特别是,提出和发展基于“物体”的选择性注意原创性系统理论,并应用于无人驾驶的环境感知计算模型。
一方面建立物体表达概念的科学定义,以及物体表达和驾驶行动交互作用的认知机理的准确描述;另一方面利用脑功能成像的各种方法,发现基于物体注意和驾驶行动的大脑皮层的神经表达。
从而为建立具有主动视觉功能和“注视转移”机理的驾驶行为新模型提供认知科学基础。
2.“培育项目”的研究方向:(1)驾驶行为的知觉学习;(2)眼动和注意调节的认知机理与主动视觉;(3)驾驶员的行为心理学与认知结构模型。
(五)无人驾驶车辆集成验证平台方面。
1.“重点支持项目”的研究方向:无人驾驶车辆的关键技术与系统平台考核目标:在遵守交通法规的前提下,实现以下三种路况自主驾驶。
(1)城市道路:要求车辆能够安全并入及驶出多车道交通场景,具有保持车道、换道和超车的能力,行驶里程约5公里;在部分路段中能够通过一连串平行停放的车辆和路障,且能行驶到位于其它停放车辆中间的指定停车点。
测试环境:人与车辆较为密集,测试道路有多个十字路口,测试车辆能对障碍物进行识别,并能掉头重新选择行驶路径。
(2)高速公路:行驶里程约2000公里,人工干预里程小于3%;能安全有效地超车并汇入车流;能准确识别高速公路上的常见交通标志,并做出正确安全的驾驶动作。
测试环境:测试道路上有多个高架桥路口。
(3)乡村道路:在各种路表(土路、砂石路、水泥或沥青等)条件下,行驶里程约200公里,人工干预里程小于4%;能保持车道、安全跟随和超越前方车辆,能停车、重新启动和绕行;能识别障碍物,并能避免与行人、自行车和路边树木、电线杆等物体碰撞。