车载升降桅杆倒伏机构设计示范文本
折叠桅杆机构设计方案
折叠桅杆机构设计方案
折叠桅杆是一种可以将桅杆快速折叠,使得船舶或建筑物容易通过狭窄的水道或通道的机构。
为了设计一个有效的折叠桅杆机构,需要考虑到结构的稳定性、可靠性和操作的方便性。
下面是一个折叠桅杆机构的设计方案。
首先,折叠桅杆机构由支撑结构和折叠机构两部分组成。
支撑结构用于支撑桅杆的重量和承受风力的作用,而折叠机构用于实现桅杆的折叠和展开。
支撑结构部分,选择轻质但具有足够强度的材料,如铝合金或碳纤维等。
在设计桅杆的高度和直径时,要考虑到船舶或建筑物的需求,同时确保结构的稳定性。
此外,可以在桅杆顶部安装固定点,用于连接折叠机构和桅杆。
折叠机构部分,主要包括连接杆和折叠机构。
连接杆由高强度金属材料制成,如不锈钢,以确保其足够的刚性和可靠性。
在设计连接杆时,需要考虑到桅杆的高度和重量,以及折叠的平稳性和可操作性。
折叠机构可以采用液压或机械式的方式。
液压方式可以提供更平稳的折叠过程,但需要额外的液压系统。
机械式的方式相对简单,但可能会在折叠过程中产生一些震动。
在设计折叠机构时,要保证其稳定性和可靠性,同时考虑到操作的便捷性和安全性。
在实际操作中,可以通过操纵杆或按钮来控制折叠机构的运动。
为了增加操作的安全性,可以设计一个自锁装置,确保在桅杆折叠或展开过程中都能保持稳定。
总之,折叠桅杆机构的设计需要考虑到结构的稳定性、可靠性和操作的方便性。
通过选择适当的材料和设计合理的支撑结构和折叠机构,可以实现一个有效的折叠桅杆机构,提高船舶或建筑物在狭窄通道中的通过能力。
车辆工程毕业设计53汽车改装式升降台设计adams%CATIA%ansys正文

第1章绪论1.1选择的背景、研究目的及意义升降台是一种多功能起重装卸机械设备、是一种将人或者货物升降到某一高度的升降设备。
升降平台可分为:固定式、移动式、导轨式和曲臂式。
固定式有:剪叉式升降货梯、链条式升降机、装卸平台等。
移动式分为:四轮移动式升降平台、二轮牵引式升降平台、手推式升降平台、手摇式升降平台、交直流两用升降平台、电瓶车载式升降平台、自行式升降平台、柴油机曲臂自行式升降平台、折臂式升降平台、套缸式升降平台、铝合金升降平台和汽车改装式升降平台,起升高度从1米至20米不等。
铝合金升降平台可分为单柱铝合金,双柱铝合金,三柱和四柱铝合金。
汽车改装式升降台可用于工厂、自动仓库、停车场、市政、码头、建筑、装修、物流、电力、交通,石油、化工、酒店、体育馆、工矿、企业等的高空作业及维修。
升降平台升降系统,是靠液压驱动,也被称作液压升降平台。
在工厂、自动仓库等物流系统中进行垂直输送时,升降平台上往往还装有各种平面输送设备,作为不同高度输送线的连接装置。
一般采用液压驱动,故称液压升降台。
除作为不同高度的以下步骤中我们驱动将液货物输送外,广泛应用于高空的安装、维修等作业。
是一种将人或者货物升降到某一高度的升降设备。
在工厂、自动仓库等物流系统中进行垂直输送时,升降平台上往往还装有各种平面输送设备,作为不同高度输送线的连接装置。
一般采用液压驱动,故称液压升降台。
除作为不同高度的货物输送外,广泛应用于高空的安装、维修等作业。
目前,发达国家生产的汽车改装式升降台质量较好、性能较稳定、设备操作简单,在经销商中口碑良好。
我国的汽车改装式升降台是20世纪90年代依据国外的产品技术生产的,到现在举升机市场已经拥有近百个中外品牌,产品系列成百上千。
然而汽车改装式升降台虽然也相对定型,但很多产品性能还不够稳定,故障多,可靠性差,外观不够美观,在产品设计、技术开发等方面都还有很多地方有待改进。
因此,进一步提高产品性能与可靠性,是国内汽车改装式升降台任重道远且亟需改进的地方。
C网应急车天线倒伏系统

. 4 馈 线绞盘 设计 为基础 , 对 内部齿轮 进行重新设计, 使其能达 到系统承 重要求 3 [ 4 ] 馈线绞 盘固定与车体下部 , 用于缠绕 馈线 , 它随天线
3 . 1天线倒伏方位设计
降而 自由转动 , 天 线馈线与倒伏机构 电源线呈 “ 一” 字型排
天线 端馈 线接 头 已提前 固定好, 减 设计 初期 , 天 线斜 倒于车头 , 天 线 由支架 受力, 但考虑 到 并用 防水布进 行包 扎 。
一
解决通信车在通 过涵洞 、 树林、 立交 桥等一系列障碍物 或进入 组成。 天线端 馈线接头采 用弯头 固定 , 另一端 馈线头 分别
车库 时, 车载通 信天线 因超 高易被 撞坏 , 造 成通信 中断 的问题 接至馈线 绞盘。 控制器 与倒伏减轻 维护人员工作压力的目的。
不 。
要两至三 人配合才能完成 , 且 须3 0 分钟左 右, 这样既浪费 时间
也耗 费人力。 随着应急支撑任务对时效性和支撑效果 的要求越
来越高, 必须寻求一种既省时又省力的解决办法。因此, 特针对
图1 天线倒伏 方位 图 现有C 网应急车 的天 线系统进 行倒伏 系统改造 , 安装 使用机 电 3 . 2倒 伏 系统 线 路设计 体化控制系 统, 使 车载天线按 控制指令 自动倒伏和竖直 …, 天 线倒 伏系 统 由倒 伏机 构、控制 器、 馈 线 绞盘 三大
1 前言
车头 与车厢距 离过远 , 天线着力面 积太小, 车辆行 进过程
所 以在 车 厢 侧 面 加 装 支 架 平 台 , 将天 线 朝 向改 为侧 c 网应急车作为网络补盲, 及 时疏通话 务量 的重要手段, 在 晃 动 , 车箱支架平 台, 这样既美观 , 又稳 固。 天线 倒伏方位图如E 网络覆盖不足地 区、 大 型集会现场等地发挥着 越来越重要 的作
车辆工程毕业设计23GKT-13型高位举升路灯维护车改装设计(举升部分)

第1章绪论1.1 选择背景、研究目的及意义随着我国现代化的不断发展,大中城市的建设日新月异,对城市基础设施的维护需求更将旺盛进而对高位举升车的需求也是与日俱增。
高空作业车的发展与国民经济的发展水平密切相关,据国外高空作业机械专业媒体杂志《Access International》报道,经济越发达,需求量越大,并且单位GDP需求量也越大,这也恰恰说明我国高空作业车友非常广阔的发展前景。
高空作业车主要用于电力、路灯维护、市政、园林、通信、机场、造(修)船、交通、广告、摄影等高空作业领域。
在国外,很多高空作业车都可以用作搬家等。
高空作业车的底盘分通用型和专用型,采用通用型底盘的高空作业车具有机动灵活,能快速移动,作业高度较高,采用专用地盘的高空作业车适用于固定作业场所,具有微动形式,扩大作业半径等特点,具有较强的应用针对性。
因此,通过对现有高位举升车产品进行调研,详细的进行使用情况、故障情况调查,进行总体结构改装优化方案设计,并通过测绘,应用当前CAD/CAE领域应用比较广泛的三维软件Pro/E、有限元软件ANSYS,进行汽车举升机的强度、刚度、稳定性等方面的计算机仿真研究与分析进一步优化产品性能,提高汽车举升机的稳定性和可靠性。
课题的目的:通过对学校高位举升路灯维护车的使用情况的调研,了解设计其过程中出现的问题,并提出改进方案,用增加自动限制幅度、高度、载荷、角度、支腿的稳定性等安全措施提高学校高位举升路灯为回车的安全性,并运用材料力学、理论力学的理论基础和计算方法,在满足材料强度、刚度和稳定性的条件下,设计既经济又安全的金属结构,优化车辆的设计发现并更正设计缺陷,完善设计方案,通过对学校高位路灯维护车的改装,从而研制出一种高稳定性、高可靠性、高适用性的好产品。
课题的意义:意义通过对学校高位路灯维护车的改装设计究能够使学生了解专用汽车改装设计方法,通过本课题的研究,学生可以运用所学的汽车构造,专用汽车改造,汽车理论,汽车设计等专业知识,加深对汽车专业技能的理解理论课程的实践总结,获得一定的工程设计工作方法。
车载升降桅杆倒伏机构设计

车载升降桅杆倒伏机构设计在通信、电子对抗、雷达系统等无线电领域,常常将天线设备安装在车载升降桅杆上。
一般情况下,升降桅杆竖直固定在运输方舱的侧壁,而有些情况下由于设备工作的需要,升降桅杆的闭合高度很高,安装在方舱侧壁会超过运输高度界线,这就有必要设计出一种使升降桅杆便于在运输状态和工作状态自如转换的安装机构来避免超高。
本文介绍的车载升降桅杆倒伏机构正是为了解决这一问题而设计的一种手动式升降桅杆翻转安装机构,使用它只需1人便可将闭合高度为3m以上的升降桅杆由舱后壁竖直工作状态轻松转换为舱顶水平运输状态,且省时省力,安全可靠。
在通信、电子对抗、雷达系统等无线电领域,常常将天线设备安装在车载升降桅杆上。
一般情况下,升降桅杆竖直固定在运输方舱的侧壁,而有些情况下由于设备工作的需要,升降桅杆的闭合高度很高,安装在方舱侧壁会超过运输高度界线,这就有必要设计出一种使升降桅杆便于在运输状态和工作状态自如转换的安装机构来避免超高。
本文介绍的车载升降桅杆倒伏机构正是为了解决这一问题而设计的一种手动式升降桅杆翻转安装机构,使用它只需1人便可将闭合高度为3m以上的升降桅杆由舱后壁竖直工作状态轻松转换为舱顶水平运输状态,且省时省力,安全可靠。
设计目标在部队野战备战或应急通讯等过程中,对设备的作业准备时间要求很苛刻,有时将机动架设时间缩小至几分钟,在车载升降桅杆倒伏机构设计过程中充分考虑了这一指标要求,同时兼顾升降桅杆的安装及使用条件,按照以下设计目标设计和验证。
2.1.由1人全程操作,操作时间不大于5分钟;2.2.可安装的升降桅杆闭合高度不小于3米,重量不小于200公斤;2.3.结构简单,安装方便;2.4.操作便捷、省力、安全;2.5.通用性强,结构稍作更改便可适用不同规格的桅杆安装。
结构组成与功能原理3.1.总体结构与工作过程倒伏机构主要由舱顶轨道、翻转架和固定架三大部分组成,舱顶轨道固定在方舱顶壁,固定架固定在方舱后壁,翻转架是倒伏机构的主要部分,与固定架上端的上固定座铰接。
车载装置升降系统设计
本科毕业设计车载装置升降系统院(系、部)名称:专业名称:学生姓名:学生学号:指导教师:2011年5月25 日河北科技师范学院教务处制学术声明本人呈交的学位论文,是在导师的指导下,独立进行研究工作所取得的成果,所有数据、图片资料真实可靠。
尽我所知,除文中已经注明引用的内容外,本学位论文的研究成果不包含他人享有著作权的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确的方式标明。
本学位论文的知识产权归属于河北科技师范学院。
本人签名:日期:指导教师签名:日期:摘要本设计是根据国内外雷达车的发展趋势,通用性、适应性以及稳定性不断提高,本着结构简单、操作灵活的原则,而设计的一种能同时完成调节水平、自动举升的雷达车。
本文具体阐述了一种车载装置升降系统的设计和开发过程。
本课题所研制的车载装置升降系统可以实现预期的雷达的举升和下降。
在自动调平系统工作结束以后,通过设计的举升液压缸的伸出和缩回,带动塔架的举升和下降,从而实现雷达的举升和下降。
同时设计过程中考虑了整个雷达受到本身重力和风力的影响,着重对稳定性以及适应性进行设计选择。
关键词:液压缸;雷达;自动调平系统AbstractThe design is based on the development radar vehicle in and out country, interoperability,adaptability and stability in a constantly improving the structure and operation of flexible simple principles designed to simultaneously accomplish a radar vehicle which is complete adjust level, automatic lifting.The topic of my paper is vehicle-mounted machine automatically transferred Ping mechanical systems design and development.This topic the on-board device developed lifting system can achieve the desired radar lifting and decline.In automatic levelling system through the design work finished, the lifting hydraulic cylinder of reaching out and retract, driving the tower lifting and falling, thus realize the lifting and decline.Meanwhile the design process by considering the whole radar the influence of gravity and wind itself, focuses on the design choices stability and the adaptability.Keywords:hydraulic cylinder ;Radar;automatically leveling system.目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 论文研究背景与意义 (1)1.2结构设计要求 (1)2 方案论证 (2)2.1 主要技术指标 (2)2.2 技术可行性 (2)2.2.1 技术方案 (2)2.2.2 塔架结构 (2)2.2.3 塔架的举升执行机构 (2)2.2.4 塔架索拉结构 (2)2.2.5 承载支腿 (2)2.2.6 辅助支撑结构及其他 (3)2.3 升降天线车的液压系统说明 (3)2.3.1 举升伸缩油缸单元与塔架锁紧单元 (3)2.3.2 脚支腿液压单元 (3)2.3.3 中支腿与索拉液压单元 (3)2.3.4 结构方案和液压传动系统的可行性和可靠性 (3)2.4 测试系统的组成及功能 (4)2.4.1 测试系统功能方框图 (4)2.4.2 水平测试仪 (4)2.4.3 智能远端 (4)2.4.4 工控机 (4)2.4.5 比例阀及伺服阀 (5)2.4.6 水平调整过程 (5)2.5 主要技术难点分析 (5)3设计计算过程 (6)3.1雷达举升机构的力学分析 (6)3.1.1刚度校核 (7)3.1.2强度校核 (8)3.2缸的设计 (10)3.2.1液压回路 (10)3.2.2缸的尺寸设定 (11)3.2.3缸的强度分析 (12)3.3缸的连接及材料 (13)3.3.1缸体端部连接形式 (13)3.3.2缸体材料 (13)3.3.3缸体得技术条件 (14)3.3.4活塞 (14)3.4 塔架的设计 (21)3.4.1 塔架尺寸的确定 (21)3.4.2 塔架的结构 (21)3.5机动式车载雷达稳定性设计分析 (21)3.5.1雷达车质心位置及轴荷分配 (21)3.5.2雷达车行驶稳定性设计分析 (22)结论 (26)参考文献 (27)致谢 (27)1 绪论1.1 论文研究背景与意义现代高技术战争对雷达的越野作战与战场生存能力提出了越来越高的要求,以达到战时快速组网及补充战损的目的,高度的机动能力已经成为现代军事雷达的必备素质;因此,对于雷达设计师来说,在考虑整机电性能指标、可靠性、可维性、可保障性、安全性、可操作性、经济性及加工工艺性等因素的同时,还须从结构上对其机动性作出精心构思。
举升机构的设计说明书
2.6 举升机构的设计自卸汽车举升机构又称倾卸机构,包括车箱、车厢板锁紧机构、液压举升系统和举升连杆等组成。
其作用是将车厢倾斜一定的角度,使车厢中的货物自动倾卸下来,然后再使车厢降落到车架上。
2.6.1 自卸汽车举升机构的结构形式根据举升液压缸与车厢的连接形式的不同,分为直推式举升机构和连杆式举升机构两大类。
自卸汽车对举升机构的设计要求如下:(1)利用举升机构实现车厢的翻转,其安装空间不能超过车厢底部与主车架间的空间;(2)结构要紧凑,可靠,具有很好的动力传递性能;(3)完成倾卸后,要能够复位;(4)在最大举升角时,车厢后板下垂最低点与地面保持一定斜货高度。
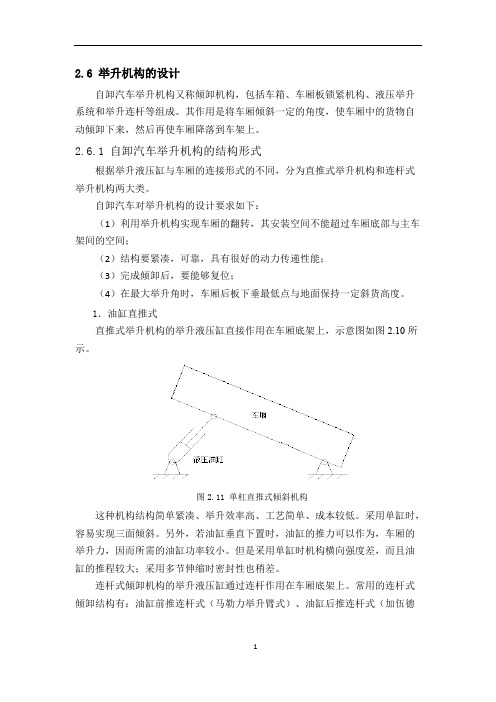
1.油缸直推式直推式举升机构的举升液压缸直接作用在车厢底架上,示意图如图2.10所示。
图2.11 单杠直推式倾斜机构这种机构结构简单紧凑、举升效率高、工艺简单、成本较低。
采用单缸时,容易实现三面倾斜。
另外,若油缸垂直下置时,油缸的推力可以作为,车厢的举升力,因而所需的油缸功率较小。
但是采用单缸时机构横向强度差,而且油缸的推程较大;采用多节伸缩时密封性也稍差。
连杆式倾卸机构的举升液压缸通过连杆作用在车厢底架上。
常用的连杆式倾卸结构有:油缸前推连杆式(马勒力举升臂式)、油缸后推连杆式(加伍德举升臂式)、油缸前推连杆式、油缸后推连杆式、油缸浮动连杆式、油缸俯冲连杆式。
表2-11自卸汽车举升机构特性比较结构型式车型举例性能特征结构示意图油缸前推连杆组合式五十铃TD50ALCQD 、QD362举升力系数小,省力,油压特性好,但缸摆角大活塞行程稍大。
油缸后推连杆组合式五十铃TD50A-D 、QD352、HF352转轴反力小,举升力系数大,举升臂较大,活塞行程短。
油缸后推连杆组合式日产PTL81SD 举升力适中,杆系受力比较小,举升过程中油缸的摆动角度很小,油缸的行程也比较短,但因为机构集中在车后部,车厢底板受力大。
油缸浮动连杆式YZ-300油缸进出油管活动范围大,油管长,举升力系数较小。
车载式升降作业平台的研制

车载式升降作业平台的研制摘要:由于班组目前面临老龄化、缺员等问题,因此,一些登高测量、调试、操作任务成为班组难以分配的工作之一。
现研制一种多用途车载式升降作业平台,以克服班组登高作业人员占比少等不利因素。
关键词:车载式升降平台液压系统引言近年来随着公司电网建设步伐加快,电网装备技术水平持续提升,特别是配电自动化建设项目在我们公司实行全覆盖,这对人才的专业水平和人员配备提出了更高的要求。
由于基层班组缺员、缺技术情况较为普遍,加之配电运维专业如今涉及的专业技术较广,工种划分越来越模糊,因此培养复合型人才是班组今后培训工作中一项重要的任务。
针对班组目前面临的新形势、新困难,公司积极采取了一些有效措施,如新进大学生充实班组新生力量、从其他相关专业抽调人员充实到班组来,加之主多分离时一些老同志转岗到生产班组,非核心业务进行外包等措施以减轻班组负担。
但一线班组人员老龄化、缺员等问题,仍然制约班组核心业务的开展。
1、概述1.1. 术语和定义车载式:装置与车辆可进行快速装拆,并可随车移动。
电磁阀:电磁阀是用来控制流体控制的自动化基础元件,控制液压流动的方向,机械装置液压传动都由液压缸控制,所以都要用到电磁阀。
1.2国内外研究概况目前能够帮助我们解决依赖人力登高作业主要手段是,采用绝缘斗臂车,高空作业车,剪叉式高空作业平台进行高空作业。
因带电工作专业性要求比较高,安全风险大,再加之生产班组缺员严重等因素,目前我公司尚不具备配备绝缘斗臂车的条件;高空作业车投资大,车辆综合利用率不高,而且配备专职驾驶员;配网运维工作作业地点变动频繁,剪叉式高空作业平台移动运输较为不便,因此在配电运检工作中未受到大家的青睐。
1.3研究目的车载式升降作业平台研制主要的目的是有望实现班组人人都参与到杆变检修及柱上设备操作等高空作业任务,从而克服班组老龄化和登高作业人员占比少的问题,同时就降低劳动强度,提高工作效率,培养复合型人才,降低运维成本支出等方面进行探索。
车载升降桅杆倒伏机构设计

车载升降桅杆倒伏机构设计1. 背景车载升降桅杆是一种用于移动式摄影、舞台灯光等场合的设备,它具有重量轻、结构简单、便于安装等特点,并且具有极强的可拆卸性,这使得它在居民社区、商业街区、各类展示会等活动中得到了广泛的运用。
但是在使用过程中,由于气象因素或者台风等原因,车载升降桅杆有时会受到倒伏等意外状况,这不仅会造成财产损失,也会给人身安全造成威胁。
所以,对于车载升降桅杆的倒伏机构的设计显得尤为重要。
2. 设计要求设计一个车载升降桅杆倒伏机构,要求在桅杆发生倒伏的情况下能够及时响应并展开防护措施,保障人身安全和财产的损失。
具体要求如下:•倒伏触发机制:当车载升降桅杆倾斜角度达到一定值时,能够自动触发倒伏机构,避免车载升降桅杆发生更严重的意外。
•倒伏方式:在触发倒伏机构后,车载升降桅杆应该以最小的损失程度倒伏,避免多次倒伏导致车载升降桅杆的损坏。
•防护措施:在车载升降桅杆倒伏的同时,防止车载升降桅杆对周围环境和人造成伤害。
•可操作性:倒伏机构的设计应该具有易于操作、调节的特点,方便日常维护和保养。
3. 方案设计3.1 倒伏触发机制设计倒伏触发机制的设计是实现倒伏防护的关键所在。
本设计提出以下三种触发机制:1.基于陀螺仪的倾角检测法:在车载升降桅杆上安装陀螺仪传感器,通过对陀螺仪采集的实时数据进行分析评估,当倾角达到一定阈值时,触发倒伏机构展开。
2.基于超声波的倾角检测法:在车载升降桅杆上安装超声波传感器,通过对超声波的反射信号进行分析,得到车载升降桅杆在空间中的倾斜程度,并根据阈值触发倒伏机构展开。
3.基于附加物识别的倾角检测法:在车载升降桅杆下部安装特定的附加物感应器,当车载升降桅杆倾斜时,附加物会随之移动,感应器将通过对附加物的位置进行分析计算,判断车载升降桅杆的倾斜程度,当倾角达到预设值时,触发倒伏机构展开。
最终方案采用基于超声波检测法的倒伏触发机制,这一方案准确度高、稳定性好、对车载升降桅杆不会造成干扰。
车载升降桅杆模态分析及试验测试

[ ] 赖杰 民. 扫式 扫路车 的技 术改进及 实用效果 [] 筑 1 纯 J.
路 机 械 及 施 工 机 械 化 ,9 4 ( ) 3 —4 . 1 9 ,4 : 9 1
圾清扫 车清 扫部件 的设计 , 提高 了纯扫 式 垃圾 清 扫
车 的工 作性 能 。小 车原理 简单 、 结构紧凑 , 动力消 耗 小 。与现有路 面清 扫 设备 比较 , 制造 成本 及 使 用 其 成 本都 有大 幅下降 , 因此有 广阔 的市场前 景 。
[ 3 罗 善 瞀 . 路 车 类 型 和 结 构 形 式 [ ] 建 设 机 械 技 术 与 2 扫 J.
管 理 , 0 2 ( ) 3 —4 . 20 ,7 :9 3
摘 要 : 用 ANS S软 件 对 车 载 升 降 桅 杆 进 行 利 Y
文献 标识 码 : B 文 章 编 号 :0 1— 2 7 2 1 ) 0 0 3 0 1 0 2 5 (0 0 1 —0 7 — 4
Absr c : o a n l i fa v h ce—m o nt d t a t M d la a ysso e il u e lfi s s d ne b k ng u eoft n n e — itng ma ti o y ma i s he e gi e r i s fwa e ng o t r ANSYS,t e h ma t’S o 1 n t a s t p a ur l 1 f e e ce nd mod h pe r o d. heot r qu n i sa es a sa e f un On t h— e a r h nd, u e he smul tv oa nd ve ce— nd r t i a i e l ds a hil
车载式高空作业平台的结构设计
2013年机械设计专业本科毕业设计(论文)编号无锡太湖学院毕业设计(论文)题目:车载式高空作业平台的结构设计信机系机械工程及自动化专业学号:学生姓名:指导教师:2013年5月25日2013年机械设计专业本科毕业设计(论文)无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)车载式高空作业平台的结构设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目车载式高空作业平台的结构设计2、专题二、课题来源及选题依据高空作业平台是用来运送操作人员和工作设备到指定高度进行作业的特种车辆。
随着城市化进程的加快,市政建设、城市电力、装饰物等各种养护作业需要大量的高空作业装备。
高空作业平台作为一种系列化的工程机械设备,还广泛应用于船舶、建筑、消防、港口货运等行业。
近几年来,随着高空作业领域的不断扩展,对高空作业平台的需求量也日益增加,对高空作业平台的举升高度的要求也越来越高。
因此,对高空作业平台的工作可靠性、平稳性、安全性等要求也越来越高。
车载式高空作业平台是近年来应用比较广泛的高空作业平台,它由升降台和汽车配套改装而成的,采用H型液压支腿,能保证机器了升降的稳定和作业的安全。
适用于工作面广和幅度大的高空作业,产品具有作业范围大,持续作业时间长等优点,特别适合于野外路桥检修、路灯检修等工作环境。
三、本设计(论文或其他)应达到的要求:①了解高空作业平台的工作原理,以及近十年来的国内外研究发展状况;②完成车载式高空作业平台的总体方案设计及零部件的设计;③完成有关零部件的选型计算、结构强度校核;④完成高空作业车的液压油缸的选型设计;⑤掌握用积分法对结构进行强度、刚度校核的能力;四、接受任务学生:班姓名五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日本课题首先对国内外高空作业车的发展进行了概括,提出了发展中的不足,简要介绍了高空作业车的组成,然后对目前国内生产技术不完善的混合臂和伸缩臂式高空作业车的关键结构进行了设计,同时对工作斗调平技术和液压系统等关键技术进行了研究分析。
新型桅柱式升降台升降机构传动系统设计

的链条所受拉力的增量。若取打=1Td,则为卜-“心+ 尸。),其中每一级链条承受的增量最大,为(n-2) (G.+
转载请注明出处,谢谢。
升降机 ty70htvv
Di-1和导向柱Di-2的运动速度V-1和Vi-2之间存在如下关系 其中,V1=02=1缸杆,由之间也存在,因此计算摩擦力时, 可根据平
台升高来确定挠度对L的影响是否需要进行计算或忽略。 4方程求解设相邻2导向柱的重叠长度相等,且忽略导向 柱重叠处偏移量对L的影响,则各导
向柱之间的摩擦力相等,同时设所有链轮链条传动机构 的机械效率n相等,求解,工作平台升降速度增加(n- 1) v2,平台升降加速度和动荷系
平台3工作平台位于自行式底盘上方,与升降桷柱悬臂连 接。升降桷柱位于升降车前端中间位置,固定于自行式 底盘上。升降机构的工作原理如所示,
倒立桷柱式升降机构主要由多级矩形导向柱D、链轮链条 传动机构L、导向滑块W以及液压缸等组成,液压缸位于 升降机构中心,其外依次套有导向柱
Di、D2、D3、D4.相邻2导向柱之间、4个直角处的顶部和 底部分别安装有导向滑块W.液压缸缸筒底部和导向柱Di 固定于自行式底盘上,
统回油路接通,工作平台和升降机构的重力(若工作平 台有载荷时含载荷)通过链轮链条传动机构传递到液压 缸,将液压油压回油箱,使工作平台下降
到最低位置。2升降机构力学模型及受力分析2.1力学模型 及受力分析所示的升降机构传动力学模型如所示。设升 降机构共n节导向柱,取第i节导
向柱Di上的链轮链条传动机构L-1,为受力研究对象进行 分析,如所示。导向柱D;的摩擦力,F(i+iM为导向柱D; +i对导向柱D;的导
新产品新技术新型桅柱式升降台升降机构传动系统设计 总后建筑工程研究所辛涛王幼平浙江省衢州市交通建设 集团有限公司祝世清降台的不足,提出了
同步式电动升降桅杆结构设计

4.2 有限元分析法
电动升降桅杆承受风力后的变形分析属于固体力学分析,分析过程分为以下几个步骤:1)创建几何模型。建立几何实体模型前,需要对几何模型进行必要的简化,使简化后的模型,既能够保留主要的结构和力学特性,也要考虑提高有限元建模的效率和缩短分析计算的时间等。2)定义材料属性。对于有限元模型,需要定义模型的材料属性,在这里管材料为铝合金6063-T6,定义的材料属性见图3。3)给定约束和加载。按照图2桅杆展开状态承受风力的情况对几何模型加约束和负载。4)有限单元划分、后处理并生成结果。杆体承受风力后变形情况见图4。
2)同步式电动升降桅杆是所有丝母带动铝管同步升降,所以升降速度快,升降时间短。同步式电动升降桅杆的升降时间T=(L-l)i总[/S×(n-1)×1400],其中:L为电动杆展开高度;l为电动杆闭合高度;n为电动杆管节数;i总为减速装置总传动比;S为丝杠导程。
3)采用特制冷拉带四键的铝合金管,密度小精度高且刚性好。
5)电动机功率确定:P=。其中:M为丝杠驱动转矩,M=d2Ftan(λ+ρ1);η总为减速装置总效率;i总为减速装置总传动比。
4 抗风计算
桅杆抗风计算主要是计算出杆体展开后受风力作用而产生的偏移量,风力大小与风速和迎风面积有关,风力的计算公式:F风=CFqA。其中,CF为风力系数,q为不同风速产生的动压,A为迎风面积。根据实际调查,我国沿海地区q=v2/17,一般内陆地区q=v2/16,高原和高山地区q=v2/18~v2/19,桅杆风力计算中均取 q=v2/16(v为风速)。桅杆展开状态承受风力情况见图2。下面介绍2种计算桅杆承受风力后的偏移量的方法。叠加法;有限元分析法。
[2] 成大先.机械设计手册[M].北京.化学工业出版社,2011.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文件编号:RHD-QB-K7830 (安全管理范本系列)
编辑:XXXXXX
查核:XXXXXX
时间:XXXXXX
车载升降桅杆倒伏机构设计示范文本
车载升降桅杆倒伏机构设计示范文
本
操作指导:该安全管理文件为日常单位或公司为保证的工作、生产能够安全稳定地有效运转而制定的,并由相关人员在办理业务或操作时进行更好的判断与管理。
,其中条款可根据自己现实基础上调整,请仔细浏览后进行编辑与保存。
在通信、电子对抗、雷达系统等无线电领域,常常将天线设备安装在车载升降桅杆上。
一般情况下,升降桅杆竖直固定在运输方舱的侧壁,而有些情况下由于设备工作的需要,升降桅杆的闭合高度很高,安装在方舱侧壁会超过运输高度界线,这就有必要设计出一种使升降桅杆便于在运输状态和工作状态自如转换的安装机构来避免超高。
本文介绍的车载升降桅杆倒伏机构正是为了解决这一问题而设计的一种手动式升降桅杆翻转安装机构,使用它只需1人便可将闭合高度为3m以上的升降桅杆由舱后壁竖直工作状态
轻松转换为舱顶水平运输状态,且省时省力,安全可靠。
在通信、电子对抗、雷达系统等无线电领域,常常将天线设备安装在车载升降桅杆上。
一般情况下,升降桅杆竖直固定在运输方舱的侧壁,而有些情况下由于设备工作的需要,升降桅杆的闭合高度很高,安装在方舱侧壁会超过运输高度界线,这就有必要设计出一种使升降桅杆便于在运输状态和工作状态自如转换的安装机构来避免超高。
本文介绍的车载升降桅杆倒伏机构正是为了解决这一问题而设计的一种手动式升降桅杆翻转安装机构,使用它只需1人便可将闭合高度为3m以上的升降桅杆由舱后壁竖直工作状态轻松转换为舱顶水平运输状态,且省时省力,安全可靠。
设计目标
在部队野战备战或应急通讯等过程中,对设备的作业准备时间要求很苛刻,有时将机动架设时间缩小至几分钟,在车载升降桅杆倒伏机构设计过程中充分考虑了这一指标要求,同时兼顾升降桅杆的安装及使用条件,按照以下设计目标设计和验证。
2.1.由1人全程操作,操作时间不大于5分钟;
2.2.可安装的升降桅杆闭合高度不小于3米,重量不小于200公斤;
2.3.结构简单,安装方便;
2.4.操作便捷、省力、安全;
2.5.通用性强,结构稍作更改便可适用不同规格的桅杆安装。
结构组成与功能原理
3.1.总体结构与工作过程
倒伏机构主要由舱顶轨道、翻转架和固定架三大部分组成,舱顶轨道固定在方舱顶壁,固定架固定在方舱后壁,翻转架是倒伏机构的主要部分,与固定架上端的上固定座铰接。
利用倒伏机构将升降桅杆从舱顶水平运载状态转换成竖直工作状态是按照下面的过程操作的。
首先将升降桅杆向后移动一段距离,达到易于翻转的位置,然后将升降桅杆翻转竖起,实现角度转换,最后将升降桅杆下降到支座上,使其处于稳定的工作状态。
而将升降桅杆从竖直工作状态转换成舱顶水平运载状态时只需按上述过程反操作即可。
3.2.详细结构及功能原理
3.2.1.翻转架
翻转架结构组成如图2所示,翻转架可分成翻转部分和移动部分。
翻转部分主要包括翻转座和绞
线器,通过与固定架铰接可带动移动部分一起翻转;移动部分主要由行走轮、桅杆夹箍、导向杆、钢丝绳张紧轮、滑轮、钢丝绳和桅杆固定座等部分组成,移动部分可通过导向杆利用滑轮机构在翻转部分的翻转座导向套中往复移动。
滑轮机构可以说是整个倒伏机构的核心部分,它由绞线器、钢丝绳、滑轮和翻转座等部分组成。
首先由桅杆夹箍、导向杆和桅杆固定座形成一个固定框架,两个滑轮A安装在固定框架的桅杆夹箍一侧,两个滑轮B安装在桅杆固定座一侧,绞线器是固定在翻转座上的,当逆时针摇动绞线器使卷筒旋转时,卷筒便缠绕A段钢丝绳拉动滑轮A带动固定框架向右移动,同时卷筒释放B断钢丝绳配合框架右移;当顺时针摇动绞线器时,同理会使固定框架向左移动。
这里有两点需要说明:第一,翻转架的翻转部分翻转到任何角度都不影响滑轮机构
工作;第二,绞线器具有自锁性,当翻转架翻转到竖直状态时,安装在其上的升降桅杆不会因自重而使固定框架自由下降。
这就使操作者对升降桅杆何时移动、何时翻转提供了操作自由。
3.2.2.舱顶轨道和固定架
舱顶轨道和固定架可以说是翻转架的辅助结构。
舱顶轨道是由前端的固定销、中间的轨道和后端的挡板组成。
固定销是升降桅杆运输时的限位销,轨道是升降桅杆在舱顶前后移动时行走轮的滑道,挡板是升降桅杆平放时向后移动时的限位挡板。
固定架固定于舱后壁,结构组成如图4所示。
其上固定座和下固定座与舱体固定连接。
倒伏机构的翻转架与上固定座铰接,导向支座用于升降桅杆竖直上下移动时对导向杆提供滑动支承,下端的支座在解开锁销后可翻转90°,用于支承翻转架及桅杆,
其上的限位销用于限制桅杆底部侧向移动。
使用方法与安装要点
4.1.使用方法
此升降桅杆倒伏机构的使用方法十分简单,操作者首先在方舱下将后壁固定架下部的支座翻转90°,为升降桅杆下降做准备,然后登上舱顶摇动绞线器手摇柄,使升降桅杆后退至舱顶轨道后端的挡板,再将升降桅杆连同翻转架向后翻转90°竖立,最后继续摇动绞线器手摇柄使桅杆下降到支座上,确保支座上的限位销已插入到桅杆固定座的底孔中,便可使用桅杆了。
相反,欲将升降桅杆恢复到舱顶平放的运输状态,首先在舱顶摇动绞线器手摇柄使桅杆上升,当桅杆固定座升至接触到固定架的导向杆支座时,便可将桅杆翻转到舱顶水平状态,继续摇动摇柄,直至翻转
架到达舱顶轨道前端极限位置停止。
4.2.安装要点
4.2.1.在翻转架上的钢丝绳安装好后,需调节其前端的钢丝绳张紧轮,使钢丝绳处于相对绷紧状态,以避免钢丝绳缠绕卷筒上时出现乱绳现象。
4.2.2.在安装舱顶轨道后端的挡板前,在舱顶先将升降桅杆向后摇至重心刚好在翻转轴上,然后再反方向将升降桅杆向前摇动100mm,此位置作为桅杆的翻转位置,此时将挡板固定在舱顶轨道上,这样操作者在翻转桅杆时既省力,又确保桅杆不会自动翻下去。
4.2.3.按照(2)安装完挡板后,将桅杆翻转成竖立状态,然后在固定架上确定导向杆支座的位置,以此位置作为桅杆向舱顶翻转前的上升极限位置。
主要设计计算
根据升降桅杆闭合高度3米、重
G1=200kg,可确定翻转架移动部分重为G2=50 kg,移动全程为L=1800mm。
当桅杆竖直上下移动时,钢丝绳所受拉力最大。
采用动滑轮结构省一半力,效率为η1=0.9,
则钢丝绳拉力F=0.5×(G1+G2)×
g/0.9=1389N,因此可选直径为4mm,最小破坏拉力为8kN的钢丝绳。
绞线器速比为i=1:10,卷筒半径为
R=45mm,效率η2=0.8,因此手摇力矩T=F×R×i/η2=7.8N.m,符合轻便省力。
桅杆移动全程时,卷筒转动圈数N1=2×
L/(2πR)=13圈,因此得手摇圈数N= N1×i=130圈,按照一分钟能摇40圈计算,可得需要手摇时间
执行方案/ EXECUTION PLAN 编号:RHD-QB-K7830 t=130/40=3.25min,加上其他的操作时间,可以满足操作时间不大于5分钟的设计目标。
经过设计、生产和试验验证,此产品各项指标均满足了既定的设计目标,又易于改型设计,满足通用性要求,而且无需使用电力,环境适应性强,成本低廉,操作方便,安全可靠,可广泛投入到军用或民用市场中使用。
这里写地址或者组织名称
Write Your Company Address Or Phone Number Here
第2页。