机械工程学报格式模板
机械工程学报论文格式模板

Received September 8, 2008; revised January 18, 2009; accepted February 23, 2009; published electronically March 6, 2009
Abstract: A particular emphasis is put on a novel wearable exoskeleton arm, ZJUESA, with 6 degrees of freedom, 字号 8 磅,段后回车换行 1 次 which is used for the robot teleoperation with the force-feedback in the unknown environment. In this external structure mechanism, the 3-revolution-prismatic-spherical (3RPS) parallel mechanism is devised from the concept of the human upper-limb anatomy and applied for the shoulder 3-DOF joint. Meanwhile, the orthogonal experiment design method is introduced for its optimal design. Aiming at enhancing the performance of teleoperation, the force feedback is employed by the pneumatic system on ZJUESA to produce the vivid feeling in addition to the soft control interface. Due to the compressibility and nonlinearity of the pneumatic force feedbacy controller for the precise force control is proposed and realized based on the Mega8 microcontroller units as the units 字号 9 磅,段后回车换行 1 次 feedback, the of the distributed control system on ZJUESA. With the results of several experiments for master-slave control with force feasibility of ZJUESA system and the effect of its hybrid fuzzy controller are verified. Key words: exoskeleton arm, teleoperation, pneumatic force-feedback, hybrid fuzzy control 一级标题字号 12 磅, 段前空 1 行,段后回车换行 1 次 字号 9 磅,段后
机械工程学报格式模板
机械工程学报格式模板
本文在XX学科领域,研究了XX问题,开展了XX研究。
文章共分为五部分:第一部分介绍了背景知识;第二部分是实验数据分析;第三部分是理论分析;第四部分是结论总结;第五部分是未来研究方向。
实验数据分析部分,本文使用了XX方法,结合XX实验,分析了XX 问题,并得出了一些结论,证明了XX理论。
理论分析部分,本文结合前文研究结果和实证数据,运用XX方法对XX问题进行了详细分析,得出了XX结论。
结论总结部分,本文综合前文分析研究结果,对XX问题进行了详细研究,得出了XX结论。
未来研究方向部分,在基础研究的基础上,结合XX研究方法,将从XX角度继续研究XX问题,以实现XX目标。
本文通过研究XX问题,对XX学科的研究有了一定的推动作用,为今后用XX技术解决相关问题提供了理论和技术支持。
中国机械工程学报(英文版)论文模板
ZHANG Jiafan1, 3, *, FU Hailun2, DONG Yiming1, ZHANG Yu1, YANG Canjun112 Zhejiang Province Instituteof Metrology,Hangzhou 310027, China3Abstract:and high head have been developed overseas. However, low efficiency and large size are the common disadvantages for the magnetic drive pump. In order to study the performance of high-speed magnetic drive pump, FLUENT is used to simulate the inner flow field of magnetic drive pumps with different rotate speeds, and get velocity and pressure distributions of inner flow field. According to analysis the changes of velocity and pressure to ensure the stable operation of pump and avoid cavitation. Based on the analysis of velocity and pressure, this paper presents the pump efficiency of magnetic drive pumps with different rotated speeds by calculating the power loss in impeller and volute, hydraulic loss, volumetric loss, mechanical loss and discussing the different reasons of power loss between theKey words:1At first look at modern society, more and more robotsand automated devices are coming into our life and servemechatronic devices replacelower levels, essentiallylevels just as the term humanwhich is coined byGOERTZ,et al[2]widely developed in the fields of robothaptic interface to enhance theoperator, also in the excitingplanning, personnel training, and50305035), National Hi-tech Research andChina(863 Program, Grant No. ##), BeijingFoundation of China((Grant No. ##), and ZhejiangScience Foundation of China((Grant No. ##)DUBEY, et al[3], to incorporatesensor and model into humancontrolled teleoperation systems. In their approach, thehuman operator was retained at all phases of the operation,and was assisted by adjusting system parameters whichredundant robotic arms[4]. In recent work[5–6],signal has been used to control thearm and many new concepts were applied in–10]. Several researchers from Koreaand Technology(KIST) introduced[11–12].new exoskeleton-type master arm, inbrakes with the torque sensor beamsreflection[14]. Likewise, the authorsout a 2-port network model to describe the bilateral[15–17].this research, a wearable exoskeleton arm, ZJUESA,system is designed and ateleoperation control system isY ZHANG Jiafan, et al: Novel 6-DOF Wearable Exoskeleton Arm with Pneumatic Force-Feedback for Bilateral Teleoperation·2·explained. This system includes three main levels: ① supervisor giving the command through the exoskeleton arm in safe zone with the operator interface; ② slave-robot working in hazardous zone; ③ data transmission between supervisor-master and master-slave through the Internet or Ethernet. In section 2, by using the orthogonal experiment design method, the design foundation of ZJUESA and its optimal design are presented. Then in section 3, we describe a novel hybrid fuzzy control system for the force feedback on ZJUESA. Consequently, the force feedback control simulations and experiment results analysis are presented in section 4, followed by discussions and conclusions.2 Configuration of the Exoskeleton ArmSystemThe master-slave control is widely employed in the robotmanipulation. In most cases, the joystick or the keyboard isthe routine input device for the robot master-slave controlsystem. The system presented in this paper is shown in Fig. 1.In the system the exoskeleton arm —ZJUESA replaces the joystick as the command generator. It is an externalstructure mechanism, which can be worn by the operator, and can transfer the motions of human upper arm to slave manipulator position-control-commands through the Internet or Ethernet between the master and slave computers. With this information, the slave manipulator mimics the motion of the operator. At the same time, the force-feedback signals, detected by the 6-axis force/torque sensor on the slave robot arm end effector, are sent back to indicate the pneumatic actuators for the force-feedback on ZJUESA to realize the bilateral teleoperation.Since ZJUESA is designed by following the physiological parameters of the human upper-limb, with such a device the human operator can control the manipulator more comfortably and intuitively than the system with the joystick or the keyboard input.3 Design of the Exoskeleton ArmWhat we desire is an arm exoskeleton which is capable of following motions of the human upper-limb accurately and supplying the human upper-limb with proper force feedback if needed. In order to achieve an ideal controlling performance, we have to examine the structure of the human upper-limb.3.1 Anatomy of human upper-limb3.1.1 Upper-limbRecently, various models of the human upper-limbanatomy have been derived. The biomechanical models of the arm that stand for precise anatomical models including muscles, tendons and bones are too complex to be utilized in mechanical design of an anthropomorphic robot arm. From the view of the mechanism, we should set up a morepracticable model for easy and effective realization.Fig. 2 introduces the configuration of human upper-limband its equivalent mechanical model, which is a 7-DOFstructure, including 3 degrees of freedom for shoulder(flexion/extension, abduction/adduction and rotation), 1 degree of freedom for elbow (flexion/extension) and 3 degrees of freedom for wrist (flexion/ extension, abduction/adduction and rotation)[18]. The details about the motion characteristics of these skeletal can be obtained in Refs. [18-20]. Compared to the mechanical model, the shoulder and wrist can be considered as spherical joints and the elbow as a revolution joint. It is a good approximate model for the human arm, and the base for the design and construction of exoskeleton arm-ZJUESA.Fig. 2. Configuration of human upper limband its equivalent mechanical model3.2 Mechanism of the exoskeleton armBecause the goal of this device is to follow motions of the human arm accurately for teleoperation, ZJUESA ought to make the best of motion scope of the human upper-limb and limit it as little as possible. A flexible structure with the same or similar configuration of human upper-limb is an ideal choice. Based on the anatomy of human upper-limb, the joint motion originates from extension or flexion of the图题字号9磅,行距固定值11磅,段前0.3行,段后回车换行1次;图中字号8磅 图题后遇标题时,段后回车换行2次 图前段落,段后回车换行1次双码页面页眉字号8磅,单倍行距,段后1.2磅三级标题字号10磅,斜体,段前0.5行 二级标题字号10磅图片及表格要求: 图表类型 分辨率 灰度 < 150 | > 225 彩色 < 150 | > 225位图 < 600 | > 900CHINESE JOURNAL OF MECHANICAL ENGINEERING·3·muscle and ligament with each other to generate torque around the bones. Compared with the serial mechanism, the movements of the parallel mechanism are driven by the prismatics, which act analogically to the human muscles and ligament. Besides, using the parallel mechanism not only realizes the multi-DOF joint for a compact structure and ligament. Besides, using the parallel mechanism not only realizes the multi-DOF joint for a compact structure of human upper-limb. The 3RPS parallel mechanism is one of the simplest mechanisms. Fig. 3 explains the principle of the 3RPS parallel mechanism. KIM, et al [11], introduced it into the KIST design. Here we follow this concept. The two revolution degrees of freedom embodied in the 3RPS are for flexion/extension, abduction/adduction at shoulder. Its third translation degree of freedom along z axis can be used for the dimension adjustment of ZJUESA for different operators. The prismatic joints are embodied by pneumatic actuators, which are deployed to supply force reflective capability. Also displacement sensors are located along with the pneumatic actuators and the ring-shaped joints to measure their linear and angular displacements. At elbow, a crank-slide mechanism composed of a cylinder and links is utilized for flexion/extension. At wrist, since the abduction/ adduction movement is so limited and can be indirectly reached by combination of the other joints, we simplify the configuration by ignoring the effect of this movement. As shown in Fig. 4, the additional ring the same as that at shoulder for the elbow rotation. Thus our exoskeletonarm-ZJUESA has 6 degrees of freedom totally.Fig. 3. 3RPS parallel mechanismFig. 4. Prototype of the exoskeleton arm-ZJUESA 3.3 Optimization design of ZJUESAAs nentioned above, the best design is to makethe workspace of ZJUESA as fully cover the scope of the human upper-limb motion as possible. We employ the 3RPS parallel mechanism for the shoulder, whose workspace mainly influences the workspace of ZJUESA. The optimal design of 3RPS parallel mechanism for the shoulder is the key point of ZJUESA optimal design. However, it is a designing problem with multi-factors, saying the displacement of the prismatics (factor A ), circumradius ratio of the upper and lower platforms (factor B ), initial length of the prismatics (factor C ), and their coupling parameters (factor A *B , A *C and B *C ) (Table 1) and multi-targets, namely, its workspace, weight, size. So,we use the orthogonal experiment design method with foregoing 6 key factors and Eq. (1) gives the expressionof the optimal target function of this problem: 0, , x r Q F L R θθ⎛⎫=- ⎪⎝⎭, (1)where L 0 is the initial length of the prismatics, R is the circumradius of the lower base in 3RPS mechanism, r is thecircumradius of the upper base in 3RPS mechanism, θ is the expected reachable angle around axis, and xθ is thereachable angle around axis.Table 1. Factors and their levels mm Level rank A B C A *B A *C B *C1 60 0.5 150 - - -2 80 0.438 160 - - -3100 0.389 170 - - - 4 --180---The orthogonal experiment design is outlined because of the ease with which levels can be allocated and its efficiency. The concept of orthogonal experiment design is discussed in Ref. [21] to obtain parameters optimization, finding the setting for each of a number of input parameters that optimizes the output(s) of the design. Orthogonal experiment design allows a decrease in the number of experiments performed with only slightly less accuracy than full factor testing. The orthogonal experiment design concept can be used for any complicated system being investigated, regardless of the nature of the system. During the optimization, all variables, even continuous ones, are thought of discrete “levels ”. In an orthogonal experiment design, the levels of each factors are allocated by using an orthogonal array [22]. By discretizing variables in this way, a design of experiments is advantageous in that it can reduce the number of combinations and is resistant to noise and conclusions valid over the entire region spanned by the control factors and their setting.Table 2 describes an orthogonal experiment design array for 6 key factors [23]. In this array the first column implies the number of the experiments and factors A , B , C , A *B ,表题字号9磅,字体加粗,段后0.3行表中字号8磅,行距固定值11磅,段后回车换行1次数学式前段落,段后回车换行1次表前段落,段后回车换行1次 单码页面页眉字号10.5磅,单倍行距,段后1.2磅 图序与图题间空两格Table 后空一格,表序与表题间空两格缩写点后空一格页码文字周围的图文框宽 1.1 cm ,高0.4 cm ,相对于“页面”水平距离18 cm ,相对于“段落”垂直距离0.4 cm另行排的数学式必须居中,单倍行距,段后回车换行1次Y ZHANG Jiafan, et al: Novel 6-DOF Wearable Exoskeleton Arm with Pneumatic Force-Feedback for Bilateral Teleoperation·4·A *B and B *C are arbitrarily assigned to columnsrespectively. From Table 2, 36 trials of experiments are needed, with the level of each factor for each trial-runindicated in the array. The elements represent the levels of each factors. The vertical columns represent the experimental factors to be studied using that array. Each of the columns contains several assignments at each level for the corresponding factors. The levels of the latter three factors are dependent on those of the former three factors. The elements of the column IV , namely factor A *B , are determined by the elements in the columns I, II, and elements of column V , factor A *C , has the relationship with the elements of columns I, III, and the column VI, factor B *C , lies on the columns II, III.Table 2. Orthogonal experiment design array L36for 6 key factorsExperiment No.A B C A *B A *C B *C Result Q 1 1 1 1 1 1 1 Y 1 2 1 1 2 1 2 2 Y 2 3 1 1 3 1 3 3 Y 3 4 1 1 4 1 4 4 Y 4 5 1 2 1 2 1 5 Y 5 6 1 2 2 2 2 6 Y 6 33 3 3 1 9 9 9 Y 33 34 3 3 2 9 10 10 Y 34 35 3 3 3 9 11 11 Y 35 3633491212Y 36The relation between column IV and columns I, II is that: if level of A is n and level of B is m , the level of A *B is 3(n –1)+m , where n=1, 2, 3 and m=1, 2, 3. All the cases can be expressed as follows:(1, 1)→1 (1, 2)→2 (1, 3)→3; (2, 1)→4 (2, 2)→5 (2, 3)→6; (3, 1)→7 (3, 2)→8 (3, 3)→9.The first element in the bracket represents the corresponding level of factor A in Table 1 and the latter means the corresponding level of the factor B . Factor A *B has totally 9 levels, as factor A and factor B have 3 levels, respectively.Likewise, the relation between column V and columns I, III is(1, 1)→1 (1, 2)→2 (1, 3)→3 (1, 4)→4; (2, 1)→5 (2, 2)→6 (2, 3)→7 (2, 4)→8; (3, 1)→9 (3, 2)→10 (3, 3)→11 (3, 4)→12.Also the relation between column VI and columns II, III is(1, 1)→1 (1, 2)→2 (1, 3)→3 (1, 4)→4; (2, 1)→5 (2, 2)→6 (2, 3)→7 (2, 4)→8;(3, 1)→9 (3, 2)→10 (3, 3)→11 (3, 4)→12.The optimal design is carried out according to the first three columns:1211121235*36*1/91/91/90000000000000,0000001/3000000001/3A A B C B C I Y I Y I Y I Y ⎛⎫⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎝⎭⎝⎭⎝⎭ (2)max{}min{}i ij ij K I I =-, (3) where i = A , B , C , A *B , A *C , B *C ; j is the number of i rank. By calculation of the 3RPS parallel mechanism [24–35], the relationship between the target Q and each factor can be obtained, as shown inFig. 5.Fig. 5. Relation between levels of factors and QAccording to the plots in Fig. 5, we can get the superiority and the degree of the influence (sensitivity) of each design factor. The factor with bigger extreme difference K i , as expressed in Eq. (3) has more influence on Q . In this case, it can be concluded that the sensitivity of the factors A *B and A *C are high and factors B *C and C have weak influence, since K A *B and K A *C are much bigger than K B *C and K C . And the set A 3B 1, A 2C 1, A 2, B 1, C 1, B 1C 1 are the best combination of each factor levels. But there is a conflict with former 3 items in such a set. As their K i have little differences between each other, the middle course is chosen. After compromising, we take the level 2 of factor A , the level 1 of factor B and the level 1 of factor C , namely d =80 mm, r /R =0.5, L 0=150 mm [32].It is interesting to know how good the results derived from the above 36 trials are, when compared with all other possible combinations. Because of its mutual balance of orthogonal arrays, this performance ratio can be guaranteed by the theorem in non-parametric statistics [13]. It predicts双数页码周围的图文框,相对于“页面”水平距离1.8 cm量名称与量符号间空一格缩写点与后续文字间空一格CHINESE JOURNAL OF MECHANICAL ENGINEERING·5·that this optimization is better than 97.29% of alternatives. Combined with the kinematics and dynamics simulation of the 3RPS parallel mechanism and ZJUESA with chosen design parameters by ADAMS, we perform the optimal design. Table 3 indicates the joint range and joint torque of each joint on ZJUESA. It is apparent that ZJUESA can almost cover the workspace of human upper-limb well so that it can follow the motion of human operation upper-limb with little constrain, as shown in Fig. 6.Table 3. Joint ranges and joint torques for each jointon ZJUESAJoint on ZJUESA Joint range θ/(°) Joint torque T /(N ·m) Joint density ρm / (kg ·m –3)Flexion/extension(shoulder) -60-60 36 - Abduction/adduction -50-60 36 - Rotation(shoulder) -20-90 18 - Flexion/extension(elbow) 0-90 28 - Rotation(wrist) -20-90 13 - Flexion/extension(wrist) 0-6028 - Abduction/ adduction(wrist)-Fig. 6. Motion of exoskeleton arm following the operator4 Hybrid Fuzzy-Controller for the ForceFeedback On ZjuesaIn master-slave manipulation, besides the visual feedback and man-machine soft interface, the force feedback is another good choice to enhance the control performance. If the slave faithfully reproduces the master motions and the master accurately feels the slave forces, the operator can experience the same interaction with the teleoperated tasks, as would the slave. In this way the teleoperation becomes more intuitive.In our bilateral teleoperation system with ZJUESA, a 6 axis force/torque sensor is mounted on the end effector of the slave manipulator and detects the force and torque acting on the end effector during performing the work. This information is transferred to the master site in real time.With dynamic calculation, the references of the generatingforce on actuators of ZJUESA are obtained. Hereafter, the feeling can be reproduced by means of the pneumatic system.Eq. (4) expresses the relation between the force and torque on the end effector and the torques generating on the joints: T =τJ F ,(4)where F —Force and torque on the end effector,⎛⎫= ⎪⎝⎭f F n ,τ —Torque on each joint, T 126()τττ=τ,J —Jacobian matrix of ZJUESA.By dividing the force arm, it is easy to get to the generating force on the joints, such as shoulder ring, elbow, wrist ring and wrist, as explained by Eq. (5):()TT345645673456f f f f a a a a ττττ⎛⎫== ⎪⎝⎭f , (5)where a i (i =3, 4, 5, 6) is the force arm of the shoulder ring, elbow, elbow ring and wrist joints, respectively.As for the generating force of the prismatics on the 3RPS parallel mechanism, it can be calculated as follows [35]:13RPS 23RPS 3 f F f f f ⎛⎫⎛⎫ ⎪= ⎪ ⎪⎝⎭ ⎪⎝⎭τG f , (6)where f F G —Jacobian matrix of 3RPS parallel mechanism,3RPS τ—Torques on 3RPS parallel mechanism,()T3RPS 12ττ=τ,f 3RPS —Force on 3RPS parallel mechanism.Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA. Fig. 7 explains the scheme of the pneumatic cylinder-valve system for the force feedback.Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA. Fig. 7 explains the scheme of the pneumatic cylinder-valve system for the force feedback. Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA. Fig. 7 explains the scheme of the pneumatic cylinder-valve system for the force feedback. Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA. Fig. 7 explains the scheme of the pneumatic cylinder-valve system for the force feedback. Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA. Fig. 7 explains the scheme of the pneumatic数学式下方的解释语及其他数学式,各行间单倍行距Y ZHANG Jiafan, et al: Novel 6-DOF Wearable Exoskeleton Arm with Pneumatic Force-Feedback for Bilateral Teleoperation ·6·cylinder-valve system for the force feedback. Therefore, with Eqs. (5), (6), the total seven force references are obtained for the pneumatic system on ZJUESA.Fig. 7. Scheme of the pneumatic cylinder-valve systemp1, v1, a1—Pressure, volume and section area of cylinder chamber 1p2, v2, a2—Pressure, volume and section area of cylinder chamber 2 m p—Mass of the pistona r—Section area of rodm L —Mass of loadThe high-speed on-off valves, working as the command components in the system, are controlled by the pulse width modification(PWM) signals from the control units, respectively. Rather than the proportional or servo valve, this is an inexpensive and widely used method in the application of position and force control in the pneumatic system [23–28]. To simplify the control algorithm, there is just one valve on work at any moment. For instance, when a leftward force is wanted, the valve V1 works and valve V2 is out of work. Under this case, we can control the pressure p1 in chamber 1 by modifying the PWM signals. Chamber 2 connects to the atmosphere at that time and the pressure p2 inside the chamber 2 of cylinder is absolutely ambient pressure, and vice versa. At each port of the cylinder, there is a pressure sensor to detect the pressure value inside the chamber for the close-loop control. And the throttle valves are equipped for limiting the flow out of the chamber to reduce piston vibrations. In our previous work, we gave out the specific mathematic models of the system, including pneumatic cylinder, high-speed on-off valve and connecting tube[33].However, the pneumatic system is not usually a well linear control system, because of the air compressibility and its effect on the flow line. Also the highly nonlinear flow brings troubles into the control. The conventional controllers are often developed via simple models of the plant behavior that satisfy the necessary assumptions, via the specially tuning of relatively simple linear or nonlinear controllers. As a result, for pressure or force control in such a nonlinear system, especially in which the chamber pressure vibrates rapidly, the conventional control method can hardly have a good performance.Fortunately, the introduction of the hybrid control method mentioned, gives out a solution to this problem. But the traditional design of the hybrid controller is always complicated and only available to the proportion or servo valve system. In our system, we figured out a kind of novel hybrid fuzzy control strategy for the high-speed on-off valves, which is much simpler and can be realized by micro control units(MCUs) in the contributed architecture. This strategy is composed of two main parts: a fuzzy controller and a bang-bang controller. The fuzzy controller provides a formal methodology for representing, manipulating, and implementing a person’s heuristic knowledge about how to control a system. It can be regarded as an artificial decision maker that operates in a closed-loop system in real time and can help the system to get the control information either from a human decision maker who performs the control task or by self-study, while the bang-bang controller is added to drive the response of the system much more quickly.Fig. 8 shows the concept of the proposed hybrid fuzzy controller. The concept of multimode switching is applied to activate either the bang-bang controller or the fuzzy controller mode.Fig. 8. Concept of the hybrid fuzzy controllerBang-bang control is applied when the actual output is far away from reference value. In this mode, fast tracking of the output is implemented. The fuzzy controller is activated when the output is near the set point, which needs accuracy control.In the fuzzy-control mode, we use pressure error ref actual()()()e t P t P t=-and its change ()e t as the input variables on which to make decisions. On the other hand, the width of the high voltage in one PWM period is denoted as the output of the controller.As mentioned above, the PC on master site works as the supervisor for real-time displaying, kinematics calculation and exchanges the control data with the slave computer and so on. For the sake of reducing the burden of the master PC, the distributed control system is introduced. Each control unit contains a Mega8 MCU of A TMEL Inc., working as a hybrid fuzzy-controller for each cylinder respectively, and forms a pressure closed-loop control. The controller samples the pressure in chamber with 20 kHz sampling rate当图题后面有注释时,图题前、后各0.3行注释文字字号8磅,单倍行距,最后一行段后回车换行1次CHINESE JOURNAL OF MECHANICAL ENGINEERING·7·by the in-built analog- digital converters. These controllers keep in contact or get the differential pressure signals from the master PC through RS232, as depicted in Fig. 9. In this mode, fast tracking of the output is implemented.Fig. 9. Distributed control system of the master arm5 Force Feedback ExperimentsFig. 10 gives out the set up of the force feedback experiments. The system includes the soft interface, data acquisition, Mega8 MCU experiment board, on-off valves, sensors of displacement and pressure, and the oscilloscope. We chose the cylinder DSNU-10-40-P produced by FESTO Inc. The soft signal generator and data acquisition are both designed in the LabVIEW, with which users may take advantage of its powerful graphical programming capability. Compared with other conventional programming environments, the most obvious difference is that LabVIEW is a graphical compiler that uses icons instead of lines of text. Additionally, LabVIEW has a large set of built-in mathematical functions and graphical data visualization and data input objects typically found in data acquisition and analysis applications.Fig. 10. Set-up of force feedback experimentThe plots in Fig. 11 give out experimental results of the chamber pressure outputs with step input signals on one joint. While at frequencies higher than 80 Hz, force is sensed through the operator’s joint, muscle and tendon receptors, and the operator is unable to respond to, and low amplitude disturbances at these frequencies. We remove reflected force signals above 80Hz band by fast Fourier transfer (FFT) and get the smoothed curve in the plots. One is obtained by using hybrid control strategy and another is obtained by using traditional fuzzy controller without bang-bang controller. Although these two curves both track the reference well with very good amplitude match (less than 5% error) and a few milliseconds misalignment in the time profile, by comparing these two curves, it can be found that the adjust time of the curve with hybrid control strategy is less than 0.03 s, which is much less than 0.05 s of other with traditional fuzzy controller. It proves effect of the hybrid control strategy.Fig. 11. Experimental results with a step signalFig. 12 shows the results of tracking a sinusoidal commander. This experiment…up to 5 Hz frequency sinusoidal command well.Fig. 12. Experiment results for sinusoidal pressure commandsY ZHANG Jiafan, et al: Novel 6-DOF Wearable Exoskeleton Arm with Pneumatic Force-Feedback for Bilateral Teleoperation ·8·After then, another two experiments are carried out torealize the bilateral teleoperation with simple motion, inwhich the slave manipulator is controlled for the shoulderabduction/ adduction(the movement of a bone away/toward the midline in the frontal plane) and extension/flexion of elbow(the movement in the sagittal plane) by theteleoperation with ZJUESA.In the first experiment, the operator performs theshoulder abduction/adduction movement with ZJUESA,when the slave robot follows and holds up the load. Withthe force feedback on ZJUESA, the operator has feeling asif he holds the load directly without the mechanicalstructure, as shown in Fig. 13. Plots in Figs. 14, 15 showthe torque and force on each joint on ZJUESA during theshoulder abduction/adduction movement from 45° to 90°(in the frontal plane) with 5 kg load. There are some remarks. In plots of Fig. 14 shoulder 3RPS-x means the torque around x-axis of 3RPS mechanism at shoulder and the same to shoulder 3RPS-y. Shoulder ring, elbow, wrist ring and wrist represent the torques on these joints, respectively. The characters shoulder 3RPS-1, shoulder 3RPS-2 and shoulder 3RPS-3 in Fig. 15 represent corresponding force on the cylinders on 3RPS parallel mechanism (referring to Fig. 3) with length L1, L2 and L3, respectively.Fig. 13. Shoulder abduction/adduction teleoperation Fig. 14. Torques on the joints of the shoulderabduction/adduction for 5 kg load liftingFig. 15. Force feedback on the cylinders of the shoulder abduction/adduction for 5 kg load liftingThe operator teleoperates the slave manipulator with force feedback as if he performs for lifting a dumbbell or raising package in daily life(Fig. 16). Fig. 17 shows the moment on each joint during the process for producing the feeling of lifting a 10 kg dumbbell. Fig. 18 depicts the force output of every pneumatic cylinder on ZJUESA.Fig. 16. Extension/flexion for elbow teleoperationFig. 17. Torques on the joints of the elbowextension/flexion for 10 kg load liftingAll these results of experiments demonstrate the effect of ZJUESA system. ZJUESA performs well by following the motions of human upper-limb with little constrain and the pneumatic force feedback system supplies a proper force feedback tracking the reference well.。
《机械工程学报》论文模板

基于神经网络的双层辉光离子渗金属工艺预测模型(二号黑体)*董宏林1闫颖鑫2王科俊2段广仁2(四号仿宋)(1. 南京理工大学计算机科学与技术学院南京210094;(五号宋体)2. 哈尔滨工业大学航天学院哈尔滨150001)摘要(小五黑体):将人工神经网络理论和算法应用于双层辉光离子渗金属工艺的研究,在对网络进行训练的基础上,建立了双层辉光离子渗金属工艺与渗层表面成分和元素总质量分数、渗层厚度和吸收率之间的数学模型,试验结果与计算结果十分吻合。
(小五宋体)关键词(小五黑体):双层辉光人工神经网络预测模型(小五宋体)中图分类号(小五黑体):TG156(小五Times New Roman)Research on ANN-based Prediction Model Used to Double Glow PlasmaSurface Alloying Processing(小三)XXX(姓大写) Xxxxxx XXX Xxxxxx(小四)(1.College of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100081;2.School of Mechanical Engineering, Shanghai Jiaotong University, Shanghai 200030 )(五号)Abstract(小五黑体):The theory and the algorithm of the artificial neural network are applied in the research of the technique and the composition, the gross mass fraction of element, the thickness of surface alloying layer as well as the absorption rate is built. The calculation results are in good agreement with the experimental results.(小五)Key words(小五黑体):Double glow Artificial neural network Prediction model0 前言(四号宋体)(五号宋体)双层辉光离子渗金属技术是我国在国内外都获得专利的一项等离子表面冶金新技术[1-4],它可以在普通材料表面形成具有特殊物理、化学性质的表面合金层。
自然基金申请书撰写 机械工程学报
自然基金申请书撰写一、申请人基本信息1. 尊称:XXX2. 单位:XXX大学机械工程学院3. 职称:XXX4. 学位等级:博士二、研究背景1. 自然基金项目编号:XXXXXX2. 研究方向:机械工程3. 研究内容:本研究主要探讨XXX方面的问题,包括XXX、XXX、XXX等方面的研究。
三、研究意义1. 本研究的意义及可能带来的影响:XXXXX四、研究内容及技术路线1. 研究内容:本研究将主要从XXX、XXX、XXX等方面开展具体研究工作。
2. 技术路线:在研究过程中,将采用XXX、XXX、XXX等方法和手段。
五、研究目标及创新点1. 研究目标:本研究将从XXX方面提出XXX目标,并力求达成。
2. 创新点:在原有研究成果的基础上,本研究将提出XXX方面的创新点,并力求取得创新性的研究成果。
六、预期成果1. 本研究预计将取得XXX方面的研究成果,包括XXX、XXX及XXX。
2. 预期成果的应用价值和社会效益:XXXXX七、研究进度及分工1. 研究进度安排:本研究将按照XXX的时间节点进行研究工作。
2. 研究分工:本研究将由XXX负责XXX工作,由XXX负责XXX工作。
八、经费预算1. 本研究预计所需经费:XXXXX元。
2. 经费使用计划:XXXXX元用于XXX方面的支出,XXXXX元用于XXX方面的支出。
九、参考文献1. 本申请书所引用的参考文献:XXX2. 参考文献的相关性及权威性:XXXXX十、结语1. 通过本申请,希望能够得到自然基金的资助,以便开展本研究工作,取得更多的研究成果并促进学科的发展。
2. 通联方式:XXX3. 申请人签名:XXX以上为本申请书的内容及相关信息,希望能够得到您的认可和支持,谢谢!经过多次修改和审阅,以下是续写和扩展申请书的新内容:十一、研究背景:机械工程是一门应用学科,常常与其他工程领域相互交叉,涉及领域广泛,如设计、制造、材料、机器人、汽车等。
机械工程的发展对国家的制造业和科技发展起到至关重要的作用。
机械工程学报论文排版要求

机械工程学报论文排版要求
1.纸张格式:在A4纸上撰写,并保留一个边距,上、下、左、右四
个边距长度分别为15毫米。
2.字体格式:正文使用宋体字,字号为小四号(12号),行间距为
固定值24磅。
标题使用黑体字,一级标题为三号加粗字,二级标题为四
号加粗字。
4.图表编排:图表需与正文相符,采用阿拉伯数字编号,并且需要有
相应的标题以及引用文献。
图表的文字需清晰可读,建议使用矢量图形格式。
6.公式编排:公式需单独居中排列,并用阿拉伯数字进行编号,格式
如(1)、(2)等。
公式中的各个符号需有详细的注释与解释。
7.插图图片:插图图片需要具有清晰的解释说明,并用中文进行编号。
若使用表格形式呈现数据,需格外注意表格的清晰度以及表头的文字。
8.对照表格:对照表格中的数值,若有指标较大的差别,需要在表中
使用颜色区分或使用星号(*)标注。
总之,机械工程学报对论文排版有一定的要求,包括纸张格式、字体
格式、页面格式、图表编排、引用格式、公式编排、插图图片以及对照表
格等方面。
合理遵循以上要求可以使论文具有较高的质量,并提高论文在
该期刊中的发表概率。
机械工程学报的latex模板

机械工程学报的latex模板《机械工程学报》是一本著名的、以机械工程学为主题的学术期刊。
在本文中,我们将逐步介绍如何使用LaTeX模板来撰写一篇符合《机械工程学报》要求的论文。
1. 下载LaTeX模板:首先,我们需要从相应的网站上下载《机械工程学报》的LaTeX模板。
可以在期刊的官方网站或其他相关网站上找到这个模板文件,并将其下载到我们的计算机上。
2. 安装LaTeX系统:安装LaTeX系统是使用LaTeX模板的先决条件。
常见的LaTeX系统有TeX Live和MiKTeX。
可以从它们的官方网站下载相应的安装程序,并按照提示进行安装。
3. 创建新的LaTeX文档:使用LaTeX模板撰写论文前,需要创建一个新的LaTeX文档。
在文本编辑器中打开这个新的文档,并将以下代码粘贴到文档开头:latex\documentclass{jmecia}这个代码行告诉LaTeX使用《机械工程学报》的模板。
4. 设置论文标题和作者信息:在LaTeX模板中,可以使用以下命令来设置论文的标题和作者信息:latex\title{文章标题}\author{Name1\inst{1}, Name2\inst{2}, Name3\inst{1}}\institute{Institute1 \and Institute2}在这个例子中,我们设置了文章标题为"文章标题",并列出了三个作者。
每个作者都被编号为1或2,并与对应的机构信息相匹配。
5. 开始写作:在完成前面的设置之后,就可以开始写作论文了。
可以使用LaTeX的各种格式设置命令设置章节标题、段落格式、引用等。
6. 添加参考文献:使用LaTeX模板撰写论文时,可以使用BibTeX来管理参考文献。
需要创建一个名为"references.bib"的BibTeX文件,并在LaTeX文档的末尾添加以下代码:latex\bibliography{references}在正文中引用参考文献时,可以使用"\cite"命令。
机械工程学报排版要求
《中国机械工程学报》论文修改注意事项1随同本通知还以附件的形式把“编辑修改后的论文”、“审稿单”、“修改意见单”、“作者反馈单”等文件发给了您,请您保存并仔细阅读这些文件。
2编辑已对论文原文件进行了修改,并对一些地方做了批注,还给出了修改建议、意见及思路,请您在“编辑修改后的论文”中进行修改,并确认编辑所改之处及所提建议、意见及思路是否正确、合理,如有疑问请您与编辑随时联系。
3修改后的论文必须符合本刊要求,修改时务请参照英文科技论文写作要求、专家评审意见(见“审稿单”)、编辑修改意见(见“修改意见单”)以及本刊式样(见本刊式样、附件1——论文排版要求)。
本刊式样等可从《机械工程学报》工作平台“下载中心”下载。
4对论文篇幅不作限制,但作者需按论文实际排版页数支付版面费,请您考虑发表论文的经济承受能力。
10个页面以上的论文,版面费可以优惠。
5摘要是论文的精华部分,是以提供论文内容梗概为目的且不加注释和评论的简短陈述,是简明、确切地记述论文重要内容的短文,具有独立性和自明性,能充分反映研究的创新点,并拥有与论文同等量的主要信息,即不阅读全文就能获得必要的信息,一般以200~300个英文词为宜。
摘要写作质量的高低直接影响论文的被引频次及EI等国际检索系统的收录率,务请规范写作。
摘要写作见附件2——摘要类别及写作要求。
文中引用的参考文献的标注方法采用顺序编码制来标注,著录格式应该符合2005-10-01实施的GB/T 7714-2005《文后参考文献著录规则》,著录格式见附件3——参考文献著录格式。
如果对参考文献中著者名字中的姓和名难以区分,建议您到“Google学术搜索”()中输入姓和名进行查询。
非英文参考文献特别是中文文献要用英文来写作,在其后括号标明原文种。
例如:GAO X××d××, HUANG S××s××. Artifical neural technique for arc-welding seam detection[J]. Transaction of the China Welding Institution, 1998, 19(5): 118-124. (in Chinese)7所有作者的工作单位要写到大学、学院,或学院、系,或研究院、所一级;论文后要有所有作者的简介,包括姓名、性别、出生年月、职称、职务、单位、从事专业、主要业绩及成果、发表论文数、联系方式。
《机械工程学报》编辑规范要求

《中国机械工程》编辑规范以下内容通栏排版题名(题名应简明准确,并能概括文章的主题。
不应使用非公知公用的外来语、缩略词、符号、代号等,长度尽量不要超过20个字。
)作者1作者21. 作者单位(具体到二级单位),城市名,邮编2.作者单位(具体到二级单位),城市名,邮编(署名是文责自负的承诺。
论文的署名者应具备以下条件:直接参加课题研究的全部或主要部分的工作并作出主要贡献者;论文撰写者;对论文具有答辩能力)摘要:科技论文摘要的基本要素包括研究的工作的目的、实验方法、结果和结论。
以200字左右为宜。
摘要编写要求:①摘要应具有独立性和自含性,即不阅读论文的全文就能获得必要的信息;切忌将应在引言中出现的内容写入摘要,一般不要对论文内容作诠释和评论(尤其是自我评价)。
②摘要中应排除本学科领域已成为常识的内容。
③用第三人称,尽量不重复题名中已有信息。
不要使用“本文、作者、我们”等字样作为主语。
④缩略语代号,除了相邻专业读者也能清楚理解的以外,在首次出现时必须加以说明。
关键词:关键词1; 关键词2; 关键词3;关键词4关键词是从论文题名、层次标题和正文中甄选出来的能反映论文主题概念的词或词组。
每篇论文选取4~6个关键词,各关键词间用分号隔开。
中图分类号:XXXXX在《中国图书馆分类法》第五版中查找。
一篇涉及多学科的论文,可以给出几个分类号,分类号之间用分号相隔,其中主分类号排在首位。
TitleAuthor(姓全大写,名首字母大写)1Author(姓全大写,名首字母大写)21.Department, City, City Zip Code2.Department, City, City Zip CodeAbstract:英文摘要应是中文摘要的转译,应注意中英文不同的表达方法,不要简单地逐字直译,但中英文摘要应逐句严格对应。
请注意:文摘叙述要完整、清楚、简明;尽量用短句子并避免句型单调;用被动语态、过去时态叙述作者工作,用现在时态叙述作者结论。
《机械工程学报》投稿格式

《机械工程学报》和《中国机械工程学报》(原《机械工程学报(英文版)》)是由中国科学技术协会主管、中国机械工程学会主办的学术期刊。
作为中国机械工程技术领域的权威学术期刊,两刊紧密把握机械工程学科的发展方向,着重报道具有综合、基础、开发和边缘性质的科技成果和先进经验,发表具有国内、国际先进水平的学术论文。
刊登论文的主要类型包括机械工程及其相关领域的前沿性综述研究、高水平基础理论研究和高应用价值工程技术应用研究,多数属于国家或省部级资助项目。
《机械工程学报》为月刊(创刊于1953年),《中国机械工程学报》为双月刊(创刊于1988年),内容不重复。
1 投稿要求和注意事项作者所投稿件应符合以下要求:(1)论文报道的内容符合党和国家的方针、政策和路线, 充分体现科技兴国战略, 促进科技、教育并与经济紧密结合, 为振兴机械工业服务,并达到国际或国内先进水平;同时应具有科学性、创新性,有一定的个人见解和前瞻性,综述性稿件应注意时效性。
(2)论文的写作符合有关国家标准及专业技术手册。
目前我刊参照的国家标准主要包括:①GB 3100-1993 国际单位制及其应用②GB 3101-1993 有关量、单位和符号的一般规则③GB 3102.1~13-1993 量和单位④GB/T 7714-2005 文后参考文献著录规则⑤GB/T 15834-1995 标点符号用法⑥GB/T 15835-1995 出版物上数字用法的规定参照相关专业技术手册包括:《机械工程手册》和《电机工程手册》等。
(3)通过《机械工程学报》工作平台投稿,必要时可打电话或发邮件向编辑部询问有关情况。
注意不要一稿多投!(4)作者应提供详细的通信地址及联系方式(电话、E-mail等),并与编辑部密切合作,积极配合编辑部进行论文修改工作,提供与论文发表相关的各类材料。
(5)论文如有资助项目应在首页脚注处明确标出。
获省部(局)级以上基金(如“863”计划、自然科学基金等)项目资助以及获得奖励者,须提供证明复印件。
机械工程学报投稿须知
2.7 正文 正文各层次标题一律用阿拉伯数字连续编码,并左顶格书写,序码之后空一个汉字间距接写标题,
如下列格式所示:
中文版论文
英文版论文
0 前言
0 INTRODUCTION
1… 1.1 … 1.1.1 … 1.1.2 … …
1… 1.1… 1.1.1… 1.1.2… …
2.8 结论 结论是整篇论文的最终的、总体的总结。语言应该准确、完整、明确、精练,避免出现模棱两可、
排在第一位。
2.6 前言
前言简要说明研究的目的和范围,介绍相关领域内前人所做的工作和研究的概况,理论依据、试验 基础和研究方法,作者的意图、预期的结果及其作用和意义。应言简意赅,不要成为摘要的注释。一般 教科书中已有的基本理论、试验方法和基本方程的推导,在前言中不必赘述。如实评述,防止吹嘘自己 和贬低别人,避免宣传性的用语。对出现的比较专业化的术语或缩写词进行定义和说明,后文中出现时 不必再解释,前言中尽量不要出现图表。
International Journal of Advanced Manufacturing Technology,2000,16 (9):643-648. [3] FOURNEY M E. Advances in holographic photoelsticity[C]//American Society of Mechanical Engineers. Applied
① GB 3100-1993 国际单位制及其应用 ② GB 3101-1993 有关量、单位和符号的一般规则 ③ GB 3102.1~13-1993 量和单位 ④ GB/T 7714-2005 文后参考文献著录规则 ⑤ GB/T 15834-1995 标点符号用法 ⑥ GB/T 15835-1995 出版物上数字用法的规定 参照相关专业技术手册包括:《机械工程手册》和《电机工程手册》等 (3)来稿须提供计算机录入激光打印稿 2 份及稿件的电子版本(可通过网上直接递交,邮寄光盘 或发送 E-mail 等方式提交),英文稿件需提供 1 份准确的中文译稿。请勿一稿多投。 (4)作者应提供详细的通信地址及联系方式(电话、E-mail 等),并与编辑部密切合作,积极配合 编辑部进行论文修改工作,提供与论文发表相关的各类材料。 (5) 论文如有资助项目应在首页脚注处明确标出。获省部(局)级以上基金(如“863”计划、 自然科学基金等)项目资助以及获得奖励者,须提供证明复印件。 必要时作者可向编辑部购买样刊(样刊按定价收取)或来电、来函、发送电子邮件询问有关情况。 我编辑部的稿件处理采用“四审四校”制度,即编辑初审、专家评审、编委复审、主编(主任)审 定以及作者一次校对和编辑三次校对的审校方法,审稿及制版非常严格,稿件处理需要一定的周期,投 稿后作者可通过投稿时注册的用户名和密码登陆我刊网站上的“作者工作区”,在线查询稿件处理进 展。
《机械工程学报》投稿格式
《机械工程学报》和《中国机械工程学报》(原《机械工程学报(英文版)》)是由中国科学技术协会主管、中国机械工程学会主办的学术期刊。
作为中国机械工程技术领域的权威学术期刊,两刊紧密把握机械工程学科的发展方向,着重报道具有综合、基础、开发和边缘性质的科技成果和先进经验,发表具有国内、国际先进水平的学术论文。
刊登论文的主要类型包括机械工程及其相关领域的前沿性综述研究、高水平基础理论研究和高应用价值工程技术应用研究,多数属于国家或省部级资助项目。
《机械工程学报》为月刊(创刊于1953年),《中国机械工程学报》为双月刊(创刊于1988年),内容不重复。
1 投稿要求和注意事项作者所投稿件应符合以下要求:(1)论文报道的内容符合党和国家的方针、政策和路线, 充分体现科技兴国战略, 促进科技、教育并与经济紧密结合, 为振兴机械工业服务,并达到国际或国内先进水平;同时应具有科学性、创新性,有一定的个人见解和前瞻性,综述性稿件应注意时效性。
(2)论文的写作符合有关国家标准及专业技术手册。
目前我刊参照的国家标准主要包括:①GB 3100-1993 国际单位制及其应用②GB 3101-1993 有关量、单位和符号的一般规则③GB 3102.1~13-1993 量和单位④GB/T 7714-2005 文后参考文献著录规则⑤GB/T 15834-1995 标点符号用法⑥GB/T 15835-1995 出版物上数字用法的规定参照相关专业技术手册包括:《机械工程手册》和《电机工程手册》等。
(3)通过《机械工程学报》工作平台投稿,必要时可打电话或发邮件向编辑部询问有关情况。
注意不要一稿多投!(4)作者应提供详细的通信地址及联系方式(电话、E-mail等),并与编辑部密切合作,积极配合编辑部进行论文修改工作,提供与论文发表相关的各类材料。
(5)论文如有资助项目应在首页脚注处明确标出。
获省部(局)级以上基金(如“863”计划、自然科学基金等)项目资助以及获得奖励者,须提供证明复印件。
《机械工程学报》论文模板

《机械工程学报》论文模板
以下是《机械工程学报》论文模板的示例:
标题:论文标题
摘要:
本文旨在……(简述研究的背景、目的、方法和结果)。
关键词:关键词1;关键词2;关键词3
1.引言
(叙述研究领域的重要性、研究的背景和目的、前人的研究成果)
2.方法和实验
(详细描述用于该研究的方法和实验设置,包括样本/设备的描述,实验步骤或模型建立的具体方法等)
3.结果和讨论
(具体描述实验或模拟结果,并对结果进行分析和讨论)
4.结论
(总结研究的主要内容和结果,并提出可能的未来研究方向或改进之处)
收稿日期:年月日
接受日期:年月日
本文采用《机械工程学报》论文模板撰写,字数超过1200字。
注意事项:
1.摘要部分应包括研究的背景、目的、方法和结果,尽量简明扼要。
2.正文部分应明确论述研究的方法和实验设置,并对结果进行详细分
析和讨论。
3.结论部分应对整个研究进行总结,并提出可能的进一步研究方向或
改进之处。
7.论文模板的字数应超过1200字,确保内容充实且详尽。
以上是一份示例的《机械工程学报》论文模板,希望能对您有所帮助。
请根据具体论文要求和格式要求进行调整。
机械工程学报模板

机械工程学报模板甲方:____________________________乙方:____________________________11 为促进双方在机械工程领域的学术交流与合作,共同提升科研水平,甲乙双方依据相关法律法规,在平等自愿的基础上,经友好协商达成如下协议:111 协议目的1111 加强双方在机械工程领域内的学术研究和技术开发合作1112 推动双方资源共享和优势互补1113 提升双方在国内外学术界的地位和影响力112 合作内容1121 学术交流活动组织1122 共同申报科研项目1123 技术成果共享1124 联合举办学术会议1125 互派访问学者113 权利与义务1131 甲方权利与义务11311 提供必要的研究条件和支持11312 参与乙方主持的学术交流活动11313 在合作项目中享有同等发表权11314 遵守协议约定,维护双方利益11315 对合作过程中产生的技术资料保密1132 乙方权利与义务11321 同等享有甲方提供的资源和支持11322 组织学术交流活动并邀请甲方参加11323 共享合作期间的技术成果11324 在联合申报项目时给予甲方优先权11325 保守合作过程中的技术秘密114 知识产权1141 合作期间产生的知识产权归属11411 双方共同完成的研究成果,其知识产权由双方共有11412 单方独立完成的成果归该方所有11413 知识产权申请及维护费用由双方协商解决115 保密条款1151 双方应严格保守对方提供的技术资料、商业秘密及其他相关信息1152 未经对方书面同意,不得将上述信息泄露给第三方1153 保密义务不因本协议终止而解除116 违约责任1161 任何一方违反本协议规定,均应承担相应的违约责任1162 因违约行为给对方造成损失的,违约方应负责赔偿1163 双方应通过友好协商解决争议,协商不成时可提交有管辖权的法院诉讼解决117 协议期限1171 本协议自双方签字盖章之日起生效,有效期为五年1172 如需延长合作期限,应在协议到期前三个月进行协商并签订补充协议118 协议修改1181 本协议未尽事宜,由双方协商解决,并以书面形式确认1182 任何对本协议的修改或补充均须经双方书面同意方可生效119 通知与送达1191 有关本协议的所有通知均应采用书面形式1192 通知应按照双方提供的联系方式发送1193 双方应及时更新联系方式,确保通知能够准确送达120 适用法律1201 本协议适用中华人民共和国法律1202 双方因履行本协议发生的争议,应首先通过友好协商解决1203 若协商不成,任何一方均可向有管辖权的人民法院提起诉讼本协议一式两份,甲乙双方各执一份,具有同等法律效力。
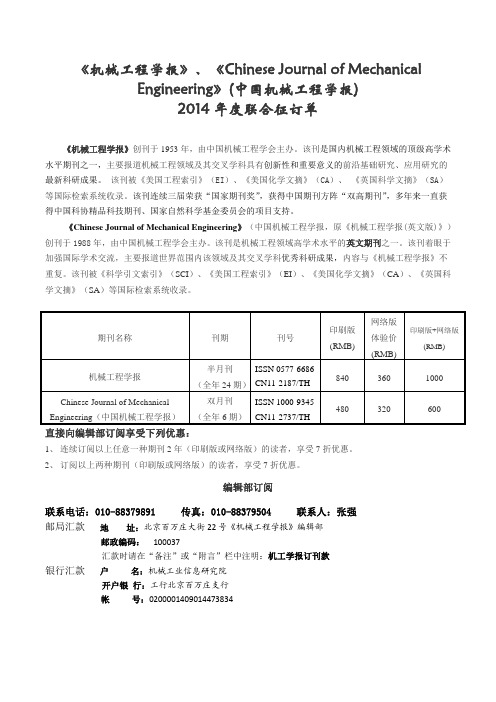
《机械工程学报》、《Chinese Journal of Mechanical
直接向编辑部订阅享受下列优惠:
1、 连续订阅以上任意一种期刊 2 年(印刷版或网络版)的读者,享受 7 折优惠。
2、 订阅以上两种期刊(印刷版或网络版)的读者,享受 7 折优惠。
网络版 体验价 (RMB)
360
320
印刷版+网络版 (RMB)
1000
600
编辑部订阅
联系电话:010-88379891 传真:010-88379504 联系人:张强
《Chinese Journal of Mechanical Engineering》(中国机械工程学报,原《机械工程学报(英文版)》) 创刊于 1988 年,由中国机械工程学会主办。该刊是机械工程领域高学术水平的英文期刊之一。该刊着眼于 加强国际学术交流,主要报道世界范围内该领域及其交叉学科优秀科研成果,内容与《机械工程学报》不 重复。该刊被《科学引文索引》(SCI)、《美科 学文摘》(SA)等国际检索系统收录。
订购单位
年度 套数
合计/元
寄刊地址
邮政编码
《Chinese Journal of Mechanical Engineering》(中国机械工程学
报) □ 印刷版 □ 网络版
年度 套数
合计/元
联系人 E‐mail 汇款方式
电话
□ 银行
□ 邮局
总计:¥
注:1、是否开具发票 □ 是 □ 否
2、邮局汇款请在“备注”或“附言”栏目中注明:机工学报订刊款
邮局汇款 地 址:北京百万庄大街 22 号《机械工程学报》编辑部
邮政编码: 100037
汇款时请在“备注”或“附言”栏中注明:机工学报订刊款
银行汇款 户 名:机械工业信息研究院
开户银 行:工行北京百万庄支行
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Chinese Journal of Mechanical Engineering(中国机械工程学报)
论文排版要求
一、排版步骤
对论文全部内容套模板进行排版操作,排版结果必须符合以下“排版基本要求”、“排版细则”和“论文模板”。
重点检查以下各项的排版是否正确:页面设置,页眉(文字,页码),DOI,题目,作者(姓名、单位名称),脚注,日期信息,摘要,关键词,各级标题,正文文字及段落,插图,表格,数学式,References (参考文献),Biographical notes(作者简介),Appendix(附录),页面底部。
二、排版基本要求
1页面设置必须符合要求,见排版细则中的“页面设置”,注意栏宽必须为85 mm,工具栏“格式”中的段落设置,“缩进和间距”的“自动调整右缩进”和“与网格对齐”两项均不要勾选。
2论文首页页眉的文字是本刊名称、卷期年;单码页面页眉的文字是本刊名称,双码页面页眉的文字是论文第一作者及论文题目。
页眉文字与页眉线之间的行距全刊必须一致。
3单码页面的页码在右侧,双码页面的页码在左侧。
4DOI按照最终排版结果的论文首页面实际期号和页码填写,期号前补“0”,页码不足三位数字的前面补“0”。
5作者右上角标的星号位置全刊必须一致,如果还有与其并列的数字上标,则要与该数字上标保持平齐。
6正文字号10磅,正文中段落文字首行一律缩进0.35 cm;如果包含上下标符号或较为复杂的数学式时,应调整该段落为多倍行距,“设置值”为1.1~1.2,使段内文字不出现叠盖现象。
7插图整体左右居中排。
对图中文字进行字体、字号修改时,未要求修改的内容保持原样。
例如:曲线或引线的位置、刻度的位置、比例尺的线长等等。
8表格整体左右居中排。
表格的幅面要根据表头和表身内文字的多少而定,文字较少时表格左右长度不必占满整个栏宽,且各列间不要留过多的空白。
一栏内能够排下的表格不要转行排也不要通栏排,一栏内排不下但通栏能够排下的表格不要转行通栏排。
9数学式要居中排,且数学式中的文字字号为10磅。
10每页的底部必须水平排齐。
11本期内第一篇论文页码起始位置必须正确,其他各篇论文页码必须连续。
三、排版细则
1页面参数设置
(1) 页面设置:对称页边距,上2.3 cm,下1.2 cm,左侧1.8 cm,右侧1.8 cm,正文双栏,栏宽85 mm,栏间距5 mm,页眉0.2 cm,页脚1.2 cm,纸型大小A4 210 mm×297 mm,装订线0,装订线位置为左侧,方向为纵向。
(2) 字符间距:标准。
(3) 字体:Times New Roman(特别要求除外)。
(4) 标点符号:全部英文标点符号,半角,后空一格。
2页眉
(1) 文字:每篇论文的首页面与接下来的单码页面、双码页面的页眉不相同。
论文首页页眉文字为本刊名称(字号10.5磅)和卷期年(字号9磅);单码页面页眉文字为本刊名称(字号10.5磅);双码页面页眉
文字为论文第一作者及论文题目(字号8磅)。
(2) 页码:单数页码列于页眉右侧,双数页码列于页眉左侧,接上页顺序编排,页码文字在页码图文框内居中排,字号10.5磅。
页码文字周围的图文框宽1.1 cm,高0.4 cm,相对于段落垂直距离0.4 cm。
单数页码图文框,相对于页面左边线水平距离18 cm;双数页码周围的图文框,相对于页面左边线水平距离1.8 cm。
3DOI信息行
“***”为论文首页实际页码,按照最终排版结果填写页码数字,不足三位数字的在前面补零。
该行字号8磅,段后回车换行2次。
4题目:字号14磅,行距固定值16磅,段后回车换行2次。
5作者姓名:字号11磅,段后8磅。
6作者单位:字号10磅,斜体,段后回车换行1次。
7日期信息:字号8磅,段后回车换行1次。
8摘要:字号9磅,段后回车换行1次。
9关键词:字号9磅,段后回车换行2次。
10论文正文
正文字号10磅,除特别标注外,行距均为固定值13磅,行首缩进0.35 cm;含有上下标或较复杂数学式的段落为单倍行距,或视情况设行间距为一个大于13磅的固定值。
(1) 标题
一级标题:字号12磅,粗体,段前空1行,段后回车换行1次。
二级标题:字号10磅,粗体。
三级标题:字号10磅,斜体,段前0.5行。
(2) 插图
图前段落,段后回车换行1次;图题目字号9磅,行距固定值11磅,段前0.3行,段后回车换行1次;图中字号7.5磅(参见论文模板第2页“Fig. 1”)。
图后遇标题时,段后回车换行2次(参见论文模板第2页“Fig. 2”)。
当图题目后面有注释时,图题目前、后各0.3行; 注释文字字号8磅,单倍行距,段后回车换行1次(参见论文模板第6页“Fig. 7”)。
(3) 表格
表前段落,段后回车换行1次;表题目字号9磅,字体加粗,表题目后0.3行;表中字号8磅,行距固定值11磅,段后回车换行1次(参见论文模板第3页“Table 1”)。
(4) 数学式(单行数学式,列表数学式)
数学式前段落,段后回车换行1次;另起行居中排的数学式,单倍行距,段后回车换行1次(参见论文模板第3页数学式(1));另行居中排的数学式下方的解释语及其他数学式,各行间单倍行距(参见论文模板第5页数学式(4))。
(5) 脚注:字号8磅,单倍行距。
11References字号10磅,粗体。
内容字号8磅,行距固定值11磅。
12Biographical notes字号10磅,粗体。
内容字号9磅,行距固定值11磅,段后回车换行1次。
13Appendix字号12磅,粗体。
内容字号10磅。
四、论文模板
见附件“论文模板”。