空三SOP
SOP文件目录
一、人事工作程序SOPCR01-1 新聘用人员培训的标准操作规程SOPCR02-1 员工培训的标准操作规程SOPCR03-1 特殊工种培训的标准操作规程SOPCR04-1 进入洁净区人员培训的标准操作规程SOPCR05-1 《上岗操作证》发放的标准操作规程SOPCR06-1 各种经济类合同审核、签订的标准操作规程二、岗位职责SOPGW01-1 总经理岗位职责SOPGW02-1 副总经理的岗位职责SOPGW03-1 质量管理部部长的岗位职责SOPGW04-1 市场营销部部长的岗位职责SOPGW05-1 财务人事部部长的岗位职责SOPGW06-1 生产部部长的岗位职责SOPGW07-1 公共关系部部长的岗位职责SOPGW08-1 质量保证经理的岗位职责SOPGW09-1 质量检验经理的岗位职责SOPGW10-1 理化检验员的岗位职责SOPGW11-1 生物检测的岗位职责SOPGW12-1 专职质监员的岗位职责SOPGW13-1 物料经理的岗位职责SOPGW14-1 生产调度员的岗位职责SOPGW15-1 公关部文秘员的岗位职责SOPGW16-1 财务部主办会计的岗位职责SOPGW17-1 财务部出纳会计的岗位职责SOPGW18-1 留样观察员的岗位职责SOPGW19-1 设备责任人的岗位职责SOPGW20-1 仓库保管员的岗位职责SOPGW21-1 公司保安人员的岗位职责SOPGW22-1 市场营销部业务员的岗位职责SOPGW23-1 公司清洁工的岗位职责SOPGW24-1 车间主任的岗位职责SOPGW25-1 理瓶岗位的职责SOPGW26-1 精洗瓶岗位的职责SOPGW27-1 器具清洗岗位的职责SOPGW28-1 干热灭菌岗位的职责SOPGW29-1 配制岗位的职责SOPGW30-1 铝盖洗涤岗位的职责SOPGW31-1 精制岗位的职责SOPGW32-1 分装岗位的职责SOPGW33-1 冻干岗位的职责SOPGW34-1 轧盖岗位的职责SOPGW35-1 洁净服洗涤、消毒岗位的职责SOPGW36-1 贴签岗位的职责SOPGW37-1 包装岗位的职责SOPGW38-1 中央空调岗位的职责SOPGW39-1 纯化水生产岗位的职责SOPGW40-1 注射用水生产岗位的职责SOPGW41-1 维修电工的岗位职责SOPGW42-1 生产部机修工的岗位职责SOPGW43-1 车间质监员的岗位职责SOPGW44-1 仓库质监员的岗位职责SOPGW45-1 质量检验质监员的岗位职责SOPGW46-1 设备管理质监员的岗位职责SOPGW47-1 市场营销质监员的岗位职责SOPGW48-1 用户投诉处理的岗位职责SOPGW49-1 设备经理的岗位职责三、设备操作程序SOPSB01-1 新采购设备开箱验收的标准操作程序SOPSB02-1 安装、调试、验收设备的标准操作规程SOPSB03-1 设备档案建立、管理的标准操作程序SOPSB04-1 设备计划检修的标准操作程序SOPSB05-1 设备大、中、小修理的标准操作规程SOPSB06-1 使用、管理计量器具的标准操作规程SOPSB07-1 仪器、仪表校验的标准操作规程SOPSB08-1 测量仪器及装置管制的标准操作规程SOPSB09-1 使用、管理压力容器的标准操作规程SOPSB10-1 意外停电、停水应急处理的标准操作规程SOPSB11-1 送配电的标准操作规程SOPSB12-1 电器维修的标准操作规程SOPSB13-1 小型计算机的标准操作规程SOPSB14-1 H100Ⅱ中央空调器的标准操作规程SOPSB15-1 CS-02纯水机的标准操作规程SOPSB16-1 LDS100/4B多效蒸馏水机的标准操作规程SOPSB17-1 XPJ-2洗瓶机的标准操作规程SOPSB18-1 DW400/50L电热压力灭菌器的标准操作规程SOPSB19-1 DMH系列双门远红外灭菌柜的标准操作规程SOPSB20-1 PELLICON超滤器的标准操作规程SOPSB21-1 桶式过滤器的标准操作规程SOPSB22-1 液体分装机(含半加塞)的标准操作规程SOPSB23-1 ULTRA冻干机的标准操作规程SOPSB24-1 KFR-51LW/D柜式空调器的标准操作规程SOPSB25-1 轧盖机的标准操作规程SOPSB26-1SOPSB27-1 YP3000电子天平的标准操作规程SOPSB28-1 HH3/4电热恒温水浴锅的标准操作规程SOPSB29-1 配液罐使用的标准操作规程SOPSB30-1 PHS-3C型精密PH计的标准操作规程SOPSB31-1 数字电导率仪的标准操作规程SOPSB32-1 101-300电热干燥箱的标准操作规程SOPSB33-1 DRP-9052生化培养箱的标准操作规程SOPSB34-1 热球式风速仪的标准操作规程SOPSB35-1 显微镜使用的标准规程SOPSB36-1 冰箱使用、养护的标准操作规程SOPSB37-1 SXG-4型旋光仪的标准操作规程SOPSB38-1 SX-2箱式电阻炉的标准操作规程SOPSB39-1 YB-2澄明度检测仪的标准操作规程SOPSB40-1 通风橱应用、养护的标准操作规程SOPSB41-1 激光粒子计数器的标准操作规程SOPSB42-1 KF-412水分测定仪的标准操作规程SOPSB43-1 超净工作台的标准操作规程SOPSB44-1 货运升降机的标准操作规程SOPSB45-1 压力蒸汽灭菌器的标准操作规程SOPSB46-1 DRY-100热色带打码机的标准操作规程SOPSB47-1 AE100分析天平的标准操作规程SOPSB48-1 高效液相色谱仪的标准操作规程SOPSB49-1 YXQ.SG41_280A型电热压力灭菌器的标准操作规程SOPSB50-1 紫外可见分光光度计光谱扫描使用的标准操作规程SOPSB51-1 霉菌培养箱的标准操作规程SOPSB52-1 HH.B11.360型电热培养箱的标准操作规程SOPSB53-1 DL-101-JB2自动贴标机的标准操作规程四、物料工作程序SOPWL01-1 物料采购的标准操作规程SOPWL02-1 物料验收、入库的标准操作规程SOPWL03-1 物料贮存的标准操作规程SOPWL04-1 物料发放、领用的标准操作规程SOPWL05-1 原辅料称量、发放的标准操作规程SOPWL06-1 原辅材料复验的标准操作规程SOPWL07-1 原辅材料退库的标准操作规程SOPWL08-1 药品外包装、标签等设计、审核的标准操作规程SOPWL09-1 包装材料验收、贮存的标准操作规程SOPWL10-1 外包装材料发放和领用的标准操作规程SOPWL11-1 包装材料退库的标准操作规程SOPWL12-1 不合格品处理的标准操作规程SOPWL13-1 危险品采购、运输、入库的标准操作规程SOPWL14-1 成品入库的标准操作规程SOPWL15-1 成品发货的标准操作规程SOPWL16-2 产品零头处理的标准操作规程SOPWL17-1 退货产品处理的标准操作规程SOPWL18-1 原辅料分小包装的标准操作规程五、卫生工作程序SOPWS01-1 厂区环境卫生清理的标准操作规程SOPWS02-1 环境质量监控的标准操作规程SOPWS03-1 生产区域卫生监控的标准操作规程SOPWS04-1 人员进入生产区的标准操作规程SOPWS05-2 工艺卫生检查评价的标准操作规程SOPWS06-1 消毒剂配制的标准操作规程SOPWS07-1 人员经净化进入洁净区的标准操作规程SOPWS08-1 生产操作人员卫生管制的标准操作规程SOPWS09-1 洁净室清场验收的标准操作规程SOPWS10-1 器具、物料进入洁净室的标准操作规程SOPWS11-1 废弃物处理的标准操作规程SOPWS12-1 初、中效空气过滤器管制的标准操作规程SOPWS13-1 高效空气过滤器检测的标准操作规程SOPWS14-1 高效空气过滤器使用、更换的标准操作规程SOPWS15-1 参观用工作服、鞋套、帽子管制的标准操作规程SOPWS16-1 昆虫、其它动物防范的标准操作规程SOPWS17-1 人员进入生物检定室的标准操作规程SOPWS18-1 控制区清场验收的标准操作规程SOPWS19-1 吸尘器的标准操作规程六、清洁程序SOPQJ01-2 洁净厂房清洁消毒的标准操作规程SOPQJ02-1 控制区清洁的标准操作规程SOPQJ03-1 洁净区清场的标准操作规程SOPQJ04-1 控制区清场的标准操作规程SOPQJ05-1 制水室清洁的标准操作规程SOPQJ06-1 仓库清洁的标准操作规程SOPQJ07-1 纯化水贮罐管道清洗、钝化和消毒的标准操作规程SOPQJ08-1 注射用水贮罐、管道钝化、清洁、消毒的标准操作规程SOPQJ09-1 洁净区器具清洗、消毒的标准操作规程SOPQJ10-1 洁净区洁具清洗、消毒的标准操作规程SOPQJ11-2 洁净服清洗、整理、消毒的标准操作规程SOPQJ12-1 回风窗清洁、消毒的标准操作规程SOPQJ13-1 传递窗使用、清洁的标准操作规程SOPQJ14-1 配液罐清洗、消毒的标准操作规程SOPQJ15-1 XPJ-2洗瓶机清洁的标准操作规程SOPQJ16-1 电热压力灭菌器清洁的标准操作规程SOPQJ17-1 DMH系列远红外灭菌柜清洁的标准操作规程SOPQJ18-1 分装机清洁标准操作规程SOPQJ19-1 ULTRA冻干机清洁的标准操作规程SOPQJ20-1 轧盖机清洁的标准操作规程SOPQJ21-1 小型膜式空气压缩机清洁的标准操作规程SOPQJ22-1 净化工作台清洁的标准操作规程SOPQJ23-1 桶式过滤器清洁的标准操作规程SOPQJ24-1 CS-02纯水机清洁的标准操作规程SOPQJ25-1 LDS100/4B多效蒸馏水机清洁的标准操作规程SOPQJ26-1 H100Ⅱ中央空气调节器清洁的标准操作规程SOPQJ27-1 包装车间清场的标准操作规程SOPQJ28-1 控制区工作服清洗的标准操作规程SOPQJ29-1 控制区洁具清洁的标准操作规程SOPQJ30-1 废物贮器清洗、消毒的标准操作规程SOPQJ31-1 洁净区地漏清洁的标准操作规程SOPQJ32-1 生产区水池清洁的标准操作规程SOPQJ33-1 烘手机清洁的标准操作规程SOPQJ34-1 灭蚊灯维护、清洁的标准操作规程SOPQJ35-1 紫外灯使用、养护的标准操作规程SOPQJ36-1 更衣室衣柜清洁的标准操作规程SOPQJ37-1 空气过滤器清洁、消毒的标准操作规程七、生产工艺规程SOPGY01-4 注射用硫酸奈替米星的生产工艺规程SOPGY02-2 注射用盐酸川芎嗪的生产工艺规程八、生产部工作程序SOPSC01-1 各类档案借阅、归档的标准操作规程SOPSC02-1 新产品投产管制的标准操作规程SOPSC03-1 生产计划及指令编制、下发、执行的标准操作规程SOPSC04-1 工艺规程变更管制的标准操作规程SOPSC05-1 操作规程变更管制的标准操作规程SOPSC06-1 安全生产检查的标准操作规程SOPSC07-1 《批生产记录》审核、归档的标准操作规程SOPSC08-1 差错的纠正和预防的标准操作规程SOPSC09-1 偏差处理的标准操作规程SOPSC10-1 员工交接班的标准操作规程SOPSC11-1 状态标志安置、更换的标准操作规程SOPSC12-1 接待来宾进生产区的标准操作规程九、针剂车间操作程序SOPZJ01-1 纯化水制备的标准操作规程SOPZJ02-1 注射用水制备的标准操作规程SOPZJ03-1 工艺用水制备岗位自检的标准操作规程SOPZJ04-1 洁净空气供应的标准操作规程SOPZJ05-1 理瓶岗位的标准操作规程SOPZJ06-2 管制瓶清洗、灭菌的标准操作规程SOPZJ07-1 胶塞清洗、灭菌的标准操作规程SOPZJ08-1 铝盖洗涤的标准操作规程SOPZJ09-1 物品消毒岗位的标准操作规程SOPZJ10-1 称量岗位的标准操作规程SOPZJ11-1 奈可星配液的标准操作规程SOPZJ12-1 精制岗位的标准操作规程SOPZJ13-1 分装岗位的标准操作规程SOPZJ14-1 药液冻干的标准操作规程SOPZJ15-1 轧盖岗位的标准操作规程SOPZJ16-1 半成品进、出中转库的标准操作规程SOPZJ17-1 磷酸二氢钠溶液配制的标准操作规程SOPZJ18-1 可杰星配液的标准操作规程SOPZJ19-1 玻瓶、胶塞清洁度检查的标准操作规程SOPZJ20-1 粉针剂半成品目检的标准操作规程十、包装车间操作程序SOPBZ01-1 贴签岗位的标准操作规程SOPBZ02-1 针剂包装的标准操作规程SOPBZ03-2 成品零头合箱的标准操作规程十一、验证工作程序SOPYZ01-2 实施GMP验证的标准操作规程SOPYZ02-1 验证方案编制的标准操作规程SOPYZ03-1 验证报告评价、审批的标准操作规程SOPYZ04-1 硫酸奈替米星生产用厂房验证方案SOPYZ05-1 工艺用水系统的验证方案SOPYZ06-1 无菌衣灭菌效果的验证方案SOPYZ07-1 消毒剂消毒效果的验证方案SOPYZ08-1 设备清洗的验证方案SOPYZ09-2 洗瓶机的验证方案SOPYZ10-2 对开门远红外灭菌柜的验证方案SOPYZ11-1 过滤除菌系统的验证方案SOPYZ12-2 超滤去热原系统的验证方案SOPYZ13-1 灌装、盖塞联动机(含半加塞)验证方案SOPYZ14-3 冻干机的验证方案SOPYZ15-1 丁基胶塞免洗效果验证SOPYZ16-1 冻干注射用硫酸奈替米星工艺验证方案SOPYZ17-1 电热压力灭菌器的验证方案SOPYZ18-1 注射用盐酸川芎嗪的工艺验证方案SOPYZ19-1 培养基模拟分装验证方案SOPYZ20-1 纯化水系统的验证方案SOPYZ21-1 注射用水系统的验证方案SOPYZ22-1 超滤机清洗效果验证方案SOPYZ23-1 冻干机清洗效果验证方案SOPYZ24-1 单门远红外烘箱验证方案十二、质量标准SOPZB01-1 检验报告书的编号原则SOPZB02-3 生产批号的编号原则SOPZB03-1 设备的编号原则(含仪器)SOPZB04-1 计量器具的编号原则SOPZB05-4 物料进厂的分类编号原则SOPZB06-1 洁净室的编号原则SOPZB07-1 高效过滤器的编号原则SOPZB08-1 注射用水的质量标准SOPZB09-1 纯化水的质量标准SOPZB10-2 粉针剂的包装标准SOPZB11-2 管制抗生素瓶的质量标准SOPZB12-2 13G101型丁基橡胶塞的质量标准SOPZB13-1 铝塑盖的质量标准SOPZB14-1 奈可星标签的质量标准SOPZB15-1 奈可星包装纸盒的质量标准SOPZB16-1 奈可星说明书的质量标准SOPZB17-2 粉针剂包装纸箱的质量标准SOPZB18-2 封口签的质量标准SOPZB19-1 硫酸奈替米星的质量标准SOPZB20-3 注射用硫酸奈替米星的质量标准SOPZB21-1 甘露醇的质量标准SOPZB22-2 盐酸川芎嗪的质量标准SOPZB23-2 注射用盐酸川芎嗪的质量标准SOPZB24-1 可杰星使用说明书的质量标准SOPZB25-1 可杰星标签的质量标准SOPZB26-1 可杰星包装纸盒的质量标准SOPZB27-1 塑料衬垫(吸塑)的质量标准SOPZB28-1 注射用硫酸奈替米星中间产品质量标准SOPZB29-1 注射用盐酸川芎嗪中间产品质量标准SOPZB30-1 厂房洁净度的质量标准SOPZB31-1 磷酸二氢钠的质量标准十三、质量管理程序SOPZG01-2 技术文件起草、审查、生效、废除的标准操作规程SOPZG02-1 进行GMP自检的标准操作规程SOPZG03-1 注射剂生产质量监控的标准操作规程SOPZG04-1 质量标准变更管制的标准操作规程SOPZG05-1 质量事故的标准调查、处理程序SOPZG06-1 用户访问及来函、来访接待的标准操作规程SOPZG07-2 药品不良反应监控、报告的标准操作规程SOPZG08-1 实验操作数据记录管制的标准操作规程SOPZG09-2 物料供应商质量审计的标准操作规程SOPZG10-1 有洁净度要求的物料取样的标准操作规程SOPZG11-1 一般物料取样的标准操作规程SOPZG12-1 洁净区操作人员染菌数监测规程SOPZG13-1 留样观察的标准操作规程SOPZG14-1 洁净厂房环境监测规程SOPZG15-1 菌种复苏、传代及保存的标准操作规程SOPZG16-1 培养基配制、灭菌的标准操作规程SOPZG17-1 容量器具校正的标准操作规程SOPZG18-1 天平、台称校正的标准操作规程SOPZG19-1 沉降菌监测的标准操作规程SOPZG20-1 HA VC系统风速检查的标准操作规程SOPZG21-1SOPZG22-1 产品生产、检验、放行的管理规程SOPZG23-1 工艺用水检验取样的标准操作规程SOPZG24-1 取样证、合格证、不合格证发放规程SOPZG25-1 工艺用水监控的管理规程SOPZG26-1 检验结果复核标准操作规程SOPZG27-1 检验结果偏差处理的标准操作规程SOPZG28-1 物料贮存、发放的监控规程SOPZG29-1 成品贮存、发放监控规程SOPZG30-1 各类质量投诉处理的标准操作规程SOPZG31-1 生物检定室清洁规程SOPZG32-1 生物检定洁净服清洗、消毒的标准操作规程十四、质量检验程序SOPZL01-1 原料、成品和中间产品检验的标准操作规程SOPZL02-1 滴定液配制、标化操作的标准操作规程SOPZL03-1 纯化水检验的标准操作规程SOPZL04-1 注射用水检验的标准操作规程SOPZL05-1 硫酸奈替米星检验的标准操作规程SOPZL06-3 注射用硫酸奈替米星检验的标准操作规程SOPZL07-1 玻璃器具洗涤及干燥的标准操作规程SOPZL08-1 氯化物检查的标准操作规程SOPZL09-1 重金属检查的标准操作规程SOPZL10-1 硫酸盐检查的标准操作规程SOPZL11-1 旋光度测定的标准操作规程SOPZL12-1 氨盐检查的标准操作规程SOPZL13-1 熔点测定的标准操作规程SOPZL14-1 水分测定的标准操作规程SOPZL15-1 溶液澄清度与颜色检查的标准操作规程SOPZL16-1 微生物限度检查的标准操作规程SOPZL17-1 细菌内毒素检查的标准操作规程SOPZL18-1 异常毒性检查的标准操作规程SOPZL19-1 注射剂无菌检查的标准操作规程SOPZL20-1 无菌检查的标准操作规程SOPZL21-1 降压物质检查的标准操作规程SOPZL22-1 洁净室悬浮粒子数测定的标准操作规程SOPZL23-1 炽灼残渣检查的标准操作规程SOPZL24-1 粉针剂装量差异检查的标准操作规程SOPZL25-1 注射用硫酸奈替米星有关物质检查的标准操作规程SOPZL26-1 注射用硫酸奈替米星鉴别的标准操作规程SOPZL27-1 硫酸奈替米星含量测定的标准操作规程SOPZL28-2 甘露醇检验的标准操作规程SOPZL29-2 粉针剂包装纸箱检验的标准操作规程SOPZL30-1 奈可星说明书检验的标准操作规程SOPZL31-2 粉针剂标签检验的标准操作规程SOPZL32-2 13G101型丁基橡胶塞检验的标准操作规程SOPZL33-2 管制抗生素瓶检验的标准操作规程SOPZL34-1 铝塑盖检验的标准操作规程SOPZL35-2 粉针剂包装纸盒检验的标准操作规程SOPZL36-1 氢氧化钠检验的标准操作规程SOPZL37-1 砷盐检查的标准操作规程SOPZL38-1 铁盐检查的标准操作规程SOPZL39-2 盐酸川芎嗪检验的标准操作规程SOPZL40-2 注射用盐酸川芎嗪检验的标准操作规程SOPZL41-1 高效液相色谱法测定的标准操作规程SOPZL42-1 干燥失重检查的标准操作规程SOPZL43-1 分光光度法测定的标准操作规程SOPZL44-2 封口签检验的标准操作规程SOPZL45-1 塑料衬垫(吸塑)检验的标准操作规程SOPZL46-1 PH值测定的标准操作规程SOPZL47-1 工艺用水检验用试剂配制的标准操作规程SOPZL48-1 粉针剂澄明度检查的标准操作规程SOPZL49-1 可杰星使用说明书检验的标准操作规程SOPZL50-1 磷酸二氢钠检验的标准操作规程十五、市场营销部工作程序SOPXS01-1 售出产品质量跟踪的标准操作规程SOPXS02-1 定期访问客户的标准操作规程SOPXS03-1 客户抱怨、投诉的标准处理规程SOPXS04-1 紧急情况产品收回的标准操作规程SOPXS05-1 成品退货交接的标准操作规程。
SOP是什么
SOP标准作业指导书的培训材料标准操作规程(SOP)基础知识标准操作规程(SOP)是各种标准化管理认证和产品认证的重要内容,各行业都有SOP的要求。
什么是SOP?简单的讲,SOP就是一套包罗万象的操作说明书大全。
一套好SOP是确保产品或服务质量的必要条件。
SOP不仅仅是一套技术性范本,它更重要的涵盖了管理思想、管理理念和管理手段。
由于在成熟的行业,都有明确的管理规范和认证体系,因此其SOP的标准化和成熟性都比较高,编写SOP也有依据难度较低。
由于目前还没有成熟的实验室管理和认证体系,因此,在检验工作中编写SOP会有些盲然。
首先,SOP具有行业特点,不同的行业都有不同的SOP。
就检验工作而言,仪器有仪器的SOP,试剂有试剂的SOP,各个项目有各自不同的SOP,别说是细菌、生化免疫这些学科不同的有不同的SOP,就是同一学科内不同项目也有不同的SOP。
所以检验SOP不是一个,而一套。
第二,SOP事无巨细,也就是说只要与项目有关,要详细全面,要包括所有的可能出现的细节。
以飞行员操作规程为例,第一条竞然是“坐下”,由此可以看出,SOP涵盖细节程度。
SOP 不是简单的操作说明,而应该是实用操作大全,应该成为工具书性质的东西。
一套理想的SOP 应该让一个不懂的学了后就能成为专家。
第三,SOP不是仅仅是详尽的操作说明,它是管理规范的一部分,也包涵着质量控制和管理理念,从中甚至可以看到人员配置等情况。
虽然不同的行业SOP的具体内容是不同的,但是其是有确实的逻辑联系,因此借鉴其他行业特别相近行业的SOP要求是很有价值的。
以药品生产SOP为例,其要求是GMP认证所要求的,根据GMP,其SOP的重点见附。
借鉴药品的SOP的重点,检验SOP应该包涵:1、操作程序:实验和仪器的操作程序、实验器械的取用和实验后的处理、实验台的清洗、实验物溢漏的处理等2、质量控制:实验和仪器的质量监控,如实验质控数量(高、中、低?),仪器的校正(人员、时间、方法等)、维护和保养、实验的原始记录等。
SOP格式规范 (1)
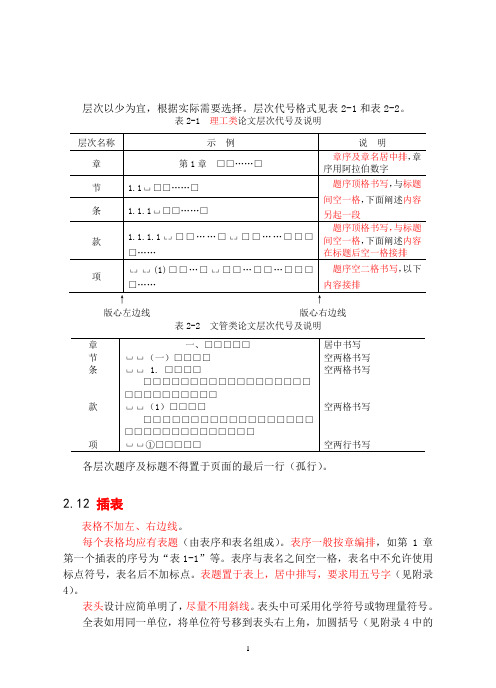
层次以少为宜,根据实际需要选择。
层次代号格式见表2-1和表2-2。
表2-1 理工类论文层次代号及说明版心左边线版心右边线表2-2 文管类论文层次代号及说明各层次题序及标题不得置于页面的最后一行(孤行)。
2.12 插表表格不加左、右边线。
每个表格均应有表题(由表序和表名组成)。
表序一般按章编排,如第1章第一个插表的序号为“表1-1”等。
表序与表名之间空一格,表名中不允许使用标点符号,表名后不加标点。
表题置于表上,居中排写,要求用五号字(见附录4)。
表头设计应简单明了,尽量不用斜线。
表头中可采用化学符号或物理量符号。
全表如用同一单位,将单位符号移到表头右上角,加圆括号(见附录4中的例2)。
表中数据应正确无误,书写清楚。
数字空缺的格内加“—”字线(占2个数字宽度)。
表内文字和数字上、下或左、右相同时,不允许用“″”、“同上”之类的写法,可采用通栏处理方式(见附录4中的例2)。
表内文字说明用五号字,起行空一格、转行顶格、不加标点。
文管类的插表在表下一般根据需要可增列补充材料、注解、附记、资料来源、某些指标的计算方法等。
2.13.2 图题及图中说明每个图均应有图题(由图号和图名组成)。
图号按章编排,如第1章第一图的图号为“图1-1”等。
图题置于图下。
有图注或其他说明时应置于图题之上。
图名在图号之后空一格排写。
引用图应说明出处,在图题右上角加引用文献编号。
图中若有分图时,分图号用a)、b)等置于分图之下。
图中各部分说明应采用中文(引用的外文图除外)或数字项号,各项文字说明置于图题之上(有分图题者,置于分图题之上)。
图题及图中说明均采用五号字。
2.13.3 插图编排插图与其图题为一个整体,不得拆开排写于两页。
插图应编排在正文提及之后,插图处的该页空白不够排写该图整体时,则可将其后文字部分提前排写,将图移到次页最前面。
3.1 字体论文正文所用字体要求为宋体。
3.2 字号第一层次(章)题序和标题用小二号黑体字。
第二层次(节)题序和标题用小三号黑体字。
空调机组岗位SOP

车间空调岗位SOP1.目的通过建立空调岗位SOP并严格执行,以达到操作的规范化、标准化,确保洁净区及无菌室的空气净化及消毒。
2.适用范围本规程适用于空调岗位各工序的操作控制。
3.职责3.1空调岗位操作人员负责本规程的实施。
3.2车间质检员及提炼工段长负责对本规程的实施情况进行监督检查。
4.操作程序4.1空调净化系统的操作4.1.1操作前的准备4.1.1.1检查冷却水管道、蒸汽管道、各阀门有无泄漏。
4.1.1.2检查各维修门,确保其关闭。
4.1.2开机运行4.1.2.1洁净区工作前30分钟开机,对洁净区进行空气净化。
4.1.2.2 接通电源,启动空调净化系统鼓风机及洁净区排风管道的排风引风机。
4.1.2.3机组运行30分钟后,操作人员调节各阀门,确保控制送风温度18℃~26℃、相对湿度45%~65%。
送风温湿度以洁净区走廊的温湿度为准。
4.1.2.4空调机组人员每2小时询问一次洁净区走廊的温湿度和有无异常情况,作好记录,同时记录初、中效前后的压差及洁净区内外压差,并根据洁净区内的温湿度(以洁净区走廊的温湿度为依据,结合干燥室和分离室内的温湿度)、洁净区内外压差及时调节空调机组:A.当走廊内温度低于18℃时,机组人员通过适当调节蒸汽的进汽阀门和排汽阀门,控制温度在规定范围内;B.当走廊温度高于26℃时,机组人员通过适当关闭进汽阀门和排汽阀门或打开表冷器的进水阀和排水阀,调节送风温度,控制走廊内的温度;由于干燥过程中室内温度偏高,所以尽可能将送风温度控制低一些,但不得低于18℃;C.根据本产品干燥工序的工艺特点,只要走廊内的湿度不低于45%,就不需进行加湿。
若需加湿,机组人员要适当打开加湿器的进汽阀门,蒸汽通过加湿器由疏水器排出其中水份,蒸汽从分离室四周通过,由针形调节阀孔进入干汽室汽化,干燥后由喷嘴喷出对空气加湿;D.若走廊内的湿度高于65%需进行除湿,机组人员要适当打开表冷器进水阀和排水阀,使空气中水份凝结排出,从而达到减湿的目的;由于分离室内的湿度偏高,所以尽可能将送风湿度控制低一些,但不得低于45%;E.洁净区与一般区的压差应>11P a,洁净走廊相对于缓冲间应呈正压(不低于1 Pa)。
臭氧发生器操作及维护保养SOP

臭氧发生器操作及维护保养S O PIMB standardization office【IMB 5AB- IMBK 08- IMB 2C】建立河北凯威制药有限责任公司康领分厂口服固体制剂车间臭氧发生器安全操作及维护保养的标准操作规程,促进安全生产的规范化、制度化。
适用范围Scope本文制定了河北凯威制药有限责任公司康领分厂口服固体制剂车间臭氧发生器的操作及维护保养规程。
本文件仅适用于江苏徐州九州龙JZCF-G-3-240g型水冷式臭氧发生器的安全操作及维护保养方法。
岗位职责动力主管负责设备的定期维护、保养和统一管理。
动力操作人员负责设备日常安全使用、清洁卫生和填写使用记录。
岗位要求动力操作人员要求熟悉设备的安全操作规程。
了解设备的基础结构、配套设施及工作原理,确保正确运行机组。
操作人员对机组负有看管和维护责任。
未经管理人员批准,不准他人乱动、无关人员操作设备。
设备启动后,操作人员不能擅自离开工作岗位。
多人操作同一台设备时,应严格履行交接班检查手续。
设备发生故障时,应立即停机,保护现场;及时通知动力主管,报告事故发生过程和情节,以查证原因,妥善处理。
缩写及定义Abbreviations&Definitions不适用N/A参考文件References《九洲龙文本新工艺240G》《新产品烤漆JZCF-100g说明书V111105操作面板》内容Contents工作原理九洲龙臭氧发生器利用介质阻挡放电产生的高速电子将氧分子离解为氧原子,氧原子迅速的与氧分子反应生成臭氧分子。
介质和放电间隙决定了臭氧产生的浓度,以及臭氧发生器产生的臭氧量。
采用微间隙放电结构,在低电压下即可产生非常强烈的介质阻挡放电,放电产生的大量高能电子在放电空间内引起一系列的化学反应,产生臭氧,从而保证了较高的臭氧出口浓度和臭氧产率。
臭氧系统包括发生器本体、气源与进气控制系统,冷却系统,臭氧投加系统,尾气破坏系统等。
臭氧发生器各部件图示检查进气管与空气进口连接,出气管与臭氧出口连接是否正确,进气与出气管的位置不能接反。
院感监测SOP

院感监测操作规程一、目的:为了预防和控制医院感染,提高医疗质量,确保医疗安全,需定期对院内感染相关的各项目进行监测,并及时发现院内感染薄弱环节及存在问题,为采取控制感染措施提供依据。
二、内容:根据本院实际情况,需做院感监测的项目包括空气培养,手卫生,一次性物品细菌培养,无菌物品培养,高压锅灭菌效果生物监测,物体表面细菌培养,紫外线灭菌效果监测。
三、操作规程1、层流手术室定义不同级别的层流手术室,其空气洁净度标准不同1).百级层流手术室的标准:每立方尺空气中三0.5um的尘粒数W100颗(或每升空气中W3.5颗)。
可做关节置换、器官移植、脑外科、心脏外科、眼科等手术。
(本院无)2).千级层流手术室的标准:每立方尺空气中三0.5um的尘粒数W1000颗(或每升空气中W35颗)。
本院有1间手术室,作为I类切口无菌手术,如整形外科、胸外科肝胆胰外科等手术。
3).万级层流手术室的标准:每立方尺空气中三0.5um的尘粒数W10000颗(或每升空气中W350颗)。
本院有7间手术室,作为H类切口,如单睑、鞍鼻等手术。
4).十万级层流手术室的标准:每立方尺空气中三0.5um的尘粒数W100000颗(或每升空气中<3500颗)。
本院有5间手术室,作为m类切口手术。
5).洁净辅助用房:本院为万级和10万级。
2、洁净手术室、洁净辅助用房要求表1.洁净手术室的等级标准等级 沉降法细菌最大平均浓度物体表面最大染菌密度(个/cm 2) 空气洁净度级别I局部:0.2个/30min •①90皿(5个/m 3) 其他区域:0.4j /30min •①90皿(10个/m 3)5个/m s局部:100级其他区域:1000级II 2j /30min •①90皿(50个/m 3) 5个/m s 10000级 m4j /30min •①90皿(150个/m 3) 5个/m s 100000级 W5j /30min •①90皿(175个/m 3)5个/m s300000级2、层流手术室静态空气净化效果的监测:1)设备材料:90mm 培养皿,普通培养基,37℃温箱.2)采样时间:洁净手术室房间清洁并搽拭消毒后状态,然后进行测试,室内应无工作人员。
标准操作规程(SOP)——实验动物的处死和处置
一、目的
实验动物的处死和处置是进行动物试验的重要步骤。
在许多动物实验中,必须处死的实验动物应采用安死术,以减少动物不必要的痛苦。
二、适用范围
适用于中国国家流感中心的所有技术人员对实验动物进行处死和处置。
三、程序
(一)生物安全要求
接种过H5、H7亚型高致病性禽流感病毒,H2N2亚型流感病毒的动物处死和处置操作需要在动物生物安全三级实验室(ABSL-3)进行。
其它动物处死和处置操作需要在动物生物安全二级实验室(ABSL-2)中进行。
(二)材料
1.实验动物:中小型实验动物,如:小鼠、大鼠、豚鼠、兔等。
2.其他:注射器、手术刀、药物等。
(三)实验步骤
1.大鼠和小鼠的处死
(1)颈椎脱臼法
1)操作者穿上工作服,戴上口罩和手套,将小鼠或大鼠放在表面粗糙的台面上,用左手拇指、食指按住鼠的头部。
2)右手将鼠尾根部用力向后上方拉,导致颈椎脱臼,动物立即死亡。
3)实验完成后将动物尸体放入生物安全袋中,集中焚烧处置。
(2)击打法
1)实验者穿上工作服,戴上口罩及手套。
2)右手抓住鼠尾,提起,用力摔击其头部,鼠痉挛后立即死亡。
3)用小木锤用力击打鼠头部也可致死。
4)实验完成后将动物尸体放入生物安全袋中,集中焚烧处置。
标准操作规程(SOP )——死和处置。
空压系统操作SOP
阿特拉斯·科普柯GA37 VSD+型单级喷油螺杆空气压缩机标准操作规程【目的】为规范口服固体制剂车间空气压缩机组的设备运行操作、维护保养和统一管理,促进安全作业的规范化、制度化。
【范围】本文制定了口服固体制剂车间一层空压站,阿特拉斯·科普柯空压机组的操作规程。
本文件仅适用于阿特拉斯·科普柯GA37 VSD+ 型风冷式喷油螺杆空气压缩机组的安全操作及保养方法。
【职责】设备管理员负责机组设备的定期维护、保养和统一管理。
操作人员负责机组设备的日常安全使用、清洁卫生和填写使用记录。
【要求】设备操作人员,要求熟悉设备安全操作规程,正确操作空气压缩机组,保证机组正常运行。
操作人员对设备负有保管和维护责任,未经管理人员批准,不准他人乱动、无关人员操作设备。
设备启动后,不能擅自离开操作岗位。
多人操作同一设备时,应严格履行交接班检查手续。
设备发生故障后,应立即停机,保护现场,报告事故发生过程和情节,以查证原因,妥善处理。
【设备主要部件】压缩机主机、驱动电动机、电柜、空气过滤器、贮气罐、空气冷却器、油冷却器、制冷剂干燥机、电子排污、Elektronikon® Graphic 控制器、冷却风扇、油过滤器、油分离器、排水排气阀门、压缩空气系统管路和机组排卸水管路等。
【工作原理简介】阿特拉斯·科普柯GA 37 VSD+ 空气压缩机组是由内部永磁电动机驱动的单级喷油螺杆压缩机。
压缩机是风冷式压缩机,装在隔音机身中。
压缩机由阿特拉斯·科普柯的Elektronikon® Graphic 电脑控制器面板控制。
电柜位于面板后面的机身中,包含保险丝、变压器和继电器等。
压缩机采用变速驱动技术,可根据压缩空气需求量自动调节电动机转速。
气流:空气通过过滤器(AF) 和进气阀(IV) 进入,并在压缩机主机(E) 中压缩。
压缩空气和油的混合物将流入贮气罐/油分离器(AR)。
标准操作流程(SOP)编写指南

标准操作流程(SOP)编写指南(XMABR20-1-2012.内部)1 总则 (1)1.1目的 (1)1.2范围 (1)1.3篇章 (1)2 术语和定义 (1)2.1标准操作流程(SOP) (1)2.2关键控制点 (1)3 SOP编写原则 (1)4 SOP编写要点 (1)4.1 SOP编制流程 (2)4.2 SOP文件分类及审批要求 (2)4.3 SOP的组成要求、模版 (3)5 附则 (8)1 总则1.1目的为规范标准操作流程(SOP)的编写,根据相关标准化的文件要求,及结合本公司的特点,特制定本编写指南。
1.2范围本指南适用于XMABR集团成员企业。
1.3篇章本指南共分为5章,2个附录。
2 术语和定义2.1标准操作流程(SOP)SOP,是Standard Operation Procedure三个单词中首字母的大写,即标准作业流程,是将某一事件的标准操作步骤和要求以统一的格式描述出来,用来指导和规范日常的工作;是对某一程序中的关键控制点进行细化、量化和最优化的操作层面的程序。
2.2关键控制点能够控制并使过程中的不利因素得到预防、消除或降低到可接受水平的某一点、某一步骤或程序。
3 SOP编写原则SOP编写须具备条理化、规范化、形象化;清晰的逻辑性;准确性、精确性、可操作性;以及便于核查或考核。
4 SOP编写要点4.1SOP编制流程SOP编制涉及的相关部门需要履行的职责,及具体的操作流程依此编制流程图执行。
SOP编制流程图14.2SOP文件分类及审批要求4.2.1SOP的分类公司依据不同管理需求将SOP分为生产、技术与质量、环境与安全、研发、采购、营销行政管理、财务、环境及职业健康、信息、检测、工程设计服务、标准化及内部审核等类别。
4.2.2SOP的审批各类型的SOP的审核审批权限按表1规定执行。
4.3SOP的组成要求、模版4.3.1SOP的模式分类SOP的标准模式分为文字描述模式及图表描述模式,两者的区别在于图表模式增加了操作示意图,操作示意图的表现模式应采用实物的照片、实物模型的示意图形。
737 SOP

3 燃油面板……………………………………………………..设定
核实发动机燃油活门关灯…………………………………暗亮
核实翼梁燃油活门关灯……………………………………暗亮
2007 年 4 开关………………..…..关并且“活门开”灯灭 油滤旁通灯………………………………………………熄灭 燃油泵电门…………………………………………….……关 4 电气面板 ……………………………………………….…检查 电瓶电门 …………………………………………….护盖盖好 厨房电源电门……………………………………….….…..接通 备用电源电门……………………自动,备用汇流条断开灯灭 发电机恒速传动脱开电门(CSD/IDG)……….红色护盖盖好 发电机恒速传动装置温度电门……………...在“IN”进口位 汇流条转换电门……………………………….…………..自动 5 跳开关灯控制旋钮和顶板灯光控制旋钮…………………..按需 6 设备冷却电门…………………………....正常位、“断开”灯灭 7 紧急出口灯电门…………………………………….预位,盖好
注:—如需要,也可使用“交输活门”使中央油箱的右增压泵工 作提供 APU 燃油。
2007 年 4 月
飞行技术管理部
9
标准操作程序
—300 型飞机一旦使用了中央油箱供油 APU 运转,不建议在 中央油箱燃油耗完之前再次关闭中油箱泵,以防止收油泵 工作将中央油箱剩余燃油打入左油箱,造成人为的左右平 衡超出限制。
2007 年 4 月
飞行技术管理部
3
标准操作程序
2007 年 4 月
飞行技术管理部
4
标准操作程序
飞机依靠自身动力移动(滑行,飞行)后驾驶员责任区分工:
1 左座为操纵飞行员:
SOP1-G-00021空调净化系统空气过滤器维护保养标准操作规程

1 目的规范空调净化系统空气过滤器的维护保养,保证净化空调系统正常运行保证洁净区有效的洁净度。
2 范围厂区内所有的净化空调系统初、中、高效过滤器和回排风窗过滤器的清洗、更换等。
3 职责空调净化系统操作员、设备部、制造部、质检部和质保部。
4 内容4.1 空调净化系统新风经过初效、中效、高效三级过滤器过滤,回风经过回风过滤、中效、高效三级过滤器过滤。
4。
2 初中效过滤器和回排风过滤器的清洗和更换4。
2.1 净化空调系统机组内初效过滤器每六个月清洗一次,另过滤器前后压差达到上次清洗或更换后压差(初始压差)两倍应清洗。
4。
2。
2 净化空调系统机组内初效过滤器每二年更换一次,可更换新的,也可更换替换下来的中效过滤器.4。
2.3 净化空调系统机组内中效过滤器每年清洗一次,另过滤器前后压差达到上次清洗或更换后压差(初始压)两倍应清洗。
4。
2。
4 净化空调系统机组内中效过滤器每二年更换新的。
更换下来的中效过滤器经清洗检查无破损和无明显蹭损的可作为初效过滤器使用。
4.2.5 初中效过滤器的清洗按《空调净化系统初中效过滤器清洁标准操作规程》执行。
4。
2.6 初中效过滤器清洗后应及时装回,暂时不用的要用清洁塑料袋装好妥善保存避免长霉和长虫。
4。
3 洁净厂房内回风口排风口过滤器每年清洗或更换一次,男女更衣室及有活性炭称量使用区域、称量室、培养基制备间回风口过滤器每六个月检查一次,根据检查结果进行清洗或更换,每年至少清洗一次。
4.4 洁净厂房内送风口高效过滤器和层流净化工作台高效过滤器每年检查一次密封及渗漏情况,如出现下列情况应更换。
4.4.1 风速或换气次数降到最低限即使清洗更换初效和中效空气过滤器后,仍达不到要求时.4。
4。
2 送风口阀门调到最大后,室内仍不能保持规定的正压。
4。
4.3 高效过滤器出现无法修补的渗漏.4。
5 药品直接接触压缩气、惰性气体过滤器根据厂家提供的标准检查并清洁或更换;0.22μm除菌过滤器(包括呼吸器)每三个月检查一次,应保持清洁,完整性应符合要求。
酒店客房SOP

酒店客房SOP一、概述本文档旨在规范酒店客房服务流程,确保每位客人在入住过程中能够享受到优质的服务。
酒店客房SOP(Standard Operating Procedures)是指一系列标准化的操作流程和准则,以确保酒店客房服务的一致性和高效性。
二、预定客房1.客人预订客房时,接待员应了解客人的需求并根据可用房间进行推荐。
2.在确认房间预订时,需要记录客人的姓名、联系方式、预计入住日期和时间、预计离店日期等信息。
3.确认客房预订后,需要发送确认邮件或短信给客人,并保留相关记录以备查档。
三、入住登记1.客人抵达酒店时,接待员应友好地迎接并引导客人前往前台办理入住手续。
2.接待员应核对客人的身份证件,并录入相关信息,包括姓名、身份证号码、国籍等。
3.验证客人预订信息并确认入住日期和房型,告知客人入住所需的押金和预付款项。
4.提供客人需要的酒店设施和服务的相关信息,例如早餐时间、健身房位置等。
5.客人交付押金和预付款项后,接待员应提供房卡和房间号码,引导客人前往客房。
四、客房清洁服务1.物业部门应定期检查房间清洁情况,确保满足卫生标准。
2.客房清洁员应遵循清洁操作流程,包括更换床单、清洁卫生间、擦拭家具等。
3.清洁员应定期更换浴巾和毛巾,并补充酒店提供的洗漱用品。
4.客人可提出额外清洁需求,清洁员应及时响应并满足客人需求。
五、客房维修及维护1.物业部门应定期检查客房设施设备的完好情况,如空调、电视等。
2.客人如发现房间设施存在问题,应及时向前台报告,前台将通知维修部门进行维修或更换。
3.维修部门应快速响应,并在24小时内解决问题,确保客人的满意度。
六、退房结算1.客人在离店前需办理退房手续,将房卡交还给前台。
2.前台应核对客人的入住记录,检查客房设施是否完好,处理客人的押金退还事宜。
3.结算时,需详细列明客人的消费项目和费用,包括房费、餐饮费用、电话费等,并与客人确认无误。
4.为客人提供发票并解答客房费用的相关问题,若客人需要电子发票,应提供下载链接。
车间SOP

车间SOP培训主要内容:1.车间SOP的总则2.各车间的SOP要求摘要第一部分:车间SOP总则总则:质量管理体系术语⏹1 质量:一组固有特性满足要求的程度。
⏹2 批:在规定限度内具有同一性质和质量,并在同一连续生产周期中生产出来的一定数量的产品为一生产批。
⏹3 批号:以一组数字(或字母加数字)作为识别标记,谓之“批号”。
产品每一生产批都有指定的永久批号。
产品的批号一旦确定,所有用于生产的原料、包装材料、半成品、成品及品管部的分析、批准都以此作为主要鉴别标志。
根据批号,应能查明该批产品的生产时间及批生产记录(或生产标准书),进行追溯该批产品的生产历史。
⏹4 不合格品:验收结果值与标准规定(或要求)不相符合的物品。
⏹5 质量异常:操作方法、过程、结果与质量标准规定不相符合者。
⏹6 “三不”制度:公司-“不合格原物料不使用、不合格半成品不下传、不合格成品不出厂”。
车间-“不接不良品、不做不良品、不传不良品”。
⏹7 “三检”制度:专检、互检、自检。
品管部现场品管为专职检验员、生产部班组长为兼职检验员实行抽检、各岗位员工自行检查本岗位产品质量。
⏹三不制度与三检制度必须领会⏹8 未经职权部门确认,不得私自修改质量标准、作业指导书和使用无效的质量文件。
⏹9 乳化间、半成品膏体储存间、灌装间、清洁容器储存间的空气质量必须符合标准规定。
⏹10 以上车间如果出现一次空气微生物超标,品管部则须将不合格结果交由工厂进行纠正,如对空气进行消毒或进行局部的重点消毒;如连续两次出现空气微生物超标,则必须采取切实有效的纠正预防措施消除不合格原因;如连续出现三次空气微生物超标,则需进行停产整顿。
⏹11膏体存放不得超过15天,如果超过需要重新送检。
⏹12 包装材料消毒操作必须按规定程序进行,不得随意缩短时间。
工作必须提前做好准备⏹13 纯化水检验项目中微生物、pH值、电导率任何一项出现不合格应进行纠正,连续两次检验不合格,应进行停产整顿。
SOP090012 (04-2)洁净区工作服、工作鞋收集、清洗、烘干、灭菌、发放标准操作规程

1.标准操作规程目的: 规范洁净区工作服、工作鞋收集、清洗、烘干、灭菌、发放程序, 防止污染与交叉污染。
2.适用范围: 本文件适用于洁净区所有的洁净服、工作鞋。
3.责任3.1 本文件由生产部指定人员起草, 生产部经理审核, 质保部经理审核, 生产副总经理批准。
3.2 洁净区洗衣操作人员负责按照本文件实施操作。
3.3 车间工艺员、质管员负责监督和检查, 确保洗衣操作符合规范。
4.内容4.1 一般原则洁净区工作服、工作鞋的管理按《工作服、工作鞋标准管理规程》SMP090029规定执行。
4.2 清洗原则4.2.1 C级、D级区洁净服、工作鞋必须分别在本区域的洗衣间中清洗、烘干。
4.2.2 小容量注射剂车间B级区无菌内衣、无菌外衣、无菌鞋必须在C级区无菌衣洗衣间内进行清洗、灭菌。
4.2.3 小容量注射剂车间B级区无菌内衣、无菌外衣、无菌头罩、无菌口罩、无菌鞋应分开清洗。
无菌内衣、无菌外衣、无菌头罩使用同一台洗衣机清洗, 但是需要按照先内衣后外衣的顺序清洗。
无菌鞋、无菌口罩人工手洗。
4.4 清洗设备4.5 清洗频次4.5.1 D级洁净服的清洗为每班1次。
4.5.2 C级洁净服的清洗为每班1次。
4.5.3 B级区无菌(内衣、外衣)、无菌头罩、无菌口罩、无菌鞋为每次更换后清洗灭菌一次。
4.5.4 更换周期为D级区每班1次。
C级区每班1次。
B级区无菌衣、无菌鞋每次离开本区域均需更换。
4.6 清洗用水、清洗剂4.6.1 清洗用水纯化水、饮用水。
4.6.2 清洗剂洗衣液。
4.7 准备4.7.1 人员按《人员进出洁净区更衣标准操作规程》SOP090009更衣后进入操作间。
4.7.2 按《全自动洗衣机清洁标准操作规程》SOP050017对全自动洗衣机进行生产前清洁。
4.7.3 按《MQSO.36-00型脉动真空灭菌柜清洁标准操作规程》SOP052029对脉动真空灭菌柜进行生产前清洁。
4.7.4 各级别洗衣间按《洁净区操作间清洁消毒标准操作规程》SOP090019进行生产区清洁。
制药公司高空作业SOP
制药有限公司1 主题内容与适用范围1.1 本规程适用于本公司各外来单位、各部门、各车间进行高空作业的安全管理。
1.2 高空作业:按照《高处作业分级》(GB/T3608-93)标准中规定的作业。
2 目的为规范公司内高空作业的安全管理,控制和消除生产过程中的危险和隐患,实现安全生产。
3 术语高空作业:指凡距坠落高度基准面2米及以上,在有可能坠落的高处进行的作业。
坠落高度基准面:指从作业位置到最低坠落着落点水平面的距离。
4 相关文件SG01-06 《危险作业安全管理制度》SG01-39 《安全检维修管理制度》SG01-45 《安全作业管理制度》5 职责5.1 工程中心负责公司内高空作业手续办理和安全作业过程的监护检查。
5.2 各外来单位、各部门、各车间应保证高空作业安全措施的落实,认真执行高空作业规程。
6 内容6.1 高空作业6.1.1 分级6.1.1.1 作业高度在2~5米时,称为一级高空作业。
6.1.1.2 作业高度在5米以上至15米时,称为二级高空作业。
6.1.1.3 作业高度在15米以上至30米时,称为三级高空作业。
6.1.1.4 作业高度在30米以上时,称为特级高空作业。
6.1.2 分类6.1.2.1 特殊高处作业6.1.2.1.1 在阵风风力为 6级(风速 10.8米/秒)及以上情况下进行的强风高处作业。
6.1.2.1.2 在高温或低温环境下进行的异温高处作业。
6.1.2.1.3 在降雪时进行的雪天高处作业。
6.1.2.1.4 在降雨时进行的雨天高处作业。
6.1.2.1.5 在室外完全采用人工照明进行的夜间高处作业。
6.1.2.1.6 在接近或接触带电体条件下进行的带电高处作业6.1.2.1.7 在无立足点或无牢靠立足点的条件下进行的悬空高处作业。
6.1.2.2 化工工况高处作业6.1.2.2.1 在坡度大于45°的斜坡上面进行的高处作业。
6.1.2.2.2 在升降(吊装)口、坑、井、池、沟、洞等上面或附近进行的高处作业。
新华医用空气净化消毒器的SOP

新华医用空气净化消毒器的SOP一、目的:新华医用空气净化消毒器的使用和一般维护的标准操作规程。
二、范围:新华医用空气净化消毒器的操作和维护。
三、产品用途应用手术室住院,病房,候车室的空气质量,细菌浓度为控制环境四、原理利用纳米过滤器+儿茶素过滤+ TiO 2光催化,负 + +臭氧和紫外线,烟尘过滤器+ +空气加湿组合的协同作用,在相对封闭的微环境,通过循环风机不断循环治疗室在空气中,空气净化,消毒,降解有机化合物。
1.2检测装置 dly-3式空气离子测量仪,n962a式,4480-2式风速计臭氧测量仪器,ty-9600a式,ld-3c型声级计电脑激光尘埃测量仪,ty-9500型一氧化碳检测仪,m-400型甲醛分析仪,中文全称:Ⅱb202撞击微生物采样器。
1.3个测试项目一氧化碳,可吸入颗粒物,细菌,甲醛,温度,相对湿度度,噪声,风量,臭氧,空气负离子。
1.4试验方法在体积(350厘米,310厘米,290厘米××封闭实验室),人工加入超过gb18883-2002《室内空气质量标准》的极限浓度可吸入颗粒物,一氧化碳,甲醛等物质,仿真实验环境。
柜式空气消毒kj360-cmd医疗中心区,连续运行150分钟,0分钟,60分钟,120分钟,150分钟的时间部分,从检测孔在每个工作状态的空气净化和消毒效果检测项目。
五、操作流程1、使用时应关闭门窗,以避免室内尘埃污染。
2、按照不同型号的消毒器说明书设置消毒时间、风速、风向等操作程序。
如循环风紫外线空气消毒器,在密闭房间开机到达说明书指定时间后可达消毒效果,继续开机,可在有人情况下持续消毒作用;臭氧空气消毒器适用室内无人条件下空气的消毒,消毒结束后开窗通风30-60分钟后(参照不同型号消毒器说明书)人员方可进入消毒现场。
六、保养1、无程控定时装置及时间累计装置的消毒设备应做好消毒器使用记录,如消毒器开启时间、结束时间、紫外灯累积使用时间、紫外线辐照监测强度等相关记录。
SOP标准模板

1)。首先需检查封口牢固,日期打印正确,清晰,位置正确
2)。检查Bag封边美观性
3).按规定包数理袋,协助装箱
1.编箱
1).按产品规格每板数量准备Cas编箱
2).编好每板的第一只Case必须给领班检查
3).生产结束前或品种换型时编箱控制
*AIOBAG:
200~280℃
*SPBAG:240~300℃
*PE Bag:
150 ~180℃
*按《品管公报》
*使用时由上而下一层一层拿
*CASE扎线应放于垃圾袋中
*指示灯绿色7.5*500CM
*胶带无封斜, Case中缝无漏缝,无漏封
*设定检重值: Pouch标准值* Pouch数+空Bag值*Basg数+Cas均值
8)。下班前关掉电源进行清洁
1)。按工单上生产的品种准备Bag
2)。将Bag背面朝上放置于操作平台上,并挑出不良品
3)。双手将下层输送带上的Pouch (5~10)包揽于操作平台上
4).检查Pouch并整齐装入Bag
5).把装好的Bag背面朝上,放于上层输送带上
1)。电子秤放于平稳的操作台上,调水平
4)。环境卫生保持清洁
2.将封箱机插上电源(380V),打开开关
3.检查封箱机的运行状况
4.取一Case放于封箱机上,底部先宽度方向对折,后长度方向对折,然后用同样方式折Case上部
5.以Case的宽度和高度调整封箱机
6.按《品管公报》装箱
7.把Case上部宽度对折,再长度对折后,平稳送入封箱机内,自动封箱
b.高度:调整摇杆,归正轮上沿高度与Case高度一致
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空三作业流程
空三作业主要使用的软件是
1.转黑白tif:
作业数据是否需要转换,分批转换的时间和位置的记录。
具体操作如下:
设置参数如下:
黑白tif的输出路径
将输出路径里的设置更改如图所示:
另外,如果作业数据需要转换的数量很大的话可以建立批处理如下:
2.转金字塔影像:
首先查看是否需要生成金字塔影像,若需要,具体操作如下:
生成金字塔影像的设置如下:
可以看到没有金字塔影像OVM显示为0或者其他数值时(比如-1),金字塔影像有错误;对应每个片子生成正确的金字塔影像时,OVM会显示为10,如果这个数字不是10的话要检查金字塔影像是否有问题(金字塔影像为9.或者统一数值也是没有问题)
3.EO文件的编辑:
记录使用GPS的数量和航线数量。
GPS由6个元素组成(x,y,z,omega,phi,kappa)每个航线用#隔开,如图
4.控制点的编辑:一般控制点的文件是GRD格式,也有TXT等形式
5.建工程:记录GPS数量,航片数量,平均地面高度设置,单位和角度。
相机是否齐全。
Prj建立的过程操作如下:
而Pixel size 的设置根据相机的不同分为几种:量测相机一般为20,DMC相机为12,而UCD的为9。
当设置好参数之后点击新的Prj就建立好了。
6.检查航片与相机是否对应好,每条航线与相机的对应关系及翻转情况
7.内定向:问题记录,内定向残差报告。
若为DMC相机,无需做内定向;而量测相机即普通相机一般都需要做内定向。
内定向的步骤以及设置如下:
选择一张tif或者一条航线(也可以全选整个工程中tif),点击鼠标右键,如下图,可以更改tif的方向
每条航线可以手动先做一个,确
定每条航线的方向,然后自动一个,确定自动内定有没有错误,然后可以批量处理。
下图是手动内定向时tif应该怎样对应方向,需要内定向的工程,内定向非常重要,如果内定向中出错,后面的工作都是无用功。
8.分区:分成几个区,分区的方法,分成N个Prj,在一个Prj里分N个子
区。
如果作业量很大的话看情况分成几个小区。
编辑prj,
9.连点
a.连点记录,时间段,机器,分区情况等(海的片子是否删掉,有的话要记录。
)
b.第一次自动连接的情况;(自动连接点的时间,手动连接点时间)
c.有没有漏点的或漏片;控制点情况。
下面是自动连点的设置以及步骤
10.解算
解算的时间,问题记录,其它问题的记录。
解算的参数设置如下:
解算结束后会生成一个报告即aat.html.用打开报告查
看解算完毕之后可以点查看连点情况,确认少点的地方存在什么问题。
并在缺少相点的地方追加相点
设置完毕之后点,并选择最后一个,显示连点的情况
11.平差
具体操作如下:
12.成果的输出:
输出成果的文件类型;文件数目;一些问题的记录。
Pat-b的输出操作如下:。