simulink仿真全参数设置
Simulink仿真参数设定
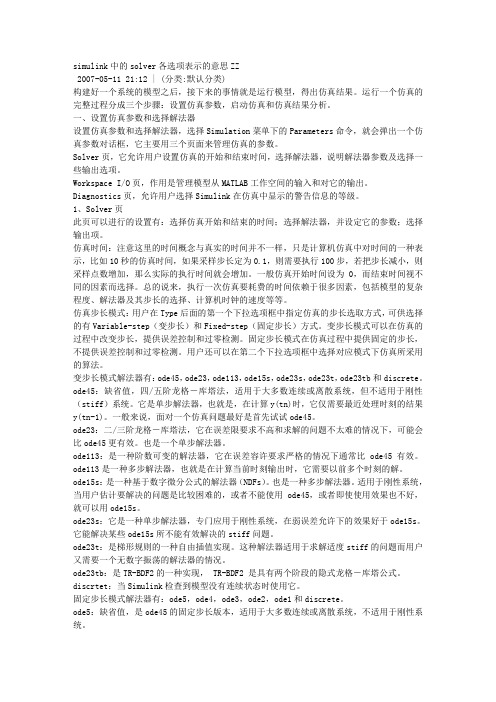
simulink中的solver各选项表示的意思ZZ2007-05-11 21:12 | (分类:默认分类)构建好一个系统的模型之后,接下来的事情就是运行模型,得出仿真结果。
运行一个仿真的完整过程分成三个步骤:设置仿真参数,启动仿真和仿真结果分析。
一、设置仿真参数和选择解法器设置仿真参数和选择解法器,选择Simulation菜单下的Parameters命令,就会弹出一个仿真参数对话框,它主要用三个页面来管理仿真的参数。
Solver页,它允许用户设置仿真的开始和结束时间,选择解法器,说明解法器参数及选择一些输出选项。
Workspace I/O页,作用是管理模型从MATLAB工作空间的输入和对它的输出。
Diagnostics页,允许用户选择Simulink在仿真中显示的警告信息的等级。
1、Solver页此页可以进行的设置有:选择仿真开始和结束的时间;选择解法器,并设定它的参数;选择输出项。
仿真时间:注意这里的时间概念与真实的时间并不一样,只是计算机仿真中对时间的一种表示,比如10秒的仿真时间,如果采样步长定为0.1,则需要执行100步,若把步长减小,则采样点数增加,那么实际的执行时间就会增加。
一般仿真开始时间设为0,而结束时间视不同的因素而选择。
总的说来,执行一次仿真要耗费的时间依赖于很多因素,包括模型的复杂程度、解法器及其步长的选择、计算机时钟的速度等等。
仿真步长模式:用户在Type后面的第一个下拉选项框中指定仿真的步长选取方式,可供选择的有Variable-step(变步长)和Fixed-step(固定步长)方式。
变步长模式可以在仿真的过程中改变步长,提供误差控制和过零检测。
固定步长模式在仿真过程中提供固定的步长,不提供误差控制和过零检测。
用户还可以在第二个下拉选项框中选择对应模式下仿真所采用的算法。
变步长模式解法器有:ode45,ode23,ode113,ode15s,ode23s,ode23t,ode23tb和discrete。
matlab simulink pid参数设定技巧
matlab simulink pid参数设定技巧
在Simulink中进行PID参数设定时,可以采用以下技巧:
1. 使用PID自动调节工具箱:Simulink提供了PID自动调节工具箱,可以根据系统的特性自动计算PID参数。
使用该工具
箱可以简化参数设定过程,提高调节效果。
2. 使用试控制法:试控制法是一种通过观察系统响应来调节PID参数的方法。
可以通过设置比例增益Kp,观察系统的响
应特性,根据实际需求调整Kp的大小。
3. 逐步调节参数:可以通过逐步调节参数的方式获取最佳结果。
首先调节比例增益Kp,观察系统响应;然后调节积分时间Ti,观察系统稳态误差;最后调节微分时间Td,观察系统对变化
的响应。
4. 增加反馈路径:在PID控制器中增加反馈路径,可以减小
系统误差。
可以使用仿真结果和实验数据来进行参数调整,并优化PID参数。
5. 使用频域分析:通过分析系统的频域特性,可以更好地调节PID参数。
可以使用Bode图来观察系统的稳定性和幅频响应
特性,调整PID参数以获得更好的控制效果。
6. 考虑系统时间常数:系统的时间常数是影响PID参数设定
的重要因素之一。
根据具体的系统响应特性,合理选择PID
参数的大小和调整范围。
7. 进行参数整定实验:通过设计合适的实验,观察系统响应,可以更准确地确定PID参数。
可以通过改变输入信号的大小、频率等,观察系统的稳态误差、超调量等指标,调整PID参
数以达到设计要求。
simulink修改参数循环仿真
simulink修改参数循环仿真摘要:1.Simulink 简介2.修改参数循环仿真的意义3.修改参数循环仿真的步骤4.Simulink 在修改参数循环仿真中的应用案例5.总结正文:一、Simulink 简介Simulink 是MathWorks 公司开发的一款与MATLAB 相结合的仿真工具,主要用于动态系统建模、仿真和分析。
用户可以利用Simulink 提供的各种功能模块,轻松地构建复杂的系统模型,并进行仿真实验。
这使得工程师和研究人员在设计、开发和优化系统时,可以更加高效地验证其性能和可行性。
二、修改参数循环仿真的意义在实际应用中,系统的参数往往会受到各种因素的影响而发生变化。
为了更准确地分析和评估系统的性能,需要对这些参数进行调整,并在不同的参数条件下进行多次仿真实验。
修改参数循环仿真正是针对这一需求而设计的。
通过修改参数循环仿真,可以更加全面地了解系统在不同参数条件下的表现,从而提高系统的可靠性和稳定性。
三、修改参数循环仿真的步骤修改参数循环仿真的具体步骤如下:1.创建Simulink 模型:首先,根据系统的需求,在Simulink 中搭建相应的模型。
这包括添加各种功能模块、设置模块的参数以及连接模块之间的信号。
2.编写循环:在MATLAB 脚本中,使用循环结构(如for 循环或while 循环)来控制仿真过程中参数的修改。
在每次循环中,改变Simulink 模型中相应的参数值,并调用Simulink 进行仿真。
3.获取仿真结果:在每次循环中,仿真完成后,需要获取相应的仿真结果。
这些结果可以包括系统的输出信号、性能指标等。
4.分析结果:对获取到的仿真结果进行分析,以了解系统在不同参数条件下的表现。
这有助于确定系统的最优参数配置,从而提高系统的性能。
四、Simulink 在修改参数循环仿真中的应用案例假设我们要分析一个车辆的行驶性能,需要考虑的因素包括发动机的转速、轮胎的摩擦系数、空气阻力等。
Simulink仿真操作基本教程
◼ 在 Simulink 模 型 或 模 块 库 窗
口内,用鼠标左键单击所需 模块图标,图标四角出现黑 色小方点,表明该模块已经 选中。
c) 模块拷贝及删除
◼ 在模块库中选中模块后,按 住鼠标左键不放并移动鼠标 至目标模型窗口指定位置, 释放鼠标即完成模块拷贝。
◼ 模块的删除只需选定删除的 模块,按Del键即可。
a) 启动Simulink。
➢ 单击MATLAB Command窗口工具条上的Simulink图标,或者
在MATLAB命令窗口输入simulink,即弹出图示的模块库窗 口界面(Simulink Library Browser)。该界面右边的窗口给出 Simulink所有的子模块库。
➢ 常用的子模块库有 Sources( 信 号 源 ) , Sink( 显 示输出),Continuous(线性连 续系统),Discrete(线性离 散系统),Function & Table (函数与表格),Math(数学 运算), Discontinuities (非 线性),Demo(演示)等。
图9-15 定步长算法
图9-16 变步长算法
第一章 Simulink动态仿真
① Solver页 ➢ Error Tolerance(误差限度): 算法的误差是指当前状态值与当前
状态估计值的差值,分为Relative tolerance(相对限度)和Absolute tolerance(绝对限度),通常可选auto。
第一章 Simulink动态仿真
a) 启动Simulink
① 用鼠标右键点击Simulink菜单项,则弹出一菜单条,点击该菜单
条即弹出该子库的标准模块窗口.如单击左图中的【Sinks】,出现 “Open the ‘Sinks’Library”菜单条,单击该菜单条,则弹出右图所 示的该子库的标准模块窗口。
simulink修改参数循环仿真
simulink修改参数循环仿真Simulink是一款由MathWorks公司开发的系统仿真软件,广泛应用于各种领域,如控制系统、信号处理、通信等。
本文将介绍如何在Simulink中修改参数并进行循环仿真。
一、Simulink简介Simulink提供了一个图形化的环境,用户可以搭建各种复杂的系统模型,并进行仿真实验。
它支持连续时间、离散时间和混合信号系统的建模与仿真,具有丰富的库元件,包括线性元件、非线性元件、信号处理元件等。
二、修改参数的方法在Simulink中,修改参数主要有以下几种方法:1.通过参数对话框:选中需要修改参数的元件,右键点击,选择“Properties”,在弹出的对话框中找到需要修改的参数,进行修改。
2.通过MATLAB脚本:使用Simulink的MATLAB接口,可以直接对模型中的元件进行修改。
例如,可以使用以下代码修改一个双曲正切函数的增益参数:```matlab% 创建一个双曲正切函数元件h = tf("tansig", 1);% 修改增益参数h.Gain = 2;```三、循环仿真的实现在Simulink中进行循环仿真,主要有以下几个步骤:1.创建一个循环结构:可以使用Simulink内置的循环元件,如“For”循环和“While”循环。
2.添加循环变量:在循环结构中,添加一个或多个循环变量,并在仿真过程中对其进行更新。
3.设置循环条件:为循环添加条件,当条件满足时,循环将继续执行。
4.添加仿真时长:为循环仿真设置时长,以确保仿真结果的准确性。
5.运行仿真:启动仿真,观察循环结构中的输出结果。
四、实例演示以下是一个简单的循环仿真实例:1.创建模型:新建一个Simulink模型,添加一个线性环节(如一个积分环节)和一个常数环节。
2.创建循环结构:添加一个“For”循环,设置循环变量为时间变量(如`t`),范围为0到10秒,步长为0.1秒。
3.修改参数:在循环内部,修改线性环节的参数,如积分时间常数。
simulink步长设置

simulin k仿真设置一、算法设置1.变步长(Variabl e—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s和discre t.缺省情况下,具有状态的系统用的是ode45;没有状态的系统用的是dis crete。
1)ode45基于显式Rung e—Kutta(4,5)公式,Dormand—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下。
2)ode23是基于显式Run ge—Kutta(2,3).Bogackt和Shamp ine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器。
3)odell3是变阶Adam s-Bashfor th—Moulton PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDFs(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用ode45s时仿真失败或不够有效时,可以试试ode l5s。
odel5s是基于一到五阶的NDF公式的求解器.尽管公式的阶数越高结果越精确,但稳定性会差一些.如果模型是刚性的,并且要求有比较好的稳定性,应将最大的阶数减小到2.选择odel5s求解器时,对话框中会显示这一参数.可以用ode23求解器代替。
如何使用MATLABSimulink进行动态系统建模与仿真

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
simulink中引用模型中设置的参数
simulink中引用模型中设置的参数在Simulink中引用模型时,可以设置多种参数。
以下是一些主要的参数设置方面:1.参数值的访问与修改:可以通过编程方式访问和修改参数值,主要使用get_param和set_param这两个函数。
例如,可以获取名为'myModel/My Constant'的Constant模块的参数值,或者更改此值。
2.直接指定参数值:在模块的参数对话框中,可以直接指定参数值。
在打开的对话框中,配置数据对象属性,然后在值框中为参数指定一个数值。
3.参数对象:可以配置参数对象,作为生成代码中的可调全局变量。
此外,还可以通过对象控制参数数据类型。
4.使用表达式设置参数值:可以为调用MATLAB函数和运算符(如sin和max)的表达式设置模块参数值。
此外,还可以调用自定义函数来设置模块参数值。
5.模型引用参数设置:在使用模型引用时,需要注意一些特殊的参数设置。
例如,如果配置参数中的“代码生成”>“标识符”参数的设置不包含表示引用模型名称的R令牌,则代码生成会将R令牌附加到标识符格式之前。
此外,还需要注意在使用模型引用时的命名要求和最大标识符长度参数。
6.其他参数设置:还有其他一些参数设置,如选择模型引用窗格上的“最小化代数循环出现次数”参数,以最大程度地减少代数循环的出现次数。
此选项的设置仅影响从模型生成的代码。
还可以使用模型块上的“整数舍入模式”参数来仿真要用于编译从模型生成的代码的C编译器的舍入行为。
总的来说,Simulink中引用模型的参数设置非常灵活且强大,可以根据具体需求进行详细的配置。
simulink仿真参数设置讲解学习

1.变步长(Variable—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s和discret.缺省情况下,具有状态的系统用的是ode45;没有状态的系统用的是discrete.1)ode45基于显式Runge—Kutta(4,5)公式,Dormand—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下.2)ode23是基于显式Runge—Kutta(2,3).Bogackt和Shampine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器.3)odell3是变阶Adams-Bashforth—Moulton PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDFs(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用ode45s时仿真失败或不够有效时,可以试试odel5s。
odel5s是基于一到五阶的NDF公式的求解器.尽管公式的阶数越高结果越精确,但稳定性会差一些.如果模型是刚性的,并且要求有比较好的稳定性,应将最大的阶数减小到2.选择odel5s求解器时,对话框中会显示这一参数.可以用ode23求解器代替。
del5s,ode23是定步长、低阶求解器.5)ode23s是基于一个2阶改进的Rosenbrock公式.因为它是一个单步求解器,所以对于宽误差容限,它比odel5s更有效.对于一些用odel5s不是很有效的刚性问题,可以用它解决.6)ode23t是使用“自由”内插式梯形规则来实现的.如果问题是适度刚性,而且需要没有数字阻尼的结果,可采用该求解器.7)ode23tb是使用TR—BDF2来实现的,即基于隐式Runge—Kutta公式,其第一级是梯形规则步长和第二级是二阶反向微分公式.两级计算使用相同的迭代矩阵.与ode23s相似,对于宽误差容限,它比odtl5s更有效.8)discrete(变步长)是simulink在检测到模型中没有连续状态时所选择的一种求解器.2.定步长(Flxed—Step)求解器可以选择的定步长求解器有:ode5,ode4,ode3,ode2,ode1和discrete.1)ode5是ode45的一个定步长版本,基于Dormand—Prince公式.2)ode4是RK4,基于四阶Runge—Kutta公式.3) ode3是ode23的定步长版本,基于Bogacki-Sbampine公式.4) ode2是Heun方法,也叫作改进Euler公式.5) odel是Euler方法.6) discrete(定步长)是不执行积分的定步长求解器.它适用于没有状态的模型,以及对过零点检测和误差控制不重要的模型.3.诊断页(Diagnostics)可以通过选择Simulation Parameters对话框的Diagnostics标签来指明在仿真期间遇到一些事件或者条件时希望执行的动作.对于每一事件类型,可以选择是否需要提示消息,是警告消息还是错误消息.警告消息不会终止仿真,而错误消息则会中止仿真的运行.(1)一致性检查一致性检查是一个调试工具.用它可以验证Simulink的0DE 求解器所做的某些假设.它的主要用途是确保s函数遵循Simulink内建模块所遵循的规则.因为一致性检查会导致性能的大幅度下阵(高达40%),所以一般应将它设为关的状态.使用一致性检查可以验证s函数,并有助于确定导致意外仿真结果的原因.为了执行高效的积分运算,Simulink保存一些时间步的结果,并提供给下一时间步使用.例如,某一时间步结束的导数通常可以放下一时间步开始时再使用.求解器利用这一点可以防止多余的导数运算.一致性检查的另一个目的是保证当模块被以一个给定的t(时间)值调用时.它产生一常量输出.这对于刚性求解器(ode23s和odel5s)非常重要,因为当计算Jacobi行列式时.模块的输出函数可能会被以相同的t值调用多次.如果选择了一致性检查,Simulink 置新计算某些值,并将它们与保存在内存中的值进行比较,如果这些值有不相同的,将会产生一致性错误.Simulink比较下列量的计算值:1)输出;2)过零点3)导数;4)状态.(2)关闭过零点检测可以关闭一个仿真的过零点检测.对于一个有过零点的模型,关闭过零点检测会加快仿真的速度,但是可能影响仿真结果的精度.这一选项关闭那些本来就有过零点检测的模块的过零点检测.它不能关闭Hir crossing模块的过零点检测.(3)关闭优化I/O存储选择该选项,将导致Simulink为每个模块约I/()值分配单独的缓存,而不是重新利用援存.这样可以充分增加大模型仿真所需内存的数量.只有需要调试模型时才选择该选项.在下列情况下,应当关闭缓存再利用;1)调试一个C-MEX S-函数;2)使用浮点scope或display模块来察看调试模型中的信号.如果缓存再利用打开,并且试图使用浮点scope或display模块来显示缓存已被再利用的信号,将会打开一个错误对话框.(4)放松逻辑类型检验选择该选项,可使要求逻辑类型输入的模块接受双精度类型输入.这样可保证与Simulink 3版本之前的模型的兼容性.4.提高仿真性能和精度仿值性能相精度由多种因素决定,包括模型的设计和仿真参数的选择.求解器使用它们的缺省参数值可以使大多数模型的仿真比较精确有效,然而,对于一些模型如果调整求解器相仿真参数将会产生更好的结果.而且,如果对模型的性能比较熟悉,并且将这些信息提供给求解器,得到的仿真效果将会提高。
simulink修改参数循环仿真
simulink修改参数循环仿真【原创版】目录1.Simulink 简介2.修改参数循环仿真的概念3.修改参数循环仿真的操作步骤4.修改参数循环仿真的应用实例5.总结正文一、Simulink 简介Simulink 是 MathWorks 公司开发的一款与 MATLAB 相结合的仿真工具,主要用于动态系统的建模、仿真和分析。
通过 Simulink,用户可以轻松地创建复杂的系统模型,并进行实时仿真和测试。
二、修改参数循环仿真的概念修改参数循环仿真是指在 Simulink 中,通过循环结构和条件判断,对模型参数进行多次修改,并根据不同的参数值进行多次仿真,以便比较结果的差异,从而找到最优参数。
三、修改参数循环仿真的操作步骤1.创建模型:首先,根据需求创建一个动态系统模型。
2.添加循环结构:在 Simulink 中添加一个循环结构,如 For 循环或 While 循环。
3.编写条件判断:在循环结构内部,编写条件判断语句,用于判断当前参数值是否满足条件。
4.修改参数:根据条件判断的结果,修改模型参数。
5.运行仿真:在每次循环迭代后,运行仿真,得到系统输出结果。
6.分析结果:比较不同参数下的仿真结果,找到最优参数。
四、修改参数循环仿真的应用实例假设有一个车辆行驶模型,其中包含速度、加速度和制动力三个参数。
为了找到最优行驶速度,可以使用修改参数循环仿真。
具体步骤如下:1.创建车辆行驶模型:在 Simulink 中创建一个车辆行驶模型,包括速度、加速度和制动力子系统。
2.添加循环结构:在 Simulink 中添加一个 For 循环,用于遍历不同的速度值。
3.编写条件判断:在循环内部,根据制动力和加速度的大小关系判断是否需要修改速度。
4.修改参数:当制动力大于加速度时,修改速度为当前速度的 1.1 倍;当制动力小于加速度时,修改速度为当前速度的 0.9 倍。
5.运行仿真:在每次循环迭代后,运行仿真,得到车辆行驶的距离。
SIMULINK仿真参数的设置

AbsTol:默认值为1e-6设定绝对误差范围。
Decimation:默认值为1,决定隔多少个点返回状态和输出值。
固定步长模式解法器有:ode5,ode4,ode3,ode2,ode1和discrete。 a) ode5:缺省值,是ode45的固定步长版本,适用于大多数连续或离散系
统,不适用于刚性系统。
b) ode4:四阶龙格-库塔法,具有一定的计算精度。 c) ode3:固定步长的二/三阶龙格-库塔法。 d) ode2:改进的欧拉法。 e) ode1:欧拉法。 f) discrete:是一个实现积分的固定步长解法器,它适合于离散无连续状
b) Singletasking:这种模式不检查模块间的速率转换,它在建立单任务系 统模型时非常有用,在这种系统就不存在任务同步问题。
c) Auto:这种模式,simulink会根据模型中模块的采样速率是否一致, 自动决定切换到multitasking和singletasking。
6) 输出选项
a) Refine output:这个选项可以理解成精细输出,其意义是在仿真输出太 稀松时,simulink会产生额外的精细输出,这一点就像插值处理一样。 用户可以在refine factor设置仿真时间步间插入的输出点数。
d) ode15s:是一种基于数字微分公式的解法器(NDFs)。也是一种多步 解法器。适用于刚性系统,当用户估计要解决的问题是比较困难的, 或者不能使用ode45,或者即使使用效果也不好,就可以用ode15s。
e) ode23s:它是一种单步解法器,专门应用于刚性系统,在弱误差允 许下的效果好于ode15s。它能解决某些ode15s所不能有效解决的stiff 问题。
simulink修改参数循环仿真
simulink修改参数循环仿真摘要:1.Simulink 简介2.Simulink 参数循环仿真3.如何修改Simulink 参数4.Simulink 参数修改对仿真结果的影响5.总结正文:Simulink 是一款由MATLAB 公司开发的用于模型构建、仿真和优化的软件。
它可以帮助用户创建和修改各种动态系统的模型,并进行仿真实验。
在Simulink 中,用户可以通过修改参数来改变模型的行为。
本文将介绍如何使用Simulink 进行参数循环仿真以及如何修改参数。
首先,我们需要了解Simulink 的基本操作。
Simulink 采用模块化的设计方法,用户可以通过拖拽和连接各种模块来构建模型。
模型的参数可以通过Simulink 的参数编辑器进行设置和修改。
参数循环仿真是指在仿真过程中,不断地修改模型的参数,并观察参数改变对仿真结果的影响。
在Simulink 中,我们可以通过设置参数的范围和步长来实现参数循环仿真。
具体操作如下:1.在Simulink 模型中选择需要进行参数循环仿真的模块;2.右键单击模块,选择“参数化”;3.在弹出的参数编辑器中,设置参数的初始值、范围和步长;4.点击“应用”,完成参数设置;5.点击Simulink 工具栏上的“仿真”按钮,启动仿真。
在参数循环仿真过程中,用户可以通过观察输出结果,了解参数改变对模型性能的影响。
这对于系统优化和设计具有很大的帮助。
那么,如何修改Simulink 参数呢?我们以一个简单的例子来说明。
假设我们有一个简单的模型,其中包含一个线性时不变系统模块(LTI)和一个信号源模块(Sine Wave)。
我们想要修改信号源模块的频率参数。
1.打开Simulink 模型;2.双击信号源模块,打开参数编辑器;3.在参数编辑器中,找到“频率”参数;4.修改参数值,例如将频率从1Hz 更改为2Hz;5.点击“应用”,完成参数修改。
参数修改完成后,我们可以通过仿真按钮重新启动仿真,观察修改参数后模型的行为。
simulink仿真全参数设置
1.变步长(Variable—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s和discret.缺省情况下,具有状态的系统用的是ode45;没有状态的系统用的是discrete.1)ode45基于显式Runge—Kutta(4,5)公式,Dormand—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下.2)ode23是基于显式Runge—Kutta(2,3).Bogackt和Shampine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器.3)odell3是变阶Adams-Bashforth—Moulton PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDFs(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用ode45s时仿真失败或不够有效时,可以试试odel5s。
odel5s是基于一到五阶的NDF公式的求解器.尽管公式的阶数越高结果越精确,但稳定性会差一些.如果模型是刚性的,并且要求有比较好的稳定性,应将最大的阶数减小到2.选择odel5s求解器时,对话框中会显示这一参数.可以用ode23求解器代替。
del5s,ode23是定步长、低阶求解器.5)ode23s是基于一个2阶改进的Rosenbrock公式.因为它是一个单步求解器,所以对于宽误差容限,它比odel5s更有效.对于一些用odel5s不是很有效的刚性问题,可以用它解决.6)ode23t是使用“自由”内插式梯形规则来实现的.如果问题是适度刚性,而且需要没有数字阻尼的结果,可采用该求解器.7)ode23tb是使用TR—BDF2来实现的,即基于隐式Runge—Kutta公式,其第一级是梯形规则步长和第二级是二阶反向微分公式.两级计算使用相同的迭代矩阵.与ode23s相似,对于宽误差容限,它比odtl5s更有效.8)discrete(变步长)是simulink在检测到模型中没有连续状态时所选择的一种求解器.2.定步长(Flxed—Step)求解器可以选择的定步长求解器有:ode5,ode4,ode3,ode2,ode1和discrete.1)ode5是ode45的一个定步长版本,基于Dormand—Prince公式.2)ode4是RK4,基于四阶Runge—Kutta公式.3) ode3是ode23的定步长版本,基于Bogacki-Sbampine公式.4) ode2是Heun方法,也叫作改进Euler公式.5) odel是Euler方法.6) discrete(定步长)是不执行积分的定步长求解器.它适用于没有状态的模型,以及对过零点检测和误差控制不重要的模型.3.诊断页(Diagnostics)可以通过选择Simulation Parameters对话框的Diagnostics标签来指明在仿真期间遇到一些事件或者条件时希望执行的动作.对于每一事件类型,可以选择是否需要提示消息,是警告消息还是错误消息.警告消息不会终止仿真,而错误消息则会中止仿真的运行.(1)一致性检查一致性检查是一个调试工具.用它可以验证Simulink的0DE 求解器所做的某些假设.它的主要用途是确保s函数遵循Simulink内建模块所遵循的规则.因为一致性检查会导致性能的大幅度下阵(高达40%),所以一般应将它设为关的状态.使用一致性检查可以验证s函数,并有助于确定导致意外仿真结果的原因.为了执行高效的积分运算,Simulink保存一些时间步的结果,并提供给下一时间步使用.例如,某一时间步结束的导数通常可以放下一时间步开始时再使用.求解器利用这一点可以防止多余的导数运算.一致性检查的另一个目的是保证当模块被以一个给定的t(时间)值调用时.它产生一常量输出.这对于刚性求解器(ode23s和odel5s)非常重要,因为当计算Jacobi行列式时.模块的输出函数可能会被以相同的t值调用多次.如果选择了一致性检查,Simulink 置新计算某些值,并将它们与保存在内存中的值进行比较,如果这些值有不相同的,将会产生一致性错误.Simulink比较下列量的计算值:1)输出;2)过零点3)导数;4)状态.(2)关闭过零点检测可以关闭一个仿真的过零点检测.对于一个有过零点的模型,关闭过零点检测会加快仿真的速度,但是可能影响仿真结果的精度.这一选项关闭那些本来就有过零点检测的模块的过零点检测.它不能关闭Hir crossing模块的过零点检测.(3)关闭优化I/O存储选择该选项,将导致Simulink为每个模块约I/()值分配单独的缓存,而不是重新利用援存.这样可以充分增加大模型仿真所需内存的数量.只有需要调试模型时才选择该选项.在下列情况下,应当关闭缓存再利用;1)调试一个C-MEX S-函数;2)使用浮点scope或display模块来察看调试模型中的信号.如果缓存再利用打开,并且试图使用浮点scope或display模块来显示缓存已被再利用的信号,将会打开一个错误对话框.(4)放松逻辑类型检验选择该选项,可使要求逻辑类型输入的模块接受双精度类型输入.这样可保证与Simulink 3版本之前的模型的兼容性.4.提高仿真性能和精度仿值性能相精度由多种因素决定,包括模型的设计和仿真参数的选择.求解器使用它们的缺省参数值可以使大多数模型的仿真比较精确有效,然而,对于一些模型如果调整求解器相仿真参数将会产生更好的结果.而且,如果对模型的性能比较熟悉,并且将这些信息提供给求解器,得到的仿真效果将会提高。
simulink步长设置
simuli nk仿真设置一、算法设置1.变步长(Variab le—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s 和disc ret.缺省情况下,具有状态的系统用的是o de45;没有状态的系统用的是d iscre te。
1)ode45基于显式Ru nge—Kutta(4,5)公式,Dorman d—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下。
2)ode23是基于显式R unge—Kutta(2,3).Bogack t和Sha mpine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器。
3)odell3是变阶Ad ams-Bashfo rth—Moulto n PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDF s(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用od e45s时仿真失败或不够有效时,可以试试od el5s。
odel5s是基于一到五阶的ND F公式的求解器.尽管公式的阶数越高结果越精确,但稳定性会差一些.如果模型是刚性的,并且要求有比较好的稳定性,应将最大的阶数减小到2.选择odel5s求解器时,对话框中会显示这一参数.可以用ode23求解器代替。
simulink的modelsetting
simulink的modelsettingSimulink,作为MATLAB的一个重要组件,为工程师和研究人员提供了一个强大的图形化建模和仿真环境。
在Simulink中,Model Settings(模型设置)是一个关键的功能,它允许用户深入探索和自定义模型的各个方面,从而确保仿真的准确性和效率。
Model Settings提供了多种配置选项,涵盖了从基本的仿真设置到高级的优化参数。
以下是一些关键的设置及其重要性:Solver(求解器):这是模型设置中最核心的部分,它决定了仿真的时间步长和数值积分方法。
用户可以根据模型的特性和仿真需求选择合适的求解器,如固定步长、可变步长或自适应步长。
Data Import/Export(数据导入/导出):这些设置允许用户定义模型的输入和输出数据格式。
例如,用户可以选择从文件、工作区或其他数据源导入数据,并定义输出数据的格式和存储位置。
Diagnostics(诊断):通过启用诊断选项,用户可以收集有关模型仿真的详细信息,如警告、错误和性能数据。
这些信息对于调试和优化模型非常有价值。
Optimization(优化):Simulink提供了多种优化选项,以提高仿真的速度和效率。
例如,用户可以选择并行计算、自动内存管理等选项,以充分利用计算机资源并加速仿真过程。
Model Referencing(模型引用):这个设置允许用户将一个大模型分解为多个小模型,以便于管理和仿真。
通过模型引用,用户可以轻松地更新和替换子模型,而无需修改整个模型。
总之,Simulink的Model Settings为用户提供了一个全面的工具,用于配置和管理模型的各个方面。
通过深入探索这些设置,用户可以确保仿真的准确性、效率和灵活性,从而更好地满足他们的需求。
simulink修改参数循环仿真
simulink修改参数循环仿真要在Simulink中实现参数循环仿真,您可以按照以下步骤进行操作:1. 创建一个参数变量,在仿真之前先设置好该参数的初始值,例如设置一个变量`param`。
2. 在仿真模型中使用这个参数变量作为输入,在需要使用该参数的模块中将其连接到合适的输入端口。
3. 使用Scope或To Workspace等工具来记录仿真结果。
4. 在仿真结束之后,根据需求修改参数变量的值。
5. 使用循环控制模块(例如For Each或For Loop)来重复执行仿真。
6. 将参数变量传递到模型的输入端口,并设置仿真时间、步长等仿真配置。
7. 在循环内部根据不同的参数值进行仿真。
下面是一个示例模型的代码:```matlabsimTime = 10; % 总仿真时间stepSize = 0.01; % 步长params = [1, 2, 3]; % 参数数组result = zeros(3, simTime/stepSize+1); % 存储仿真结果for i=1:length(params)param = params(i);% 创建仿真模型 syssys = 'your_model'; % 替换为您的模型名称open_system(sys);% 设置模型参数set_param([sys '/param_input'], 'Value', num2str(param));set_param(sys, 'StopTime', num2str(simTime));set_param(sys, 'FixedStep', num2str(stepSize));% 执行仿真simOut = sim(sys);% 获取仿真结果simTime_i =simOut.get('SimulationMetadata').LoggingInfo.SamplingTimes; simData_i = simOut.get('simulationData');result(i,:) = simData_i.signals.values;% 关闭模型close_system(sys, 0);end% 打印结果disp(result);```您可以根据您的模型和循环要求进行修改和调整。
simulink 模块参数
simulink 模块参数摘要:一、引言二、Simulink 模块参数概述1.参数类型2.参数设置3.参数传递三、Simulink 模块参数应用实例1.基本模块参数设置2.复杂模块参数设置四、Simulink 模块参数对仿真结果的影响1.参数对仿真精度的影响2.参数对仿真速度的影响五、总结与展望正文:一、引言Simulink 是MATLAB 中一款强大的建模和仿真工具,广泛应用于各种工程领域的建模与仿真。
Simulink 模块参数是影响仿真结果的关键因素,了解并掌握Simulink 模块参数的设置与调整对于获得准确的仿真结果具有重要意义。
二、Simulink 模块参数概述1.参数类型Simulink 模块参数主要分为两大类:基本参数和高级参数。
基本参数通常包括输入、输出、类型等,用于定义模块的基本属性。
高级参数则根据模块的具体功能而设置,如传递函数、微分方程等。
2.参数设置参数设置是通过对模块参数对话框进行操作完成的。
在Simulink 模块参数对话框中,用户可以对参数进行修改、添加和删除等操作。
为了方便参数设置,Simulink 还提供了参数模板功能,用户可以自定义模板并应用于其他模块。
3.参数传递Simulink 模块参数的传递方式主要有两种:内部传递和外部传递。
内部传递是指模块内部的参数传递,通常在模块内部进行计算。
外部传递是指模块之间的参数传递,通过信号线进行连接。
三、Simulink 模块参数应用实例1.基本模块参数设置基本模块参数设置主要包括输入、输出、类型等设置。
例如,在设置一个线性时不变系统模块时,需要设置输入信号、输出信号和系统类型等参数。
2.复杂模块参数设置复杂模块参数设置通常涉及高级参数,如传递函数、微分方程等。
例如,在设置一个带有控制律的连续时间线性系统模块时,需要设置控制律参数、系统类型以及传递函数等参数。
四、Simulink 模块参数对仿真结果的影响1.参数对仿真精度的影响合理设置Simulink 模块参数能够提高仿真精度,而错误的参数设置可能导致仿真结果失真。
simulink修改参数循环仿真

simulink修改参数循环仿真【实用版】目录1.Simulink 简介2.修改参数循环仿真的概念3.Simulink 中修改参数的方法4.循环仿真的实现5.总结正文一、Simulink 简介Simulink 是 MathWorks 公司开发的一款与 MATLAB 兼容的仿真软件,主要用于动态系统建模、仿真和分析。
通过 Simulink,用户可以轻松地构建、模拟和测试复杂的动态系统,例如控制系统、信号处理系统等。
二、修改参数循环仿真的概念修改参数循环仿真是指在 Simulink 中对模型参数进行多次修改,并根据不同的参数值进行多次仿真运行,以便比较结果的差异和分析系统的性能。
这种方法有助于工程师在设计阶段对系统进行优化,提高系统的性能和稳定性。
三、Simulink 中修改参数的方法在 Simulink 中,用户可以通过以下方法修改模型参数:1.双击模型元件,在弹出的对话框中直接修改参数值。
2.在 Simulink 命令窗口中使用 set 或 edit 命令,通过指定参数名和值来修改参数。
3.使用 MATLAB 命令行窗口,通过调用 Simulink 模型的 set 或edit 函数来修改参数。
四、循环仿真的实现在 Simulink 中,可以通过以下步骤实现循环仿真:1.创建一个新的仿真循环,在仿真循环中添加需要修改的参数。
2.在仿真循环中添加对模型的调用,以实现对模型的仿真运行。
3.编写循环控制语句,例如 for 循环或 while 循环,用于控制仿真次数和参数修改。
4.在循环中依次修改参数值,并调用模型进行仿真运行,以获取每次仿真的结果。
5.将每次仿真的结果进行比较和分析,以评估系统性能和优化设计。
五、总结通过使用 Simulink 进行修改参数循环仿真,工程师可以更加高效地对动态系统进行设计和优化。
simulink中pi参数调节方法
simulink中pi参数调节方法摘要:1.Simulink中的PI控制器简介2.PI参数调节的方法和步骤3.调节PI参数的注意事项4.总结正文:在Simulink中,PI(比例-积分)控制器是一种常用的控制策略,广泛应用于各种控制系统模型中。
PI控制器通过比例和积分两个环节来调节系统的输出,使得系统的响应更加稳定。
本文将详细介绍如何在Simulink中调节PI参数,以实现更优的控制效果。
一、Simulink中的PI控制器简介在Simulink中,PI控制器是一个内置的连续控制器,其传递函数表示为:G(s) = Kp + Ki/s,其中Kp为比例增益,Ki为积分增益。
在搭建PI控制器模型时,需要分别设置比例增益Kp和积分增益Ki。
二、PI参数调节的方法和步骤1.打开Simulink,找到对应的模型文件。
2.在模型编辑器中,添加一个PI控制器模块。
3.双击PI控制器模块,打开参数设置对话框。
4.设置比例增益Kp:根据系统的类型和性能要求,可以在0-100之间调整Kp的值。
一般来说,增大Kp可以提高系统的响应速度,但过大的Kp可能导致系统震荡。
5.设置积分增益Ki:Ki的取值范围也是0-100。
增大Ki可以降低系统的超调量,但过大的Ki可能导致系统响应变慢。
6.调整积分时间常数:在Simulink中,积分时间常数Ti可以通过设置Ki 的值来实现。
Ti的取值应根据系统的响应速度和稳定性要求来进行调整。
7.试错法调整:通过观察系统仿真结果,不断调整Kp和Ki的值,直到达到满意的控制效果。
三、调节PI参数的注意事项1.在调整Kp和Ki时,要兼顾系统的响应速度和稳定性。
过大的Kp可能导致系统震荡,过小的Kp可能导致系统响应慢。
2.当系统存在较大摩擦时,可以适当增大Kp和Ki的值,以提高系统的驱动力。
3.在高温、高压等特殊环境下,需要根据实际情况调整Kp和Ki的值,以保证系统的稳定运行。
四、总结本文对Simulink中PI参数的调节方法进行了详细介绍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.变步长(Variable—Step)求解器可以选择的变步长求解器有:ode45,ode23,ode113,odel5s,ode23s和discret.缺省情况下,具有状态的系统用的是ode45;没有状态的系统用的是discrete.1)ode45基于显式Runge—Kutta(4,5)公式,Dormand—Prince对.它是—个单步求解器(solver)。
也就是说它在计算y(tn)时,仅仅利用前一步的计算结果y(tn-1).对于大多数问题.在第一次仿真时、可用ode45试一下.2)ode23是基于显式Runge—Kutta(2,3).Bogackt和Shampine对.对于宽误差容限和存在轻微刚性的系统、它比ode45更有效一些.ode23也是单步求解器.3)odell3是变阶Adams-Bashforth—Moulton PECE求解器.在误差容限比较严时,它比ode45更有效.odell3是一个多步求解器,即为了计算当前的结果y(tn),不仅要知道前一步结果y(tn-1),还要知道前几步的结果y(tn-2),y(tn-3),…;4)odel5s是基于数值微分公式(NDFs)的变阶求解器.它与后向微分公式BDFs(也叫Gear方法)有联系.但比它更有效.ode15s是一个多步求解器,如果认为一个问题是刚性的,或者在用ode45s时仿真失败或不够有效时,可以试试odel5s。
odel5s是基于一到五阶的NDF公式的求解器.尽管公式的阶数越高结果越精确,但稳定性会差一些.如果模型是刚性的,并且要求有比较好的稳定性,应将最大的阶数减小到2.选择odel5s求解器时,对话框中会显示这一参数.可以用ode23求解器代替。
del5s,ode23是定步长、低阶求解器.5)ode23s是基于一个2阶改进的Rosenbrock公式.因为它是一个单步求解器,所以对于宽误差容限,它比odel5s更有效.对于一些用odel5s不是很有效的刚性问题,可以用它解决.6)ode23t是使用“自由”内插式梯形规则来实现的.如果问题是适度刚性,而且需要没有数字阻尼的结果,可采用该求解器.7)ode23tb是使用TR—BDF2来实现的,即基于隐式Runge—Kutta公式,其第一级是梯形规则步长和第二级是二阶反向微分公式.两级计算使用相同的迭代矩阵.与ode23s相似,对于宽误差容限,它比odtl5s更有效.8)discrete(变步长)是simulink在检测到模型中没有连续状态时所选择的一种求解器.2.定步长(Flxed—Step)求解器可以选择的定步长求解器有:ode5,ode4,ode3,ode2,ode1和discrete.1)ode5是ode45的一个定步长版本,基于Dormand—Prince公式.2)ode4是RK4,基于四阶Runge—Kutta公式.3) ode3是ode23的定步长版本,基于Bogacki-Sbampine公式.4) ode2是Heun方法,也叫作改进Euler公式.5) odel是Euler方法.6) discrete(定步长)是不执行积分的定步长求解器.它适用于没有状态的模型,以及对过零点检测和误差控制不重要的模型.3.诊断页(Diagnostics)可以通过选择Simulation Parameters对话框的Diagnostics标签来指明在仿真期间遇到一些事件或者条件时希望执行的动作.对于每一事件类型,可以选择是否需要提示消息,是警告消息还是错误消息.警告消息不会终止仿真,而错误消息则会中止仿真的运行.(1)一致性检查一致性检查是一个调试工具.用它可以验证Simulink的0DE 求解器所做的某些假设.它的主要用途是确保s函数遵循Simulink内建模块所遵循的规则.因为一致性检查会导致性能的大幅度下阵(高达40%),所以一般应将它设为关的状态.使用一致性检查可以验证s函数,并有助于确定导致意外仿真结果的原因.为了执行高效的积分运算,Simulink保存一些时间步的结果,并提供给下一时间步使用.例如,某一时间步结束的导数通常可以放下一时间步开始时再使用.求解器利用这一点可以防止多余的导数运算.一致性检查的另一个目的是保证当模块被以一个给定的t(时间)值调用时.它产生一常量输出.这对于刚性求解器(ode23s和odel5s)非常重要,因为当计算Jacobi行列式时.模块的输出函数可能会被以相同的t值调用多次.如果选择了一致性检查,Simulink置新计算某些值,并将它们与保存在内存中的值进行比较,如果这些值有不相同的,将会产生一致性错误.Simulink比较下列量的计算值: 1)输出; 2)过零点 3)导数; 4)状态.(2)关闭过零点检测可以关闭一个仿真的过零点检测.对于一个有过零点的模型,关闭过零点检测会加快仿真的速度,但是可能影响仿真结果的精度.这一选项关闭那些本来就有过零点检测的模块的过零点检测.它不能关闭Hir crossing 模块的过零点检测.(3)关闭优化I/O存储选择该选项,将导致Simulink为每个模块约I/()值分配单独的缓存,而不是重新利用援存.这样可以充分增加大模型仿真所需内存的数量.只有需要调试模型时才选择该选项.在下列情况下,应当关闭缓存再利用; 1)调试一个C-MEX S-函数; 2)使用浮点scope或display模块来察看调试模型中的信号.如果缓存再利用打开,并且试图使用浮点scope或display模块来显示缓存已被再利用的信号,将会打开一个错误对话框.(4)放松逻辑类型检验选择该选项,可使要求逻辑类型输入的模块接受双精度类型输入.这样可保证与Simulink 3版本之前的模型的兼容性.4.提高仿真性能和精度仿值性能相精度由多种因素决定,包括模型的设计和仿真参数的选择.求解器使用它们的缺省参数值可以使大多数模型的仿真比较精确有效,然而,对于一些模型如果调整求解器相仿真参数将会产生更好的结果.而且,如果对模型的性能比较熟悉,并且将这些信息提供给求解器,得到的仿真效果将会提高。
(1)加快仿真速度仿真速度慢的原因有多种.下面列举其中的一些:1)模型中包含有MATLAB的Fcn模块.当模型包含有MATLAB的Fcn模块时,在仿真的每一时间步都会调用MATLAB的解释器,这将大大地减慢仿真的速度.因此应尽可能地使用内建的Fcn模块或者E1ementary Math模块.2)模型中包含有M文件形式的S函数.M文件形式的S函数也将导致在每一时间步调用MATLAB的解释器.可以考虑将s函数转换为子系统或者c-MEx文件形式的s函数.3)模型中包含有Memory模块.使用Memory模块使得变阶求解器(odel5s和odell3)在每一时间步将阶数设为1阶.4)最大的步长太小.如果改变了最大步长.可以试试重新使用缺省值(auto)运行仿真。
5)对精度要求太高.缺省的相对容差(0.1%)通常已经足够了.对于状态值趋于0的模型.如果绝对容差设得太小.仿真时状态值在零点附近会花去太多的时间步.6)时间尺度可能太长.减小时间间隔;7)问题可能是刚性的.而使用的是非刚性求解器.这时可用odel5s试一下;8)模型使用的采样时间相互之间不成倍数关系.相互之间不成倍数的混合采样时间会导致求解器采用足够小的步长,以保证采样时间符合所有的采样时间要求.9)模型包含有代数循环.在每一时间步都会反复计算代数循环,因此这会大大地降低仿真的性能.10)模型中将Random Number模块的输出传给了Intergrator模块.对于连续系统,在Sources库中使用Bond—limited Noise模块.(2)改进仿真精度要检查仿真的精度.仿真运行一段时间以后,减小相对容差到1e-4或者减小绝对容差,并重新运行它.比较两次仿真的结果.如果它们之间没有很大的差别,可以确信结果收敛.如果经过一段时间后,仿真结果变得不稳定,可能是如下原因:1)系统可能不稳定.2)如果使用的是odel5s,可能需要将最大的阶数限制在2阶(求解器稳定的最大阶数),或者试试用ode23s求解器.如果仿真结果看起来不是很精确,可能是:1)对于一个拥有趋于零的状态值的模型,如果绝对容差设得太大,仿真在零状态值附近花的步数太少.减小绝对容差的大小或者在Integrator对话框中为每—个状态分别调整绝对容差的设定.2)如果减小绝对容差不能有效地提高精度,减少相对容差的大小,减小步长,增加步数.5.处理复数信号在缺省状态下,simulink信号值是实数.尽管如此,模型可以产生相处理具有复数值的信号.可以采取以下任何一种方法在模型中引入复数值信号.1)由顶层瑞口从MATLAB工作空间向模型中装入复数值信号数据.2)在模型中产生一个常数模块,并设置其值为复数.3)产生实数信号分别对应于复数信号的实部和虚部.然后用实-虚复数转换(Real-Imag to Complex Conversion)模块将各部连成复数信号.可以用接受复数的模块来处理复数信号,大多数simulink模块接受复数信导作为输入。
一、设置仿真参数和选择解法器设置仿真参数和选择解法器,选择Simulation菜单下的Parameters命令,就会弹出一个仿真参数对话框,它主要用三个页面来管理仿真的参数。
Solver页,它允许用户设置仿真的开始和结束时间,选择解法器,说明解法器参数及选择一些输出选项。
Workspace I/O页,作用是管理模型从MATLAB工作空间的输入和对它的输出。
Diagnostics页,允许用户选择Simulink在仿真中显示的警告信息的等级。
1、Solver页此页可以进行的设置有:选择仿真开始和结束的时间;选择解法器,并设定它的参数;选择输出项。
仿真时间:注意这里的时间概念与真实的时间并不一样,只是计算机仿真中对时间的一种表示,比如10秒的仿真时间,如果采样步长定为0.1,则需要执行100步,若把步长减小,则采样点数增加,那么实际的执行时间就会增加。
一般仿真开始时间设为0,而结束时间视不同的因素而选择。
总的说来,执行一次仿真要耗费的时间依赖于很多因素,包括模型的复杂程度、解法器及其步长的选择、计算机时钟的速度等等。
仿真步长模式:用户在Type后面的第一个下拉选项框中指定仿真的步长选取方式,可供选择的有Variable-step(变步长)和Fixed-step(固定步长)方式。
变步长模式可以在仿真的过程中改变步长,提供误差控制和过零检测。
固定步长模式在仿真过程中提供固定的步长,不提供误差控制和过零检测。
用户还可以在第二个下拉选项框中选择对应模式下仿真所采用的算法。
变步长模式解法器有:ode45,ode23,ode113,ode15s,ode23s,ode23t,ode23tb 和discrete。