第八章作业
第八章小组作业

第八章小组作业
小组讨论作业
1、一家德国日用品公司准备进军中国的洗涤市场,可是它不了解中国人的洗涤习惯及所能承受的产品价格,所以该公司想开展一次调研活动来获得所需要的信息。
您认为应该采取哪种调查方式较好?
2、楚汉大酒店座落在南方某个省会城市的繁华地段,是一家投资几千万元的新建大酒店,开业初期生意很不景气。
公司经理为了寻找症结所在,想进行一次营销调研,您认为应该采取哪种调查方式较好?
3、澳大利亚某出版公司曾计划向亚洲推出一本畅销书,但是不能确定用哪一种语言、在哪一个国家推出。
出版公司采取哪种调查方式较好?。
(完整word版)第8章 红外光谱法作业(新书)

第8章 红外作业1. 已知O-H 键的力常数是7.7N/cm ,O-H 键折合质量μ为0.941,试计算O —H 的伸缩振动频率(以cm -1) 解:1-24510cm371210673.1941.0107.710314.32121=⨯⨯⨯⨯⨯⨯==-μπνkc2. 已知C=O 键的伸缩振动频率为1720cm -1,其μ为6.85,试求C=O 键的力常数k 。
解:μ=6.85×1.673×10-24=1.146×10-23N/cm12.03 dyn/cm 10203.110146.1)1720103(3.144μ)νc 4(k μk c 21ν6232102=⨯=⨯⨯⨯⨯⨯⨯===-ππ3. 指出下列各种振动形式那些是红外活性振动?哪些是非红外活性振动?解:乙烷中C-C 为非红外活性振动。
1,1,1-三氯乙烷中 C-C 为红外活性振动。
SO 2中S=O ,为红外活性振动。
4. 如何用红外光谱区别下列化合物 (1)CH 3COOH和COOCH 3(2)CH 3CH 2C CH 3O和 CH 3CH 2CH 2CHO(3)OH 和O(4)C 2H 5C C CH 3HH和C 2H 5C CHHCH 3解(1)根据3300~2500cm -1是否出现O-H 伸缩振动吸收峰(宽峰)区分酸和酯。
(2)根据2720cm -1是否出现醛基的C-H 费米共振吸收峰区分出醛来。
(3)根据1650-1850cm -1是否出现C=O 吸收峰判断出酮来。
(4)顺式烯烃C-H 弯曲振动在675-725cm -1,反式烯烃C-H 弯曲振动在1000~950cm -1.5.把下列化合物按νC=O 波数增加的顺序进行排列,并说明理由。
解:(1)C H 3C OCH 3C H 3C O OH C H 3C O Cl C H 3C O F <<<(2)C H 3C O CH 3C H 3C O HC H 3C OOC 2H 5C H 3C O Cl <<<C H 3C ONH 2<6.下列基团的νC-H 出现在什么位置?(1)-CH3 (2)-CH=CH2 (3)-C ≡CH (4)C O H解:甲基:2800-3000 cm -1 乙烯基3000~3100 cm -1 乙炔基3200~3300 cm -1 醛基 2720 (2750-2850) cm -17.试从下列红外数据判断其二甲苯的取代位置。
机械原理作业参考答案-第8章-孙桓-第8版-A-ok
(2)取杆1为机架,得双曲柄机构,C和D为摆转副。 (3)取杆3为机架,得双摇杆机构,A和B仍为周转副。
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
8-10
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
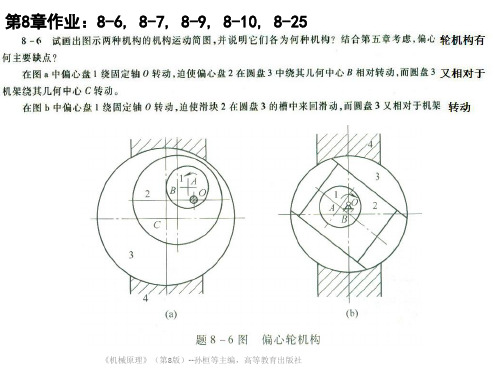
第8章作业:8-6, 8-7, 8-9, 8-10, 8-25
8-6
《机械原理》(第8版)--孙桓等主编,高等教育出版社
A
21
B
O
Байду номын сангаас
3
C
4
1 2
4 3
解题过程:机构运动简图如上图所示。其中(a)为双摇杆机构; (b)为导杆机构。 偏心轮的主要缺点:1)转动副接触面较大,摩擦损耗较大,效率较低; 2)易于出现自锁现象。
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
即当440 mm d 760 mm,机构为曲柄摇杆机构。
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
《机械原理》(第8版)--孙桓等主编,高等教育出版社
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
机架长度lAD 309 mm。
《机械原理》(第8版)--孙桓等主编, 高等教育出版社
第8章_作业
第八章一、单项选择题1、某投资方案年营业收入为10000元,年付现成本为6000元,年折旧额为2000元,所得税率50%,该方案的NCF=()。
A、2000B、1000C、3000D、5002、下列不属于终结现金流量范畴的是()。
A.固定资产残值收入 B. 固定资产投资C.垫支流动资金的收回 D.停止使用的土地的变价收入3、某投资方案欲购进一套新设备,要支付2000万,旧设备残值50万,在投入运营前要垫支营运资金200万,则该项目初始现金流量是()。
A、2150万B、1950万C、2000万D、2200万4、某项投资方案在经济上认为是有利的,其净现值至少应该( )。
A、等于1B、大于零C、等于零D、小于零5、下列指标的计算中,没有直接利用净现金流量的是()。
A、内部收益率B、投资利润率C、净现值率D、获利指数6.根据计算结果是否大于1来判断固定资产投资方案是否可行的指标是( )A平均报酬率 B、净现值 C、获利指数 D、投资回收期7、对投资项目内部收益率的大小不产生影响的因素是()。
A、原始投资额B、现金流量C、折现率D、项目寿命期8、某投资方案的年销售收入为180万元,年付现成本费用120万元,年折旧20万元,所得税率30%,则该方案的年现金流量为()万元。
A、60B、62C、56D、489.当一项长期投资的NPV大于零时,下列说法不正确的是()A.该方案不可投资B.该方案的内部报酬率大于其资本成本C.该方案获利指数大于1D.该方案未来报酬的总现值大于初始投资现值10、在没有资本限量的投资决策中,最好的评价方法是()A.净现值法B.获利指数法C.内含报酬率法D.投资回收期法11、固定资产使用成本是一种()A.非付现成本B.付现成本C. 沉没成本D.资金成本12、获利指数与净现值比,其优点是()A.便于投资额相同的方案的比较B.便于投资额不同的方案的比较C.考虑了投资风险性D.考虑了资产的时间价值13 计算营业现金流量时,每年净现金流量可按下列公式的()来计算。
结构力学 第八章 作业参考答案
D
Z2
B
2I 2FL/9 I
M图
D
L
B
A
L
B
2FL/9
A
L
FL/9
B
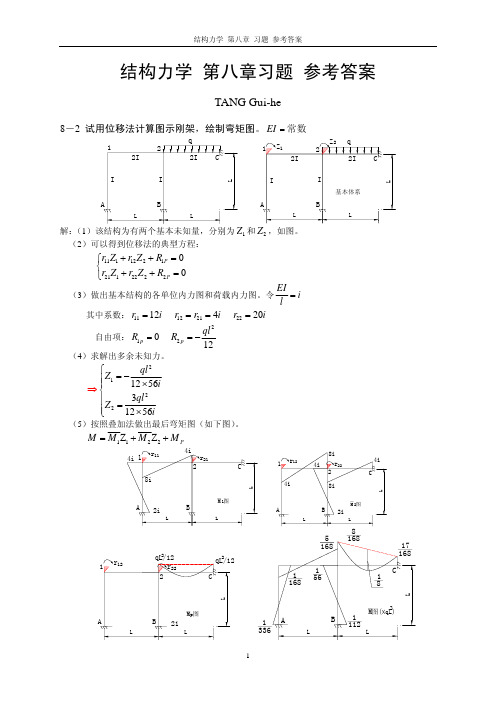
解: (1)该结构为有两个基本未知量,分别为 Z1 和 Z 2 ,如图。 (2)可以得到位移法的典型方程:
⎧r11Z1 + r12 Z 2 + R1P = 0 ⎨ ⎩r21Z1 + r22 Z 2 + R2 P = 0
(3)做出基本结构的各单位内力图和荷载内力图。令 其中系数: r11 = 14i 自由项: R1 p = 0 (4)求解出多余未知力。
4
1m
E
E
E r12 2I
4m
I
I
4m
I
I
1m
0.75 E
1m
结构力学 第八章 习题 参考答案
(2)可以得到位移法的典型方程:
⎧r11Z1 + r12 Z 2 + R1P = 0 ⎨ ⎩r21Z1 + r22 Z 2 + R2 P = 0
(3)做出基本结构的各单位内力图和荷载内力图。 其中系数: r11 = r22 =
8-7 试用位移法计算连续梁,绘制弯矩图。 EI = 常数
A Z1 B 6m 6m
基本体系
Z1 C 6m
A B 6m 6m C 6m
D
D
解: (1)该结构为有两个基本未知量,分别为 Z1 和 Z 2 ,如图。 (2)可以得到位移法的典型方程:
⎧r11Z1 + r12 Z 2 + R1P = 0 ⎨ ⎩r21Z1 + r22 Z 2 + R2 P = 0
《数学物理方法》第八章作业(边界条件)

第八章习题和部分定解问题。
P201:1,2,5,6,11,12,13,16,17,201.长为l 的弦,两端固定,弦中张力为T ,在距一端为0x 的一点以力0F 把弦拉开,然后突然撇除这力,求解弦的振动。
解:此题的定解问题为200000000,(0),(0,)(,)0,,(0),(,0)(),(),0.tt xx t t u a u x l u t u l t F l x x x x T l u x F x l x x x l T l u =⎧-=<<⎪==⎪⎪-⎧⎪<<⎪⎪⎨=⎨⎪⎪⎪-<<⎪⎩⎪⎪=⎩ )4()3()2()1( 2.求解细杆热传导问题,杆长l ,两端保持为零度,初始温度分布20/)(l x l bx u t -==。
此题的定解问题为220200,()(0),0,()/.t xx x x l t k u a u a x l C u u u bx l x l ρ===⎧-==≤≤⎪⎪⎪==⎨⎪⎪=-⎪⎩5.长为l 的杆,一端固定,另一端受力0F 而伸长,求解杆在放手后的振动。
此题的定解问题为20000000,(0),0,0,(,0),(0),0.tt xx x x x l X X t t u a u x l u u F F X u u x dx dx x l x YS YS u ===⎧-=≤≤⎪==⎪⎪∂⎨===≤≤⎪∂⎪=⎪⎩⎰⎰ 6.长为l 的理想传输线,远端开路,先把传输线充电到电位差0u ,然后把近端短路。
求解线上的电压),(t x u 。
此问题的泛定方程为)0(,1,022l x LCa u a u xx tt <<==-, 边界条件为(0,)0,(,)0.x x l u t u l t R L j t ==⎧⎪∂⎨⎛⎫=-+= ⎪⎪∂⎝⎭⎩,初始条件为00(,0),1(,0)0.t x t u x u u x j C ==⎧⎪⎨=-=⎪⎩11.在矩形区域b y a x <<<<0,0上求解拉氏方程0=∆u ,使满足边界条件 00(),0,sin ,0.x x a y y b u Ay b y u x u B u a π====⎧=-=⎪⎨==⎪⎩。
工程热力学第八章湿空气作业

第8章 湿 空 气例1:如果室外空气的参数为p=1.0133bar ,t=30℃,φ=0.90,现欲经空气调节设备供给2t =20℃,2φ=0.60的湿空气,试用h-d 图分析该空气调节过程,并计算析出的水分及各过程中的热量。
解:利用h-d 图分析计算该题所给条件下的空调过程,如图8.1,根据所给条件t=30℃,φ=0.90,在h-d 图上确定初态1,并查得1h =62.2kJ/k(a),1d =15.7g/kg(a)同样,由2t =20℃,2φ=0.60在图上确定终态2,并查得2h =34.1kJ/k(a),2d =15.7g/kg(a),由定2d 线与φ=1线的交点4, 查得4h =26.4kJ/kg(a), 2d =4d空调过程的分析:定湿冷却过程:湿空气的冷却过程,因其组成成分不变,即含湿量不变,但相对湿度增加,温度下降,直降到露点。
所以,是定湿降温过程。
例如,在h-d 图上自初态1沿1d =15.7g/kg(a)的定湿线进行到与φ=1线的交点3。
此时已成饱和空气,再继续冷却,过程自状态3沿饱和线(临界线)进行,直至与终态含湿量相等的状态4,在这个冷却去湿阶段中,将有水蒸气凝结成水析出,并放出热量。
1-4过程的放热量,可用焓差表示,即q=14h h -=26.4-62.2=-35.8kJ/kg(a)式中负号表示冷却时湿空气放出热量。
冷却去湿过程:每公斤干空气所析出的水分等于湿空气含湿量的减少量,即14d d d -=∆=7.1-15.7=-8.6g/kg(a)式中负号表示湿空气析出水分。
加热过程:为了达到工程所要求的湿度,常采用降温去湿,但往往使温度过低(如4点C t 08.8=,为了保证空调后的气体温度(本题要求20℃),去湿后,常常需要加热升温。
如在图8.1中就是自状态4沿定4d 线进行到终点2,温度升高,含湿量不变,相对湿度下降,这是定湿加热过程。
加热过程的吸热量也可以用焓差表示,即42h h q -==34.1-26.4=7.7kJ/kg(a)图8.1例2:已知干湿球湿度计的读数为:干球温度t 1=28℃,湿球温度t 2=19解ϕ=44%例3空气t 1=34t 3=20℃,ϕ3m A =50kg/min 试计算:(1(2(3解:按给定参数和过程在h —d 图上查出状态点1、2、3的有关参数,根据t 1、ϕ1查得d 1=0.0274kg/(kg 干空气)h 1=105kJ/(kg 干空气)根据t 3、ϕ3查得d 3=0.0073kg/(kg 干空气)h 3=38kJ/(kg 干空气)冷却去湿过程达到的状态为d 2=d 3=0.0073kg/(kg 干空气)的饱和空气状态,照此查得h 2=105kg/(kg 干空气)t 2=9℃(1)空气中需要除去的水分为min kg/005.1)0073.00274.0(50)(21=-⨯=-=d d mm a w(2)冷却介质带走的热量为w w a h m h h mQ --=)(2112 其中凝结水的焓为kJ/kg 64.379186.42=⨯==t C h pw w故有 min /kJ 2.38667.37005.1)27105(5012=⨯--⨯=Q(3)加热器加入的热量为假定空气处理室所用的喷雾水的水温为t w =12℃。
会计学原理第8章作业及其答案

一、判断题⒈库存现金日记账和银行存款日记账,必须采用订本式账簿。
()⒉库存现金日记账和银行存款日记账是序时账簿;反之,序时帐簿就是库存现金日记账和银行存款日记账。
()⒊帐簿按用途分类,可分为日记账、分类账和备查账。
()⒋库存商品明细账应采用三栏式账簿,以反映其收入、发出和结存金额。
()⒌每天纪录的账簿称之为日记账。
()⒍结账就是把一定时期内发生的经济业务在全部登记入账的基础上,结出每个账户期末余额的工作。
()⒎在新的会计年度开始时,必须更换全部帐簿,不能只更换总账、库存现金日记账和银行存款日记账。
()⒏登记账簿要用蓝黑墨水钢笔或蓝黑圆珠笔书写,不得使用铅笔书写。
()⒐各种明细账的登记依据,既可以是原始凭证,汇总原始凭证,也可以是记账凭证。
()⒑总分类账户及其所属明细分类账户的账项必须在同一会计期间内登记。
()二、单项选择题⒈不属于设置账簿原则的有()。
A.保证全面系统反映经济活动情况B.在满足实际需要的前提下,尽量节约人力和物力C.格式的设计要力求简明实用D.尽量减少账簿的种类和数量⒉总分类账簿应采用()。
A.活页账簿B.卡片账簿C.订本账簿D.备查账簿⒊原材料明细账的外表形式一般采用()。
A.订本式B.活页式C.三栏式D.多栏式⒋下列会计科目,采用三栏式明细账格式的是()。
A.生产成本B.营业费用C.原材料D.应收账款⒌新的会计年度开始,可以继续使用,不必更换新账的是()。
A.总分类账B.银行存款日记账C.固定资产卡片D.管理费用明细账⒍会计人员在结账前发现,在根据记账凭证登记入账时,误将600元写成6000元,而记账凭证无误,应采用()进行更正。
A.补充登记法B.划线更正法C.红字更正法D.平行登记法⒎记账以后,发现记账凭证中的应借应贷会计科目有错误,应采用()进行更正。
A.划线更正法B.红字更正法C.横线登记法D.补充登记法⒏发现记账凭证中的会计科目和应借应贷方向未错,但所记金额大于应记金额,并据以登记入账,应采用()进行更正。
第八章_时间数列作业
一填空题1 时间数列的两个构成要素是___和___4 平均指标数列由一系列_____组成,它反映现象的__________的变动的情况。
7 发展速度是报告期水平与____之比。
9 增长1%的绝对值是___除以100的绝对值。
11 平均发展速度是___的序时平均数。
二是非题1 通过时间数列前后个时间上指标值的对比,它可以反映现象的发展变化过程及其规律。
()3 时点数列中,各个时点的指标值可以相加。
()5 相邻两项的累积长量之差等于相应的逐期增长值。
()7 相对数时间数列求序时平均数时,根据所给数列简单平均即可。
()9 两个相邻的定基发展速度相除可得最初水平。
()三单项选择2 时间数列中,每个指标数值可以相加的是()A相对数时间数列B时期数列C平均数时间数列D时间数列3时间数列中的每一个指标数值是()A定期的统计一次B连续不断统计而得C每隔一定时间统计一次D每隔一个月统计一次4在时点数列中()A各指标数值之间的距离称做“间隔”B各指标数值所属的时期长短称做“间隔”C最初水平与最末水平之差称做“间隔D最初水平与最末水平之间的距离称做“间隔”6时期数列中增长速度计算公式是()A增长速度≡增长量÷报告期水平B增长速度≡增长量÷期初水平C增长速度≡增长量÷期末水平D增长速度≡增长量÷基期水平7、已知各期环比增长速度为7.1%、3.4%、3.6%、5.3%,则定期增长速度是()。
A、7.1%×3.4%×3.6%×5.3%B、(7.1%×3.4%×3.6%×5.3%)—1C、107.1%×103.4%×103.6%×105.3%D、(107.1%×103.4%×103.6%×105.3%)—18、发展速度与增长速度相比较()。
A、定基增长速度等于环比增长速度连乘积B、定基发展速度等于各环比增长速度连乘积C、发展速度不包括基期水平D、增长速度不包括基期水平10、应用几何平均法计算平均发展速度主要是因为()。
第八章_恒定电流的磁场作业及解答
结束
目录
(1) 解:
200×100×10-3 H0 = N I = =200(A /m ) -2 l 10×10
B0 = m0H0 = 4p×10-7×200=2.5×10-4(T )
(2) H = H0 =200(A /m ) H0 =mrB 0= 4200×2.5×10-4 B = m0 m r
0
结束
目录
8-26 在半径为R的无限长金属圆柱体内挖 去一半径为 r 无限长圆柱体,两圆柱体的轴线平 行,相距为 d,如图所示。今有电流沿空心柱体的 的轴线方向流动,电流 I 均匀分布在空心柱体的 横截面上。 (1)分别求圆柱轴线上和 空心部分轴线上的磁感应 强度的大小; (2)当R =1.0cm, r =0.5 mm,d =5.0mm,和I =31A, 计算上述两处磁感应强度的 值。 d
大柱体的电流在O点的磁感应强度为零, 所以O点的磁场等于小柱体反向电流在O点 所产生的磁场。 设O点的磁感应强度为B0 结束
目录
δ =π ( R 2 r 2 )
设小圆柱体中的电流为 I ´
I
× × × × ×
× × ×
× ×
d
× ×
× ×
πr I I ´ =δ π r = (R 2 r 2 ) π
0 0 0
目录
8-28 一个电子射入B =(0.2 i+0.5 j 的非均匀磁场中,当电子速度为v =5×106j m/s时,求电子所受的磁力。
结束
目录
已知: v =5×106 j m/s
求:F 解:
B =(0.2 i +0.5 j )T q = 1.6×10-19 C
F = q v ×B
= q (0.2 i +0.5 j )×( 5×106 j )
工科第八章作业(新).
p nkT
n P 2.451026 m3 kT
单位长度(m)上的分子数为
1
n3 6.26108 m1
分子间的的平均距离为
d
1 n1/3
1.6109 m
d是氧分子直径的5.33倍
8.5 一 体 积 为 1.0×10-3m3 的 容 器 中 , 含 有 4.0×10-5kg 的 氦 气 和 4.0×10-5kg的氢气,它们的温度为30℃,求容器中混合气体的压强。
氦气分压强为: P1
m1 RT M1V
dN K Ndv N
(0 v V , K为常量)
0
(v≥V)
求:(1)用N和V定出常量K;
(2)用V表示出平均速率和方均根速率。
v f (v)dv
vK
K
dv V 1
所以K N
0
0N
N
V
v V vf (v)dv K 1 v2 1 v
0
N2 2
v 2 vF v 2 f (v)dv 1 v 2
由E m 3 RT则有T E 1.28107 K
M2
m 3R
M2
8.8 求一定量氢气在压强为2.026Pa、体积为6×10-2m3时的内能。
由PV RT
E i RT i PV 5 2.026 6102
2
2
2
8.9 容器内贮有2mol的某种气体,今从外界输入4.18×102J的热量, 测得其温度升高10K,求该气体分子的自由度。
8第八章习题及答案修改
第八章作业及答案一、单项选择题1 、在中国共产党领导下,中国人民推翻了三座大山,于 1949 年成立了中华人民共和国,这标志着()A. 社会主义制度的基本建立B. 美国遏制中国政策的失败C. 新民主主义革命的胜利D. 社会主义三大改造的开始2 、 20 世纪中国经历了三次历史性巨变,其中第二次是指()A. 辛亥革命的胜利和中华民国的成立B. 新民主主义革命的胜利和人民民主专政制度的建立C. 中华人民共和国的成立和社会主义制度的建立D. 社会主义改造的完成和全面建设社会主义的开始3 、全国土地改革以后分配给农民的土地()A. 归农民所有B. 归乡镇所有C. 归集体所有D. 归国家所有4 、新中国成立之初的“过渡时期”是指()A. 从建国到三大运动胜利B. 从建国到国民经济恢复C. 从建国到三大改造完成D. 从大陆统一到三大改造完成5 、 1953 年中国共产党提出“一化三改”的过渡时期总路线,其中“一化”是指()A. 国家的社会主义工业化B. 社会主义现代化C. 农业合作化D. 科学技术现代化6 、建国以后,人民政府没收官僚资本,这一措施()A. 兼有旧民主主义和新民主主义性质B. 属于新民主主义性质C. 兼有新民主主义革命和社会主义革命性质D. 属于社会主义革命性质7 、 1956 年底,三大改造的实现标志着()A. 过渡时期总任务提前完成B. 已由农业国转变为工业国C. 开始进入社会主义初级阶段D. 国内主要矛盾发生变化8 、作为 1953 年开始的发展国民经济的一五计划建设的中心环节是()A. 重工业B. 轻工业C. 农业D. 林业9 、第一个五年计划中,重工业项目集中建设在()A. 华北地区B. 西北地区C. 东北地区D. 东南地区10 、我国第一座生产载重汽车的制造厂位于()A. 沈阳B. 武汉C. 长春D. 北京11、毛泽东提出的关于手工业社会主义改造的方针是()A、自愿互利、典型示范、国家帮助B、积极领导,稳步发展C、说服教育、典型示范、国家援助D、积极领导,稳步前进12、资本主义工商业社会主义改造中的高级形式的国家资本主义是()A、计划订货B、统购包销C、委托加工D、公私全营1 3、新民主主义经济中有决定意义的因素是()A、国营经济B、个体经济C、合作社会经济D、国家资本主义经济14、新中国建立初期,社会主义国营经济的主要来源是()A、解放区的公营经济B、没收的官僚资本C、征收、代管的外国资本D、国家资本主义经济15、中国由新民主主义向社会主义转变的优越的政治条件是()A、马克思主义、毛泽东思想的指导地位B、中国共产党的领导和人民民主专政国家制度的建立C、新民主主义经济制度的建立和国民经济的恢复D、社会主义国营经济成为多种经济成份中的领导力量16、党在过渡时期的总路线的主体是()A、对农业的社会主义改造B、对手工业的社会主义改造C、对资本主义工商业的社会主义改造D、实现国家的社会主义工业化17、新中国发展国民经济的第一个五年计划期间是指()A、1952-1956年B、1949-1954年C、1953-1957年D、1950-1955年18、从1953年开始的第一个五年计划的中心环节是()A、优先发展重工业B、进行社会主义改造C、优先发展农业D、恢复国民经济19、毛泽东提出的关于农业社会主义改造的方针是()A、自愿互利、典型示范、国家帮助B、积极领导,稳步发展C、先合作化,后机械化D、积极领导,稳步前进20、毛泽东提出的关于农业社会主义改造的原则是()A、自愿互利、典型示范、国家帮助B、积极领导,稳步发展C、说服教育、典型示范、国家援助D、先合作化,后机械化答案:1 、 C2 、 C3 、 A4 、 C5 、 A6 、 C7 、 C8 、 A9 、 C 10 、 C11、D 12、D 13、A 14、B 15、B16、D 17、C 18、A 1 9、B 20、A二、多项选择题1 、下列关于新中国成立初期国内外形势的表述不正确的是()A. 取得了人民解放战争的伟大胜利B. 国内反封建斗争的任务已经完成C. 国民经济处于全面崩溃的状态D. 资本主义国家都不承认新中国E. 完成了祖国统一2 、全国胜利后,中国社会经济中存在着哪几种经济成分()A. 社会主义性质的国营经济B. 半社会主义性质的合作社经济C. 农民和手工业者的个体经济D. 私人资本主义经济E. 国家资本主义经济3 、下列关于 1952 年土地改革后确立的农民土地所有制的表述正确的是()A. 实质上是一种土地私有制B. 它彻底消灭了我国封建剥削土地制度C. 它极大地解放了农村生产力D. 为农业生产力发展和国家工业化开辟道路E. 它标志着中国半封建社会的结束4 、 1952 年,毛泽东指出“不应再把民族资产阶级成为中间阶级。
旧版教材 第八章作业(参考答案)
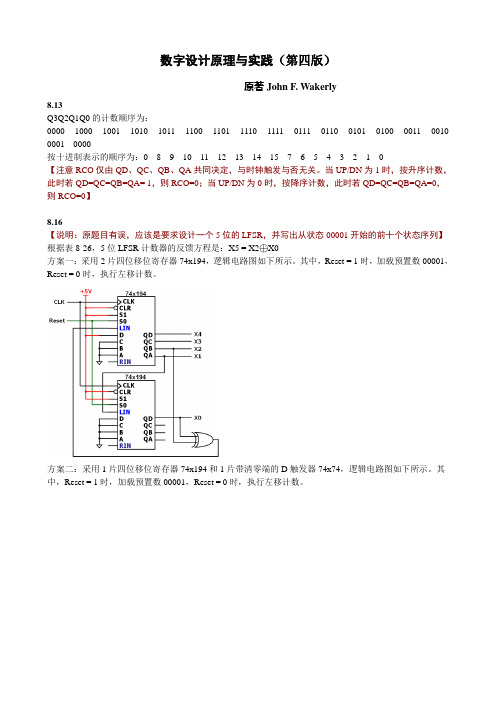
数字设计原理与实践(第四版)原著John F. Wakerly8.13Q3Q2Q1Q0的计数顺序为:0000 1000 1001 1010 1011 1100 1101 1110 1111 0111 0110 0101 0100 0011 0010 0001 0000按十进制表示的顺序为:0 8 9 10 11 12 13 14 15 7 6 5 4 3 2 1 0【注意RCO仅由QD、QC、QB、QA共同决定,与时钟触发与否无关。
当UP/DN为1时,按升序计数,此时若QD=QC=QB=QA= 1,则RCO=0;当UP/DN为0时,按降序计数,此时若QD=QC=QB=QA=0,则RCO=0】8.16【说明:原题目有误,应该是要求设计一个5位的LFSR,并写出从状态00001开始的前十个状态序列】根据表8-26,5位LFSR计数器的反馈方程是:X5 = X2⊕X0方案一:采用2片四位移位寄存器74x194,逻辑电路图如下所示。
其中,Reset = 1时,加载预置数00001,Reset = 0时,执行左移计数。
方案二:采用1片四位移位寄存器74x194和1片带清零端的D触发器74x74,逻辑电路图如下所示。
其中,Reset = 1时,加载预置数00001,Reset = 0时,执行左移计数。
计数器输出X0X1X2X3X4的状态共有25-1=31个。
从状态00001开始的前十个状态序列是:00001 00010 00100 01001 10010 00101 01011 10110 01100 11001【其余的21个状态是:10011 00111 01111 11111 11110 11100 11000 10001 00011 00110 01101 11011 10111 01110 11101 11010 10101 01010 10100 01000 10000】8.27【解题思路:教材图8-24已给出了采用T 触发器设计的4位升序行波计数器,其输出Q3Q2Q1Q0的计数顺序是0000 ~ 1111,十进制顺序为0 ~ 15。
第八章货币需求作业和答案

第八章货币需求一、填空题1、费雪方程式中,M是一个()变量。
答案:外生2、剑桥方程式是从()角度分析货币需求的。
答案:微观3、凯恩斯认为,投机性货币需求与()负相关。
答案:利率水平4、投机性货币需求的增减关键在于微观主体对()利率水平的估价。
答案:现存5、凯恩斯的后继者认为,交易性货币需求的增幅小于收入的增幅,因而具有()的特点。
答案:规模节约6、弗里德曼认为,人们的财富总额可以用()作为代表性指标。
答案:恒久收入7、弗里德曼的货币需求函数中,货币需求与人力财富的比重()相关。
答案:正8、从微观角度考察货币需求时,财富和收入属于()变量。
答案:规模9、从宏观角度分析,微观主体对货币需求的影响已被纳入()变量之中。
答案:货币流通速度10、凯恩斯对货币需求理论的突出贡献是关于货币需求()的分析。
答案:动机11、费雪方程式的缺陷在于没有考虑()对货币需求的影响。
答案:微观主体动机12、凯恩斯的“流动偏好”概念是指人们的()。
答案:货币需求行为13、名义货币需求与实际货币需求的区别在于是否剔除()的影响。
答案:物价二、单项选择题1、马克思关于流通中货币量理论的假设条件是()。
A、完全的金币流通B、完全的纸币流通C、金币流通为主D、纸币流通为主答案:A2、费雪在其方程式(MV=PT)中认为,最重要的关系是()。
A、M与V的关系B、M与T的关系C、M与P的关系D、T与V的关系答案:C3、剑桥方程式重视的是货币的()。
A、交易功能B、资产功能C、避险功能D、价格发现功能答案:B4、凯恩斯把用于贮存财富的资产划分为()。
A.货币与债券B.股票与债券C.现金与存款D.储蓄与投资答案:A5、凯恩斯提出的最有特色的货币需求动机是()。
A.交易动机B.预防动机C.投资动机D.投机动机答案:D6、弗里德曼认为货币需求函数具有()的特点。
A、不稳定B、不确定C、相对稳定D、相对不稳定答案:C7、下列哪个方程式是马克思的货币必要量公式:()A、MV=PTB、P=MV/TC、M=PQ/VD、M=KPY 答案:C8、下列变量中,属于典型的外生变量的是()。
第八章 热力学作业(答案)
第八章 热力学基础一、选择题[ A ]1.(基础训练4)一定量理想气体从体积V 1,膨胀到体积V 2分别经历的过程是:A →B 等压过程,A →C 等温过程;A →D 绝热过程,其中吸热量最多的过程(A)是A →B. (B)是A →C. (C)是A →D.(D)既是A →B 也是A →C , 两过程吸热一样多。
【提示】功即过程曲线下的面积,由图可知AD AC AB A A A >>; 根据热力学第一定律:E A Q ∆+= AD 绝热过程:0=Q ; AC 等温过程:AC A Q =;AB 等压过程:AB AB E A Q ∆+=,且0>∆AB E[ B ]2.(基础训练6)如图所示,一绝热密闭的容器,用隔板分成相等的两部分,左边盛有一定量的理想气体,压强为p 0,右边为真空.今将隔板抽去,气体自由膨胀,当气体达到平衡时,气体的压强是(A) p 0. (B) p 0 / 2. (C) 2γp 0. (D) p 0 / 2γ. 【提示】该过程是绝热自由膨胀:Q=0,A=0;根据热力学第一定律Q A E =+∆得 0E ∆=,∴0T T =;根据状态方程pV RT ν=得00p V pV =;已知02V V =,∴0/2p p =.[ D ]3.(基础训练10)一定量的气体作绝热自由膨胀,设其热力学能增量为E ∆,熵增量为S ∆,则应有 (A) 0......0=∆<∆S E (B) 0......0>∆<∆S E . (C) 0......0=∆=∆S E . (D) 0......0>∆=∆S E【提示】由上题分析知:0=∆E ;而绝热自由膨胀过程是孤立系统中的不可逆过程,故熵增加。
[ D ]4.(自测提高1)质量一定的理想气体,从相同状态出发,分别经历等温过程、等压过程和绝热过程,使其体积增加1倍.那么气体温度的改变(绝对值)在 (A) 绝热过程中最大,等压过程中最小. (B) 绝热过程中最大,等温过程中最小. (C) 等压过程中最大,绝热过程中最小.(D) 等压过程中最大,等温过程中最小. 【提示】如图。
电力系统暂态分析第八章作业参考答案

第八章作业参考答案1、分析同步发电机并列运行暂态稳定性时,为什么不考虑非周期电流和负序电流的影响? 答:分析同步发电机并列运行暂态稳定性时,不考虑非周期电流影响的原因有二,一是非周期分量衰减速度很快,存在时间很短;二是其电枢反应磁场作用在转子上的平均电磁转矩为零;不考虑负序电流的影响,原因是其电枢反应磁场作用在转子上的平均电磁转矩为零。
2、在)0()2()1(∑∑∑==X X X 的简单电力系统中,哪种短路对暂态稳定性的影响最大?那种最小?为什么?以下图所示简单电力系统为例进行说明。
答:根据并列运行暂态稳定性的条件可知,短路故障时,发电机输出的电磁功率越小,加速面积越大,对发电机并列运行暂态稳定性的影响越大。
短路对转子受扰运动的影响取决于正序电流,而正序电流是由正序增广等值网络确定的,以所给简单电力系统为例,短路时的正序增广网络如下图所示,短路时发电机的功角特性方程为:δsin II E X UE P '=其中:∆++++++=X X X X X X X X X X T L T G T L T G II )21)(()21()(2)1(1)1(2)1(1)1( 三相短路时:00)3(.=∞==∆m E II P X X 、、;两线短路接地时:)1.1()1.1(.)1.1()1()0()2(21//IIm E II II X U E P X X X X X X '====∑∑∑∆、、 两相短路时:)2()2(.)2()1()2(IIm E II II X UE P X X X X X '====∑∑∆、、 单相接地短路时:)1()1(.)1()1()0()2(2IIm E II II X UE P X X X X X X '===+=∑∑∑∆、、 由于 )1(.)2(.)1.1(.)3(.)1()2()1.1()3(m E m E m E m E II II II II P P P P X X X X <<<>>>、所以三相短路的影响最大,其他依次是两相短路接地、两相短路、单相接地短路。
计算机网络第八章作业

一、单项选择题(1)Web 浏览器向侦听标准端口的Web 服务器发出请求之后,在服务器响应的TCP 报头中,源端口号是多少(C)。
A、13B、53C、80D、1024(2)BBS的含义是(C)。
A、文件传输B、3W浏览C、电子公告牌D、电子邮件(3)通过哪种协议可以在网络中动态地获得IP地址(A)。
A、DHCPB、SNMPC、PPPD、UDP(4)有关网络域名系统的描述中,不正确的是(C)。
A、网络域名系统的缩写为DNSB、每个域名可以由几个域组成,域与域之间用“.”分开C、域名中的最左端的域称为顶级域D、CN是常用的顶级域名代码(5)DNS的作用是(C)。
A、为客户机分配IP地址B、访问HTTP的应用程序C、将域名翻译为IP地址D、将MAC地址翻译为IP地址(6)DNS工作于(D)。
A、网络层B、传输层C、会话层D、应用层(7)在Internet中,使用FTP功能可以传送(A)类型的文件。
A、文本文件B、图形文件C、视频文件D、任何类型的文件(8)某人想要在电子邮件中传送一个文件,他可以借助(D)。
A、FTPB、TELNETC、WWWD、电子邮件中的附件功能(9)FTP工作于(D)。
A、网络层B、传输层C、会话层D、应用层(10)FTP控制连接端口号(B)。
A、20B、21C、23D、25(11)系统对WWW 网页存储的默认格式是(C)。
A、PPTB、TXTC、HTMLD、DOC(12)在Internet中,某WWW服务器提供的网页地址为,其中的“http”指的是(B)。
A、WWW服务器主机名B、访问类型为超文本传输协议C、访问类型为文件传输协议D、WWW服务器域名二、简述题1、简述DNS工作原理答:服务器的IP地址向DNS服务器请求进行域名解析,缓存已经解析过的主机名与IP地址对应关系。
解析过程如下:①应用程序请求一个主机名解析②DNS先在本地缓存中查询,若查到,返回IP地址给应用,流程结束。
《理论力学》第8章作业
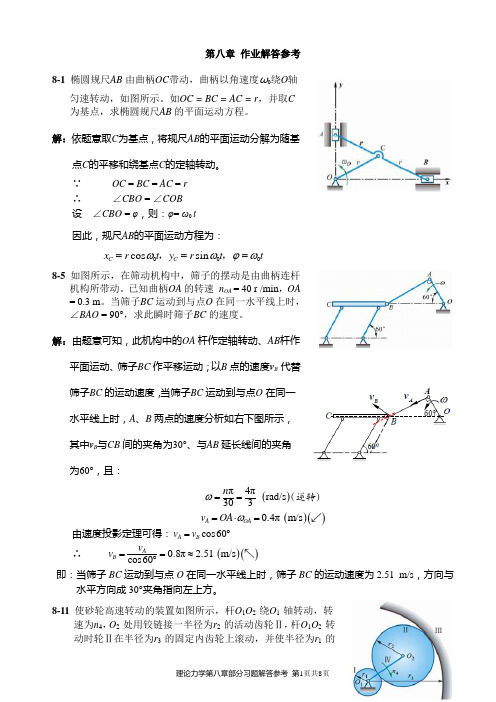
第八章 作业解答参考8-1 椭圆规尺AB 由曲柄OC 带动,曲柄以角速度ω0绕O 轴匀速转动,如图所示。
如OC = BC = AC = r ,并取C为基点,求椭圆规尺AB 的平面运动方程。
解:依题意取C 为基点,将规尺AB 的平面运动分解为随基点C 的平移和绕基点C 的定轴转动。
∵ OC = BC = AC = r∴ ∠CBO = ∠COB设 ∠CBO = φ,则:φ= ω0 t因此,规尺AB 的平面运动方程为:000cos sin C C x r t y r t t ωωϕω===,,8-5 如图所示,在筛动机构中,筛子的摆动是由曲柄连杆机构所带动。
已知曲柄OA 的转速 n OA = 40 r /min ,OA= 0.3 m 。
当筛子BC 运动到与点O 在同一水平线上时,∠BAO = 90°,求此瞬时筛子BC 的速度。
解:由题意可知,此机构中的OA 杆作定轴转动、AB 杆作平面运动、筛子BC 作平移运动;以B 点的速度v B 代替筛子BC 的运动速度,当筛子BC 运动到与点O 在同一水平线上时,A 、B 两点的速度分析如右下图所示,其中v B 与CB 间的夹角为30°、与AB 延长线间的夹角为60°,且:()π4πrad/s 303n ω== (逆转) ()()0.4π m/s A OA v OA ω=⋅= 由速度投影定理可得:cos60A B v v =︒∴ ()()0.8π 2.51 m/s cos60A B v v ==≈︒即:当筛子BC 运动到与点O 在同一水平线上时,筛子BC 的运动速度为2.51 m/s ,方向与水平方向成30°夹角指向左上方。
8-11 使砂轮高速转动的装置如图所示,杆O 1O 2 绕O 1 轴转动,转速为n 4,O 2 处用铰链接一半径为r 2 的活动齿轮Ⅱ,杆O 1O 2 转动时轮Ⅱ在半径为r 3 的固定内齿轮上滚动,并使半径为r 1 的轮Ⅰ绕O 1 轴转动。
2022年知到国家安全教育第八章作业答案

2022年知到国家安全教育第八章作业答案1、20.下列物质中不是可燃物的有()? 【单选题】[单选题] *A.氢气B.空气(正确答案)C.乙炔D.酒精2、30、下列关于公民在反间谍过程中的权利义务,说法错误的是()。
[单选题] *A.任何个人和组织都不得非法持有、使用间谍活动特殊需要的专用间谍器材;B.公民和组织发现间谍行为,应当及时向国家安全机关报告;C.在国家安全机关调查了解有关间谍行为的情况、收集有关证据时,有关组织和个人可以拒绝;(正确答案)D.任何公民和组织都应当保守所知悉的有关反间谍工作的国家秘密。
3、57.协议离婚应满足的条件(A,B,C)*A、申请离婚的当事人双方应是自愿离婚。
对于一方要求离婚,婚姻登记管理机关不予受理。
(正确答案)B、申请离婚的当事人双方应对子女抚养和财产问题已有适当处理。
对于双方要求离婚,但是对子女抚养、夫妻一方生活困难的经济帮助、财产及债务处理事项未达成协议的,婚姻登记管理机关不予受理。
C、其他不予协议离婚的情况是一方或者双方当事人为限制民事行为能力或无民事行为能力的,婚姻登记管理机关不予受理;未办理过结婚登记的,婚姻登记管理机关不予受理。
D、双方感情破列,并已分居满两年的夫妻双方在自愿的情况下同意协议离婚。
协议离婚必须夫妻双方对离婚的意思、财产分割、子女抚养等问题达成一致。
4、4.立法必须以()为依据。
[单选题] *A.党的政策B.客观事实C.宪法(正确答案)D.既定事实5、5、坚持总体国家安全观,以()为依托。
[单选题] *A、确保人民安全B、确保政治安全C、维护经济安全D、促进国际安全(正确答案)6、30、2015 年()撤侨行动是我国首次以军舰为主要运输工具、以军事力量为主要依托的维护国家海外利益的成功尝试。
[单选题] *A、尼泊尔B、也门(正确答案)c、利比亚D、埃及7、54、党的历史经验告诉我们,严格()是我们党增强自我净化、自我完善、自我革新,自我提高能力的重要途径。
第八章 原子吸收光谱分析法作业
第八章原子吸收光谱分析法一、简答题1.原子吸收光谱和原子荧光光谱是如何产生的?比较两种分析方法的特点。
2.解释下列名词:⑴谱线轮廓;⑵积分吸收;⑶峰值吸收;⑷锐线光源;⑸光谱通带。
3.表征谱线轮廓的物理量是哪些?引起谱线变宽的主要因素有哪些?4.原子吸收光谱法定量分析的基本关系式是什么?原子吸收的测量为什么要用锐线光源?5.原子吸收光谱法最常用的锐线光源是什么?其结构、工作原理及最主要的工作条件是什么?6.空心阴极灯的阴极内壁应衬上什么材料?其作用是什么?灯内充有的低压惰性气体的作用是什么?7.试比较火焰原子化系统及石墨炉原子化器的构造、工作流程及特点,并分析石墨炉原子化法的检测限比原子化法高的原因。
8.火焰原子化法的燃气、助燃气比例及火焰高度对被测元素有何影响?试举例说明。
9.原子吸收分光光度计的光源为什么要进行调制?有几种调制的方式?10.分析下列元素时,应选用何种类型的火焰?并说明其理由:⑴人发中的硒;⑵矿石中的锆;⑶油漆中的铅。
11.原子吸收光谱法中的非光谱干扰有哪些?如何消除这些干扰?12.原子吸收光谱法中的背景干扰是如何产生的?如何加以校正?13.说明用氘灯法校正背景干扰的原理,该法尚存在什么问题?14.在测定血清中钾时,先用水将试样稀释40倍,再加入钠盐至0.8mg/mL,试解释此操作的理由,并说明标准溶液应如何配制?15.产生原子荧光的跃迁有几种方式?试说明为什么原子荧光的检测限一般比原子吸收低?二、填空题1.原子吸收光谱分析法与发射光谱分析法,其共同点都是利用原子光谱,但二者在本质上有区别,前者利用的是现象,而后者利用的是现象。
2.根据玻耳兹曼分布定律,基态原子数远大于激发态原子数,所以发射光谱法比原子吸收法受的影响要大,这就是原子吸收法比发射光谱法较好的原因。
3.澳大利亚物理学家瓦尔什提出用吸收来代替吸收,从尔解决测量吸收的困难。
4.空心阴极灯发射的光谱,主要是的光谱,光强度随着的增大而增大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第八章作业
提示:
1.传动机构共有四级:a. 蜗杆(2)与蜗轮(4),其中"双头"是指蜗杆旋转一周,蜗轮转过两个齿。
转速比为1/齿数比(双头蜗杆相当于齿数为2的齿轮)。
b. 齿轮(3)与齿轮(6),转速比为1/齿数比。
c. 卷筒(5)与导轮(7) ,转速比为1/直径比。
d. 静导轮(7)与动导轮(8) ,因直径相等时,动导轮转速为静导轮转速的一半,故转速比为2×1/直径比。
2. 动导轮(8)即有转动又有直线运动,直线运动速度与吊钩(9)负载(10)相等。
解:(1) 折算到电动机轴上的总飞轮惯量为系统中各部分飞轮惯量折算值之和,包括转动部分和直线运动部分的飞轮惯量。
其中动导轮(编号8) 即有转动(其转速为静导轮(编号7)转速的一半) ,又有直线运动(v=12m/min ,即v=12/60=0.2m/sec),需分别计算其飞轮惯量。
系统中转动部分的飞轮惯量折算值2
A GD 为:
8-24
2
222228
12727127251262523124232
2
212N.m 76.6)2
/115.015.01565230(92
.3)5.015.01565230(92.3)1565230(2941.98)230(05.1794.298.059.5 )()()()(≈⨯⨯⨯+⨯⨯+⨯++++
+=+
++++++=
n n GD n n GD n n GD GD n n GD GD GD GD GD A
系统中直线运动部分的飞轮惯量折算值2
B GD 为:
设动导轮(编号8)为实心圆柱体,其旋转中心即圆柱体轴线,则可近似认为其惯性半径ρ (或
惯性直径D) 与其半径r(或直径d) 的关系为:28282ρ=r 或28
282D d =。
又设G 8为动导轮(编号8) 的重量。
则 N 34815.092
.3222
/2
28
2
8
282828
2
88≈⨯=
⨯=
=
=d GD d GD D GD G 电动机的转速为:
r/min ...d v n n n n n n n n n n n n n n 994150122501501565230602775533177553311≈⨯⨯⨯⨯=⨯⨯⨯⨯⨯=⨯⨯⨯=
π
π 则 2
22
22
110
982
N.m
302.0)6012(99419620490348365365
≈⨯++⨯
=⨯++=v n G G G GD B 折算到电动机轴上的系统总飞轮惯量为:
22
22N.m 062.7302.076.6=+=+=B A GD GD GD
(2)重物吊起及下放时折算到电动机轴上的阻转矩(考虑传动机构的损耗,用简化方法,设吊起及下放时传动机构的损耗不变。
) 1)重物吊起时
N.m 56.260
12
7.09941962049034855.955
.911098=⨯⨯++⨯=⨯++=v n G G G T C z η
2)重物下放时 N.m
45.22)7
.01
2(60129941962049034855.9)12(55
.911098≈-⨯⨯++⨯=-⨯⨯++='C z v n G G G T η (3)空钩吊起及下放时折算到电动机轴上的阻转矩(考虑传动机构的损耗,用简化方法,设吊起及下放时传动机构的损耗不变。
) 1)空钩吊起时
N.m 1.6160
12
1.0994********.955
.901980=⨯⨯+⨯=⨯+=v n G G T z η 2)空钩下放时 N.m
88.12)1
.01
2(601299449034855.9)12(55
.901980-≈-⨯⨯+⨯=-⨯⨯+='ηv n G G T z (4) 在(2)的情况下,重物吊起时电动机输出机械能(负载位能增加);重物下放时,电动机输入机械能(负载位能减小,一部分克服传动机构的损耗,一部分输入电动机)。
在(3)的情况下,空钩吊起时电动机输出机械能(空钩位能增加);空钩下放时,电动机输出机械能克服传动机构的损耗(空钩位能减小但不足以克服传动机构的损耗。
在计算公式中,已定义为
负载电动机传送功率,该功率的计算结果10Ω'Z
T 为负值,实为电动机向负载输出机械能)。