自动控制原理概述及开闭环实例分析
自动控制原理课件三、开环控制系统与闭环控制系统

即:
% x max x c () 100 % xc ()
的相
它反映系统的暂态过程的平稳性。
2.上升时间:tr
指输出量第一次到达稳态值所需的时间。
自动控制系统的性能指标
3.调节时间:ts
指输出量与稳态值之间的偏差达到所允许范围并 维持在此范围内所需的时间。
4.振荡次数:
指在ts内,输出量在稳态值附近上下波动的次数。
③持续振荡
x(t)
t
(a)给定突增
④发散振荡
x(t)
t
(a)给定突增
x(t)
t
(b)扰动突变
x(t)
t
(b)扰动突变
自动控制系统的性能指标
2、暂态性能指标
下图给出了系统对突加给定信号的动态响应。
xm ax
xc ()
tr tm
ts
自动控制系统的性能指标
1. 最大超调量:δ%
指输出量的最大值 与xmax 稳态xc (值)
自动控制系统的性能指标
y2 y1 x2
暂态(动态)
稳态(静态)
x1
t
自动控制系统的性能指标
一、稳态性能
描述了系统稳态时的稳定程度。 用稳态误差表示,它是指系统达到稳态时输 出量的实际值与期望值(给定值)之间的误差。 稳态误差越小,稳定精度越高。 稳态误差为零,称为无差系统。
二、暂态性能 描述系统从一个稳态到达另一个稳态期间
三、开环控制系统与闭环控制系统
例2 直流电动机闭环调速系统
U1
K U g
Dn n
Uf
CF
第一章:第二节
§1-2自动控制系统的性能指标
系统的状态行为 是指输出量受输入量的影响在时间方向上表现出
自动控制原理范文
自动控制原理范文自动控制原理是指通过采集和反馈系统的状态信息,根据一定的规则和算法实现对系统的自动调整和控制的一种技术。
它是现代工业自动化和信息技术的基础,广泛应用于电力、化工、石油、冶金、机械、交通运输和航空航天等各个领域。
自动控制原理的核心思想是通过测量系统的输出信号,与期望的参考信号进行比较,然后根据误差信息去调整系统的输入信号,使系统能在预期的性能要求下工作。
本文将从控制系统的基本概念、自动控制系统的组成、控制系统的闭环和开环两种结构、PID控制器等方面进行详细讲解。
一、控制系统的基本概念1.控制系统:由被控对象、控制器、传感器和执行器等组成,用于实现对被控对象状态或行为的调节。
2.被控对象:指需要被调节或控制的对象,也称作控制对象或物理对象。
3.反馈系统:通过传感器采集被控对象的状态信息,并将其送回控制器进行处理,然后生成相应的控制信号输入到执行器中。
4.开环系统:指没有反馈链路的控制系统,控制器的输出仅与被控对象相关,而不与被控对象的状态信息有关。
5.闭环系统:指具有反馈链路的控制系统,通过采集被控对象的状态信息,与期望的参考信号进行比较,产生误差信号,然后经过控制器进行处理生成控制信号,调整系统的输入信号。
二、自动控制系统的组成自动控制系统主要由四部分组成:被控对象、传感器、控制器和执行器。
被控对象接受控制器输出的控制信号,并给传感器提供输入信号,传感器采集被控对象的状态信息,将其转换成电信号送回控制器进行处理,控制器对传感器采集的信息进行比较并生成控制信号,最后控制器的输出信号通过执行器对被控对象进行调节。
三、控制系统的闭环和开环两种结构1.开环控制系统:开环系统的特点是系统的输出不受外界干扰和错误影响,控制器的输出仅与输入信号有关。
开环系统无法动态调整,当系统受到外界扰动时无法及时做出调整。
2.闭环控制系统:闭环系统引入了稳定反馈机制,通过比较控制器输出信号与期望参考信号之间的误差,调整输入信号,实现系统的自动调整和稳定。
闭环控制系统的例子及原理

闭环控制系统的例子及原理1. 家里的空调不就是个闭环控制系统嘛!它就像一个贴心的小管家,时刻感知着室内的温度。
当温度高了,它就会自动制冷,让室内变凉快;等温度低了呢,就停止制冷。
原理呢,就是通过温度传感器采集信息,反馈给控制系统,然后控制系统来指挥空调运行,这不是超厉害吗?2. 你看那电饭煲也是呀!它可以精确地控制煮饭的温度和时间呢。
比如水多了就煮久一点,水少了就调整温度,这不就是在自我调节嘛。
它的原理就是有个温度感应器和定时器之类的,能随时作出反应,简直就像个聪明的小厨师!3. 汽车的定速巡航系统不也很神奇嘛!开启后,就能保持一个稳定的速度行驶。
这不就是它自己在监控和调整速度呀。
它的工作原理就是通过各种传感器来掌握车速等信息,然后让车稳稳地跑,多牛啊!4. 咱们骑的电动车的速度控制系统也是哟!你想啊,你拧动把手,它就能根据你的要求加速减速。
原理就是把手的信号传递给控制系统,然后控制系统来决定给电机多少电,就像个很听你话的小跟班!5. 家用的智能马桶是不是没想到也是呀!它会自动调节水温啊、冲洗强度啥的。
它能根据你的设置和使用情况来调整,和闭环控制系统原理一样呢,有各种传感器在默默工作,太有意思啦!6. 哎呀,自动灌溉系统也是呢!它可以按照设定好的时间和湿度来给植物浇水。
它能知道土地干了还是湿了,然后决定浇不浇水,这多神奇。
就是通过湿度计之类的东西来感应,然后让系统作出正确的决定,就像个勤劳的园丁!7. 人体自身不就是一个超复杂的闭环控制系统嘛!比如体温调节,热了就出汗散热,冷了就打哆嗦产热。
这是身体内部各种机制在协同工作呀,多了不起。
就像一个无比精密的大机器在运作,真的很让人惊叹啊,不是吗?8. 再来看看工厂里的自动化生产线,那也是厉害得很呢!它可以精确地完成各种任务,有一点偏差就会自动调整。
这不就是有一双眼睛在时刻盯着嘛。
其原理就是通过一系列的检测和控制装置来保障生产的顺利进行,就像是一支训练有素的队伍在高效工作呀!总之,闭环控制系统真是无处不在,它们让我们的生活变得更加方便和智能呀!。
自动控制原理闭环控制实验原理
自动控制原理闭环控制实验原理一、自动控制原理自动控制是指在一定条件下,通过对被控对象进行测量、分析和处理,使其保持在预定状态或按照预定规律运行的一种技术。
自动控制系统由被控对象、传感器、执行机构、控制器和信号处理器等组成。
1.1 控制系统的基本组成(1)被控对象:指需要被调节或者控制的物理量或者过程。
例如,温度、压力、流量等。
(2)传感器:用于将被控对象的物理量转换为电信号。
例如,温度传感器、压力传感器等。
(3)执行机构:根据控制信号调节或者改变被控对象的状态。
例如,电机、阀门等。
(4)控制器:用于对传感器采集到的信号进行处理,并生成相应的控制信号。
例如,PID调节器等。
(5)信号处理器:用于对采集到的信号进行滤波、放大和修正等处理,并将其送入控制器中。
例如,放大电路和滤波电路等。
1.2 控制系统的分类根据反馈方式不同,可以将自动控制系统分为开环系统和闭环系统两种。
(1)开环系统:没有反馈,只能按照预定的规律进行运行。
例如,电风扇。
(2)闭环系统:通过反馈控制,可以使系统保持在预定状态或者按照预定规律运行。
例如,恒温器。
1.3 控制系统的稳定性分析控制系统的稳定性是指当系统受到外部干扰时,能够自动恢复到原来的状态。
稳定性分析是控制系统设计中非常重要的一部分。
常用的稳定性分析方法有:(1)根轨迹法:通过绘制根轨迹图来判断系统是否稳定。
(2)Nyquist法:通过绘制Nyquist图来判断系统是否稳定。
(3)Bode法:通过绘制Bode图来判断系统是否稳定。
二、闭环控制实验原理闭环控制实验是一种基于反馈控制原理的实验,旨在让学生了解闭环控制原理和PID调节器的工作方式,并且通过实验操作来加深对自动控制原理的理解和应用。
2.1 实验器材(1)PID调节器(2)电动机(3)温度传感器(4)温度调节仪(5)电源2.2 实验步骤(1)将温度传感器固定在电动机上,并将其连接到PID调节器的输入端口。
(2)将电动机连接到PID调节器的输出端口,并将其接通电源。
自动控制原理之开环控制和闭环控制系统图解机电一体化
自动把握原理之开环把握和闭环把握系统图解 - 机电一体化1:开环把握系统开环把握系统框图开环把握描述:即系统的输出端和输入端之间不存在相反的影响,在自动把握学科中称之为无反馈回路,故把这种系统称之为开环把握系统。
2:人工把握在工业生产过程或生产设备运行中,为了维持正常的工作条件。
往往需要对某些物理量(如温度、压力、流量、液位、电压、位移、转速等)进行把握,使其尽量维持在某个数值四周,或使其按肯定规律变化。
要满足这种需要,就要对生产机械或设备进行准时的操作和把握,以抵消外界的扰动和影响。
这种操作和把握,即可用人工操作完成,又可用自动装置的操作完成,前者称为人工把握或手动把握,后者称为自动把握。
人工把握的过程是:测量→求偏差→把握→再测量→再求偏差→再把握这样一种不断循环的过程。
其把握目的是要尽量减小偏差,使被控量尽可能地保持在期望值四周。
3、闭环把握系统闭环反馈把握系统的基本组成主要有以下几种:(1)给定元件:给出与期望输出对应的输入量。
(2)比较元件:求输入量与反馈量的偏差,常接受集成运算放大器(简称集成运放)来实现。
(3)放大元件:由于偏差信号一般较小,不足以驱动负载,故需要放大元件,包括电压放大及功率放大。
(4)执行元件:直接驱动被控对象,使输出量发生变化。
常用的有电动机、调整阀、液压马达等。
(5)测量元件:检测被控量并转换为所需要的电信号。
在把握系统中常用的有用于速度检测的测速发电机、光电编码盘等;用于位置与角度检测的旋转变压器、自整机等;用于电流检测的互感器及用于温度检测的热电偶等。
这些检测装置一般都将被检测的物理量转换为相应的连续或离散的电压或电流信号。
(6)校正元件:也叫补偿元件,是结构与参数便于调整的元件,以串联或反馈的方式连接在系统中,完成所需的运算功能,以改善系统的性能。
依据在系统中所处的位置不同,可分别称为串联校正原件和反馈校正元件。
自动控制原理三种控制方式

自动控制原理三种控制方式在我们的日常生活中,控制的概念无处不在。
比如说,你早上起床后,先给咖啡机设定好时间,让它准时为你煮一杯热腾腾的咖啡,这就是一种控制;又比如说,开车时,你踩油门加速,踩刹车减速,这同样是控制的一部分。
而在自动控制原理中,有三种主要的控制方式,它们分别是开环控制、闭环控制和自适应控制。
今天,我们就来轻松聊聊这三种控制方式,保证让你明白得透彻,像喝水一样简单!1. 开环控制1.1 概念简介首先,咱们从开环控制开始。
这种方式就像你给咖啡机按了个按钮,之后就不管它了。
它只按照你设定的程序运行,不会去检测实际的效果。
就像你放风筝,虽然风很大,但风筝飞不飞起来就全看运气了。
开环控制的优点是简单、成本低,不需要复杂的反馈系统。
1.2 实际例子想象一下你在家里烤蛋糕。
你把材料准备好,调好温度,放进烤箱,然后设定时间。
这个过程就是真正的开环控制。
你不去管蛋糕到底烤得怎么样,只要信任那个设定好的时间和温度就行。
不过,要是你忘了看时间,蛋糕可就可能变成“焦炭”了!哈哈,开环控制就有这样的风险,结果完全依赖于你一开始设定的参数。
2. 闭环控制2.1 概念简介接下来我们聊聊闭环控制。
这种控制方式就像你在开车时注意路况一样,能根据实际情况进行调整。
闭环控制系统会实时监测输出结果,如果结果跟预期不符,系统会自动调整。
就像你在玩游戏,手柄一抖,角色就会跳,马上按回去,避免掉下悬崖,聪明吧?2.2 实际例子想象你在家里养了一盆植物。
你每天都会观察植物的状态,如果发现叶子发黄,就会适当减少浇水或者调整光照。
这个过程就是闭环控制。
你在根据植物的实际情况不断调整自己的行为,确保它能够健康成长。
闭环控制的好处就是能实时反馈,适应变化,但缺点是需要更多的监测和调整,比较麻烦。
3. 自适应控制3.1 概念简介最后,咱们说说自适应控制。
这是一种更加高级的控制方式,它能根据环境的变化主动调整自己,就像是大海中的航行者,根据风向和潮流来调整帆的角度。
开环控制系统和闭环控制系统的例子
开环控制系统和闭环控制系统的例子
1. 你知道家里面的那种普通电扇吗?它就是开环控制系统的例子呀!你打开开关,它就一直转,完全不管周围温度啥样,只知道傻乎乎地转,这多直接!
2. 哎呀,那些自动贩卖机不也是嘛!你投了币,选择了商品,它就按照设定好的程序给你出货,根本不会因为你的喜好改变而改变,这是典型的开环控制系统呀!
3. 咱再想想,公园里的那种定时喷泉,到点就喷,管它有没有人看呢,可不就是开环控制系统嘛,多么形象!
4. 像空调的温度控制系统就是闭环控制系统啦!它会感知室内温度,热了就制冷,冷了就制热,这多贴心啊,不停地调整来让你舒服!
5. 还有啊,你想想汽车的定速巡航,它能根据车速的实际情况去调整油门,让车保持在设定的速度,这可是闭环控制系统在发挥作用呢!
6. 你家里如果有那种智能扫地机器人,它在清扫的过程中会根据环境去改变路线,避免碰撞,这就是闭环控制系统呀,多厉害!
7. 血压计不也是嘛!它能实时测量你的血压,然后告诉你结果,这就是一个不断反馈和调整的过程,闭环控制系统就在为你的健康服务呢!
8. 很多工厂里的生产线上的自动控制系统也是闭环的呀!它会根据产品的质量情况去调整生产参数,这不就是在努力做到最好吗,就像人一样会自我改进!
9. 智能灌溉系统也挺神奇的哟!它可以根据土壤的湿度来决定要不要浇水,多智能呀,绝对是闭环控制系统的优秀代表呢!
我觉得开环控制系统和闭环控制系统都有各自厉害的地方,在我们生活中真的太重要啦!它们让我们的生活变得更加方便、高效和智能呢!。
开环控制和闭环控制自动控制原理
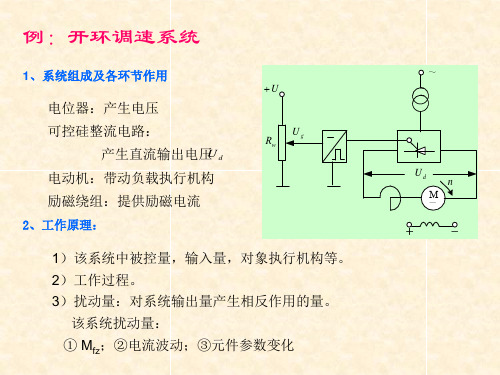
1、系统组成及各环节作用
电位器:产生电压 可控硅整流电路:
产生直流输出电压U d 电动机:带动负载执行机构 励磁绕组:提供励磁电流
2、工作原理:
U
Rw
Ug
1)该系统中被控量,输入量,对象执行机构等。 2)工作过程。 3)扰动量:对系统输出量产生相反作用的量。
该系统扰动量: ① Mfz;②电流波动;③元件参数变化
三.开环控制与反馈控制的比较
开环 优点 :结构简单,成本低廉,工作稳定,当输入信 号和扰动能预先知道时,控制效果较好。 缺点:不能自动修正被控制量的偏离,系统的元 件参数变化以及外来的未知扰动对控制精度影响 较大。
闭环 优点:具有自动修正被控制量出现偏离的能力, 可以修正元件参数变化以及外界扰动引起的误差, 控制精度高。 缺点:被控量可能出现振荡,甚至发散。
向通路与主反馈通路共同构成主回路。此外,还有局部反馈通路以及由
它构成的内回路。
• 反馈:输出量送回至输入端并与输入信号比较的过程 • 负反馈:反馈的信号是与输入信号相减而使偏差越来越小
3、闭环控制系统的特点
1) 系统输出量对控制作用有直接影响。 2)有反馈环节,并应用反馈减小误差。 3)当出现干扰时,可以自动减弱其影响。 4)系统可能工作不稳定。
~
Ud n
M
—
+
-
3、系统框图
输入量
控制装置
-
被控对象
输出量
输出量:控制系统的被控量-电机转速n 输入量:影响系统输出的外界输入-给定电压Ug
(给定输入、扰动输入) 控制装置:可控硅整流电路 被控对象:电动机
4、开环控制系统的特点
1)系统输出量对控制作用无影响 2)无反馈环节 3) 出现干扰靠人工消除 4)无法实现高精度控制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理概述及开闭环实例分析
摘要
本文简单介绍了自动控制的基本原理和发展概况,并从开环控制和闭环控制两方面对自动控制原理进行了详细介绍。
列举了开环控制和闭环控制的几个实例,结合实例分析了开环控制和闭环的优缺点,并对两种控制方式进行了对比。
关键词:自动控制、基本原理、开环、闭环
1自动控制基本原理及发展概述
所谓的自动控制,就是指在没有人直接参与的情况下,利用外加的设备(称为控制器)操作被控对象(如机器、设备或生产过程)的某个状态或参数(称为被控量),使其按预先设定的规律自动运行。
一般情况下自动控制理论的发展过程可以分为以下三个阶段:
1.1经典控制理论时期
时间为20世纪40-60年代,经典控制理论主要是解决单输入单输出问题,主要采用以传递函数、频率特性、根轨迹为基础的频域分析方法。
此阶段所研究的系统大多是线性定常系统,对非线性系统,分析时采用的相平面法一般不超过两个变量。
1.2现代控制理论时期
时间为20世纪60-70年代,这个时期由于计算机的飞速发展,推动了空间技术的发展。
经典控制理论中的高阶常微分方程可以转化为一阶微分方程组,用以描述系统的动态过程,这种方法可以解决多输入多输出问题,系统既可以是线性的、定常的,也可以是非线性的、时变的。
1.3大系统理论、智能控制理论时期
时间为20世纪70年代末至今,控制理论向着“大系统理论”和“智能控制”方向发展。
“大系统理论”是用控制和信息的观点,研究各种大系统的结构方案、总体设计中的分解方法和协调等问题的技术理论基础。
而“智能控制”是研究与模拟人类智能活动及其控制与信息传递过程的规律,研究具有某些仿人智能的工程控制与信息处理系统。
2自动控制系统分类
按照控制方式和策略,系统可分为开环控制系统和闭环控制系统。
2.1开环控制系统
开环控制系统是一种简单的控制系统,在控制器和控制对象间只有正向控制作用,系统的输出量不会对控制器产生任何影响,如图1所示。
在该类控制系统中,对于每一个输入量,就有一个与之对应的工作状态和输出量,系统的精度仅取决于元件的精度和执行机构的调整精度。
输入量控制量输出量
控制器控制对象
图1 开环控制系统
2.2闭环控制系统
闭环控制系统指的是系统输出量对控制作用有直接影响的一类控制系统。
在闭环控制系统中,需要对系统输出不断地进行测量、变换并反馈到系统的控制端与参考输入信号进行比较,产生偏差信号,实现按差别控制。
因此闭环控制又称为反馈控制,其控制结构如图2所示。
3 开环与闭环控制实例及优缺点分析
3.1开环控制
以走道路灯的声光控制系统为例,研究开环控制系统的特性。
声光自动控制白炽灯开关的基本工作原理如下:白天或夜晚光线较亮时,光控部分将开关自动关断,声控部分不起作用。
当光线较暗时,光控部分将开关自动打开,负载电路的通断受控于声控部分。
电路是否接通,取决于声音信号强度。
当声强达到一定程度时,电路自动接通,点亮白炽灯,并开始延时,延时时间到,开关自动关断,等待下一次声音信号触发。
这样,通过对环境声光信号的检测与处理,完成电路通断的自动开关控制。
其声控部分的参考框图如图3所示:
3.2闭环控制 以先进的汽车控制技术为例,研究汽车的纵向控制和横向控制。
3.2.1汽车的纵向控制
纵向控制是在行车速度方向上的控制,即车速以及本车与前后车或障碍物距离的自动控制。
巡航控制就是一种纵向控制。
这类控制问题可归结为对发动机输出和刹车的控制。
各种发动机模型、汽车运行模型和刹车过程模型与不同的控制器算法结合,构成了各种各样的纵向控制模式,典型结构如图4所示。
控制器 控制对象 偏差量 控制量 输出量 图2 闭环控制系统
反馈装置
输入量 刹车控制 刹车系统 车速 图4 纵向控制基本结构
发动机控制 发动机
传感器
车距 车 辆 控制器 设定目标 传动系 \灭 图3声控开环方框图 声—电传感器 走道灯 有\无声音 触点延时开关
汽车的纵向控制系统包括传动闭环控制和刹车闭环控制。
在传动闭环控制系统中,输入量为设定的车速;通过控制器,将输入量转换成控制量对发动机进行控制;通过调节节气门开度和发动机的转速,输出合适的车速;将输出的车速通过传感器反馈到控制器,与设定的车速进行比较,使输出车速按照输入车速进行变化。
刹车闭环控制的原理和传动闭环控制相似。
3.2.2汽车的横向控制
横向控制指垂直于运动方向上的控制,对于汽车也就是转向控制。
典型结构如图5所示。
汽车的横向控制系统是闭环控制,目标是控制汽车自动保持期望的行车路线,并在不同的车速、载荷、风阻、路况下有很好的乘坐舒适性,因此输入量为设定的行车路线;通过控制单元,将输入量转换成控制量对汽车的执行机构进行控制;输出量为偏移和偏移角;将偏移和偏移角通过姿态传感器反馈到控制单元,与输入量进行比较,使输出量按照输入量进行变化。
3.3开环与闭环控制优缺点分析
3.3.1开环与闭环控制系统的优缺点
开环控制系统的优点是结构简单,比较经济。
缺点是无法消除干扰所带来的误差。
同开环控制系统相比,闭环控制具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
但反馈回路的引入增加了系统的复杂性,而且增益选择不当时会引起系统的不稳定。
3.3.2开环与闭环控制系统的优缺点比较
主要从三方面比较:
工作原理:开环控制系统不能检测误差,也不能校正误差。
控制精度和抑制干扰的性能都比较差,而且对系统参数的变动很敏感。
因此,一般仅用于可以不考虑外界影响,或惯性小,或精度要求不高的一些场合。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定的因素,使校正行动更准确,更有力。
但它缺乏开环控制的那种预防性,如在控制过程中造成不利的后果才采取纠正措施。
因此,一般广泛应用于对外界环境要求比较高、高精度场合。
结构组成:开环系统没有检测设备,组成简单,但选用的元器件要严格保证质量要求。
闭环系统具有抑制干扰的能力,对元件特性变化不敏感,并能改善系统的响应特性。
稳定性:开环控制系统的稳定性比较容易解决。
闭环系统中反馈回路的引入增加了系统的复杂性。
偏移 图5 横向控制基本结构 控制单元 执行机构 姿态传感器
偏转角 车 辆 控制目标 转向系统 偏移 偏转角。