机器人学蔡自兴课后习题答案
人工智能及其应用(蔡自兴)课后答案

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
机器人学蔡自兴课后习题答案电子教案

机器人学蔡自兴课后习题答案其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA BA = ; 其中 ),(),(φθx Rot z Rot T AB = 。
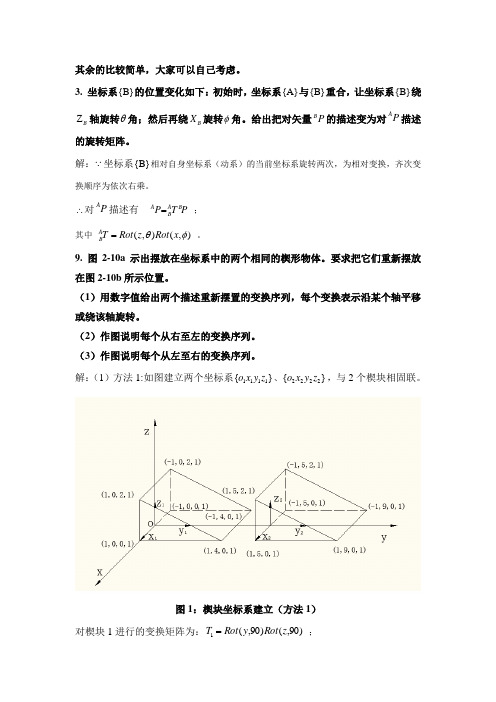
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111zyxo、}{2222zyxo与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1zRotyRotT=;对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(ooo2--=zRotxRotyRotTransTransT;所以:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=11111T;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1911212T。
《人工智能及其应用》(蔡自兴)课后习题答案第5章
第五章机器学习7-1 什么是学习和机器学习?为什么要研究机器学习?按照人工智能大师西蒙的观点,学习就是系统在不断重复的工作中对本身能力的增强或者改进,使得系统在下一次执行同样任务或类似任务时,会比现在做得更好或效率更高。
机器学习是研究如何使用机器来模拟人类学习活动的一门学科,是机器学习是一门研究机器获取新知识和新技能,并识别现有知识的学问。
这里所说的“机器”,指的就是计算机。
现有的计算机系统和人工智能系统没有什么学习能力,至多也只有非常有限的学习能力,因而不能满足科技和生产提出的新要求。
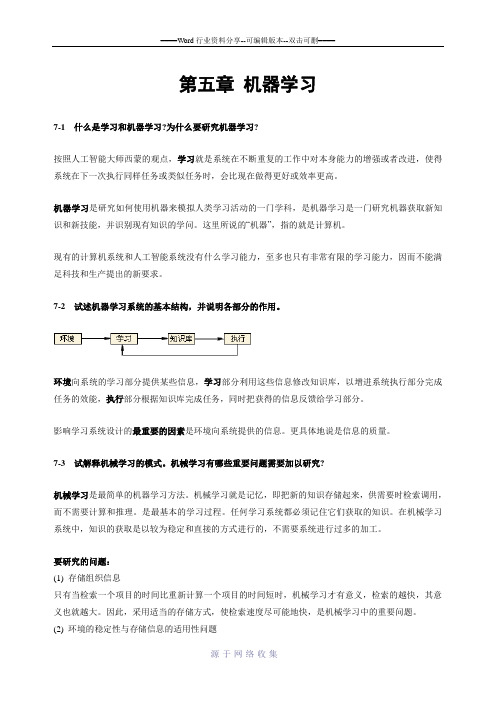
7-2 试述机器学习系统的基本结构,并说明各部分的作用。
环境向系统的学习部分提供某些信息,学习部分利用这些信息修改知识库,以增进系统执行部分完成任务的效能,执行部分根据知识库完成任务,同时把获得的信息反馈给学习部分。
影响学习系统设计的最重要的因素是环境向系统提供的信息。
更具体地说是信息的质量。
7-3 试解释机械学习的模式。
机械学习有哪些重要问题需要加以研究?机械学习是最简单的机器学习方法。
机械学习就是记忆,即把新的知识存储起来,供需要时检索调用,而不需要计算和推理。
是最基本的学习过程。
任何学习系统都必须记住它们获取的知识。
在机械学习系统中,知识的获取是以较为稳定和直接的方式进行的,不需要系统进行过多的加工。
要研究的问题:(1) 存储组织信息只有当检索一个项目的时间比重新计算一个项目的时间短时,机械学习才有意义,检索的越快,其意义也就越大。
因此,采用适当的存储方式,使检索速度尽可能地快,是机械学习中的重要问题。
(2) 环境的稳定性与存储信息的适用性问题机械学习基础的一个重要假定是在某一时刻存储的信息必须适用于后来的情况(3) 存储与计算之间的权衡如果检索一个数据比重新计算一个数据所花的时间还要多,那么机械学习就失去了意义。
7-4 试说明归纳学习的模式和学习方法。
归纳是一种从个别到一般,从部分到整体的推理行为。
归纳学习的一般模式为:给定:观察陈述(事实)F,假定的初始归纳断言(可能为空),及背景知识求:归纳断言(假设)H,能重言蕴涵或弱蕴涵观察陈述,并满足背景知识。
人工智能及其应用(蔡自兴)课后答案知识分享

人工智能及其应用(蔡自兴)课后答案第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后问题详解
第二章知识表示方法2-1状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系与异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为根底来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标〔要解决的问题〕出发逆向推理,建立子问题以与子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数确实定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案
第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案综述

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
【2024版】人工智能及其应用蔡自兴)课后答案
可编辑修改精选全文完整版人工智能及其应用(蔡自兴)课后答案第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用Si(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况: 1. nC=0 2. nC=33. nC=nY>=0 (当nC不等于0或3)用di(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
蔡自兴_人工智能课后答案【最新精选】

人工智能作业题1 - 1 什么是人工智能?试从学科和能力两方面加以说明。
1 - 4 现在人工智能有哪些学派?它们的任知观是什么?1 - 6 人工智能的主要研究和应用领域是什么?其中,哪些是新的研究热点?2 - 6 用谓词演算公式表示下列英文句子 ( 多用而不是省用不同谓词和项。
例如不要用单一的谓词字母来表示每个句子 ) 。
A computer system is intelligent if it can perform a task which,if performed by a human, requires intelligence.2 - 7 把下列语句表示成语义网络描述:(1) All man are mortal.(2) Every cloud has a silver liming.(3) All branch managers of DEC participate in a profit-sharing plan.2 - 9 试构造一个描述你的寝室或办公室的框架系统。
补充题:1 、张某被盗,公安局派出五个侦察员去调查。
研究案情时,侦察员 A 说“赵与钱中至少有一人作案”;侦察员 B 说“钱与孙中至少有一人作案”;侦察员 C 说“孙与李中至少有一人作案”;侦察员 D 说“赵与孙中至少有一人与此案无关”;侦察员 E 说“钱与李中至少有一人与此案无关”。
如果这五个侦察员的话都是可信的,试用归结演绎推理求出谁是盗窃犯。
3 -4 如何通过消解反演求取问题的答案?3 - 11 规则演绎系统和产生式系统有哪几种推理方式?各自的特点为何?3 - 6 下列语句是一些几何定理,把这些语句表示为基于规则的几何证明系统的产生式规则:(1) 两个全等三角形的各对应角相等。
(2) 两个全等三角形的各对应边相等。
3 - 17 把下列句子变换成子句形式:4 - 1 计算智能的含义是什么?它涉及哪些研究分支?4 - 6 构作一个神经网络,用于计算含有两个输入的 XOP 函数。
人工智能及其应用(蔡自兴)课后答案

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
(完整版)机器人学蔡自兴课后习题答案
其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
《人工智能及其应用》(蔡自兴)课后习题答案第3章
第三章搜索推理技术3-1什么是图搜索过程?其中,重排OPEN表意味着什么,重排的原则是什么?图搜索的一般过程如下:(1) 建立一个搜索图G(初始只含有起始节点S),把S放到未扩展节点表中(OPEN表)中。
(2) 建立一个已扩展节点表(CLOSED表),其初始为空表。
(3) LOOP:若OPEN表是空表,则失败退出。
(4) 选择OPEN表上的第一个节点,把它从OPEN表移出并放进CLOSED表中。
称此节点为节点n,它是CLOSED表中节点的编号(5) 若n为一目标节点,则有解并成功退出。
此解是追踪图G中沿着指针从n到S这条路径而得到的(指针将在第7步中设置)(6) 扩展节点n,生成不是n的祖先的那些后继节点的集合M。
将M添入图G中。
(7) 对那些未曾在G中出现过的(既未曾在OPEN表上或CLOSED表上出现过的)M成员设置一个通向n的指针,并将它们加进OPEN表。
对已经在OPEN或CLOSED表上的每个M成员,确定是否需要更改通到n的指针方向。
对已在CLOSED表上的每个M成员,确定是否需要更改图G中通向它的每个后裔节点的指针方向。
(8) 按某一任意方式或按某个探试值,重排OPEN表。
(9) GO LOOP。
重排OPEN表意味着,在第(6)步中,将优先扩展哪个节点,不同的排序标准对应着不同的搜索策略。
重排的原则当视具体需求而定,不同的原则对应着不同的搜索策略,如果想尽快地找到一个解,则应当将最有可能达到目标节点的那些节点排在OPEN表的前面部分,如果想找到代价最小的解,则应当按代价从小到大的顺序重排OPEN表。
3-2 试举例比较各种搜索方法的效率。
宽度优先搜索(1) 把起始节点放到OPEN表中(如果该起始节点为一目标节点,则求得一个解答)。
(2) 如果OPEN是个空表,则没有解,失败退出;否则继续。
(3) 把第一个节点(节点n)从OPEN表移出,并把它放入CLOSED扩展节点表中。
(4) 扩展节点n。
人工智能及其应用(蔡自兴)课后答案知识分享
人工智能及其应用(蔡自兴)课后答案第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
机器人学蔡自兴答案

机器人学蔡自兴答案【篇一:机器人学导论复习题及参考答案新】lass=txt>机器人学导论一、名词解释题:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
4.试论述机器人静力学、动力学、运动学的关系。
四、计算题:(需写出计算步骤,无计算步骤不能得分):位得到点t。
求u, v, w, t各点的齐次坐标。
2.如图所示为具有三个旋转关节的3r机械手,求末端机械手在基坐标系{x0,y0}下的运动学方程。
11pfx?0??5.如图所示的两自由度机械手,手部沿固定坐标系在手上x0轴正向以1.0m/s的速度移动,杆长可比矩阵为??l1s?1?l2s12j???l1c?1?l2c12?l2s12?? l2c12?26.如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称rpr机械手),求末端机械手的运动学方程。
参考答案一、名词解释题:二、简答题:1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2)机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。
2.答:目前常用的有如下几种形式:(1)横梁式。
机身设计成横梁式,用于悬挂手臂部件,具有占地面积小,能有效地利用空间,直观等优点。
(2)立柱式。
多采用回转型、俯仰型或屈伸型的运动型式,一般臂部都可在水平面内回转,具有占地面积小而工作范围大的特点。
(3)机座式。
可以是独立的、自成系统的完整装置,可随意安放和搬动。
也可以具有行走机构,如沿地面上的专用轨道移动,以扩大其活动范围。
(4)屈伸式。
臂部由大小臂组成,大小臂间有相对运动,称为屈伸臂,可以实现平面运动,也可以作空间运动。
(完整版)机器人学蔡自兴课后习题答案
其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ;对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(o o o 2--=z Rot x Rot y Rot Trans Trans T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10009010000121002T 。
机器人学蔡自兴课后习题答案

其余的比较简单,大家可以自己考虑。
3. 坐标系{B}的位置变化如下:初始时,坐标系{A}与{B}重合,让坐标系{B}绕描述AB的描述变为对PZ轴旋转角;然后再绕X B旋转角。
给出把对矢量PB的旋转矩阵。
解:坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
A;对P A A B描述有P T PBA其中T Rot(z,)Rot(x,)B。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系{1x y z}o2x y z,与2个楔块相固联。
o、{}111222图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o0o o T2Trans(3,0,4)Rot(z,90)TRot(x,90)Rot(z,180);21000其中01052T;0010000100100012所以:1000T;10100T2114 00010001对楔块2的变换步骤:①绕自身坐标系X轴旋转90;②绕新形成的坐标系的Z轴旋转180;③绕定系的Z轴旋转90;④沿定系的各轴平移(3,0,4)。
方法2:如图建立两个坐标系{o1x y z}、{o2x2y2z2}与参考坐标系重合,两坐标系111与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o o oT2Trans(2,0,9)Trans(4,0,0)Rot(y,90)Rot(x,180)Rot(z,90);00100012所以:1000T;101001000T。