机器人学蔡自兴课后习题参考答案
机器人学蔡自兴课后习题答案电子教案

机器人学蔡自兴课后习题答案其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA BA = ; 其中 ),(),(φθx Rot z Rot T AB = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ; 所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111zyxo、}{2222zyxo与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:)90,()90,(1zRotyRotT=;对楔块2进行的变换矩阵为:)90,()180,()90,()0,0,4()9,0,2(ooo2--=zRotxRotyRotTransTransT;所以:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=11111T;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=1911212T。
人工智能及其应用(蔡自兴)课后答案

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
《人工智能及其应用》(蔡自兴)课后习题答案第5章
第五章机器学习7-1 什么是学习和机器学习?为什么要研究机器学习?按照人工智能大师西蒙的观点,学习就是系统在不断重复的工作中对本身能力的增强或者改进,使得系统在下一次执行同样任务或类似任务时,会比现在做得更好或效率更高。
机器学习是研究如何使用机器来模拟人类学习活动的一门学科,是机器学习是一门研究机器获取新知识和新技能,并识别现有知识的学问。
这里所说的“机器”,指的就是计算机。
现有的计算机系统和人工智能系统没有什么学习能力,至多也只有非常有限的学习能力,因而不能满足科技和生产提出的新要求。
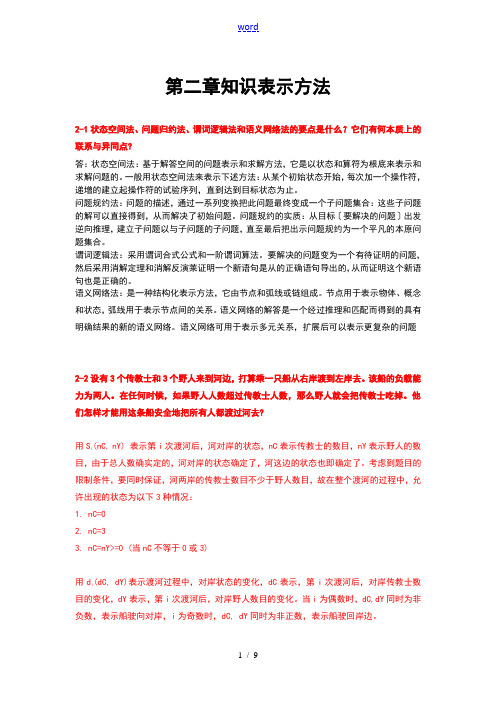
7-2 试述机器学习系统的基本结构,并说明各部分的作用。
环境向系统的学习部分提供某些信息,学习部分利用这些信息修改知识库,以增进系统执行部分完成任务的效能,执行部分根据知识库完成任务,同时把获得的信息反馈给学习部分。
影响学习系统设计的最重要的因素是环境向系统提供的信息。
更具体地说是信息的质量。
7-3 试解释机械学习的模式。
机械学习有哪些重要问题需要加以研究?机械学习是最简单的机器学习方法。
机械学习就是记忆,即把新的知识存储起来,供需要时检索调用,而不需要计算和推理。
是最基本的学习过程。
任何学习系统都必须记住它们获取的知识。
在机械学习系统中,知识的获取是以较为稳定和直接的方式进行的,不需要系统进行过多的加工。
要研究的问题:(1) 存储组织信息只有当检索一个项目的时间比重新计算一个项目的时间短时,机械学习才有意义,检索的越快,其意义也就越大。
因此,采用适当的存储方式,使检索速度尽可能地快,是机械学习中的重要问题。
(2) 环境的稳定性与存储信息的适用性问题机械学习基础的一个重要假定是在某一时刻存储的信息必须适用于后来的情况(3) 存储与计算之间的权衡如果检索一个数据比重新计算一个数据所花的时间还要多,那么机械学习就失去了意义。
7-4 试说明归纳学习的模式和学习方法。
归纳是一种从个别到一般,从部分到整体的推理行为。
归纳学习的一般模式为:给定:观察陈述(事实)F,假定的初始归纳断言(可能为空),及背景知识求:归纳断言(假设)H,能重言蕴涵或弱蕴涵观察陈述,并满足背景知识。
人工智能及其应用(蔡自兴)课后答案
For personal use only in study and research;not for commercial use第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY 表示,第i 次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后问题详解
第二章知识表示方法2-1状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系与异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为根底来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标〔要解决的问题〕出发逆向推理,建立子问题以与子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数确实定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案
For personal use only in study and research;not for commercial use第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY 表示,第i 次渡河后,对岸野人数目的变化。
人工智能及其应用(蔡自兴)课后答案综述

第二章知识表示方法2-1 状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?答:状态空间法:基于解答空间的问题表示和求解方法,它是以状态和算符为基础来表示和求解问题的。
一般用状态空间法来表示下述方法:从某个初始状态开始,每次加一个操作符,递增的建立起操作符的试验序列,直到达到目标状态为止。
问题规约法:已知问题的描述,通过一系列变换把此问题最终变成一个子问题集合:这些子问题的解可以直接得到,从而解决了初始问题。
问题规约的实质:从目标(要解决的问题)出发逆向推理,建立子问题以及子问题的子问题,直至最后把出示问题规约为一个平凡的本原问题集合。
谓词逻辑法:采用谓词合式公式和一阶谓词算法。
要解决的问题变为一个有待证明的问题,然后采用消解定理和消解反演莱证明一个新语句是从已知的正确语句导出的,从而证明这个新语句也是正确的。
语义网络法:是一种结构化表示方法,它由节点和弧线或链组成。
节点用于表示物体、概念和状态,弧线用于表示节点间的关系。
语义网络的解答是一个经过推理和匹配而得到的具有明确结果的新的语义网络。
语义网络可用于表示多元关系,扩展后可以表示更复杂的问题2-2 设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
他们怎样才能用这条船安全地把所有人都渡过河去?用S i(nC, nY) 表示第i次渡河后,河对岸的状态,nC表示传教士的数目,nY表示野人的数目,由于总人数的确定的,河对岸的状态确定了,河这边的状态也即确定了。
考虑到题目的限制条件,要同时保证,河两岸的传教士数目不少于野人数目,故在整个渡河的过程中,允许出现的状态为以下3种情况:1. nC=02. nC=33. nC=nY>=0 (当nC不等于0或3)用d i(dC, dY)表示渡河过程中,对岸状态的变化,dC表示,第i次渡河后,对岸传教士数目的变化,dY表示,第i次渡河后,对岸野人数目的变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精心整理
其余的比较简单,大家可以自己考虑。
3.坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然
后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A
描述的旋转矩阵。
解:Θ坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 其中T A B 9.图 (1 (2(3解:(1对楔块对楔块其中0
2T 所以:⎥⎥
⎥⎥⎦⎢⎢⎢
⎢⎣=1000
00100001
1T ;⎥⎥⎥⎥⎦
⎢
⎢⎢
⎢⎣-=10
00401000012T 对楔块2的变换步骤:
① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90;
④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。
图1:楔块坐标系建立(方法2)
对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T =; 对楔块2进行的变换矩阵为:
3213⎥
⎥
⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10
001000
111
1
111
11θθθθθθs L c s c L s c A ;⎥
⎥
⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡-=100
0100002222222
2
2θθθθθθs L c s c L s c A ; ⎥⎥
⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡-=100
010*******
333θθθθc s s c A ;
方法二进行建模:
坐标系的建立如图4所示。
图4:机械手的坐标系建立
根据所建坐标系得到机械手的连杆参数,见表2。
表2:机械手的连杆参数
连杆3的坐标系与末端执行器的坐标系相重合。
机械手的D-H 参数值见表3。
表3:机械手的连杆参数
注:关节变量04321====θθθθ。
将表3中的参数带入得到各变换矩阵分别为:
⎥⎥
⎥⎥⎦⎤⎢⎢⎢
⎢⎣⎡+-=1000
010010000012110
L L T ;⎥
⎥
⎥⎥⎦⎤
⎢
⎢⎢⎢⎣⎡=1000
010********
321L T ; ⎥⎥
⎥⎥⎦⎤⎢⎢⎢
⎢⎣⎡=100001000010001432
L T ;⎥⎥
⎥⎥⎦
⎤⎢
⎢⎢⎢⎣⎡=100
001000010000
13末
T 方法2建模:
⎦⎣1000
⎦⎣10001. 已知坐标系}C {对基座标系的变换为:⎥
⎥⎥⎥⎦
⎤⎢⎢⎢
⎢⎣⎡=100000013100
4010C ;对于基座标系的微分平移分量分别为
沿X 轴移动0.5,沿Y 轴移动0,沿Z 轴移动1;微分旋转分量分别为0.1,0.2和0。
(1) 求相应的微分变换;
(2) 求对应于坐标系}C {的等效微分平移与旋转。
解:(1)对基座标系的微分平移:T d ]1,0,5.0[=;
对基座标系的微分旋转:T ]0,2.0,1.0[=δ;
⎥⎥⎥⎥⎦
⎤⎢⎢⎢
⎢⎣⎡--=∆0000101.02.001.0005.02.000
;
⎥⎤⎢⎡-0001.05.0002
.0⎥
⎥
⎥⎥⎦⎤⎢
⎢⎢⎢⎣⎡+++-+=100001000)
()(0)()(223232
22323231
θθθθθθθθθθs L c s c L s c T ;⎥⎥
⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡-=100
010*********
32θθθθc s s c T ;E T =33; 由上式求得雅可比矩阵:
⎥⎥⎥
⎥⎥⎥
⎥⎥⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢⎣⎡=110
00000000000003232θθc L s L J T
; 2)使用方法2建模,使用微分变换法。
图8:机械手的坐标系建立
表6:D-H 参数表。