一种用于空巢老人陪护的远程医疗服务机器人设计——软件及控制系统设计
远程控制的医疗陪护机器人的制作方法
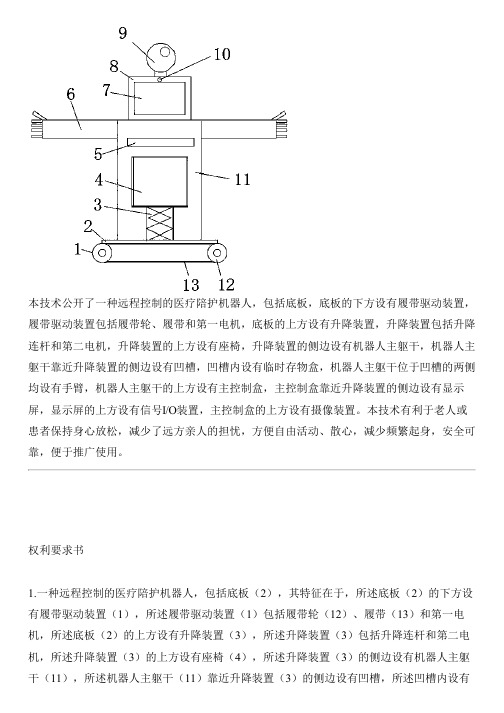
本技术公开了一种远程控制的医疗陪护机器人,包括底板,底板的下方设有履带驱动装置,履带驱动装置包括履带轮、履带和第一电机,底板的上方设有升降装置,升降装置包括升降连杆和第二电机,升降装置的上方设有座椅,升降装置的侧边设有机器人主躯干,机器人主躯干靠近升降装置的侧边设有凹槽,凹槽内设有临时存物盒,机器人主躯干位于凹槽的两侧均设有手臂,机器人主躯干的上方设有主控制盒,主控制盒靠近升降装置的侧边设有显示屏,显示屏的上方设有信号I/O装置,主控制盒的上方设有摄像装置。
本技术有利于老人或患者保持身心放松,减少了远方亲人的担忧,方便自由活动、散心,减少频繁起身,安全可靠,便于推广使用。
权利要求书1.一种远程控制的医疗陪护机器人,包括底板(2),其特征在于,所述底板(2)的下方设有履带驱动装置(1),所述履带驱动装置(1)包括履带轮(12)、履带(13)和第一电机,所述底板(2)的上方设有升降装置(3),所述升降装置(3)包括升降连杆和第二电机,所述升降装置(3)的上方设有座椅(4),所述升降装置(3)的侧边设有机器人主躯干(11),所述机器人主躯干(11)靠近升降装置(3)的侧边设有凹槽,所述凹槽内设有临时存物盒(5),所述机器人主躯干(11)位于凹槽的两侧均设有手臂(6),所述机器人主躯干(11)的上方设有主控制盒(8),所述主控制盒(8)靠近升降装置(3)的侧边设有显示屏(7),所述显示屏(7)的上方设有信号I/O装置(10),所述主控制盒(8)的上方设有摄像装置(9)。
2.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述主控制盒(8)与第一电机、第二电机、手臂(6)和摄像装置(9)相连。
3.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述主控制盒(8)内设有控制模块以及动力电源。
4.根据权利要求1所述的一种远程控制的医疗陪护机器人,其特征在于,所述信号I/O装置(10)与主控制盒(8)和远程手机或者电脑客户终端连接。
空巢老人陪伴型机器人设计

2019.18科学技术创新1概述根据国家统计局数据显示,截止到2017年,中国60周岁及以上老年人口共计2.408亿;预计到2025年,这一人口数量将达到4亿,我国将成为世界上老年人占比最大的国家。
人口老龄化日益严重,空巢老人所占比重迅速攀升,一系列的社会问题亟待解决。
空巢老人由于没有亲人的陪伴,长期处于孤独的状态,从而引发一系列的生理、心理问题,如身体健康状况得不到重视,产生焦虑、抑郁心理疾病,所以给予空巢老人应有的关怀与陪伴已经刻不容缓。
日本作为目前世界上人口老龄化比较严重的国家,投入了大量的人力物力致力于老人陪伴机器人的研究,并且在近几年也取得了一些成果。
如图1所示:日本高校科研机构历时数年所研发的“TWENDY-ONE ”机器人,这款机器人可以辅助老人起床,并且可以自主行走,自行判断,避开障碍物;日本索尼公司在近几年推出的新一代机器人狗“爱宝”,该机器人可以感知外界的距离,并且具有发声和处理声音的功能,与其他陪伴型机器人不同,它的主要功能变成了娱乐;松下电器推出的老人陪伴机器人“泰迪”可以实现与老人的连续沟通;欧姆龙公司推出的机器人“尼克罗”采用人工毛皮,集成传感和人工智能技术,可以对主人表达自己的感受。
图1c.将底板通过仿真器与PC 机连接,可以通过CCS6界面显示出气压、海拔等信息。
结束语本文基于OMAPL138为处理器的ARM/DSP 双核架构,实现对GPS 和INS 信号的接收及处理,从而设计了GPS/INS 组合定位系统,实时显示当前位置的经纬度,气压等信息。
参考文献[1]赵胜林.一种GPS 导航定位仪设计与应用研究[D].哈尔滨:哈尔滨工业大学,2005.[2]马宏阳,程鹏飞,黄华东.GPS/INS 位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.[3]Xue Y,Liu C,Chen Y,et al.Design and Realization of In -ertial Attitude Determination System Based on OMAPL138and FPGA[J].Computer Measurement &Control,2017.[4]赖贵川,黄华伟.基于MS5611-01BA01的高精度气压和温度检测系统设计[J].四川理工学院学报(自科版),2012,25(5):33-36.[5]朱阳,王伟成,王民慧.基于MPU9150的四轴飞行器姿态控制系统设计[J].制造业自动化,2015(10):46-48.作者简介:唐立伟(1975-),男,研究方向:工业控制。
关注空巢老人自助医疗护理器械产品设计
关注空巢老人自助医疗护理器械产品设计作者:赵超来源:《设计》2012年第02期摘要:随着21世纪的到来,我国人口老龄化的速度加快,空巢老人现象也日益加剧,如何解决空巢老人的护理问题已经成为社会的焦点。
现如今,传统家庭养老的功能已经日益弱化,虽然空巢老人对医疗卫生服务的需求不断增加,但是医疗护理器械尤其是自助医疗护理在国内发展相对滞后,远远不能够满足空巢老人对医疗护理的需求。
因此,积极探索新形势下发展空巢老人自助医疗器械的新途径、新办法,已势在必行。
关键词:空巢老人护理器械自助医疗当与子女分开之后,面对空荡的房间和漫长的独独居生活,空巢老人在身心健康方面会受到一定的影响,在此情况下,会产生各种心理反应。
与此同时,空巢老人也面临着身体状况越来越差、患病率越来越高、行为不便等问题。
例如,高血压病、糖尿病、心脏病等都是老年人的常见病,这些疾病一旦形成,则很难治愈,而且常伴有不可逆的并发症,需要终生治疗及护理,既损害老年人的躯体健康,又影响了老年人的日常生活活动能力。
现代社会,居家养老已经成为一种趋势,虽然现阶段老年人的家庭医疗护理方面较过去有了一定的改善,但是对于许多的空巢老人而言,现阶段的医疗护理水平仍然不能满足他们的需求,因此,解决老年人尤其是空巢老人在自助医疗护理方面中面临的问题将会是未来阶段的研究重点。
所谓“自助医疗器械”,就是使用者在不借助他人的情况下,仅仅依靠使用者本人一个人的力量,并在可操控范围之内便可完成治疗动作的医疗器械称之为自助医疗器械。
空巢老人除了具有与一般老年人的共性外,由于其不与家庭和成员或是相关护理人员居住,因此,在产品设计方面应该区别于普通老年人。
一、现阶段空巢老人家庭医疗护理器械的发展现状近年来,随着医疗器械的不断发展,家庭医疗护理器械的种类也在日益更新。
老年人的数量急剧增加,导致市场需求不断扩大。
政府和企业对这个特殊群体需求的关注也在的日益增长。
即使如此,现阶段空巢老人产品市场发展仍面临着诸多的问题。
助老服务机器人系统设计及软件架构
助老服务机器人系统设计及软件架构助老服务机器人系统设计及软件架构一、引言随着全球人口老龄化趋势的加剧,助老服务的需求日益增长。
然而,人口老龄化也带来了社会护理员短缺的问题。
为了解决这一难题,助老服务机器人应运而生。
本文将介绍助老服务机器人系统的设计和软件架构,以满足老年人的日常需求和提供必要的协助。
二、助老服务机器人的主要功能助老服务机器人的主要功能包括但不限于以下几个方面: 1. 日常陪伴和交流:助老服务机器人能够陪伴老年人进行日常交流,提供心理支持,减轻他们的孤独感。
2. 生活照料:助老服务机器人可以协助老年人进行日常生活照料,如帮助洗衣、煮饭、清洁等。
3. 健康监测:助老服务机器人配备身体健康监测装置,可以实时监测老人的体温、血压等生理参数,及时发出警报并通知相关人员。
4. 个性化推荐:通过了解老年人的喜好和需求,助老服务机器人可以提供个性化的推荐,如电影、音乐、书籍等。
提供兴趣爱好的满足,增加生活乐趣。
三、助老服务机器人系统设计助老服务机器人系统设计主要包括硬件设计和软件设计两个方面。
硬件设计方面,助老服务机器人需要具备以下硬件组件:1. 语音识别和合成模块:用于与老年人进行语音交流,并根据指令进行相应操作。
2. 视觉感知模块:通过摄像头获取环境信息,实现人脸识别、情绪识别等功能。
3. 运动控制模块:通过电机和传感器实现机器人的运动控制,包括行走、抓取等。
4. 健康监测装置:包括体温、血压、心率等传感器,用于老年人健康状态的监测。
软件设计方面,助老服务机器人需要具备以下软件功能:1. 语音交互系统:通过语音识别和合成技术实现与老年人的语音交流,提供日常问答、聊天等功能。
2. 智能推荐系统:根据老年人的个人喜好和需求,为其提供个性化的推荐,如电影、音乐等。
3. 行为规划系统:根据老年人的日常需求和习惯,制定相应的行为规划,自动完成日常生活中的一些任务。
4. 健康监测系统:与健康监测装置相连接,实时监测老年人的生理参数,并根据预设的阈值进行相应处理。
老年陪护机器人系统的设计与实现
【Key words】escort robot;speech recognition;underactuated flexible system
1 引 言
全 国老龄办 关 于人 口老龄 化 的报告 认 为 ,21世 纪 的中 国将 是 一个 不可 逆转 的 老龄社 会 。在 当前 阶 段 ,中国将 平均每年新 增 596万老年 人 口 ,到 2020年 , 老 年人 口将 达 到 2.48亿 。随 着 中国老 年人 数量 的增 加 ,“421”家庭 数量 激增 ,调 查显 示 :有 35% 的家庭要 赡 养 4位 老 人 ,49% 的城 市 家庭 要 赡养 2~3位 老 人 。 针对 老年人 的心理 孤寂及 “心理养 老”的需求 ,根据 老 年 人使 用 的趣 味性 、功 能性 和易操 作性 要求 ,研 制 开 发 老年陪 护机器人产 品 ,填 补 国内老年陪护机 器人产 品空 白的需求变得尤 为迫切 。
proposed to realize high simulative drive frame and motion models at a low cost.In this paper,the total frame
of robot system , speech recognition system and m otor control system are introduced.
technology is used to build robust recognition model,realize high per formance and real-time speech recognition
system. Based on modeling movements of real animals, an underaetuated f lexible motor control system is
一种家用助老机器管家的设计
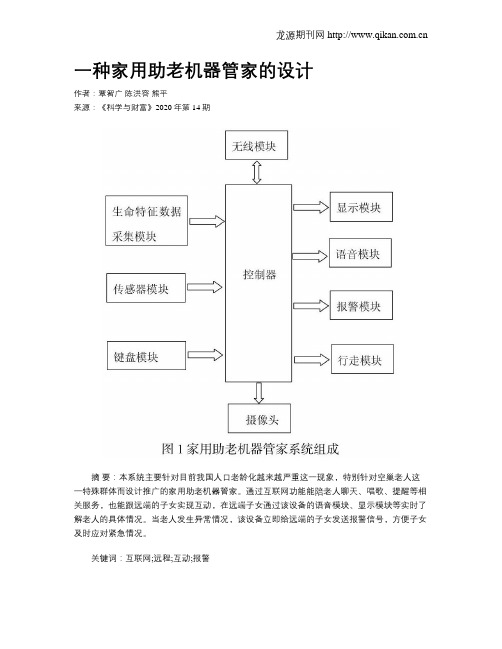
一种家用助老机器管家的设计作者:覃智广陈洪容熊平来源:《科学与财富》2020年第14期摘要:本系统主要针对目前我国人口老龄化越来越严重这一现象,特别针对空巢老人这一特殊群体而设计推广的家用助老机器管家。
通过互联网功能能陪老人聊天、唱歌、提醒等相关服务,也能跟远端的子女实现互动,在远端子女通过该设备的语音模块、显示模块等实时了解老人的具体情况。
当老人发生异常情况,该设备立即给远端的子女发送报警信号,方便子女及时应对紧急情况。
关键词:互联网;远程;互动;报警一、必要性我国已经进入人口老龄化快速发展时期,目前已有老龄人口1.69亿,占总人口数的12%,据全国老龄办统计数据显示,有近一半的老人属于城乡空巢家庭或类空巢家庭。
养老问题,尤其是空巢老人问题,已经成为全社会共同关注的话题。
所以,为了缓解社会压力的,解决许多子女无暇照顾老人的这种情况,家用助老机器管家已经成为一种新的迫切的社会需求。
家用助老机器管家这一块是一个前景十分光明的行业,首先,从国家层面来说,我国人口老龄化程度越来越严重,这是一个客观的现实,国家要解决这方面的问题,必须要大力支持这些高科技,为国家解决空巢老人这一社会问题;其次,从社会角度来分析,现在,由于国家之前的独生子女政策,许多年迈的父母家中都只有一个孩子,而如果两个独生子女孩子的结合,将给孩子带来非常重的负担,所以,传统的在家养老的情况已经是不可能的了,所以社会更需要养老这方面的诉求。
家用助老机器管家的发展潜力巨大,市场应用前景广阔!二、发展现状相比工业机器人,服务机器人特别是其中的助老机器人,属于新兴行业,全球规模较大的服务机器人企业产业化历史也多在5-10年,大量公司仍处于前期研发阶段;另一方面,服务机器人更加靠近下游终端消费者且应用场景千差万别,客户群体更加广泛。
因此,服务机器人的市场空间比工业机器人更加广阔。
从全球范围来看,世界各国纷纷将突破服务机器人技术、发展服务机器人产业摆在本国科技发展的重要战略地位。
“友依”空巢老人智能陪伴产品设计

“友依”空巢老人智能陪伴产品设计汇报人:2023-12-16•产品背景与需求分析•产品功能设计•产品硬件设计目录•产品软件设计•产品测试与优化•产品推广与市场策略•总结与展望01产品背景与需求分析空巢老人常常感到孤独和无助,缺乏与他人的交流和互动。
孤独感安全问题生活不便空巢老人在家中可能面临一些安全隐患,如突发疾病、意外摔倒等,而无人知晓。
随着年龄的增长,空巢老人可能会遇到一些生活上的困难,如购物、做饭、洗衣等。
030201空巢老人现状及问题空巢老人对智能家居产品的需求较高,如智能门锁、智能照明、智能家电等。
智能家居需求空巢老人需要定期监测身体状况,如血压、血糖、心率等,以便及时发现并处理健康问题。
健康监测需求空巢老人渴望与他人保持联系和交流,分享生活点滴和感受。
社交互动需求市场需求调研一款专为空巢老人设计的智能陪伴产品,集智能家居控制、健康监测、社交互动等功能于一体。
产品定位年龄在60岁以上,子女不在身边或无法经常陪伴的空巢老人。
目标用户产品定位与目标用户02产品功能设计智能语音交互功能语音输入与识别支持老人通过语音与设备进行交互,设备能够准确识别老人的语音指令。
自然语言处理设备能够理解老人的自然语言表达,进行智能回答和交流。
语音合成与输出设备可将文字信息转化为语音输出,方便老人听取信息。
生理参数监测实时监测老人的心率、血压、血氧等生理参数,并进行分析和记录。
健康提醒根据老人的生理参数及日常习惯,提供个性化的健康提醒和建议。
异常预警当监测到老人生理参数异常时,及时发出预警并通知紧急联系人。
健康监测与提醒功能030201提供丰富的音乐资源,支持老人通过语音或触摸操作播放喜欢的音乐。
音乐播放内置大量有声读物资源,满足老人阅读需求,同时缓解视觉疲劳。
有声读物提供适合老人的益智游戏,锻炼老人的思维能力和反应速度。
益智游戏娱乐休闲功能支持老人通过一键操作呼叫紧急联系人,确保在紧急情况下能够及时获得帮助。
医疗服务机器人控制系统设计
医疗服务机器人控制系统设计1. 引言1.1 背景介绍医疗服务机器人控制系统设计,是当前机器人技术和医疗服务领域交叉发展的重要领域之一。
随着人口老龄化加快和医疗需求不断增长,医疗服务机器人在手术、康复、护理等方面的应用愈发广泛。
目前医疗服务机器人控制系统设计仍存在一些问题和挑战,需要进一步研究和探索。
医疗服务机器人控制系统的设计背景是由于人类医疗资源有限、分布不均等问题,加之医务人员工作强度大、效率低等诸多因素所致。
引入机器人技术来辅助医疗服务已成为当前的发展趋势。
医疗服务机器人不仅可以提高医疗服务质量和效率,还可以减轻医务人员的工作压力,提高医疗资源利用率。
随着科技的不断发展和创新,医疗服务机器人控制系统设计正在逐渐完善和优化。
越来越多的研究和实践证明,医疗服务机器人在治疗和康复过程中能够取得显著的效果和成就。
加强医疗服务机器人控制系统设计的研究,对提高医疗服务水平、推动医疗服务机器人技术的发展具有重要意义。
1.2 研究意义医疗服务机器人控制系统是一种集合了机器人技术与医疗服务的创新技术。
研究医疗服务机器人控制系统的意义在于提高医疗服务的效率和质量,缓解医疗资源不足的问题,同时也为医护人员减轻工作负担,提高工作效率。
通过医疗服务机器人控制系统的设计和应用,可以实现医疗服务的自动化、智能化,提高手术精准度和安全性,将手术时间缩短,减少感染风险,进而提高患者的治疗效果和生存率。
医疗服务机器人控制系统还可以结合大数据、人工智能等技术,为临床决策提供更加准确的数据支持,提高疾病诊断和治疗的准确性。
研究医疗服务机器人控制系统的意义还在于推动医疗服务向智能化、高效化的方向发展,促进医疗行业的技术创新和发展。
这项研究也为我国在医疗机器人领域的发展提供了重要的技术支持,具有重要的战略意义和推动作用。
2. 正文2.1 医疗服务机器人控制系统基本组成医疗服务机器人的控制系统是实现机器人功能的核心部分,其基本组成包括传感器、执行器、控制器和通信模块。
《2024年助老服务机器人系统设计及软件架构》范文
《助老服务机器人系统设计及软件架构》篇一一、引言随着科技的快速发展,机器人在医疗保健领域,尤其是为老年人提供服务方面的应用逐渐普及。
助老服务机器人系统的出现,旨在通过科技的力量改善老年人的生活质量,为他们的日常生活带来便利。
本文将深入探讨助老服务机器人系统的设计思路和软件架构。
二、系统设计概述助老服务机器人系统设计主要围绕老年人的实际需求进行。
从生活照料、健康管理、安全监控等方面入手,通过科技手段为老年人提供全方位的服务。
(一)生活照料机器人可以协助老年人完成一些日常生活中的琐碎事务,如取物、扫地、洗碗等。
此外,还可以为老年人提供定时提醒、购物、送餐等服务,减轻他们的生活压力。
(二)健康管理助老服务机器人具备健康监测功能,可以定期为老年人测量血压、血糖等生理指标,并将数据上传至云端进行分析。
同时,机器人还可以提供健康咨询、药物提醒等服务,帮助老年人更好地管理自己的健康。
(三)安全监控机器人具备智能感知和定位功能,可以实时监测老年人的活动范围,一旦发现异常情况,如跌倒、长时间无活动等,立即向家人或医护人员发送警报。
此外,机器人还可以与智能家居系统相连,实现家庭环境的智能化管理。
三、软件架构设计助老服务机器人系统的软件架构设计是系统实现的关键。
一个优秀的软件架构应具备高可靠性、高可用性、可扩展性等特点。
(一)系统架构助老服务机器人系统的软件架构采用分层设计,包括感知层、控制层、应用层和服务层。
感知层负责获取老年人的各种信息;控制层负责处理感知层的数据,并发出指令;应用层负责实现各种功能模块;服务层则负责与云端进行数据交互和远程控制。
(二)数据库设计数据库是助老服务机器人系统的核心组成部分,用于存储老年人的各种信息。
数据库设计应考虑数据的结构化、安全性和可扩展性。
可以设计多个数据表,分别存储老年人的基本信息、健康数据、活动记录等。
同时,应采取加密措施,确保数据的安全性。
(三)交互界面设计交互界面是助老服务机器人系统与老年人进行沟通的桥梁。
《2024年助老服务机器人系统设计及软件架构》范文
《助老服务机器人系统设计及软件架构》篇一一、引言随着人口老龄化趋势的加剧,老年人的生活照料和健康管理问题日益凸显。
为了更好地满足老年人的需求,助老服务机器人系统的设计和开发变得尤为重要。
本文将介绍一种助老服务机器人系统的设计思路和软件架构,以期为解决老年人生活中遇到的问题提供一种有效手段。
二、系统设计(一)设计目标助老服务机器人系统的设计目标是为老年人提供安全、便捷、舒适的生活环境,帮助他们解决生活中的各种问题,提高生活质量。
系统应具备以下特点:1. 智能化:能够根据老年人的需求和习惯进行自主学习和调整。
2. 便捷性:操作简单,易于使用。
3. 安全性:确保老年人的安全,避免意外事故的发生。
4. 舒适性:为老年人提供舒适的生活环境。
(二)功能模块助老服务机器人系统主要包括以下几个功能模块:1. 运动控制模块:负责机器人的移动和姿态调整,以适应不同的环境和使用需求。
2. 语音交互模块:实现与老年人的语音交流,了解他们的需求和指令。
3. 健康监测模块:监测老年人的健康状况,如心率、血压等,及时发现异常情况并报警。
4. 生活照料模块:协助老年人完成日常生活中的各种任务,如取物、打扫卫生等。
5. 娱乐休闲模块:为老年人提供娱乐休闲功能,如听音乐、看电影等。
三、软件架构(一)整体架构助老服务机器人系统的软件架构采用分层设计,主要包括应用层、服务层、设备层和感知层。
其中,应用层负责与用户进行交互;服务层负责处理各种业务逻辑;设备层负责控制机器人的硬件设备;感知层负责获取环境信息和用户指令。
(二)详细设计1. 应用层:采用图形化界面或语音交互方式,方便老年人使用。
界面设计应简洁明了,易于操作。
同时,应提供多语言支持,以满足不同老年人的需求。
2. 服务层:负责处理各种业务逻辑,包括健康监测、生活照料、娱乐休闲等。
采用微服务架构,将不同功能模块拆分成独立的服务,便于开发和维护。
3. 设备层:控制机器人的硬件设备,包括电机、传感器等。
智能伴老机器人控制系统设计
第24期2023年12月无线互联科技Wireless Internet Science and TechnologyNo.24December,2023作者简介:郁李鑫(1995 ),女,江苏南通人,助理实验师,硕士研究生;研究方向:人工智能㊂智能伴老机器人控制系统设计郁李鑫1,2,朱㊀妍1(1.无锡太湖学院,江苏无锡214063;2.南京信息工程大学,江苏南京210000)摘要:现代社会面临着全球性人口老龄化问题,智能伴老机器人作为一种新型辅助生活机器人,可为老年人提供多样化服务㊂文章设计了基于51单片机的智能伴老机器人控制系统㊂在硬件设计上,采用TCRT5000传感器实现红外避障,采用SU -03T 离线语音识别模组和DY -SV17F 智能语音模块相结合实现与使用者的语音交互,采用MQ5可燃气传感器和蜂鸣器组合成可燃气报警器,将MX1508型号双路有刷直流马达驱动电路作为小车的动力驱动,利用TP4056型号单节锂离子电池给系统进行供电㊂该款智能伴老机器人具有精度高㊁易操作㊁外形轻巧㊁音量大等特点,贴合目标群体的使用习惯㊂关键词:智能伴老机器人;51单片机;红外线避障;可燃气传感器;语音识别中图分类号:TP23㊀㊀文献标志码:A0㊀引言㊀㊀随着全球老龄化进程的加速,老年人的生活和健康状况已成为一个全球性的问题㊂智能伴老机器人为解决老年人生活中的各种问题提供了一种新的思路和手段㊂在此背景下,研究智能伴老机器人具有提高老年人生活质量㊁推动产业发展㊁推进老龄化社会建设等意义㊂本文旨在提供一种合理的智能伴老机器人控制系统,系统设计的过程中充分发挥51单片机灵活性㊁兼容性强㊁体积小㊁能耗低的特点㊂1㊀国内外的发展概况1.1㊀国内发展概况㊀㊀国内智能伴老机器人的发展前景非常广阔,随着老龄化趋势加剧㊁家庭结构单核化等,老年人需要得到更多的关注和照顾㊂目前,国内智能伴老机器人的应用已经涵盖了医疗机构㊁养老机构㊁居家护理等多个领域㊂目前,一些中国的科技公司和机器人企业已经开始研发智能伴老机器人,并逐步投入市场应用㊂UBTECH 是一家总部位于深圳的人工智能和机器人公司,致力于研发和生产各类机器人产品,其中包括智能伴老机器人㊂其智能伴老机器人可以提供健康监测㊁语音交互㊁情感陪伴㊁生活照料等服务;达闼科技是一家总部位于杭州的人工智能和机器人企业,其智能伴老机器人可以通过图像识别㊁语音识别㊁姿态感知等技术,为老年人提供陪伴㊁娱乐㊁健康监测等服务㊂其产品已经在多个养老机构和医疗机构得到应用㊂然而,国内智能伴老机器人的市场份额还比较小,主要原因是机器人技术的发展还比较新,市场需求和技术瓶颈等问题还需要不断地解决㊂此外,由于智能伴老机器人涉及老年人的隐私和安全等问题,还需要政府和监管机构的支持和规范㊂随着中国老龄化的加剧,智能伴老机器人将逐渐成为老年人关注的热门话题,也将成为未来中国机器人产业发展的重要方向之一㊂1.2㊀国外发展概况㊀㊀智能伴老机器人作为一种新兴的人工智能应用,在世界范围内得到了越来越多的关注和研究㊂日本是全球老龄化最为严重的国家之一,也是重点研发智能伴老机器人的国家之一㊂例如,日本的索尼公司就推出了一款名为 Aibo 的智能伴老机器人,可以通过人脸识别㊁语音识别等技术与老年人进行交互和陪伴㊂美国也是研发生产智能伴老机器人的重要国家之一㊂例如,美国的RoboKind 公司推出了一款名为 Milo 的机器人,可以通过视觉识别和语音识别技术与老年人进行互动,帮助老年人提高社交能力和语言表达能力㊂智能伴老机器人在全球范围内得到了越来越多的研究和应用,不同国家和地区的企业和机构都在探索如何利用人工智能技术,为老年人提供更好的生活服务㊂2㊀系统论证方案与设计㊀㊀2.1㊀总体方案设计㊀㊀本系统主要由红外避障模块㊁语音播报模块㊁语音识别模块㊁烟雾报警模块㊁按键模块等组成㊂2.2㊀红外避障模块㊀㊀机器人系统作为一个需要可以自主移动的系统,整体将搭载在一个小车状的模型上,因此,避障模块是模型中的核心模块之一㊂红外避障模块的工作原理是发光管发出红外光,光敏接收管接收前方物体反射光,据此判断前方是否有障碍物㊂根据反射光的强弱可以判断物体的距离,它的原理是接收管接收的光强弱随反射物体距离的变化而变化,距离近则反射光强,距离远则反射光弱[1]㊂本文采用红外反射传感器作为避障模块的核心元器件,结合单片机进行控制㊂红外传感器避障模块具有成本低㊁体积小㊁灵敏度高等优点,还可以通过转动其上方的电位器来调节检测范围,符合预期要求㊂在硬件设计方面,红外避障模块通过在模型前端布置一个红外反射传感器,让模型能够识别到前进路线上的障碍㊂红外反射传感器模块包括一个红外发射管和一个光敏二极管,通过发射红外线并接收反射光信号,判断模型当前位置是否可以行进,从而调整模型的运动方向㊂另外,在模型上设置一个按键,按下按键,模型开始行动,再次按下则停止㊂在软件设计方面,本设计采用if函数对机器人模型的前进㊁后退㊁转弯㊁刹车等进行控制㊂2.3㊀语音播报模块与语音识别模块㊀㊀为了满足智能伴老机器人的语音提示和交互功能,需要设计一个语音播报模块㊂(1)方案一㊂该模块可以通过与主控板的串口通信实现语音的输入和输出,通过语音合成芯片将文字转化为语音,并通过扬声器播放出来㊂模块硬件设计:该模块主要由语音合成芯片㊁串口通信模块和扬声器3部分组成㊂语音合成芯片:该模块选用成本较低且功能较为完善的语音合成芯片,如DFRobot的DFPlayer Mini 或是AI芯片,如讯飞等㊂串口通信模块:该模块选用常用的串口通信模块,如HC-05或ESP8266等,与主控板进行串口通信㊂扬声器:该模块选用带有放大器功能的小型扬声器,通过语音合成芯片进行播放㊂模块软件设计:该模块的软件设计主要包括语音合成程序和串口通信程序㊂语音合成程序:开发者在主控板上编写语音合成程序,通过串口接收文字信息,将其转换为语音播放出来㊂语音合成程序可以使用开源的语音合成库或是自行编写㊂串口通信程序:开发者在主控板上编写串口通信程序,通过与语音播报模块进行串口通信实现语音输入和输出㊂串口通信程序可以使用Arduino的Serial 库或是自行编写㊂(2)方案二㊂其他部件与方案一相同,区别在于将语音识别直接和语音播报相连,不经过单片机,直接把语音识别的输出接在语音播报上㊂在数字电路中,逻辑电平是用来表示数字信号的一种方式㊂在通信过程中,发送方通过改变数字信号的逻辑电平来传输数据㊂接收方通过对数字信号的逻辑电平进行解码来还原原始数据㊂如果发送方和接收方采用相同的数字编码格式,并且使用相同的逻辑电平来表示不同的数字位,则接收方可以正确地解码数据,并还原原始的数据信息㊂因此,只要发送方和接收方之间存在着相同的逻辑电平,就可以进行通信㊂在该系统中,语音识别和语音播报都是3.3V的逻辑电平,两者正好可以通信,而单片机是5V的逻辑电平,需要串口通信模块才能实现㊂相较于方案一,方案二具有更便捷㊁易操作的特点,本文最终采用方案二㊂在内容方面包含呼叫名字唤醒以及歌曲/喜剧/小说播放功能㊂通过该语音播报模块的设计,机器人可以实现语音提示和交互功能,为用户提供更加智能化的使用体验㊂2.4㊀可燃气报警模块㊀㊀为了增强智能伴老机器人的安全性能,系统需要设计一个可燃气报警模块,用于检测机器人所在环境中是否存在可燃气体,并及时发出警报提示㊂硬件设计:该模块主要由可燃气体传感器㊁报警器和单片机3部分组成㊂可燃气体传感器:该模块采用灵敏度较高的MQ-5可燃气体传感器,可以快速检测到环境中的可燃气体㊂报警器:该模块采用高亮度LED与蜂鸣器作为报警器㊂通过该可燃气体报警模块可以提高伴老机器人的安全性能,机器人可及时检测出环境中的可燃气体并发出警报提示,为用户提供更加安全㊁放心的使用体验㊂2.5㊀系统方案框架㊀㊀基于以上方案论证,本系统最终由按键模块㊁红外循迹模块㊁语音识别㊁播报模块以及可燃气传感㊁报警模块组成㊂在系统中,机器人可以实现自主避障㊁检测室内环境中的可燃气体并报警,识别语音并作出相应的语音答复或者程序反应㊂系统原理如图1所示㊂图1㊀系统原理3 系统硬件设计3.1㊀驱动马达设计㊀㊀本系统采用的是MX1508双路有刷直流马达驱动电路,该型号电路采用的是H桥电路结构设计,其高可靠性功率管工艺马达特别适合驱动线圈㊁马达等感性负载㊂电路内部集成N沟道和P沟道功率MOSFET,工作电压范围覆盖2~9.6V㊂在27ħ㊁VDD为6.5V时,两个通道同时工作的条件下,2通道最大持续输出电流达到0.8A,最大峰值输出电流达到1.5A[2];1通道最大持续输出电流达到1.5A,最大峰值输出电流达到2.5A㊂该电机驱动电路为具备一定内阻的功率器件,电路的发热与负载电流㊁功率管导通内阻以及环境温度密切相关㊂电路设计包含芯片级温度检测电路,可以实时监控芯片内部发热㊂当芯片内部温度超过设定值150ħ时,功率管就会产生关断信号,关闭负载电流,避免因异常使用导致的温度持续升高,进而造成塑料封装冒烟㊁起火等严重安全事故,非常契合以安全性为重要因素的伴老机器人系统㊂另外,芯片内置的温度迟滞电路将确保电路恢复到安全温度后,才允许重新对功率管进行控制㊂电动机驱动电路如图2所示㊂图2㊀电动机驱动电路3.2㊀红外线避障设计㊀㊀系统选用的TCRT5000模块具有紧凑的结构,模块使用排列在同一侧的发射光源和检测器㊂其中,发射光源使用来自物体反射的波长为950mm的红外光束检测物体的存在,而检测器由光电晶体管组成㊂接好VCC(3.3~5V)和GND接口后,模块电源指示灯亮起㊂对于TCRT5000传感器的红外发射二极管,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;当被检测物体出现在检测范围内时就会把红外线反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮[3]㊂DO输出接口可以与单片机IO口直接相连㊂模拟输出AO,当发射管的红外信号经反射被接收管接收后,接收管的电阻会发生变化,在电路上一般以电压变化的形式体现出来,经过转换或LM324等电路整形后得到输出结果㊂电阻的变化取决于接收管所接收的红外信号强度,常表现在反射面的颜色(反射率)㊁形状和反射面接收管的距离等方面㊂另外,红外传感的灵敏度也可以自行调整,使模型根据需求在某一特定距离发挥避障功能㊂该红外传感器自带检测距离调节器,使用者需要改变灵敏度时,只需要操作调节器的旋钮㊂该调节器可以调节传感器的检测距离,对于白色的物体,反射的最远距离最大;黑色物体,反射的最远距离最小㊂面积大的物体所能探测的距离大;面积小的物体所能探测的距离小㊂红外传感器最短检测距离为2cm,最长检测距离可以达到20cm,工作电压较低,同时可以检测偏移角为40ʎ的物体㊂当传感器模块检测到障碍物或者有物㊀㊀体靠近时,其模块的绿色灯会亮起,同时OUT引脚会变低电平㊂模块是非接触式传感器,具有响应快㊁精度高等特点㊂避障传感器模块电路如图3所示,按键电路如图4所示㊂图3㊀避障传感器模块电路图4㊀按键电路3.3㊀语音交流设计㊀㊀SU-03T是一款低成本㊁低功耗㊁小体积的离线语音识别模组,32bit RISC内核,运行频率240M;支持DSP指令集以及FPU浮点运算单元,内置5V转3.3V㊂语音识别模块电路如图5所示㊂图5㊀语音识别模块电路㊀㊀DY-SV17F是一款智能语音模块,集成IO分段触发㊁UART串口控制㊁ONE_line单总线串口控制㊁标准MP3等7种工作模式;板载5WD类功放,可直接驱动4Ω㊁3~5W的喇叭;支持MP3㊁WAV解码格式,板载32Mbit(4MByte)flash存储,可通过USB数据线连接电脑更新音频文件[4]㊂语言识别模块实物与电路如图6与图7所示㊂语音识别和语音播报都是3.3V的逻辑电平,两者正好可以通信㊂电平转换电路如图8所示㊂电平触发模式(电平不释放):触发指定曲目,循环播放指定曲目,直至电平释放;播放中途释放电平,即刻停止播放;若有其他电平触发,则播放新曲目,有新的组合或按键播放新曲目㊂3.4㊀可燃气报警设计㊀㊀MQ-5气体传感器可检测多种可燃性气体,特别是液化气(即丙烷),对丁烷㊁丙烷㊁甲烷等可燃性气体灵敏度高,是一款适合于多种应用场景的气体传感器㊂它在较宽的浓度范围内对可燃气体(特别是丙烷)均有良好的灵敏度,具有寿命长㊁成本低㊁电路原理简单等优点[5]㊂MQ-5气体传感器所使用的气敏材料是在清洁空气中电导率较低的二氧化锡(SnO2)㊂当传感器所处环境中存在可燃气体时,传感器的电导率随空气中可燃气体浓度的增加而增大㊂使用简单的电路即可将电导率的变化转换为与该气体浓度相对应的输出信号[6]㊂单片机采集到数字信号后进行内部数据处㊀㊀图6㊀语音识别模块实物图7㊀语音识别模块电路图8㊀模块通信电路理,如可燃气体浓度达到报警器设置的临界点时,单片机将给蜂鸣器下达指令发出报警信号,使用者可以尽早感知到危险,避免酿成悲剧㊂实物与电路如图9与图10所示㊂3.5㊀电池部分设计㊀㊀TP4056是一款完整的单节锂离子电池,采用恒定电流㊁恒定电压的线性充电器㊂SOP8/MSOP8封装底部带有散热片,加上较少的外部元件数目[7],使得图9㊀MQ -5气体传感器实物图10㊀MQ -5气体传感器电路TP4056可以适用于USB 电源和适配器电源,成为便携式应用的理想选择㊂因为采用了内部PMOSFET 架构,加上防倒充电路,所以不需要增设外部隔离二极管㊂热反馈可对充电电流进行自动调节,以便在大功率操作或高温环境条件下对芯片温度加以限制㊂充电电压固定为4.2V,而充电电流可通过一个电阻器进行外部设置㊂在达到最终浮充电压之后,充电电流降至设定值的1/10时,TP4056将自动终止充电循环㊂当输入电压(交流适配器或USB 电源)被去掉时,TP4056自动进入一个低电流状态,将电池漏电流降至2μA 以下㊂TP4056在有电源时也可置于停机模式,进而将供电电流降至55μA㊂TP4056的其他特点包括电池温度检测㊁欠压闭锁㊁自动再充电,还包含2个用于指示充电或充电结束的LED 状态引脚[8]㊂电池电路如图11所示㊂图11㊀电池电路4㊀系统软件设计4.1㊀马达驱动设计㊀㊀在本系统中,模型的行动全部依赖于马达驱动,因此,此模块是相当重要的部分㊂马达驱动的工作流程大致为:在机器人工作开启后驱动初始化,检测到按键的按下状态则开始行动,再次按下则停止行动㊂4.2㊀红外避障设计㊀㊀红外避障模块是在马达驱动的基础上增加了红外感应的功能㊂首先对模块初始化,接着由传感模块的红外发射二极管不断发射红外线,当发射的红外线没有被反射回来或者被反射回来但强度不够大时,光敏电三极管一直处于关断的状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态,同时,模型也会一直匀速前进;直到在检测范围内检测到物体,二极管发出的红外线被反射回来且强度够大,光敏三极管达到饱和,此时模块输出端为高电平,指示二极管被点亮[9],同时给模型下达指令,命令模型后退一段距离并转向继续移动㊂4.3㊀可燃气报警㊀㊀MQ5可燃气报警模块的工作原理相对其他几个模块比较简单,在系统开机初始化后即开始自动检测空气中是否有可燃气体,如果检测到有,则转化为电信号告知主控制器,同时打开应急灯和蜂鸣器进行报警处理,直到按下复位键后停止报警㊂4.4㊀语音识别播报㊀㊀语音互动部分的代码文件使用智能公元协助生成㊂首先对系统需要实现的功能进行分析㊂前端信号处理方面选择单MIC 以及远场识别,因为模型本身并无严重噪声所以无需选择稳态降噪㊂然后由开发者配置唤醒词和命令词㊂因为该系统主要是针对老年人用户设计的,所以系统添加了一些戏曲及小说的播报等额外功能㊂语音控制内容的关键词㊁PIN 脚配置与电平情况如表1所示㊂表1㊀语音识别配置触发关键词对应PIN 脚电平参数小狗小狗/小智小智GPIO_A25高电平播放音乐/播放戏曲GPIO_A26低电平GPIO_A27高电平GPIO_A25高电平听小说/讲故事/听书GPIO_A26高电平GPIO_A27低电平GPIO_A25高电平关闭/关闭音乐/关闭小说GPIO_A26低电平GPIO_A27低电平GPIO_A25高电平㊀㊀系统收到对应指令后语音回复情况如表2所示㊂系统添加机器人唤醒以及关闭的控制行为,占空比均设为0㊂表2㊀语音控制关键词命令词系统的语音播报内容增加音量已是最大音量降低音量已是最小音量呼叫1我在呼叫2你说关闭有需要再叫我启动时的自动播报您好,欢迎使用伴老机器人㊀㊀系统在完成开关机控制行为的添加之后,挑选戏曲及小说的音频㊂戏曲选用了经典戏曲串烧,小说选用了‘红楼梦“的有声书节选㊂系统还添加了小说和戏剧音乐的音频,生成代码和烧录文件㊂5 结语㊀㊀本设计采用STC89C52RC作为主控芯片,在硬件设计上,采用TCRT5000传感器实现机器人的红外避障;采用SU-03T离线语音识别模组和DY-SV17F智能语音模块相结合实现机器人与使用者的语音交互,提供了更加智能且人性化的使用体验;采用MQ5可燃气传感器和蜂鸣器组合成可燃气报警器,提高居住安全性;采用MX1508型号双路有刷直流电动机驱动电路作为小车的动力驱动,采用TP4056型号单节锂离子电池为系统供电㊂本文所述智能伴老机器人具有精度高㊁易操作㊁外形轻巧㊁音量大等特点,贴合目标群体的使用习惯㊂智能伴老机器人的出现,为解决老年人生活中的各种问题提供了一种新的思路和㊀㊀手段㊂参考文献[1]陈慕君,邹珺,罗锋华.挖掘机器人自动控制系统设计[J].机床电器,2011(5):38-39,44.[2]曹盛林.基于单片机的足球机器人设计[J].南方农机,2020(6):123.[3]彭美定,邓鹏.基于单片机的智能红外避障小车设计[J].无线互联科技,2017(3):74-76,104. [4]陈浩,王军民.基于Arduino的测距和倾角平衡警报系统在桥梁裂缝检测中的应用[J].科技风,2019 (28):185,191.[5]余华芳,杨龙友,麦志华,等.智能听障助理系统的设计与实现[J].现代电子技术,2012(13):108-110. [6]张欢.楼宇卫士智能服务监测机器人[J].物联网技术,2019(4):5-10.[7]朱玉杰,王妃,吴茹,等.蓝牙追踪器[J].中国新通信,2019(5):118.[8]韩靖卜,周晓华,张欣宇.便携式紫外线消毒杀菌牙套盒[J].电子制作,2023(13):87-91.[9]汪光辉,朱晨昊,周正飞,等.一种智能红外避障自动扫地机器人的设计[J].集成电路应用,2019 (6):78-79.(编辑㊀何㊀琳)Design of intelligent companion robot control systemYu Lixin1 2Zhu Yan11.Wuxi Taihu University Wuxi214063 China2.Nanjing University of Information Science&Technology Nanjing210000 ChinaAbstract Modern society is facing the problem of global population aging intelligent elderly care robots as a new type of assistive living robot can provide diversified services for the elderly.The paper designs an intelligent elderly care robot control system based on the51microcontroller.In terms of hardware design the system uses TCRT5000sensors to achieve infrared obstacle avoidance combines SU-03T offline speech recognition module with DY-SV17F intelligent speech module to achieve voice interaction with users combines MQ5combustible gas sensor and buzzer to form combustible gas alarm uses MX1508dual path brushed DC motor drive circuit as the power drive of the car and uses TP4056single lithium-ion battery to power the system.This intelligent elderly care robot has the characteristics of high precision easy operation lightweight appearance and large volume which is suitable for the usage habits of the target group.Key words intelligent elderly care robot 51microcontroller infrared obstacle avoidance gas sensor speech recognition。
医疗机器人的远程控制与操作系统设计
医疗机器人的远程控制与操作系统设计随着科技的不断进步,医疗机器人在医疗领域的应用越来越广泛。
远程控制与操作系统设计对于医疗机器人的运行和管理起着重要作用。
本文将分析医疗机器人远程控制与操作系统设计的关键问题,并提出解决方案。
一、医疗机器人的远程控制问题在远程控制医疗机器人时,我们面临的主要问题有以下几个方面:1.连接稳定性:医疗机器人需要通过网络连接实现远程控制。
由于网络可能存在不稳定性,会导致控制信号传输中断或延迟,从而影响医疗机器人的操作效果。
2.实时性要求:一些医疗操作需要实时性高的控制信号,例如手术中的精确切割。
远程控制系统需要能够提供低延迟、高实时性的控制信号。
3.安全性保障:医疗机器人的远程控制涉及到患者的生命安全,因此需要确保控制信号的安全性,并防止非法入侵。
二、医疗机器人的远程控制系统设计方案为了解决上述问题,可以采取以下几个方面的设计方案:1.网络稳定性保障:在医疗机器人的远程控制系统中,可以采用冗余网络连接,通过同时连接多个网络来提高网络的稳定性。
同时,可以设计网络检测机制,定时检测各个网络的连接状况,及时切换到稳定的网络连接。
2.实时性保障:为了满足医疗机器人的实时控制需求,可以在网络传输层进行优化。
例如,采用实时传输协议(RTP)来提供低延迟、高实时性的控制信号传输。
此外,还可以在远程控制系统中加入缓冲区和数据预测算法,预测下一步的控制指令,从而减少传输延迟。
3.安全性保障:为了保障医疗机器人的远程控制系统安全,可以采用加密技术对控制信号进行加密传输,防止非法入侵和信息泄露。
同时,还可以设置权限控制机制,只允许授权用户进行远程控制操作。
三、医疗机器人的操作系统设计方案1.实时性要求:医疗机器人的操作系统需要提供高实时性的响应,以保证医疗操作的准确性。
因此,可以采用实时操作系统(RTOS)来设计医疗机器人的操作系统,提供高实时性的任务调度和处理机制。
2.多任务管理:医疗机器人通常需要同时执行多个任务,如图像处理、运动控制等。
关注空巢老人自助医疗护理器械产品设计
关注空巢老人自助医疗护理器械产品设计1 关注空巢老人自助医疗护理器械产品设计摘要:随着 21 世纪的到来,我国人口老龄化的速度加快,空巢老人现象也日益加剧,如何解决空巢老人的护理问题已经成为社会的焦点。
现如今,传统家庭养老的功能已经日益弱化,虽然空巢老人对医疗卫生服务的需求不断增加,但是医疗护理器械尤其是自助医疗护理在国内发展相对滞后,远远不能够满足空巢老人对医疗护理的需求。
因此,积极探索新形势下发展空巢老人自助医疗器械的新途径、新办法,已势在必行。
关键词:空巢老人护理器械自助医疗当与子女分开之后,面对空荡的房间和漫长的独独居生活,空巢老人在身心健康方面会受到一定的影响,在此情况下,会产生各种心理反应。
与此同时,空巢老人也面临着身体状况越来越差、患病率越来越高、行为不便等问题。
例如,高血压病、糖尿病、心脏病等都是老年人的常见病,这些疾病一旦形成,则很难治愈,而且常伴有不可逆的并发症,需要终生治疗及护理,既损害老年人的躯体健康,又影响了老年人的日常生活活动能力。
现代社会,居家养老已经成为一种趋势,虽然现阶段老年人的家庭医疗护理方面较过去有了一定的改善,但是对于许多的空巢老1/ 8人而言,现阶段的医疗护理水平仍然不能满足2 他们的需求,因此,解决老年人尤其是空巢老人在自助医疗护理方面中面临的问题将会是未来阶段的研究重点。
所谓自助医疗器械,就是使用者在不借助他人的情况下,仅仅依靠使用者本人一个人的力量,并在可操控范围之内便可完成治疗动作的医疗器械称之为自助医疗器械。
空巢老人除了具有与一般老年人的共性外,由于其不与家庭和成员或是相关护理人员居住,因此,在产品设计方面应该区别于普通老年人。
一、现阶段空巢老人家庭医疗护理器械的发展现状近年来,随着医疗器械的不断发展,家庭医疗护理器械的种类也在日益更新。
老年人的数量急剧增加,导致市场需求不断扩大。
政府和企业对这个特殊群体需求的关注也在的日益增长。
即使如此,现阶段空巢老人产品市场发展仍面临着诸多的问题。
空巢老人陪伴型机器人设计
2019.18科学技术创新1概述根据国家统计局数据显示,截止到2017年,中国60周岁及以上老年人口共计2.408亿;预计到2025年,这一人口数量将达到4亿,我国将成为世界上老年人占比最大的国家。
人口老龄化日益严重,空巢老人所占比重迅速攀升,一系列的社会问题亟待解决。
空巢老人由于没有亲人的陪伴,长期处于孤独的状态,从而引发一系列的生理、心理问题,如身体健康状况得不到重视,产生焦虑、抑郁心理疾病,所以给予空巢老人应有的关怀与陪伴已经刻不容缓。
日本作为目前世界上人口老龄化比较严重的国家,投入了大量的人力物力致力于老人陪伴机器人的研究,并且在近几年也取得了一些成果。
如图1所示:日本高校科研机构历时数年所研发的“TWENDY-ONE ”机器人,这款机器人可以辅助老人起床,并且可以自主行走,自行判断,避开障碍物;日本索尼公司在近几年推出的新一代机器人狗“爱宝”,该机器人可以感知外界的距离,并且具有发声和处理声音的功能,与其他陪伴型机器人不同,它的主要功能变成了娱乐;松下电器推出的老人陪伴机器人“泰迪”可以实现与老人的连续沟通;欧姆龙公司推出的机器人“尼克罗”采用人工毛皮,集成传感和人工智能技术,可以对主人表达自己的感受。
图1c.将底板通过仿真器与PC 机连接,可以通过CCS6界面显示出气压、海拔等信息。
结束语本文基于OMAPL138为处理器的ARM/DSP 双核架构,实现对GPS 和INS 信号的接收及处理,从而设计了GPS/INS 组合定位系统,实时显示当前位置的经纬度,气压等信息。
参考文献[1]赵胜林.一种GPS 导航定位仪设计与应用研究[D].哈尔滨:哈尔滨工业大学,2005.[2]马宏阳,程鹏飞,黄华东.GPS/INS 位置、速度和姿态全组合导航系统研究[J].测绘通报,2016(3):10-14.[3]Xue Y,Liu C,Chen Y,et al.Design and Realization of In -ertial Attitude Determination System Based on OMAPL138and FPGA[J].Computer Measurement &Control,2017.[4]赖贵川,黄华伟.基于MS5611-01BA01的高精度气压和温度检测系统设计[J].四川理工学院学报(自科版),2012,25(5):33-36.[5]朱阳,王伟成,王民慧.基于MPU9150的四轴飞行器姿态控制系统设计[J].制造业自动化,2015(10):46-48.作者简介:唐立伟(1975-),男,研究方向:工业控制。
一种远程医疗陪护机器人控制系统的总体设计
一种远程医疗陪护机器人控制系统的总体设计高敏;周仁和【期刊名称】《自动化与仪表》【年(卷),期】2012(27)12【摘要】In order to solve the chaperone service and medical problems of empty nesters.we have researched to design a remote control system based on Freescale MC9S12XS128 singlechip and VB epistatic machine,and on this basis to develop the principle prototype of home medical chaperonage robot -"Little Boy". The control system wasrncomposed by four subsystems:telecommunication system,intelligent voice system,visual information acquisition system, medical service system,which can not only help the old men do the basic grab and so on,but also can realize intelligent speech recognition,dialogue,audio and video remote real-time transmission.This platform can carry a variety of medical apparatus and instruments,such as non-contact thermometer,pulse blood pressure measuring instrument etc. The experimental results show that the design has actual application value,and lay the foundation for the research of network remote control of domestic medical robot%为解决空巢老人的陪护及医疗问题,研究设计出基于飞思卡尔单片机MC9S12XS128和VB上位机的远程控制系统,并在此基础上开发出家用医疗陪护机器人原理样机——“Little Boy”.“Little Boy”的控制系统由远程通信系统、智能语音系统、视觉信息采集系统、医疗服务系统四个子系统构成,可以帮助老人做基本的抓取等动作,同时还可实现智能语音识别、对话、音视频的远程实时传输.在此平台上可搭载多种医疗器械,如非接触式体温计、脉搏血压测量仪等等.实验结果表明,该设计具有一定的实际应用价值,并为研究网络远程控制的家用医疗机器人奠定了基础.【总页数】4页(P38-41)【作者】高敏;周仁和【作者单位】淮阴工学院设计艺术学院,淮安223001;淮阴工学院机械工程学院,淮安223001【正文语种】中文【中图分类】TP273【相关文献】1.远程医疗陪护视觉图像监控仿真研究 [J], 董莎莉2.一种跨平台的机器人网络远程控制系统 [J], 刘轶;范宜洋;张晗3.一种VR远程医疗服务机器人 [J], 张可征; 方武; 李晨曦; 宋志强4.一种隧道机器人行走远程控制系统 [J], 邓维迪;朱宏辉5.JJR-1型机器人控制系统的总体设计 [J], 杨萍;杨锋因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年助老服务机器人系统设计及软件架构》范文
《助老服务机器人系统设计及软件架构》篇一一、引言随着人口老龄化趋势的加剧,老年人的生活需求与健康管理成为了社会关注的焦点。
为了更好地满足老年人的生活需求,提高他们的生活质量,助老服务机器人系统的设计与开发显得尤为重要。
本文将详细探讨助老服务机器人系统的设计理念、功能模块以及软件架构,以期为相关研发工作提供有益的参考。
二、系统设计目标助老服务机器人系统的设计目标主要包括以下几个方面:1. 提高老年人的生活质量:通过提供日常生活协助、健康监测、娱乐互动等功能,降低老年人的生活压力,提高其生活质量。
2. 保障老年人的安全:通过实时监测老年人的生活环境,及时发现潜在的安全隐患,提供紧急救援服务。
3. 方便家庭照护者:为家庭照护者提供远程监控、信息反馈等功能,减轻其照护压力。
三、功能模块设计助老服务机器人系统主要包括以下几个功能模块:1. 日常生活协助模块:包括饮食起居、清洁卫生、购物取物等功能,帮助老年人完成日常生活中的各种任务。
2. 健康监测模块:通过智能设备监测老年人的生理指标,如血压、血糖、心率等,及时发现异常情况并提醒照护者或医生。
3. 娱乐互动模块:提供音乐、电影、游戏等娱乐内容,丰富老年人的精神生活,提高其生活质量。
4. 远程照护模块:为家庭照护者提供远程监控、信息反馈等功能,方便其了解老年人的生活状况。
四、软件架构设计助老服务机器人系统的软件架构设计应具备高可扩展性、高可用性和高安全性等特点。
具体设计如下:1. 硬件层:包括传感器、执行器、通信模块等硬件设备,负责采集数据、执行指令以及与云平台进行通信。
2. 数据处理层:负责对采集到的数据进行预处理、存储和分析,为上层应用提供数据支持。
3. 业务逻辑层:根据用户需求,实现各种业务逻辑处理,如日常生活协助、健康监测、娱乐互动等。
4. 用户交互层:提供友好的用户界面,方便用户与系统进行交互。
5. 云平台层:实现数据存储、计算、分析等功能,为多个机器人提供数据支持和服务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种用于空巢老人陪护的远程医疗服务机器人设计——软件及控制系统设计邓陈凯(淮阴工学院)摘要:本文以淮阴工学院2013级毕业设计为背景,介绍了助老机器人的控制系统的软硬件结构和开发流程。
该机器人主要机架由周义强同学设计制作,以Freescale半导体公司生产的MC9S12XS128为核心控制器,在CodeWarrior 5.1 开发环境中进行软件开发。
整个系统涉及机械结构调整、传感器电路设计及信号处理、控制算法和策略优化等多个方面。
为了提高助老机器人的行驶速度和可靠性,对比了不同方案的优缺点,并结合PC调试平台进行了大量底层和上层测试,最终确定了现有的系统结构和各项控制参数。
关键词::Freescale 助老机器人摄像头 PID控制1 助老机器人设计制作思路及技术方案概要说明1.1 助老机器人整体框架助老机器人是在车模结构的框架上,搭上硬件结构,通过单片机的处理能力,将传感器采集到的信息处理分析后得出运算结果,指挥电机和舵机做出适应实际需求的一套系统。
其硬件结构框架如下图:图1.1 硬件结构框架示意图1.2 周围环境检测周围环境的检测是机身控制的基础,为了提高行驶的稳定性和优化行车线路,很多设计都把重点放在使传感器感知更远的距离上、获取更多的信息。
现在我们采用的为摄像头方案,这种方案获取的赛道信息丰富,但电路设计和软件处理较复杂,且信息更新速度较慢。
一方面,摄像头所能检测的路况信息远多于“线型检测阵列”所能检测的信息,有利于区分各种道路类型;另一方面,摄像头检测范围调整灵活,可以提供足够远的预判距离。
实际上,通过“超频”和提高代码效率,并选择合适的图像处理算法,使用比赛规定的单片机完全可以对低线数黑白摄像头的视频信号进行采样和处理,有效识别出路况信息。
1.3 机身控制助老机器人应根据前方道路类型和当前机身的位置误差及速度,对舵机转角和驱动电机PWM 波的占空比进行及时调整。
关于这方面的控制方案有PID 控制、Bang-Bang 控制和模糊控制等。
电机速度闭环控制使用PID 控制。
2 控制电路设计说明硬件组成:主板、驱动板、摄像头、旋转编码器、伺服电机和直流电动机2.1 主板主板集成了机器人控制的所有电路,稳定性很重要。
2.1.1 CPU 选型我们选用了FreescaleMC9S12XS128 作为微控制器,前期考察了MC9S12XS128,以下简称S12。
S12 是一款常用的16 位MCU,有丰富的片内资源,其资料丰富。
S12 的片内RAM 为8KB,能基本满足摄像头图像采集时保存多个帧缓冲区的需要;S12 的最高CPU 总线频率为40MHz,可以将其超频至80MHz 甚至更高进行使用,然而这是以牺牲稳定性为代价的。
采用中断进行软件计数会消耗大约10%的CPU 资源;采用外部计数电路会导致电路臃肿,体积膨胀;采用时分复用计数端口的思路则会牺牲速度测量的准确性。
此外,S12 不具有外部总线,为了对摄像头信号进行采集,只能使用片内的AD 转换器,其转换速率较低,导致图像每行的点数不能满足需求。
如果需要输入片外数字信号,则有两种思路:使用同步信号和不使用同步信号。
使用同步信号会造成速度过慢的问题,不使用同步信号则需要将指令周期与收到数据的周期进行精确的对齐,稍有差错就会采集到无效的数据。
图2.1.1 核心板实物2.1.2 电源模块设计电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。
机器人系统中接受供电的部分包括:传感器模块、单片机模块、电机驱动模块、伺服电机模块等。
设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。
可靠的电源方案是整个硬件电路稳定可靠运行的基础。
机器人全部硬件电路的电源由7.2V,2A/h 的可充电镍镉电池提供。
由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。
机器人所需电源如图2.1.2所示。
图2.1.2 电源整体原理图2.1.2 按钮和蜂鸣器图 2.1.4 按钮、蜂鸣器电路图2.1.3 外围接口主板需要和一些外部设备进行连接,因此需要留出一些接口。
由于这是一个私人使用的小系统,接口不需要遵循公共的标准,只要定义清晰、插拔方便、不容易混淆或反插即可。
需要留出的接口如下:一个JTAG 接口,14pin,用于连接JTAG、OSBDM 等烧写器对单片机进行编程。
一个带电源的SPI 接口,6pin,用于连接支持SPI 总线协议的外围设备。
一个带电源的SCI 接口,4pin,用于连接支持SCI 总线协议的外围设备。
一个带电源输入、2 路GPIO 及4 路PWM 信号输出的接口,10pin,用于连接电机驱动板,并从电机驱动板获取电源。
一个带电源和一路PWM 的接口,3pin,用于连接舵机。
2.2 驱动板单片机输出使用两种模拟电平来表示0 和1 的数字信号,然而输出电流很小,无法直接连接直流电动机之类的大电流器件,因此需要使用驱动电路。
为了能让直流电动机在四个象限内工作,需要使用H 桥电路。
为了缩短开发周期,我们使用了成熟的BTS7960B 芯片进行电机驱动。
一片BTS7960B 是一个半桥,使用两片BTS7960B 芯片组成一个H 桥驱动一个电机。
图2.2 BTS7960 功能示意图上图中两片BTS7960B 组成的电路有三路输入信号,分别对应使能和两个半桥。
我们将使能信号连接至S12的IO 口,半桥控制信号连接至S12的PWM 端口,通过调节输出PWM 信号的占空比来实现对电机力矩的控制,上层通过一个闭环反馈实现速度控制。
2.3 摄像头数字摄像头是一种数字视频的输入设备,利用光电技术采集影像,而不像视频采集卡那样首先用模拟的采集工具采集影像,再通过专用的模数转换组件完成影像的输入。
数字摄像头的优点是使用简单,输出即为数字信号。
模拟摄像头多为CCD 的,按不同档次分辨率不同。
与数字摄像头同级的模拟摄像头一般有较高的分辨率,较好的实时性。
主板上具有模拟视频输入接口,因此我们选择模拟摄像头。
经过一些比较,我们选择了一款模拟针孔CCD 摄像头。
图2.3 摄像头安装位置2.4 NRF24L01无线通信模块该射频模块集成了NORDIC 公司生产的无线射频芯片NRF24L01支持2.4GHz 的全球开放ISM 频段,最大发射功率为10dBm ,功耗低,等待模式时电流消耗为22uA 。
图2.4 无线通信模块示意图2.5 伺服电机舵机接受脉冲信号作为控制信号。
舵机每捕捉到一次脉冲,就根据脉冲的宽度,通过内置的闭环控制系统旋转到相应的位置。
脉冲之间的间隔不能太短,否则会导致舵机工作不正常,通常取10-20ms 。
我们都使用单片机的PWM 模块来控制舵机,使单片机输出一个50-100Hz 的PWM ,通过调节PWM 的占空比来实现舵机的控制。
我们选用辉盛M995型号的舵机,如图所示:2.6 直流电机选用的普通的直流减速电机。
3 控制软件设计说明3.1 系统片内资源MC9S12XS单片机是以CPU12的V2内核为核心的单片机系列。
最高总线速度从25MHz提高到了40MHz。
128KFlash,8K RAM,2K EEPROM、2个SCI,2个SPI、1个IIC、2个CAN、16路12位ADC、8路PWM、8路16位定时/计数器、一个16位秒冲累加器,支持单线BDM调试。
3.2 视频采集得到一段视频信号后,可以从中提取黑线位置,是否为起始线,这些信息可以被用于舵机和电机等执行器件进行控制。
采集到的图像分辨率为172*40,主要包含前景和背景两部分。
前景是指路线上的黑色部分,包括黑线和起始线。
背景指路线上未贴黑线的白色部分,以及道路外的其它部分。
将数字图像分为多个子区域被称为图像分割。
3.3 速度控制分层是解决系统复杂性的有效方法。
我们的速度控制算法分为顶层和底层,顶层负责根据传感器的信息给定一个速度,底层负责通过闭环反馈来进行速度控制。
3.3.1 顶层速度控制采用了简单的顶层速度控制算法,在采集到的图像中,如果前方没有障碍物,就给高速,否则就给低速。
低速设置为路况中转弯的极限速度,实际表明,采用这种方法进行速度分配,直行,转弯都能安全通行。
3.3.2 底层速度控制底层速度控制是采用的PID控制。
考虑到电机的非线性特征,在根据PID得出PWM值之后,进行了一个非线性的二次曲线转换。
加入转换后,在正反两个方向上,电机都能在确定的时间中转满方向。
3.4 舵机控制3.4.1 舵机顶层控制量选定机器人在运行过程中,需要用舵机来控制摄像头的转向,还有,需要通过舵机来控制机械手臂的上下运动。
所以舵机顶层控制量选用的是摄像头直面前方的位置,机械手的最上面的位置。
3.4.2 舵机顶层控制量修正对于机械手的上下运动,通过对顶层控制量的修正,来完成这几项任务。
参考文献1 Tinku Acharya 等. 数字图像处理——原理与应用.清华大学出版社,20072 龚路,王浩,黄炫圭. 第六届全国大学生“飞思卡尔”杯智能汽车竞赛上海交大SmartStar队技术报告[R].上海:上海交通大学,20113 李向南,饶建华,王冲等.宝石磨雕机器人软件控制系统的设计和实现[J].制造业自动化,2012(1)4 刘存桓.基于视觉信息的移动机器人非线性控制系统设计[D].山东大学,20125 党宏社,韩崇昭,段战胜. 智能车辆系统发展及其关键技术概述. 公路交通科技2002 年12 月Vol.19-No.69 周风余,田国会,郭丹,等. 助老助残服务机器人机载计算机软件系统设计及实现[N]. 山东大学学报( 工学版),2011(1).附录C程序代码void main(void){/* put your own code here */chaopin();pwm_init();SPI_Init();SciInit();需要使用药物Nrf24l01_init();RX_mode_init();PIT();DDRB=0XFF; //舵机接口DDRM=0XFF; //电机方向控制syn6288(text1,sizeof(text1));Delay1ms(500);syn6288(text2,sizeof(text2));Delay1ms(1000);EnableInterrupts;for(;;) {for(time=0;time<500;time++){status=Read_IRQ(&statusT,&statusR,&statusM) ; if(statusM) {Clr_IRQ();}if(statusT) {Clr_IRQ();}if(statusR) {Clr_IRQ();RxPacket();}fangxiang1=RxData[2];fangxiang2=RxData[3];jiaodu[0]=RxData[4];jiaodu[1]=RxData[5];//动作控制jiaodu[2]=RxData[6];jiaodu[3]=RxData[7];sudu=RxData[8]; //速度控制wenzi[0]=RxData[9];wenzi[1]=RxData[10];wenzi[2]=RxData[11];wenzi[3]=RxData[12];wenzi[4]=RxData[13];wenzi[5]=RxData[14];wenzi[6]=RxData[15];wenzi[7]=RxData[16];wenzi[8]=RxData[17];wenzi[9]=RxData[18];wenzi[10]=RxData[19];wenzi[11]=RxData[20];//接收文字wenzi[12]=RxData[21];wenzi[13]=RxData[22];wenzi[14]=RxData[23];wenzi[15]=RxData[24];wenzi[16]=RxData[25];wenzi[17]=RxData[26];wenzi[18]=RxData[27];wenzi[19]=RxData[28];// wenzi[20]=RxData[30];// wenzi[21]=RxData[31];}if(fangxiang1==1&&fangxiang2==1) {PTM_PTM0=1;PTM_PTM1=0;PTM_PTM2=1;PTM_PTM3=0;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==2&&fangxiang2==2) {PTM_PTM0=0;PTM_PTM1=1;PTM_PTM2=0;PTM_PTM3=1;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==1&&fangxiang2==2) {PTM_PTM0=0;PTM_PTM1=1;PTM_PTM2=1;PTM_PTM3=0;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==2&&fangxiang2==1) {PTM_PTM0=1;PTM_PTM1=0;PTM_PTM2=0;PTM_PTM3=1;PWMDTY01=sudu*10;PWMDTY23=sudu*10;}if(fangxiang1==0&&fangxiang2==0) {PTM_PTM0=1;PTM_PTM1=1;PTM_PTM2=1;PTM_PTM3=1;PWMDTY01=0;PWMDTY23=0;}if(wenzi[0]!=0){for(ycc=0;ycc<=21;ycc++){if(wenzi[ycc]!=0){// text[ycc]=wenzi[ycc];ymm=ymm+1;}else{break;}}syn6288(wenzi,ymm);Delay1ms(3000);ymm=0;}loop foreverplease make sure that you never leave main */ }附2图1.1 助老机器人实物图。