数字旋转编码开关的原理及使用方法
编码开关接法电路原理
编码开关接法电路原理
编码开关接法电路是一种常用的数字电路,用于将物理开关的信号转换为二进制或十进制编码的电信号。
它可以被广泛应用于电子设备中,如计算机、遥控器、数据输入设备等。
编码开关接法电路的原理是利用多个开关的组合来产生不同的编码输出。
它通常由多个开关、逻辑门和编码器组成。
在一个简单的例子中,我们使用一个四位二进制编码开关接法电路来说明其原理。
这个电路由四个开关和一个编码器组成。
首先,我们需要将每个开关与一个编码器的输入引脚连接起来。
开关可以用来控制二进制编码的高低电平。
在这个例子中,我们使用的是四位二进制编码,因此有四个开关。
编码器的作用是将输入的二进制编码转换为对应的输出信号。
在这个例子中,我们使用的是二-四线编码器。
它将四个输入信号转换为四个输出信号,即将二进制编码转换为对应的十进制数。
接下来,我们将编码器的输出线连接到其他电路或设备,以传递所选择的编码值。
这可以是一个 LED 灯、数码管显示器或其他需要编码信号的设备。
最后,连接电路的电源和参考地线,以供电和确保电路工作的稳定性。
当我们改变开关的位置时,开关的状态将改变,进而改变了二进制编码输入信号。
编码器将根据输入信号的变化,产生对应的输出信号,实现了将物理开关的位置转换为电信号的功能。
总结一下,编码开关接法电路原理是借助开关和编码器,将物理开关的状态转换为二进制编码或十进制编码的数字信号。
这种电路可以在各种数字电子设备中实现,提供了方便的数据输入和控制方式。
旋转式编码开关(飞梭)的工作原理
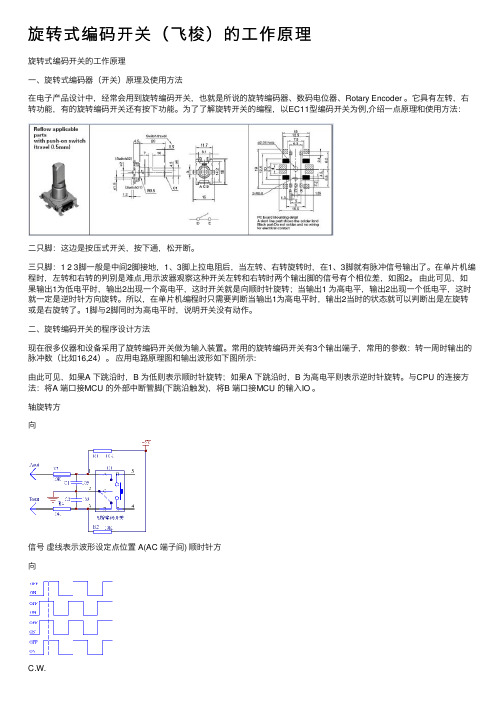
旋转式编码开关(飞梭)的⼯作原理旋转式编码开关的⼯作原理⼀、旋转式编码器(开关)原理及使⽤⽅法在电⼦产品设计中,经常会⽤到旋转编码开关,也就是所说的旋转编码器、数码电位器、Rotary Encoder 。
它具有左转,右转功能,有的旋转编码开关还有按下功能。
为了了解旋转开关的编程,以EC11型编码开关为例,介绍⼀点原理和使⽤⽅法:⼆只脚:这边是按压式开关,按下通,松开断。
三只脚:1 2 3脚⼀般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋转时,在1、3脚就有脉冲信号输出了。
在单⽚机编程时,左转和右转的判别是难点,⽤⽰波器观察这种开关左转和右转时两个输出脚的信号有个相位差,如图2。
由此可见,如果输出1为低电平时,输出2出现⼀个⾼电平,这时开关就是向顺时针旋转;当输出1 为⾼电平,输出2出现⼀个低电平,这时就⼀定是逆时针⽅向旋转。
所以,在单⽚机编程时只需要判断当输出1为⾼电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
1脚与2脚同时为⾼电平时,说明开关没有动作。
⼆、旋转编码开关的程序设计⽅法现在很多仪器和设备采⽤了旋转编码开关做为输⼊装置。
常⽤的旋转编码开关有3个输出端⼦,常⽤的参数:转⼀周时输出的脉冲数(⽐如16,24)。
应⽤电路原理图和输出波形如下图所⽰:由此可见,如果A 下跳沿时,B 为低则表⽰顺时针旋转;如果A 下跳沿时,B 为⾼电平则表⽰逆时针旋转。
与CPU 的连接⽅法:将A 端⼝接MCU 的外部中断管脚(下跳沿触发),将B 端⼝接MCU 的输⼊IO 。
轴旋转⽅向信号虚线表⽰波形设定点位置 A(AC 端⼦间) 顺时针⽅向C.W.B(BC 端⼦间) A(AC 端⼦间) 逆时针⽅向 C.C.WB(BC 端⼦间)。
旋转编码器和接近开关的工作原理
• 识别对象
•
根据载体上的码识别是与非。
• 信息传送
•
ASI(总线)连接设备上各个位置上的传感器在生产线(50-100
米)中的数据往返传送等。
2.旋转编码器
• 工作原理
• 旋转编码器是一种光电式旋转测量转速装置,它是将被测的角位移直 接转换成数字信号(高速脉冲信号)因此可将旋转编码器的输出脉冲 直接给PLC,利用PLC的高速计数器对其脉冲信号进行计数,以获得测 量结果。
• 有时被检测验物体是按一定的时间间隔,一个接一个地移向接近开关, 又一个一个地离开,这样不断地重复。不同的接近开关,对检测对象 的响应能力是不同的。这种响应特性被称为“响应频率”。
分:
• 无源接近开关 这种开关不需 要电源,通过磁力感应控制开 关的闭合状态。当磁 或者铁质 触发器靠近开关磁场时,和开 关内部磁力作用控制闭合。特 点:不需要电源,非接触式, 免维护,环保
接近开关的接线
• 1)接近开关有两线制和三线制之区别,三线制接近开关又分为NPN 型和PNP型,它们的接线是不同的。请见下图所示:
• 2)两线制接近开关的接线比较简单,接近开关与负载串联后接到电 源即可。
• 3)三线制接近开关的接线:红(棕)线接电源正端;蓝线接电源0V 端;黄(黑)线为信号,应接负载。负载的另一端是这样接的:对于 NPN型接近开关,应接到电源正端;对于PNP型接近开关,则应接到 电源0V端。
• 这样的方法对有些工控项目比较麻烦,甚至不允许开机找零(开机后 就要知道准确位置),于是就有了绝对编码器的出现。
• 绝对编码器由机械位置决定的每个位置的唯一性,它无需记忆,无需 找参考点,而且不用一直计数,什么时候需要知道位置,什么时候就 去读取它的位置。这样,编码器的抗干扰特性、数据的可靠性大大提 高了。
编码开关硬件防抖原理

编码开关硬件防抖原理编码开关是一种常见的开关类型,其工作原理是利用编码器和解码器实现开关状态的切换。
在使用编码开关的过程中,经常会遇到开关抖动的问题,这时需要使用硬件防抖技术进行处理。
编码开关的工作原理是通过旋转或摇杆操作产生信号,将信号传送给编码器。
编码器将信号转化为数字信号,然后传送给解码器,解码器将数字信号转化为二进制信号,通过开关控制电路实现开关状态的切换。
然而,在实际应用中,编码开关的操作可能会出现抖动现象,即开关状态在切换过程中,会出现多次短暂的状态变化。
这会对电路的工作带来影响,因此需要使用防抖技术消除开关抖动。
硬件防抖技术是一种基于电路设计的防抖方法。
它通过在编码开关的输入端增加电容器和电阻器等元器件,来增加开关的承受能力,并使开关状态切换过程中产生的抖动信号得到平滑处理,从而达到防抖的效果。
具体而言,硬件防抖技术可以通过以下两种方法来实现:1. RC网络防抖RC网络是一种基于电容器和电阻器组成的网络,可以在电路中产生滤波效果。
在编码开关输入端增加RC网络可以使其在切换时产生短暂的延迟,从而消除抖动信号。
2. Schmitt触发器防抖Schmitt触发器是一种门电路,可以将不稳定的输入信号转化为稳定的输出信号。
在编码开关输入端增加Schmitt触发器可以消除抖动信号,并将开关信号转化为数字信号,方便电路处理。
总之,编码开关是一种常见的开关类型,其工作原理是通过编码器和解码器实现开关状态的切换。
然而,在实际应用中,开关抖动会对电路工作产生影响,需要使用硬件防抖技术进行处理。
硬件防抖技术包括RC网络防抖和Schmitt触发器防抖两种方法,可以有效消除抖动信号,提高电路的稳定性。
编码器的工作原理及作用
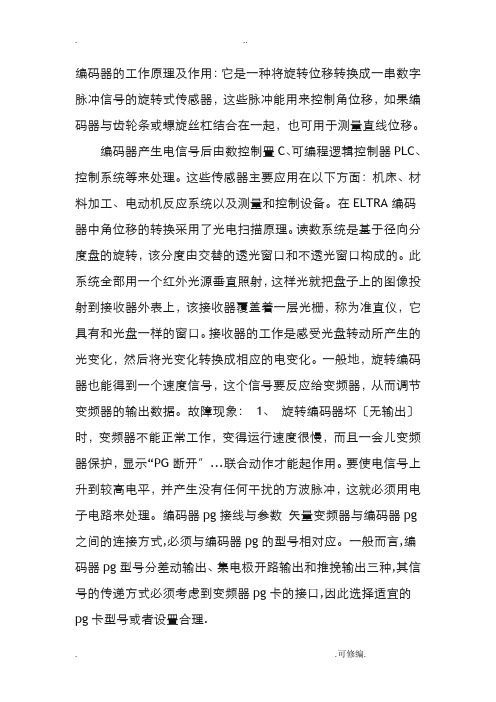
编码器的工作原理及作用:它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
编码器产生电信号后由数控制置C、可编程逻辑控制器PLC、控制系统等来处理。
这些传感器主要应用在以下方面:机床、材料加工、电动机反应系统以及测量和控制设备。
在ELTRA编码器中角位移的转换采用了光电扫描原理。
读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。
此系统全部用一个红外光源垂直照射,这样光就把盘子上的图像投射到接收器外表上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘一样的窗口。
接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。
一般地,旋转编码器也能得到一个速度信号,这个信号要反应给变频器,从而调节变频器的输出数据。
故障现象:1、旋转编码器坏〔无输出〕时,变频器不能正常工作,变得运行速度很慢,而且一会儿变频器保护,显示“PG断开〞...联合动作才能起作用。
要使电信号上升到较高电平,并产生没有任何干扰的方波脉冲,这就必须用电子电路来处理。
编码器pg接线与参数矢量变频器与编码器pg 之间的连接方式,必须与编码器pg的型号相对应。
一般而言,编码器pg型号分差动输出、集电极开路输出和推挽输出三种,其信号的传递方式必须考虑到变频器pg卡的接口,因此选择适宜的pg卡型号或者设置合理.编码器一般分为增量型与绝对型,它们存着最大的区别:在增量编码器的情况下,位置是从零位标记开场计算的脉冲数量确定的,而绝对型编码器的位置是由输出代码的读数确定的。
在一圈里,每个位置的输出代码的读数是唯一的;因此,当电源断开时,绝对型编码器并不与实际的位置别离。
如果电源再次接通,那么位置读数仍是当前的,有效的;不像增量编码器那样,必须去寻找零位标记。
现在编码器的厂家生产的系列都很全,一般都是专用的,如电梯专用型编码器、机床专用编码器、伺服电机专用型编码器等,并且编码器都是智能型的,有各种并行接口可以与其它设备通讯。
旋转编码器(音量旋钮)原理、ad接键原理
目的和意义
01
了解旋转编码器(音量旋钮)和AD 接键的工作原理有助于更好地理 解电子设备的工作机制,提高设 备的使用和维护效率。
02
掌握这些原理还有助于进行电子 设备的维修和改造,提高设备的 可靠性和稳定性。
02 旋转编码器(音量旋钮)原 理
旋转编码器概述
旋转编码器是一种光电转换装置,通过测量光束在旋转编码器圆盘上的透射和遮 挡,从而检测旋转角度或位置。
旋转编码器由光源、光敏元件、旋转编码盘、光电检测装置等组成,其中旋转编 码盘是关键部分,通常由玻璃、金属或塑料制成,上面刻有黑白相间的条纹。
旋转编码器的工作原理
当旋转编码器随着轴一起转动时,光束通过旋转编码盘上的 黑白条纹,产生交替的透射和遮挡,光敏元件接收到的光线 强度随之变化,从而输出相应的电信号。
我们详细分析了AD接键的工作机制,发现它是通过模拟信号和数字信号之间的转换来实现的。我们深 入研究了其电路设计、信号处理和性能优化等方面,并对其在实际应用中的表现进行了评估。
对未来研究的建议
进一步优化旋转编码器的性能 ,提高其稳定性和可靠性,以 满足更广泛的应用需求。
探索新型的编码器和接键技 术,以适应不断发展的电子 设备和智能化系统的需求。
视频处理
用于将模拟视频信号转换为数字视频 信号,以便进行数字视频处理、编辑 和录制。
04 旋转编码器与AD接键的 比较
工作原理的比较
旋转编码器
旋转编码器是一种旋转式位置传感器, 通过测量旋转角度来输出相应的电信号 。它通常由一个转轴和一个编码器组成 ,转轴与被测物体相连,编码器则将转 轴的旋转角度转换为电信号。
ABCD
对AD接键的电路设计进行改 进,以提高其信号质量和传输 速度,同时降低功耗和成本。
旋转编码器教学课件

---------------------------------------------------------------最新资料推荐------------------------------------------------------旋转编码器教学课件旋转编码器编辑锁定旋转编码器是用来测量转速并配合PWM 技术可以实现快速调速的装置,光电式旋转编码器通过光电转换,可将输出轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(REP)。
分为单路输出和双路输出两种。
技术参数主要有每转脉冲数(几十个到几千个都有),和供电电压等。
单路输出是指旋转编码器的输出是一组脉冲,而双路输出的旋转编码器输出两组 A/B 相位差 90 度的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
中文名旋转编码器外文名 Rotary Encoder 脉冲编码器SPC 绝对脉冲 APC 作用实现快速调速的装置齿轮组BESM58 目录 1. 1 基本简介 2. 2 形式分类 3. 3 工作原理 4.4 特点 1.5 信号输出 2.6 注意事项 3.7 原理特点 4.8 输出信号 1.9 常用术语 2. 10 安装事项 3. 11 应用旋转编码器基本简介编辑按信号的输出类型分为:电压输出、集电极开路输出、推拉互补输出和长线驱动输出。
旋转编码器形式分类编辑有轴型:有轴型又可分为夹紧法兰型、同步法兰型和伺服安装型等。
轴套型:1 / 15轴套型又可分为半空型、全空型和大口径型等。
器件图片(2 张) 以编码器工作原理可分为:光电式、磁电式和触点电刷式。
按码盘的刻孔方式不同分类编码器可分为增量式和绝对式两类。
增量式 BEN 编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。
绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
开关编码器工作原理

开关编码器工作原理
开关编码器是一种将机械开关位置转化为数字信号输出的设备。
它通常由一个旋转开关和一个或多个继电器组成。
开关编码器的工作原理如下:
1. 旋转开关:开关编码器通常使用旋转开关作为输入设备。
这个旋转开关可以有多个固定位置,每个位置对应一个不同的选项或状态。
2. 继电器:每个旋转开关位置对应一个继电器。
继电器是一种电子开关,可以根据输入信号的状态打开或关闭电路。
在开关编码器中,每个继电器通常与一个特定位置的旋转开关相关联。
3. 数字输出:当旋转开关转到特定位置时,相应的继电器将打开或关闭。
这样,就可以通过检测继电器状态来确定旋转开关的位置,并将其转换为数字信号输出。
每个旋转开关位置对应一个唯一的数字代码,可以用于处理和控制其他设备或系统。
4. 可编程性:开关编码器通常具有可编程功能,可以根据特定需求修改继电器的功能和输出。
这意味着可以灵活地配置开关编码器以适应不同的应用场景。
开关编码器主要用于机械开关位置转化为数字信号的场合,如电子设备控制、机器人控制、工业自动化等。
它的工作原理简单明了,可靠性高,被广泛应用于各种领域。
旋转编码开关工作原理

旋转编码开关工作原理
旋转编码开关是一种用于控制电子设备操作的开关。
它的工作原理基于两个主要组件:旋转机械部件和光电传感器。
1. 旋转机械部件:旋转编码开关通常由一个旋转轴和一个环形编码盘构成。
编码盘上刻有一系列等距的刻度线,用于指示旋转的位置。
2. 光电传感器:旋转编码开关内部还包含一个或多个光电传感器,用于检测编码盘上刻度线的变化。
光电传感器通常由一个发光二极管(LED)和一个光敏电阻(光敏二极管或光电二极管)组成。
工作原理如下:
1. 当用户旋转开关时,旋转轴会转动编码盘,导致刻度线的位置改变。
2. 光电传感器通过射出红外光(由LED产生)并通过光敏电阻(感测器)来检测光的反射情况。
当刻度线在光电传感器前方传过时,反射情况会改变。
3. 光敏电阻会将改变后的光信号转换为一个电压信号,该信号传递给电子设备的控制系统。
4. 控制系统会解读电压信号的变化,并相应地对电子设备进行操作,比如改变音量、切换菜单选项等。
通过不断检测刻度线的变化,旋转编码开关可以准确地控制电子设备的操作,提供更加直观和方便的用户体验。
编码器开关的原理和应用

编码器开关的原理和应用一、引言编码器开关是电子设备中常用的一种开关类型,它可以将机械运动转换为电信号,使得电子设备可以对运动进行检测和控制。
本文将介绍编码器开关的工作原理、分类以及在各个领域中的应用。
二、工作原理编码器开关的工作原理基于机械和电子的相互作用。
在编码器开关内部,通常有一个旋转轴和一系列的探测装置。
当旋转轴旋转时,探测装置会感知并转换成电信号,进而传输到设备系统中进行相应的操作。
三、分类根据编码器开关的工作原理和结构不同,可以将其分为以下几种常见类型:1.光电编码器开关:基于光电传感器的工作原理,使用光电传感器检测物体的运动,并将其转换成电信号。
广泛应用于工业自动化领域,例如机械臂控制、自动装配线等。
2.磁编码器开关:基于磁传感器的工作原理,使用磁传感器检测物体的磁场变化,并将其转换成电信号。
常见于磁性材料检测、位置测量等领域。
3.机械编码器开关:基于机械结构的工作原理,使用机械传感器检测物体的机械运动,并将其转换成电信号。
适用于机械控制、位置测量等场景。
四、应用编码器开关在各个领域中有着广泛的应用,以下列举几个常见的应用场景:1.工业自动化:在工业生产过程中,编码器开关可以用于检测和控制机械臂的运动,实现精确位置控制和运动规划。
2.机器人技术:编码器开关的高精度和快速响应特性,使其成为机器人技术中的关键组件。
通过编码器开关,机器人可以实现精确的位置感知和运动控制。
3.医疗设备:在医疗设备中,编码器开关常用于测量和控制医疗设备的各种参数,如血压计、血糖仪等,以确保精确的测量结果和可靠的控制功能。
4.交通运输:编码器开关可用于车辆的导航系统,实现位置信息的准确获取和导航指引,提高驾驶的安全性和效率。
5.智能家居:在智能家居中,编码器开关常用于控制家电设备的开关和调节,提供便捷的生活体验和舒适的居住环境。
五、总结编码器开关作为一种常见的开关类型,通过将机械运动转换为电信号,实现了对运动的检测和控制。
单片机操作旋转编码器

检查方向时,通常采用两种做法
(1)中断法:获取A或B的上升沿或下跳沿,在中断程序中,检测此时另外一相的电平。例如上图中,A相上跳沿,B相为低电平则为顺时针转动;B相为高电平二者为逆时针方向转动。
(2)电平法:同时检测A相和B相的电平,当出现A,B不相同时,则能判定发生了转动,根据前一时刻A相和B相的电平,则能判断出转动的方向。
同时检测相的电平当出现不相同时则能判定发生了转动根据前一时刻硬件电路本设计在pic16单片机上进行开发采用中断法
最近做了一个关于旋转编码器的项目,在网上查阅了很多资料,然后又是进行了诸多的实验,分享给大家。
1旋转编码器原理
(借用一下别的文档里的图片)
5脚的旋转编码开关具有左转,右转,按下三个功能。2脚接地,1,3脚接上拉电阻。
2硬件电路
本设计在PIC16单片机上进行开发,采用中断法。
旋转编码开关输出上拉,之后采用RC滤波器对信号进行先一步滤波,此处的RC滤波器的元器件大小可以适当调整。中断源采用的是捕捉模块(CCP2)的捕捉中断(外部中断用于别处)。
3 C代码
中断响应函数:
voidinterrupt ISR(void)
{
if(CCP2IF)
{
CCP2IF=0;
Change();
}//程序中CCP2设置成捕捉下跳沿
}
void Change()
{
unsigned int t2=2000;
if(RC3)//高电平
{
while((!RC1)&&(t2--))//等待RC1的低电平持续完
{
Delay();
}
if(!RC3)//判断此时RC3的电平,以确认转动发生
编码器开关原理

一、编码器(编码开关)原理及使用方法
旋转编码器、数码电位器、Rotary Encoder。
它具有左转,右转功能,有的旋转编码开关还有按下功能。
使用方法:EC11型编码开关为例:
三只脚:123脚一般是中间2脚接地,1、3脚上拉电阻后,当左转、右转旋转时,在1、3脚就有脉冲信号输出了。
两只脚:按压开关,按下时导通,回复时断开。
二、在单片机编程时,左转和右转的判别是难点,用示波器观察这种开关左转和右转时
两个输出脚的信号有个相位差.由此可见,如果输出1为高电平时,输出2出现一
个高电平,这时开关就是向顺时针旋转;当输出1为高电平,输出2出现一个低
电平,这时就一定是逆时针方向旋转。
所以,在单片机编程时只需要判断当输
出1为高电平时,输出2当时的状态就可以判断出是左旋转或是右旋转了。
旋转编码器工作原理

旋转编码器工作原理编码器如以信号原理来分,有增量型编码器,绝对型编码器。
一、增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。
编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。
分辨率:编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。
信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。
信号连接:编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。
单相联接,用于单方向计数,单方向测速。
A.B两相联接,用于正反向计数、判断正反向和测速。
A、B、Z三相联接,用于带参考位修正的位置测量。
A、A-,B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。
对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。
对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
8421旋转编码开关的工作原理

8421旋转编码开关的工作原理宝子们!今天咱们来唠唠这个超有趣的8421旋转编码开关呀。
你看这个8421旋转编码开关呢,就像是一个小小的魔法旋钮。
它的内部结构呀,就藏着好多小秘密呢。
这开关有好几个引脚,就像小脚丫一样伸出来,每个引脚都有它独特的使命哦。
咱先说说这个8421是啥意思吧。
这可不是什么神秘代码,其实它是一种编码方式啦。
就好比是给每个状态都取了个特别的名字。
想象一下,这就像给一群小动物按照一定的规则编号一样。
当我们开始转动这个旋转编码开关的时候呀,里面就像有个小齿轮在悄悄运作。
这个小齿轮每转一格,就会改变开关内部的电路连接情况呢。
比如说,它可能会让某两个引脚之间接通或者断开。
这就像是在搭积木,每转动一下,积木的组合方式就变了。
它的工作原理有点像一个超级聪明的小管家。
这个小管家知道不同的旋转方向代表着不同的指令。
如果我们顺时针转动,它就会按照8421的编码规则,给电路发送一种信号,就像是小管家在说:“电路朋友们,现在我们要这样变化啦。
”如果是逆时针转动呢,小管家又会发出另外一种信号,电路就得按照新的指示来工作啦。
你知道吗?这个旋转编码开关在好多地方都发挥着大作用呢。
在一些小电器上,像那种复古风格的收音机,我们转动这个开关就能调节频道。
就好像这个开关在和收音机里的其他零件说:“伙伴们,我们要去找下一个好听的电台啦。
”它每转动一下,收音机就能收到不同频率的广播,是不是很神奇呢?再说说在一些简单的电子小玩具上吧。
比如说那种可以变换灯光颜色或者闪烁模式的小灯球。
8421旋转编码开关在这儿就像是个色彩大师的魔法棒。
我们一转,它就告诉小灯球:“宝贝,现在我们要换成蓝色的光闪烁啦。
”或者“现在让灯光快速闪烁起来吧。
”这个开关还有个很贴心的地方呢。
它能够很精准地控制电路的变化。
不会像有些开关那样,要么全开,要么全关,很粗暴。
它就像是一个优雅的舞者,每一步都能精准地落在点上。
每一次转动,它带来的电路变化都是按照8421这个巧妙的编码来的,不多不少,刚刚好。
旋转编码开关原理

旋转编码开关原理
旋转编码开关是一种常用的电子开关,其原理基于旋转编码器的工作原理。
旋转编码器是一种能够检测旋转方向和旋转距离的设备,它通常由一个旋转轴、发光二极管或激光二极管等光学传感器组成。
当旋转编码器旋转时,它会发出逻辑电平脉冲,这些脉冲的数量和方向取决于旋转的距离和方向。
旋转编码开关通过检测和解码这些脉冲来确定开关的状态。
旋转编码开关通常具有多个位置,每个位置对应一个特定的电路连接。
通过旋转编码器可以改变开关的位置,从而改变电路的连接方式。
当旋转编码器旋转时,开关会在不同的位置之间切换,从而切换电路的功能或状态。
旋转编码开关的优点是可以在较小的空间内实现多种功能的切换。
而且,由于旋转编码器可以检测旋转方向,因此可以在不同的位置之间进行快速切换。
总之,旋转编码开关利用旋转编码器的原理实现了位置切换和功能切换,可广泛应用于电子设备中,如音频设备、工控设备等。
它具有结构简单、可靠性高、操作灵活等优点。
数字旋转编码开关的原理及使用方法

在电子产品设计中,经常会用到旋转编码开关,比如数码电位器等,它的英文名翻译过来就是Rotary Encoder Switch。在写、右转和按下三个功能,有五个脚,它的外形如下图所示:
(1)1、3脚要外接上拉电阻,一般10K就足矣;
(2)2脚一般接地就行;
(3)4、5脚是下按键的开关接线(按下时,4脚为低电平);
我调试这个元件时的实物接线示意图为:
其实它使用起来并不难,我看到网上的资料大都说操作它时判断正转和反转是一个难点,在这里我希望博友在看了我的代码后会觉得这其实只是一个“传说”!我的代码会把这个问题说的清清楚楚、简简单单的!我觉得其实判断正转和反转的关键就是:当BMA为低电平时,BMB的跳变沿是怎样的——上升沿表示正转,下降沿表示反转。只要用代码把这个描述清楚就OK了,这个器件就基本可以顺利地操作了。
没有多余的再说了,直接附上代码:
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit BMA=P1^4;
sbit BMB=P1^5;
sbit BMC=P1^6;
sbit P27=P2^7;
sbit P26=P2^6;
P26=0;
delay(10);
P26=1;
P0=table[count/100]; //百位
P25=0;
delay(10);
P25=1;
}
//************************************************
void main()
{
TMOD="0x01"; //定时器0,工作方式1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
if(flag==1)
{
flag="0"; //时刻要注意这一点!给标志位清零
if((Last_BMB_status==0)&&(Current_BMB_status==1)) //BMB上升沿表示正转
{
count++;
if(count==255)
数字旋转编码开关的原理及使用方法
在电子产品设计中,经常会用到旋转编码开关,比如数码电位器等,它的英文名翻译过来就是Rotary Encoder Switch。在写、右转和按下三个功能,有五个脚,它的外形如下图所示:
void timer0() interrupt 1 //定时器0的中断服务程序
{
TH0=0xD8;
TL0=0xF0; //再次装入初值
display(); //每隔10ms显示一次
if(!BMC) //按下旋转编码开关则计;;
}
}
void delay(uchar z) //大约1ms的延时
{
uchar x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void display() //显示子程序
{
P0=table[count%10]; //个位
P27=0;
delay(10);
P27=1;
P0=table[count%100/10]; //十位
sbit P25=P2^5;
uchar code table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90};
uchar count=0;
uchar flag;
uchar Last_BMB_status;
uchar Current_BMB_status;
TH0=0xD8;
TL0=0xF0; //给定时器装上初值,10ms中断一次
ET0=1; //打开定时器中断
EA =1; //打开总中断
TR0=1; //启动定时器0
while(1)
{
Last_BMB_status=BMB;
while(!BMA) //BMA为低电平时
{
Current_BMB_status=BMB;
(1)1、3脚要外接上拉电阻,一般10K就足矣;
(2)2脚一般接地就行;
(3)4、5脚是下按键的开关接线(按下时,4脚为低电平);
我调试这个元件时的实物接线示意图为:
其实它使用起来并不难,我看到网上的资料大都说操作它时判断正转和反转是一个难点,在这里我希望博友在看了我的代码后会觉得这其实只是一个“传说”!我的代码会把这个问题说的清清楚楚、简简单单的!我觉得其实判断正转和反转的关键就是:当BMA为低电平时,BMB的跳变沿是怎样的——上升沿表示正转,下降沿表示反转。只要用代码把这个描述清楚就OK了,这个器件就基本可以顺利地操作了。
{
count="0";
}
}
if((Last_BMB_status==1)&&(Current_BMB_status==0)) //BMB下降沿表示反转
{
count--;
if(count==0)
{
count="255";
}
}
}
}
}
//************************************************
没有多余的再说了,直接附上代码:
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit BMA=P1^4;
sbit BMB=P1^5;
sbit BMC=P1^6;
sbit P27=P2^7;
sbit P26=P2^6;
P26=0;
delay(10);
P26=1;
P0=table[count/100]; //百位
P25=0;
delay(10);
P25=1;
}
//************************************************
void main()
{
TMOD="0x01"; //定时器0,工作方式1