模拟量控制直流电机转速实验
基于PLC和触摸屏实现模拟量控制电机调速
基于PLC和触摸屏实现模拟量控制电机调速孟志刚;刘丽芳【摘要】The design of the Analog motor open loop speed control system based on S7-200PLC、MM420 Inverter and Siemens SMART LINE touch screen is introduced.The design consists of local control and remote control, it enables to improve the reliability of the system. The control system is simple and practical.%本文介绍基于S7-200PLC、MM420变频器和西门子SMART LINE 触摸屏实现模拟量控制电机开环调速系统的设计。
该设计的控制方式分为本地控制和远程控制两种方式,可以通过机械按钮和触摸屏对电机的频率进行加1或减1控制,此系统采用两种控制方式可提高系统运行的可靠性,同时控制程序简单、实用。
【期刊名称】《电子测试》【年(卷),期】2016(000)016【总页数】2页(P43-44)【关键词】PLC;变频器;触摸屏;组态【作者】孟志刚;刘丽芳【作者单位】开封大学电子电气工程学院,河南开封,475004;开封大学电子电气工程学院,河南开封,475004【正文语种】中文在一些工业领域常用到一些模拟量控制电机转速的生产设备,而通过变频器来改变电机的频率是最常用的方法。
本设计中要求用模拟量来控制电机以10~50HZ的频率运行,触摸屏作为上位机,有启动、停止、加速、减速按钮,运行指示灯,运行频率显示;PLC作为下位机,读取输入信号并进行处理,输出端给变频器的数字量输入端,控制变频器的启动,而扩展模块EM235输出0~10V电压给变频器的模拟输入端;变频器作为执行机构直接控制电机的频率,从而控制电机的转速。
基于Proteus仿真的直流电机控制

前言 (1)正文 (1)2.1 设计目的和意义 (1)2.1.1 设计目的 (1)2.1.2 设计意义 (1)2.2 设计方法 (1)2.3设计内容 (2)2.3.1 89C51单片机介绍 (2)2.3.2内容概要 (3)2.4电路分析 (3)2.4.1程序流程图 (3)2.4.2元件清单 (4)2.4.3程序电路图 (5)2.4.4程序运行结果 (5)2.4.5 Proteus调试与仿真 (5)结论 (6)总结 (7)参考文献 (8)直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂.功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。
随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。
采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。
正文2.1 设计目的和意义2.1.1 设计目的作为理工科的学生应该在学习与动手实践中提高自己的专业技能知识,通过课程设计使我进一步熟悉了单片机的内部结构和工作原理,掌握了单片机应用系统设计的基本方法和步骤;通过利用AT89C52单片机,理解单片机在自动化装置中的作用以及掌握单片机的编程调试方法;通过设计一个简单的实际应用输入控制及显示系统,掌握protues和Wave以及各种仿真软件的使用。
现在的学习都是为以后的发展而做铺垫,通过课程设计提高自己的动手能力。
2.1.2 设计意义加深理解直流电机在单片机上的运用,增进对电路仿真的兴趣。
2.2 设计方法定义输出或输入为直流电能的旋转电机,称为直流电机,它是能实现直流电能和机械能互相转换的电机。
8、PWM控制直流电机实验
南昌大学实验报告学生姓名:黄鹏飞学号:6100212197 专业班级:中兴通信121实验类型:□验证□综合■设计□创新实验日期:2014-5-21 实验成绩:PWM 控制直流电机实验一、实验目的熟练掌握汇编语言程序的编辑、调试和运行的过程和方法。
了解汇编语言程序的汇编、运行环境。
1.熟悉直流电动机的工作特性。
2.学习PWM 控制直流电机转速的方法。
二、实验要求1.掌握常用的编辑工具软件(如WORD、EDIT)、MASM和LINK的使用;2.根据系统提供的直流电机驱动,使用单片机PWM 驱动直流电机,并通过简单扩展口74LS244 读入8 位开关量,来控制PWM 的占空比,从而控制直流电机的转速。
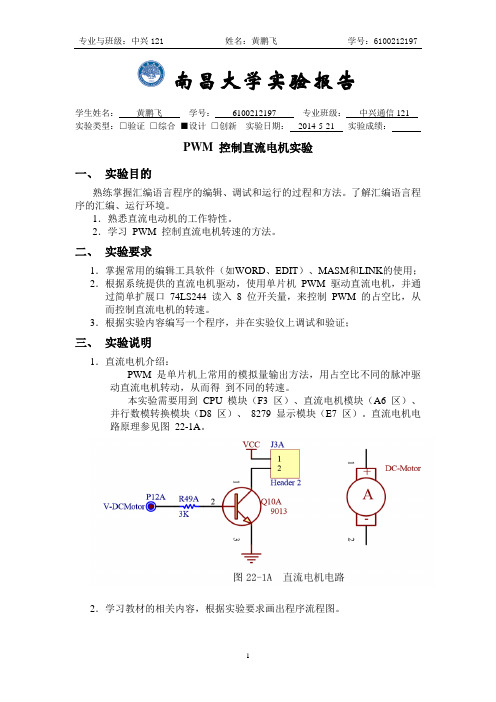
3.根据实验内容编写一个程序,并在实验仪上调试和验证;三、实验说明1.直流电机介绍:PWM 是单片机上常用的模拟量输出方法,用占空比不同的脉冲驱动直流电机转动,从而得到不同的转速。
本实验需要用到CPU 模块(F3 区)、直流电机模块(A6 区)、并行数模转换模块(D8 区)、8279 显示模块(E7 区)。
直流电机电路原理参见图22-1A。
2.学习教材的相关内容,根据实验要求画出程序流程图。
3.本例说使用的汇编的软件以一个高度集成的优化DOS软件—WinMasmV2.2。
四、实验程序;//*文件名: DCMotor FOR 8088;功能:PWM控制直流电机转速实验;接线:连接直流电机模块的V-DCMotor到8255模块的PC0;; 连接8255模块的CS_8255到CPU模块的200H;; 用导线连接CPU模块的208H到扩展输入模块的CS_244;; 用8位数据线连接八位逻辑电平输出模块的JD1E到扩展输入模块的JD2C;; 八位逻辑电平显示模块的JD4B到扩展输出模块的JD1C。
;//******************************************************************* *PA8255 EQU 200H ;8255PA口地址PB8255 EQU 201H ;8255PB口地址PC8255 EQU 202H ;8255PC口地址PCTL8255 EQU 203H ;8255控制口地址D244 EQU 208HCODE SEGMENTASSUME CS:CODESTART:PUSH CSPOP DSMOV DX,PCTL8255MOV AL,80H ;设置8255口为输出口OUT DX,ALMOV DX,D244 ; 并行输入口地址IN AL,DX ; 输入数据,读开关状态MOV AH,ALDRIVE: CALL PWMMOV DX,D244 ; 并行输入口地址IN AL,DX ; 输入数据,读开关状态CMP AL,AHJE DRIVEMOV AH,ALJMP DRIVEPWM:MOV DX,PCTL8255MOV AL,01H ;PC0: 置“1”OUT DX,ALMOV CH,0MOV CL,AHCALL DELAYMOV AL,00H ;PC0: 置“0”OUT DX,ALNOT AHMOV CH,0MOV CL,AHCALL DELAYRETDELAY: MOV AL,CLCMP AL,0JNZ TOLOOPINC CLTOLOOP:LOOP $RETCODE ENDSEND START五、实验步骤与结果1)系统各跳线器处在初始设置状态。
电气传动实验报告(手写)
实验一 直流电机转速特性测定一、实验目的1.了解转速开环直流调速系统的组成。
2.测定晶闸管-电动机调速系统的转速特性。
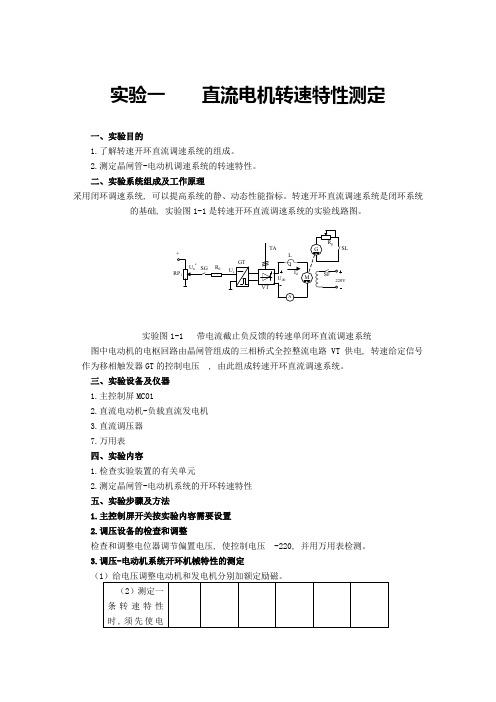
二、实验系统组成及工作原理采用闭环调速系统, 可以提高系统的静、动态性能指标。
转速开环直流调速系统是闭环系统的基础, 实验图1-1是转速开环直流调速系统的实验线路图。
实验图1-1 带电流截止负反馈的转速单闭环直流调速系统图中电动机的电枢回路由晶闸管组成的三相桥式全控整流电路VT 供电, 转速给定信号 作为移相触发器GT的控制电压 , 由此组成转速开环直流调速系统。
三、实验设备及仪器 1.主控制屏MC012.直流电动机-负载直流发电机3.直流调压器 7.万用表 四、实验内容1.检查实验装置的有关单元2.测定晶闸管-电动机系统的开环转速特性 五、实验步骤及方法1.主控制屏开关按实验内容需要设置2.调压设备的检查和调整检查和调整电位器调节偏置电压, 使控制电压 -220, 并用万用表检测。
3.调压-电动机系统开环机械特性的测定(动机空载(发电机负载回路开路), 慢慢加电压, 使电动机转速慢慢上升至额定转速, 改变负载变阻器的阻值, 使主回路电流达到额定电流, 此时即为额定工作点(, )。
然后再改变负载变阻器,使主回路电流从额定电流减少至空载电流, 画出转速特性。
n(r/min)I a(A)六、实验注意事项1. 调压电路正常后, 方可合上主回路电源开关SW。
2.不允许突加给定开关起动电动机, 这时, 每次起动时必须慢慢增加给定, 以免产生过大的冲击电流。
更不允许通过突合主回路电源开关SW起动电动机。
七、实验思考题n1. 电枢电压不变, 电机转速随电枢电流如何变化?答:根据Ua=CeΦn+RaIa , 由于电枢电压Ua不变, 电枢电流Ia增大, 电枢绕组等效电阻Ra上的分压变大, 而感应电动势CeΦn减小, 所以转速n下降。
实验二直流电机调压调速一、实验目的1.了解转速开环直流调速系统的组成。
光电传感器控制电机转速实验重点

实验二十八光电传感器控制电机转速实验一、实验目的:了解光电传感器(光电断续器—光耦)的应用。
学会智能调节器的使用。
二、基础原理:利用光电传感器检测到的转速频率信号经F/V转换后作为转速的反馈信号,该反馈信号与智能人工调节仪的转速设定比较后进行数字PID运算,调节电压驱动器改变直流电机电枢电压,使电机转速趋近设定转速(设定值:400转/分~2200转/分)。
转速控制原理框图如图28—1所示。
图28-1 转速控制原理框图三、需用器件与单元:主机箱中的智能调节器单元、+5V直流稳压电源;转动源、光电转速传感器—光电断续器(已装在转动源上)。
附:智能调节器简介:(一)、概述:主机箱中所装的调节仪表为人工智能工业调节仪,仪表由单片机控制,具有热电阻、热电偶、电压、电流、频率TTL电平等多种信号自由输入(通过输入规格设置),手动自动切换,主控方式在传统PID控制算法基础上,结合模糊控制理论创建了新的人工智能调节PID控制算法,在各种不同的系统上,经仪表自整定的参数大多数能得到满意的控制效果,具有无超调,抗扰动性强等特点。
此外仪表还具有良好的人机界面,仪表能根据设置自动屏蔽不相应的参数项,使用户更觉简洁易接受。
(二)、主要技术指标:1、基本误差:≤±0.5%F.S±1个字,±0.3%F.S±1个字2 、冷端补偿误差:≤±2.0℃3 、采样周期: 0.5秒4 、控制周期:继电器输出与阀位控制时的控制周期为2~120秒可调,其它为2秒。
5 、报警输出回差(不灵敏区): 0.5或56 、继电器触点输出: AC250V/7A(阻性负载)或AC250V/0.3A(感性负载)7 、驱动可控硅脉冲输出:幅度≥3V,宽度≥50μS的过零或移相触发脉冲(共阴)8 、驱动固态继电器信号输出:驱动电流≥15mA,电压≥9V9 、连续PID调节模拟量输出: 0~10mA(负载500±200Ω), 4~20mA(负载250±100Ω),或 0~5V(负载≥100kΩ), 1~5V(负载≥100kΩ)10 、电源: AC90V~242V(开关电源), 50/60Hz,或其它特殊定货11 、工作环境:温度0~50.0℃,相对湿度不大于85%的无腐蚀性气体及无强电磁干扰的场所(三)、调节器面板说明:面板上有PV测量显示窗、SV给定显示窗、4个指示灯窗和4个按键组成。
《电机调速综合实训》课程标准

《电机调速综合实训》课程标准课程代码课程类别专业课程课程类型实践课程课程性质必修课程课程学分1学分课程学时24学时修读学期第4学期适用专业电气自动化技术合作开发企业长春发电设备有限公司执笔人陈丽敏、王涛审核人杨华1.课程定位与设计思路1.1课程定位本课程是电气自动化技术专业的一门单项技能训练课程,是专业必修课程。
其目标是通过对电动机的交直流调速综合实训深化交直流调速理论知识的实际应用,对学生进行交直流调速驱动设备的型号识别、外围电路接线、参数设置、交直流调速驱动设备的使用方法训练。
通过实训使学生具有直流调速装置及变频器的型号识别、外围端子接线、调速参数设置能力。
与后续电气控制柜装配等课程相衔接,共同培养学生对电动机交直流调速技术综合应用的实践能力。
1.2设计思路通过对电气自动化技术专业工作岗位分析,根据专业人才培养目标,确定本课程的学习内容为直流电动机的开环测速、交流电动机的变频调速。
采用项目化实训教学方式,把每一个项目设计成工作任务,通过完成典型工作任务,使学生了解交直流调速系统的工作原理、调速指标及调速方法;掌握变频器的参数分组设置;综合训练学生交直流调速驱动设备的型号识别、外围电路接线、参数设置操作等实践应用技能。
参考学时:24学时,参考学分:1学分。
2.课程目标通过本课程的学习,使本专业的学生能够进一步理解交直流调速技术的基础知识,掌握常用的交直流调速系统的组成、工作原理、调速指标、调速方法、具有交直流调速驱动设备的型号识别、外围电路接线、参数设置操作等实践应用技能。
培养学生独立思考分析与解决问题的能力,同时为学习电气控制柜装配等后续课程打下坚实的基础。
具体如下:2.1能力目标(1)能够正确识别与分析交直流控制系统的特性。
(2)能够熟练使用实验台进行直流电动机的开环测速。
(3)能够熟练使用变频器进行交流三相异步电动机的调速控制。
(4)能够按照交直流调速系统的控制要求进行设备的选型。
(5)能够根据系统功能进行系统调试和简单故障检修。
2014DVCC实验指导书

实验一指令系统和编程练习实验类型:验证一、实验目的进一步掌握汇编语言设计和调试方法。
二、实验内容把7000H、7001H的低位相拼后送入7002H,一般本程序用于把显示缓冲区的数据取出拼装成一个字节。
三、实验程序框图图1 拼字实验程序框图四、实验步骤1、双击桌面上DVCC实验系统图标,在源程序文件编辑窗口编辑实验源程序。
2、设定仿真模式。
选择“选项”菜单中的“系统设置”子菜单,将仿真方式设定为内程序、内数据。
3、PC机与DVCC实验系统联机。
首先,DVCC实验系统上电,按下DVCC实验系统的红色复位按钮,在数码管显示“P.”的状态下,按下监控键盘的PCDBG键,其次,点击DVCC联机软件调试工具栏的联接按钮。
若联机通过,在软件主窗口中显示源程序文件编辑窗口、寄存器窗口及反汇编窗口,表示可以进行后续的工作,否则,提示:联机失败!重试?此时,应查找原因,直至联机通过。
4、应用联机软件中将7000H单元数据置成03H,7001H单元数据置成04H。
操作如下:(1)选择“动态调式”菜单中的“填充数据”选项,出现数据块操作对话框。
(2)在数据块操作对话框中,点击”填充”项。
方法一:在参数输入选项中,选择相同数据,将起始地址设为7000,中止地址设为7000,填充数设为03。
操作对象选择仿真RAM。
“填充”项设定完毕,点击开始按钮后点击关闭,则将7000H单元数据置成03H,采用相同的方法可设置7001H单元为04H。
方法二:在参数输入选项中,选择增量数据,将起始地址设为7000,中止地址设为7001,数据上设为03,数据下设为04。
操作对象选择仿真RAM。
“填充”项设定完毕,点击开始按钮后点击关闭,则将7000H单元数据置成03H,7001H单元数据置成04H。
5、编译实验源程序。
点击调试工具栏编译按钮,若源程序没有错误,信息窗口应提示:NO ERROR FOUND。
否则,在信息窗口中显示相应的错误说明,此时,双击信息窗口中出错说明所在行回到源程序文件编辑窗口查错,直至编译通过,没有错误信息。
直流电机控制(PID)实验报告
s = speed1 % 100 / 10;
g = speed1 % 100 % 10;
sent(table[b]);
sent(table[s]);
sent(table[g]);
sent(0); sent(0);//预期值
sent(table[speedset/100]);
out=0;
uk1=uk;//为下一次增量做准备
e2=e1;
e1=e;
PWMTime=out; //out对应于PWM高电平的时间
return(0);
}
void PWMOUT()
{
//PWM=1;
if(cnt<PWMTime)//若小于PWM的设定时间,则输出高电平
PWM=1;
else//否则输出低电平
三、仪器及原理图
实验仪器:THKL-C51仿真器
四、实验代码
%增量式
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
#define ufloat unsigned float
sbit PWM=P1^2;
sbit DIN=P1^0;
sbit CLK=P1^1;
uint num;
float count=0;
uint cnt,n=0;
uint out;
uint PWMTime;
uchar code table[] = { 0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x77,0x7C,0x39,0x5E,0x7B,0x71,0x00,0x40 };
电力电子技术及自动控制系统实验指导书:晶闸管直流调速系统的调试

实验三 晶闸管直流调速系统的调试一、实验目的1.分析晶闸管半控桥式整流电路电机负载(反电动势负载)时的电压、电流波形。
2.熟悉典型小功率晶闸管直流调速系统的工作原理,掌握直流调速系统的整定与调试。
3.测定直流调速系统的机械特性。
二、实验设备高自EAD —I 型电力电子与自控系统实验装置 万用表 双踪示波器 滑动变阻器直流电机机组,带涡流制动和机械制动负载,并有光电数字测速计及转速反馈模拟量输出。
机组的直流电机为SZD01型稀土高性能永磁直流电动机,电机的额定值为P nom =100W ,U nom =90V ,I nom =1.5A ,n nom =1000,T nom =1Nm ,Ω=11a R 。
三、实验电路实验电路具体接线如图3-1所示 四、实验原理此调速系统是小容量晶闸管直流调速装置,适用于4kW 以下直流电动机无级调速。
装置的主回路采用单相半控桥式晶闸管可控整流电路,触发电路采用电压控制的单结晶体管移相触发电路。
具有电压负反馈和电流正反馈及电流截止负反馈环节,电路均为分离元件,用于要求不太高的小功率传动调速场合。
1.晶闸管直流调速系统的基本工作原理虽然采用转速负反馈可以有效地保持转速的近似恒定,但安装测速发电机比较麻烦,费用也多。
所以在要求不太高的场合,往往以电压负反馈加电流正反馈来代替转速负反馈。
这是由于当负载转矩变化(设转矩增加)而使转速降低时,电动机的电枢电流将增加,而电流的增加,整流装置的内阻和平波电抗器上的电压降落也成正比地增加,这样,电动机电枢两端的电压将减小,转速也因此要下降,因而可考虑引入电压负反馈,使电压保持不变。
另一方面,电枢电流(d I )的大小也间接地反映了负载转矩l T (扰动量)的大小(d T m l I K T T Φ=≈),因此可考虑采用扰动顺馈补偿,引入电流正反馈,以补偿因负载转矩l T (扰动)增加而形成的转速降。
电压负反馈不能弥补电枢压降所造成的转速降落,调速性能不太理想。
直流调速控制系统的分析及仿真
当电流负反馈环节起主导作用时的自动调节过程如图7-1-8所示。
7.1.4系统的性能分析
代入图7-1-5中,由图可见,它是一个二阶系统,已知 二阶系统总是稳定的。但若考虑到晶闸管有延迟,晶 闸管整流装置的传递函数便为
相反。
5.电流截止负反馈环节
当 时,(亦即 ),则二极管VD截止,电流截止负反馈不起作用。当 时,(亦即 ),则二极管VD导通, [此处略去二极管的死区电压],电流截止负反馈环节起作用,它将使整流输出电压 下降,使整流电流下降到允许最大电流。 的数值称为截止电流,以 表示。调节电位器RP3即可整定 ,亦即整定 的数值。一般取 〔 为额定电流〕。 由于电流截止负反馈环节在正常工作状况下不起作用,所以系统框图上可以省去。
在图7-1-1中,主电路中串联了一个阻值很小的取样电阻
(零点几欧)。电阻
上的电压
与
成正比。比 较阈值电压
是由一个辅助电源经电位器RP3提供的。电 流反馈信号(
图7-1-7调速系统的“挖土机”机械特性
当电流负反馈环节起主导作用时的自动调节过程如图7-1-8所示。 机械特性很陡下垂还意味着,堵转时(或起动时)电流不是很大。 这是因为在堵转时,虽然转速n=0,反电动势E=0,但由于电流 截止负反馈的作用,使
大大下降,从而
不致过大。此时 电流称为堵转电流
⑥ 晶闸管整流电路的调节特性为输出的 平均电压
与触发电路的控制电压
之间的关系,即
图7-1-4为晶闸管整流装置的调节特性。
由图可见,它既有死区,又会饱和。 (当全导通以后,
再增加, 也不会再 上升了),且低压段还有弯曲段。面对 这非线性特性,常用的办法是讲它“看 作”一条直线,即处理成
为
实验指导书
实验一 直流无刷电动机控制实验一、 实验目的1、了解直流无刷电动机的控制方式2、了解直流无刷电动机驱动器BL-0408的使用方法3、了解直流无刷电动机的启停、转速、转向控制4、了解利用西门子可编程控制器(PLC)S7-200的开发环境Step-7开发直流无刷电动机控制程序5、了解利用触摸屏监控PLC进行直流无刷电动机控制6、了解利用西门子组态软件WinCC组态软件监控直流无刷电动机运行的方法二、 实验对象1、直流无刷电机的控制方式利用驱动器BL-0408可以进行启停、转速、转向控制,转速信号可采用BL-0408自带的电位器进行调速,也可采用外接模拟电压进行调速。
外接模拟电压可由PLC产生的数字信号经D/A转换后得到,启停信号、转速信号、转向信号均可由PLC进行控制。
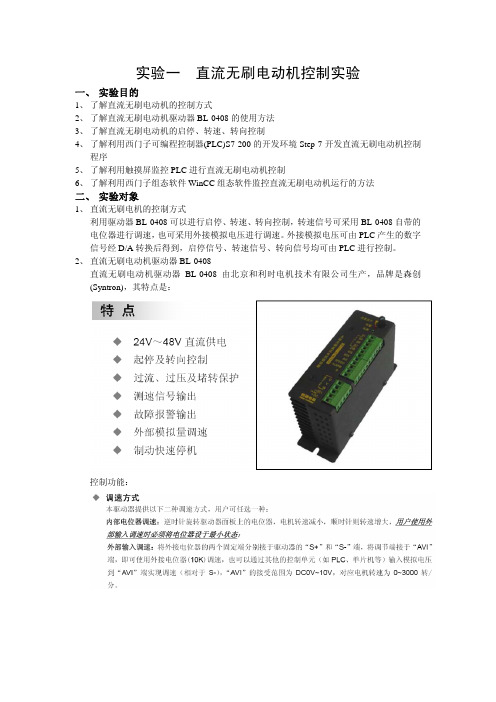
2、直流无刷电动机驱动器BL-0408直流无刷电动机驱动器BL-0408由北京和利时电机技术有限公司生产,品牌是森创(Syntron),其特点是:控制功能:3、直流无刷电动机57BL-0730N1-LS-B直流无刷电动机57BL-0730N1-LS-B由北京和利时电机技术有限公司生产,品牌是森创(Syntron)。
技术数据森创电机型号说明4、可编程控制器(PLC)与STEP 7z西门子S7-200系列小型PLC(Micro PLC)可应用于各种自动化系统。
紧凑的结构、低廉的成本以及功能强大的指令集使得S7--200 PLC成为各种小型控制任务理想的解决方案。
S7-200产品的多样化以及基于Windows的编程工具,使您能够更加灵活地完成自动化任务。
z S7-200 CPU包括CPU 221、CPU 222、CPU 224、CPU 224XP和CPU 226等型号,此处使用的是CPU224XP。
z STEP 7-Micro/WIN 4.0版是用于S7-200的32位编程软件包,它包括:z支持最新CPU增强功能的新软件工具和改进过的软件工具: PID自整定控制面板、PLC内置位控向导、数据归档向导和配方向导。
最新实验三、电机控制实验报告

最新实验三、电机控制实验报告实验目的:1. 理解并掌握电机控制系统的基本原理。
2. 学习电机启动、停止、正反转控制的方法。
3. 熟悉电机保护环节的设置和作用。
4. 掌握电机速度控制和位置控制的实验技能。
实验设备:1. 直流电机或交流电机。
2. 电机驱动器。
3. 控制电路板。
4. 电源。
5. 测量仪器(如电压表、电流表、转速表等)。
6. 连接导线和必要的保护元件。
实验原理:电机控制系统通常由控制单元、驱动单元和执行单元组成。
控制单元负责发出控制指令,驱动单元将控制信号转换为电机所需的电信号,执行单元即电机本身,根据电信号进行相应的动作。
本实验中,我们将通过改变控制信号来实现对电机的基本控制。
实验步骤:1. 准备工作:检查所有设备是否完好,确保电源电压符合要求。
2. 连接电路:按照实验指导书的电路图连接电机控制电路。
3. 启动电机:打开电源,逐步增加电机的供电电压,观察电机启动情况。
4. 正反转控制:切换控制信号,使电机实现正反转,并记录转速。
5. 速度控制:调整控制参数,改变电机转速,并记录不同速度下的电机表现。
6. 位置控制:设置电机转动角度,实现位置控制,并检查控制精度。
7. 保护环节测试:模拟电机过载、堵转等异常情况,验证保护环节的有效性。
8. 数据记录与分析:记录实验数据,分析电机控制效果,总结实验中的问题和改进措施。
实验结果:1. 电机启动和停止过程平稳,无异常噪声。
2. 正反转控制响应迅速,电机转动方向准确。
3. 速度控制实验中,电机转速能够在设定范围内精确调节。
4. 位置控制实验显示电机转动角度准确,误差在允许范围内。
5. 保护环节在模拟异常情况下能够及时动作,保护电机不受损害。
实验结论:通过本次实验,我们成功实现了对电机的基本控制操作,包括启动、停止、正反转、速度控制和位置控制。
实验结果表明,所设计的电机控制系统性能稳定,控制效果良好,满足实验要求。
同时,电机的保护环节能够有效地在异常情况下保护电机,确保系统的安全运行。
基于LabVIEW的直流电机转速监测实验设计

基于LabVIEW的直流电机转速监测实验设计许丽川;苏朝阳;梁永春;丛培强;李逢春;白连生【摘要】现代工业过程测量和控制离不开上位机对工业现场信号的采集、处理、显示和存档,G语言在上位机监控管理软件的设计中发挥着越来越多的作用.文章结合LabVIEW语言在传感器测量实验教学中的应用,介绍了基于LabVIEW的电机转速监测实验设计.实验搭建了直流电机转速测控实验平台,完成了基于数据采集卡A/D通道、DI通道和CNT通道的三种电机测速方式的LabVIEW编程,并进行了转速的在线监测.该系列实验旨在使学生熟悉LabVIEW编程,掌握数据采集卡的使用方法,增强感性认识,逐步具有现代工业过程测控系统的设计能力.【期刊名称】《实验科学与技术》【年(卷),期】2013(011)004【总页数】4页(P56-59)【关键词】工业过程测量和控制;转速监测实验;LabVIEW;数据采集卡【作者】许丽川;苏朝阳;梁永春;丛培强;李逢春;白连生【作者单位】电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731;电子科技大学机械电子工程学院,成都611731【正文语种】中文【中图分类】TM332;TP39工业过程测量和控制系统广泛应用于石油、化工、电力、煤炭、冶金、纺织、轻工、食品、烟草等各个领域,是工业化与信息化融合的桥梁和手段[1]。
现代工业过程测量和控制离不开多种信号的采集、处理、显示和存档,随着PLC或嵌入式系统成为工业控制核心的主流,大型的工业网络中上位机对各种信号的监控管理系统可视化、人性化的操作界面广泛取代了简单的符号界面。
目前,上位机监控管理软件的实现主要有三种工具:1)传统的C,C++或VB等语言如采用VC++在Windows平台上实现流程行业的过程监控软件[2]。
直流电机性能检测(测试)

SYDCMCS-1智能型直流电机性能综合测试实验装置(上海上益教育设备制造有限公司)(设备外形参考图片,具体结构以实物配置为准)一、概述SYADMCS-1智能型交直流电机性能综合测试实验装置是集直流电机,交流电机对应的控制,运行,机械特性、电气特性的测试和教学实验于一体,配套先进的检测控制手段,对以上各种运行方式进行定量分析,采集电机运行的各种参数。
学生可通过一个嵌入式触摸屏电脑实现采集数据的显示、系统控制、加载控制等。
本实验台从专用电源控制台、仪器仪表、电机、导轨、负载及专用导线到配套软件等均配套齐全。
电机负载采用高性能、长寿命的新型磁粉制动器,负载调节稳定、可靠、方便。
即可稳态测试,也可以进行快速瞬间测试。
一台基于W i n C E ( 中文版 ) 操作系统、内嵌Homebuilder嵌入版组态软件的触摸屏作为人机界面,它在系统中作为数据输入、显示监控及控制终端。
该终端采用RS-485/232接口采集模块进行通讯,数据采集模块将传感器的检测值上传给终端进行显示或用于监控,本款教学设备的终端还可下达操作指令给执行模块从而实现对程控设备的调节,进而实现对电机电枢电压及负荷的控制。
二、系统主要设备及参数1.电源控制屏设有电压输入指示仪表,急停按钮,过载保护等措施,设有0-30V/2A直流可调电源,电源电压及电流输出均可调,带有保护措施。
3相交流电源输出带电流及电压漏电保护措施。
2.实验桌实验桌为铁质双层亚光密纹喷塑结构,桌面为防火、防水、耐磨高密度板,结构坚固,形状似长方体封闭式结构,造形美观大方;设有两个大抽屉、柜门,用于放置工具、存放挂件及资料等。
桌面用于安装电源控制屏并提供一个宽敞舒适的工作台面。
实验桌还设有四个万向轮和四个固定调节机构,便于移动和固定,有利于实验室的布局。
3.直流他(并)励直流电机 1台电枢电压直流220V,励磁电压直流220V 功率185W 转速1500转/分钟。
4. 直流电机调速器1只0~220V可调,电压输出线性可控,控制信号4-20mA。
实验五小直流电机转速控制
实验五 小直流电机转速控制一、实验目的1.进一步掌握DAC0832的性能及编程应用。
2.了解直流电机的调速方法。
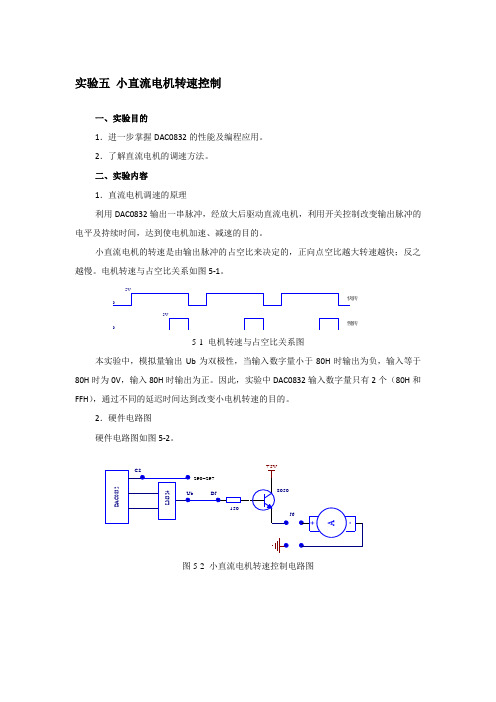
二、实验内容1.直流电机调速的原理利用DAC0832输出一串脉冲,经放大后驱动直流电机,利用开关控制改变输出脉冲的电平及持续时间,达到使电机加速、减速的目的。
小直流电机的转速是由输出脉冲的占空比来决定的,正向点空比越大转速越快;反之越慢。
电机转速与占空比关系如图5-1。
5-1 电机转速与占空比关系图本实验中,模拟量输出Ub 为双极性,当输入数字量小于80H 时输出为负,输入等于80H 时为0V ,输入80H 时输出为正。
因此,实验中DAC0832输入数字量只有2个(80H 和FFH ),通过不同的延迟时间达到改变小电机转速的目的。
2.硬件电路图 硬件电路图如图5-2。
图5-2 小直流电机转速控制电路图5V5V快转慢转图5-3 直流电机转速控制框3.硬件连线按图5-2连接线路。
DAC0832的CS接290H~297H,Ub接DJ插孔,实验盒上直流电机插头接实验台上的J6。
8255的CS接288H~28FH。
4.编程提示(1)程序框图程序框图如图5-56。
(2)参考程序程序清单:ZLDJ.ASMPORT1 EQU 290HPORT2 EQU 28BHPORT3 EQU 28AHDA TA SEGMENTBUF1 DW?BUF2 DW?DA TA ENDSCODE SEGMENTASSUME CS:CODESTART:MOV DX,PORT2MOV AL,8BHOUT DX,AL ;8255C口输入LLL:MOV AL,80HMOV DX,PORT1OUT DX,AL ;D/A输出MOV AH,1INT 16HJE INTK ;有无键按下MOV AH,4CHINT 21H;INTK:MOV DX,PORT3IN AL,DX ;读开关状态TEST AL,01HJNZ K0TEST AL,02HJNZ K1TEST AL,04HJNZ K2TEST AL,08HJNZ K3TEST AL,10HJNZ K4TEST AL,20HJNZ K5JMP LLLK0:MOV BUF1,0400HMOV BUF2,0330H ;置延时常数DELAY:MOV CX,BUF1DELAY1:LOOP DELAY1MOV AL,0FFH ;D/A输入5VMOV DX,PORT1OUT DX,ALMOV CX,BUF2DELAY2:LOOP DELAY2JMP LLLK1:MOV BUF1,0400HMOV BUF2,0400HJMP DELAYK2:MOV BUF1,0400HMOV BUF2,0500HJMP DELAYK3:MOV BUF1,0400HMOV BUF2,0600HJMP DELAYK4:MOV BUF1,0400HMOV BUF2,0700HJMP DELAYK5:MOV BUF1,0400HMOV BUF2,0800HJMP DELAYCODE ENDSEND START。
运动控制系统实验报告

实验陈述之答禄夫天创作步进电机控制实验实验目的:掌控编程的灵活性和简洁性,学习PLC 控制步进电机的方法。
步进电机有两相绕组,分别为A 相绕组和B 相绕组,端子为AB每相中间已接±24V 直流电源的+24V 端,A B依照步进电机的运行规律,由可编程序控制器轮流输出信号控制,工作方式为双四拍。
正反转步序参考如下表:实验任务:程序启动后,按下启动按钮,电机启动,按下停止按钮,电机停止,按下反向按钮,电机反向启动。
I/O 分配:实验二转速控制实验实验任务:步进电机的旋转速度由轮流通电频率控制。
程序启动后,按下启动按钮,前10秒电机转速由慢变快,接下来10秒快变慢,如此循环。
I/O分配:输入信号信号元件及作用I0.0 I0.2 启动停止输出信号控制对象及作用Q0.0 Q0.1 Q0.2 Q0.3 A A B B 实验三定步旋转实验实验任务:实验所用步进电机的步进角为7.5°。
程序启动后,按下启动按钮,使转盘按每次90°和180°的设定值交替转动,每两次之间停止1秒钟。
I/O分配:输入信号信号元件及作用I0.0 启动输出信号控制对象及作用Q0.0 Q0.1 Q0.2 Q0.3 A A B B 三相交流异步电动机控制实验一.实验目的:根据三相交流异步电机的原理图,学习用PLC来控制电机的正反转和Y/△启动的方法。
二.实验介绍:右图为三相交流异步电机的实验原理及实验模拟图。
此实验的控制对象是一台三相交流异步电动机,要完成的功能的是用PLC控制三相交流异步电动机的正反转和Y/△启动。
要完成这两项功能,除电机外,还需要四组三相交流接触器KM1、KM2、KMY和KM△,以及3个按钮SB1、SB2、SB3。
三相异步电动机控制实验示意图图中的M代表三相交流异步电动机,两个箭头旁分别有一个发光二极管,其中,红灯亮暗示电机正转,绿灯亮暗示电机反转,都不亮暗示电机停转;代表KM1、KM2、KMY和KM△的发光二极管亮时暗示该接触器线圈得电,对应的常开触点闭合。
变频器模拟量控制

天津电子信息职业技术学院综合实训报告课题名称变频器模拟量控制姓名学号班级专业电气自动化技术所在系电子技术系指导教师完成日期2013年12月30日一、实训目的1.了解变频器的基本概念、发展趋势、分类及应用方向。
2.了解变频器的工作原理。
3.掌握MM420变频器的模拟信号控制。
4.进一步掌握变频器基本参数的输入方法。
5.熟练掌握变频器的运行操作。
二、实训单位天津电子信息职业技术学院三、实训内容1. 变频器概述变频器是将固定电压、固定频率的交流电变换为可调电压、可调频率的交流电装置。
它的问世使电气传动领域发生了深刻的技术革命。
有数据显示,采用变频控制将会节电30%左右。
近年来变频器作为商品在国内的销售呈逐年增长趋势,近几年市场保持12%~15%的增长率,超过了GTP的增长速度。
变频器的出现是微电子技术、电力电子技术、计算机技术和自动控制理论不断发展创新的产物。
它的问世使电气传动领域发生了深刻的技术革命。
变频器具有对交流电动机进行软起动、变频调速、提高运转精度、改变功率因数、过流、过压、过载保护等功能。
通过变频调速可以使控制系统节能、改善生产工艺流程、提高产品质量和易于实现自动控制,是目前最有发展前途的调速方式。
变频器早期仅仅用于速度控制,随着技术发展和社会对能源运用效率要求的日益提高,逐渐被用于节能领域。
它可以使得电动机及其拖动的负载在无需任何改动情况下,按照生产工艺要求调整转速输出,大大降低电动机功耗,实现系统高效运行目的。
目前,我国很多企业已将变频器用于带式输送机起动、调速控制、风机调速以及水泵调速,对节约电能,减少排放量做出积极贡献。
1.1 变频器发展趋势经过40年的发展,变频器的发展趋势呈现以下特点。
(1)智能化操作更加简便,有明显的工作状态显示,能够自诊断和故障防范,甚至可以进行部件自动转换。
能够利用互联网遥控监视,实现多台变频器按程序联动,组成优化的变频器综合管理控制系统。
(2)专门化针对性的制造专门化变频器,不仅有利于对电动机经济有效地控制,并且降低生产成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验报告
课程名称单片机原理及应用
专业班级
姓名
学号
电气与信息学院
和谐勤奋求是创新
实验教学考核和成绩评定办法
1.课内实验考核成绩,严格按照该课程教学大纲中明确规定的比重执行。
实验成绩不合格者,不能参加课程考试,待补做合格后方能参加考试。
2.单独设立的实验课考核按百分制评分,考核内容应包括基本理论、实验原理和实验。
3.实验考核内容包括:1)实验预习;2)实验过程(包括实验操作、实验记录和实验态度、表现);3)实验报告;权重分别为0.2 、0.4 、0.4;原则上根据上述三个方面进行综合评定。
学生未取得1)和2)项成绩时,第3)项成绩无效。
4.实验指导教师应严格按照考核内容分项给出评定成绩,并及时批改实验报告,给出综合成绩,反馈实验中出现的问题。
实验成绩在教师手册中有记载。
实验报告主要内容
一.实验目的
二.实验仪器及设备
三.实验原理
四.实验步骤
五.实验记录及原始记录
六.数据处理及结论
七.实验体会(可选项)
注:1. 为了节省纸张,保护环境,便于保管实验报告,统一采用A4纸,实验报告建议双面打印(正文采用宋体五号字)或手写,右侧装订。
2. 实验类别指验证、演示、综合、设计、创新(研究)、操作六种类型实验。
3. 验证性实验:是指为了使学生巩固课程基本理论知识而开设的强调演示和证明,注重实验结果(事
实、概念或理论)的实验。
4. 综合性实验:是指实验内容涉及本课程的综合知识或本课程相关的课程知识的实验。
5. 设计性实验:是指给定实验目的、要求和实验条件,由学生自行设计实验方案并加以实现的实验。