伸缩臂叉装车总体结构毕业设计
伸缩臂式叉车属具的设计2
图 3 载荷图
4 建立有限元模型
选用实体网格进行离散分网 , 建立的有限元模 型如图 4所示 , 共 15 069个单元 , 30 264个节点。
图 2 叉车的载荷曲线 ( a) 载荷中心距与载重量关系图 ( b) 取货起升高度与载重量关系图
(2) 属 具 的 自 重 力 由 SoildWorks建 模 得 到 。 臂架的自重力也可由 SoildWorks建模得到 。
图 1 叉车属具的三维模型
参照汽车起重机的臂架设计起重臂 , 臂架采 用薄钢板焊接成型 , 具有较强的抗扭刚度 , 构造 简单 , 维修方便 , 成本低 , 外形美观大方 。缩回 后可方便收藏于下节臂架内 , 节约空间 。
3 臂架的受力分析
该属具的起重量随幅度而变化 , 一般小幅度 时其起吊能力由臂架强度决定 , 而大幅度时由整 机的稳定性决定 。臂架所受的载荷有起升载荷 、 臂架重力 、惯性载荷及风载荷等 。
Cp′1 = Cp ( C + b) / ( C ′+ b) - [ (L0 + b) G′(Lc + b) G′] / ( C′+ b) /9 800
式中 Cp′1 ———属具的起升载荷 , t Cp ———原额定起重量 , t C ———原载荷中心距 , mm C′———换用属具后的载荷中心距 , mm G———货叉自重力 , N G′———属具自重力 , N L0 ———属具重心位置 , mm Lc ———货叉重心位置 , mm b———货叉垂直段前表面到门架中心线的纵 向水平距离 , mm
社 , 2007 3 韩刚华 , 王鹰 , 韩刚等. 圆管带式输送机托辊组压陷阻
力的理论分析. 起重运输机械 , 2002 (10) : 4—7
(汽车行业)QYU型汽车起重机吊臂及伸缩机构毕业设计说明书

参考文献 38
致
谢 40
附录壹中文翻译 附录二外文资料原文
前言
现今,随着工业建设和民用建设的飞速发展,汽车起重机已经成为水利、电 力、冶金、化工、港口装卸、国防建设及房屋建设必不可少的工程机械。正 确选用、维护和保养好汽车起重机,是保证施工进度、延长汽车起重机使用 寿命、保障安全生产的必须举措。
本文对 QY16U 型汽车起重机的吊臂伸缩机构的设计和计算方法做出阐 述。确定吊臂主要尺寸、质量参数,确定各部件、总成的相互位置关系,通 过各部件、总成位置关系,利用 Solidworks 完成 QY16U 汽车起重机吊臂伸 缩机构的三维实体装配模型,利用 Ansys 对结构件进行强度校核,对确定中、 小型汽车起重机的设计方案具有很强的现实意义。
1.2.1 广泛采用液压技术
由于液压传动具பைடு நூலகம்体积小、重量轻、结构紧凑、能实现无极调速、操纵 轻便、运转平稳和工作安全可靠等优点,近年来在国外各种类型的工程起重
机上得到了广泛应用。我国主要工程起重机生产厂的产品多是液压起重机, 包括 3t、5t、8t、12t、20t、65t、80t、125t 等吨级的伸缩臂式液压起重 机。国外液压起重机在品种和产量方面都有较大发展,特别是大吨级液压起 重机发展非常迅速,100t 之上大型伸缩臂式起重机已采用液压传动,中, 小吨位的起重机已普遍采用液压传动。随着液压技术的液压元件的发展,液 压起重机将会获得进壹步发展。
《2024年度伸缩臂叉装车行走系统优化分析与实验研究》范文

《伸缩臂叉装车行走系统优化分析与实验研究》篇一一、引言随着工程机械的快速发展,伸缩臂叉装车作为重要的物流搬运设备,其行走系统的性能直接关系到工作效率和作业安全。
因此,对伸缩臂叉装车行走系统进行优化分析与实验研究,对于提高设备的整体性能具有重要意义。
本文旨在分析伸缩臂叉装车行走系统的结构特点及性能问题,通过优化设计及实验研究,提高行走系统的动力性、稳定性和经济性。
二、伸缩臂叉装车行走系统结构与性能分析1. 结构特点伸缩臂叉装车行走系统主要由驱动系统、传动系统、行走机构和制动系统等组成。
其中,驱动系统提供动力,传动系统将动力传递给行走机构,实现车辆的行进与转向。
行走机构采用履带式结构,具有较好的地面适应性。
2. 性能问题在实际使用过程中,伸缩臂叉装车行走系统存在动力不足、稳定性差、油耗高等问题。
这些问题主要源于设计不合理、制造工艺落后、使用维护不当等方面。
三、行走系统优化设计1. 动力系统优化为提高动力性能,可采取增加发动机功率、优化传动比、改善燃油供应系统等措施。
同时,采用先进的电控技术,实现动力系统的智能调控。
2. 稳定性优化为提高稳定性,可对履带式行走机构的框架结构进行优化设计,增加支撑面积,降低接地比压。
同时,采用先进的控制算法,实现行驶过程中的动态稳定控制。
3. 经济性优化为降低油耗,可采取轻量化设计、优化液压系统、改进润滑系统等措施。
同时,通过智能管理系统实现油耗的实时监测与控制。
四、实验研究1. 实验方案为验证优化设计的有效性,本文设计了多组对比实验。
首先,对优化前后的行走系统进行性能测试,包括动力性能、稳定性、油耗等指标。
然后,通过实际工况下的使用情况,对比分析优化前后的效果。
2. 实验结果与分析实验结果表明,经过优化设计后,伸缩臂叉装车行走系统的动力性能得到显著提升,稳定性得到有效保障,油耗得到有效降低。
具体数据详见附录中的实验数据表。
五、结论与展望本文通过对伸缩臂叉装车行走系统的优化分析与实验研究,有效提高了设备的动力性、稳定性和经济性。
伸缩臂叉装机研究报告
伸缩臂叉装机研究报告伸缩臂叉装机研究报告伸缩臂叉装机是一种适合多种工程应用场合的施工工具,它的突出优势是能够应对不同的施工高度和深度,同时兼顾施工场地的不同要求。
伸缩臂叉装机在特定市场和工程领域有着广泛的应用,比如高配电线路巡检、屋顶维护和紧急救援等等。
本文对伸缩臂叉装机进行研究,探究其物理结构、工作原理和应用范围,并分析了当前市场上主要的产品以及竞争格局。
希望通过本文的分析和研究,能够加深大家对伸缩臂叉装机的认识和了解,同时推动该领域的技术进步和工程应用。
一、伸缩臂叉装机的物理结构伸缩臂叉装机由车身、起重臂、叉臂、电机、液压系统等组成。
其中,伸缩臂叉装机的车身是最为重要的组成部分,包含了操作及控制杆,发动机等重要元器件。
起重臂和叉臂是配合使用的,通过工程师的操作和控制来实现对物体的吊装和移动。
电动机、液压缸和泵为伸缩臂叉装机提供了高效而稳定的动力支持,强化了叉装机设备的装载和操作能力。
二、伸缩臂叉装机的工作原理伸缩臂叉装机的工作原理基于电机动力、液压机械传动和操作结构。
当操作员在车身上调节伸缩臂装配的臂展,此时通过液压支撑系统来掌握起重臂、叉臂呈现出的动作特征,从而实现对外物体的吊装、搬输。
伸缩臂的长度灵活性和臂展的控制是伸缩臂叉装机的关键技术,通过技术的改进和创新,不光方便了工程后期的施工和维修,同时也降低了运输、安装等成本。
三、伸缩臂叉装机的应用范围伸缩臂叉装机是一种多领域、多工种的货物搬运设备,主要应用于以下领域:1、电力行业:高压电线巡检、铁路施工等。
2、清洁行业:城市景区树木种植、草坪修剪和保洁等。
3、建筑行业:电梯维护、楼层施工和屋顶维护等。
4、其他领域:医疗救援、锅炉加水、公路维护等领域。
伸缩臂叉装机在现代工程生产领域广泛应用,为各行业的发展提供了动力支持。
四、当前市场竞争格局在伸缩臂叉装机市场方面,不同公司有自己的特点和竞争策略。
当前市场上已经涌现出了很多品牌和型号的伸缩臂叉装机,包括进口和国产机型。
伸缩臂式叉装车结构设计与工作性能研究开题报告
伸缩臂式叉装车结构设计与工作性能研究开题报告一、研究背景叉装车是一种广泛应用于物流、制造业、农业等领域中的物流运输设备。
叉装车通过液压系统实现货物的提升、运输、放置等功能,因此叉装车的结构和工作性能直接影响着运输效率和货物安全。
传统的叉装车一般采用单臂或双臂固定结构,不能适应不同操作环境和货物尺寸的需求。
而伸缩臂式叉装车则可以通过伸缩臂的伸缩,灵活地适应不同的操作环境和货物尺寸,提高了叉装车的灵活性和工作效率。
因此,本研究拟对伸缩臂式叉装车的结构设计和工作性能进行深入探究。
二、研究内容1. 伸缩臂式叉装车的结构设计伸缩臂式叉装车的伸缩臂结构设计是至关重要的,伸缩臂的伸缩长度和伸缩速度需要兼顾灵活性和安全性。
本研究将进行伸缩臂式叉装车结构设计的优化,包括材料选择、结构形式设计、伸缩臂伸长速度和调节方式等方面的研究。
2. 伸缩臂式叉装车的工作性能测试本研究将对伸缩臂式叉装车的工作性能进行测试,主要包括伸缩臂的承载能力、工作稳定性、操作效率等方面的评估。
通过测试数据的分析和比对,确定伸缩臂式叉装车工作性能的优缺点,为优化叉装车的工作性能提供参考依据。
三、研究方法本研究将采用多种研究方法,包括文献调研、数值模拟、实验测试等。
具体包括以下步骤:1. 对伸缩臂式叉装车的现有研究文献进行调研和综述,了解叉装车的发展历程和现有研究成果。
2. 基于有限元分析方法,对伸缩臂式叉装车的伸缩臂数值模拟,研究伸缩臂的结构形式和工作性能。
3. 进行伸缩臂式叉装车的承载能力、工作稳定性、操作效率等方面的实验测试,获取叉装车的工作性能指标。
四、预期研究成果通过本研究的开展,预期可以获得以下成果:1. 优化的伸缩臂式叉装车结构设计方案,提高叉装车适应不同操作环境和货物尺寸的能力。
2. 伸缩臂式叉装车工作性能的测试数据,较为全面地了解伸缩臂式叉装车的工作性能及其优缺点。
3. 本研究成果可为叉装车工程设计和生产提供参考依据,为提高叉装车的灵活性和工作效率提供技术支持。
《伸缩臂叉装车行走系统优化分析与实验研究》范文
《伸缩臂叉装车行走系统优化分析与实验研究》篇一一、引言随着现代物流和工程建设的快速发展,伸缩臂叉装车作为一种重要的装载和运输设备,其性能的优化显得尤为重要。
其中,行走系统作为叉装车的关键部分,其性能的优劣直接影响到叉装车的作业效率和安全性。
因此,本文旨在通过对伸缩臂叉装车行走系统的优化分析与实验研究,提升其作业效率和安全性。
二、伸缩臂叉装车行走系统概述伸缩臂叉装车的行走系统主要由驱动系统、转向系统和悬挂系统等部分组成。
驱动系统通过发动机的动力输出,驱动行走机构进行前进、后退等动作;转向系统则通过转向机构实现叉装车的左右转向;悬挂系统则起到缓冲和稳定的作用,保证叉装车在不平整的路面上稳定行驶。
三、行走系统优化分析1. 驱动系统优化驱动系统的优化主要从动力传输效率和燃油经济性两方面进行。
通过改进传动装置,如采用更高效的齿轮传动比和更先进的液压系统,可以提高动力传输效率。
同时,通过优化发动机的燃油供给系统和燃烧过程,可以降低燃油消耗,提高燃油经济性。
2. 转向系统优化转向系统的优化主要关注转向的灵活性和稳定性。
通过改进转向机构的结构和控制方式,如采用电子液压助力转向系统或电动助力转向系统,可以提高转向的灵活性和稳定性。
此外,通过优化转向系统的阻力矩和摩擦力等参数,可以减少转向时的能耗。
3. 悬挂系统优化悬挂系统的优化主要考虑如何提高叉装车在不平整路面上行驶的稳定性和舒适性。
通过改进悬挂装置的结构和参数,如采用刚柔并济的悬挂装置和合理的悬挂高度等,可以有效地吸收路面颠簸带来的冲击力,提高叉装车的稳定性和舒适性。
四、实验研究为了验证上述优化措施的有效性,我们进行了实验研究。
首先,我们分别对优化前后的驱动系统、转向系统和悬挂系统进行了性能测试。
测试结果表明,经过优化后,叉装车的动力传输效率、燃油经济性、转向灵活性和稳定性以及行驶稳定性都有了显著提高。
五、结论通过对伸缩臂叉装车行走系统的优化分析与实验研究,我们得出以下结论:1. 驱动系统的优化可以有效提高动力传输效率和燃油经济性;2. 转向系统的优化可以改善转向的灵活性和稳定性;3. 悬挂系统的优化可以有效地提高叉装车在不平整路面上行驶的稳定性和舒适性;4. 通过对行走系统的整体优化,可以显著提高伸缩臂叉装车的作业效率和安全性。
挖掘机伸缩臂结构设计
挖掘机伸缩臂结构设计一、引言挖掘机是一种常见的工程机械设备,在工程建设和土木工程中起到了重要的作用。
挖掘机的伸缩臂结构是其关键组成部分之一,直接影响挖掘机的工作效率和稳定性。
本文将对挖掘机伸缩臂结构进行设计,并详细分析其结构特点和优点。
二、挖掘机伸缩臂结构设计原则1.结构简单、紧凑,以提高挖掘机整体稳定性和可靠性;2.材料选用优质钢材,保证臂的强度和刚度;3.可调节伸缩长度,以适应不同的工作环境和作业需求;4.设计合理的液压缸和管路系统,以确保伸缩臂的灵活性和平稳性;5.防止挖掘过程中的振动和冲击,提高挖掘机的安全性。
三、挖掘机伸缩臂结构设计方案1.选用高强度钢材作为臂的主体结构,以保证其在工作过程中的强度和刚度,提高挖掘机的稳定性;3.伸缩臂的结构采用滑动设计,以便实现其伸缩功能,并通过液压缸控制其伸缩速度和力量;4.在伸缩臂的末端设置可更换的工具接口,以适应不同的作业需求;5.设计合理的液压管路系统,以确保伸缩臂的液压控制灵活、平稳;6.在臂的外部设置防护装置,防止挖掘过程中发生意外事故。
四、挖掘机伸缩臂结构的特点和优点1.结构简单紧凑,安装方便,不占用太多的空间;2.可实现无级调节伸缩长度,适应不同的工作环境和作业需求,提高工作效率;3.伸缩臂的液压控制灵活、平稳,能够精确控制伸缩速度和力量;4.伸缩臂的材料选用优质钢材,保证了其强度和刚度,提高了挖掘机的稳定性和可靠性;5.伸缩臂的防护装置可以有效防止挖掘过程中的振动和冲击,提高了挖掘机的安全性;6.伸缩臂的工具接口可更换,适应不同的作业需求,提高了挖掘机的灵活性。
五、结论本文通过对挖掘机伸缩臂结构的设计原则和设计方案的分析,总结出了挖掘机伸缩臂结构的特点和优点。
挖掘机伸缩臂结构的设计对于提高挖掘机的工作效率、稳定性和安全性具有重要意义。
在实际挖掘机的生产和应用中,应根据具体的作业需求和工作环境,合理设计挖掘机伸缩臂的结构。
机械毕业设计601堆垛机伸缩货叉设计
图书分类号:密级:毕业设计(论文) 堆垛机伸缩货叉设计Stacker Telescopic Fork Design学生姓名学院名称机电工程学院专业名称机械设计制造及其自动化指导教师6月02日摘要自动化立体仓库目前广泛应用于汽车、电子、医药、烟草、建材、邮电等许多行业,是实现物流系统合理化的关键,对加快物流速度、提高劳动生产率、降低生产成本都有重要意义。
其中堆垛机又是自动化立体仓库中最重要的搬运、起重、堆垛设备, 对立体仓库的出入库效率有重要影响。
本文将注重研究双伸位堆垛机,它的使用不仅减少巷道占地,而且还减少了堆垛机台数。
在相同面积条件下,大幅度提高了地面利用率和存取工作效率,同时能够为用户节约可观的投资。
由于双伸位堆垛机的这个独特优势,它已得到迅速推广,并具有很大的市场空间。
但与国外技术相比,目前我国堆垛机产品在技术参数、产品覆盖范围、技术稳定性和产业规模等方面均有差距。
因此,本设计课题将从堆垛机的最主要的部分——货叉展开研究,希望能进一步的提高堆垛机的工作效率及使用寿命。
双伸位堆垛机采用了多级双伸位货叉,通过行程倍增实行大距离伸出,实现巷道内单边双排货架存取货物,但由于货叉悬臂加长,导致力矩相应增加,控制货叉的下挠量成为技术关键,同时也是技术难题。
堆垛机伸缩货叉采用一种能使原动机动作行程增倍的双向驱动直线运动机构。
为此,在方案设计中选择链条链轮组成的传动机构。
根据货叉存物取货的双向伸缩行程要求,仅采用双层货叉行程增倍机构是不够的,还必须实现第3层货叉的行程增倍直线差动。
但由于货叉悬臂加长,导致力矩相应增加,因此需要通过严格的理论计算和实际中的经验来控制货叉的下挠量。
在这次设计过程中,将使用Pro/E建模,并进行运动仿真,其中主要建模的零件包括链轮、链条、齿轮、齿条、下叉、中叉、上叉等。
难点在于各尺寸的确定及配合,和链传动的运动仿真。
关键词:货叉;Pro/E;挠性;仿真AbstractAutomated Warehouse now widely have been used in automotive, electronic, pharmaceutical, tobacco, building materials, telecommunications and other industries,it is to achieve rationalization of the key logistics system, to accelerate the pace of logistics, improve labor productivity, lower production costs have important significance. One stacker warehouse automation is the most important of handling, lifting and stacking equipment, for the three-dimensional warehouse to have an important impact on the efficiency of storage, the paper will focus on extending double-stacker, which not only reduce the use of roadway Land, but also reduce the number of stacking machine, under the conditions in the same area, a substantial increase access and utilization of the ground work efficiency, while users can save considerable investment. Because of this unique advantage of the extended-stacker, it has been the rapid promotion, and has great market space. However, compared with foreign technology, China's Stacker products in the technical parameters, product coverage, technology steadily and technology industries in scale of the gap. Therefore, this issue will design the most important part - Fork study, hoping to further improve the efficiency of Stacker and life.Two-side-stacker adopted the multi-level two-side-Fork, through the implementation of the gap doubled to achieve within the roadway unilateral double shelf access of goods, but because fork cantilever longer, resulting in a corresponding increase in torque , under the control Fork torsion is not only a key technology, but also technical difficulties.Stacker telescopic Fork can adopt a program of action motivated by two-way drive times the linear motion agencies, to that end, in program design in the choice of the sprocket chain drive mechanism. According Fork of the pickup of two-way telescopic trip request, only a double-decker Fork journey times by institutions is not enough, we must also achieve the three-tier Fork trip times by linear differential. However, due to Fork cantilever longer, resulting in a corresponding increase in torque, it needs a rigorous theoretical and practical experience to the next control Fork of torsion.In the design process, it is using Pro / E modeling and simulation exercise, which mainly include the sprocket parts modeling, the chain, gears, rack, under the higher, middle, lower fork and so on, the difficulty lies in Identify and cope with the size, and chain drive the simulation.Key words:Fork Pro / E Flexible Simulation目录1.绪论 (1)1.1自动化立体仓库在国民经济中的重要地位及堆垛机的意义 (1)1.1.1自动化立体仓库 (1)1.1.2自动化立体仓库的重要地位 (1)1.1.3有轨巷道堆垛机的意义 (2)1.2课题研究的目的及意义 (3)1.3堆垛机及货叉的技术要求,研究内容 (3)2.自动化立体仓库设计 (5)2.1自动化立体仓库总体规划时需要考虑的问题 (5)2.2自动化立体仓库总体规划 (6)2.2.1高层货架 (6)2.2.2巷道堆垛机 (6)2.2.3输送系统 (6)2.2.4托盘(货箱) (6)2.2.5自动控制系统 (7)2.2.6库存信息管理系统 (7)2.3巷道堆垛机设计 (7)2.3.1设计思路 (7)2.3.2 控制系统结构 (10)2.3.3 速度控制 (11)2.3.4 位置确定 (11)3.货叉方案设计 (13)3.1液压传动 (13)3.1.1双杆活塞缸 (13)3.2机械传动 (15)3.2.1链传动 (15)3.2.2齿轮齿条传动 (15)4.零件设计 (18)4.1电动机、减速器的选择 (18)4.1.1电动机的选择 (18)4.1.2减速器的选择 (19)4.2货叉的力学计算 (21)4.2.1货叉弯矩的计算 (21)4.2.2堆垛机货叉强度的计算 (22)4.2.3货叉变形计算 (23)4.3链轮链条传动计算 (26)4.3.1链传动的优缺点 (26)4.3.2链条链轮的确定 (27)4.4单个螺栓联接的受力分析和强度计算 (30)4.4.1货叉没展开时 (30)4.4.2货叉展开时(极限位置) (31)5 零件建模仿真 (35)5.1Pro/E零件建模仿真 (35)5.1.1螺栓的设计过程 (35)5.1.2螺母制作过程 (38)5.2链条链轮的设计过程 (39)5.3零件的装配 (40)5.4链传动及总装图 (42)6. NC代码 (44)6.1NC代码简介 (44)6.2.中叉上的链条槽 (44)6.3.中叉上的孔 (52)结论 (56)致谢 (57)参考文献 (58)附录........................................................ 错误!未定义书签。
伸缩臂叉车工作装置设计
伸缩臂叉车工作装置设计摘要:由于高速伸缩臂叉车的工作装置属于悬臂伸缩作业,要满足叉装举升物资的需求,工作装置材料的选取及受力情况应该在设计阶段进行有限元模型分析,达到优化工作装置外形尺寸和自重的效果。
基于此,本文主要对伸缩臂叉车工作装置设计进行分析探讨。
关键词:伸缩臂叉车;工作装置;设计1、前言伸缩臂叉装车既具有普通叉车搬运物料的功能,又有臂架式起重机的特征,可配备多种作业属具,更有野外作业的能力。
伸缩臂叉装车具有可伸缩的臂式工作装置,是自行式作业机械,它将叉车、装载机、高空作业平台、小型起重机乃至农用拖拉机的功能集于一身,是一种多功能搬运、举升设备,是现在建筑业、工业、农牧业理想的多功能装卸搬运机具。
2、伸缩臂叉装车产品的总体设计2.1货叉平动机构的设计伸缩臂叉装车可以完成物资装卸载、吊装、堆码垛、集装箱装掏箱、高空或跨障碍输送、吊装等作业。
该车的多种作业是通过伸缩臂的变幅来实现的,但是在伸缩臂变幅的过程中,其前端货叉的水平角度也随之改变。
若在变幅的过程中不能一直保持货叉的水平状态,就会发生货物的滑落事故,因此货叉调平机构是该车是否能够保证顺利完成作业,并保证货物及人生安全的重要机构。
货叉调平的形式主要有两种方式,既电子调平和机械式调平。
电子调平方法,是在伸缩臂销轴和货叉销轴处设置若干个角度位移传感器,并与控制器和液压系统组成一个闭环控制系统,当伸缩臂变幅时,传感器采集角位移信息并传送至控制器,控制器根据该信息指令液压系统对货叉架翻转液压缸的缸杆或无杆腔进行补油,控制货叉架进行相应的调整,调整信息由货叉架销轴处的传感器采集并反馈到传感器,控制器计算比较两个销轴处的角位移信息,自动调整对翻转液压缸的补油流速,从而在伸缩臂变幅过程中使货叉时钟保持水平或者预先调定的角度。
该方法的有点是调平精度高,但是由于货叉主要在野外作业,作业环境恶劣,其可靠性和寿命存在问题,且成本较高,目前应用不多。
机械调平是根据液压补偿原理达到自动调平的目的。
TH4013SL型伸缩臂叉装车底盘结构设计与有限元分析

闰洪 峰 王 志 王伟 平 王英 锋 温 琦 张 辉 种 洋
中 国农 业机械 化 科 学研 究 院 北 京
摘
108 0 03
要 :以 T 41S H 03L型伸缩臂叉装车 的底盘结构 为研 究对 象 ,对其 进行了详细的结构设计 ,分析计算 了该
同时将车上载荷传递 到支腿或 车轮 ,使伸缩臂叉 装 车稳 定 地 支 承 在 地 面上 。 由于 承 受 了整 车 的重
力 和力 矩 ,其 局 部 的损 坏 以 局 部 结 构 的疲 劳 破 坏 为 主 。 因此 ,必 须 保 证 车 架 结 构 具 有 足 够 的强 度 与刚度 ,使 机构 配 置合 理 ,具 有 良好 的 力学 性 能 。 鉴 于伸 缩 臂 叉 装 车 工 作 环 境 的 恶 劣 性 和 复 杂 性 ,
—
63 —
伸 缩臂叉 装 车 的底 盘是 整 个 机 械 的 支 承部 分 , 它 承受 整 车 的 自重 及 各 工 况 条 件 下 负 载 的 重 力 ,
小箱体结构 1 。前桥左 右上弧板位置为车架抗弯 0
能力较 弱 的 区域 ,在 左 右 两 侧 各 设 1折 板 ,与 前
弧板 1 在 同一平 面上 的厚 度 为 2 m 的 4块 钢 2不 0m
侧驾 驶 室 、燃 油箱 等 总 重 为 G ,液 力 变 矩 器 及 传 动轴 等 总重 为 G ,配 重 为 G ,前 桥及 轮 胎 总成 重
量 为 G ,后 桥 及轮 胎 总 成重 量 为 G ,G =G ;伸 缩臂 及 负 载 对 车 架 施 加 的载 荷 有 :臂 架 与 车 架 铰 接 点 O处 沿 水 平 方 向 的 F 、竖 直 方 向 的 F 。;变
汽车起重机伸缩臂系统设计
毕业设计(论文)题目汽车起重机伸缩臂系统设计学生姓名肖文涛学号2006105334专业机械设计制造及自动化班级20061052指导教师谭宗柒评阅教师完成日期2010 年月日三峡大学学位论文原创性声明本人郑重声明:所呈交的学士学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果,除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果,对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本人拥有自主知识产权,没有抄袭、剽窃他人成果,由此造成的知识产权纠纷由本人负责。
学位论文作者签名:日期:2010-5-29学位论文版权使用受权书本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权省级优秀学士学位论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索‘可以采用影印、缩印或扫描等复制手段保存和汇编学位论文。
本学位论文属于:1、保密□,在年解密后适用本书授权。
2、不保密□。
(请在以上相应方框内打“√”)目录前言 (1)摘要 (2)1 绪论 (2)1.1国内外汽车起重机发展概况及趋势 (2)1.2伸缩臂结构发展现状 (4)1.3伸缩臂机构形式介绍 (6)1.4本课题内容及重要意义 (7)2 QAY50汽车起重机主要技术参数和工作级别 (7)2.1QAY50起重机主要技术参数 (7)2.2QAY50汽车起重机的工作级别 (9)3伸缩臂传动方案和臂架截面的确定 (12)3.1伸缩臂传动方案的确定 (12)3.2伸缩臂架截面的确定 (14)4伸缩臂设计计算 (17)4.1起重机伸缩臂尺寸的确定 (17)4.2臂架伸缩液压缸的计算及选择 (22)4.3伸缩臂受力计算 (25)5伸缩臂有限元分析 (31)5.1伸缩吊臂有限元模型建立 (32)5.2计算结果与分析 (34)总结 (37)致谢 (38)参考文献 (39)汽车起重机伸缩臂系统设计学生:肖文涛指导老师:谭宗柒三峡大学机械与材料学院摘要:臂架是起重机的主要承载构件。
毕业设计(论文)-机械手手臂前后伸缩机构设计(全套图纸)

摘要“机械手”(Mechanical Hand):多数是指附属于主机、程序固定的自动抓取、操作装置,如自动线、自动线的上、下料,加工中心的自动换刀的自动化装置。
实现了自动化生产方式,达到了减少劳动力、节约费用、提高工作效率、增加企业经济效益之目的。
本文设计的机械手手臂前后伸缩机构由电动机、丝杠螺母副、导杆、手臂、连接板等构成。
设计过程中,首先,调查了机械手研究现况,在此基础上根据设计技术要求选定了驱动机构及伸缩机构方案;接着,根据选定的结构方案对各主要零部件进行了设计与校核;最后,通过AutoCAD绘图软件绘制了该机械手手臂前后伸缩机构的装配图及主要零部件图。
通过本次设计,巩固了大学所学专业知识,如:机械原理、机械设计、材料力学、公差与互换性理论、机械制图等;掌握了普通机械产品的设计方法并能够熟练使用AutoCAD软件,本次机械手臂的设计代表了设计的一般过程,对今后的设计工作有一定的参考价值。
关键词:机械手;手臂;伸缩;设计Abstract"Robot" (mechanical hand): most of the refers to attach belongs to the host program fixed automatic crawl, operation device, such as automatic assembly line, automatic line, cutting, machining center automatically change knife automatic device. The realization of automatic production, to reduce labor, save costs, improve work efficiency, increase the economic efficiency of the purpose of the enterprise.In this paper, the manipulator and the front and back telescopic mechanism of the manipulator is composed of a motor, a lead screw nut pair, a guide rod, an arm, a connecting plate, and the like. In the design process, firstly, to investigate the status of the research of manipulator, based on the driving mechanism and the telescopic mechanism scheme is selected according to design requirements; then, based on the se lected structure of the main parts were designed and checked. Finally, through the AutoCAD drawing software drawn before and after the manipulator arm telescopic mechanism assembly and major parts of the map.Through the design, the consolidation of the University of the professional knowledge, such as: mechanical principles, mechanical design, mechanics of materials, tolerance and interchangeability theories, mechanical drawing, and master the design method of general machinery products and be able to skillfully use AutoCAD software, the design of the mechanical arm represents the general process of design, have certain reference value for the design work in the future.Key words: manipulator; arm; expansion; design目录摘要 (I)Abstract (II)第1章绪论 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (1)第2章总体方案设计 (3)2.1设计要求 (3)2.2方案设计 (3)2.2.1驱动机构 (3)2.2.2伸缩机构 (3)2.2.3总体方案 (4)第3章设计计算 (5)3.1手臂伸缩驱动力计算 (5)3.1.1 手臂摩擦力的分析与计算 (5)3.1.2手臂密封处的摩擦阻力的计算 (6)3.1.3手臂惯性力的计算 (6)3.2电机的选择 (7)3.2.1 扭矩的计算 (7)3.2.2 启动矩频特性校核 (8)3.3丝杠螺母的选择与计算 (8)3.3.1丝杠螺母副支承方式选择 (8)3.3.2确定滚珠丝杠副的导程 (9)3.3.3强度计算 (10)3.3.4螺母选择 (12)3.4联轴器的选用 (12)3.5轴承及键的选用与校核 (13)3.5.1轴承 (13)3.5.2键 (13)3.6手臂设计与校核 (14)3.6.1导向装置 (14)3.6.2平衡装置 (14)3.6.3尺寸设计 (14)3.6.4尺寸校核 (15)结论 (16)参考文献 (17)致谢 (18)第1章绪论1.1研究背景及意义机械手具有许多人类无法比拟的优点,满足了社会化大生产的需要,其主要优点如下:(1)能代替人从事危险、有害的操作。
新型伸缩臂叉装车电控系统设计
R . ( % ’ + & 1 % ’ & . # # % ( 0? ( # + 1& /1 ( 2/ & ’ Q . + / % , ( $ + . (2 + % $ % ( . ( # & + -L & & 0 K 3 )
$<2 $ $ $ C 1 D (< 5 . $ ; 5 ( )0 + , ) 3 6E 3 . $ T 5 . 0 12 ( )1 F , # 2 MB 3 . $ F -
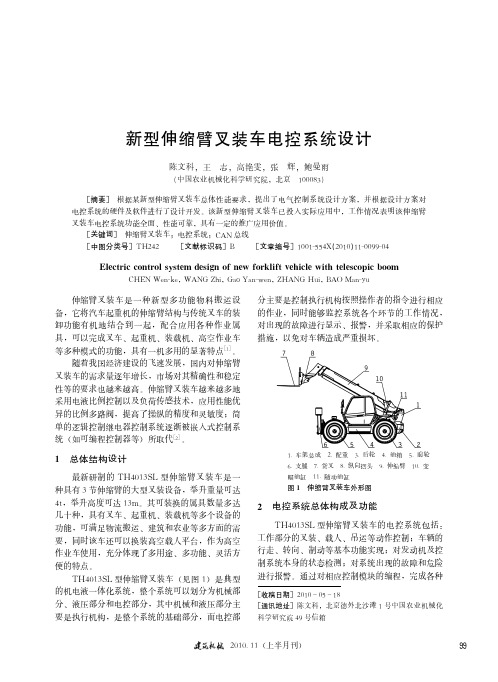
伸缩臂 叉 装 车 是 一种 新 型多功能 物 料 搬 运 设 备$它将汽车起重机的伸缩臂结构与传统叉车的装 卸功能有机地结 合 到 一起$ 配 合应 用 各 种作业 属 具$可以完成叉车#起重机#装载机#高空作业车 等多种模式的功能$具有一机多用的显著特点 % 随着我国经济建设的飞速发展$国内对伸缩臂 叉装车的需求量逐年增长$市场对其精确性和稳定 性等的要求也越来越高%伸缩臂叉装车越来越多地 采用电液比例控制以及负荷传感技术$应用性能优 异的比例多路阀$提高了操纵的精度和灵敏度&简 单的逻辑控制继电器控制系统逐渐被嵌入式控制系
* ! 统 ! 如可编程控制器等"所取代) % ) * #
分主要是控制执行机构按照操作者的指令进行相应 的作业$同时能够 监 控 系统 各 个 环 节 的工作 情况$ 对出现的故障进行显示#报警$并采取相应的保护 措施$以免对车辆造成严重损坏%
4 !总体结构设计
最新研制 的 !1 ) " # ( * ? 型 伸缩 臂 叉 装 车 是 一 种具有(节伸缩臂的大型叉装设备$举升重量可达 $举 升 高 度 可 达 # ) 7 ( 9%其可装换的属 具 数量 多 达 几十种$具有叉车#起重机#装载机等多个设备的 功能$可满足物流搬运#建筑和农业等多方面的需 要$同时该车还可以换装高空载人平台$作为高空 作业车使用$充分体现了多用途#多功能#灵活方 便的特点% 见图# "是典型 !1 ) " # ( * ? 型伸缩臂叉装 车 ! 的机电液一体化系统$整个系统可以划分为机械部 分#液压部分和电控部分$其中机械和液压部分主 要是执行机构$是整个系统的基础部分$而电控部
伸缩臂叉车工作装置设计

伸缩臂叉车工作装置设计
本课题是企业根据市场对于对高举升、大卸距、一机多能的装载机械日趋迫切的需求而进行的产品研发项目。
要求产品达到国外同类产品的性能水平。
考虑到伸缩臂叉车须达到额定的载荷、较大的变幅角度、较大的作业幅度、各种复杂的作业环境以及伸缩臂叉车所必须满足的安全性能,需在设计中对伸缩臂叉车作业装置进行严谨的设计计算以满足产品的使用性能。
论文主要内容如下:1.简要介绍伸缩臂叉车的用途、国内外伸缩臂叉车发展状况、及其发展前景,同时对臂架结构和工作原理进行说明,为伸缩臂叉车工作装置设计做铺垫。
2.应用质量屋工具将用户的需求转换为产品技术需求,得到零部件的技术性能指标,并以此为参照进行总体设计,包括整体布局规划、作业范围计算、核心零部件选型,以及确定电气、液压、传动系统的设计思路。
3.伸缩臂叉车工作装置详细设计,包括货叉和臂架结构设计、臂架强度、刚度和稳定性计算、货叉平动功能设计、整机稳定性校核计算等。
4.采用Pro/E软件中的TOP-DOWN设计方法,实现伸缩臂叉车的三维实体造型设计、虚拟装配和干涉检验,并将三维模型转换为二维工程图。
使用Mechanica 模块,对伸缩臂进行有限元分析,找出薄弱环节,做出改进设计。
通过产品试制后,该产品完全达到了预期目标,性能完善且工作可靠,具有良好的市场潜力和推广应用价值。
机械毕业设计1224汽车起重机伸缩臂系统设计

毕业设计(论文)题目汽车起重机伸缩臂系统设计目录前言 (1)摘要 (2)1 绪论 (2)1.1国内外汽车起重机发展概况及趋势 (2)1.2伸缩臂结构发展现状 (4)1.3伸缩臂机构形式介绍 (6)1.4本课题内容及重要意义 (7)2 QAY50汽车起重机主要技术参数和工作级别 (7)2.1QAY50起重机主要技术参数 (7)2.2QAY50汽车起重机的工作级别 (9)3伸缩臂传动方案和臂架截面的确定 (12)3.1伸缩臂传动方案的确定 (12)3.2伸缩臂架截面的确定 (14)4伸缩臂设计计算 (17)4.1起重机伸缩臂尺寸的确定 (17)4.2臂架伸缩液压缸的计算及选择 (22)4.3伸缩臂受力计算 (25)5伸缩臂有限元分析 (31)5.1伸缩吊臂有限元模型建立 (32)5.2计算结果与分析 (34)总结 (37)致谢 (38)参考文献 (39)汽车起重机伸缩臂系统设计摘要:臂架是起重机的主要承载构件。
起重机通过臂架直接吊载,实现大的作业高度与幅度。
臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。
所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。
本文主要根据QAY50吨汽车起重机工作要求来确定伸缩机构的结构和传动方案,进而采用传统的设计方法对主臂的三铰点、主臂的长度、及每节臂的长度、臂架的结构、液压缸尺寸进行确定,对臂架进行受力分析,利用有限元对臂架进行分析。
关键词:伸缩臂;液压缸;臂架结构,有限元分析Design of truck crane Telescopic boom systemAbstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Mainly based on XCMG truck crane 50 tons of requests to determine the structure and transmission expansion program, and then using the traditional design method is the main arm of the three nodes, the main arm length, arm length, and each section, Boom structure, determine the size of hydraulic cylinders.Keywords:Telescopic boom; hydraulic cylinder; Structure of boom ;ansys前言近年来,随着社会的发展,社会生活中对起重机的需求越来越大,但是,与国外汽车起重机相比,国外汽车起重机技术得到了飞速发展,所以国内起重机的研发越来越紧迫。
伸缩臂叉装车总体结构毕业设计

伸缩臂叉装车总体结构毕业设计伸缩臂叉装车总体结构设计摘要:伸缩臂叉装车已成为高空作业设备的重要门类,是广泛应用于建筑工地、工矿企业仓库和其他工地上起升、运输、堆放砖头、木材、钢材和其他物料的一种起重运输设备,随着经济建设的发展,对其需求越来越大,对其性能的要求也越来越高。
本文主要任务是完成对伸缩臂叉装车的总体计算、整体布局、臂架结构设计及其有限元分析。
本文主要内容:⑴介绍伸缩臂叉装车的用途、国内外伸缩臂叉装车发展状况的比较、及其发展前景。
同时对臂架的结构和工作原理做了简要介绍。
⑵完成对关键铰点的布置,作业高度、作业幅度的计算,及整机稳定性的校核计算。
并绘制出整机总体布局图。
⑶臂架的结构设计,臂架的强度、刚度和稳定性计算,并用ANSYS软件进行臂架有限元分析。
同时完成臂架系统装配图,一节臂、二节臂的装配图和相关零部件的工程图。
⑷设计过程采用Pro/E软件进行三维实体建模,并进行装配,最后应用其工程图模块转化为二维工程图。
本次设计的伸缩臂叉装车参考了JCB公司的JCB530型号伸缩臂叉装车的外形尺寸,并且严格按照《起重机金属结构》、《BS_EN_1459-1999》和《机械设计手册》等相关设计规范进行设计,其性能和质量满足相关要求。
关键词:伸缩臂叉装车;稳定性;臂架;有限元分析The Frame Structure Design of TelehandlerAbstract:Telehandler is a kind of hoisting equipment which is widely used in building site、storage and other place to lift、transport、stack the tile 、wood 、steel products and other materiel . Along with the development of economic in our country, the requirement of crawler crane is larger and larger, andthe request of the capability is higher and higher.the mission of this paper is to complete the frame structure design of telehandler、the design of boom structure and the finite analysis of boom.The primary contents in this paper can be concluded as follows:The use of the telehandler、the telehandler’s development comparison domestic with abroad、and the development trend of the telehandler are introduced.At the same time,the paper introduces the structure of boom and how boom works, and gives the principle of how to choose the boom.The pivot points arrangment , the calculation of lift height and forward reach, and the calculation of the stability are completed.The integral layout drawing is provided.The structure design of the boom, the calculation of the strength and stability of the boom system are accomplished and the finite analys of boom is achieved by ANSYS software. While at the same time planar engineering drawing must be done, such as the assembling of the boom system, the boom one the boom two and the related parts.I use the Pro-E software to design the 3D entity, and make dummy assembly. And then, the 3D entity is transformed to the planar engineering drawing with the Pro/E planar engineering drawing module.In the design process, I refer to the JCB530 telehandler of JCB, and accord to the《Crane Metal Stuctrure》、《BS_EN_1459-1999》and the《Machine Design Handbook》strictly. Its capability and quality meet the requirement.Key Words:Telehandler;Stability;Boom;The Finite element analysis目录摘要 .......................................................................................................................... .. (I)ABSTRACT ......................................................................................................... ....................................................... II 绪论 (1)1伸缩臂叉装车概述 (1)1.1 伸缩臂叉装车简介 (1)1.2 国外伸缩臂叉装车发展状况 (1)1.3 国内伸缩臂叉装车发展状况 (2)1.4 国内伸缩臂叉装车的前景及发展趋势 (2)1.5 国内、外相关标准 (3)第一章毕业设计任务书 (4)1题目来源:实际应用 (4)2设计要求和设计参数 (4)2.1设计要求: (4)2.2设计参数: (4)3个人重点工作 (5)4各阶段时间安排 (5)5应阅读的资料及主要参考文献目录 (5)第二章毕业设计计算说明书 (5)1设计参数及整机尺寸 (5)1.1 设计参数 (6)1.2 整机尺寸 (6)2重要铰点布置及其计算 (7)3作业高度H计算 (8)4幅度R计算 (9)5整机稳定性计算 (9)5.1 整体稳定性计算工况和载荷 (9)5.2 整体稳定性结果汇总 (11)6臂架结构设计及其计算 (12)6.1 臂架结构设计 (12)6.2 臂架理论计算 (12)6.2.1 臂架全伸,仰角62时刚度、强度计算 (13)6.2.2臂架全伸,仰角0度时刚度、强度、稳定性计算 (24)6.3 各臂节支反力计算 (26)6.3.1 对臂架整体受力分析 (26)6.3.2 伸臂时各臂节支反力计算 (27)6.3.3 缩臂时各臂节支反力及缩臂链拉力 (29)第三章:标准化审验报告 (30)1技术分析 (30)2结论 (30)参考文献 (32)致谢 (33)绪论1 伸缩臂叉装车概述1.1 伸缩臂叉装车简介在高空作业类小型机械中,主要有高空作业平台、伸缩臂叉装车等种类。
叉车快速装卸伸缩起重臂的设计
圈 3
圈 2
l 安 装轴
4 开 T 2销
2 目定板
5 固定 轴
3 .下 压扳
6 联 接扳
4 .2起 重 臂 的 安 装 中 心 位 置 应 与 货 叉 架 的
中心一致 ,以避免起 重臂安 装过偏 影响叉 车
工 作 的稳 定 性 。
3 载 荷 特 性
伸 缩起 重 臂属 一 般 叉 车 属 具 ,在 使 用 过
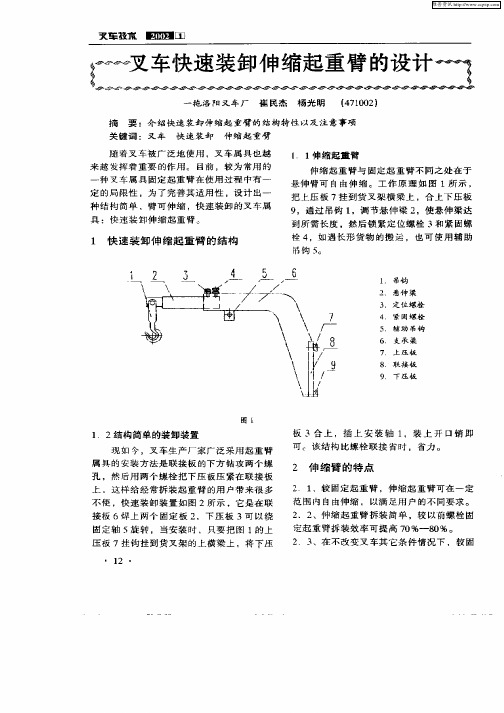
吊钩 5
1 吊 钧 .
2 悬 伸 粱 .
3 定 位 螺拴 . 4 紧 固螺拴 5 辅 助 吊 钩 6 支 承 粱
7 上 压板
8 联 接 板
9 下 压板
设 计
一
1 2结 构 简 单 的 装 卸 装 置
图 I
板 3合 上 ,插 上 安 装 轴 1 ,装 上 开 [ 销 即 2 1
成 ,材 料 选 取 方 便 ,强 度 高 ,成 本 低 。
超负载工作 。
二 二_ [ - 二
r
7
Og ?Lg OK 趵U U , 2o O0 10 50 10 00 50 0
_
,/Biblioteka !0 18 16 14 12 10 08 . . . . . . .m
可 该 结 构 比螺 栓 联 接 省 时 ,省 力 。
现 如 今 ,叉 车 生 产 厂 家 广 泛 采 用 起 重臂
属 具 的 安装 方 法是 联 接 板 的下 方 钻 攻 两 个螺
孔 ,然 后 用 两 个螺 栓 把 下 压 板 压 紧 在 联 接板 上 , 这 样 给 经 常拆 装 起 重 臂 的用 户 带 来 很 多 不 便 ,快 速 装 卸 装 置 如 图 2所 示 ,它 是 在 联
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:伸缩臂叉装车已成为高空作业设备的重要门类,是广泛应用于建筑工地、工矿企业仓库和其他工地上起升、运输、堆放砖头、木材、钢材和其他物料的一种起重运输设备,随着经济建设的发展,对其需求越来越大,对其性能的要求也越来越高。本文主要任务是完成对伸缩臂叉装车的总体计算、整体布局、臂架结构设计及其有限元分析。
Key Words:Telehandler;Stability;Boom;The Finite element analysis
绪论
1伸缩臂叉装车概述
1.1伸缩臂叉装车简介
在高空作业类小型机械中,主要有高空作业平台、伸缩臂叉装车等种类。
伸缩臂叉装车按结构型式主要分为回转式和非回转式,本文主要阐述非回转式伸缩臂叉装车。非回转式伸缩臂叉装车的结构分为上车和下车。上车主要包括臂架、连接装置、调平装置、附属装置等。下车主要包括驾驶室、底盘、发动机等。传统叉车的起升部分是立式门架,货叉主要沿垂直方向完成叉装、起升作业。起升高度受门架高度限制,主要用于货物装卸与转运作业。伸缩臂叉装车在叉装与起升作业方面与传统叉车相类似,其与传统叉车的不同之处是具有伸缩臂,伸缩臂和驾驶室置于两侧;伸缩臂可使货叉在水平方向前后伸缩、上下运动;臂架头部可配置多种附属装置,完成多种作业。伸缩臂叉装车主要功能有叉装运输、挖掘、抓铲、起升吊装、工作平台、清扫作业等。
In the design process, Irefer tothe JCB530 telehandler of JCB,andaccord to the《Crane Metal Stuctrure》、《BS_EN_1459-1999》and the《Machine Design Handbook》strictly. Its capability and quality meet therequirement.
The structure design of the boom, the calculation of the strength and stability of the boom system areaccomplished and the finite analys of boom is achieved by ANSYS software. While at the same time planarengineeringdrawing must be done, such as the assembling of the boom system, the boom onethe boom two and the related parts.
I use the Pro-E software to design the 3D entity, and makedummyassembly. Andthen,the 3D entity is transformed to the planar engineering drawing with the Pro/E planar engineering drawing module.
Theprimarycontents in this papercan be concluded as follows:
The use of the telehandler、the telehandler’s development comparisondomestic with abroad、and the development trend of the telehandler are introduced.At the same time,the paperintroduces the structure of boom and how boom works, and gives the principle of how to choos软件进行三维实体建模,并进行装配,最后应用其工程图模块转化为二维工程图。
本次设计的伸缩臂叉装车参考了JCB公司的JCB530型号伸缩臂叉装车的外形尺寸,并且严格按照《起重机金属结构》、《BS_EN_1459-1999》和《机械设计手册》等相关设计规范进行设计,其性能和质量满足相关要求。
本文主要内容:
⑴介绍伸缩臂叉装车的用途、国内外伸缩臂叉装车发展状况的比较、及其发展前景。同时对臂架的结构和工作原理做了简要介绍。
⑵完成对关键铰点的布置,作业高度、作业幅度的计算,及整机稳定性的校核计算。并绘制出整机总体布局图。
⑶臂架的结构设计,臂架的强度、刚度和稳定性计算,并用ANSYS软件进行臂架有限元分析。同时完成臂架系统装配图,一节臂、二节臂的装配图和相关零部件的工程图。
关键词:伸缩臂叉装车;稳定性;臂架;有限元分析
TheFrame Structure DesignofTelehandler
Abstract:Telehandler is a kind of hoisting equipment which is widely used inbuilding site、storageand other place to lift、transport、stack the tile、wood、steel products and other materiel . Along with the development ofeconomicin our country, therequirementof crawler crane is larger and larger, and the request of the capability is higher and higher.the mission of this paper is tocompletetheframe structure design oftelehandler、the design of boomstructure and the finite analysisof boom.
The pivot points arrangment , the calculation of lift height and forward reach, and the calculation of the stability are completed.The integral layout drawing is provided.