距离选通技术对后向散射抑制作用的理论分析
一种应用距离选通成像技术的微光望远镜
一种应用距离选通成像技术的微光望远镜张跃民;刘晓莉;陈洲;赵路民;张红;张金涛【摘要】利用红外波长的激光对微光系统进行辅助照明,改善目标区域的环境照度和对比度,使目标从视场中凸显出来,提高微光系统的探测距离,改善观察效果.采用距离选通技术,合理匹配激光脉冲与选通像增强器的工作时序,屏蔽目标前后非目标反射光以及来自大气中悬浮微粒产生的杂散光干扰,解决同轴照明后向散射问题,达到只观察选定距离内目标的目的.通过微光选通望远镜的工程实践,将激光距离选通技术成功地运用于微光探测领域中,在无月星光,照度为1×10-3 lx,大气能见度为10 km条件下,对中型坦克或卡车侧面目标的识别距离可达到1 400m.%Under the help of auxiliary lighting on low-light level system by using laser with infrared wavelength,environmental illumination and contrast of object area can be improved,making the object outstand from vision area,which can effectively enlarge the range of lowlight detection and improve the observation effects.Adopting range gating technology,properly arranging the work order between laser pulse and gated image intensifier,shielding the object from troubling by inflected light around the object and stray light from airborne suspended particulates,solving coaxial illumination back scattering problem,the object only from the selected range can be observed.Through engineering practices of laser assistant low-light level binoculars,the range gating technology is successfully applied to low-light detecting area,and the recognizable range for medium tank and the truck broadside is up to 1 400 m under simple background conditions,withoutmoonlight or starlight,with illumination of 1 × 10-3lx and atmosphere visibility of 10 km.【期刊名称】《应用光学》【年(卷),期】2013(034)004【总页数】5页(P667-671)【关键词】激光照明;微光选通望远镜;距离选通;后向散射【作者】张跃民;刘晓莉;陈洲;赵路民;张红;张金涛【作者单位】河南平原光电有限公司,河南焦作454001;焦作大学机电工程学院,河南焦作454000;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001;河南平原光电有限公司,河南焦作454001【正文语种】中文【中图分类】TN249引言微光望远镜主要用于夜间观察、搜索目标,可利用镜内分划观测炸点位置,修正射击偏差,同时也可作为夜间侦察、监控装备使用。
基于激光距离选通成像的非视域成像理论与方法研究共3篇
基于激光距离选通成像的非视域成像理论与方法研究共3篇基于激光距离选通成像的非视域成像理论与方法研究1基于激光距离选通成像的非视域成像理论与方法研究随着科学技术的不断发展,人们对于可见光成像的要求越来越高,同时也对非视域成像技术的研究和应用提出了更高的要求。
基于激光距离选通成像的非视域成像理论与方法就是其中的一项重要的研究方向。
本文将着重探讨这一主题,从理论和方法角度入手,对其进行全面深入的探究。
激光距离选通成像的非视域成像技术是一种将目标障碍物周围的光线进行探测并计算距离,从而在非视域上实现对物体的成像的技术。
激光距离选通技术是其实现的基础,它借助于时间分辨率较高的激光传感器来探测物体周围反射回来的光线,并计算出物体和传感器之间的距离。
非视域成像技术则借助于计算机对所获取的光线信息加工处理,提取出目标物体的空间位置信息,并生成物体的三维模型。
本文将从两个方面进行讨论:基于激光距离选通成像的非视域成像理论和基于激光距离选通成像的非视域成像方法。
一、基于激光距离选通成像的非视域成像理论1、成像模型。
非视域成像模型是激光距离选通成像技术的重要理论基础,它描述了传感器在非视域环境下如何产生光线反射信号,以及如何通过信号在计算机中进行重构和成像。
建立成像模型的主要目的是为了预测物体的和传感器之间的关系(包括距离、角度等),以实现对目标的精确成像。
2、成像算法。
成像算法是非视域成像的关键技术之一。
常用的成像算法包括光线追踪算法、时间反演算法、结构光法、光场重建算法等。
不同的算法有着不同的优缺点,适用于不同的成像场景。
二、基于激光距离选通成像的非视域成像方法1、补偿算法。
由于激光选通成像技术对环境光线的干扰比较敏感,会导致数据上的伪影,从而影响成像质量。
因此,在非视域成像技术应用中,往往需要采用一些补偿算法来降低这种干扰。
目前,在这一领域内,已经发展出了一系列的补偿算法,包括多帧的同步标准反射光算法、时域特征提取算法、多参考面算法等。
激光距离选通成像可视空间深度实验分析
Ex p e r i me n t a l a n a l y s i s o f v i s u a l s p a t i a l d e p t h o f l a s e r r a n g e - g a t e d i ma g i ng
摘 要 :距 离选通 激 光主 动成像 可在 能 见度 受 限条件 下有 效 克服 大气后 向散 射 和 背景干 扰 ,得 到被
观 测 目标 的 高对 比度 图像 。可视 空 间深度 能够体 现 实际成像 的景 物 范 围 ,对评 价 图像 质 量 和其 所在
的 空 间位 置具 有 重要 意 义 。 阐述 了距 离选通 成像 技 术 高速 门控 成像 的原 理及 关键 器件 的 选 型要 求 ,
第4 2卷 第 S 2期
VO 1 . 4 2 No . S 2
红 外 与 激 光 工 程
I n f r a r e d a n d La s e r En g i n e e r i n g
2 0 1 3年 l 2月
De c . 2 0 1 3
激 光 距 离 选 通 成 像 可 视 空 间深 度 实验 分 析
初 士 博 . - , 盖志ቤተ መጻሕፍቲ ባይዱ 1 , 2赵 杰 . - , 周 扬 , - , 杨俊贤 1 , 2 ( 1 .山 东省 海 洋环境 监测技 术 重 点 实验 室 , 山东 青 岛 2 6 6 0 0 1 ;
2 . 山东省科学院海洋仪器仪表研究所, 山东 青 岛 2 6 6 0 0 1 )
激光主动照明光学系统设计

D 4 0 0μ m , N A= 0 2 2 , 其内部包含的模数非常 1= 大, 其出射光完全可以用几何光学近似处理。所 以在此种情况下, 光纤完全可以实现对激光光束 的匀光处理。 鉴于跟踪测量系统所选用探测相机的波段需 要, 所选用半导体激光器功率为 0 5 0W 连续线 性可调, 工作波段为( 8 0 8ʃ 3 )n m , 并支持远端自 动控制。 2 5k m 不同远近处目标, 系统 为保证对 0 的照明区域均为直径为 1 0m的圆形区域, 激光光 源经照明光学系统后其发散角度 θ应为 2m r a d ( 5k m ) 5 0m r a d ( 0 2k m ) 可调。系统的最小发 散角度 θ 共同确 5k m由光纤直径 D 1与系统焦距 f
1 4 ] 和E l v i s s 激光主动成像系统等 [ 。同时, 国内外
对激光主动照明技术的研究主要集中在距离选通 技术及探测距离等领域, 并未对不同照明距离处 照明亮度的一致性及均匀性的问题进行分析, 而 从目前激光主动成像系统来看, 存在目标照度不 均匀及照度动态范围过大的问题
[ 1 4 ]
激光光源直接输出的光功率密度为高斯分 布, 需要进行匀光处理, 使用传统光棒匀光混合效 果不佳, 且光功率损耗比较大。光纤具有可弯曲、 可多光纤合束、 可长距离传输、 光功率损耗低等诸 多优点, 故选取光纤作为激光混光和中继传输器
1 4 ] 件[ 。本文采 用 多 模 石 英 光 纤, 纤芯直径径为
D e s i g no f l a s e ra c t i v ei l l u mi n a t i o no p t i c a l s y s t e m
L I UT a o ,H UY u e ,D O N GJ i a n ,S H E NJ u n l i
激光主动照明成像技术_分析和实验证明_王智
后向散射和目标反射的总功率 , 反映了后向散射的
影响 。如果需要研究后向散射对目标识别的影响 , 还
必须考虑望远镜焦平面的成像设备 , 本实验的接收
装置为 CCD 摄像机 , 还必须知道散射体和目标在探
测器对应像元上的辐射功率 , 从而可以对后向散射
引起的 辐射背景 对目标照 明的影 响加 以分析 。设
φ)
loi I
oi
+τ
i
e-2
βl
ex
l6
S i(l )dl
(10)
我们通过对 ηi 的分析 , 可以看出大气的后向散射对 目标照明的影响程度 。当 ηi >1 时 , 后向散射干扰已 经淹没了目标 , 即噪声大于有用的信号 , 通常取 η0i =1 为临界影响系数 。
1.2 成像系统组成
激光主动照明成像系统由以下几个部分组成 : 激光发射装置 ;激光接收望远镜 ;数据采集 、处理和 输出显示系统 。图 2 所示是激光主动照明成像系统 的示意图 。目前在国防科技中应用较广泛的激光波 段有两个 :钇铝石榴石(Y AG)激光的 1.06 μm 和二氧 化碳(CO2)激光的 10.6 μm , 前者主要用于激光测距
传输的目的 。随着激光成像技术的研究 , 成像距离 越来越远 , 使用领域越来越宽 。 不仅在军事上用于 侦察 , 还用于海岸巡逻 , 海上搜索和救援 , 安全部 门用于对可疑分子监视 。
1 激光主动照明成像系统分析
对于短距离范围的主动成像系统设计是相当简 单的 , 激光器工作于光斑模式 , 光照明于整个探测 器焦平面阵列的可视实时域 。接收器产生可连接电 视系统的图像序列 。这种系统有以下好处 :(1)简 单 ;(2)在场景中 , 能允许实时地观察运动物体和 运输工具 。 对于更长的距离 , 由于受大气的干扰 , 连续的散粒噪声影响 , 雾气的后向反 射等限制因 素 , 工作在这种模式下是不可能的 。 往往需要多次 曝光和处理来产生整个景像的单帧图像 。 在这种情 况下 , 获取整个景像的完整图像所需要的时间和图 像保真度之间应该有一个平衡 。
【精选】水下目标搜索与识别技术
水下目标搜索与识别技术水下目标搜索与识别系统一般分为光视觉系统和声视觉系统,当距离物体十米以内,一般采用光视觉系统,当距离物体大于十米以上时则用声视觉系统。
当前流行的趋势是采用激光的方式来进行目标搜索与识别。
一.光视觉系统传统的光视觉系统包括水下摄像机、照明等设备用来满足获取光学图像和视频信息等基本的要求。
而现在的光视觉系统不仅要求满足上述要求,还要求具备对图像和视频信息进行处理、特征提取以及分类识别的功能。
总之,只能水下机器人中光视觉系统的使命是:快速、准确德获取水下目标的相关信息,并对信息进行实时处理,将处理结果反馈给计算机,从而指导机器人进行正确的作业。
1.光视觉系统框架水下光视觉系统主要分为三大块:(1)底层模块:图像采集系统,包括专用水下CCD感光摄像头和图像采集卡,这部分属于硬件部分;(2)中层模块:图像处理,包括图像预处理、图像分割、特征提取、根据目标模型进行学习,形成知识库和逻辑推理机制,得到单幅图像的初步理解和评价。
(3)高层模块:分类是水下目标识别最为核心的技术,也是最终实现部分。
1.1硬件组成光视觉系统硬件包括光视觉计算机、水下CCD摄像头、云台和辅助照明灯。
光视觉计算机完成视觉建模、高层视觉信息处理和理解、与机器人主控计算机的网络通讯,实时监控系统每个时间节拍的运行状态与处理参数。
1.2软件体系水下光视觉系统的软件体系涵盖了两个部分:中层模块和高层模块。
中层模块主要负责图像处理工作(图像处理一般包括图像预处理、图像分割和特征提取三方面)。
高层模块是水下目标识别系统的最终实现部分,一般采用的是神经网络识别算法进行识别分类。
二.声视觉系统理想的声视觉系统作为智能水下机器人的传感设备,应该具备灵敏度高、空间分辨率高、隐蔽性好、抗干扰能力强、自主调节和全天候作业等特点,能适合探测弱目标和鉴别多目标的需要。
同时它能在比较复杂的人为干扰和自然干扰下,实现对目标的自动识别和跟踪选择。
声视觉系统最终要完成的任务是目标的自动定位、分类识别以及对运动目标实现跟踪,而完成这一任务的核心和前提条件是拥有一台高分辨率水声探测设备。
水下激光成像系统设计及实验
第36卷,增刊红外与激光工程2007年9月V bl.36Suppl e m e nt I】臣6鼍red a nd I。
ase r Engi nee血g S e p.2007水下激光成像系统设计及实验杨述斌1,彭复员2(1.武汉工程大学电气信息学院,湖北武汉430073;2.华中科技大学电子信息工程系,湖北武汉430074)摘要:针对水下目标探测这一难题,设计了基于距离选通技术的水下激光成像系统并进行了相关实验。
从实验结果来看,该系统可有效克服激光后向散射并对水下目标进行成像,对于水下目标探测、识别十分有效。
,关键词:水下激光成像:距离选通;后向散射中图分类号:TN248文献标识码:A文章编号:1007—2276(2007)增(探测与制导)一0075.04 1飞■'●n l■■●●J_,e Sl gn ann eX per l m ent0I an U nner W at er I aSer l m a里qng SV St emW凼G Shu-bi I l l,PE N G Fu.yuan2(1.sch砌of Ele嘣cal&Ⅻb玎nali∞Eng.,w盯'‰430073,chiIla;2.呻t_of Elec咖ics&埘.o彻撕∞Eng.,邸sT,wuh姐430074删A bst r舵t:Unde刑a t er t a r ge t det e‘:t i o n i s al w ays di f!f i cul t.A n unde哪at er l a se r i m a百ng s ys t em isde si gl l e d bas ed on r an ge gat i ng aI l d re l a t e d exper i m ent s ar e pr oces s ed.T he exper i m ent s pr oved m at m ei m a gi ng s ys t em coul d ef f i c i e nt l y el i I I l i nat e backs cat t ered1a se r and、l nd er w at er t a唱e t i Im ge w鹊obt ai ned.ni s a ef!I[i ci em m e m od i n under w at er t a r ge t det e ct i on ar l d r e cogni t i on.K ey w or t l s:U nder w at er l a se r i m a百ng;R aI l ge ga廿ng;B a cks cat时0引言水下图像探测要获得好的效果,必须解决吸收和散射两方面的问题。
距离选通水下激光成像作用距离简化核算方法
第51卷 第3期 激光与红外Vol.51,No.3 2021年3月 LASER & INFRAREDMarch,2021 文章编号:1001 5078(2021)03 0306 05·激光应用技术·距离选通水下激光成像作用距离简化核算方法付学志1,王庆胜1,邓代竹2,李 季2(1.92228部队,北京102488;2.湖北久之洋红外系统股份有限公司,湖北武汉430223)摘 要:距离选通水下激光成像技术通过控制成像模块的阴极快门时间,从时域上屏蔽大部分可进入成像模块的光信号,能有效抑制水体后向散射对激光成像系统探测性能的影响,提高作用距离。
距离选通水下激光成像设备的作用距离与水质条件有关,文章给出了一种关于作用距离的有效简化计算方法,根据该方法,可得出设备在不同水质的作用距离。
关键词:距离选通;激光成像;后向散射;作用距离中图分类号:TN249 文献标识码:A DOI:10.3969/j.issn.1001 5078.2021.03.008AsimplifiedaccountingmethodfortherangeofdistanceseparationlaserimagingunderwaterFUXue zhi1,WANGQing sheng1,DENGDai zhu2,LIJi2(1.Unit92228ofPLA,Beijing102488,China;2.HubeiJiuzhiyangInfraredSystemCo.,Ltd,Wuhan430223,China)Abstract:Bycontrollingthecathodeshuttertimeoftheimagingmoduleandshieldingmostoftheopticalsignalsthatcanentertheimagingmoduleintimedomain,thelaserrangegatedimagingtechnologycaneffectivelysuppressthein fluenceofback scatteringofwaterontheperformanceoftheimagingsystemandimprovetheoperatingrange.Theop eratingrangeofthelasergatedimagingequipmentisrelatedtothewaterqualitycondition.Thispaperpresentsanef fectivesimplifiedcalculationmethodoftheoperatingrange,accordingtowhichtheoperatingrangeoftheequipmentindifferentwaterqualitycanbeobtained.Keywords:rangegated;laserimage;back scattering;operatingrange作者简介:付学志(1982-),男,工程师,博士,研究方向为光学图像处理。
水下成像技术
水下激光成像技术5 水下激光成像技术本文主要介绍了近年发展起来的三种主要的激光水下成像方法,即常规水下激光成像、高分辨率水下激光三维成像和偏振激光成像,分析了它们各自的工作原理、特点以及各自的发展状况。
水下成像技术在水下目标发现、海面材料探测及海洋地理工程中具有广泛而重要的应用价值,正受到各国研究者的日益重视。
与我们平常所见空气中成像技术不同,水介质的特性是强散射效应和快速吸收功率衰减,因此直接将摄像机运用到水中,由于强散射效应,图像的噪声很大,且距离有限。
激光器的运用从某种程度解决了成像的距离问题,在过去的几年中,成像距离和图像质量得到了很大程度的提高,这些进步都是因为采用了非传统成像技术和激光技术。
本文对主要的几种水下成像技术进行了分析,讨论了它们各自的技术原理和发展动态。
5.1工作原理由上所述,与大气成像技术相比,水下成像技术的重点是要减小水这一特定介质所具有的强散射效应和快速吸收功率衰减特性对成像质量的限制。
目前已经有几种成像技术在实际中得到应用且达到较好的工作效果,它们的工作原理和技术特点见表1。
表1 主要水下成像技术的工作原理比较5.1.1常规激光水下成像技术常规水下成像技术包括激光扫描水下成像和距离选通激光水下成像。
其中激光扫描水下成像是利用水的后向散射光强相对中心轴迅速减小的原理。
该技术采用准直光束点扫描和基于光电倍增管的高灵敏度探测器的窄视域跟踪接收。
如图1,在这种系统中,探测器与激光束分开放置,激光发射器使用的是窄光束的连续激光器,同时使用窄视场角的接收器,两个视场间只有很小的重叠部分,从而减小探测器所接收到的散射光。
利用同步扫描技术,逐个像素点探测来重建图像。
因此这种技术主要依靠高灵敏度探测器在窄小的视场内跟踪和接收目标信息,从而大大减小了后向散射光对成像的影响,进而提高了系统信噪比和作用距离。
距离选通成像系统采用一个脉冲激光器,具有选通功能的像增强型CCD成像期间,通过对接收器口径进行选通来减小从目标返回到探测器的激光后向散射。
水下单像素成像系统研究
影响, 先后提出距离选通[ 3~ 5] 和激光扫描[ 6, 7] 等技术。前者虽 能有效改善后向散射对成像质量的影响, 提高图像信噪比, 但 是其成像距离受到接收器件的 CCD( 或 CM OS) 像素灵敏度的 限制; 后者虽能有效增加成像距离, 但是由于水对准直激光束 的扩散作用和系统硬件的限制, 其成像分辨率低。因此, 现有 的水下成像技术难以同时兼顾成像距离和成像质量。 本文首次进行了基于压缩感知 ( CS, compressive sensing) [ 8, 9] 理论的单像素相机成像技术 在水下成像的研究, 针对水下 复杂的光学成像环境, 结合水下距离选通技术、 水下激光照明
Abstract: Owing to t he complicat ed underwat er imaging conditions which seriously restrict the develop ment of underwater imaging, especially the remote underwater imaging, a novel underwat er imaging framework based on the compressive sensing ( CS) is proposed in t his paper. T he single pixel camera based on CS is firstly applied to the underwater imaging field. Incorporating the range gate and laser pulse illumination t echnology, we design the architect ure of the underwater CS single pixel camera sys t em, and construct the measurement matrix and the reconstruction algorithm for this system. By t he the ory analysis and simulated experiment, the image resolution and the imaging distance of our method are compared with those of range gate imaging and other underwater imaging methods respectively. T he re sult s show t hat the proposed method not only increases the imaging distance but also improves t he image quality. Key words: imaging system; underwater single pixel imaging; compressive sensing ( CS) theory; single pixel camera; range gate; laser illumination
基于距离选通的激光主动成像技术的研究
d s rb st ec r e tsae o o eg e e rh a d f t r r n s e c ie h u rn t t ff r in r s a c n u u e te d .
e f c n he c i e m a ng y t m , d s rb s a e ga e i gi prn i l o hi - p e f e t o t a tv i gi s s e e c i e r ng — t d ma ng i c p e f gh s e d g t d i gi g,a d t ons iu i g a l s r r ng - t d a tv m a i ys e ,t y de c s a e ma n n o c tt tn a e a e ga e c i e i g ng s t m he ke vie
第3卷 3
第 2 期
光
学
仪
器
Vo . 3,No 2 13 . Ap i,2 1 r 1 01
21 年 4 01 月
oP CAL N S TI I TRU M E TS N
文章 编 号 :1 0 —6 0 2 1 ) 20 4 — 5 0 55 3 ( 0 1 0 —0 70
基 于 距 离选 通 的激 光 主 动 成 像 技 术 的研 究
*
初 士博 , 孟德 , 志刚 , 书凯 , 刘 盖 杨 周 扬 , 杨俊 贤
双通道激光主动探测系统
双通道激光主动探测系统刘秉琦;周斌;武东生;张瑜【摘要】A dual-channel active laser detection system based on an Avalanche Photo Diode(APD) and a Charge-couple Device(CCD) is designed to effectively detect weak echo signals of "cat-eye" targets and to acquire the intuitive image information of a target area. Firstly, the concept of hardware design is introduced, including the functions and constitution of some modulies and the types of primary assemblies. Then,based on the key problems of designing receiving-magnifying circuit in the APD detection mode, the circuit constitution, working principle and the selection of main parts are discussed,and the match of response spectrum for the CCD and laser is analyzed. Finally, the detection experiments are performed by using typical "cat-eye" targets at different distances. The experimental results show that the echo signal power of the typical "cat-eye" target is 2. 87 times that of mirror-like surface at a distance of 550 m in the APD mode; and the echo signal power of a telescope and that of optical window for a laser finder are 2. 72 times and 2. 31 times those of background at distances of 550 m and 2 500 m in the CCD mode,respectively. The dual-channel active laser detection system can capture the "cat-eye" targets from background and jamming targets easily, which proves the rationality and validity of the proposed system.%为了有效探测“猫眼”目标的微弱回波信号并获得目标区域的直观图像信息,设计了基于雪崩光电二极管(APD)单元探测器和电荷耦合器件(CCD)面阵探测器的双通道激光主动探测系统.介绍了硬件设计的基本思路,包括各模块功能、组成和主要部件所采用的型号.针对双通道探测模式的关键技术,阐述了APD探测模式下接收放大电路的设计方法,并分析了CCD探测模式下响应波长的匹配问题.最后,在外场条件下,利用望远镜和激光测距机等典型“猫眼”目标对该双通道激光主动探测系统进行了实验验证.实验结果表明,利用APD探测模式进行探测时,550 m距离处望远镜的回波能量响应是类镜面目标回波能量响应的2.87倍以上;利用CCD探测模式进行探测时,550 m距离处望远镜的回波能量响应和2 500 m距离处激光测距机光学窗口的回波能量响应分别是背景目标回波能量响应的2.72倍和2.31倍以上.该双通道激光主动探测系统可将典型“猫眼”目标从背景及干扰目标中清晰检出,验证了探测系统设计的合理性和有效性.【期刊名称】《光学精密工程》【年(卷),期】2012(020)002【总页数】6页(P241-246)【关键词】激光主动探测;"猫眼"效应;雪崩光电二极管(APD);电荷耦合器件(CCD);目标识别【作者】刘秉琦;周斌;武东生;张瑜【作者单位】军械工程学院光学与电子工程系,河北石家庄050003;军械工程学院光学与电子工程系,河北石家庄050003;中国人民解放军71192部队,山东文登264400;军械工程学院光学与电子工程系,河北石家庄050003;北京理工大学光电工程系,北京100081;军械工程学院光学与电子工程系,河北石家庄050003【正文语种】中文【中图分类】TN977;TN2491 引言在光学观瞄系统、光电侦察系统、光电跟踪系统、光电搜索系统、光电火控系统以及光电测距系统等绝大多数军用光电装备中,所用的光学接收镜头的焦平面都安装有反射或半反射元件(如探测器或分划板)。
一种应用距离选通成像技术的微光望远镜
关键 词 : 激光 照 明 ; 微 光选 通望 远镜 ; 距 离选 通 ; 后 向散射
中 图分 类 号 : T N2 4 9 文献标志码 : A d o i : 1 0 . 5 7 6 8 / J AO 2 O 1 3 3 4 . 0 4 0 5 0 0 1
Lo w— l i g ht l e v e l t e l e s c o p e b a s e d o n l a s e r r a n g e g a t e t e c h no l o g y
l i g ht de t e c t i o n a n d i m pr o v e t he ob s e r va t i o n e f f e c t s .A d o pt i ng r a ng e g a t i n g t e c h no l o gy,pr o pe r —
Ab s t r a c t : Un de r t h e h e l p o f a uxi l i a r y l i gh t i ng o n l o w— l i g ht l e v e l s y s t e m b y us i n g l a s e r wi t h i n—
第 3 4卷 第 4期 2 0 1 3年 7月
应
用
光
学
V0 1 . 3 4 NO . 4
J o u r n a l o f Ap p l i e d Op t i c s
J u 1 .2 0 1 3
文章编号 : 1 0 0 2 — 2 0 8 2 ( 2 0 1 3 ) 0 4 — 0 6 6 7 — 0 5
一
种 应 用 距 离 选 通 成 像 技 术 的微 光 望 远镜
基于距离选通的水下偏振光成像系统的研究
选通 的 偏 振 成 像 技 术 运 用 于 水 下成 像 的 可 行 性 , 能 大大 提 高 图像 的对 比度 , 其 成像 质 量 优 于距 离选 通 方 式 。 且 使 关 键 词 :距 离 选通 : 振 :对 比度 : 下 成像 偏 水 ,
中 图分 类 号 : N 2 . T 9 93
me o s r p s d . c r i g t h r c p e o me s p r t n o r e e e td l h y u i g s n h n u o t l h t d Wa p o e Ac o d n o t e p n il t e a ai ft g tr f ce i t b sn y c r o s c n r o i f i o a l g o o
o a g -a e ma e  ̄c n q e a d p lrz t n i g e h iu , e p l r a in i g e h iu a e n r g — ae fr n eg t d i g h iu n o aia i ma e t c n q et o a z t ma e t c n q e b s d o a e g t d o h i o n
d v c a d t e t e d f r n e b t e n t g t a d b c g o n e oa z t n c a a tr t s h e meh d c n b s d i e ie, n h i e e c ew e a e h r n a k r u d d p l r a i h r ce si ,t t o a e u e n i o i c s b rn ma i g I h s p p r t e p l r a o ma i i g me h n s b s d o a g - ae ma i g p n i l , a o t r u ma e i g n . n t i a e , h o a i t n i gn n c a im a e n r n e g td i g n r c p e lb r o y i zi i a e up n s a d x e me tl rc s e e ic s e i d ti.T r u h x r na a a y i, te e ii t f te q i me t n e p r n a p e s w r ds u s d n ea l h g e p i i o o e me t l n l s s h fa b ly o s i h
光电雷达-距离选通技术
距离选通激光雷达技术摘要:成像激光雷达无论在军用领域还是民用领域日益得到广泛的应用。
其中,激光距离选通成像技术经过数十年的发展,在军事侦察、搜救、监视、水下探测等方面获得重要的应用。
本文介绍了距离选通激光雷达的工作原理,对距离选通激光雷达设计中的关健技术进行分析,给出了几种具备代表性的元件及其指标。
关键词:激光雷达;同步控制;距离选通;主动成像引言1960 年世界上第一台激光器诞生以来,激光雷达便以其独特的优势成为雷达研究领域的热门项目,其中无扫描成像是激光雷达发展趋势之一[1]。
一般的成像激光雷达在对水中的目标进行成像探测时,或者陆地探测而大气中含有较多的雨、雾或烟等悬浮颗粒时,就会产生很强的前向和后向散射,又或者在海上、雪地或者白天等环境中探测时,会产生很强的背景光辐射,这些情况都会对成像质量造成严重影响。
为了使激光雷达能在上述情况中也能够很好的工作,人们发明了距离选通技术,并且逐步成为人们研究的热点[2]。
距离选通激光雷达能很好的消除背景光及散射的影响,在上述复杂环境中获得目标的 2D强度像,并且经过进一步的数据处理还可以从多幅的 2D像中获得关于距离的 3D距离像[3]。
距离选通激光成像激光雷达系统属于主动成像,它不仅可以克服被动成像的一些缺点,比如能够获得更高的成像分辨率,不受环境的背景光的影响等;而且同时它也可以弥补主动成像的一些不足,降低大气散射、湍流等对激光脉冲的前行波和回波的影响,使其在水底目标成像和矿产探测,远距离军事目标识别和跟踪方面都可以有很广泛应用[4]。
1 成像激光雷达近年来人们对成像激光雷达的研究越来越关注,并且成像激光雷达有着取代传统微波雷达的趋势[5]。
这是因为激光成像雷达有着微波雷达无法比拟的优势,比如利用激光作为光源可以使雷达系统具有极高的距离分辨率、速度分辨率、角分辨率和很强的抗干扰能力,而且能在烟雾较多的大气中进行探测,还能对位于树林、灌木丛或伪装网后面的目标进行成像探测和识别,这在军事方面有着很重要的应用值;另外对于特定波长的激光雷达可以进行水底探测,便于实现水底矿产或海底地形的开采[6]。
距离选通激光成像水体后向散射光能量分布计算
距离选通激光成像水体后向散射光能量分布计算近几年,随着科学技术和经济发展的迅速发展,人类开始更加关注水资源。
在水质监测方面,随着技术的发展,许多新的技术和新的仪器已经被开发出来。
其中距离选择性激光成像技术是一种有效的水质监测技术,也是一种高精度的测试方法。
它可以提供有关水体中悬浮颗粒、有机物和对流层的信息,通过测量不同的后向散射光的能量分布,为水质研究提供精确的参考。
距离选择性激光成像技术的应用越来越广泛,主要原因是激光能够提供准确的数据,而且结果显示准确可靠。
它可以精准地测量流体中悬浮颗粒后向散射光的能量分布,为水质监测提供重要的参考。
距离选择性激光成像水体后向散射光能量分布计算可以通过多种方法实现,具体而言,可以通过激光干涉仪、激光束轮、显微镜和量子调制器等设备进行,并且可以使用相应的计算机软件来实现。
此外,距离选择性激光成像技术还可以应用于游离态氧、盐度、PH值和水体中悬浮颗粒的测量等方面。
首先,距离选择性激光成像技术可以准确测量水体中悬浮颗粒的后向散射光能量分布,并且可以提供准确的测量数据。
其次,它可以识别出水体中不同的物质,从而为水质监测和研究提供精确的参考数据。
此外,这种技术还可以帮助用户识别出水体中存在的有机物,从而更好地进行水质监测研究。
采用距离选择性激光成像技术进行水体后向散射光能量分布计算时,应注意以下几点:1.首先,应确保激光光线和水体表面保持垂直,确保测量结果的准确性。
2.其次,应仔细检查激光发射装置,确保其工作状态良好,并且可以提供准确的测量数据。
3.此外,应确保数据采集和计算过程的准确性,例如检查数据采集设备的状态、确认测量结果和校准设备等。
距离选择性激光成像技术在水质监测方面具有重要的参考价值,为水质研究提供准确的数据,也是一种有效的测试方法。
然而,在使用这种技术时,应注意激光发射装置的工作状态、数据采集的准确性和激光光束与水体表面的垂直性等问题,以确保测量结果的准确性。
距离选通技术对后向散射抑制作用的理论分析
() 8
得到 z ) f/ , 中 t ∈[ , ] 则 z ∈[ , 2 。类 似式 ( ) —z ( 一c ,2 其 O t , —z ) O c / 3 , p ( t 1 可推 导 出
c 鲁 等 。 一, z 一 c c f 写 d 等“ . : …
() 5
并对 ,() 7 L 求导
讥 ) 一
…
x L L 。 4
d+1 > 。 l ]
() 6
( ) L 的单 调递 增 函数 。随着 L的增 大 , 增 大 , ( ) 的 y 随之 减小 。当 L增 大 到 一定 程 度 时 , L为 式 4中 单 C D像元信噪 比过低 , C 图像不 可用 。所 以要在单 C D像 元信 噪 比可 以接受 的范 围内提高 成像 距离 L, C 就必 须
y n 老一 一 n 一
关 。将 ( ) 改写为 3式
L)一 e& L a L4 d z
由式 ( ) 式( ) 3 、 4 可知 , 响单 C D像元 信 噪 比的 因素包 括 , , , 和 尺 其 中前 三项 受天 气 条件 影 C P() L
影响, 最后 一项 由目标 本身属 性 决定 。在天 气状 况确 定 的 情 况 下 , C D像 元 信 噪 比主 要 与成 像 距 离 L相 单 C
fJ
1 …
]
…
一-I. 1. -. .一 . . . .
r 几 一 一 一 ] 一 一一 . . 几
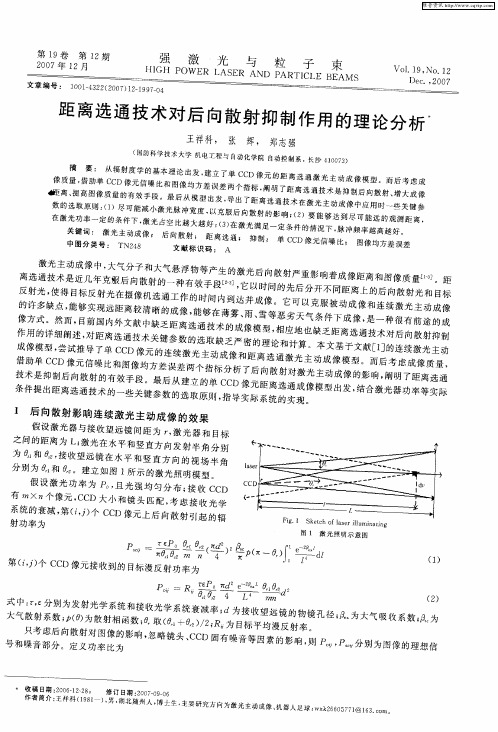
假设 t 时刻 目标 反射 光前 沿 抵 达采 集设 备 , C 。 CD
图2 连 续激光和距 离选通成像工 作时序
选 通 成 像 。 比激 光 前 沿 延 时 t 的 激 光 , Z t) 的 后 向 散 射 光 与 目标 反 射 光 前 沿 同 时 到 达 C D, 。 , 在 ( 处 o C 有
基于距离选通的非视域成像技术实验
基于距离选通的非视域成像技术实验韩宏伟;钟炜【摘要】介绍了采用距离选通技术进行非视域成像探测的原理,基于窄脉冲激光器和选通型成像器件搭建了非视域主动成像实验系统.以玻璃作为中介反射面,以黑白条纹靶板作为目标,对目标和周围环境处于不同光照情形时,系统的非视域成像效果进行测试.结果表明,基于距离选通的非视域成像技术是一种能够在不同光照条件下实现对视觉盲区进行有效观察的成像技术.【期刊名称】《光学仪器》【年(卷),期】2015(037)003【总页数】6页(P220-225)【关键词】距离选通;非视域成像;背景光【作者】韩宏伟;钟炜【作者单位】海军工程大学兵器工程系,湖北武汉430033;海军工程大学兵器工程系,湖北武汉430033【正文语种】中文【中图分类】TN29借助光滑墙壁或窗户的反射间接成像,以实现对由于墙壁或街道拐角等遮挡而形成的无法直接观察的视觉盲区进行观察的技术称为非视域成像技术[1-2]。
由于能够绕过拐角或障碍物的遮挡对目标成像,该技术在城市巷战、反恐、灾难救援等方面都具有较大的应用潜力[2]。
瑞典国防研究局(FOI)和德国FGAN-FOM实验室于2006-2007年联合开展了非视域成像技术的外场实验[3-4],其实验系统采用1.5μm波长的激光器和Intevac公司的选通型红外相机,配备500 mm的镜头。
实验中,系统距墙面90 m,激光以30°的入射角照射墙面。
当以墙面上的窗户玻璃作为中介反射面时,可以获得距离墙面20 m的持枪站立人员和30 m的汽车牌照图像。
当激光照射窗户周围的墙砖、混凝土和金属,而探测器仍通过窗户玻璃接收目标反射光时,可以获得铝箔制成的合作目标图像以及非常微弱的30 m处的汽车牌照图像。
2010年,FOI采用Obzerv公司的主动式距离选通夜视系统进行实验,该系统采用波长为860 nm的激光器。
实验时使用的中介反射面曲率半径约1.5 m的光洁喷漆曲面(汽车外壳),由于损耗因子较大,只能获得距汽车1.5 m处的人员图像[5]。
红外探测系统中探测波段的选择对比分析
红外探测系统中探测波段的选择对比分析安文强;王春艳;孙昊;庞广宁【摘要】针对常用的中波和长波红外探测系统,从分析目标的热辐射特性、背景的辐射特性、以及由目标到红外探测器的前向光学通道的传递函数性能,对光电探测系统的短波红外和长波红外探测系统能力进行分析、计算和比较,科学剖析中波和长波红外探测各自的技术优势和适用范围,为设备论证中成像器件合理选型及试验任务中捕获跟踪提供理论依据.%The ability of the commonly used medium wave and long wave infrared detection system in the photoelectric detection system is analyzed,calculated and compared in thispaper,according to analyze the thermal radiation charac-teristic of the target and the radiation characteristic of the background as well as evaluate the transfer function perfor-mance of the forward optical channel(atmosphere optical system and infrared optical system)from the target to the in-frared detection. This paper analyze the respective technical advantages and application scope of the medium wave and long wave infrared detection technologies scientifically,result in providing a theoretical basis for selection of the imaging devices in equipment demonstration and tracking capture in experimental.【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2018(041)002【总页数】5页(P76-79,82)【关键词】红外辐射;背景辐射;大气传输;波段选择【作者】安文强;王春艳;孙昊;庞广宁【作者单位】长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022;长春理工大学光电工程学院,长春130022【正文语种】中文【中图分类】TN21在以热红外辐射探测为基础的红外成像系统中,红外热像仪接收来自目标和景物的红外辐射形成红外图像,经过光电转换,将不可见的辐射转变成可见的图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并对%(L)求导
舭)一警水x…』L字出 讥)一掣潞2¨L4f字¨e2坝L3f字¨1]>。
8MSE一立旦止生———————~一上旦尘生———一
刀m卯饥
(5)
(6)
珊(L)为L的单调递增函数。随着L的增大,%增大,式(4)中的%随之减小。当L增大到一定程度时,单 CCD像元信噪比过低,图像不可用。所以要在单CCD像元信噪比可以接受的范围内提高成像距离L,就必须 抑制后向散射的影响。 设系统图像采集时间为Tc,则理想成像图像从能量角度可以表述为P。T。,实际图像表述为P,T=(P0+ P。。)Tc。借用图像的客观质量评价方法‘63来考察后向散射对整幅图像质量的影响,则图像均方差误差eMsE为
△£一£。。一sM驱一∑∑([R#(纪)力2一P‰)霹
考察
(15)
ESc。(纪)厂≤箍鲁等(竿)2譬夕(,c—g珥玎l“。写竽dz《P5c冉,一P刚口
并代入式(15),有
(16)
△e《∑∑(口2—1)P‰T2/删<o,
上式表明,采用距离选通技术,能够提高主动成像图像质量。
其中n∈[o,1]
(17)
综上,在信噪比可以接受的范围内,距离选通技术可以提高成像距离;在相同条件下,距离选通技术可以降 低后向散射对图像质量的影响。所以距离选通技术是抑制后向散射的有效手段。
4
结
论
本文从理论上建立了单CCD像元距离选通激光主动成像模型,并借助单CCD像元信噪比和图像均方差
误差证明了照离选通技术是抑制后向散射的有效手段。最后,论文从建立的模型出发,结合激光器功率等实际
条件,推导了距离选通技术实现时几个关键参数如激光频率厂、占空比口、脉宽知等的选取原则,用以指导距离 选通技术的实现。 参考文献:
P。。,。i。/P,Ini。=T。/T。一1/n (21)
式(21)表明距离选通成像所需激光器的最小功率为同等距离同等条件下直接照射成像所需激光器最小功 率的1/口。从能量角度考虑,得到参数选取原则二:要能够达到尽可能远的观测距离,在激光功率一定的情况 下,口愈大愈好。
万方数据
2000
强
激
光
与
摘要:从辐射度学的基本理论出发,建立了单CCD像元的距离选通激光主动成像模型。而后考虑成 像质量,借助单CCD像元信噪比和图像均方差误差两个指标,阐明了距离选通技术是抑制后向散射、增大成像
砸离、提高图像质量的有效手段。最后从模型出发,导出了距离选通技术在激光主动成像中应用时一些关键参
数的选取原则:(1)尽可能减小激光脉冲宽度,以克服后向散射的影响;(2)要能够达到尽可能远的观测距离, 在激光功率一定的条件下,激光占空比越大越好;(3)在激光满足一定条件的情况下,脉冲频率越高越好。 关键词: 激光主动成像; 后向散射;距离选通;抑制;单CCD像元信噪比; 文献标识码:
3
距离选通成像关键参数的选取原则
理想情况下,距离选通技术原理要求激光频率厂满足 ,≤l/(2L/c+£。)
(18)
即当反射光脉冲末端到达接收器后才能发射下一个脉冲。 式(13)中,令
弛,)=4喁√脒‰纵丌一帆4eL。训,。字龇舢‰)『-…n搿≤。
质量降低。由此得到参数选取原则一:尽可能地减小£。,以克服后向散射的影响。 K。P。iT。≥E。[¨,故连续激光成像时对激光功率的要求满足 P。≥E。/K。K。T。
h~.::::::::沪笆≤歹 ,三善≤<:::l=:k
...,一一。’’一
专’
c・, u’
Fig.1
Sketch of laser illuminating
图1激光照明示意图
P。。一荔爱笔等c警,2譬乡c丌一以,』L写=dz ,∞。一丽i i。T厂i夕¨一啡’J。1r叫
第(i,歹)个CCD像元接收到的目标漫反射功率为
1 0"
㈤ (3)
记去=型毪熹业,A—f字此%一觚,故单CCD像元信噪比(ScsNR)%为
.
%=…n每一…n去一…n砉
(4)
由式(3)、式(4)可知,影响单CCD像元信噪比的因素包括展,,风,夕(口),L和R。,其中前三项受天气条件 影响,最后一项由目标本身属性决定。在天气状况确定的情况下,单CCD像元信噪比主要与成像距离L相 关。将(3)式改写为
(19)
上式表明,随着昂的增大,单CCD像元信噪比减小。类似地,由式(15)也可以得到:随着玮的增大,图像 假设CCD平均照度灵敏度阚值为E。,激光源的光视效能为K,,连续激光照射时CCD能够成像必须满足
(20)
式榔,砘最警字等死
同理,采用距离选通技术是对激光功率的要求满足P。。。≥E。/K,K。T。。在成像距离一定的情况下比较两 者的最小功率
1
后向散射影响连续激光主动成像的效果
假设激光器与接收望远镜间距为r,激光器和目标
之间的距离为L;激光在水平和竖直方向发射半角分别 为晓。和只。,接收望远镜在水平和竖直方向的视场半角
分别为配,和如。建立如图1所示的激光照明模型。
假设激光功率为P0,且光强均匀分布;接收CCD 有m×’z个像元,CCD大小和镜头匹配,考虑接收光学 系统的衰减,第(i,_『)个CCD像元上后向散射引起的辐 射功率为
粒
子
束
第19卷
综合考虑式(19)和(21),得到参数选取原则三:在满足式(18)的情况下,激光脉冲频率,越高越好。 假设激光照亮区域长度△z=c~=c乜/.厂,成像景深为[L一△z/2,L+“/2]。由以上原则,确立距离选通技 术各参数选取顺序为;根据成像需要选择合适的景深,而后根据激光光源允许的最高频率和式(18)得到厂,最 后确定口和£。。
@ 8
Psc。cu=荔爰鲁譬c譬,2譬夕c丌一只,,二‰,。写竽dz
同理可得在£∈[岛,%+£。]时刻
@ 9
fz—z’(£)=露p,(,)/2,
£p,∽∈[o,£p(o],
zP(f)一0~(£一岛) m O
1P。“cc,=箍鲁鲁c警,2譬夕c兀一以,』二吒∞,:号竽dz
单次脉冲时间内,第(i,.『)个CCD像元上接收到的后向散射能量为
E。Ⅱ(£。)=l吣”9P。口(f)d£=I’P。。#(£)出
万方数据
,●、,L
n 1 \,、,\,、,
第lo期
王祥科等:距离选通技术对后向散射抑制作用的理论分析
采用距离选通技术单CCD像元信噪比为
‰_1 01n毒苗=1 oln鲁 u
1_,sC"\oC,
(12)
式中:B=rL.刊,。字Ⅲr。
比较式(4)和式(12),得 △y=%口一%一10
*收稿日期:2006—12—28; 修订日期:2007一09—06 作者简介:王祥科(198l一),男,湖北随州人,博士生,主要研究方向为激光主动成像、机器人足球;wxk26605771@163.com。
万方数据
强
激
光
与
粒
子
束
第19卷
%一等:竺≤掣垒
%一铲=:————1而『_竺—L一 一l、"
A
图像均方差误差
中图分类号:TN248
激光主动成像中,大气分子和大气悬浮物等产生的激光后向散射严重影响着成像距离和图像质量[1≈]。距 离选通技术是近几年克服后向散射的一种有效手段[2’3],它以时间的先后分开不同距离上的后向散射光和目标 反射光,使得目标反射光在摄像机选通工作的时间内封达并成像。它可以克服被动成像和连续激光主动成像 的许多缺点,能够实现远距离较清晰的成像,能够在薄雾、雨、雪等恶劣天气条件下成像,是一种很有前途的成 像方式。然而,目前国内外文献中缺乏距离选通技术的成像模型,相应地也缺乏距离选通技术对后向散射抑制 作用的详细阐述,对距离选通技术关键参数的选取缺乏严密的理论和计算。本文基于文献[1]的连续激光主动 成像模型,尝试推导了单CCD像元的连续激光主动成像和距离选通激光主动成像模型。而后考虑成像质量, 借助单CCD像元信噪比和图像均方差误差两个指标分析了后向散射对激光主动成像的影响,阐明了距离选通 技术是抑制后向散射的有效手段。最后从建立的单CCD像元距离选通成像模型出发,结合激光器功率等实际 条件提出距离选通技术的一些关键参数的选取原则,指导实际系统的实现。
第19卷第12期
2007年12月
文章编号:
强
HIGH
激
POWER
光
LASER
与
粒
子
束
BEAMS
V01.19,No.12 Dec.,2007
AND PARTICLE
1001—4322(2007)12一1997一04
距离选通技术对后向散射抑制作用的理论分析+
王祥科, 张辉, 郑志强
(国防科学技术大学机电工程与自动化学院自动控制系,长沙410073)
Fig.2
plu∞d laser
|、
。c
7
h
,d
叮]同n…
sequence
R刍1……一. ]
厂]
of CW 1aser lmaging and range_gated imaging
Time
图2连续激光和距离选通成像工作时序
选通成像。比激光前沿延时£。,的激光,在z’(t。)处的后向散射光与目标反射光前沿同时到达CCD,有 227(岛)/c+f,,一2z/c 得到z—z’(%)一f£,,/2,其中和∈[o,~],则z一2’(如)∈[o,c气/2]。类似式(1)可推导出
%一R。象警学挚2
大气散射系数;p(口)为散射相函数;印取(包。+如)/2;R。为目标平均漫反射率。 号和噪音部分。定义功率比为
㈤
式中:r,£分别为发射光学系统和接收光学系统衰减率;d为接收望远镜的物镜孔径;展。为大气吸收系数;熊。为
只考虑后向散射对图像的影响,忽略镜头、CCD固有噪音等因素的影响,则P。#,P。d分别为图像的理想信