交点法坐标计算
全线三维坐标计算(交点法)
请输入线路起点桩号:K00+000.0000
(输入交点及起终点点号时,交点编号只要输入数字即可,起点输为0,终点输为一个"-"数),请在蓝格子里(第1~6、23、24列)输入曲线数据
请输入线路起点桩号:K00+000.0000
(输入交点及起终点点号时,交点编号只要输入数字即可,起点输为0,终点输为一个"-"数),请在蓝格子里(第1~6、23、24列)输入曲线数据
线路曲线要素请输入线路起点桩号:K00+000.0000
(输入交点及起终点点号时,交点编号只要输入数字即可,起点输为0,终点输为一个"-"数),请在蓝格子里(第1~6、23、24列)输入曲线数据
路曲线要素。
交点法线路平曲线坐标计算 [新方法]
![交点法线路平曲线坐标计算 [新方法]](https://img.taocdn.com/s3/m/4eaa9513964bcf84b9d57bf7.png)
线路线路工程工程工程[[交点法交点法]]平曲线坐标计算[新方法]作者作者::刘宗远 联系方式QQ :63453673 2013年10月[简述]:在网上看了很多网友的线路交点法计算程序,平曲线小坐标大多采用的是切线支距法切线支距法切线支距法。
经本人结合线路工程的施工特点和相关资料,总结归纳出一套全新的全新的全新的线路坐标编程线路坐标编程线路坐标编程解算方法解算方法解算方法(弦线偏弦线偏角支距法角支距法——————也叫极坐标法也叫极坐标法也叫极坐标法)。
计算精度满足线路主线要求。
第一部分第一部分::基本公式基本公式一、圆曲线圆曲线::1、偏角:2、弦长:式中: —偏角—弧长所对应的圆心角—待求点到zy 点的距离 二、缓和曲线缓和曲线:: 1、切线角:(1)缓和曲线上任意一点切线角:(2)曲线上任一点偏角:(3)弦切角:(hy(yh)点处弦线与切线的交角)2、弦长:22590Lsr l l c i ××−= 式中:zh ki l −= 缓和曲线一点到zh 点的距离 —前(或后)缓和曲线总长第二部分第二部分::程序分步公式程序分步公式一、交点参数计算:(非对称缓和曲线型)1、内移值P :前缓和曲线内移值:341212688241R L R L P S s −= 后缓和曲线内移值:342222688242RL R L P S S −= 2、切线增长值q :前缓和曲线切增值:231124021R L L q s s −=后缓和曲线切增值:232224022RL L q s s −= 3、切线角β:前缓和曲线切线角: R L S 1901=β 后缓和曲线切线角: RL s 2902=β 4、切线长T :前切线长:ααsin 2112tan)1(1p p q P R T −−++=后切线长:ααsin 2122tan )2(2p p q P R T −+++=5、曲线总长:)(5.018021S S L L RL +×+=πα二、主点计算主点计算::1、桩号计算桩号计算::ZH=交点桩号-T1 HZ=ZH+L HY=ZH+L S1 YH=HZ-L S22、坐标计算坐标计算::1)ZH 点坐标点坐标:: 方位角:F 前=前直线方位角前直线方位角(或前切线方位角) X zh =X J D -T 1×cosF 前 Y zh =Y J D -T 1×sinF 前2)HZ 点坐标点坐标::方位角:F 后=F 前+ξα(交点转角) 注:ξ—交点转角偏向符,左偏-1 右偏+1 X hz =X J D +T 2×cosF 后 Y hz =Y J D +T 2×sinF 后3)HY 点坐标点坐标::前缓曲线终点偏角:前缓曲线终点弦长:212511901S S S L r L L C ××−=方位角:F=F 前+ξδ0 (缓曲线终点偏角) X hy =X zh +C 1×cosF Y hy =Y zh +C 1×sinF 4)HY 点坐标点坐标::后缓曲线终点偏角:后缓曲线终点弦长:222522902S S S L r L L C ××−=方位角:F=F 后+180-ξδ0 (缓曲线终点偏角) X yh =X hz +C 2×cosF Y yh =Y hz +C 2×sinF三、各线元段坐标计算 1、前直线段 Ki<ZH待求点到ZH 点的距离:Li=Ki-ZH方位角:F 前=前直线方位角(或前切线方位角) X=X ZH +Li ×cosF 前 Y=Y ZH +Li ×sinF 前2、前缓曲线段前缓曲线段 ZH ZH ≤Ki ≤HY HY待求点到ZH 点的距离:Li=Ki-ZH前缓曲线任意点偏角:1230S L R Li ××=πδ前缓曲线任意点弦长:212590S ii L r L L Ci ××−=中桩弦线弦线弦线方位角:F 中=F 前+ξδ 注:ξ—交点转角偏向符,左偏-1 右偏+1 中桩切线切线切线方位角:F 切=F 中+2 δ—缓曲线偏角 X=X zh +C i ×cosF 中+B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y zh +C i ×sinF 中+B×sin(F 切+θ) B—中桩至边桩的距离3、圆曲线段HY HY<Ki<<Ki<<Ki<YH YH YH待求点到HY 点的距离:Li=Ki-HY 圆曲线任意点弦长:2243rL L Ci i i ×−= 前缓曲终点切线角:RL S 1901=β 圆曲线偏角RLi×=πδ90 中桩弦线弦线弦线方位角:F 中=F 前+ξ(+)中桩切线切线切线方位角:F 切= F 前+ξ(+2) 注:圆曲线偏角为圆心角的一半X=X HY +C i ×cosF 中+B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y HY +C i ×sinF 中+B×sin(F 切+θ) B—中桩至边桩的距离 4、后缓曲线段后缓曲线段 YH YH ≤Ki ≤HZ待求点到HZ 点的距离:Li= ZH -Ki 后缓曲线任意点偏角:2230S L R Li ××=πδ后缓曲线任意点弦长:222590S ii L r L L Ci ××−=中桩弦线弦线弦线方位角:F 中=F 后+180-ξδ 注: ξ—交点转角偏向符,左偏-1 右偏+1 中桩切线切线切线方位角:F 切=F 中-2 δ—缓曲线偏角 X=X HZ +C i ×cosF 中-B×cos(F 切+θ) 注:θ—中线与中桩至边桩连线的夹角 Y=Y HZ +C i ×sinF 中-B×sin(F 切+θ) B—中桩至边桩的距离 5、后直线段后直线段 Ki>HZ Ki>HZ Ki>HZ待求点到HZ 点的距离:Li=H Z-Ki 方位角:F 后= F 前+ξα(交点转角) 注:ξ—交点转角偏向符,左偏-1 右偏+1 X=X HZ +Li ×cosF 后 Y=Y HZ +Li ×sinF 后工程实例工程实例表一表一 直曲表直曲表逐桩坐标表桩坐标表第三部分第三部分 [TI [TI 计算器计算器]]线路综合线路综合程序代码程序代码程序代码((坐标计算部分坐标计算部分))程序显示界面:一、主程序代码程序子程序二、坐标正算坐标正算子交点数据库子程序三、交点数据库子程序数据库子程序四、桩号桩位显示字符转换子程序 线元段、、桩位显示字符转换子程序桩号、、线元段。
交点法、线元法坐标计算
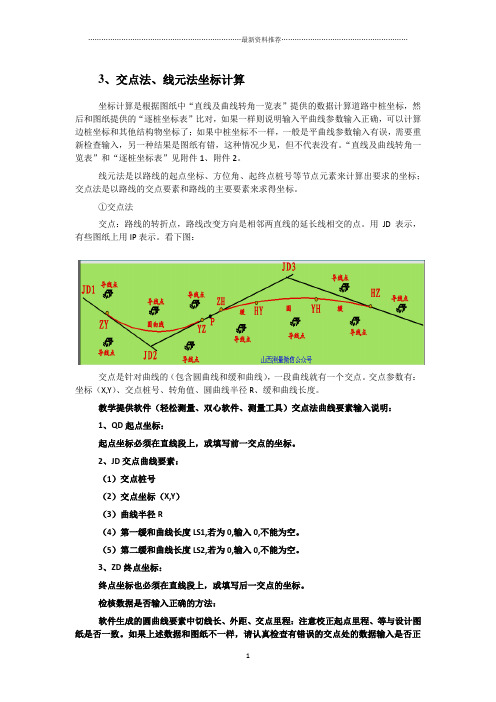
3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
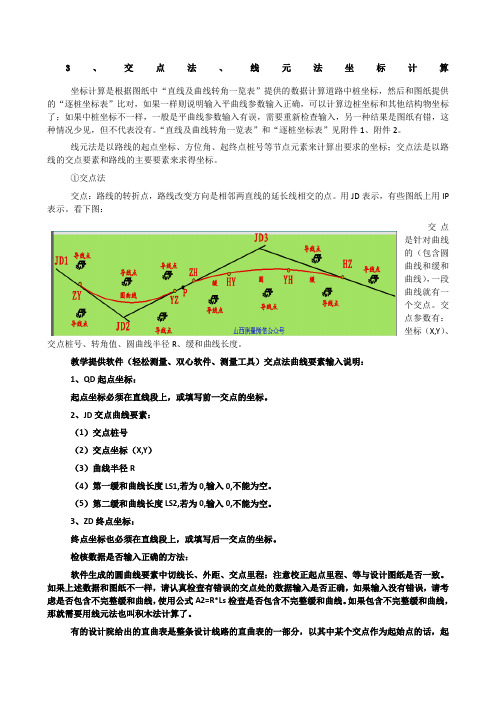
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP 表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A2=R*Ls检查是否包含不完整缓和曲线。
如果包含不完整缓和曲线,那就需要用线元法也叫积木法计算了。
有的设计院给出的直曲表是整条设计线路的直曲表的一部分,以其中某个交点作为起始点的话,起始里程有时候需要校正,当然,并不是每个图纸给出的起点里程都需要校正,大多数图纸的起点里程已经被设计院校正过,我们输入平曲线的时候需要验证一下。
交点法原理

交点法原理交点法是一种用来求解两条直线交点坐标的数学方法,它在计算机图形学、几何学和工程学等领域有着广泛的应用。
在实际应用中,我们常常需要求解两条直线的交点坐标,这时候交点法就能派上用场。
首先,我们来看一下两条直线的一般方程。
一条直线的一般方程可以表示为Ax + By = C,其中A、B、C为常数。
当然,这里有一个前提条件,就是A和B不能同时为0。
如果A和B同时为0,那这条直线就不存在了。
假设我们有两条直线,它们的一般方程分别为A1x + B1y = C1和A2x + B2y =C2,我们需要求解它们的交点坐标。
我们可以通过联立这两个方程,得到一个二元一次方程组。
这个方程组的解就是两条直线的交点坐标。
一般来说,我们会选择使用消元法或者代入法来解决这个方程组。
但是,交点法提供了另外一种更加简洁和直接的解决方案。
我们可以通过一些简单的数学推导,得到两条直线交点坐标的表达式。
假设我们有两条直线的一般方程为A1x + B1y = C1和A2x + B2y = C2,它们的交点坐标为(x, y)。
我们可以利用克莱姆法则来求解这个交点坐标。
克莱姆法则告诉我们,如果一个二元一次方程组的系数行列式不为0,那么这个方程组有唯一解,且这个解可以通过系数行列式的比值来求得。
对于两条直线的交点坐标,我们可以利用克莱姆法则得到如下的表达式:x = (C1B2 C2B1) / (A1B2 A2B1)。
y = (A1C2 A2C1) / (A1B2 A2B1)。
通过这个表达式,我们就可以直接计算出两条直线的交点坐标。
这种方法不需要进行繁琐的消元和代入运算,能够更加高效地求解交点坐标。
除了利用克莱姆法则,我们还可以通过向量的方法来求解两条直线的交点坐标。
我们可以将两条直线表示为参数方程的形式,然后通过向量的叉乘运算来求解它们的交点坐标。
这种方法也能够得到同样的结果,而且在一些情况下更加直观和易于理解。
总的来说,交点法是一种简洁而高效的求解两条直线交点坐标的方法。
第十六篇 交点法线元法混合式坐标计算

第十六篇交点法线元法混合式坐标计算作者:柠檬树QQ:2499105691. 混合式计算子程序(命名为JDF)第1行:N-TcosF→N:E-TsinF→E第2行:K→O:A-T→A: 0→P: 0→Q:K-A→L (有颜色加粗为字母O,其他为数值0,下同) 第3行:O≤A=> Prog “XYF”:O≤A=>Return第4行:1÷R→Q:U→L第5行:O>A+U=>A+U→K第6行:Prog “XYF”第7行:O≤A+U=>Return第8行:O→K:A+U→A:1÷R→P:V→L第9行:O>A+V=>A+V→K第10行:Prog “XYF”第11行:O≤A+V=>Return第12行:O→K:A+V→A:0→Q:W→L第13行:Prog “XYF”2. 计算坐标子程序(命名为XYF)第1行:L=0=>Return:K-A→S:(Q-P)÷L→I第2行:N+∫(cos(F+X(2P+XI)×90÷π),0,S)→N第3行:E+∫(sin(F+X(2P+XI)×90÷π),0,S)→E第4行:F+S(2P+SI)×90÷π→F第5行:F<0=>F+360→F: F>360=>F-360→F注:原第5篇中本程序已做部分变量调整,这里是调整后的结果,也可查看本程序集其他篇3. 数据库(命名为A)第1行:295.717→A:428822.366→N:558258.776→E:189.230911→F:65.104→U:92.027→V:60→W:240→R:112.67→T:If K≤A-T+U+V+W:Then Prog “JDF”:Return:IfEnd 第2行:400.178→A:428745.824→N:558179.143→E:226.133812→F:0→P:0→Q:156.316→L: If K≤A+L:Then Prog “XYF” :Return:IfEndA——交点法中为交点或切线所在直线上某点的里程(在直线上本程序变为积木法),线元法中为线元起点里程N——交点法中为与点A对应的x坐标,线元法中为线元起点x坐标E——交点法中为与点A对应的y坐标,线元法中为线元起点y坐标F——交点法中为切线方位角,线元法中为线元起点方位角U——第一段完全缓和曲线的长度(对称、不对称均可),无缓和曲线的输入0或用线元法V——圆曲线的长度W——第二段完全缓和曲线的长度(对称、不对称均可,无缓和曲线的输入0或用线元法R——圆曲线的半径(左转输入负值,右转输入正值)T——第一切线长或点A到直缓或直圆点的长度(在直缓或直圆点小里程方向输入负值,大里程方向输入正值)说明:(1)本篇基于本程序集中的第5篇,原第5篇中部分变量已做调整,本篇也可在9860中使用。
交点法坐标计算实例及公式
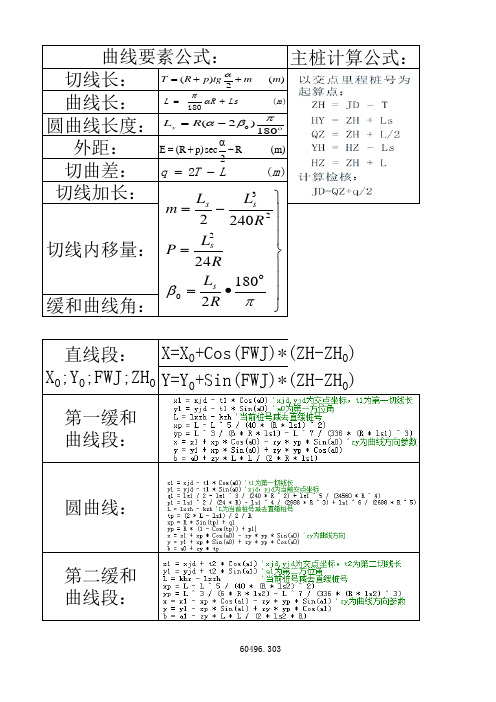
主桩计算公式:切线长:曲线长:圆曲线长度:外距:切曲差:切线加长:切线内移量:缓和曲线角:X=X 0+Cos(FWJ)*(ZH-ZH 0)Y=Y 0+Sin(FWJ)*(ZH-ZH 0)60496.303QD曲线要素公式:直线段:X 0;Y 0;FWJ;ZH 0第一缓和曲线段:圆曲线:第二缓和曲线段:)(2)(m m tg p R T ++=α)(180m Ls R L +=απο180)2(0πβα-=R L y )m (R 2sec )p R (E -α+=)(2m LT q -=⎪⎪⎪⎭⎪⎪⎪⎬⎫•==-=πβο18022424020223R L R L P R L L m s s s s2710420.530419921.016第一缓和曲线长2710752.946152.027420120.0562711595.8740.54030.912左偏45.58°387.450740.714436.66064.07534.18675.9871.3015.885°第一段387.450直线起始桩号:60496.303起始桩号(直缓):直线方位角(弧度):0.540第一方位角(弧度):基点X:2710420.5299基点X:基点Y:419921.0161基点Y:长度(选择桩号-起始桩号):0.000xp值:选择桩号:60496.303yp值:X坐标:2710420.5299长度(选择桩号-起始桩号):Y坐标:419921.0161选择桩号:X坐标:Y坐标:方位角:第一缓和曲线第一直线计算步骤:两点距离:L′=√(Xb-Xa)^2+(Yb-Ya)^2QD JD ZD坐标计算:点在缓和曲线上点位于圆曲线上l为点到坐标原点的曲线长。
半径第二缓和曲线长740.000152.027FWJ2QD 60496.3036.027ZH 60496.303345.332HY 60648.3300.796-1.000QZ 60866.660387.450YH 61084.990740.714HZ61237.017ZD 61720.89475.9871.3010.103第二段871.32660496.303起始桩号(直缓):60496.303起始桩号(缓直):0.540第一方位角(弧度):0.540第二方位角(弧度):2710420.5300基点X:2710420.5300基点X:419921.0162基点Y:419921.0162基点Y:151.867q175.987xp值:5.202p11.301yp值:152.027tp 0.103(起始桩号-选择桩号):60648.330xp 151.867选择桩号:2710553.4974yp 5.202X坐标:419994.5701长度(选择桩号-起始桩号):152.027Y坐标:25°1′34.79″选择桩号:60648.330方位角:X坐标:2710553.4975Y坐标:419994.5701方位角:25°1′34.79曲线圆曲线第二缓和骤:61237.017直线起始桩号:61237.0176.027直线方位角(弧度): 6.027*******.7683基点X:2711127.7683420021.9448基点Y:420021.9448151.867长度(选择桩号-起始桩号):0.0005.202选择桩号:61237.017152.027X坐标:2711127.768361084.990Y坐标:420021.94482710979.5343420055.3690351°13′1.73″第二直线二缓和曲线。
交点法路线计算程序(王中伟 老师作品) - 副本

右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
边 桩 坐 标 E(Y)
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
左 边 桩 坐 标
右 边 桩 坐 标
中线坐标 桩 号 切线方位角 高程
直曲表1:常规交点法路线(坐标简单型)计算程序

48.043
35.000 45.000
41.006 46.497
12.454
10.469
K0+658.889
55°06′32.1″ (Z)
60.000
35
45.826 49.200 92.710 8.633 5.689 K0+757.890
56°24′47.4″ (Y)
0.000
110.710
252°23′01.5 ″
0.000
105.905
182°01′09.9 ″
0.000
97.926
126°54′37.8 ″
57.896
132.582
183°19′25.3 ″
16.459
65.185
228°22′32.4 ″
备注 21
编制:
复核:
审核:
图号:S2-4-1
83°41′31.1″ (Y)
35.000
31.344 51.125 11.984 11.564
20°23′37.7″ (Z)
199.358
35.000 45.000
83.532 94.716
53.880 57.946
110.959
3.545
0.867
K0+547.930
70°21′51.5″ (Z)
计算方位角
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
BP 3560468.929 421168.528
K0+000
JD1 3560034.969 421099.131 K0+439.474 JD2 3560043.396 420925.435 K0+601.810 JD3 3560009.891 420819.917 K0+711.653 JD4 3559904.051 420816.185 K0+807.090 JD5 3559845.240 420894.484 K0+899.326
交点法坐标计算程序
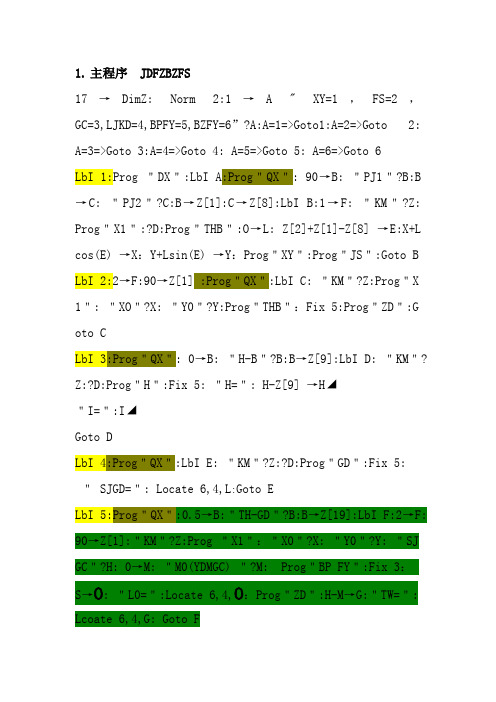
1.主程序 JDFZBZFS17→DimZ: Norm 2:1→ A " XY=1,FS=2,GC=3,LJKD=4,BPFY=5,BZFY=6”?A:A=1=>Goto1:A=2=>Goto 2: A=3=>Goto 3:A=4=>Goto 4: A=5=>Goto 5: A=6=>Goto 6LbI 1:Prog "DX":LbI A:Prog"QX": 90→B: "PJ1"?B:B →C: "PJ2"?C:B→Z[1]:C→Z[8]:LbI B:1→F: "KM"?Z: Prog"X1":?D:Prog"THB":O→L: Z[2]+Z[1]-Z[8] →E:X+L cos(E) →X:Y+Lsin(E) →Y:Prog"XY":Prog"JS":Goto B LbI 2:2→F:90→Z[1] :Prog"QX":LbI C: "KM"?Z:Prog"X 1": "XO"?X: "Y0"?Y:Prog"THB":Fix 5:Prog"ZD":G oto CLbI 3:Prog"QX": 0→B: "H-B"?B:B→Z[9]:LbI D: "KM"? Z:?D:Prog"H":Fix 5: "H=": H-Z[9] →H◢"I=":I◢Goto DLbI 4:Prog"QX":LbI E: "KM"?Z:?D:Prog"GD":Fix 5:" SJGD=": Locate 6,4,L:Goto ELbI 5:Prog"QX":0.5→B:"TH-GD"?B:B→Z[19]:LbI F:2→F: 90→Z[1]:"KM"?Z:Prog "X1":"X0"?X: "Y0"?Y: "SJ GC"?H: 0→M: "M0(YDMGC) "?M: Prog"BP FY":Fix 3:S→O: "L0=":Locate 6,4,O:Prog"ZD":H-M→G:"TW=": Lcoate 6,4,G: Goto FLbI 6:Prog"DX":LbI G:Prog"QX":LbI H:1→F:90→Z[1]:"KM"?Z: Goto G:Prog"X1":?D:Prog"THB":Prog"XY":Prog"JS":Prog"H":0→M:"M0"?M:Fix 2:H-M→T:"TW=": 6,4,T◢ Goto H2. 坐标计算次程序(THB)LbI J: If F=1:Then Prog "Z":Goto 1:Else Prog "ZX":Goto 2: IfEnd: LbI 1:I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: LbI 23.路基开挖边线及填方坡脚线放样程序程序名:BP FYLbI H: 13→L:H-M→G: Prog “W1”:If G <0:Then –G →G:G oto W:Else G →G:Goto TLbI W:Z[8]+Z[9]→A: If G >A:Then Goto 1:Else If G >Z[8]: Then Goto 2:Else Goto 3:IfEndLbI 1: L+Z[10]+Z[11]+Z[12]+( G -A-( Z[11]+Z[12])×0.03)×Z[7]+Z[9]×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 2: L+Z[10]+Z[11]+( G -Z[8]- Z[11]×0.03)×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 3: L+ G×Z[5]→S:Goto ZLbI T:Z[16]+Z[17] →B:If G >B:Then Goto 4:Else If G >Z [16]:Then Goto 5:Else Goto 6:IfEndLbI 4: L+Z[18] ×2+ (G -B-2×Z[18]×0.03)×Z[15]+ Z[17]×Z[14]+ Z[16]×Z[13]→S:Goto ZLbI 5: L+Z[18]+( G -Z[16]- Z[18]×0.03)×Z[14]+Z[16]×Z [13]→S:Goto ZLbI 6: L+ G×Z[13]→S:Goto ZLbI Z4.极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:JSX:Y:Z[11]→K:Z[12]→L:Pol(X-K, Y-L):IF J<0:Then J+360→J:IfEnd:Fix 4:” FWJ=”: J◢DMS◢Fix 5:” S=”: I◢程序名:ZDFix 3:"KM=":Locate 6,4,Z:"D=":Locate 6,4,D5.交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4) ÷2688÷R∧(3)→A(圆曲线内移量H表示缓和曲线长)H÷2-H∧(3) ÷240÷R2→B(切垂距)((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))/2688/R∧(3)) ÷Sin(Abs(P))→E(R+A)tan(Abs(P) ÷2)+B-E→T:P÷Abs(P) →W0→M:H→CIf Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEndIf Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEndIf Z≤O-T+ΠR×Abs(P) ÷180+H÷2-N÷2: Then 180(Z-O+T-0.5H) ÷R÷Π→S: A+R(1-Cos(S))→B H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P →S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSin(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3: LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H6. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9)÷3456÷R∧(4) ÷H∧(4)→A:S∧(3) ÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RS÷H→M7. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 28.路基标准半幅宽度计算程序程序名GD1→S: Prog “G1”:Z-C→E:(B-A)*E/S+A→L:9. 导线点子程序(DX)程序名:DX“X Z”?K:”YZ”?L:K→Z[11]:L→Z[12]10.高程计算子程序(H)程序名:HP rog “S1”:C-T→F:Z-F→S:C+T→E:G-TI→Q:If T=O:Then Q+SI→H:Goto 0:Else If Z<F:Then Q+SI→H:Goto 0:Else If Z≤E:Then Q+SI+S2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto ILbI I11.高程超高计算程序(I)程序名:IIf Z[3]=1:Then Prog “I1”:Goto 1: IfEndLbI 1: If W=1:Then Goto Z:Else Goto X: IfEndLbI Z:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷S+M)→V:Goto 2:IfEnd:LbI X:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×(((3((Z-C)÷S)2-2((Z-C)÷S)∧(3))×(N-M))+M)→V:Goto 2:IfEndLbI 2:Abs(D)→E:V÷E→I:I(E-K)→V15.线路选择子程序(线路选择输0时。
交点法坐标计算
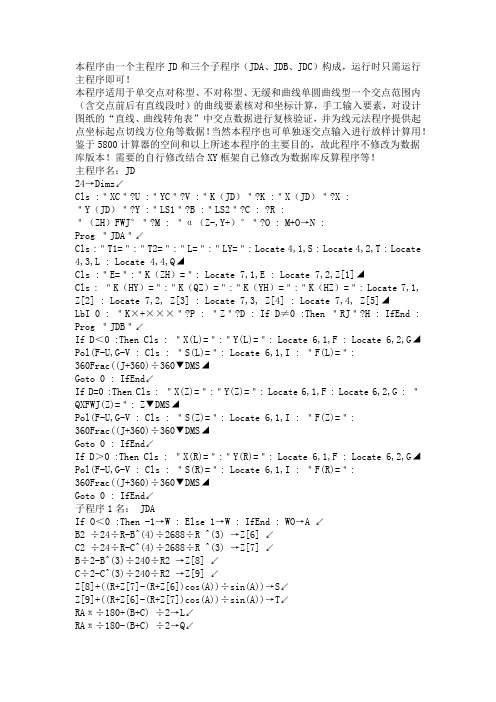
本程序由一个主程序JD和三个子程序(JDA、JDB、JDC)构成,运行时只需运行主程序即可!本程序适用于单交点对称型、不对称型、无缓和曲线单圆曲线型一个交点范围内(含交点前后有直线段时)的曲线要素核对和坐标计算,手工输入要素,对设计图纸的“直线、曲线转角表”中交点数据进行复核验证,并为线元法程序提供起点坐标起点切线方位角等数据!当然本程序也可单独逐交点输入进行放样计算用!鉴于5800计算器的空间和以上所述本程序的主要目的,故此程序不修改为数据库版本!需要的自行修改结合XY框架自己修改为数据库反算程序等!主程序名:JD24→Dimz↙Cls :"XC"?U :"YC"?V :"K(JD)"?K :"X(JD)"?X :"Y(JD)"?Y :"LS1"?B :"LS2"?C : ?R :"(ZH)FWJ°"?M : "α(Z-,Y+)°"?O : M+O→N :Prog "JDA"↙Cls :"T1=":"T2=":"L=":"LY=": Locate 4,1,S : Locate 4,2,T : Locate 4,3,L : Locate 4,4,Q◢Cls :"E=":"K(ZH)=": Locate 7,1,E : Locate 7,2,Z[1]◢Cls : "K(HY)=":"K(QZ)=":"K(YH)=":"K(HZ)=": Locate 7,1, Z[2] : Locate 7,2, Z[3] : Locate 7,3, Z[4] : Locate 7,4, Z[5]◢LbI 0 : "K×+×××"?P : "Z"?D : If D≠0 :Then "RJ"?H : IfEnd : Prog "JDB"↙If D<0 :Then Cls : "X(L)=":"Y(L)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(L)=": Locate 6,1,I : "F(L)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙If D=0 :Then Cls : "X(Z)=":"Y(Z)=": Locate 6,1,F : Locate 6,2,G : "QXFWJ(Z)=": Z▼DMS◢Pol(F-U,G-V : Cls : "S(Z)=": Locate 6,1,I : "F(Z)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙If D>0 :Then Cls : "X(R)=":"Y(R)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(R)=": Locate 6,1,I : "F(R)=":360Frac((J+360)÷360▼DMS◢Goto 0 : IfEnd↙子程序1名: JDAIf O<0 :Then -1→W : Else 1→W : IfEnd : WO→A ↙B2 ÷24÷R-B^(4)÷2688÷R ^(3) →Z[6] ↙C2 ÷24÷R-C^(4)÷2688÷R ^(3) →Z[7] ↙B÷2-B^(3)÷240÷R2 →Z[8] ↙C÷2-C^(3)÷240÷R2 →Z[9] ↙Z[8]+((R+Z[7]-(R+Z[6])cos(A))÷sin(A))→S↙Z[9]+((R+Z[6]-(R+Z[7])cos(A))÷sin(A))→T↙RAπ÷180+(B+C) ÷2→L↙RAπ÷180-(B+C) ÷2→Q↙(R+(Z[6]+Z[7])÷2)÷cos(A÷2)-R→E↙K-S→Z[1] ↙↙Z[1]+B→Z[2] ↙↙Z[2]+Q÷2→Z[3]↙Z[1]+L-C→Z[4]↙Z[4]+C→Z[5]↙子程序2名: JDBX-Scos(M)→Z[19]:Y-Ssin(M)→Z[20]↙X+Tcos(N)→Z[21]:Y+Tsin(N)→Z[22]↙If P>Z[1]:Then Goto 1 :IfEnd↙Z[1]-P→L↙X-(S+L)cos(M)+Dcos(Z+H)→F↙Y-(S+L)s in(M)+Dsin(Z+H)→G↙M→Z : Goto 5↙LbI 1 : If P>Z[2]:Then Goto 2 :IfEnd↙P-Z[1]→L→Z[12]:B→Z[13]rog"JDC"↙Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+90WL2 ÷(BRπ)→Z↙Goto 5↙LbI 2 : If P>Z[4]:Then Goto 3 :IfEnd↙P-Z[1]→L:90(2L-B)÷R÷π→Z[11]↙Rsin(Z[11])+Z[8]→Z[14]:R(1-cos(Z[11]))+Z[6]→Z[15]↙Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙M+WZ[11]→Z↙Goto 5↙LbI 3 : If P>Z[5]:Then Goto 4 :IfEnd↙Z[5]-P→L→Z[12]:C→Z[13]rog"JDC"↙Z[21]-Z[14]cos(N)-WZ[15]sin(N)+Dcos(Z+H)→F↙Z[22]-Z[14]sin(N)+WZ[15]cos(N)+Dsin(Z+H)→G↙N-90WL2 ÷(CRπ)→Z↙Goto 5↙LbI 4 : P-Z[5]→L↙X+(T+L)cos(N)+Dcos(Z+H)→F↙Y+(T+L)sin(N)+Dsin(Z+H)→G↙N→Z↙Goto 5↙LbI 5 : 360Frac((Z+360)÷360→Z↙子程序3名: JDCIf Z[12]=0 :T hen 0→Z[14]: 0→Z[15]:Else↙Z[12]- Z[12]^(5)÷40÷(RZ[13])2+ Z[12]^(9)÷3456÷(RZ[13])^(4)→Z[14]↙Z[12]^(3)÷6÷(RZ[13])-Z[12]^(7)÷336÷(RZ[13])^(3)+ Z[12]^(11) ÷42240÷(RZ[13])^(5)→Z[15] ↙IfEnd↙程序说明:已知数据输入:XC ? 测站X坐标YC ? 测站Y坐标K(JD)?交点桩号X(JD)?交点X坐标交点法线路坐标计算Y(JD)?交点Y坐标LS1 ?第一缓和曲线长度LS2 ?第二缓和曲线长度R ? 圆曲线半径(ZH)FWJ°?交点前(即前交点至本交点也即ZH点)的正切线方位角α(Z-,Y+)?本交点处线路转角(左转为负,右转为正,度分秒输入)K×+×××? 待求桩号Z ?待求桩号距中距离(左负值,右正值,中为0)RJ ?斜交右角(线路切线前进方向与边桩右侧夹角)计算结果显示:T1=第一切线长T2=第二切线长L=曲线总长LY=圆曲线长E=曲线外距K(ZH)=直缓点桩号K(HY)=缓圆点桩号K(QZ)=曲中点桩号K(YH)=圆缓点桩号K(HZ)=缓直点桩号X= Y=待求点的坐标(其中:L-左 Z-中 R-右)QXFWJ(Z)=待求点的中桩切线方位角(当求中桩坐标时显示)S= F=测站至待求点的水平距离、方位角(其中L-左 Z-中 R-右)。
jc版交点法坐标计算及高程

JD91 E 桩 JD92 N E 桩 JD93 N E 桩 JD94 N E 桩 JD95 N E 桩 JD96 N E 桩 JD97 N E 桩 JD98 N E 桩 JD99 N E 桩 JD100 N E
K41+034.687 2567649.417 433570.696 K41+220.234 2567539.166 433400.798 K41+460.225 2567338.066 433267.361 K41+615.396 2567262.918 433129.084 K41+844.602 2567122.817 432947.349 K41+957.674 2567123.791 432831.02 K42+094.786
直线曲线及转角表
交点号 交点位置 交点间距 (m) 计算方位角 (度分标) 曲线间直 线长(m) 转角 (度分标) 切线长度 半径 T1 R1 Ry T2 R2 曲线要素值(m) 回旋线参 曲线长度 数 A1 Ls1 A2 Ly Ls2 曲线主要位置 第一回旋线终点 或圆曲线起点 圆曲线终点或第 二回旋线起点 备注 曲线总长 外距 第一回旋线起点 第二回旋线终点
断链信息 255.873 235°55′25.32〃 196.674 59.199 右24°31′39.07〃 325.854 260°27′4.38〃 183.857 左72°35′13.91〃 274.165 187°51′50.48〃 101.355 右92°51′13.59〃 165.041 280°43′4.07〃 0.005 左51°34′2.34〃 156.377 229°9′1.73〃 0.002 右25°20′53.72〃 247.254 254°29′55.45〃 41.136 左93°12′9.66〃 198.701 161°17′45.8〃 (0.001) 右75°43′24.28〃 202.535 237°1′10.08〃 61.982 左23°27′13.6〃 241.343 213°33′56.48〃 99.914 右27°54′43.22〃 157.378 241°28′39.7〃 (0.001) 左9°6′23.83〃 229.469 232°22′15.87〃 86.625 右38°6′31.1〃 116.333 270°28′46.97〃 0.000 左13°24′14.6〃 137.496 257°4′32.37〃 56.048 60.285 56.048 327.9 107.129 82.56 60.285 108.7 69.944 107.129 74.819 82.56 722.6 190.083 69.944 66.611 74.819 200 100 190.083 73.951 66.611 200 100 100 124.757 73.951 65 54.083 100 81.361 124.757 75.017 81.361 90.031 75.017 82.798 90.031 59.199 82.798 84.853 40 37.055 84.853 64.807 40 60 28.682 64.807 53.245 60 45 57.098 53.245 71.633 45 50 42.366 71.633 116.912 50 60 40.784 116.912 68.29 60 50 50 45 40.905 45 50 31.869 50 50 47.431 50 50 64.856 50 45 27.309 45 35 41.712 35 147.431 6.62 =
交点法、线元法坐标计算精编版
3、交点法、线元法坐标计算坐标计算是根据图纸中“直线及曲线转角一览表”提供的数据计算道路中桩坐标,然后和图纸提供的“逐桩坐标表”比对,如果一样则说明输入平曲线参数输入正确,可以计算边桩坐标和其他结构物坐标了;如果中桩坐标不一样,一般是平曲线参数输入有误,需要重新检查输入,另一种结果是图纸有错,这种情况少见,但不代表没有。
“直线及曲线转角一览表”和“逐桩坐标表”见附件1、附件2。
线元法是以路线的起点坐标、方位角、起终点桩号等节点元素来计算出要求的坐标;交点法是以路线的交点要素和路线的主要要素来求得坐标。
①交点法交点:路线的转折点,路线改变方向是相邻两直线的延长线相交的点。
用JD表示,有些图纸上用IP表示。
看下图:交点是针对曲线的(包含圆曲线和缓和曲线),一段曲线就有一个交点。
交点参数有:坐标(X,Y)、交点桩号、转角值、圆曲线半径R、缓和曲线长度。
教学提供软件(轻松测量、双心软件、测量工具)交点法曲线要素输入说明:1、QD起点坐标:起点坐标必须在直线段上,或填写前一交点的坐标。
2、JD交点曲线要素:(1)交点桩号(2)交点坐标(X,Y)(3)曲线半径R(4)第一缓和曲线长度LS1,若为0,输入0,不能为空。
(5)第二缓和曲线长度LS2,若为0,输入0,不能为空。
3、ZD终点坐标:终点坐标也必须在直线段上,或填写后一交点的坐标。
检核数据是否输入正确的方法:软件生成的圆曲线要素中切线长、外距、交点里程:注意校正起点里程、等与设计图纸是否一致。
如果上述数据和图纸不一样,请认真检查有错误的交点处的数据输入是否正确,如果输入没有错误,请考虑是否包含不完整缓和曲线,使用公式A²=R*Ls检查是否包含不完整缓和曲线。
如果包含不完整缓和曲线,那就需要用线元法也叫积木法计算了。
有的设计院给出的直曲表是整条设计线路的直曲表的一部分,以其中某个交点作为起始点的话,起始里程有时候需要校正,当然,并不是每个图纸给出的起点里程都需要校正,大多数图纸的起点里程已经被设计院校正过,我们输入平曲线的时候需要验证一下。
交点法坐标计算程序

1.主程序 JDFZBZFS17→DimZ: Norm 2:1→ A " XY=1,FS=2,GC=3,LJKD=4,BPFY=5,BZFY=6”?A:A=1=>Goto1:A=2=>Goto 2: A=3=>Goto 3:A=4=>Goto 4: A=5=>Goto 5: A=6=>Goto 6LbI 1:Prog "DX":LbI A:Prog"QX": 90→B: "PJ1"?B:B →C: "PJ2"?C:B→Z[1]:C→Z[8]:LbI B:1→F: "KM"?Z: Prog"X1":?D:Prog"THB":O→L: Z[2]+Z[1]-Z[8] →E:X+L cos(E) →X:Y+Lsin(E) →Y:Prog"XY":Prog"JS":Goto B LbI 2:2→F:90→Z[1] :Prog"QX":LbI C: "KM"?Z:Prog"X 1": "XO"?X: "Y0"?Y:Prog"THB":Fix 5:Prog"ZD":G oto CLbI 3:Prog"QX": 0→B: "H-B"?B:B→Z[9]:LbI D: "KM"? Z:?D:Prog"H":Fix 5: "H=": H-Z[9] →H◢"I=":I◢Goto DLbI 4:Prog"QX":LbI E: "KM"?Z:?D:Prog"GD":Fix 5:" SJGD=": Locate 6,4,L:Goto ELbI 5:Prog"QX":0.5→B:"TH-GD"?B:B→Z[19]:LbI F:2→F: 90→Z[1]:"KM"?Z:Prog "X1":"X0"?X: "Y0"?Y: "SJ GC"?H: 0→M: "M0(YDMGC) "?M: Prog"BP FY":Fix 3:S→O: "L0=":Locate 6,4,O:Prog"ZD":H-M→G:"TW=": Lcoate 6,4,G: Goto FLbI 6:Prog"DX":LbI G:Prog"QX":LbI H:1→F:90→Z[1]:"KM"?Z: Goto G:Prog"X1":?D:Prog"THB":Prog"XY":Prog"JS":Prog"H":0→M:"M0"?M:Fix 2:H-M→T:"TW=": 6,4,T◢ Goto H2. 坐标计算次程序(THB)LbI J: If F=1:Then Prog "Z":Goto 1:Else Prog "ZX":Goto 2: IfEnd: LbI 1:I+D×COS(Z[2]+Z[1]) →X: J+D×Sin(Z[2]+Z[1]) →Y: LbI 23.路基开挖边线及填方坡脚线放样程序程序名:BP FYLbI H: 13→L:H-M→G: Prog “W1”:If G <0:Then –G →G:G oto W:Else G →G:Goto TLbI W:Z[8]+Z[9]→A: If G >A:Then Goto 1:Else If G >Z[8]: Then Goto 2:Else Goto 3:IfEndLbI 1: L+Z[10]+Z[11]+Z[12]+( G -A-( Z[11]+Z[12])×0.03)×Z[7]+Z[9]×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 2: L+Z[10]+Z[11]+( G -Z[8]- Z[11]×0.03)×Z[6]+Z[8]×Z[5] →S:Goto ZLbI 3: L+ G×Z[5]→S:Goto ZLbI T:Z[16]+Z[17] →B:If G >B:Then Goto 4:Else If G >Z [16]:Then Goto 5:Else Goto 6:IfEndLbI 4: L+Z[18] ×2+ (G -B-2×Z[18]×0.03)×Z[15]+ Z[17]×Z[14]+ Z[16]×Z[13]→S:Goto ZLbI 5: L+Z[18]+( G -Z[16]- Z[18]×0.03)×Z[14]+Z[16]×Z [13]→S:Goto ZLbI 6: L+ G×Z[13]→S:Goto ZLbI Z4.极坐放样计算程序(计算放样点至置仪点方位角及距离)程序名:JSX:Y:Z[11]→K:Z[12]→L:Pol(X-K, Y-L):IF J<0:Then J+360→J:IfEnd:Fix 4:” FWJ=”: J◢DMS◢Fix 5:” S=”: I◢程序名:ZDFix 3:"KM=":Locate 6,4,Z:"D=":Locate 6,4,D5.交点法正算子程序(Z)程序名:ZH2÷R÷24-H∧(4) ÷2688÷R∧(3)→A(圆曲线内移量H表示缓和曲线长)H÷2-H∧(3) ÷240÷R2→B(切垂距)((H2-N2)÷24÷R)÷Sin(Abs(P))-((H∧(4)-N∧(4))/2688/R∧(3)) ÷Sin(Abs(P))→E(R+A)tan(Abs(P) ÷2)+B-E→T:P÷Abs(P) →W0→M:H→CIf Z≤O-T:Then Z-O→S:G→Z[2]:Goto 2: IfEndIf Z≤O-T+H:Then Z-O+T→S:Prog “HX”:G+WK→Z[2]:Goto 4:IfEndIf Z≤O-T+ΠR×Abs(P) ÷180+H÷2-N÷2: Then 180(Z-O+T-0.5H) ÷R÷Π→S: A+R(1-Cos(S))→B H÷2-H∧(3) ÷240÷R2+Rsin(S)→A:R→M:G+WS→Z[2]:Goto 4: IfEnd:O-T+ΠR×Abs(P)÷180+H÷2+N÷2-Z→S:(R+N2÷R÷24-N∧(4)÷2688÷R∧(3))tan(Abs(P) ÷2)+N÷2-N∧(3) ÷240÷R2+E→T :N→H:Prog “HX”:G+P →S:S-WK→Z[2]:U+(T-A)Cos(S)-WBSin(S)→I:V+(T-A)Sin(S)+WBcos(S)→J:Goto 3:LbI 4:U+(A-T)cos(G)-WBsin(G)→I:V+(A-T)Sin(G)+WBcos(G) →J: Goto 3: LbI 2:U+Scos(Z[2])→I:V+Ssin(Z[2]) →J: LbI 3:C→H6. 交点法缓和段转化子程序(HX)程序名:HXS-S∧(5) ÷40÷R2÷H2+S∧(9)÷3456÷R∧(4) ÷H∧(4)→A:S∧(3) ÷6÷R÷H-S∧(7) ÷336÷R∧(3) ÷H∧(3)+S∧(11) ÷42240÷R∧(5) ÷H∧(5)→B:90S2÷Π÷R÷H→K:RS÷H→M7. 交点法反算子程序(ZX)程序名:ZXZ:0→D:LbI 0:Prog “Z”:Pol(X-I,Y-J):J-Z[2] →J:Isin(J) →S:Icos(J) →I:If Abs(I)<0.1:Then Z+I→Z:S→D:Goto 2:Else Goto 1: LbI 1:If M=0:Then Z+I→Z:Goto 0:Eles Pol(M-WS,I):(JMΠ)/180→I:Z+I→Z:Goto 0:IfEndLbI 28.路基标准半幅宽度计算程序程序名GD1→S: Prog “G1”:Z-C→E:(B-A)*E/S+A→L:9. 导线点子程序(DX)程序名:DX“X Z”?K:”YZ”?L:K→Z[11]:L→Z[12]10.高程计算子程序(H)程序名:HP rog “S1”:C-T→F:Z-F→S:C+T→E:G-TI→Q:If T=O:Then Q+SI→H:Goto 0:Else If Z<F:Then Q+SI→H:Goto 0:Else If Z≤E:Then Q+SI+S2÷2÷R→H:Goto 0:LbI 0:H:If D=0:Then Goto I:Else Prog “I”:H+V→H:Goto ILbI I11.高程超高计算程序(I)程序名:IIf Z[3]=1:Then Prog “I1”:Goto 1: IfEndLbI 1: If W=1:Then Goto Z:Else Goto X: IfEndLbI Z:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×((N-M)×(Z-C)÷S+M)→V:Goto 2:IfEnd:LbI X:If S=0:Then Abs(D)×M→V:Goto 2:Else Abs(D)×(((3((Z-C)÷S)2-2((Z-C)÷S)∧(3))×(N-M))+M)→V:Goto 2:IfEndLbI 2:Abs(D)→E:V÷E→I:I(E-K)→V15.线路选择子程序(线路选择输0时。
5800(交点法)坐标计算及反算
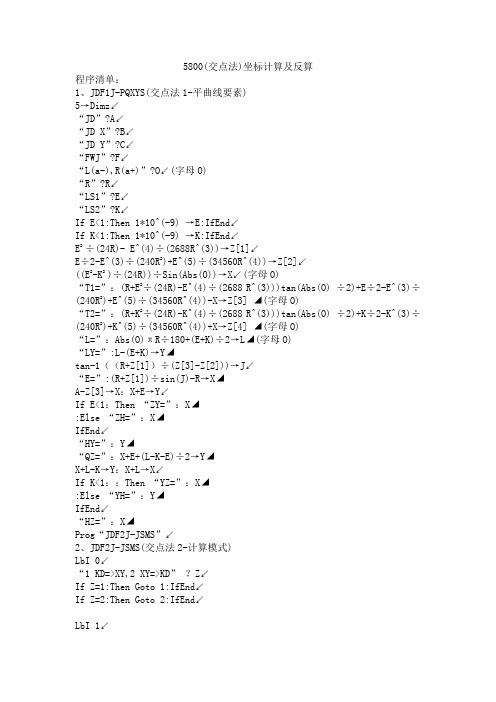
5800(交点法)坐标计算及反算程序清单:1、JDF1J-PQXYS(交点法1-平曲线要素)5→Dimz↙“JD”?A↙“JD X”?B↙“JD Y”?C↙“FWJ”?F↙“L(a-),R(a+)”?O↙(字母O)“R”?R↙“LS1”?E↙“LS2”?K↙If E<1:Then 1*10^(-9) →E:IfEnd↙If K<1:Then 1*10^(-9) →K:IfEnd↙E2 ÷(24R)- E^(4)÷(2688R^(3))→Z[1]↙E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))→Z[2]↙((E2-K2 )÷(24R))÷Sin(Abs(O))→X↙(字母O)“T1=”:(R+E2÷(24R)-E^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+E÷2-E^(3)÷(240R2)+E^(5)÷(34560R^(4))-X→Z[3] ◢(字母O)“T2=”:(R+K2÷(24R)-K^(4)÷(2688 R^(3)))tan(Abs(O) ÷2)+K÷2-K^(3)÷(240R2)+K^(5)÷(34560R^(4))+X→Z[4] ◢(字母O)“L=”:Abs(O)πR÷180+(E+K)÷2→L◢(字母O)“LY=”:L-(E+K)→Y◢tan-1((R+Z[1])÷(Z[3]-Z[2]))→J↙“E=”:(R+Z[1])÷sin(J)-R→X◢A-Z[3]→X:X+E→Y↙If E<1:Then “ZY=”:X◢:Else “ZH=”:X◢IfEnd↙“HY=”:Y◢“QZ=”:X+E+(L-K-E)÷2→Y◢X+L-K→Y:X+L→X↙If K<1::Then “YZ=”:X◢:Else “YH=”:Y◢IfEnd↙“HZ=”:X◢Prog“JDF2J-JSMS”↙2、JDF2J-JSMS(交点法2-计算模式)LbI 0↙“1 KD=>XY,2 XY=>KD”?Z↙If Z=1:Then Goto 1:IfEnd↙If Z=2:Then Goto 2:IfEnd↙LbI 1↙“JS K”?P:“BZ(m)”?D:“BJ(°)”?W↙Prog“JDF3JPZS”↙“X=”:X◢“Y=”:Y◢If Z=1: Then Goto 1:Goto 1:IfEnd↙LbI 2↙“X”?X:“Y”?Y:“BJ(°)”?W↙Prog“JDF4JPFS”↙“JS K”:P◢“BZ(m)=”:D◢If Z=2: Then Goto 2:Goto 2:IfEnd↙3、JDF3JPZS (交点法3平曲线正算)LbI 1↙F→J↙B-Z[3]cos(F)→X↙C-Z[3]sin(F)→Y↙E→G↙If P≤A-Z[3]:Then A-Z[3]-P→I:-I→M:0→N:F+W→H: Goto5:IfEnd↙(数字0)If P≤A-Z[3]+E:Then P-A+Z[3]→I:90I2÷(REπ)→H: O<0=>-H→H:(前面为字母0,后面为数字0)H+W+F→H: Goto 3: IfEnd↙If P≤A-Z[3]+L-K:Then P-A+Z[3]-E→I: Goto 4:Else Goto2: IfEnd↙LbI 2↙B+Z[4]cos(F+O)→X↙(字母0)C+Z[4]sin(F+O)→Y↙(字母0)F+O+180→J↙(字母0)K→G↙If P≤A-Z[3]+L:Then A-Z[3]+L-P→I:90I2÷(RKπ)→H: O>0=>-H→H:(前面为字母0,后面为数字0)H+J+W+180→H: Goto 3 :Else P-A+Z[3]-L→I:-I→M:0→N:(数字0)J+W+180→H: Goto 5:IfEnd↙LbI 3↙I-I^(5)÷(40(RG)2)→M↙I^(3)÷(6GR)-I^(7)÷(336(RG)^(3))→N↙Goto 5↙LbI 4↙(E+2I)×90÷(πR)→H↙Rsin(H)+Z[2]→M↙R(1-cos(H))+Z[1]→N↙O<0=>-H→H↙(前面为字母0,后面为数字0)J+H+W→H↙Goto 5↙LbI 5 ↙If P≤A-Z[3]+L-K:Then O<0(前面为字母0,后面为数字0)=>-N→N:Else O>0(前面为字母0,后面为数字0)=>-N→N: Goto 6: IfEnd↙LbI 6 ↙X+Mcos(J)-Nsin(J)+Dcos(H)→X↙Y+Msin(J)+Ncos(J)+Dsin(H)→Y↙4、JDF4JPFS(交点法4平曲线反算)X→U:Y→V:0→D:F-W→J↙(数字0)A+(Y-C)cos(J)-(X-B)sin(J)→P↙LbI 1↙Prog“JDF3JPZS”↙H-180→J↙(V-Y)cos(J)-(U-X)sin(J)→I↙If Abs(I)<10^(-4):Then Goto 2:Else P+I→P: Goto1: IfEnd↙LbI 2↙(V-Y)÷sin(H)→D↙程序简介本套程序共有1个主程序,3个子程序,适用于CASIO-5800用户。
交点坐标怎么求

交点坐标怎么求
交点坐标怎么求:
交点坐标计算公式:A2x+B2y+C2=0。
交点式是抛物线的一种数学表达形式,即用抛物线与x轴的两个交点来表示抛物线的函数形式。
抛物线是指平面内到一个定点F(焦点)和一条定直线l(准线)距离相等的点的轨迹。
它有许多表示方法,例如参数表示,标准方程表示等等。
它在几何光学和力学中有重要的用处。
函数(function)的定义通常分为传统定义和近代定义,函数的两个定义本质是相同的,只是叙述概念的出发点不同,传统定义是从运动变化的观点出发,而近代定义是从集合、映射的观点出发。
函数的近代定义是给定一个数集A,假设其中的元素为x,对A中的元素x施加对应法则f,记作f(x),得到另一数集B,假设B中的元素为y,则y 与x之间的等量关系可以用y=f(x)表示,函数概念含有三个要素:定义域A、值域B和对应法则f。
其中核心是对应法则f,它是函数关系的本质特征。
1。
交点|只给两个交点要素如何计算所包含范围的坐标
交点|只给两个交点要素如何计算所包含范围的坐标专栏纬地道路横断面土石方计算专题课作者:山西测量韩老师¥2491人已购查看实际高速公路或者铁路修建中,道路全长一般少则几十公里,多则几百公里,导致平曲线表数据众多,有的甚至有100多个交点数据,而实际施工中,一个工程一般分为好几个标段施工,一个标段就有几公里或者十几公里,测量人员所在的施工单位也就做一个标段,所以我们测量人员在计算坐标时只需要计算自己标段坐标就可以,现在通用的电脑软件(轻松测量、双心软件)或者手机软件(测量员、工地通路测)使用交点法计算时要求起终点坐标必须是直线上的点,而设计图纸只会提供给你平曲线表,一个起点,一个终点,其他都是交点,交点不能作为软件输入的起终点坐标计算,又要计算自己标段的坐标,又不想全部输入整个的平曲线表,这就需要我们计算属于我们标段的起点交点的ZH点或者ZY点坐标和终点交点的HZ或者YZ点的坐标。
①交点的计算范围所谓交点计算范围,是指利用当前的交点数据,可有效地计算出中桩坐标的桩号范围。
可以容易地得知,一般情况下,交点计算范围包括本交点的平曲线,以及本平曲线之前和之后的直线段(如果有的话)。
我们可以看出,根据交点计算范围的定义,相邻两交点曲线间若存在直线段,则该直线段则成为相邻两交点的重复计算范围,即既可在前一交点内计算,也可在后一交点内计算,并且均可计算出准确的结果。
②计算思路计算本交点的ZH点或者ZY点就是一个坐标正算的一个过程,交点与ZH或者ZY点的距离就是该交点圆曲线的切线长,方位角就是上一交点与本交点两点连线的方位角。
就是给了你一个起点坐标和一段距离、方位角,求距离终点的坐标。
对于大多数实际平曲线计算中,方位角数据会在最后平曲线表最后一栏给出,可以直接应用,但是对于光给了单交点数据的,方位角就需要我们去计算。
计算思路:通过已知的两个交点坐标反算得出方位角,然后通过本交点数据表中转角值计算本交点与上一交点的方位角,也就是本交点与ZH点或者ZY点连线的方位角。
两条直线的交点坐标与距离公式
两条直线的交点坐标与距离公式一、平面直线的交点坐标计算方法在平面几何中,两条直线的交点即为它们的方程组的解。
假设有两条直线,直线1的方程为a1x+b1y+c1=0,直线2的方程为a2x+b2y+c2=0。
其中a1、b1、c1、a2、b2和c2都是已知的常数。
要求两条直线的交点坐标,可以使用消元法和代入法进行计算。
1.消元法消元法是通过将一个方程乘以适当的系数,使得方程的其中一项系数与另一个方程的对应系数相等,以消去一个未知数。
然后将消去后的方程代入到另一个方程中解得另一个未知数,从而求得交点坐标。
首先选择一个方程,例如直线1的方程a1x+b1y+c1=0作为基准,通过乘以a2和b1使得两个方程的x系数相等,即a1*a2*x+b1*a2*y+c1*a2=a2*a1*x+b2*a1*y+c2*a1,然后再乘以b2和b1使得两个方程的y系数相等,即a1*a2*x*b2+b1*a2*y*b2+c1*a2*b2=a2*a1*x*b2+b2*a1*y*b2+c2*a1*b2、通过将两个方程相减消去x的系数,即得到一个只含有y的方程,然后通过解这个方程来求得y的值。
将求得的y的值代入到任意一个方程中,即可求得x的值。
进而得到交点坐标。
2.代入法代入法是通过将一个方程的未知数表示为另一个方程的函数,再将其代入到另一个方程中,求得另一个方程的解。
从而求得未知数的值。
假设直线1的方程为a1x+b1y+c1=0,直线2的方程为a2x+b2y+c2=0,选择其中一个方程(例如直线1的方程)中未知数x表示为y的函数,即x=(c1-b1y)/a1、将这个式子代入到另一个方程(例如直线2的方程)中,得到一个只含有y的方程。
然后解这个方程可以得到y的值。
将求得的y的值代入到x=(c1-b1y)/a1中,即可求得x的值。
从而得到交点坐标。
以上就是求解两条直线交点坐标的两种方法。
二、两条直线之间的距离公式两条直线之间的距离可以使用点到直线的距离公式进行计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本程序由一个主程序JD和三个子程序(JDA、JDB、JDC)构成,运行时只需运行主程序即可!
本程序适用于单交点对称型、不对称型、无缓和曲线单圆曲线型一个交点范围内(含交点前后有直线段时)的曲线要素核对和坐标计算,手工输入要素,对设计图纸的“直线、曲线转角表”中交点数据进行复核验证,并为线元法程序提供起点坐标起点切线方位角等数据!当然本程序也可单独逐交点输入进行放样计算用!鉴于5800计算器的空间和以上所述本程序的主要目的,故此程序不修改为数据库版本!需要的自行修改结合XY框架自己修改为数据库反算程序等!
主程序名:JD
24→Dimz↙
Cls :"XC"?U :"YC"?V :"K(JD)"?K :"X(JD)"?X :
"Y(JD)"?Y :"LS1"?B :"LS2"?C : ?R :
"(ZH)FWJ°"?M : "α(Z-,Y+)°"?O : M+O→N :
Prog "JDA"↙
Cls :"T1=":"T2=":"L=":"LY=": Locate 4,1,S : Locate 4,2,T : Locate 4,3,L : Locate 4,4,Q◢
Cls :"E=":"K(ZH)=": Locate 7,1,E : Locate 7,2,Z[1]◢
Cls : "K(HY)=":"K(QZ)=":"K(YH)=":"K(HZ)=": Locate 7,1, Z[2] : Locate 7,2, Z[3] : Locate 7,3, Z[4] : Locate 7,4, Z[5]◢
LbI 0 : "K×+×××"?P : "Z"?D : If D≠0 :Then "RJ"?H : IfEnd : Prog "JDB"↙
If D<0 :Then Cls : "X(L)=":"Y(L)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(L)=": Locate 6,1,I : "F(L)=":
360Frac((J+360)÷360▼DMS◢
Goto 0 : IfEnd↙
If D=0 :Then Cls : "X(Z)=":"Y(Z)=": Locate 6,1,F : Locate 6,2,G : "QXFWJ(Z)=": Z▼DMS◢
Pol(F-U,G-V : Cls : "S(Z)=": Locate 6,1,I : "F(Z)=":
360Frac((J+360)÷360▼DMS◢
Goto 0 : IfEnd↙
If D>0 :Then Cls : "X(R)=":"Y(R)=": Locate 6,1,F : Locate 6,2,G◢Pol(F-U,G-V : Cls : "S(R)=": Locate 6,1,I : "F(R)=":
360Frac((J+360)÷360▼DMS◢
Goto 0 : IfEnd↙
子程序1名: JDA
If O<0 :Then -1→W : Else 1→W : IfEnd : WO→A ↙
B2 ÷24÷R-B^(4)÷2688÷R ^(3) →Z[6] ↙
C2 ÷24÷R-C^(4)÷2688÷R ^(3) →Z[7] ↙
B÷2-B^(3)÷240÷R2 →Z[8] ↙
C÷2-C^(3)÷240÷R2 →Z[9] ↙
Z[8]+((R+Z[7]-(R+Z[6])cos(A))÷sin(A))→S↙
Z[9]+((R+Z[6]-(R+Z[7])cos(A))÷sin(A))→T↙
RAπ÷180+(B+C) ÷2→L↙
RAπ÷180-(B+C) ÷2→Q↙
(R+(Z[6]+Z[7])÷2)÷cos(A÷2)-R→E↙
K-S→Z[1] ↙↙
Z[1]+B→Z[2] ↙↙
Z[2]+Q÷2→Z[3]↙
Z[1]+L-C→Z[4]↙
Z[4]+C→Z[5]↙
子程序2名: JDB
X-Scos(M)→Z[19]:
Y-Ssin(M)→Z[20]↙
X+Tcos(N)→Z[21]:
Y+Tsin(N)→Z[22]↙
If P>Z[1]:Then Goto 1 :IfEnd↙
Z[1]-P→L↙
X-(S+L)cos(M)+Dcos(Z+H)→F↙
Y-(S+L)s in(M)+Dsin(Z+H)→G↙
M→Z : Goto 5↙
LbI 1 : If P>Z[2]:Then Goto 2 :IfEnd↙
P-Z[1]→L→Z[12]:B→Z[13]rog"JDC"↙
Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙
Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙
M+90WL2 ÷(BRπ)→Z↙
Goto 5↙
LbI 2 : If P>Z[4]:Then Goto 3 :IfEnd↙
P-Z[1]→L:90(2L-B)÷R÷π→Z[11]↙
Rsin(Z[11])+Z[8]→Z[14]:R(1-cos(Z[11]))+Z[6]→Z[15]↙
Z[19]+Z[14]cos(M)-WZ[15]sin(M)+Dcos(Z+H)→F↙
Z[20]+Z[14]sin(M)+WZ[15]cos(M)+Dsin(Z+H)→G↙
M+WZ[11]→Z↙
Goto 5↙
LbI 3 : If P>Z[5]:Then Goto 4 :IfEnd↙
Z[5]-P→L→Z[12]:C→Z[13]rog"JDC"↙
Z[21]-Z[14]cos(N)-WZ[15]sin(N)+Dcos(Z+H)→F↙
Z[22]-Z[14]sin(N)+WZ[15]cos(N)+Dsin(Z+H)→G↙
N-90WL2 ÷(CRπ)→Z↙
Goto 5↙
LbI 4 : P-Z[5]→L↙
X+(T+L)cos(N)+Dcos(Z+H)→F↙
Y+(T+L)sin(N)+Dsin(Z+H)→G↙
N→Z↙
Goto 5↙
LbI 5 : 360Frac((Z+360)÷360→Z↙
子程序3名: JDC
If Z[12]=0 :T hen 0→Z[14]: 0→Z[15]:Else↙
Z[12]- Z[12]^(5)÷40÷(RZ[13])2+ Z[12]^(9)÷3456÷(RZ[13])^(4)
→Z[14]↙
Z[12]^(3)÷6÷(RZ[13])-Z[12]^(7)÷336÷(RZ[13])^(3)+ Z[12]^(11) ÷42240÷(RZ[13])^(5)→Z[15] ↙
IfEnd↙
程序说明:
已知数据输入:
XC ? 测站X坐标
YC ? 测站Y坐标
K(JD)?交点桩号
X(JD)?交点X坐标
交点法线路坐标计算
Y(JD)?交点Y坐标
LS1 ?第一缓和曲线长度
LS2 ?第二缓和曲线长度
R ? 圆曲线半径
(ZH)FWJ°?交点前(即前交点至本交点也即ZH点)的正切线方位角
α(Z-,Y+)?本交点处线路转角(左转为负,右转为正,度分秒输入)K×+×××? 待求桩号
Z ?待求桩号距中距离(左负值,右正值,中为0)
RJ ?斜交右角(线路切线前进方向与边桩右侧夹角)
计算结果显示:
T1=第一切线长
T2=第二切线长
L=曲线总长
LY=圆曲线长
E=曲线外距
K(ZH)=直缓点桩号
K(HY)=缓圆点桩号
K(QZ)=曲中点桩号
K(YH)=圆缓点桩号
K(HZ)=缓直点桩号
X= Y=待求点的坐标(其中:L-左 Z-中 R-右)
QXFWJ(Z)=待求点的中桩切线方位角(当求中桩坐标时显示)
S= F=测站至待求点的水平距离、方位角(其中L-左 Z-中 R-右)。