第13讲 最小方差调节器和自校正调节器
自适应控制--极点配置自校正
A F 1zdBGA m A 0
degF1 degB1 d 1
(14)
degGdegA1
并且右边的阶次小于等于左边阶次,即
d egA 0„d egA F 1d egA m
(15)
现将以上叙述归纳一下:
已知:过程多项式A、z-d和B;
性能要求:期望传递函数分母多项式Am;
1) 对多项式B进行因式分解,BBB,求
(3-2)
其中 F(z1)、R(z1) 和 G ( z 1 ) 为待定多项式,且 F ( z 1 ) 为首一多项式, y r ( k ) 为参考 输入。
这样构成的控制系统方框图见图2,表达式如下。
24
yr (k)
R( z 1 ) F (z1)
(k)
1 A( z 1 )
u(k)
y(k)
zd B(z1)
然后在式(10)中,假定它的左右两边各项有相同阶次,进而确 定和G的阶次,再根据左右两边相同阶次的系数应相等列代数方
程,并解之。
例1 极点配置设计1
设有被控对象:
( 1 1 .3 z 1 0 .3 z 2 ) y ( k ) ( z 2 1 .5 z 3 ) u ( k ) ( k )
两种自校正控制方法 间接自校正控制:按“模型参数-控制器参数-控制量算法”过程获得
的控制量,由于控制器参数是通过模型参数估计间接得到的故取名间接自校正 控制,又由于模型参数有明确的表达式,故又称为显式自校正控制。特点:直 观清晰,便于模块化设计,但计算量大。
直接自校正控制:不用估计模型参数,而是通过输入输出信息直接估计
则反馈系统的系统矩阵为:
0
1
0
L
0
0
1
L
第3章自校正算法讲解

(6)应注意的问题
①控制信号可能过大。
u * (k) 1 T (k)
b0 ②对于非最小相位系统,采用自校正调节器还 会带来控制系统的不稳定,即上述自校正调节 器不适用于非最小相位系统。
3.3 广义最小方差自校正控制器
1.对控制量加以约束的最小方差调节器
(1)设计思想 为了克服非最小相位系统对自校正调节器带来的
1) 1)
u(k
-
d)
+
C (zA(z -
1) 1)
w(k
)
(2)假设条件
①被控对象的纯迟延时间d以及多项式A、 B、C的阶次和系数都是已知的; ②被控对象模型是最小相位系统,即多项 式B的所有零点位于单位圆内;
③多项式C的所有零点位于单位圆内;
④{w(k)}是均值为零,方差为2。
3.1 最小方差自校正调节器(续)
D( z 1 )u(k )
E ( z 1 ) C ( z 1 )
y(k)
J
D(z1)w(k d ) 2
E ( z 1 ) C ( z 1 )
y(k)
B( z 1 ) D( z 1 ) C ( z 1 )
u(k)
2
第三章 自校正控制算法
主要内容
1.最小方差自校正调节器 2.广义最小方差控制器 3.极点配置的自校正调节器
3.1 最小方差自校正调节器
1. 系统结构
u(k )
扰动
y(k)
被控对象
参数估计器
ˆ
自适应律
c
控制器
3.1 最小方差自校正调节器(续)
2. 最小方差控制算法
调节器及调节作用规律

K p测
K F测 l2 F反 l3
F为波纹管的截面积,两者一般相等
l为力臂,一般固定不变
K为负数—负作用(作用方式)
§1-3-2 比例作用规律
DLMU
K F测 l2 F反 l3
如何调整比例带(比例系数)?
改变反馈力臂的长度,来调整比例系数(K比例带PB), 实物上通过比例带旋钮可以左右移动反馈波纹管的位置来实 现。
微分阀Rd开度越大,微分消失得越快,即微分时间Td 越 短,微分作用越弱;反之亦然。
当微分消失后,调节器的输出大小与偏差成比例,比例 作用的强弱由负反馈波纹管的位置进行调整。
§1-3-3 比例微分作用规律
DLMU
小结
1、微分作用具有超前调节的功能,输出减小的过程即为微分 消失过程;
2、微分作用不能单独用作调节器,一般与比例或者比例积分 一起构成PD或者PID调节器;
Company name
调节器及调节作用规律
轮机自动化教研室
DLMU
引言
r(t)
+-
e(t) 调节器
p(t)
b(t)
执行 q(t) 机构
测量 单元
f(t)
控制 y(t) 对象
DLMU
引言
– 系统为偏差驱动 – 调节器的输入是被控量的偏差值 – 调节器的输出是控制量 – 可看作一个对象或环节 – 调节器的作用规律:
§1-3-2 比例作用规律
DLMU
2、比例带δ(或 PB):是指调节器的相对输入量与相对输出 量之比的百分数.
PB( ) e / X imax 100% X Omax e 100 R 100%
p / X O max
调节器及其调节规律

• 三、比例微分调节规律PD: • 1、概念: • 理想的比例微分调节规律,其表达式为:
P
Kp(e
Td
de dt
)
• 式中:Kp—比例系数;Td—微分时间;
•
de/dt—偏差的变化速度;
• 比例微分调节器的输出等于比例作用的输出和 微分作用的输出之和。比例度和微分时间是比例 微分调节器的两个重要特性参数。其大小反映了 比例作用和微分作用的强弱。
•
dP dt
= KIe
• 可见,只要偏差存在,调节器的输出就会变
化,只有e=0,输出信号才不再继续变化,执
行器才停止动作,系统才能稳定不来。
2、实例分析:
• 3、特点:
• a)积分调节完毕,能消除被控参数的静差。 • b)积分调节作用比较缓慢。 • c)积分作用的引入,会降低系统的稳定 • 性,最大动态偏差较大,调节时间增加。 • d)积分调节规律,容易使调节器输出产 • 生饱和状态。 • 总之,积分调节规律动态性能差,在实际
• 当t=T,PD= A( Kd-1)e-T/T=0.368 A( Kd-1)
• 可见:微分作用的输出下降了63.2%所需的时间
•
为时间常数T。
•
∴微分时间Td=Kd×T
• 3、不同时间常数下的阶跃响应曲线:
T1>T2>T3
• 微分时间Td表征微分作用的强弱,当T大,Td长, 微分作用强;反之Td短,微分作用弱。
• d)只适用于惯性较大的系统。
• 二、微分器:
• 1、何为微分器:
•
即比例微分调节,比例带PB=100%。对
阶
跃输入,输出瞬时增大到某数值,然后慢慢降
到和阶跃输入相等的值。
自校正控制

)
当j<0时, f j = 0, g j = 0, f0 = 1,
ng ≥ n
或
nf ≥ n
比较上式两边的系数可得: F(z−1) 或 G ( z −1 )的阶次大于或等于 也就是说,
对象的阶次,闭环系统才是可辨识的。
自校正条件器的最小方差控制策略
在工业过程控制中,被调量通常指受随机扰动影响的过程的输 出,这些过程的输出都要求对其给定值的波动尽可能小。也就 是说,其控制目标是使输出的稳态方差尽可能小,所以成为最 −k −1 −1 小方差控制。 z B( z ) C(z )
上式第2个等号右边第二部分不可控,因而要使上式的值最小,必须第二部分为零,即
E ( z −1 ) y (t + k / t ) = y (t ) −1 C (z )
∧
即为最小方差预报律
最小预报的方差和误差如下:
E{ y (t + k / t ) 2 } = E{[ D ( z −1 ) w(t + k )]2 } = (1 + d12 + ⋯ + d k2−1 )σ 2 y (t + k / t ) = D ( z −1 ) w(t + k )
由自校正调节过程可知,实现自校正调节过程必须解决下 述三个问题: (1)对过程进行在线参数估计,它的特点是在闭环条件下 进行,这时输入u(t)通过调节器和输出y(t)联系起来了,因 而和一般的辨识条件不同,这就存在着闭环可辨识条件的 问题; (2)设计最小方差控制律,一边利用过程参数估计值对调 节器的参数进行修改,达到最小方差的最优性能指标。 (3)设计在计算机上如何完成最小方差控制的算法。
u (t )
y (t )
自校正调节器原理图
燃气轮机与联合循环(第13课 燃气轮机的控制)

+ (Pgt )c 燃气轮机
+
Pgto
agt
+ Po
+-
+
Kst
(Pst )c
汽轮机
Psto
(a)
(b)
Kgt
+ (Pgt ) c + +-
燃气轮机
Pgto
Pc
agt ast
+ Po
+
+-
Kst
+
汽轮机
Psto
+ (Pst )c
(c)
功率测量元件
位置测量元件
燃料阀位 控制子回路
功率控制主回路
(1)暂态漂移过程
——暂态一次调频
(2)自动校正过程
——解除一次调频
3.功率与频率联合扰动下的自动调节
——基本等同于两个过程的简单叠加
4.内扰作用下的自动调节
如燃料压力、热值变化
Vcm VcT
n
Vw
功
(Pgt )c
(Pgt )
率 调
nc
(Pgt )h
a0 -
ncor ncor Kn
组
位置测量元件
IGV角度 控制子回路
n 转速测量元件 IGV防喘振控制主回路
温度测量元件
IGV辅助温控主回路
五、燃气轮机的DLN燃烧控制
➢任务:分配燃料→燃烧效率、稳定性,抑制 N O x
ASV
pf SRV
GCV1
至D5
至PM1 GCV2
GCV3 (a)
至PM4
PM4
防喘振调节器 (P)
a0 -
ncor ncor Kn
自动控制原理课程设计---单位负反馈系统设计校正
自动控制原理课程设计---单位负反馈系统设计校正
单位负反馈系统是自动控制原理课程设计中的重要内容,它是将输入信号与反馈信号进行比较、控制,从而达到调节系统性能的一种手段。
其目的是提高系统的稳定性和可靠性,缩小输入量的波动对输出量的影响,保持系统性能的稳定性和提高系统的控制性能,增强系统的鲁棒性。
系统的校正是保证其良好性能的前提,系统校正理论是所有反馈控制系统的基础之一,是实现系统自动控制的根本。
一、系统校正要点
1、调节器模式:调节器的类型是校正的核心,调节器的模式决定着反馈控制系统的性能。
常用的调节器有PI、PD、PID参数调节器,应根据实际情况灵活选择。
2、参数校正:选择调节器模式后,需要进行具体参数的校正,校正的过程一般有两种:经验法和数学模型法可以采用。
3、现场校正:现场校正过程主要是现场对参数进行实践调整,包括检查输入信号校正等,此类校正只能通过仪器进行,由于仪器的精度不同,校正效果也会有所不一样。
二、系统校正实施
1、系统检查:在校正实施前需要进行系统检查,检查项包括仪表精度以及反馈控制系统的结构与结构,检查后才能确定最佳的参数;
2、参数设置:在校正过程中,参数设置是提高反馈控制系统可用性的关键,特别是PID参数的调节,这要求改变参数时,要结合理论,灵活调整,以保证系统满足要求;
3、系统性能:在系统校正完成后,对系统性能进行检查,要求系统要满足设定的所有参数,结果必须与预期的结果保持一致,否则可以继续微调参数设置,以更好的满足需要。
总之,系统校正是自动控制原理中重要的一环,它既涉及到调整调节器参数,也涉及到系统调试等过程,必须根据实际情况,灵活选择,层层检查,从而实现反馈控制系统的良好性能。
现代控制理论自校正控制

控制对象参数ˆ 。参数估计的常用算法 有随机逼近法、最小二乘法、极大似然 法等。调节器的功用是根据参数估计器 不断送来的参数估值 ˆ 。
图16-1
通过一定的控制算法,按某一性能指标不断地形成最优 控制作用。调节器的常用算法有最小方差、希望极点配置、 二次型指标等。其中,以用最小二乘法进行参数估计,按最 小方差来形成控制作用的自校正控制最为简单,并在战术导 弹控制中获得了实际应用。
自动驾驶仪
到目前为止,在先进的科技领域出现了许多形式不同的自 适应控制方案,但比较成熟并已获得实际应用的可以概括成 两大类: ⑴ 模型参考自适应控制; ⑵ 自校正控制。
自适应控制的应用领域
模型参考自适应控制需在控制系统中设置一 个参考模型,要求系统在运行过程中的动态 响应与参考模型的动态响应相一致(状态一 致或输出一致),当出现误差时便将误差信 号输入给参数自动调节装置,来改变控制器 参数,或产生等效的附加控制作用,使误差 逐步趋于消失。在这方面法国学者朗道(ndau) 把超稳 定性理论应用到模型参考自适应控制中来,做出了杰出贡献 。
1 d12 L
d2 m1
2
这样,我们得到了为输出序列线性函数的最优控制规律,因 此可以很方便地实现闭环控制。
第二节 最小方差自校正调节器
在第一节的讨论中,假设被控对象的模型已知,因此它 属于随机控制问题。最小方差自校正调节器所要解决的问题 是被控对象参数未知时的最小方差控制问题。这里,首先应 该通过适当的方法进行参数估计,然后以参数的估值来代替 实际的参数,按最小方差指标综合最优控制规律。
(16-15)
在辨识中,这类模型称为被控自回归滑动平均模型CARMA。
第一节 最小方差控制律
第6章自校正控制.
某种辨识方法 + 某种最优调节器 = 某类自校正调节器 最小方差自校正调节器 = 最小二乘估计方法 + 最小方差控制器
6.1 最小方差自校正调节器
(Minimum Variance Self-tuning Regulator)
一 被控对象的数学描述
y(k ) a1 y(k - 1) an y(k - n) b0 u (k - m ) b1u (k - m - 1) bn u (k - m - n) e(k ) c1e(k - 1) cne(k - n)
一步预报(m=1)
y (k 1) ay(k ) e(k 1) ce(k ) e(k )-white nose ˆ (k 1/ k ) y(k 1/ k ) u (k ) y y (k 1) aq y (k 1) e(k 1) cq e(k 1) (1 aq ) y (k 1) (1 cq )e(k 1)
2
设计步骤: — 假定 A(q -1 ), B(q -1 ), C (q -1 ) 已知, 在随机环境下综合
* 出最小方差控制 u ( k )
1、最优预报问题 2、最优控制问题
考虑系统的滞后问题 u(k) → y(k+m) 修改性能指标为: J E{[ y( k m ) - yr ( k m )]2 } ˆ (k m k ) — 在k时刻估计 y
-1
(2) 求解步骤
C ( q -1 ) y( k m ) e( k m ) -1 A(q )
1. 求出y(k+m)的表达式,分解成与Yk 独立和不独立的 -1 两部分。 C (q -1 ) E ( q ) -1 -m
第三章 自校正控制系统-3

)
y∗ k+d
k
=
G(z−1) yk
+
F ( z−1 ) B( z−1 )uk
+δk
23/34
3-4 自校正调节器(STR)
6.对模型偏差δ的补偿 将yk和uk系数多项式G(z-1)和F(z-1)B(z-1)的
参数与δk一起构成参数向量θ ,在数据向量中 与δk对应的数据为1,可以用在线辨识的办法辨 识出G(z-1)和F(z-1)B(z-1)及δk的参数来。
的,采用带遗忘因子的算法,有
12/34
2
3-4 自校正调节器(STR)
( ) θ k = θ k−1 + Kk yk − β0uk−d − ϕkT−dθˆk−1
Kk
=
ρ
ϕ Pk−1 k−d
+
ϕ
T k−d
Pk
−1ϕ
k
−d
⑤
( ) Pk
=
1 ρ
I
−
K
kϕ
T k−d
Pk −1
ρ遗忘因子
3.确定最小方差控制律
四、计算步骤和框图
1. 确定控制对象模型结构na、nb,d,并选预报模 型及β0①②
yk +d = α ( z −1 ) yk + β ( z −1 )uk + ωk +d
①
yk+d = β0uk +ϕkTθ +ωk+d
②
2. 设定参数初值 θˆ0 = 0, P0 =106 I,u0 = 0
3. 采样获取观测数据yk,并组成观测向量ϕk③和
当设定输出ym=0,系统只起调节作用时,
yk+d = β0uk + ϕkTθ + ωk+d
自适应控制基本原理-自校正控制
(2.48)
2.2 动态过程参数估计的最小二乘法
2.2.1 基本最小二乘方法
y(n 1) a1 y(n) an y(1) b0u(n 1) bnu(1) (n 1) y(n 2) a1 y(n 1) an y(2) b0u(n 2) bnu(2) (n 2)
u(n 2)
u(2)
y(n N 1) y(N ) u(n N ) u(N )
y(N) Φ(N)θ(N) ξ(N)
(2.49)
θˆ (ΦTΦ)1ΦT y
(2.54)
增加一个新的观测数据 u(n N 1), y(n N 1) ,则
(2.45a) (2.45b)
(k) 为独立的随机噪声,要求其满足
E( (k)) 0
(2.46a)
2 E{ (i) ( j)}
i j
0 i j
(2.46b)
lim
1
N
(k)2
N N
k 1
(2.46c)
随机噪声的均值为零,彼此相互独立,方差为有限正值,噪声的采样均方值有界。
如何解决上述问题?
2.2 动态过程参数估计的最小二乘法
2.2.2 递推最小二乘方法
y(n 1)
y(N)
y(n
2)
y(n
N
)
y(n) y(1) u(n 1) u(1)
Φ(N)
y(n 1)
y(2)
θˆ(N 1) ΦT (N)Φ(N) (N 1) T (N 1) 1 ΦT (N) y(N) (N 1)y(N 1) (2.57)
自适应控制基本原理-自校正控制
2.2 动态过程参数估计的最小二乘法
2.2.1 基本最小二乘方法
A(z1) y(k) B(z1)u(k) (k)
A(z1) 1 a1z1 an zn B(z1) b0 b1z1 bn zn
记:
θ [a1, a2 ,, an ,b0 ,b1,,bn ]T
自校正控制
自校正控制
最小方差自校正控制器 极点配置自校正控制器 自校正PID控制
自校正控制
自校正控制系统又称自优化控制或模型辨识自适应控制。
通过采集的过程输入、输出信息,实现过程模型的在线辨识和参数估计。 在获得的过程模型或估计参数的基础上,按照一定的性能优化准则,计算控 制参数,使得闭环系统能够达到最优的控制品质。
矩阵求逆定理 设A 、C 和 BCD均为非奇异矩阵,则
A BCD 1 A1 A1B C 1 DA1B 1 DA1
(2.58)
令
P(N) ΦT (N)Φ(N) 1
(2.59)
2.2 动态过程参数估计的最小二乘法
2.2.2 递推最小二乘方法
P(N 1) ΦT (N)Φ(N) (N 1) T (N 1) 1 P1(N) (N 1) T (N 1) 1
(2.45a) (2.45b)
(k) 为独立的随机噪声,要求其满足
E( (k)) 0
(2.46a)
2 E{ (i) ( j)}
i j
0 i j
(2.46b)
lim
1
N
(k)2
N N
k 1
(2.46c)
随机噪声的均值为零,彼此相互独立,方差为有限正值,噪声的采样均方值有界。
自适应控制--自校正控制.详解

1
2
n
1
2
n
1
2
m
1
2
n
1
2
n
y (t1 ) 1 x1 (t1 ) 2 x2 (t1 ) n xn (t1 ) y (t ) x (t ) x (t ) x (t ) 2 1 1 2 2 2 2 n n 2 y (t m ) 1 x1 (t m ) 2 x2 (t m ) n xn (t m ) 矩阵向量形式:i.e Y X y (t1 ) x1 (t1 ) x2 (t1 ) y (t ) x (t ) x (t ) 2 2 Y 2 , X 1 2 y (t m ) x1 (t m ) x2 (t m )
(2)递推最小二乘估计算法:
T ( N 1) ( N ) K ( N 1)[ y ( N 1) ( N 1) ( N )] P( N ) ( N 1) K ( N 1) T 1 ( N 1) P( N ) ( N 1) P( N 1) [ I K ( N 1) T ( N 1)]P( N )
补充:什么是最小二乘算法?
实例1:量测电压 第一次 第二次 220V 210V 平均215V
ˆ e1 220 u 第一次误差: ˆ 设电压估计值为u ˆ e2 210 u 第二次误差: 准则:使误差平方和最小。
2 ˆ ) 2 (210 u ˆ ) 2 min 最小二乘准则:J e12 e2 (220 u
ˆ e ˆi 描述: yi hi x
准则:
单输入单输出最小方差自校正调节器
ˆ t d t J E y t d y
因此
2
2 F G ˆ t d t E F t d u t y t y C C
E F t d
Gq
1
1
n f
n f nb d 1
ng na 1
g
1
0
g1 q g ng q
1
ng
这时,最优预测模型的方差为
E ~ y t d t
2
d 1 2 2 1 f i i 1
证明: 把 C q 1
四、分析 (1)控制
G r t yt u t 1 BF 1 q
C q 1 F q 1 1 q 1 A q 1 q d G q 1
(2)输出
G 1 y t r t d 1 q F (t ) C
三、定理 对于原系统模型,寻求使与其相应的目标函 数极小的容许控制规律,等价于由辅助系统模 型寻求使与其相应的目标函数为极小的加权最 小方差控制规律,与最小方差控制类似,这个 规律由广义输出最优预测模型决定
பைடு நூலகம்
t d t Py t d t ut Rrt 0
代入被控对象方程得
B G y t d F t d u t t A A
结合
A B t y t u t d C C
可知
F G y t d F t d u t y t C C
最小方差控制
2 最小方差控制
最小方差控制的目的是要确定u(k),使得输出的方差为最 小,由于u(k)最早只能影响到y(k+d),因此选择性能指标为
J E{ y(k d ) }
2
(14)
上式可改写为:
ˆ (k d k ) ~ J E{ y (k d ) 2 } E{[ y y (k d k )]2 } ˆ (k d k ) 2 } E{~ E{ y y (k d k ) 2 }
在最小方差调节器的研究中,所讨论的被控系统的模型为 A(q-1)y(k)=B(q-1)u(k-d)+C(q-1)e(k) (1)
1 1 n A ( q ) 1 a q a q 其中: 1 n
B (q 1 ) b0 b1q 1 bn q n C (q 1 ) 1 c1q 1 cn q n
刻及以前的输入输出的函数。若对预测的要求是使预测的误差平 方即系统误差的方差为最小,则损失函数可表示为:
ˆ (k d k ) y (k d )]2 } J E{[ y
1 1 1 B ( q ) F ( q ) G ( q ) 1 2 ˆ ( k d k ) F ( q )e( k d ) E{[ y u ( k ) y ( k )] } 1 1 C (q ) C (q ) (10) 上式中F(q-1)e(k+d)与其它项均不相关,且由于{e(k)}为零均值 白噪声序列,式(10)可写为
1 最小方差预测
设在k时刻已观测到输出值y(k),y(k-1),…等,希望由此得到预 测值 y ˆ (k d k ) 。
1 1 B ( q ) C ( q ) 由式(1)有: y (k d ) u (k ) e(k d ) 1 1 A(q ) A(q )
自适应控制(研究生经典教材)

自适应控制Adaptive control1.关于控制2.关于自适应控制3.模型参考自适应控制4.自校正控制5.自适应替代方案6.预测控制参考文献主要章节内容说明:第一部分:第一章自适应律的设计§1.参数最优化方法§2.基于Lyapunov稳定性理论的方法§3.超稳定性理论在自适应控制中的应用第二章误差模型§1.Narendra误差模型§2.增广矩阵§3.线性误差模型第三章MRAC的设计和实现第四章小结第二部分:第一章模型辨识及控制器设计§1.系统模型:CARMA模型§2.参数估计:LS法§3.控制器的设计方法:利用传递函数模型§4.自校正第二章最小方差自校正控制§1.最小方差自校正调节器§2.广义最小方差自校正控制第三章极点配置自校正控制§1.间接自校正§2.直接自校正1.About control engineering education1)control curriculum basic concept(1)dynamic system●The processes and plants that are controlled have responses that evolvein time with memory of past responses●The most common mathematical tool used to describe dynamic system isthe ordinary differential equation (ODE).●First approximate the equation as linear and time-invariant. Thenextensions can be made from this foundation that are nonlinear 、time-varying、sampled-data、distributed parameter and so on.●Method of building model (or equation )a)Idea of writing equations of motion based on the physics andchemistry of the situation.b)That of system identification based on experimental data.●Part of understanding the dynamical system requires understanding theperformance limitations and expectation of the system.2.stabilityWith stability, the system can at least be used●Classical control design method, are based on a stability test.Root locus 根轨迹Bode‟s frequency response 波特图Nyquist stability criterion 奈奎斯特判据●Optimal control, especially linear-quadratic Gaussian (LQG) control (线性二次型高斯问题) was always haunted by the fact that method did notinclude a guarantee of margin of stability.The theory and techniques of robust (鲁棒)design have been developedas alternative to LQG●In the realm of nonlinear control, including adaptive control, it iscommon practice to base the design on Lyapunov function in order to beable to guarantee stability of final result.3.feedbackMany open-loop devices such as programmable logic controllers (PLC) are in use, their design and use are not part of control engineering.●The introduction of feedback brings costs as well as benefits. Among thecosts are need for both actuators and sensors, especially sensors.●Actuator defines the control authority and set the limits of speed indynamic response.●Sensor via their inevitable noise, limit the ultimate(最终) accuracy ofcontrol within these limits, feedback affords the benefit of improveddynamic response and stability margins, improved disturbancerejection(拒绝) ,and improved robustness to parameter variability.●The trade off between costs and benefits of feedback is at the center ofcontrol design.4.Dynamic compensation●In beginning there was PID compensation, today remaining a widely usedelement of control, especially in the process control.●Other compensation approaches : lead-and-log networks (超前-滞后)observer-based compensators include : pole placement, LQG designs.●Of increasing interest are designs capable of including trade-off amongstability, dynamic response and parameter robustness.Include: Q parameterization, adaptive schemes.Such as self-tuning regulators, neural-network-based-controllers.二、historical perspectives (透视)●Most of early control manifestations appear as simple on-off (bang-bang)controllers with empirical (实验;经验性的) setting much dependent uponexperience.●The following advances such as Routhis and Hurwitz stability analysis(1877).Lyapunov‟s state model and nonlinear stability criteria(判据) (1890) .Sperry‟s early work on gyroscope and autopilots (1910), and Sikorsky‟swork on ship steering (1923)Take differential equation, Heaviside operators and Laplace transform astheir tools.●电机工程(electrical engineering)The largely changed in the late 1920s and 1930s with Black‟s developmentof the feedback electronic amplifier, Bush‟s differential analyzer, Nyquist‟sstability criterion and Bode‟s frequency response methods.The electrical engineering problems faced usually had vary complex albeitmostly linear model and had arbitrary (独立的;随机的) and wide-ringingdynamics.●过程控制(process control in chemical engineering)Most of the progress controlled were complex and highly nonlinear, butusually had relatively docile (易于处理的) dynamics.One major outcome of this type of work was Ziegler-Nichols‟PIDthres-term controller. This control approach is still in use today, worldwidewith relatively minor modifications and upgrades (including sampled dataPID controllers with feed forward control, anti-integrator-windupcontrollers :抗积分饱和,and fuzzy logic implementations).●机械工程(mechanical engineering)The application of controls in mechanical engineering dealt mostly in thebeginning with mechanism controls, such as servomechanisms, governorsand robots.Some typical control application areas now include manufacturing processcontrols, vehicle dynamic and safety control, biomedical devices and geneticprocess research.Some early methodological outcomes were the olden burger-Kahenbugerdescribing function method of equivalent linearization, and minimum-time,bang-bang control.●航空工程(aeronautical engineering )The problems were generally a hybrid (混合) of well-modeled mechanicsplus marginally understood fluid dynamics. The models were often weaklynonlinear, and the dynamics were sometimes unstable.Major contributions to framework of controls as discipline were Evan‟s rootlocus (1948) and gain-scheduling.●Additional major contributions to growth of the discipline of control over thelast 30-40 years have tended to be independent of traditional disciplines.Examples include:Pontryagin‟s maximum principle (1956) 庞特里金Bellman‟s dynamic programming (1957)贝尔曼Kalman‟s optimal estimation (1960)And the recent advances in robust control.三、Abstract thoughts on curriculum●The possibilities for topic to teach are sufficiently great. If one tries topresent proofs of all theoretical results. One is in danger of giving thestudents many mathematical details with little physical intuition orappreciation for the purposes for which the system is designed.●Control is based on two distinct streams of thought. One stream is physicaland discipline-based. Because one must always be controlling some thing.The other stream is mathematics-based, because the basis concepts ofstability and feedback are fundamentally abstract concepts best expressedmathematically. This duality(两重性) has raised, over the years, regularcomplaints about the …gap‟ between theory and practice.●The control curriculum typically begins with one or two courses designed topresent an overview of control based on linear, constant, ODE models,s-plane and Nyquist‟s stability ideas, SISO feedback and PID, lead-lay andpole-placement compensation.These introductory courses can then be followed by courses in linear systemtheory, digital of control, optimal control, advanced theory of feedback, andsystem identification.四、Main control courses●Introduction to controlLumped system theoryNonlinear controlOptimal controlAdaptive controlRobot controlDigital controlModeling and simulationAdvanced theoryStochastic processesLarge scale multivariable systemManufacturing systemFuzzy logic Neural Networks外文期刊:《Automatic》IFAC 国际自动控制联合会Computer and control abstractsIEEE translations on Automatic controlAutomation●Specialized \ experimental courses✓Intelligent controlApplication of Artificial IntelligenceSimulation and optimization of lager scale systems robust control ✓System identification✓Microcomputer-based control systemDiscrete-event systemsParallel and Distributed computationNumerical optimization methodsNumerical system theory●Top key works from 1963-1995 in IIACAdaptive control 305Optimal control 277Identification 255Parameter estimation 244Stability 217Linear system 184Non-linear systems 168Robust control 158Discrete-time systems 143Multivariable systems 140Robustness 140Multivariable systems control systems 110Optimization 110Computer control 104Large-scale systems 103Kalman filter 102Modeling 107为什么自适应 《Astrom 》chapter 1✓ 反馈可以消除扰动。
第13讲 最小方差调节器和自校正调节器
(7)
(证毕).
1 最小方差调节器(5/6)
对于Astrom的最小方差调节器,有两种实现方法: 一为用数字器件实现的传递函数型控制器,如
G( z 1 ) u (k ) y (k ) 1 1 B( z ) F ( z )
另一为可用数字计算机实现的在线递推计算型控制器,如
G ( z 1 ) u (k ) y (k ) 1 (z ) 1 [ g 0 y (k ) ... g ng y (k ng ) 1u (k 1) ...
那么,在最优指标函数
J=E{[y(k+d)]2} 下,其最小方差调节律和最小方差调节误差分别为 (1)
u(k)=-[G/(BF)]y(k)
y(k)=Fw(k)=w(k)+f1w(k-1)+...+fd-1w(k-d+1) 其中F和G满足当P(z-1)=1时的丢番图方程,即
(2)
(3)
C=AF+z-dG
1 最小方差调节器(3/6)
证明 设y(k+d/k)和y~(k+d/k)分别为y(k+d)在k时刻的d步最优预 报和最优预报误差. 因此,被控系统输出量的方差为 J=E{[y(k+d)]2}=E{[y(k+d/k)+y~(k+d/k)]2} =E{[y(k+d/k)]2}+E{[y~(k+d/k)]2}+2E{y(k+d/k)y~(k+d/k)} =E{[y(k+d/k)]2}+E{[y~(k+d/k)]2} E{[y~(k+d/k)]2} (4) 要使(4)式所示的输出量的方差为最小,即把上式的不等式 取等式即可.因此,令 y(k+d/k)=0 可求得最优调节律. 最优预报误差y~(k+d/k)与最优预报
最小方差自校正控制

用最小方差自校正控制算法对以下系统进行闭环控制:y(k) -1.7y(k -1) 0.7y(k - 2) = u(k - 4) 0.5u(k - 5) (k) 0.2 (k -1) 式中(k)为方差为0.1的白噪声,取期望输出y r(k)为幅值为10的方波信号。
解:上式可以化为:(1 - 1.7z,0.7z')y(k)二z'(1 0.5z')u(k) (1 0.2zJ (k) 则有1 1 2A(z ) = 1-1.7z—0.7zA_JB(z ) = 1 0.5zC(z J) =1 0.2z Jd =4Diophantine 方程为:c(z‘)= A(Z')F(z‘)z“G(z‘)又有H(z」)二B(z」)F(z」)6 A取初值P(0)=10门(0) =0递推公式为:珂k)二珂k -1) K(k)[y(k) - 7(k- d户?(k -1)]K(k)- Pdgd)I ' 1+ 甲(k-d)P(k-1)?(k-d)[ P(k) = [l —K(k)叩(k —d)]P(k —1)程序清单如下:clear all; close all;na=length(a)-1; nb=length(b)-1; nc=length(c)-1;%多项式 A 、B、C 的阶次nh=nb+d-1; ng=na-1; %nh、ng 为多项式H、G 的阶次L=400;uk=zeros(d+nh,1); %输入初值:yk=zeros(d+ng,1); %输出初值yek=zeros(nc,1); %最优输出预测估计初值yrk=zeros(nc,1); %期望输出初值xik=zeros(nc,1); %白噪声初值yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)]; % 期望输出xi=sqrt(0.1)*randn(L,1); % 白噪声序列%递推估计初值thetaek=zeros(na+nb+d+nc,d);P=10A6*eye( na+n b+d+nc); %P(k )的初始值for k=1:Ltime(k)=k;y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb)+c*[xi(k);xik]; % 采集输出数据%递推增广最小二乘法公式估计参数phie=[yk(d:d+ng);uk(d:d+nh);-yek(1:nc)];K=P*phie/(1+phie'*P*phie); thetae(:,k)=thetaek(:,1)+K*(y(k)-phie'*thetaek(:,1));P=(eye(na+nb+d+nc)-K*phie')*P;ye=phie'*thetaek(:,d); %预测输出的估计值%提取辨识参数ge=thetae(1:ng+1,k)'; he=thetae(ng+2:ng+nh+2,k)';ce=[1 thetae(ng+nh+3:ng+nh+2+nc,k)'];if abs(ce(2))>0.9ce(2)=sign(ce(2))*0.9;endif he(1)<0.1 %设h0 的下界为0.1 he(1)=0.1;end u(k)=(-he(2:nh+1)*uk(1:nh)+ce*[yr(k+d:-1:k+d-min(d,nc));yrk(1:nc-d)]-ge*[y(k);yk( 1:na-1)])/he(1); %控制量%更新数据for i=d:-1:2thetaek(:,i)=thetaek(:,i-1);endthetaek(:,1)=thetae(:,k);for i=d+nh:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=d+ng:-1:2yk(i)=yk(i-1);endyk(1)=y(k);for i=nc:-1:2yek(i)=yek(i-1);yrk(i)=yrk(i-1);xik(i)=xik(i-1);endif nc>0yek(1)=ye;yrk(1)=yr(k);xik(1)=xi(k);endendfigure(1);subplot(2,1,1); plot(time,yr(1:L),'r:',time,y); xlabel('k'); ylabel('y_r(k) 、y(k)');legend('y_r(k)','y(k)'); axis([0 L -20 20]);subplot(2,1,2);plot(time,u);xlabel('k'); ylabel('u(k)'); axis([0 L -40 40]);figure(2)subplot(211) plot([1:L],thetae(1:ng+1,:),[1:L],thetae(ng+nh+3:ng+2+nh+nc,:)); xlabel('k'); ylabel('参数估计g、c'); legend('g_0','g_1','c_1'); axis([0 L -3 4]);subplot(212) plot([1:L],thetae(ng+2:ng+2+nh,:));xlabel('k'); ylabel('参数估计h');legend('h_0','h_1','h_2','h_3','h_4'); axis([0 L 0 4]);yr(k)y(k) o-2沁>3■呻卜•如2020o-4o20k2-2o20k432h计估数参o20)Kry)K(yc、g计估数参。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 最小方差调节器(4/6)
当P=1,j=d时,由第十三讲中的定理1可知,输出y(k)的d步最 优预报和最优预报误差分别为 y(k+d/k)=[Gy(k)+BFu(k)]/C (5) y~(k+d/k)=Fw(k+d) 故,系统的最小方差调节律为 u(k)=-[G/(BF)]y(k) 此时,最小方差调节误差为 y(k)=y~(k/k-d)=Fw(k)=w(k)+f1w(k-1)+...+fd-1w(k-d+1) (6)
自适应控制篇目录(1/2)
自适应控制篇
第10讲 自适应控制概述 第11讲 最优预报和自适应预报 第12讲 最小方差调节器和自校正调节器 第13讲 最小方差控制器与自校正控制器 第14讲 极点配置调节器与极点配置自校正调节器 第15讲 自校正PID调节器 第16讲 多变量自适应控制 第17讲 自适应信号处理与滤波 第18讲 模型参考自适应控制概述
这时,这种调节律就是渐近最优的了.
欲讨论参数未知时能调节系统输出方差至最小的STR,需先引 入参数已知时调节系统输出方差最小的最小方差调节器.
第十二讲 最小方差调节器和STR(3/3)
最小方差调节的基本思想是: 由于系统称中信道存在着d步时滞,这就使得当前的控制作 用u(k)要到d个采样周期后才能对输出产生影响. 因此,要获得输出方差最小,就必须对输出量提前d步进行 预报,然后根据预报值来计算适当的调节作用u(k). 这样,通过不断的预报和调节,就能始终保持输出量的稳态 方差为最小. 下面,我们将顺序讨论:
(7)
(证毕).
1 最小方差调节器(5/6)
对于Astrom的最小方差调节器,有两种实现方法: 一为用数字器件实现的传递函数型控制器,如
G( z 1 ) u (k ) y (k ) 1 1 B( z ) F ( z )
另一为可用数字计算机实现的在线递推计算型控制器,如
G ( z 1 ) u (k ) y (k ) 1 (z ) 1 [ g 0 y (k ) ... g ng y (k ng ) 1u (k 1) ...
二、 SA法
ˆ (k ) θ ˆ (k - 1) φ (k - d ) [ y (k ) -β ˆ (k - 1)] (19) ˆ 0u (k - d ) -φτ (k - d )θ θ r (k - 1) r (k - 1) r (k - 2) φτ (k - d )φ (k - d ) r (-1) 0 (20)
第十二讲 最小方差调节器和STR(2/3)
STR是以RLS参数估计方法在线估计最优预报模型,并在此基 础上以输出方差最小为调节指标的一种可以适应参数未知或 慢时变的自适应控制系统. 当被估计参数收敛时,则根据估计参数而推得的输出方差 最小调节律将收敛于被控系统参数已知时的输出方差最 小调节律.
一、 渐消记忆ELS法
ˆ (k ) θ ˆ (k - 1) K (k - 1)[ y (k ) -β ˆ (k - 1)] ˆ 0u (k - d ) -φ τ (k - d )θ θ 1 P(k - 1) [I - K (k - 1)φ τ (k - d )]P(k - 2), P(-1) 2 I λ P(k - 2)φ (k - d ) K (k - 1) λ φ τ (k - d )P(k - 2)φ (k - d ) (16) (17) (18)
自适应控制篇目录(2/2)
自适应控制篇(续)
第19讲 模型参考自适应系统的数学模型表示 第20讲 基于李氏稳定性理论的状态空间模型参考自适应控制 第21讲 基于李氏稳定性理论的输入输出方程模型参考自适应 控制 第22讲 基于Popov稳定性理论的状态空间模型参考自适应控 制 第23讲 神经网络自适应控制
第十二讲 最小方差调节器和STR(1/3)
第十二讲 最小方差调节器和自校正调节器
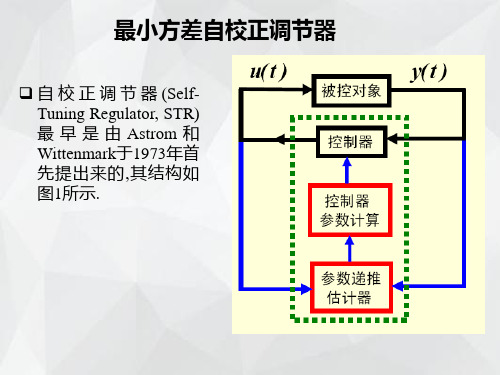
自校正调节器(Self-tuning Regulator, STR)最早是由Astrom和Wittenmark 于 1973 年首先提出来的 , 其结构如 图1所示.
u(k) y(k)
被控系统 控制器
控制器参数计算 (自适应机构) 参数估计器 图 1 自校正控制方法原理
3 STR(1/7)
3 自校正调节器(STR)
前面我们讨论了被控系统在参数已知时的随机离散系统的最 小方差调节规律,而STR主要解决被控系统参数未知或慢时变 时的最小方差调节问题. 对STR问题,与自适应预报类似,亦有直接法和间接法. 所谓间接法,即在每一控制(采样)周期先系统模型,然 后基于实时辨识模型求解丢番图方程,计算最小方差 调节律及相应的在线控制量.
那么,在最优指标函数
J=E{[y(k+d)]2} 下,其最小方差调节律和最小方差调节误差分别为 (1)
u(k)=-[G/(BF)]y(k)
y(k)=Fw(k)=w(k)+f1w(k-1)+...+fd-1w(k-d+1) 其中F和G满足当P(z-1)=1时的丢番图方程,即
(2)
(3)
C=AF+z-dG
3 STR(4/7)
因此,由定理1可得如下最小方差调节律 u(k)=-[G/(BF)]y(k) 其中G和F满足如下丢番图方程 1=AF+z-dG 基于预报模型(13),类似于前一讲中讨论的自适应预报,我们可 以递推估计预报模型(13)的未知参数.
3 STR(5/7)
为了保证预报模型(13)在闭环下的参数可辨识性的要求,可以 设定多项式(z-1)的首项系数0为一合理的估计值^0,则由式 (13)可列写出如下自回归方程 y(k+d)-^0u(k)=τ(k)+(k+d) (15) 其中
2 最小方差调节系统的闭环稳定性质(1/4)
2 最小方差调节系统的闭环稳定性质
由被控系统模型 Ay(k)=Bu(k-d)+Cw(k) 和最小方差调节律 u(k)=-[G/(BF)]y(k) 可得调节系统的闭环框图如图2所示.
w(k) C A z B + A
-d
u(k) -
+
y(k)
G 由图 2 可以导出最小方差调 BF 节系统的闭环方程 C/A 图2 最小方差调节器系统框图 y (k ) w(k ) d 1 z BG/BFA BFC w(k ) (8) d BFA z BG
1.44 y (k ) u (k ) 0.5 0.8z 1 或在线递推计算型控制器 u(k)=-2.88y(k)-1.6u(k-1)
1 最小方差调节器(7/6)
此时的输出误差的方差为 E{[y(k+2)]2}=E{[Fw(k+2)]2} =E{[(1+1.6z-1)w(k+2)]2} =(1+1.62)2=3.562
1 最小方差调节器(3/6)
证明 设y(k+d/k)和y~(k+d/k)分别为y(k+d)在k时刻的d步最优预 报和最优预报误差. 因此,被控系统输出量的方差为 J=E{[y(k+d)]2}=E{[y(k+d/k)+y~(k+d/k)]2} =E{[y(k+d/k)]2}+E{[y~(k+d/k)]2}+2E{y(k+d/k)y~(k+d/k)} =E{[y(k+d/k)]2}+E{[y~(k+d/k)]2} E{[y~(k+d/k)]2} (4) 要使(4)式所示的输出量的方差为最小,即把上式的不等式 取等式即可.因此,令 y(k+d/k)=0 可求得最优调节律. 最优预报误差y~(k+d/k)与最优预报
所谓直接法,则直接辨识系统的输出预报模型,以避免 在每一控制周期求解丢番图方程和计算最小方差调 节律.
3 STR(2/7)
下面主要介绍STR的直接法. STR的基本思想如图1所示.
下面,将讨论Astrom和Wittenmark最初提出的STR算法.
对被控系统
Ay(k)=Bu(k-d)+Cw(k), Astrom 和 Wittenmark 的 STR 算法考虑的是 C(z-1)=1 时,即系统所 受到的扰动可用白噪声建模的输出调节问题。 因此,系统输出y(k)的最优预报为: y(k+d)=y(k+d/k)+Fw(k+d)
θ [ g 0 - ... g ng β 1 ... β nβ ]τ φ (k ) [ y (k ) ... y (k - ng ) u (k - 1) ... u (k - nβ )]τ
自回归方程(15)的未知参数向量可由如下带遗忘因子的渐消 记忆ELS法和SA法来估计:
3 STR(6/7)
最小方差调节律、
最小方差调节闭环系统的稳定性问题, STR,以及
最小方差调节与自校正调节的计算机仿真.
1 最小方差调节器(1/6)
1 最小方差调节器
在最小方差调节器的研究中,所讨论的被控系统的模型为 A(z-1)y(k)=B(z-1)u(k-d)+C(z-1)w(k)
对该系统,有如下关于其最小方差调节律的定理. 定理1 对被控系统 A(z-1)y(k)=B(z-1)u(k-d)+C(z-1)w(k), 假设
1. 被控系统时滞时间d以及时滞算子z-1的多项式A、B和C的 阶次的上界以及系数都已知;
2. 被控系统为逆稳定系统,即多项式B(z-1)的所有零点都在单 位圆外;
1 最小方差调节器(2/6)
3. C(z-1)为稳定多项式,即它的所有零点都在单位圆外; 4. {w(k)}为白色噪声序列,且E{w2(k)}=2.